
Integrated Path Following and Lateral Stability Control of Distributed Drive Autonomous Unmanned Vehicle



Abstract
1. Introduction
- (1)
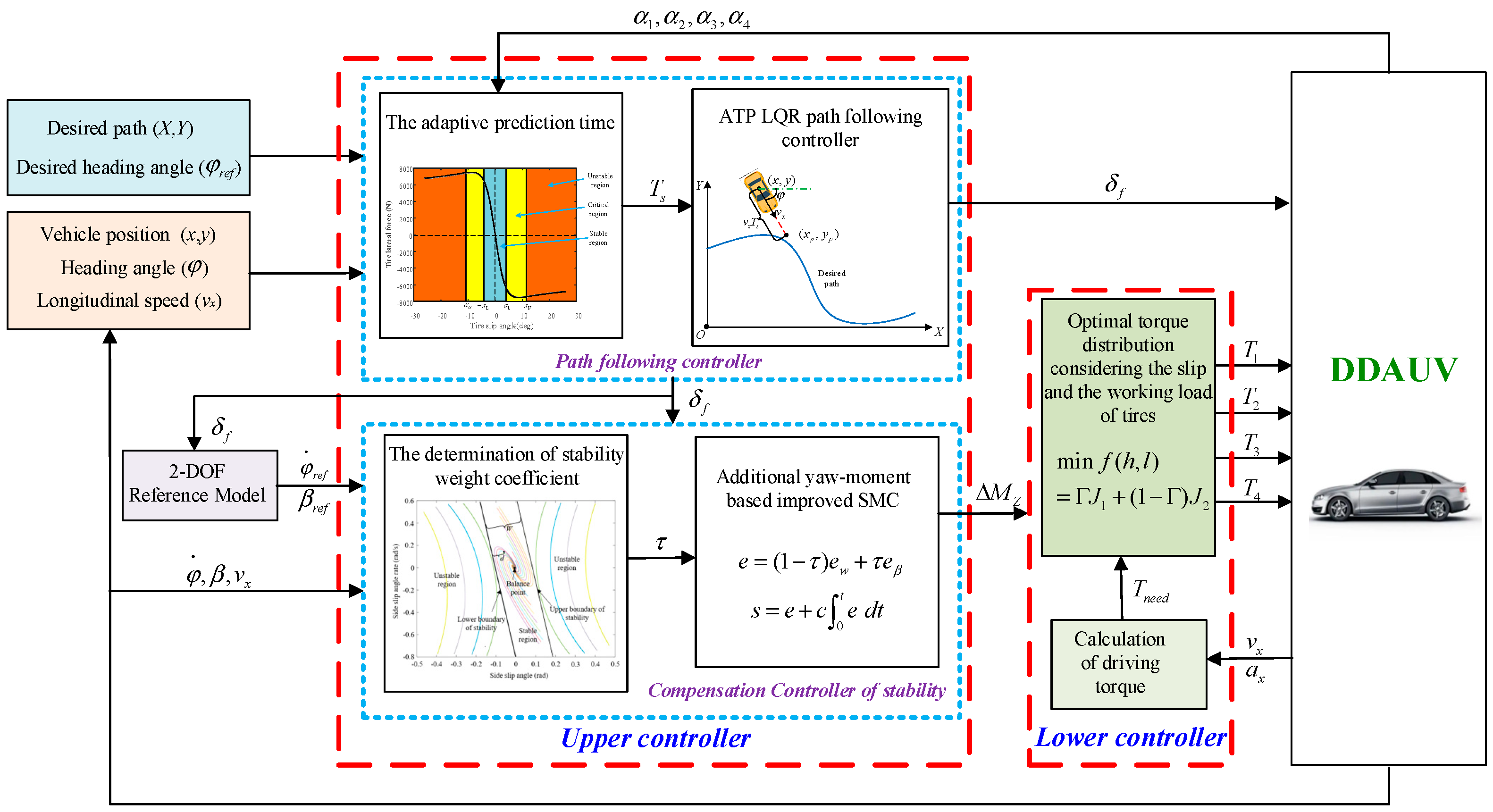
- The traditional LQR algorithm can solve the steady-state error problem of steering trajectory tracking by feedforward control, but it does not encompass roll optimization, and the control sequence within the control step can not be solved according to the predicted state deviation sequence, which makes the vehicle steering become radical. To solve this