
Data Acquisition and Performance Analysis during Real-Time Driving of a Two-Wheeler Electric Vehicle—A Case Study

Abstract
1. Introduction
2. Methodology
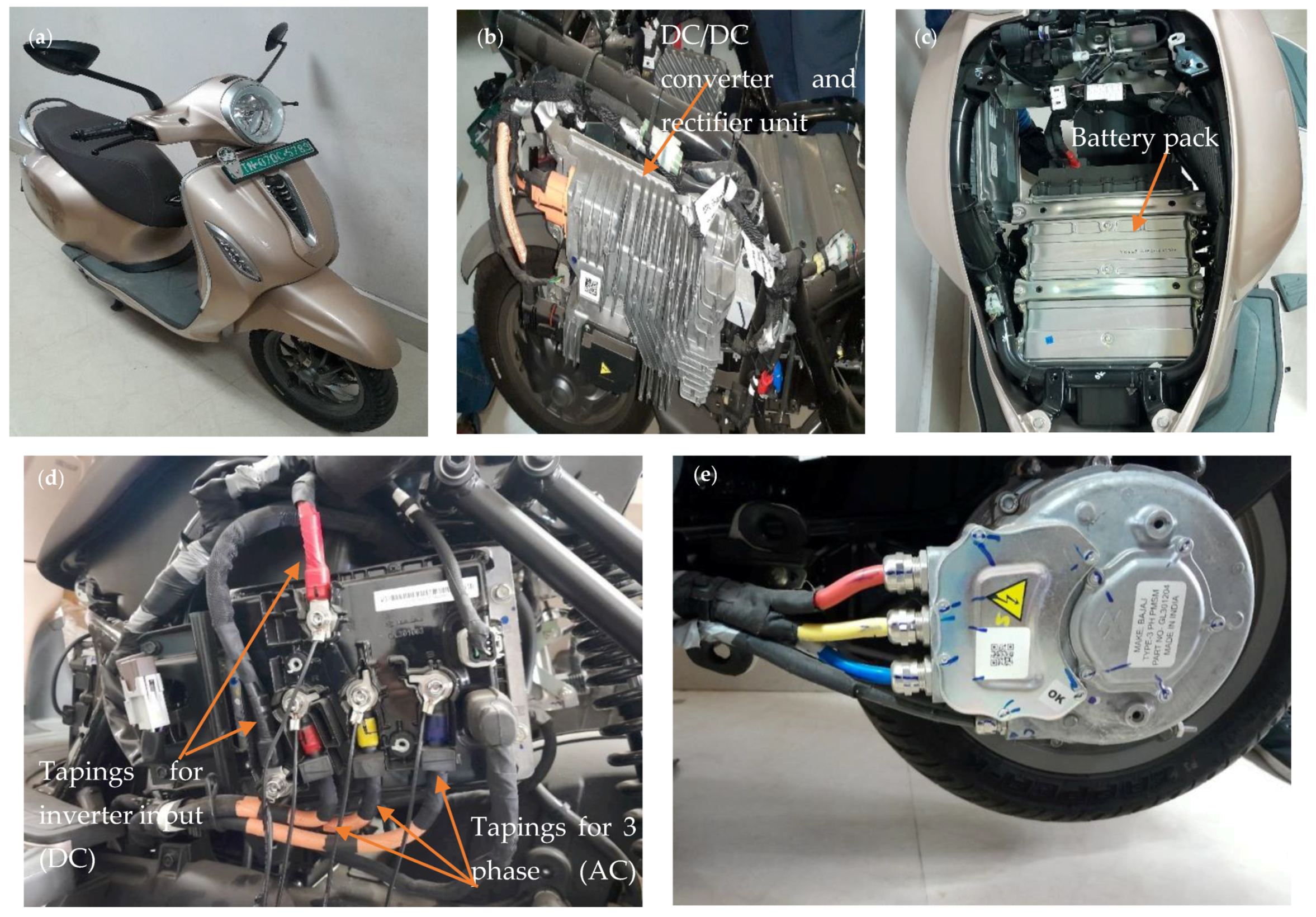
2.1. Specifications of the Electric Vehicle
2.2. Data Acquisition System (DEWE3-A4)
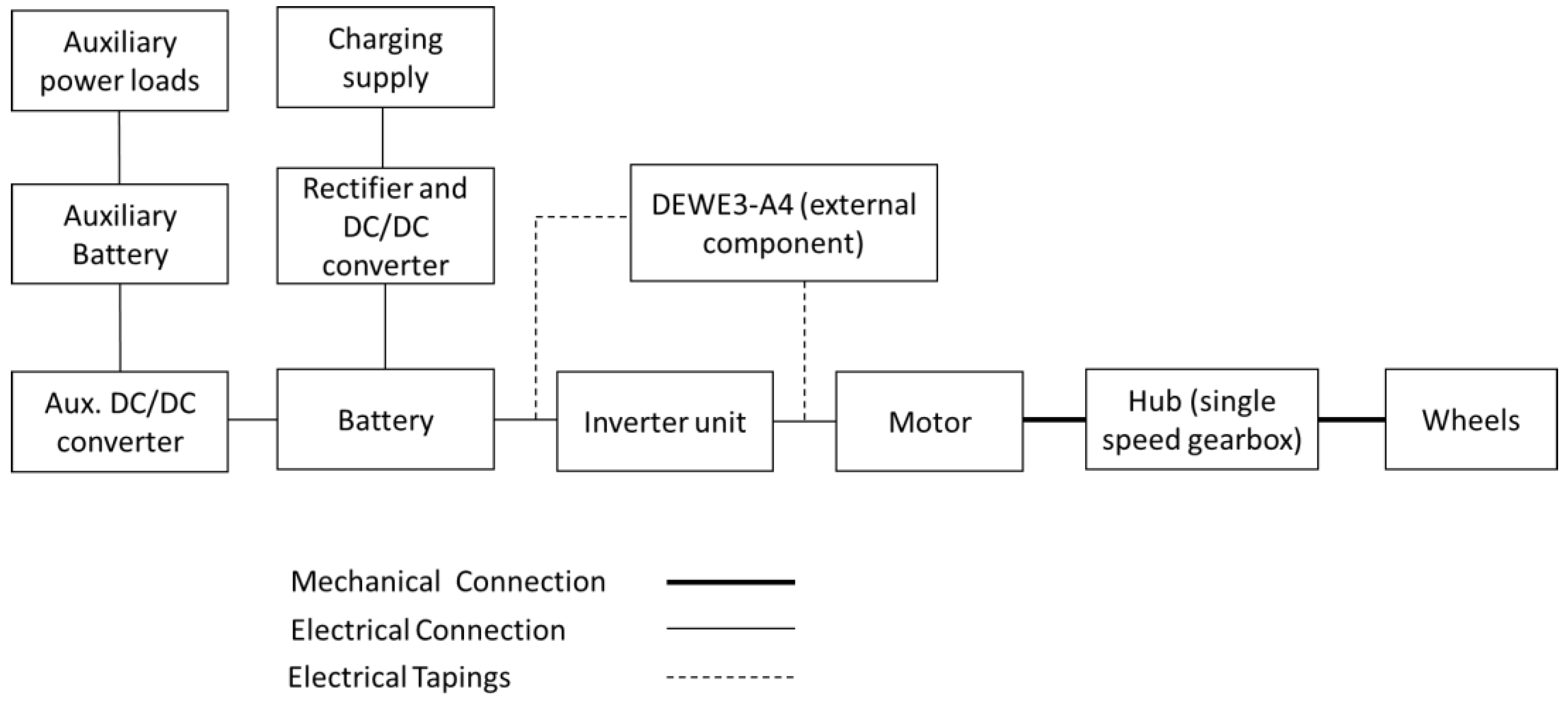
2.3. Block Diagram of the Vehicle Architecture
2.4. Measured and Calculated Quantities
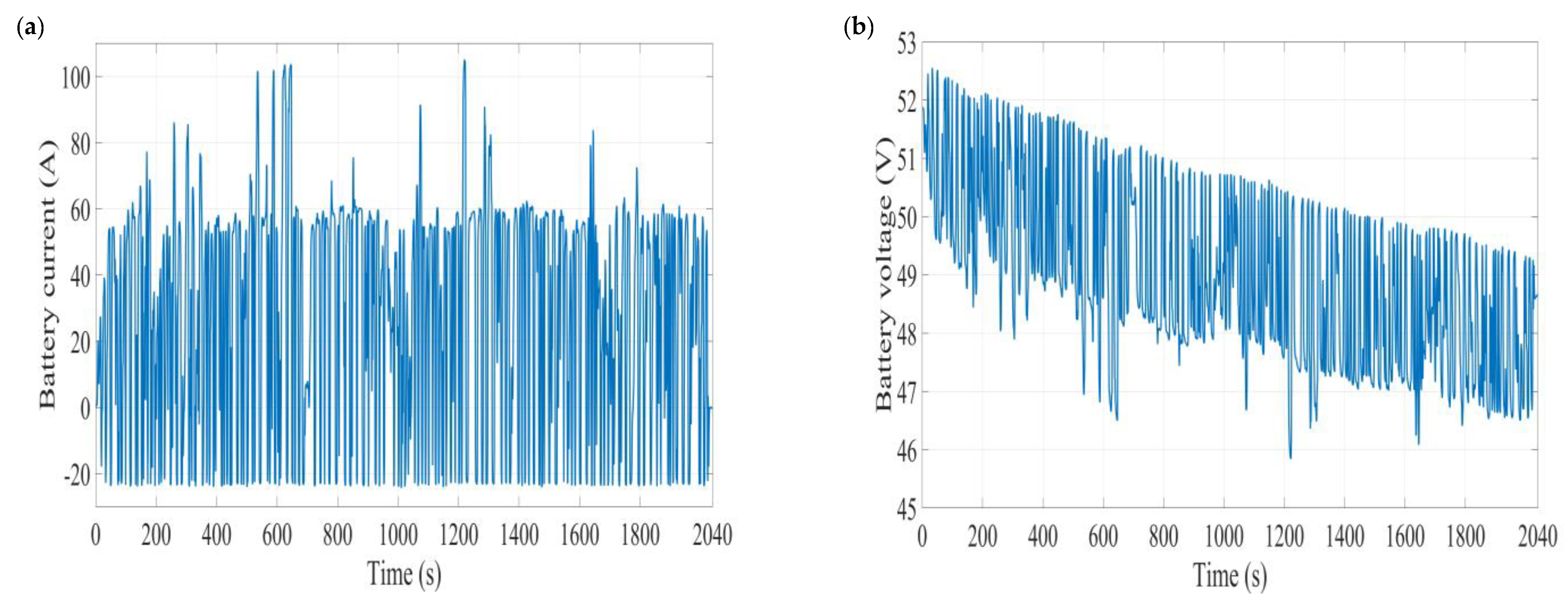
- DC current and voltage output from the battery (during motoring) and into the battery (during regeneration)
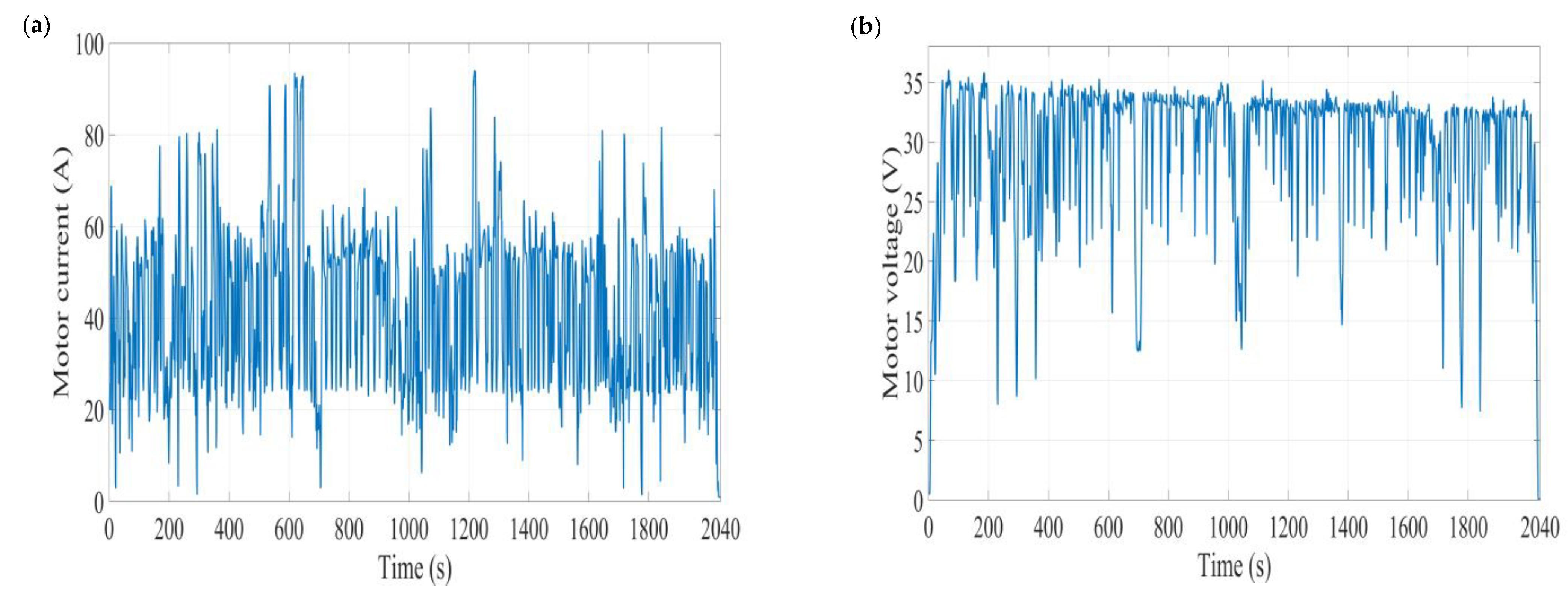
- AC currents and AC voltages input to the motor (output from the inverter)
- Fundamental frequency of the operation and power factor (AC side)
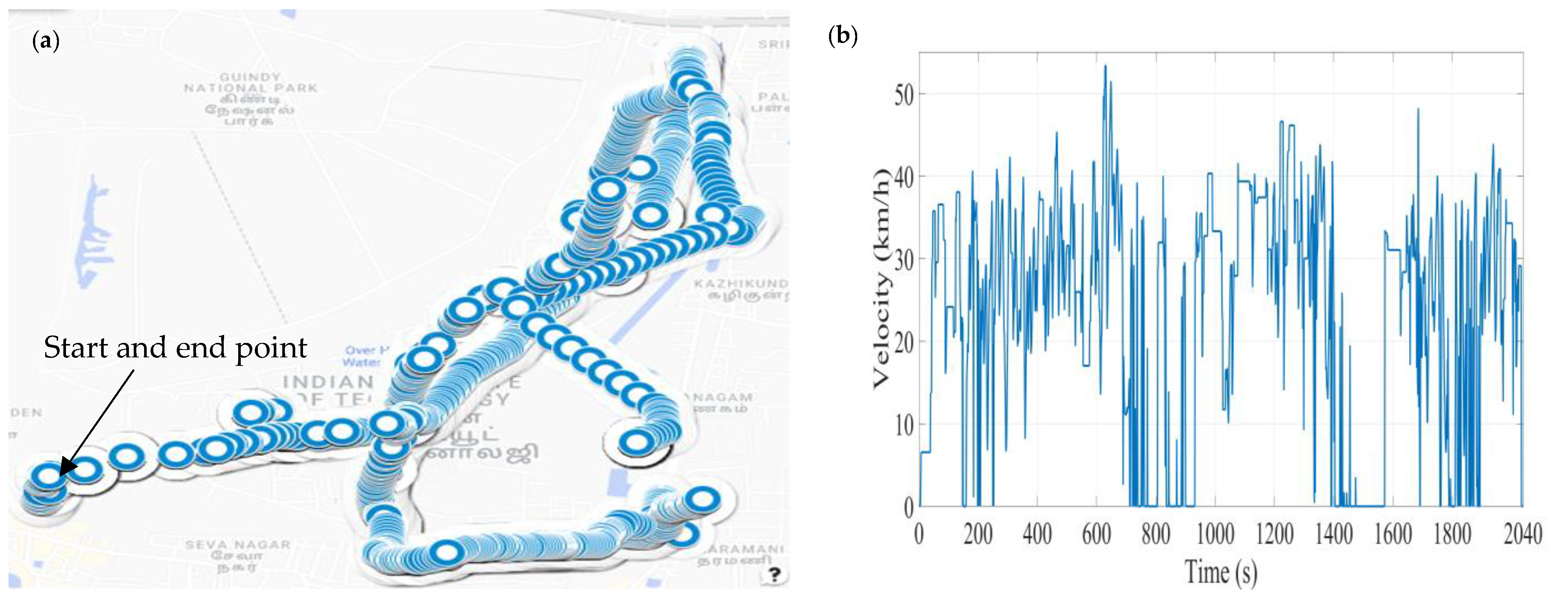
- Distance covered, velocity, acceleration, and GPS parameters
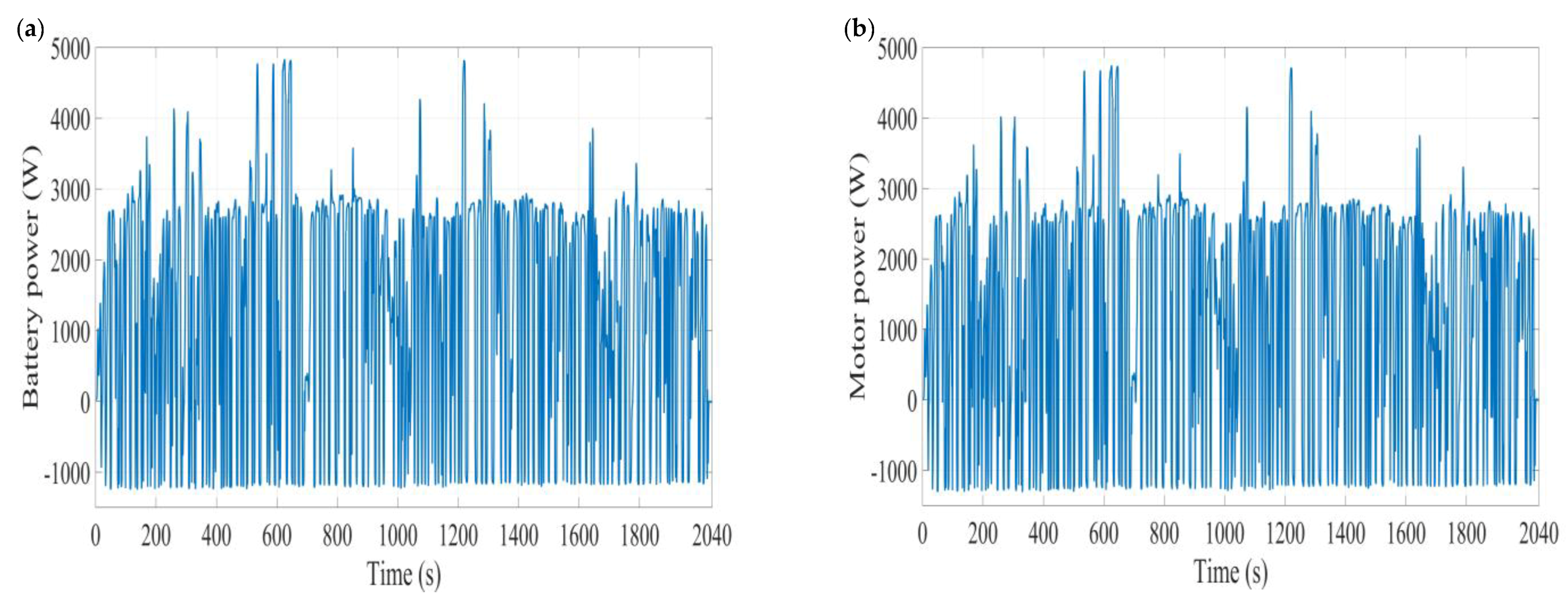
- DC power output from the battery (during motoring) and into the battery (during regeneration)
- AC power input to the motor (output from the inverter)
- Inverter efficiency
- Battery state of charge (SoC)
- Torque and speed of the motor.
2.4.1. Calculation of Power Output from the Battery (DC) and Power Input to the Motor (AC)
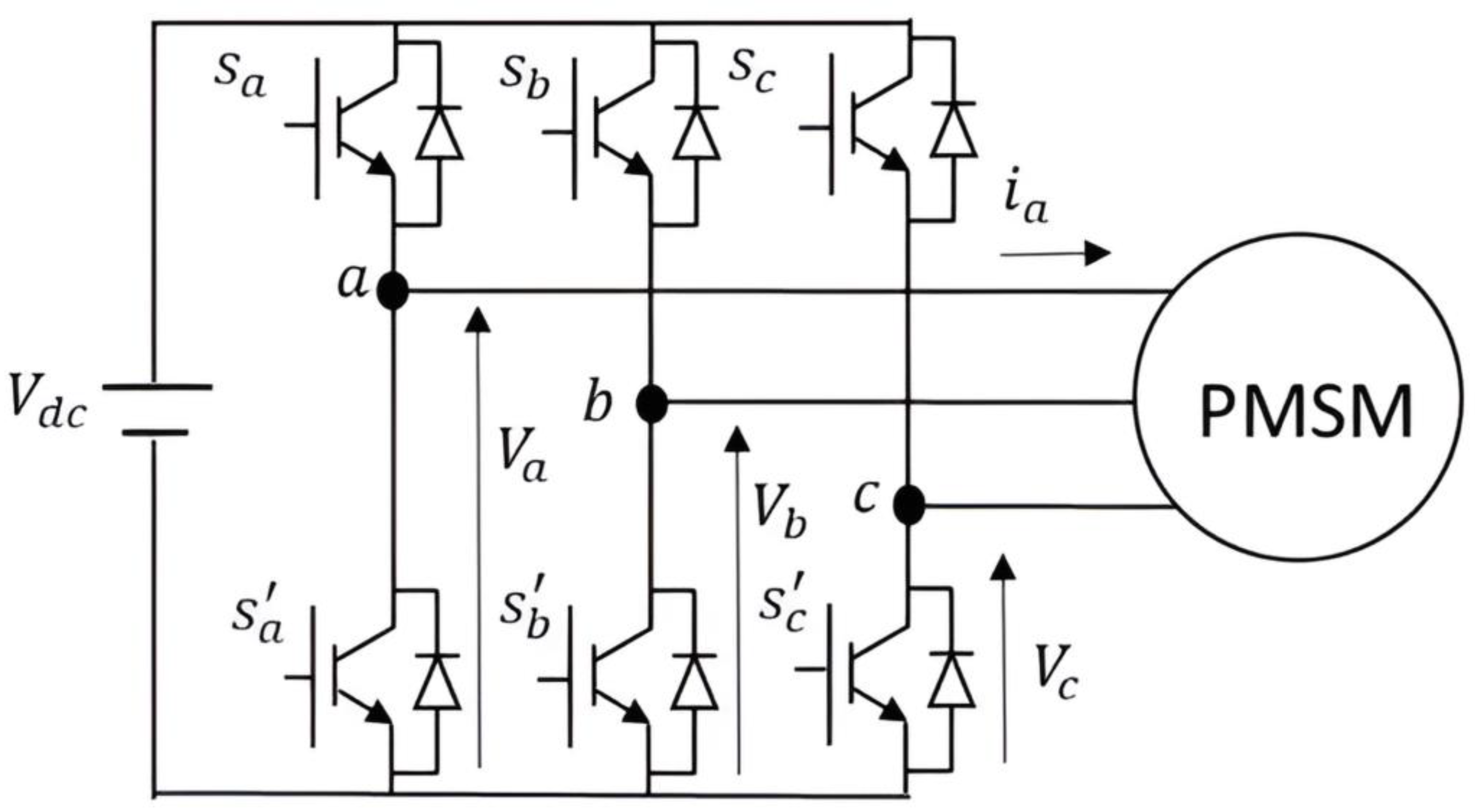
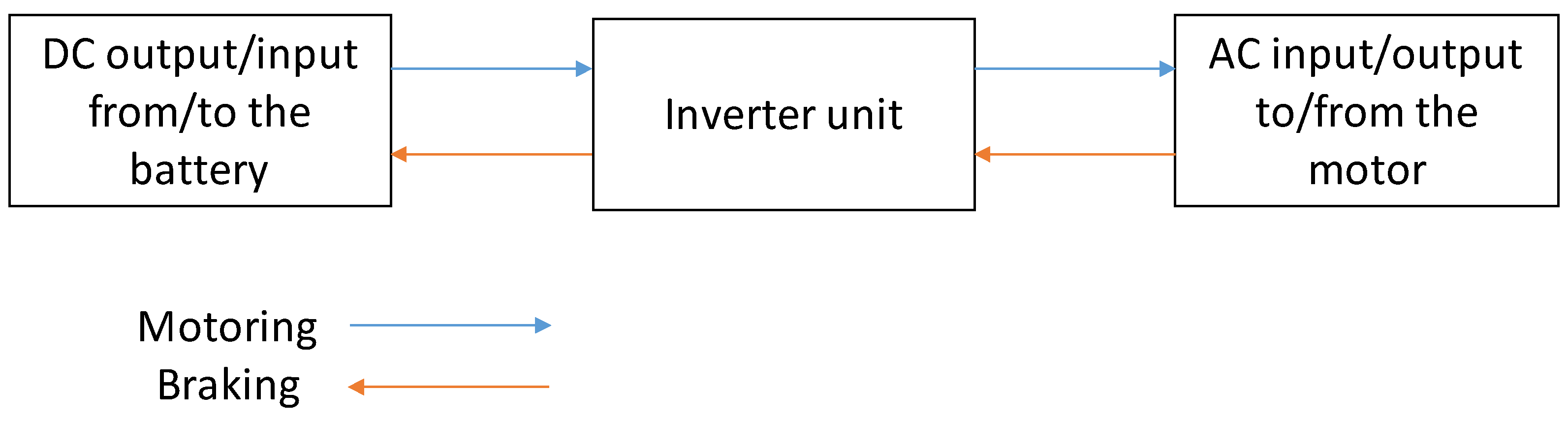
2.4.2. Inverter Topology and Calculation of Inverter Efficiency
