

Optimization of a Shift Control Strategy for Pure Electric Commercial Vehicles Based on Driving Intention
Abstract
1. Introduction
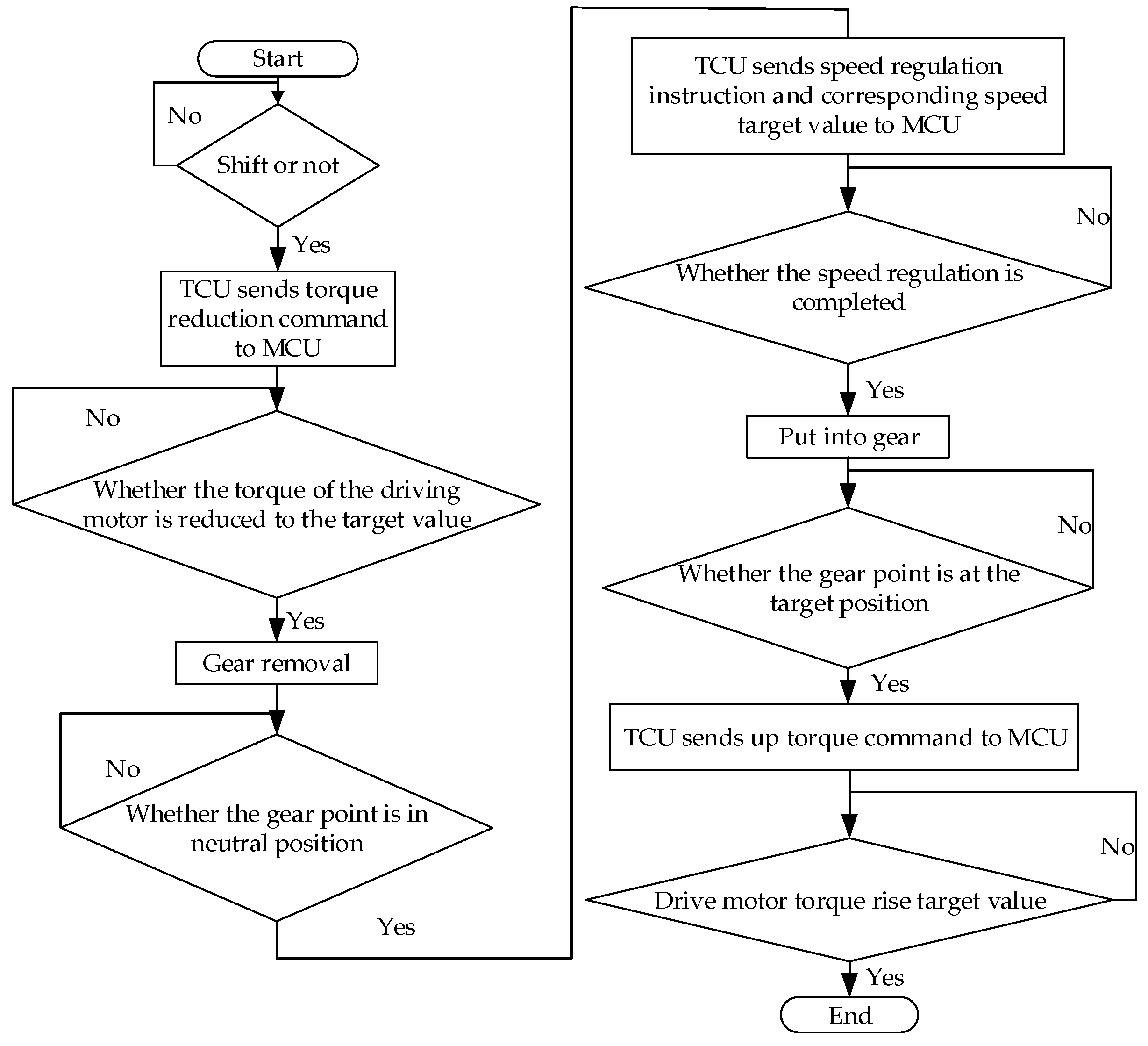
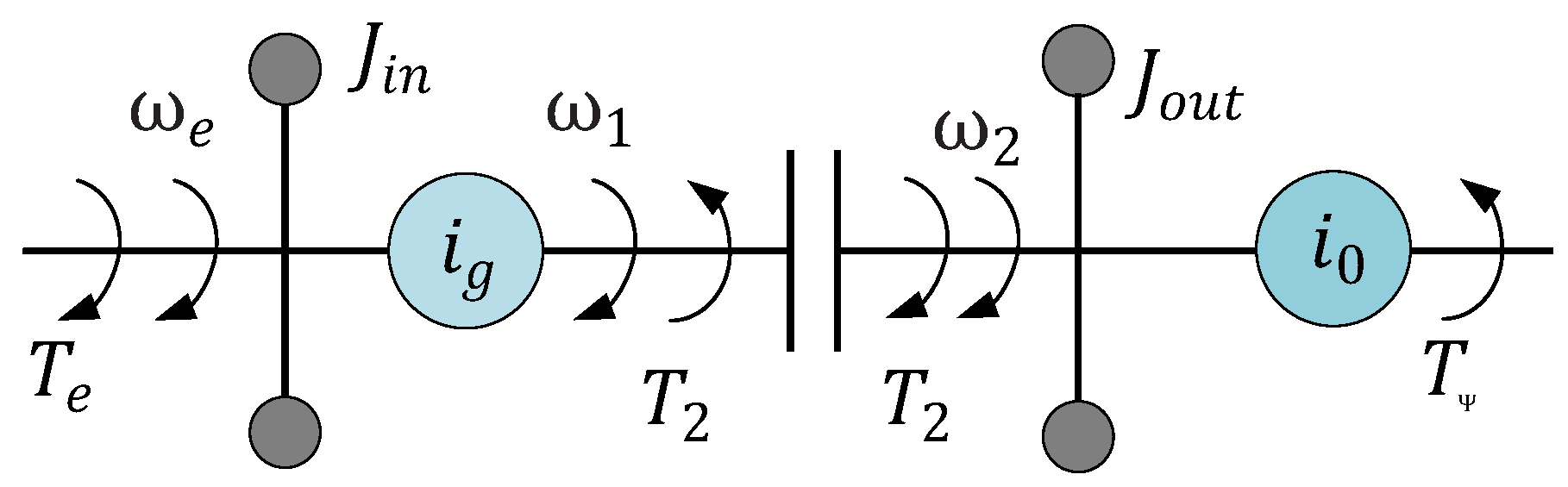
2. Analysis of Shift Process of AMT without Synchronizer
2.1. Driving in Original Gear
2.2. Uninstall Phase
2.3. Picking, Speed Regulation, and Hanging Gear Stages
2.4. Torque Recovery Stage
2.5. New Gear Driving
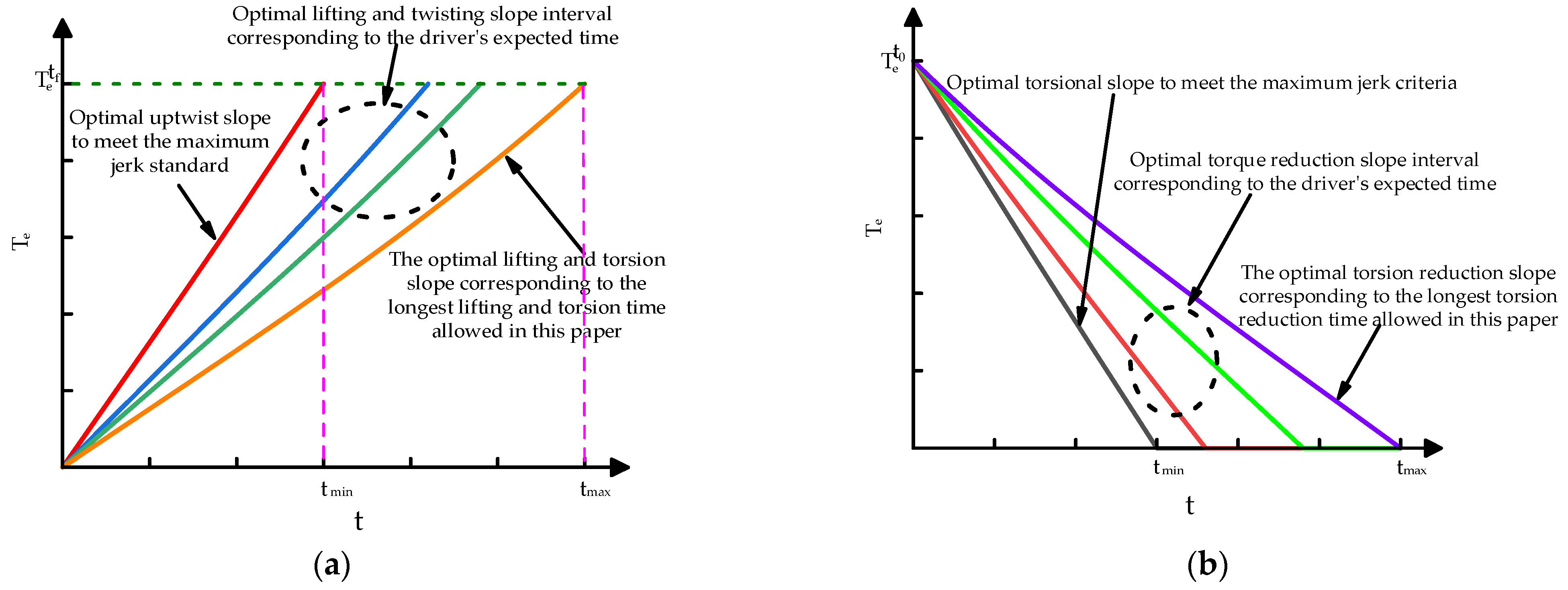
3. Control of Lifting and Twisting Process Based on Driver Intention Identification