problem, this paper adds an adaptive prediction module based on LQR (Linear Quadratic Regulator) trajectory tracking control and judges the steering steady state according to the dynamic characteristics of the tire, so as to adjust the prediction time to make the steering more stable;
- (2)
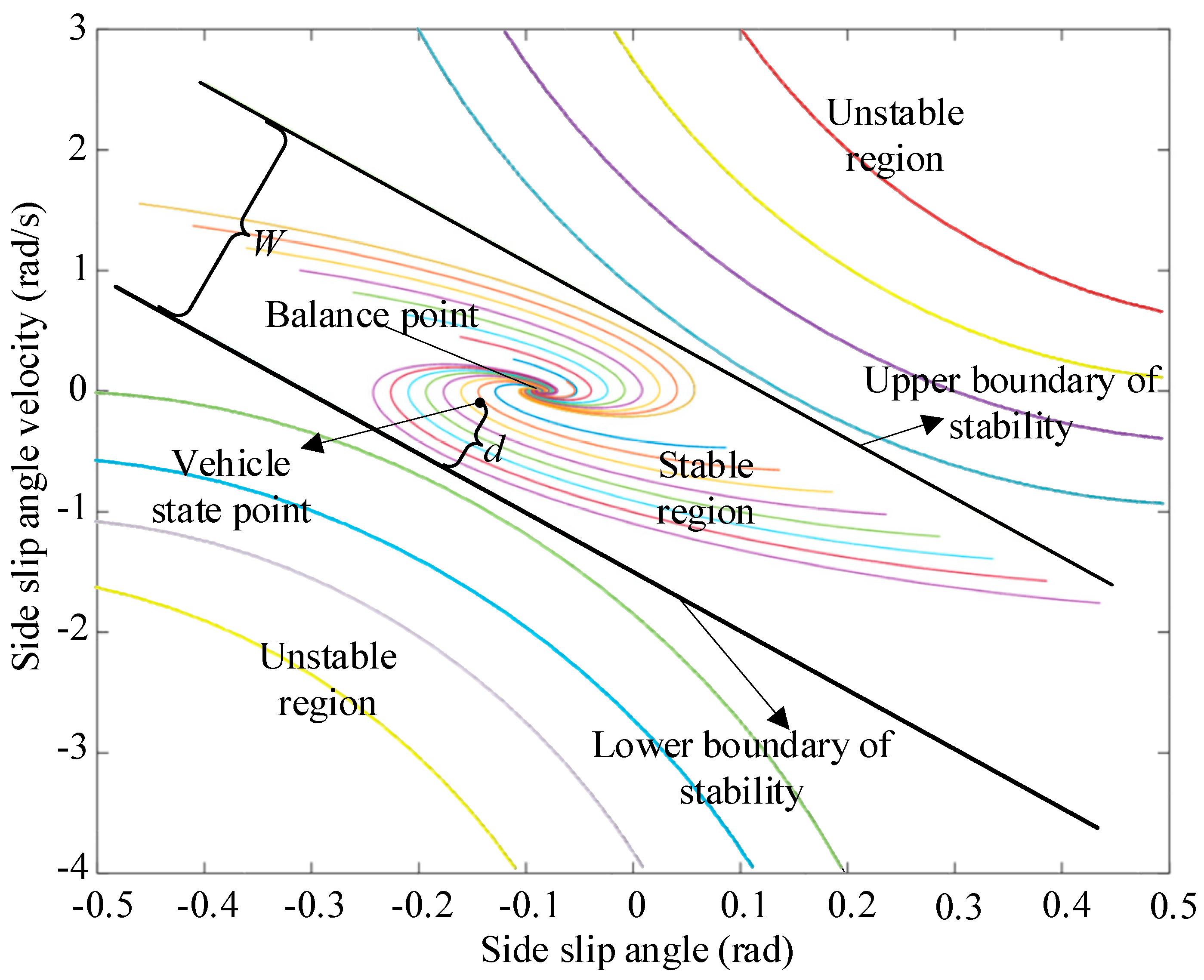
- A stability compensation controller is designed by the additional yaw moment calculated by an improved SMC controller. The phase plane diagram of the sideslip angle and the sideslip angular velocity are used to