

Multi-Use Optimization of a Depot for Battery-Electric Heavy-Duty Trucks


Abstract
1. Introduction
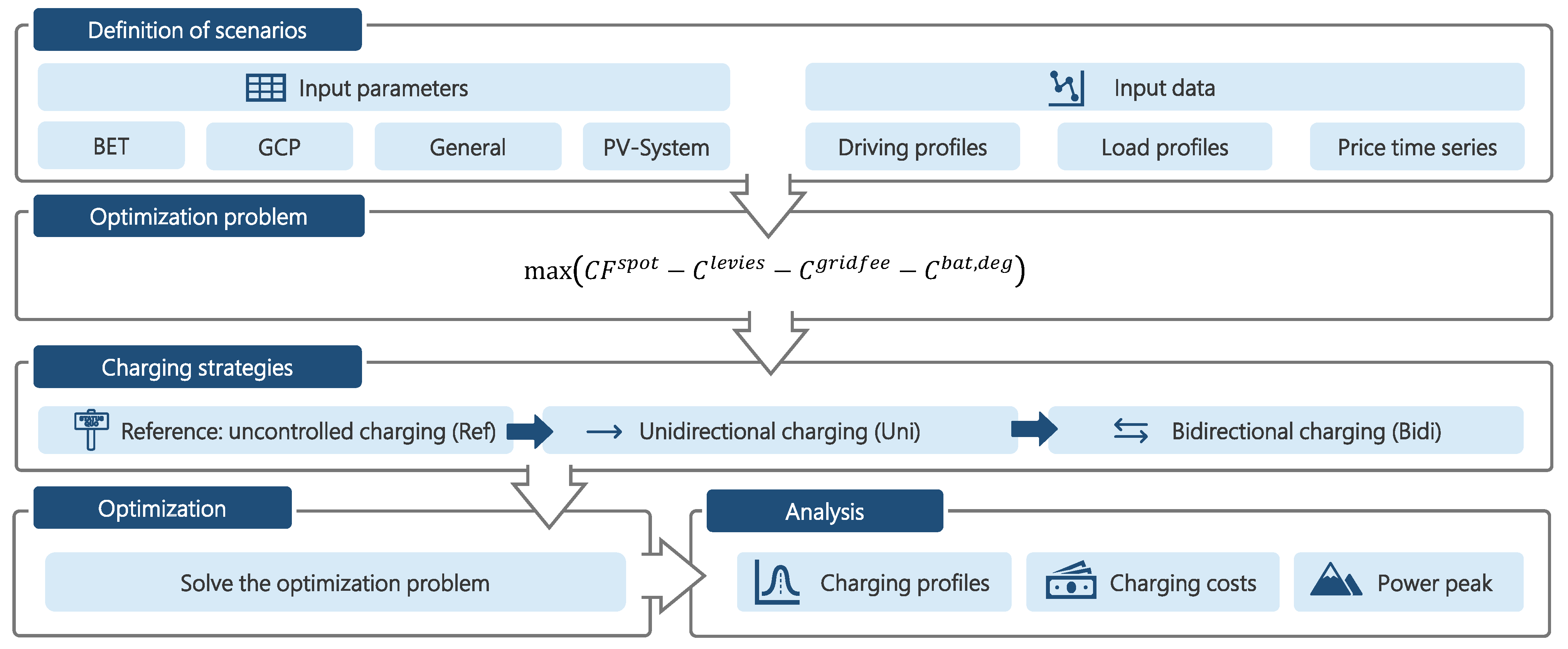
2. Materials and Methods
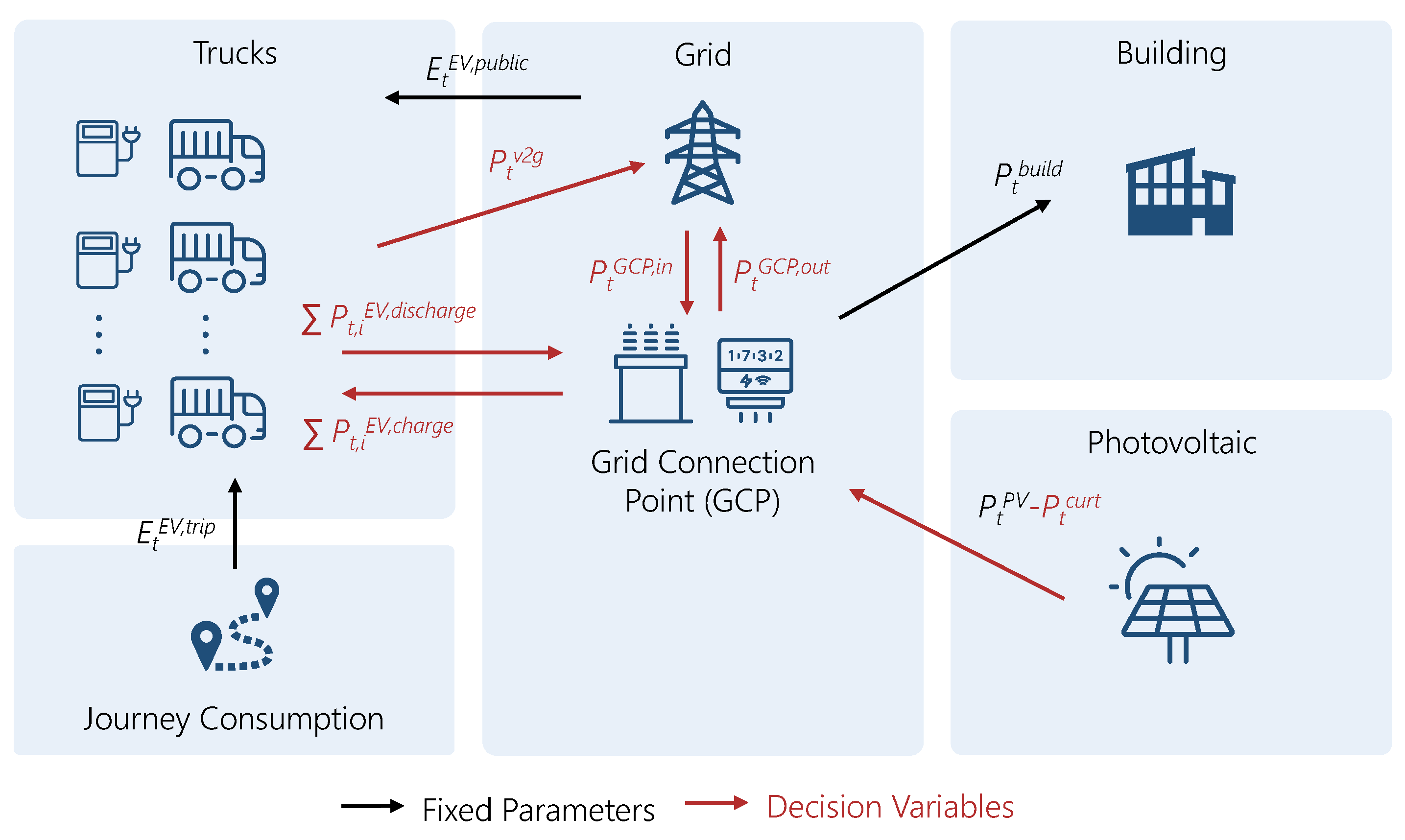
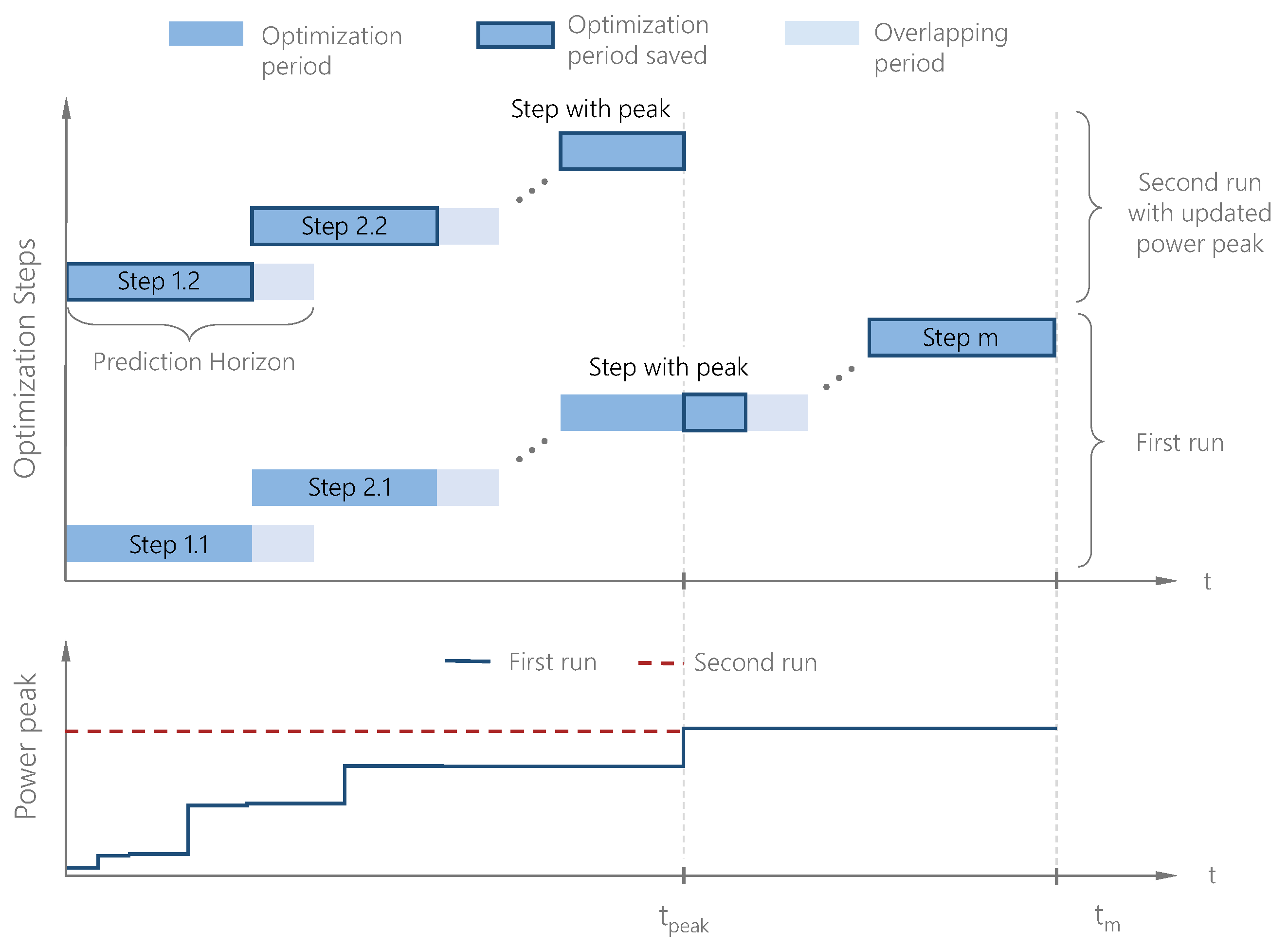
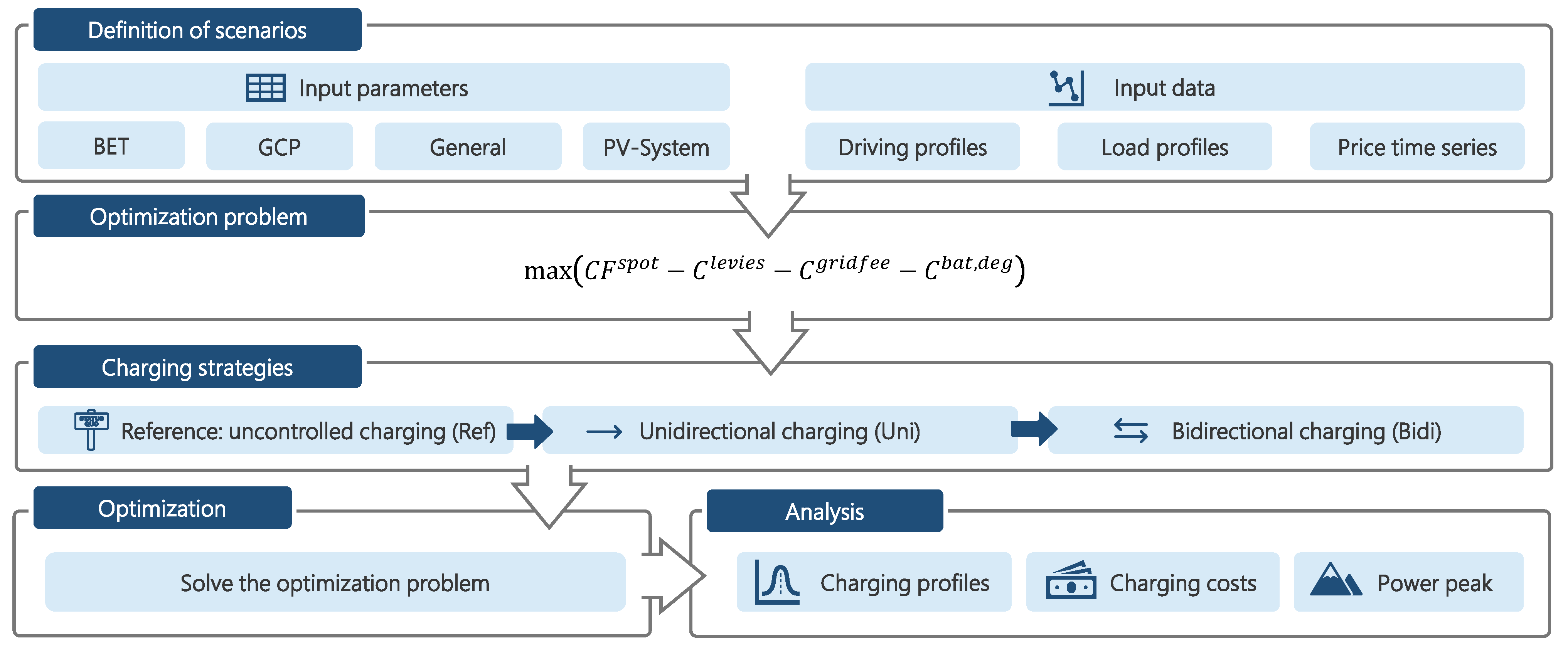