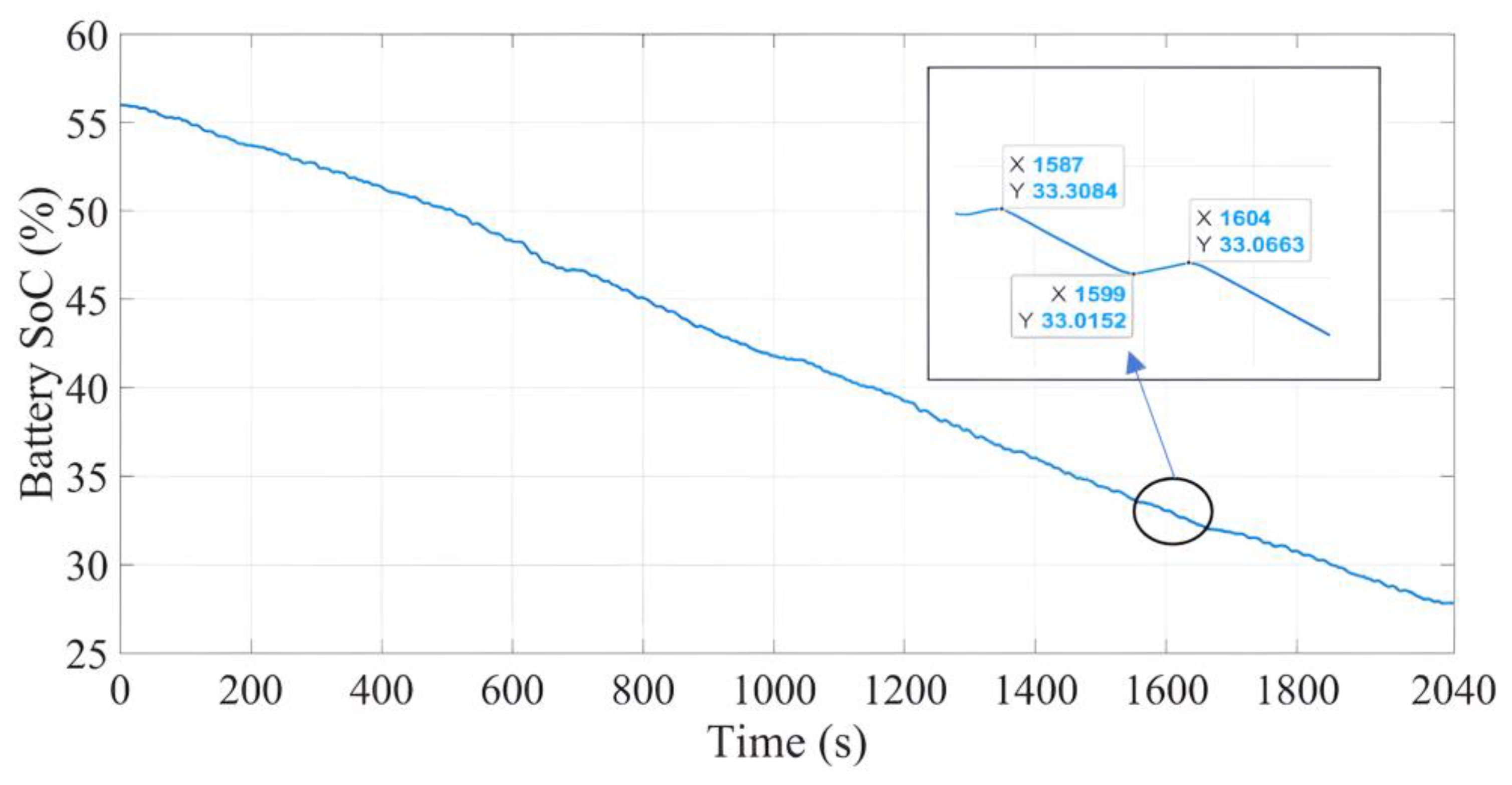
2.4.3. Battery State of Charge (SoC)
2.4.4. Calculation of Motor Speed and Torque
3. Results and Discussion
3.1. Recorded Data and Plots
3.2. Battery SoC
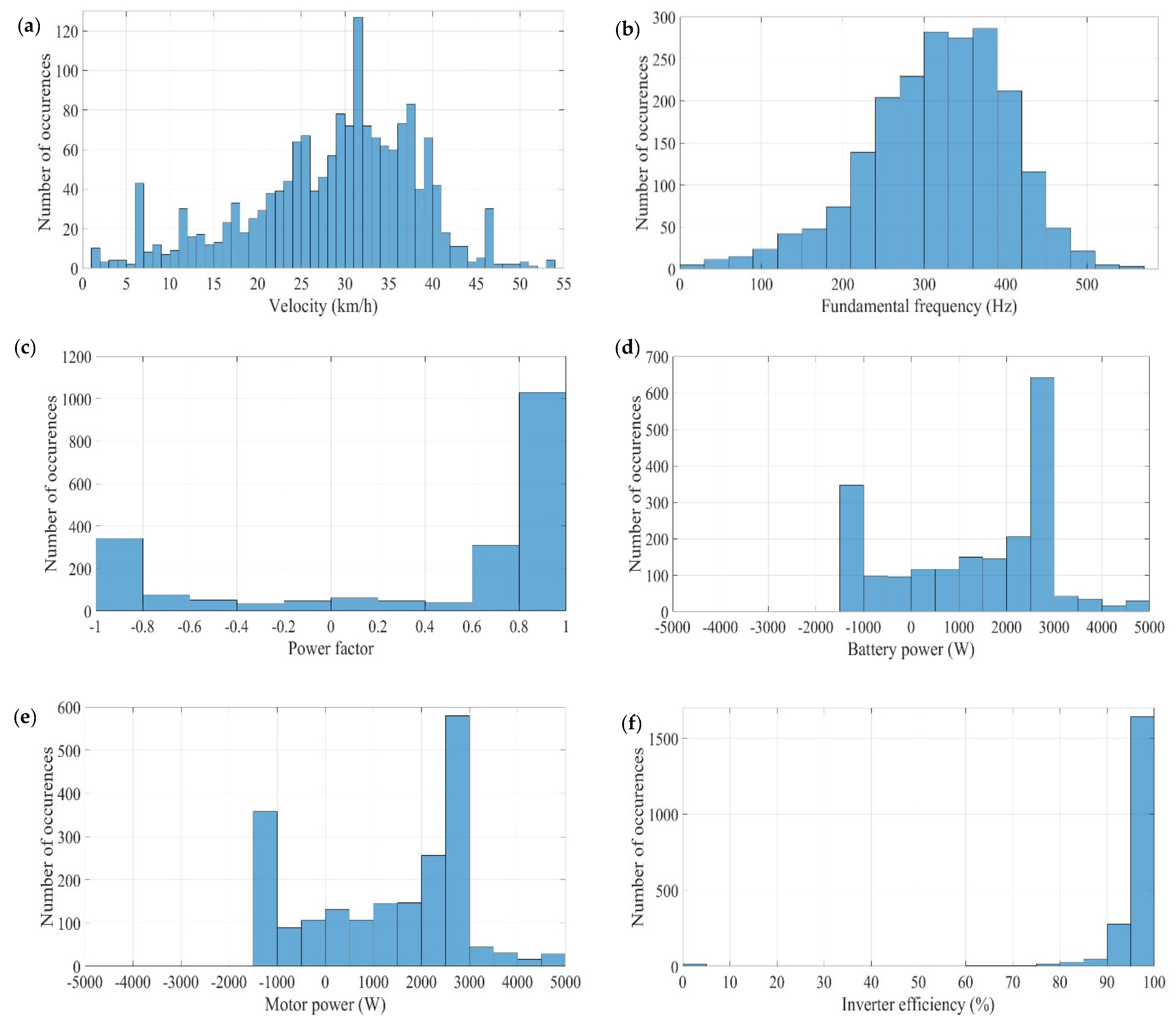
3.3. Statistical Analysis
3.4. Torque Speed Characteristics and Two-Quadrant Operation of the Motor
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bae, C.; Kim, J. Alternative fuels for internal combustion engines. Proc. Combust. Inst. 2017, 36, 3389–3413. [Google Scholar] [CrossRef]
- Barbosa, F.C. Natural Gas and Biogas Use in Transit Bus Fleets—A Technical, Operational and Environmental Approach; SAE Paper No. 2014-36-0194; SAE: Warrendale, PA, USA, 2014. [Google Scholar]
- Kurien, C.; Mittal, M. Review on the production and utilization of green ammonia as an alternate fuel in dual-fuel compression ignition engines. Energy Convers. Manag. 2022, 251, 114990. [Google Scholar] [CrossRef]
- Duronioa, F.; Vitaa, A.D.; Alloccab, L.; Anatonea, M. Gasoline direct injection engines—A review of latest technologies and trends. Part 1: Spray breakup process. Fuel 2020, 265, 116948. [Google Scholar] [CrossRef]
- Duronioa, F.; Vitaa, A.D.; Montanarob, A.; Villantea, C. Gasoline direct injection engines—A review of latest technologies and trends. Part 2. Fuel 2020, 265, 116947. [Google Scholar] [CrossRef]