judge the current stability state of the vehicle, so as to adaptively adjust the weight ratio of the sliding mode surface in the sliding mode control to coordinate the path following and lateral stability of the DDAUV;
- (3)
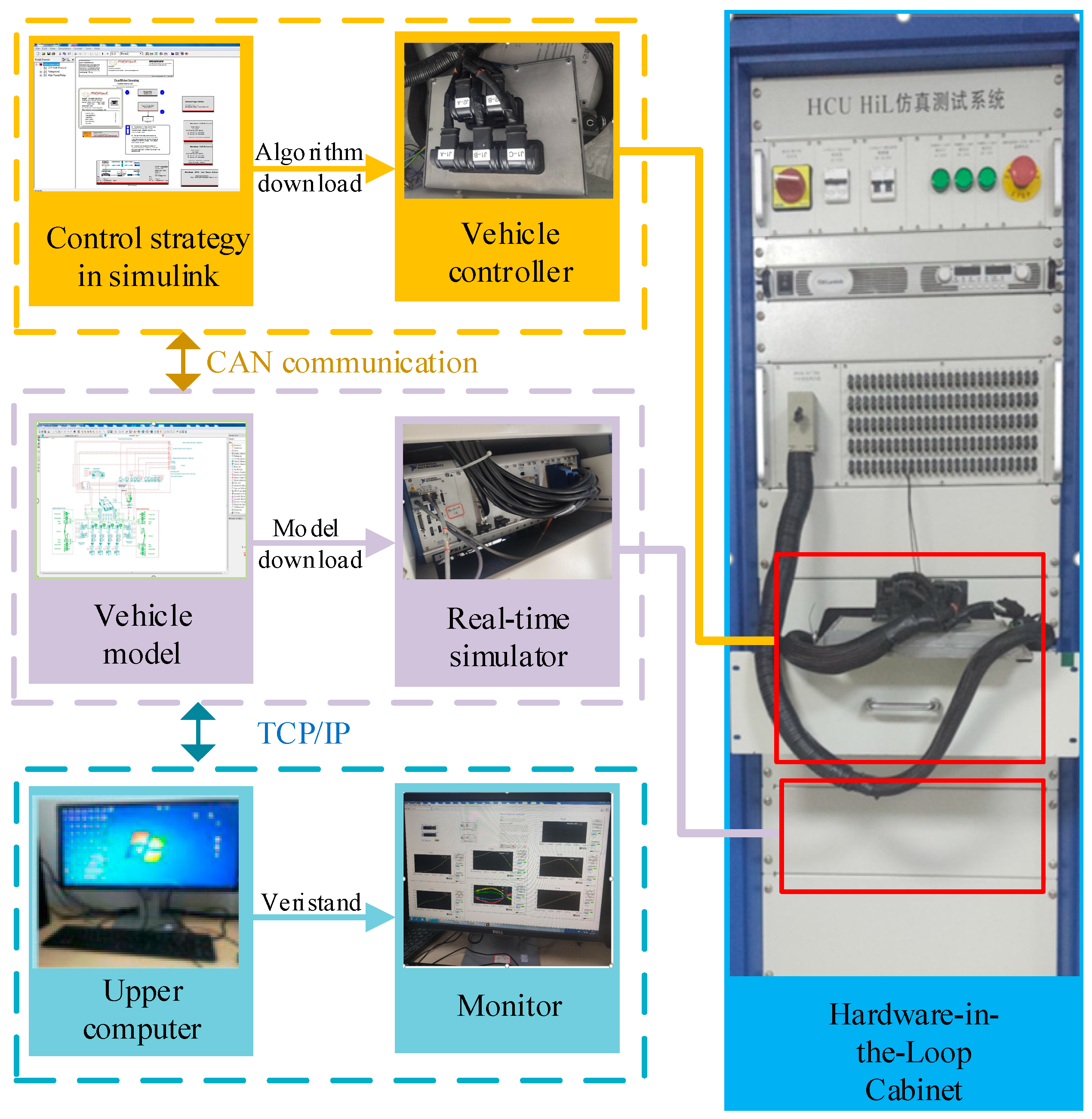
- Considering the slip and the working load of four tires, a comprehensive cost function is established and solved by the Karush–Kuhn–Tuckert (KKT) condition to allocate torque for IWMs. Moreover, the proposed algorithm is verified by the hardware-in-the-loop (HIL) experiments.