2.1. Optimization Model
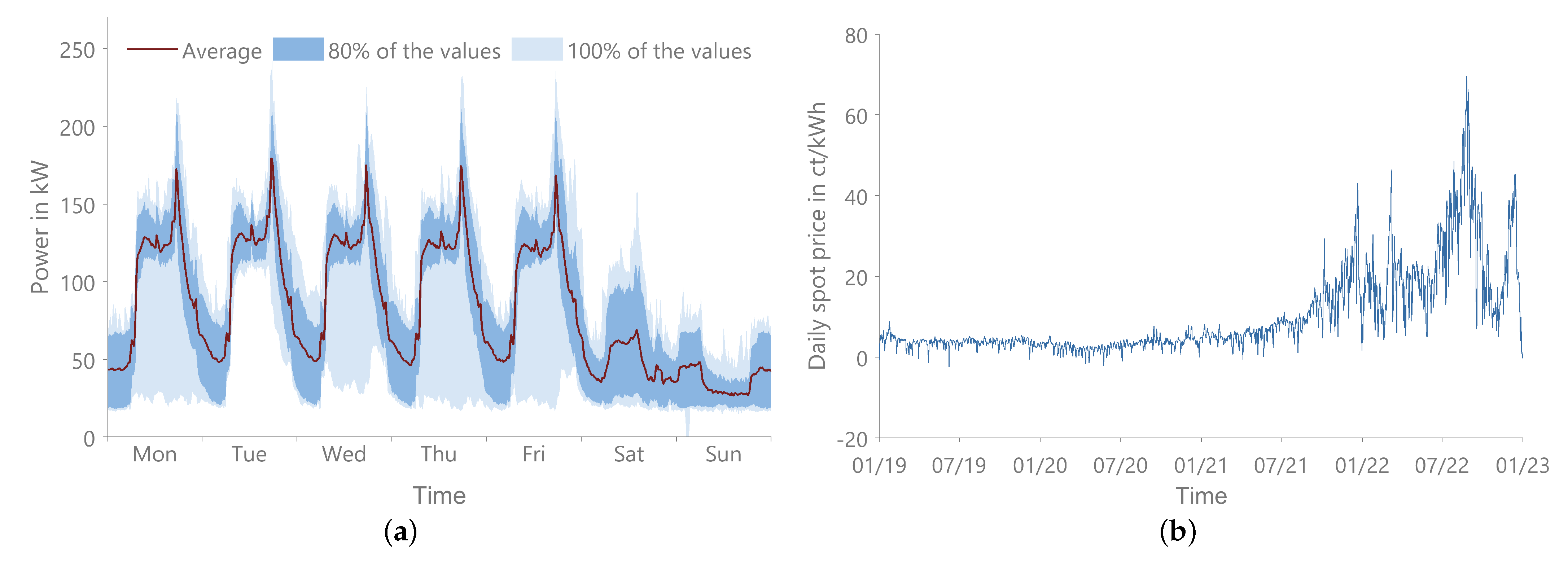
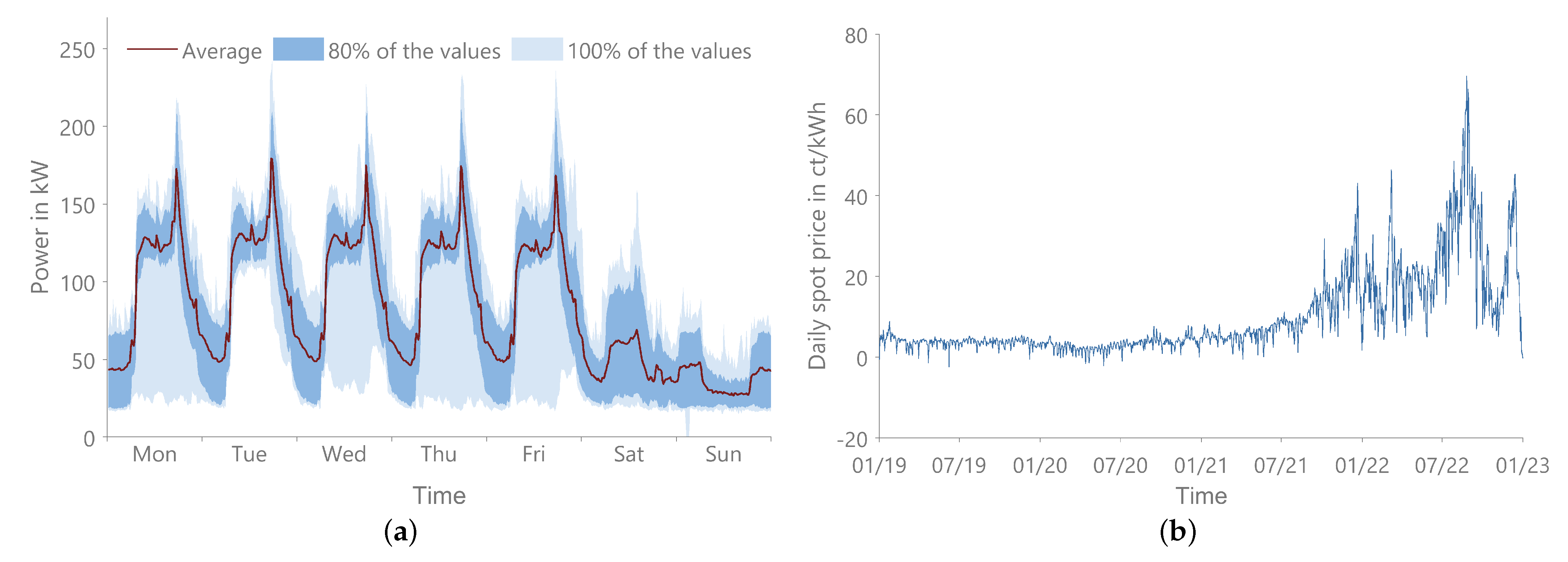
2.2. Input Data
2.3. Input Parameters
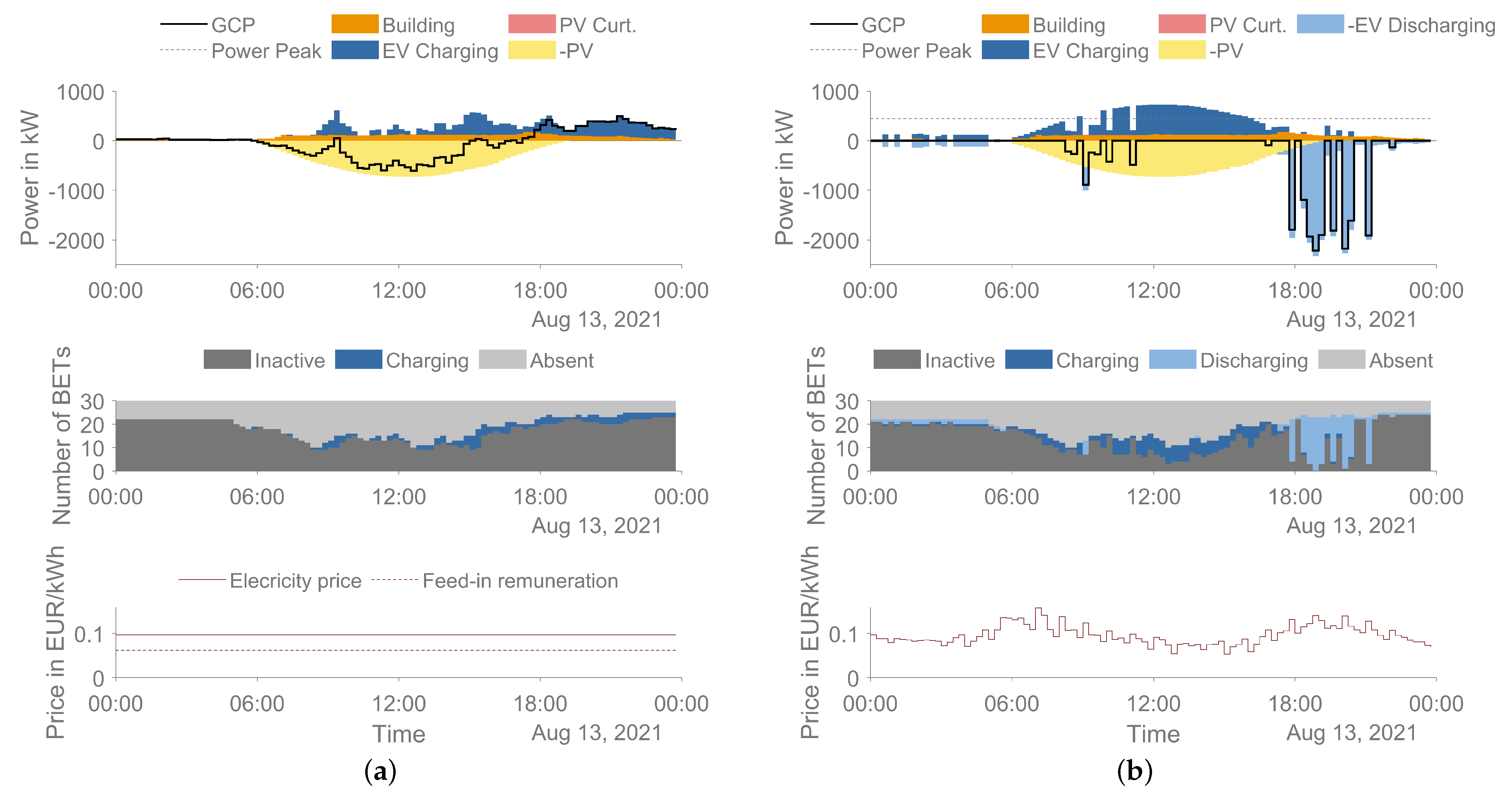
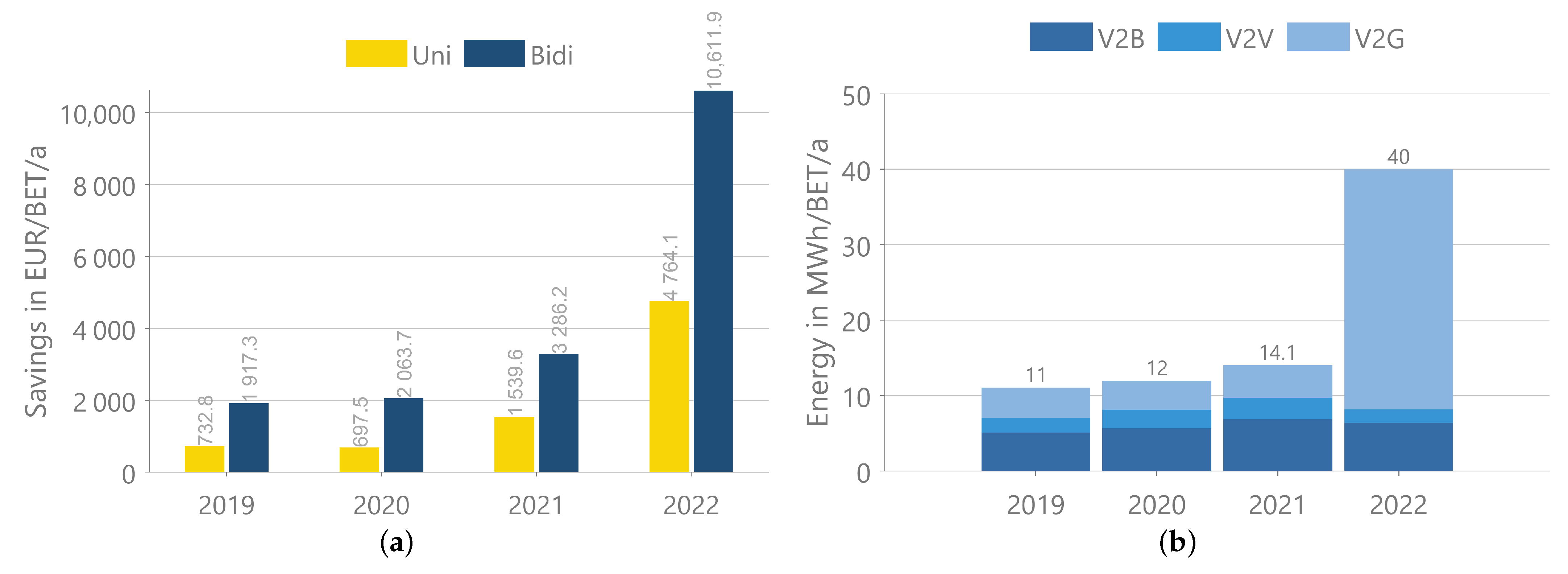
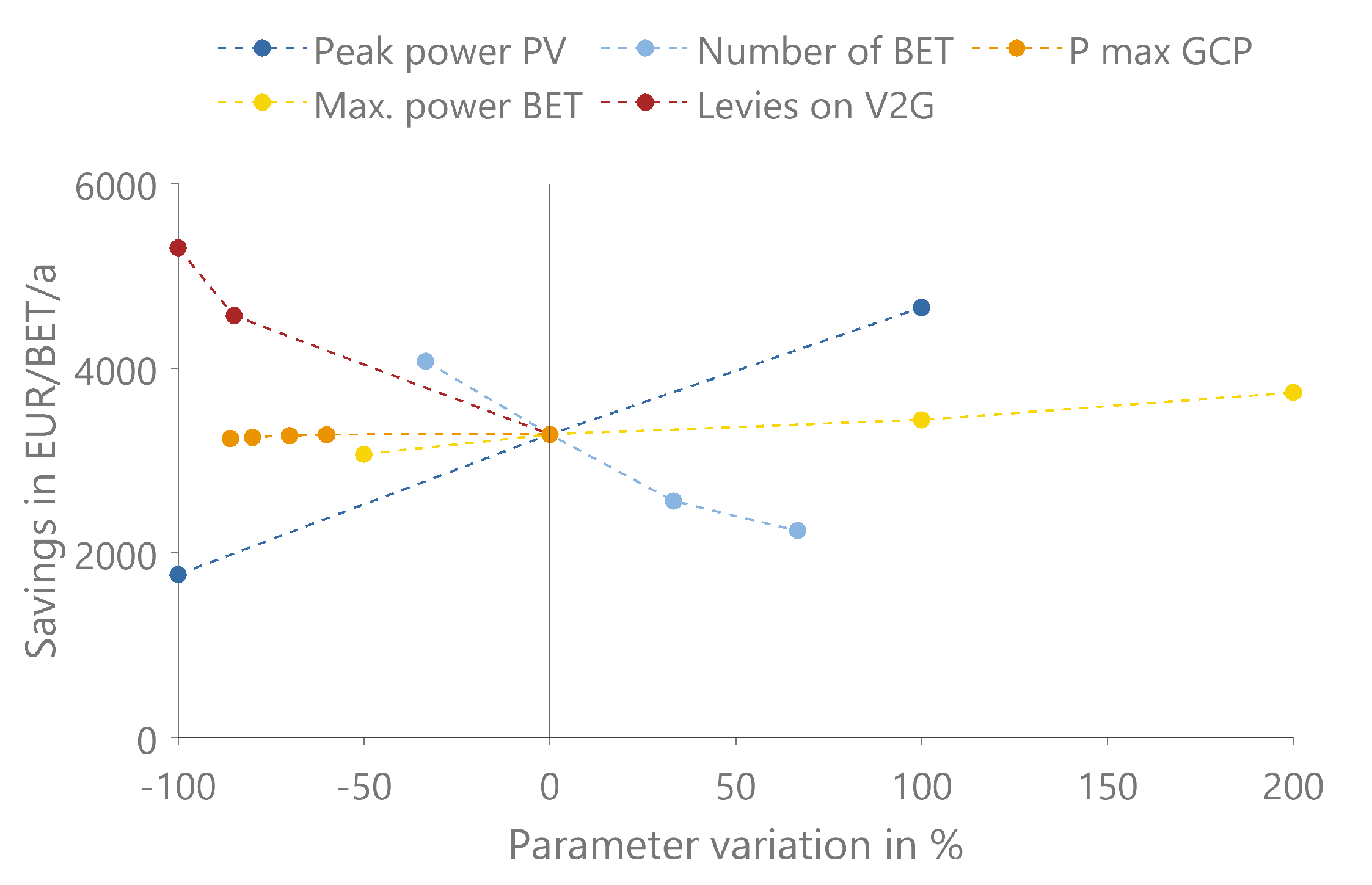