- Jose, J.V.; Mittal, M.; Ramesh, A. Development of a Small-Bore Gasoline Direct-Injection Engine, and Enhancement of Its Performance Using Multiple-Injection Strategies. SAE Int. J. Engines 2021, 14, 115–133. [Google Scholar] [CrossRef]
- Kalghatgi, G.; Agarwal, A.K.; Goyal, H.; Houidi, M.B. Introduction to Gasoline Compression Ignition Technology: Future Prospects Gasoline Compression Ignition Technology. In Energy, Environment, and Sustainability; Springer: Singapore, 2022. [Google Scholar] [CrossRef]
- Cung, K.; Moiz, A.A.; Smith, E.M., III; Bitsis, D.C., Jr.; Michlberger, A.; Briggs, T.; Miwa, J. Gasoline compression ignition (GCI) combustion of pump-grade gasoline fuel under high compression ratio diesel engine. Transp. Eng. 2021, 4, 100066. [Google Scholar] [CrossRef]
- Krishnasamy, A.; Gupta, S.K.; Reitz, R.D. Prospective fuels for diesel low temperature combustion engine applications: A critical review. Int. J. Engine Res. 2021, 22, 2071–2106. [Google Scholar] [CrossRef]
- Choi, D.; Miles, P.C.; Yun, H.; Reitz, R.D. A Parametric Study of Low-Temperature, Late-Injection Combustion in a HSDI Diesel Engine. JSME Int. J. Ser. B Fluids Therm. Eng. 2005, 48, 656–664. [Google Scholar] [CrossRef]
- Ramesh, N.; Mallikarjuna, J.M. Low temperature combustion strategy in an off-highway diesel engine—Experimental and CFD study. Appl. Therm. Eng. 2017, 124, 844–854. [Google Scholar] [CrossRef]