2. The Algorithm Framework and Model
2.1. Algorithm Framework
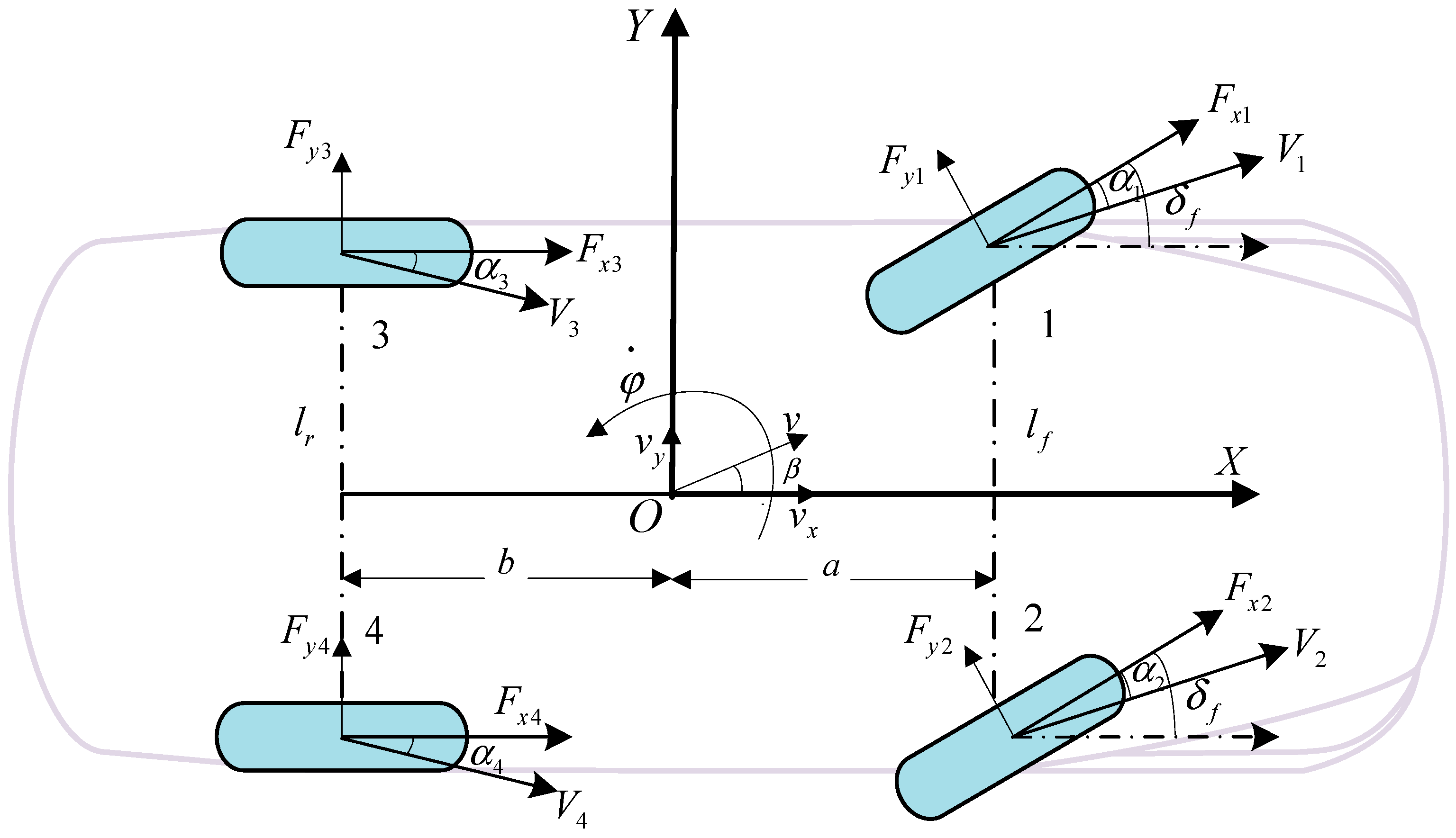
2.2. Vehicle Dynamic Model
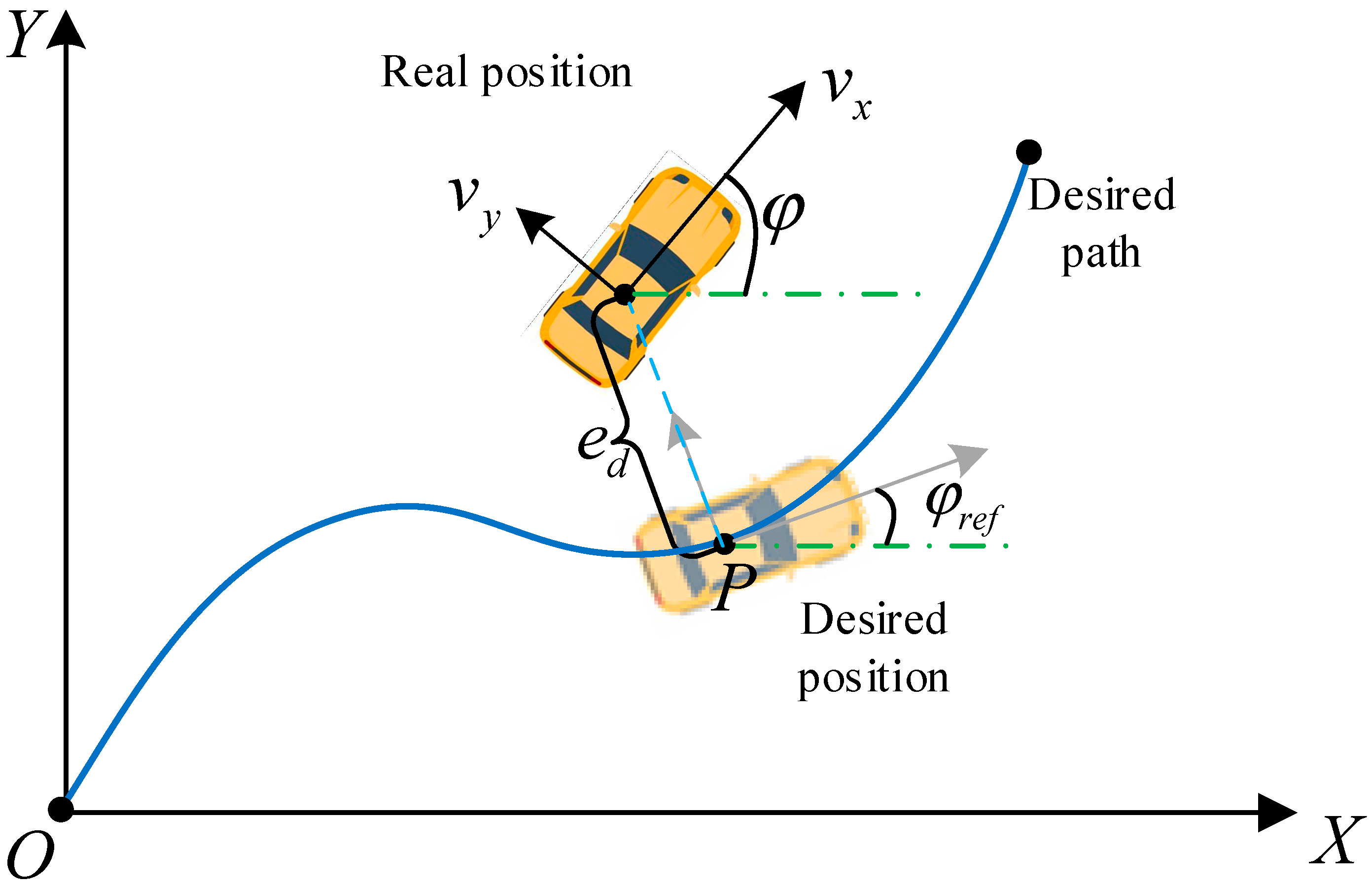
2.3. Path Following Model
3. Design of Autonomous Steering Controller Based on the APT LQR
3.1. Design of LQR Path Following Controller
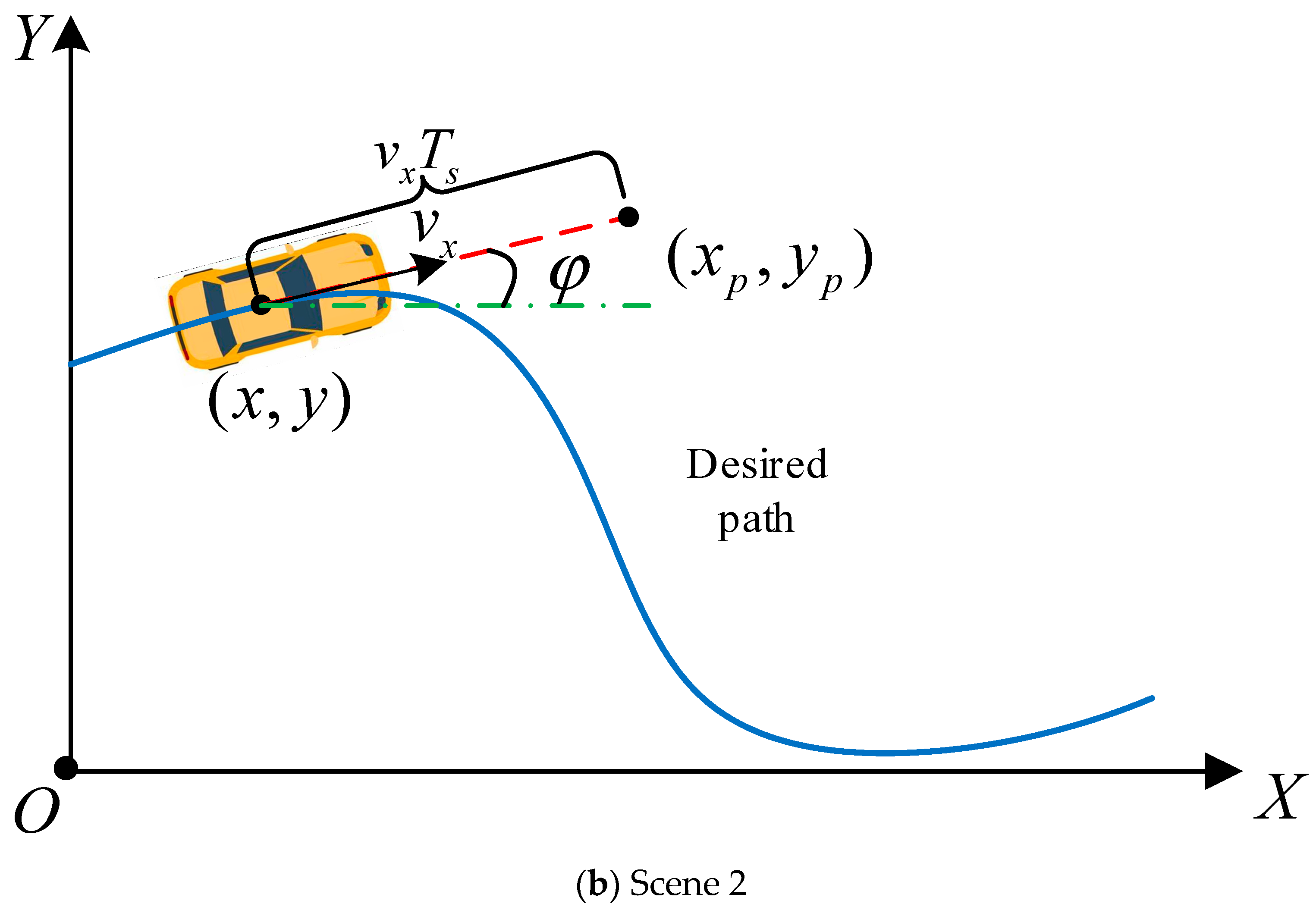
3.2. LQR Path Following Controller with Adaptive Prediction Time
4. Design of Stability Compensation Controller for Autonomous Steering
4.1. Description of Stability Compensation Controller
4.2. The Adaptive Adjustment of Stability Weight Coefficient
4.3. Design of Torque Distribution Controller
5. HIL Experiment Results and Analysis
5.1. DLC Manoeuvre on Low Adhesion Road
5.2. DLC Maneuver on Joint Road
6. Conclusions
- (1)
- Considering the great influence of driving torque on the loss energy from tire slip and the working efficiency of IWMs, future research will focus on the integrated control of stability and energy saving through torque vectoring control;
- (2)
- In this paper, the fixed speed condition is used in the HIL test, but the speed of the unmanned vehicle changes in the trajectory planned by the decision planning layer, and the speed has a certain influence on the vehicle trajectory tracking and lateral stability. Therefore, the influence of time-varying vehicle speed on its control performance should be considered when designing control strategies in the future.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, T.; Chen, L.; Xu, X.; Cai, Y.; Jiang, H.; Sun, X. Passive fault-tolerant path following control of autonomous distributed drive electric vehicle considering steering system fault. Mech. Syst. Signal Process. 2019, 123, 298–315. [Google Scholar] [CrossRef]
- Zhao, B.; Xu, N.; Chen, H.; Guo, K.; Huang, Y. Stability control of electric vehicles with in-wheel motors by considering tire slip energy. Mech. Syst. Signal Process. 2019, 118, 340–359. [Google Scholar] [CrossRef]
- Yao, X.; Gu, X.; Jiang, P. Coordination control of active front steering and direct yaw moment control based on stability judgment for AVs stability enhancement. Proc. IMechE Part D J. Automob. Eng. 2021, 236, 59–74. [Google Scholar] [CrossRef]