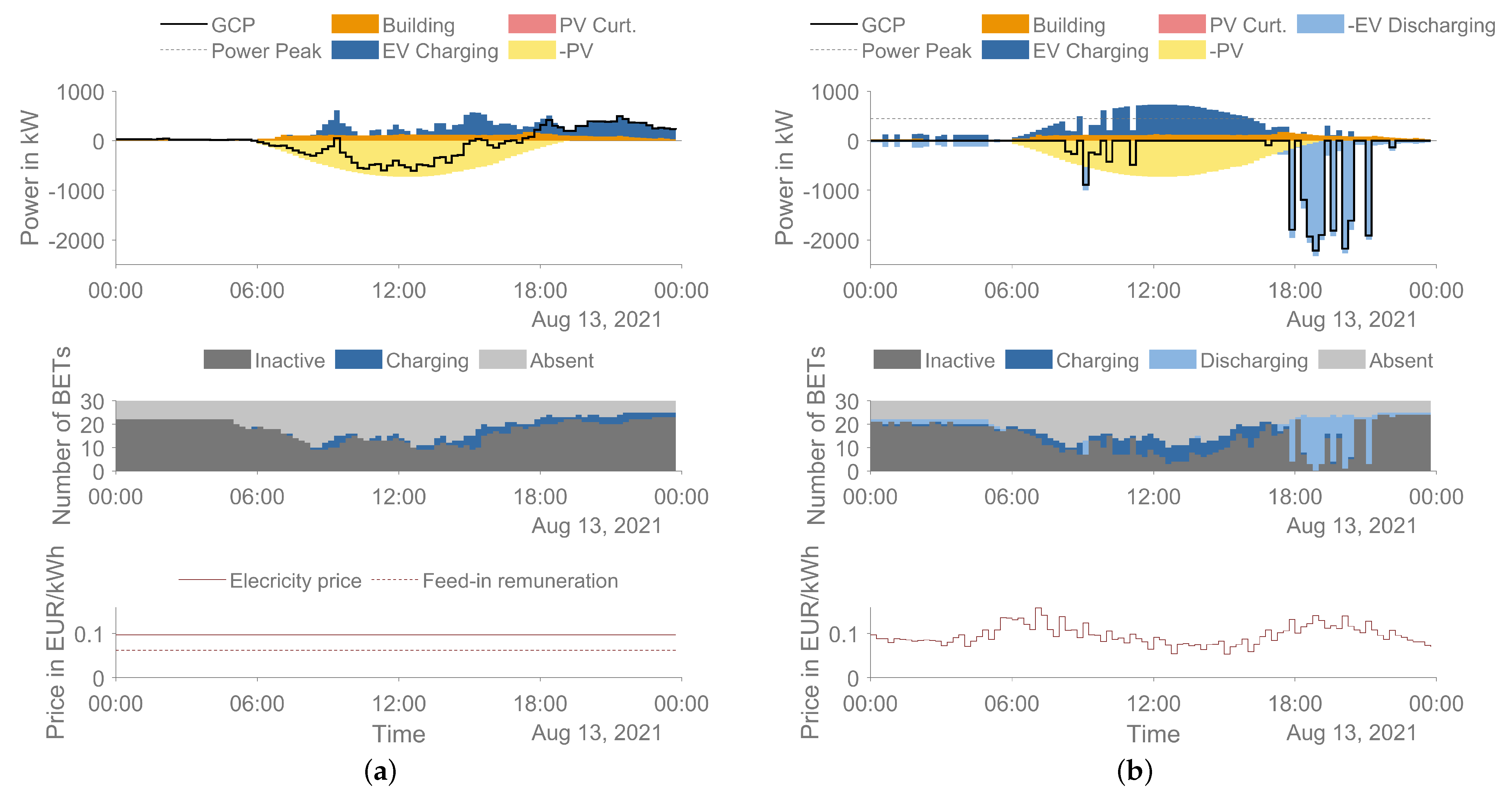
3. Results and Discussion
4. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BET | battery-electric truck |
| bidi | bidirectional |
| CF | cash flow |
| EV | electric vehicle |
| GCP | Grid Connection Point |
| MCS | Megawatt Charging System |
| OEM | Original Equipment Manufacturer |
| PV | photovoltaic |
| ref | reference |
| SOC | State of Charge |
| TCO | total cost of ownership |
| uni | unidirectional |
| V2B | vehicle to building |
| V2G | vehicle to grid |
| V2V | vehicle to vehicle |
References
- Høj, J.; Juhl, L.; Lindegaard, S. V2G—An Economic Gamechanger in E-Mobility? WEVJ 2018, 9, 35. [Google Scholar] [CrossRef]
- Kern, T.; Kigle, S. Modeling and evaluating bidirectionally chargeable electric vehicles in the future European energy system. Energy Rep. 2022, 8, 694–708. [Google Scholar] [CrossRef]
- Nissan Approves First Bi-Directional Charger for Use With Nissan LEAF in the U.S. 2022. Available online: https://usa.nissannews.com/en-US/releases/nissan-approves-first-bi-directional-charger-for-use-with-nissan-leaf-in-the-us (accessed on 17 February 2024).