- Yang, Q.; Tian, S.; Wang, Z.; Xu, B. Adaptive Hybrid Thermostat Control Strategy for Series Hybrid Electric Vehicles; SAE Technical Paper 2021-01-7024; SAE: Warrendale, PA, USA, 2021. [Google Scholar]
- Bhavsar, D.; Nirapure, P.; Kanupriya, M.; Mittal, M. Modeling and Simulation of Energy Management for a Hybrid Electric Two-Wheeler. In Proceedings of the International Conference on Electrical, Computer, Communications and Mechatronics Engineering, Tenerife, Canary Islands, Spain, 19–21 July 2023. [Google Scholar] [CrossRef]
- Trovao, J.P.F.; Santos, V.D.; Antunes, C.H.; Pereirinha, P.G.; Jorge, H.M. A Real-Time Energy Management Architecture for Multisource Electric Vehicles. IEEE Trans. Ind. Electron. 2015, 62, 3223–3233. [Google Scholar] [CrossRef]
- Jinglai, W.; Jiageng, R.; Nong, Z.; Paul, D.W. An Optimized Real-Time Energy Management Strategy for the Power-Split Hybrid Electric Vehicles. IEEE Trans. Control. Syst. Technol. 2019, 27, 1194–1202. [Google Scholar] [CrossRef]
- Iora, P.; Tribioli, L. Effect of Ambient Temperature on Electric Vehicles’ Energy Consumption and Range: Model Definition and Sensitivity Analysis Based on Nissan Leaf Data. World Electr. Veh. J. 2019, 10, 2. [Google Scholar] [CrossRef]
- Fiori, C.; Ahn, K.; Rakha, H.A. Power-based electric vehicle energy consumption model: Model development and validation. Appl. Energy 2016, 168, 257–268. [Google Scholar] [CrossRef]