- Li, C.; Jiang, H.; Wang, C.; Ma, S. Estimation method of vehicle position and attitude based on sensor information fusion. J. Jiangsu Univ. (Nat. Sci. Ed.) 2022, 43, 636–644. [Google Scholar]
- Li, S.; Feng, Q. Control strategy of adaptive cruise system for electric vehicle driven by hub motor. J. Jiangsu Univ. (Nat. Sci. Ed.) 2023, 44, 125–132. [Google Scholar]
- Zhao, W.; Zhang, H.; Li, Y. Displacement and force coupling control design for automotive active front steering system. Mech. Syst. Signal Process. 2018, 106, 76–93. [Google Scholar] [CrossRef]
- Liu, C.; Sun, W.; Zhang, J. Adaptive sliding mode control for 4-wheel SBW system with ackerman geometry. ISA Trans. 2020, 96, 103–115. [Google Scholar] [CrossRef]
- Falcone, P.; Eric, H.; Borrelli, F.; Asgari, J.; Hrovat, D. MPC-based yaw and lateral stabilization via active front ste ering and braking. Veh. Syst. Dyn. 2008, 46, 611–628. [Google Scholar] [CrossRef]
- Li, Z.; Wang, P.; Liu, H.; Hu, Y.; Chen, H. Coordinated longitudinal and lateral vehicle stability control based on the combined-slip tire model in the MPC framework. Veh. Syst. Dyn. 2021, 161, 107947. [Google Scholar]
- Li, B.; Du, H.; Li, W. Fault-tolerant control of electric vehicles with in-wheel motors using actuator-grouping sliding mode controllers. Mech. Syst. Signal Process. 2016, 72, 462–485. [Google Scholar] [CrossRef]
- Chen, Y.; Li, Z.; Kong, H.; Ke, F. Model predictive tracking control of nonholonomic mobile robots with coupled input constraints and unknown dynamics. IEEE Trans. Ind. Inform. 2018, 15, 3196–3205. [Google Scholar] [CrossRef]
- Sun, C.; Zhang, X.; Zhou, Q.; Tian, Y. A model predictive controller with switched tracking error for autonomous vehicle path tracking. IEEE Access 2019, 7, 53103–53114. [Google Scholar] [CrossRef]
- Hu, C.; Wang, R.; Yan, F.; Chen, N. Output constraint control on path following of four-wheel independently actuated autonomous ground vehicles. IEEE Trans. Veh. Technol. 2015, 65, 4033–4043. [Google Scholar] [CrossRef]
- Lee, K.; Jeon, S.; Kim, H.; Kum, D. Optimal path tracking control of autonomous vehicle: Adaptive full-state linear quadratic gaussian (LQG) control. IEEE Access 2019, 7, 109120–109133. [Google Scholar] [CrossRef]
- Tavan, N.; Tavan, M.; Hosseini, R. An optimal integrated longitudinal and lateral dynamic controller development for vehicle path tracking. Lat. Am. J. Solids Struct. 2015, 12, 1006–1023. [Google Scholar] [CrossRef]