- CO2 Emissions from Heavy-Duty Vehicles Preliminary CO2 Baseline (Q3–Q4 2019) Estimate. 2022. Available online: https://www.acea.auto/files/ACEA_preliminary_CO2_baseline_heavy-duty_vehicles.pdf (accessed on 17 February 2024).
- New Commercial Vehicle Registrations: Vans +14.6%, Trucks +16.3%, Buses +19.4% in 2023. 2024. Available online: https://www.acea.auto/cv-registrations/new-commercial-vehicle-registrations-vans-14-6-trucks-16-3-buses-19-4-in-2023/ (accessed on 17 February 2024).
- Earl, T.; Mathieu, L.; Cornelis, S.; Kenny, S.; Ambel, C.C.; Nix, J.C. Analysis of long haul battery electric trucks in EU Marketplace and technology, economic, environmental, and policy perspectives. In Proceedings of the 8th Commercial Vehicle Workshop, Graz, Austria, 17–18 May 2018. [Google Scholar]
- Kern, T.; Bukhari, B. Peak Shaving—A cost-benefit analysis for different industries. In Proceedings of the 12. Internationale Energiewirtschaftstagung an der TU Wien, Wien, Austria, 8–10 September 2021. [Google Scholar]
- Cunanan, C.; Tran, M.K.; Lee, Y.; Kwok, S.; Leung, V.; Fowler, M. A Review of Heavy-Duty Vehicle Powertrain Technologies: Diesel Engine Vehicles, Battery Electric Vehicles, and Hydrogen Fuel Cell Electric Vehicles. Clean Technol. 2021, 3, 474–489. [Google Scholar] [CrossRef]
- Nykvist, B.; Olsson, O. The feasibility of heavy battery electric trucks. Joule 2021, 5, 901–913. [Google Scholar] [CrossRef]
- Link, S.; Plötz, P. Technical Feasibility of Heavy-Duty Battery-Electric Trucks for Urban and Regional Delivery in Germany—A Real-World Case Study. WEVJ 2022, 13, 161. [Google Scholar] [CrossRef]
- Liimatainen, H.; van Vliet, O.; Aplyn, D. The potential of electric trucks—An international commodity-level analysis. Appl. Energy 2019, 236, 804–814. [Google Scholar] [CrossRef]
- Zähringer, M.; Wolff, S.; Schneider, J.; Balke, G.; Lienkamp, M. Time vs. Capacity—The Potential of Optimal Charging Stop Strategies for Battery Electric Trucks. Energies 2022, 15, 7137. [Google Scholar] [CrossRef]
- Razi, R.; Hajar, K.; Hably, A.; Mehrasa, M.; Bacha, S.; Labonne, A. Assessment of predictive smart charging for electric trucks: A case study in fast private charging stations. In Proceedings of the 2022 IEEE International Conference on Electrical Sciences and Technologies in Maghreb (CISTEM), Tunis, Tunisia, 26–28 October 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Kern, T.; Dossow, P.; von Roon, S. Integrating Bidirectionally Chargeable Electric Vehicles into the Electricity Markets. Energies 2020, 13, 5812. [Google Scholar] [CrossRef]
- Englberger, S.; Abo Gamra, K.; Tepe, B.; Schreiber, M.; Jossen, A.; Hesse, H. Electric vehicle multi-use: Optimizing multiple value streams using mobile storage systems in a vehicle-to-grid context. Appl. Energy 2021, 304, 117862. [Google Scholar] [CrossRef]
- Roselli, C.; Sasso, M. Integration between electric vehicle charging and PV system to increase self-consumption of an office application. Energy Convers. Manag. 2016, 130, 130–140. [Google Scholar] [CrossRef]
- Biedenbach, F.; Valerie, Z. Opportunity or Risk? Model-Based Optimization of Electric Vehicle Charging Costs for Different Types of Variable Tariffs and Regulatory Scenarios from a Consumer Perspective. In Proceedings of the CIRED Porto Workshop 2022: E-mobility and Power Distribution Systems, Porto, Portugal, 2–3 June 2022. [Google Scholar] [CrossRef]
- Battke, B.; Schmidt, T.S. Cost-efficient demand-pull policies for multi-purpose technologies—The case of stationary electricity storage. Appl. Energy 2015, 155, 334–348. [Google Scholar] [CrossRef]
- Parra, D.; Patel, M.K. The nature of combining energy storage applications for residential battery technology. Appl. Energy 2019, 239, 1343–1355. [Google Scholar] [CrossRef]
- Jahic, A.; Eskander, M.; Schulz, D. Charging Schedule for Load Peak Minimization on Large-Scale Electric Bus Depots. Appl. Sci. 2019, 9, 1748. [Google Scholar] [CrossRef]
- Duan, M.; Liao, F.; Qi, G.; Guan, W. Integrated optimization of electric bus scheduling and charging planning incorporating flexible charging and timetable shifting strategies. Transp. Res. Part C Emerg. Technol. 2023, 152, 104175. [Google Scholar] [CrossRef]
- Verbrugge, B.; Rauf, A.M.; Rasool, H.; Abdel-Monem, M.; Geury, T.; El Baghdadi, M.; Hegazy, O. Real-Time Charging Scheduling and Optimization of Electric Buses in a Depot. Energies 2022, 15, 23. [Google Scholar] [CrossRef]
- Houbbadi, A.; Trigui, R.; Pelissier, S.; Bouton, T.; Redondo-Iglesias, E. Multi-Objective Optimisation of the Management of Electric Bus Fleet Charging. In Proceedings of the 2017 IEEE Vehicle Power and Propulsion Conference (VPPC), Belfort, France, 11–14 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Raab, A.F.; Lauth, E.; Strunz, K.; Göhlich, D. Implementation Schemes for Electric Bus Fleets at Depots with Optimized Energy Procurements in Virtual Power Plant Operations. World Electr. Veh. J. 2019, 10, 5. [Google Scholar] [CrossRef]