- Zhang, R.; Yao, E. Electric vehicles’ energy consumption estimation with real driving condition data. Transp. Res. Part D 2015, 41, 177–187. [Google Scholar] [CrossRef]
- Yang, S.C.; Li, M.; Lin, Y.; Tang, T.Q. Electric vehicle’s electricity consumption on a road with different slope. Phys. A Stat. Mech. Appl. 2014, 402, 41–48. [Google Scholar] [CrossRef]
- Kolachalama, S.; Surti, I.; Malik, H. Interpretation of the Electric Vehicle Operating Point in Real Time; Experimental Results; SAE: Warrendale, PA, USA; Volume 4, pp. 1–9. [CrossRef]
- Kolachalama, S.; Malik, H. Neural Network Model to Predict the Thermal Operating Point of an Electric Vehicle; SAE Technical Paper 2023-01-0134; SAE: Warrendale, PA, USA, 2023. [Google Scholar] [CrossRef]
- Wu, X.; Freese, D.; Cabrera, A.; Kitch, W.A. Electric vehicles’ energy consumption measurement and estimation. Transp. Res. Part D 2015, 34, 52–67. [Google Scholar] [CrossRef]
- Al-Wreikat, Y.; Serrano, C.; Sodr, J.R. Effects of ambient temperature and trip characteristics on the energy consumption of an electric vehicle. Energy 2022, 238, 122028. [Google Scholar] [CrossRef]