- Vivek, K.; Sheta, M.; Gumtapure, V. A comparative study of Stanley, LQR and MPC controllers for path tracking application. IEEE Int. Conf. Intell. Syst. Green Technol. (ICISGT) 2019, 13, 667–674. [Google Scholar]
- Yakub, F.; Yakub, Y. Comparative study of autonomous path-following vehicle control via model predictive control and linear quadratic control. Proc. Inst. Mech. Eng. 2015, 229, 1695–1714. [Google Scholar] [CrossRef]
- Deng, H.; Zhao, Y.; Feng, S.; Wang, Q.; Zhang, C.; Lin, F. Torque vectoring algorithm based on mechanical elastic electric wheels with consideration of the stability and economy. Energy 2021, 219, 119643. [Google Scholar] [CrossRef]
- Ardashir, M.; Hamid, T. A novel adaptive control approach for path tracking control of autonomous vehicles subject to uncertain dynamics. Proc IMechE Part D J. Automob. Eng. 2020, 234, 2115–2126. [Google Scholar]
- Guo, J.; Luo, Y.; Li, K. An adaptive hierarchical trajectory following control approach of autonomous four-wheel independent drive electric vehicles. IEEE Trans. Intell. Transp. Syst. 2017, 19, 2482–2492. [Google Scholar] [CrossRef]
- Chen, T.; Xu, X.; Chen, L.; Jiang, H.; Cai, Y.; Li, Y. Estimation of longitudinal force, lateral vehicle speed and yaw rate for four-wheel independent driven electric vehicles. Mech. Syst. Signal Process. 2018, 101, 377–388. [Google Scholar] [CrossRef]
- Ma, X.; Wong, P.; Zhao, J.; Xie, Z. Cornering stability control for vehicles with active front steering system using TS fuzzy based sliding mode control strategy. Mech. Syst. Signal Process. 2019, 125, 347–364. [Google Scholar] [CrossRef]
- Xie, J.; Xu, X.; Wang, F.; Tang, Z.; Chen, L. Coordinated control based on path following of distributed drive autonomous electric vehicles with yaw-moment control. Control Eng. Pract. 2021, 106, 104659. [Google Scholar] [CrossRef]
- Ren, B.; Chen, H.; Zhao, H.; Yuan, L. MPC-based yaw stability control in in-wheel-motored EV via active front steering and motor torque distribution. Mechatronics 2016, 38, 103–114. [Google Scholar] [CrossRef]
- Wang, H.; Cui, W.; Shu, L.; Tan, D. Stability control of in-wheel motor drive vehicle with motor fault. Part D J. Automob. Eng. 2018, 233, 3147–3164. [Google Scholar] [CrossRef]