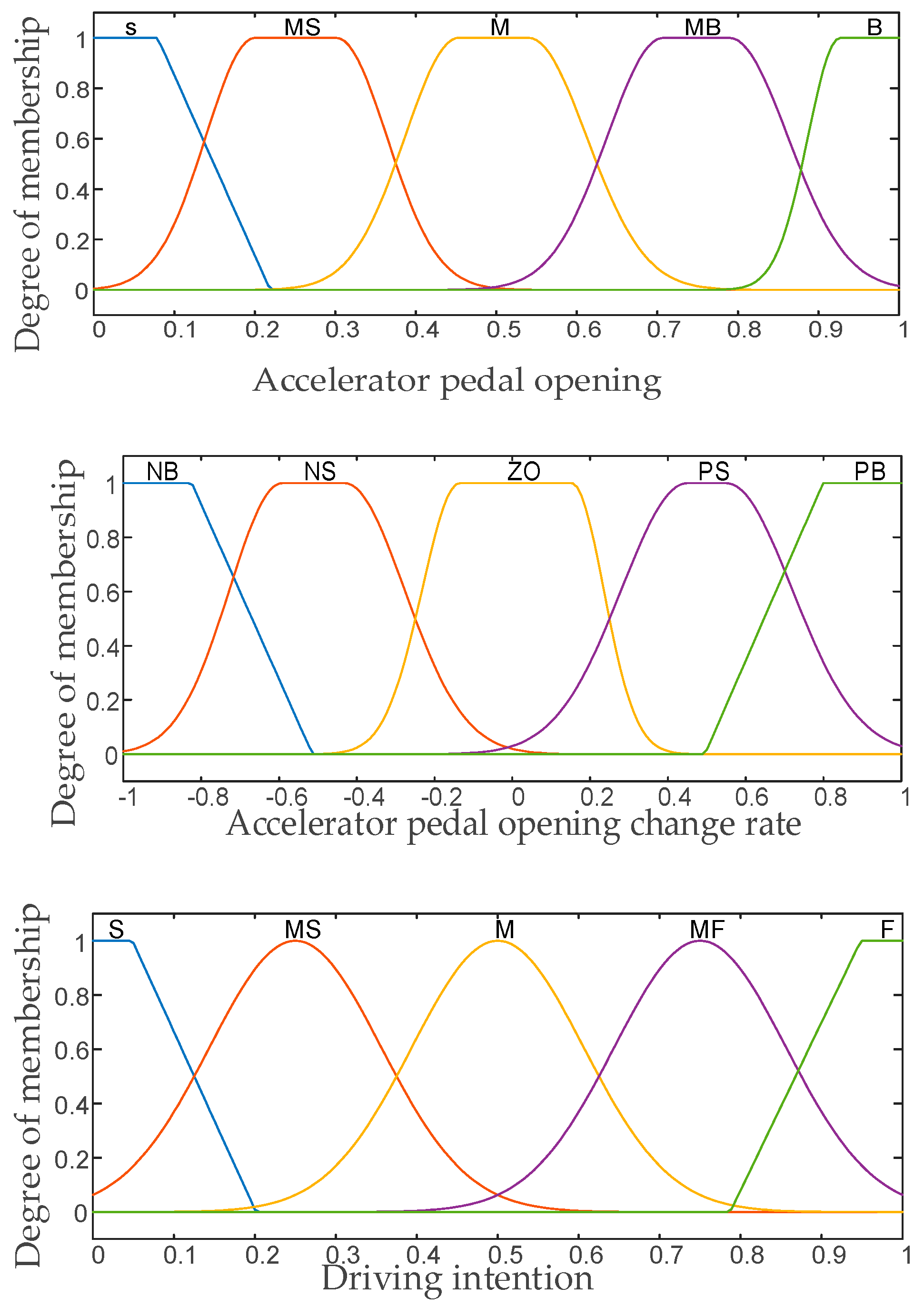
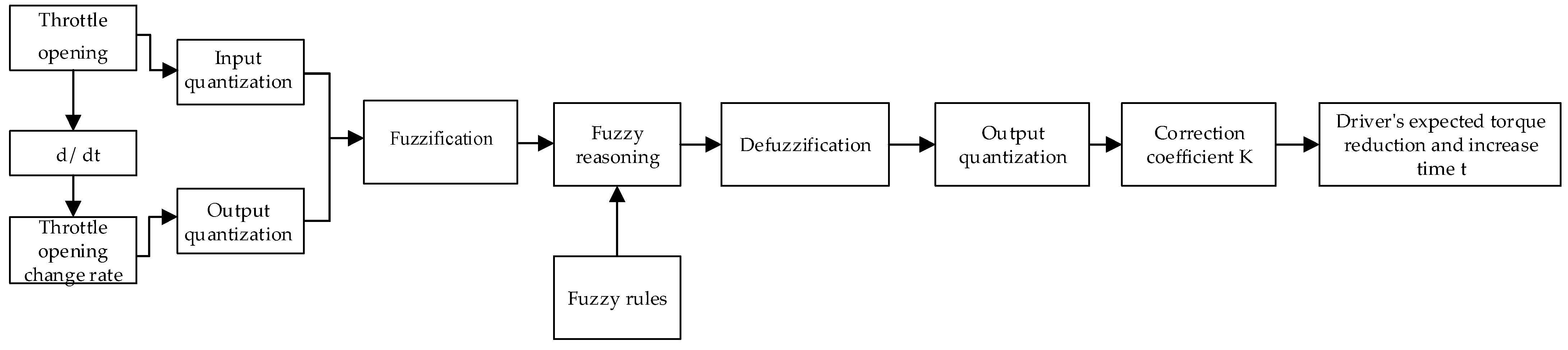
3.1. Establishing a Fuzzy Controller
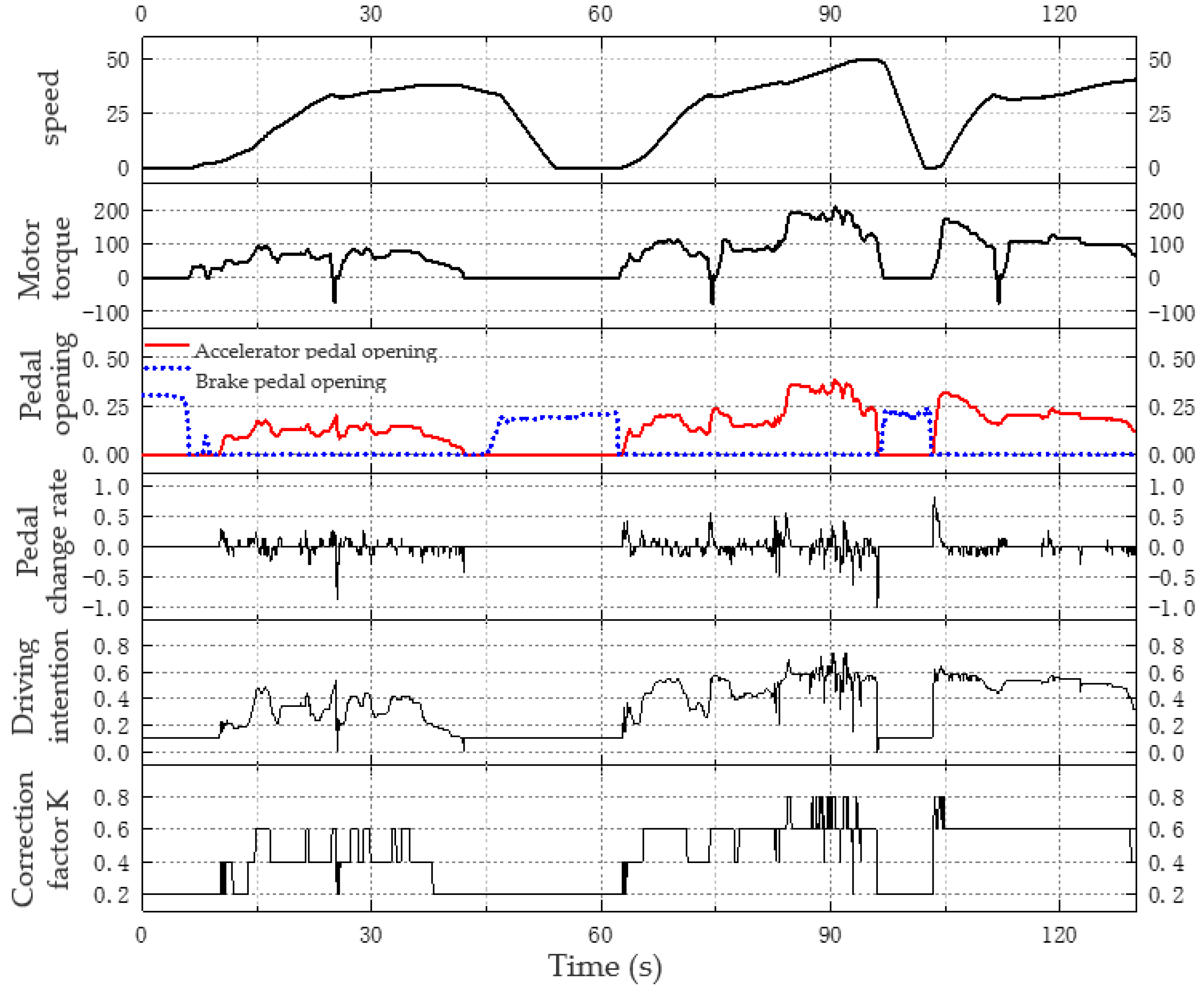
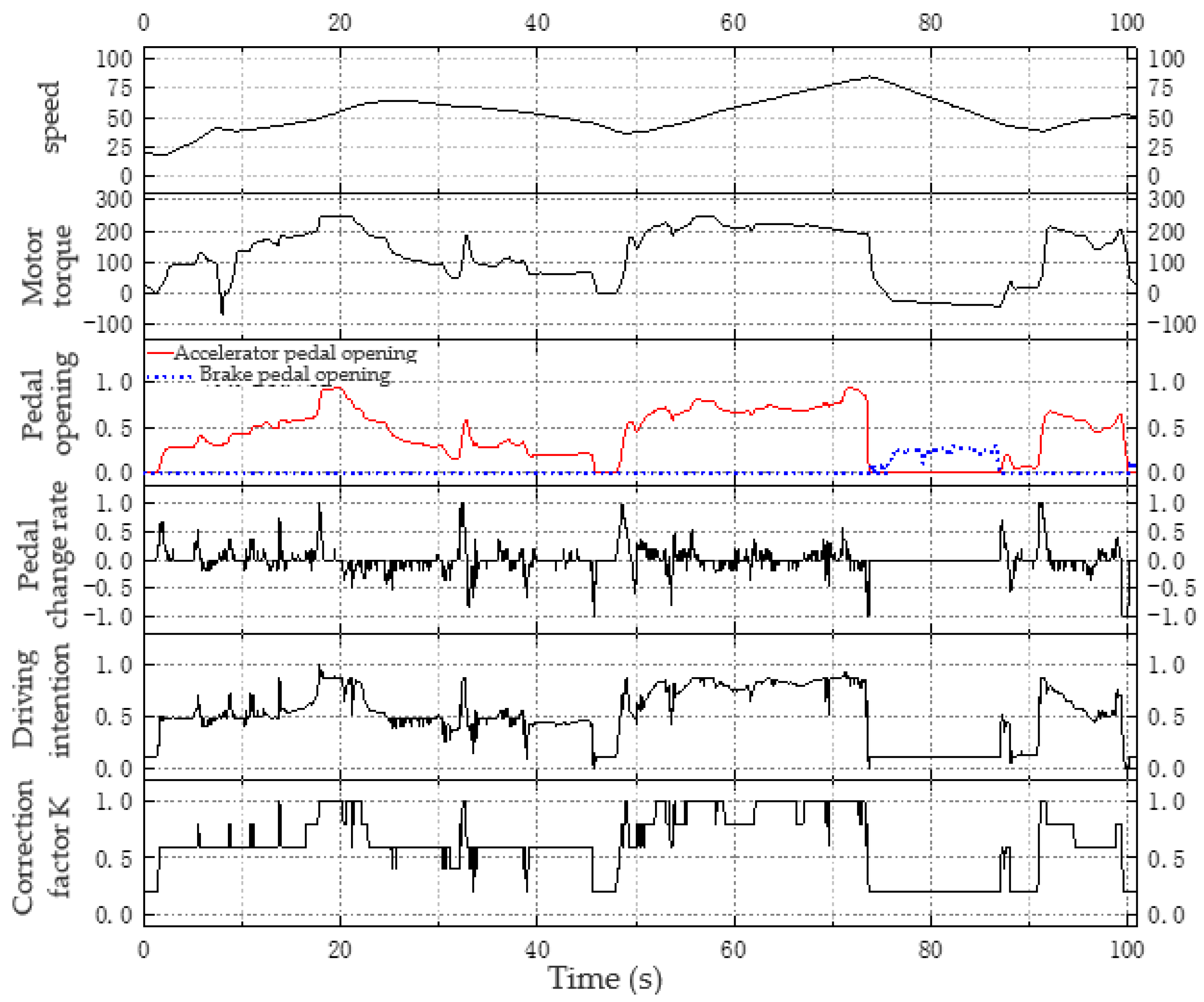
3.2. Simulation and Analysis of Driving Intention Recognition
4. Real Vehicle Verification
4.1. Build a Real Vehicle Test Platform
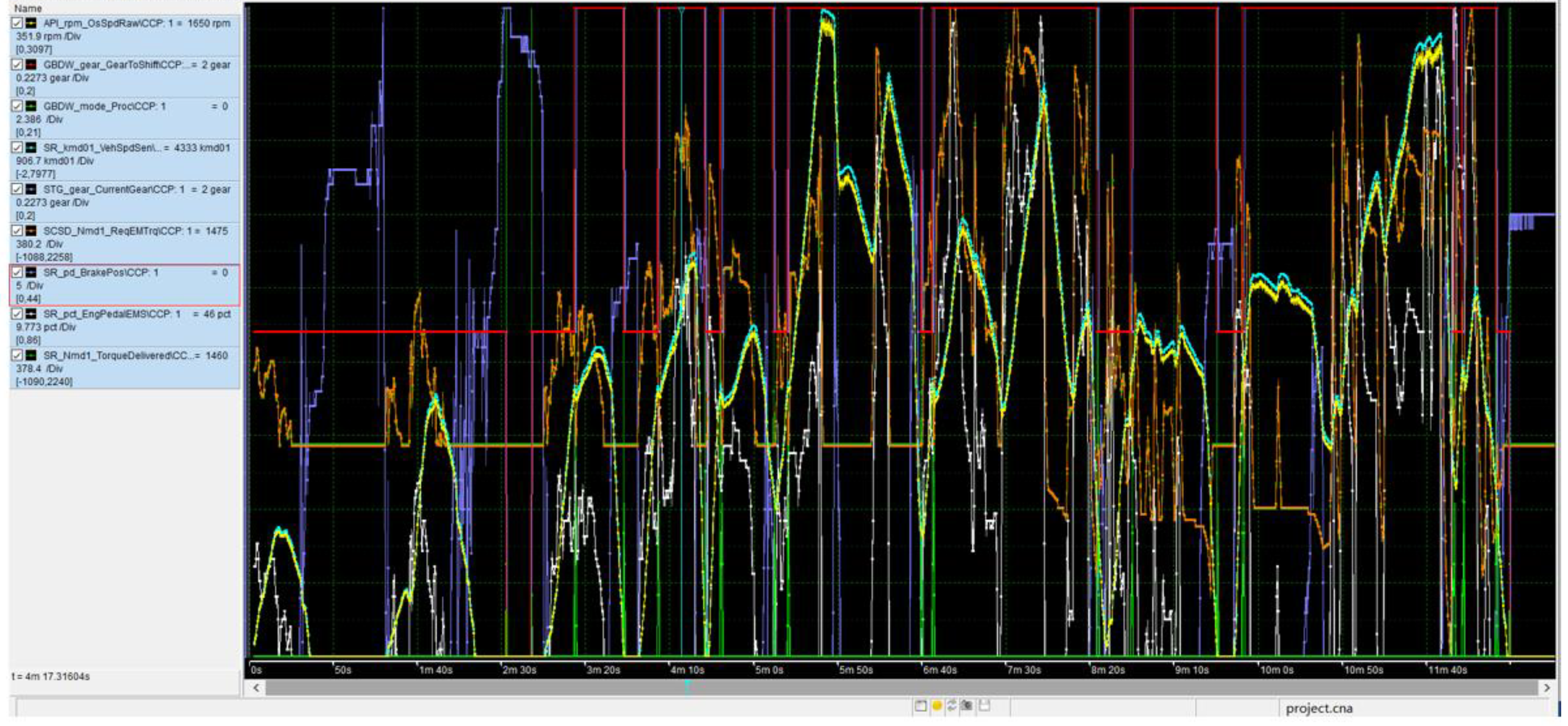
4.2. Analysis of Experimental Data
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sarah, J.G.; André, P.C.F. Performance