- Dost, P.; Spichartz, P.; Sourkounis, C. Temperature influence on state-of-the-art electric vehicles’ consumption based on fleet measurements. In Proceedings of the 2015 International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles (ESARS), Aachen, Germany, 3–5 March 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Steinstraeter, M.; Buberger, J.; Minnerup, K.; Trifonov, D.; Horner, P.; Weiss, B.; Lienkamp, M. Controlling cabin heating to improve range and battery lifetime of electric vehicles. eTransportation 2022, 13, 100181. [Google Scholar] [CrossRef]
- Sato, S.; Jiang, Y.J.; Russell, R.L.; Miller, J.W.; Karavalakis, G.; Durbin, T.D.; Johnson, K.C. Experimental driving performance evaluation of battery-powered medium and heavy duty all-electric vehicles. Int. J. Electr. Power Energy Syst. 2022, 141, 108100. [Google Scholar] [CrossRef]
- Hairr, M.E.; Griffith, P.; Bailey, J.R.; Madden, W. Data Acquisition System for Electric- and Hybrid-Electric Buses. World Electr. Veh. J. 2009, 3, 413–419. [Google Scholar] [CrossRef]
- Kersten, A.; Kuder, M.; Grunditz, E.; Geng, Z.; Wikner, E.; Thiringer, T.; Weyh, T.; Eckerle, R. Inverter and Battery Drive Cycle Efficiency Comparisons of CHB and MMSP Traction Inverters for Electric Vehicles. In Proceedings of the 21st European Conference on Power Electronics and Applications, EPE 2019 ECCE Europe, Genova, Italy, 3–5 September 2019; pp. 1–12. [Google Scholar] [CrossRef]