- Park, G.; Han, K.; Nam, K.; Kim, H.; Choi, S. Torque vectoring algorithm of electronic-four-wheel drive vehicles for enhancement of cornering performance. IEEE Trans. Veh. Technol. 2020, 69, 3668–3679. [Google Scholar] [CrossRef]
- Feng, J.; Zhang, P.; Wang, W.; Qi, Q.; Song, B. Direct yaw moment control and realization mode of handling stability for high-clearance sprayer. J. Jiangsu Univ. (Nat. Sci. Ed.) 2022, 43, 657–665. [Google Scholar]
- Han, Z.; Xu, N.; Chen, H.; Huang, Y.; Zhao, B. Energy-efficient control of electric vehicles based on linear quadratic regulator and phase plane analysis. Appl. Energy 2018, 213, 639–657. [Google Scholar] [CrossRef]
- Li, S.; Sun, X. Active obstacle avoidance path planning based on improved artificial potential field method in front vehicle cut-in scenario. J. Jiangsu Univ. (Nat. Sci. Ed.) 2023, 44, 7–13. [Google Scholar]
- Guo, P.; Yu, L. Trajectory tracking control of driverless vehicle based on road adaptive model predictive control. J. Jiangsu Univ. (Nat. Sci. Ed.) 2022, 44, 270–275. [Google Scholar]
- Yuan, C.; Wang, J.; He, Y.; Shen, J.; Chen, L.; Weng, S. Active obstacle avoidance control of intelligent vehicle based on pothole detection. J. Jiangsu Univ. (Nat. Sci. Ed.) 2022, 43, 504–511. [Google Scholar]
- Joa, E.; Park, K.; Koh, Y.; Yi, K.; Kim, K. A tyre slip-based integrated chassis control of front/rear traction distribution and four-wheel independent brake from moderate driving to limit handling. Veh. Syst. Dyn. 2018, 56, 579–603. [Google Scholar] [CrossRef]
- Peng, H.; Wang, W.; Xiang, C.; Li, L.; Wang, X. Torque coordinated control of four in-wheel motors independent-drive vehicles with consideration of the safety and economy. IEEE Trans. Veh. Technol. 2019, 68, 9604–9618. [Google Scholar] [CrossRef]
- Nahidi, A.; Kasaiezadeh, A.; Khosravani, S.; Khajepour, A.; Chen, S.; Litkouhi, B. Modular integrated longitudinal and lateral vehicle stability control for electric vehicles. Mechatronics 2017, 44, 60–70. [Google Scholar] [CrossRef]
- Yang, M.; Li, S.; Li, Z.; Feng, B.; Li, J. Active disturbance rejection controller of direct torque for permanent magnet synchronous motor based on super-twisting sliding mode. J. Jiangsu Univ. (Nat. Sci. Ed.) 2022, 43, 680–684. [Google Scholar]