of batteries for electric vehicles on short and longer term. J. Power Sources 2012, 212, 111–129. [Google Scholar]
- Zheng, S. Analysis on the present situation and development trend of automobile automatic transmission. Auto Time 2021, 16, 149–150. [Google Scholar] [CrossRef]
- Liu, W.; Bi, S.; Xu, C. Shifting Strategy for Two-speed AMT of Electric Vehicle. J. Chongqing Inst. Technol. (Nat. Sci.) 2021, 35, 41–49. [Google Scholar]
- Wang, D.; Liu, G.; Jin, Y. Gear-shifting Control of Clutchless Automated Mechanical Transmission without Synchronizer in Short-distance Pure Electric Vehicle. China J. Highw. Transp. 2017, 30, 144–152. [Google Scholar]
- Xiao, L.; Wang, M.; Zhong, Z. Coordinated Shift Control and Experimental Study of Two-speed AMT for Pure Electric Vehicle. J. Hunan Univ. (Nat. Sci.) 2019, 46, 10–18. [Google Scholar] [CrossRef]
- Zhu, X.; Zhang, H.; Xi, J.; Wang, J.; Fang, Z. Robust speed synchronization control for clutchless automated manual transmission systems in electric vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2015, 229, 424–436. [Google Scholar] [CrossRef]