- Pou, J.; Osorno, D.; Zaragoza, J.; Jaen, C.; Ceballos, S. Power losses calculation methodology to evaluate inverter efficiency in electrical vehicles. In Proceedings of the 2011 7th International Conference-Workshop Compatibility and Power Electronics (CPE), Tallinn, Estonia, 1–3 June 2011; pp. 404–409. [Google Scholar] [CrossRef]
- Hayashi, K.; Ijima, T.; Kobayashi, H. Power Measurement in the Development of EV Motors and Inverters; Hioki Technical Article; Hioki E.E.Corporation: Nagano, Japan, 2022. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Specification |
|---|---|
| Mass of the vehicle | 133 kg |
| Total mass (vehicle + riders + system) | 290 kg |
| Tire diameter | 304.8 mm |
| Top speed | 63 km/h |
| Maximum torque | 20 Nm at 1950 rpm |
| Vehicle range | 90 km (Eco mode) under standard conditions |
| Battery type | Lithium-ion battery |
| Battery voltage | 50.4 V |
| Battery capacity | 57.24 Ah |
| Battery energy capacity | 2.9 kWh |
| Auxiliary battery | 12 V 3 Ah VRLAs |
| Charging supply specifications | 230 V, 5A, 50 Hz AC supply |
| Power electronic converter (AC to DC) | Input: 160 to 265 V, 5.7 A max., 50 Hz Output: 50 V, 16 A, 800 W |
| Motor type | 3-phase AC permanent magnet synchronous 8-pole machine |
| Continuous power | 4.1 kW |
| Transmission | Single Speed Constant Mesh Gear Box |
| Parameter | Minimum | Maximum | Mean |
|---|---|---|---|
| Velocity (km/h) | 0 | 53.4 | 23.1 |
| Battery current (A) (avg.) | −24.3 | 105 | 28.4 |