- Biedenbach, F.; Blume, Y. Size matters: Multi-use Optimization of a Depot for Battery Electric Heavy-Duty Trucks. In Proceedings of the EVS36, Sacramento, CA, USA, 11–14 June 2023. [Google Scholar]
- Kern, T.; Dossow, P.; Morlock, E. Revenue opportunities by integrating combined vehicle-to-home and vehicle-to-grid applications in smart homes. Appl. Energy 2022, 307, 118187. [Google Scholar] [CrossRef]
- Ploskas, N.; Samaras, N. Linear Programming Using MATLAB, 1st ed.; Springer International Publishing AG: Cham, Switzerland, 2017. [Google Scholar]
- Preis, V.; Biedenbach, F. Assessing the incorporation of battery degradation in vehicle-to-grid optimization models. Energy Inform. 2023, 6, 33. [Google Scholar] [CrossRef]
- Balke, G.; Adenaw, L. Heavy commercial vehicles’ mobility: Dataset of trucks’ anonymized recorded driving and operation (DT-CARGO). Data in Brief. 2023, 48, 109246. [Google Scholar] [CrossRef]
- Borlaug, B.; Moniot, M.; Birky, A.; Alexander, M.; Muratori, M. Charging needs for electric semi-trailer trucks. Renew. Sustain. Energy Transit. 2022, 2, 100038. [Google Scholar] [CrossRef]
- Sripad, S.; Viswanathan, V. Performance Metrics Required of Next-Generation Batteries to Make a Practical Electric Semi Truck. ACS Energy Lett. 2017, 2, 1669–1673. [Google Scholar] [CrossRef]
- Schroedter-Homscheidt, M.; Hoyer-Klick, C.; Killius, N.; Lefèvre, M.; Wald, L.; Wey, E.; Saboret, L. User’s Guide to the CAMS Radiation Service—Status December 2017; ECMWF: Reading, UK, 2017. [Google Scholar]
- Guminski, A.; Fiedler, C.; Kigle, S.; Pellinger, C.; Dossow, P.; Ganz, K.; Jetter, F.; Kern, T.; Limmer, T.; Murmann, A.; et al. eXtremOS Summary Report; Forschungsstelle für Energiewirtschaft e. V.: Munich, Germany, 2021. [Google Scholar] [CrossRef]
- Veronika Henze. Lithium-Ion Battery Pack Prices Rise for First Time to an Average of $151/kWh. 2022. Available online: https://about.bnef.com/blog/lithium-ion-battery-pack-prices-rise-for-first-time-to-an-average-of-151-kwh/ (accessed on 17 February 2024).
- EPEX-Spot SE. Market Data of EPEX-Spot SE; EPEX-Spot SE: Paris, France, 2023. [Google Scholar]
- BDEW. BDEW Electricity Price Analysis Beginning of 2023. 2023. Available online: https://www.bdew.de/service/daten-und-grafiken/bdew-strompreisanalyse/ (accessed on 17 February 2024).
- Netze BW GmbH. Prices for the Use of the Electricity Distribution Grid of Netze BW GmbH; Netze BW GmbH: Stuttgart, Germany, 2023. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Local Transport | Regional Transport |
|---|---|---|
| Daily kilometrage (Weekdays/Weekends) | 53.8 km/0.75 km | 250 km/4.2 km |
| Percentage at depot (Weekdays/Weekends) | 78.20%/95.19% | 37.80%/63.40% |
| Annual kilometrage | 14.382 km | 65.750 km |
| Average consumption per km | 1.1 kWh/km | 1.26 kWh/km |
| Annual energy consumption | 14.9 MWh | 83.4 MWh |
| Category | Parameter | Symbol | Unit | Value | Sensitivities |
|---|---|---|---|---|---|
| General | Year | 2021 | 2019, 2020, 2022 | ||
| Time step size | t | h | 0.25 | ||
| Optimization period | h | 168 | |||
| Overlapping period | h | 24 | |||
| GCP | Levies on V2G | EUR/kWh | 0.02, 0 | ||
| Price for public charging | EUR/kWh | 0.50 | |||
| Max. grid connection capacity | MW | 5 | 0.7, 1, 1.5, 2 | ||
| Feed-in remuneration PV (ref) | EUR/kWh | 0.06 | |||
| BETs | Number of vehicles | 30 | 20, 40, 50 | ||
| Efficiency of charging | 0.926 | ||||
| Efficiency of discharging | 0.921 | ||||
| Capacity of vehicle battery | kWh | 250/500 | |||
| Minimum SOC at departure | 1 | ||||
| Maximum charging/ discharging power | kW | 100 | 50, 200, 300 | ||
| Price of battery | EUR/kWh | 139 | |||
| PV system | Peak power | kW | 1000 | 0, 2000 | |
| Azimuth angle | ° | 0 | |||
| Tilt angle | ° | 35 |
| Year | (EUR/kWh) | (EUR/kWh) | (EUR/kWh) | (EUR/kW) |
|---|---|---|---|---|
| 2019 | 0.038 | 0.131 | 0.047 | 16.37 |
| 2020 | 0.030 | 0.135 | 0.052 | 18.36 |
| 2021 | 0.097 | 0.133 | 0.054 | 18.65 |
| 2022 | 0.245 | 0.495 | 0.056 | 19.20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Biedenbach, F.; Strunz, K. Multi-Use Optimization of a Depot for Battery-Electric Heavy-Duty Trucks. World Electr. Veh. J. 2024, 15, 84. https://doi.org/10.3390/wevj15030084
Biedenbach F, Strunz K. Multi-Use Optimization of a Depot for Battery-Electric Heavy-Duty Trucks. World Electric Vehicle Journal. 2024; 15(3):84. https://doi.org/10.3390/wevj15030084
Chicago/Turabian StyleBiedenbach, Florian, and Kai Strunz. 2024. "Multi-Use Optimization of a Depot for Battery-Electric Heavy-Duty Trucks" World Electric Vehicle Journal 15, no. 3: 84. https://doi.org/10.3390/wevj15030084
APA StyleBiedenbach, F., & Strunz, K. (2024). Multi-Use Optimization of a Depot for Battery-Electric Heavy-Duty Trucks. World Electric Vehicle Journal, 15(3), 84. https://doi.org/10.3390/wevj15030084