- Ren, Y.; Zheng, L.; Khajepour, A. Integrated model predictive and torque vectoring control for path tracking of 4-wheel-driven autonomous vehicles. IET Intell. Transp. Syst. 2019, 13, 98–107. [Google Scholar] [CrossRef]
- Ma, Y.; Chen, J.; Zhu, X.; Xu, Y. Lateral stability integrated with energy efficiency control for electric vehicles. Mech. Syst. Signal Process. 2019, 127, 1–15. [Google Scholar] [CrossRef]
- Fu, X.; Zhao, X.; Liu, D. Driving force control of wheel motor drive skid steer vehicle. J. Jiangsu Univ. (Nat. Sci. Ed.) 2022, 44, 254–261. [Google Scholar]
- Zhang, X.; Göhlich, D.; Zheng, W. Karush–kuhn–tuckert based global optimization algorithm design for solving stability torque allocation of distributed drive electric vehicles. J. Frankl. Inst. 2017, 354, 8134–8155. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter (Symbol) | Value (Unit) | Parameter Name (Symbol) |
|---|---|---|
| Equipment quality (m) | 1270 (kg) | Wheel radius (R) |
| Rolling resistance coefficient (f) | 0.0185 | Distance mass center to front wheels (a) |
| Distance mass center to rear wheels (b) | 1.895 (m) | Height of the center (h) |
| Front wheel base (lf) | 1.9 (m) | Rear wheel base (lr) |
| Lateral stiffness of front wheels (Cαf) | −72,485 (N/rad) | Lateral stiffness of rear wheels (Cαr) |
| Rotational inertia (Iz) | 1970 (kgm2) | Mass conversion factor (δc) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, F.; An, J.; Chen, Q.; Li, Y. Integrated Path Following and Lateral Stability Control of Distributed Drive Autonomous Unmanned Vehicle. World Electr. Veh. J. 2024, 15, 122. https://doi.org/10.3390/wevj15030122
Zhao F, An J, Chen Q, Li Y. Integrated Path Following and Lateral Stability Control of Distributed Drive Autonomous Unmanned Vehicle. World Electric Vehicle Journal. 2024; 15(3):122. https://doi.org/10.3390/wevj15030122
Chicago/Turabian StyleZhao, Feng, Jiexin An, Qiang Chen, and Yong Li. 2024. "Integrated Path Following and Lateral Stability Control of Distributed Drive Autonomous Unmanned Vehicle" World Electric Vehicle Journal 15, no. 3: 122. https://doi.org/10.3390/wevj15030122
APA StyleZhao, F., An, J., Chen, Q., & Li, Y. (2024). Integrated Path Following and Lateral Stability Control of Distributed Drive Autonomous Unmanned Vehicle. World Electric Vehicle Journal, 15(3), 122. https://doi.org/10.3390/wevj15030122