| Battery voltage (V) (avg.) | 45.8 | 52.6 | 49 |
| Battery power (W) (avg.) | −1247.8 | 4833.7 | 1353 |
| Motor voltage (V) (RMS per phase) | 0 | 36 | 29.6 |
| Motor current (A) (RMS per phase) | 0 | 94.1 | 42.5 |
| Motor Power (W) (avg.) | −1308.2 | 4747.5 | 1287.2 |
| Inverter efficiency (%) | 0 | 99.7 | 95 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bhavsar, D.; Jaychandra, R.K.; Mittal, M. Data Acquisition and Performance Analysis during Real-Time Driving of a Two-Wheeler Electric Vehicle—A Case Study. World Electr. Veh. J. 2024, 15, 121. https://doi.org/10.3390/wevj15030121
Bhavsar D, Jaychandra RK, Mittal M. Data Acquisition and Performance Analysis during Real-Time Driving of a Two-Wheeler Electric Vehicle—A Case Study. World Electric Vehicle Journal. 2024; 15(3):121. https://doi.org/10.3390/wevj15030121
Chicago/Turabian StyleBhavsar, Divyakumar, Ramesh Kaipakam Jaychandra, and Mayank Mittal. 2024. "Data Acquisition and Performance Analysis during Real-Time Driving of a Two-Wheeler Electric Vehicle—A Case Study" World Electric Vehicle Journal 15, no. 3: 121. https://doi.org/10.3390/wevj15030121
APA StyleBhavsar, D., Jaychandra, R. K., & Mittal, M. (2024). Data Acquisition and Performance Analysis during Real-Time Driving of a Two-Wheeler Electric Vehicle—A Case Study. World Electric Vehicle Journal, 15(3), 121. https://doi.org/10.3390/wevj15030121