- Tseng, C.-Y.; Yu, C.-H. Advanced shifting control of synchronizer mechanisms for clutchless automatic manual transmission in an electric vehicle. Mech. Mach. Theory 2015, 84, 37–56. [Google Scholar] [CrossRef]
- Tian, Y.; Yang, H.; Mo, W.; Zhou, S.; Zhang, N.; Walker, P.D. Optimal coordinating gearshift control of a two-speed transmission for battery electric vehicles. Mech. Syst. Signal Process. 2020, 136, 106521. [Google Scholar] [CrossRef]
- Dong, A. Study of Complete Torque Shifting Control for Clutchless AMT of Electric Vehicles. Ph.D. Thesis, Beijing Institute of Technology, Beijing, China, 2016. [Google Scholar]
- Lin, C.; Yi, J.; Tian, Y. State estimation and parameter identification of AMT shift actuator for electric buses. Automot. Eng. 2022, 44, 1237–1250. [Google Scholar] [CrossRef]
- Wang, X.; Li, L.; He, K.; Liu, C. Dual-loop self-learning fuzzy control for AMT gear engagement: Design and experiment. IEEE Trans. Fuzzy Syst. 2018, 26, 1813–1822. [Google Scholar] [CrossRef]
- Roozegar, M.; Angeles, J. A two-phase control algorithm for gear-shifting in a novel multispeed transmission for electric vehicles. Mech. Syst. Signal Process. 2018, 104, 145–154. [Google Scholar] [CrossRef]
- Roozegar, M.; Setiawan, Y.D.; Angeles, J. Design, modelling and estimation of a novel modular multi-speed transmission system for electric vehicles. Mechatronics 2017, 45, 119–129. [Google Scholar] [CrossRef]
- Roozegar, M.; Angeles, J. The optimal gear-shifting for a multi-speed transmission system for electric vehicles. Mech. Mach. Theory 2017, 116, 7–15. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, H.; Qiu, M.; Qin, F. A new tracking control of shift displacement constraint for electric vehicle. J. Appl. Mech. 2020, 37, 1381–1389. [Google Scholar] [CrossRef]
- Zhang, D.; Zong, Z.; Feng, J. Multi-objective optimization of shifting rule of two-speed AMT based on NSGA-IIalgorithm. J. Chongqing Jiaotong Univ. (Nat. Sci.) 2021, 40, 128–135. [Google Scholar]
- Wang, H.; Wu, H. Implementation of an Energy Management Strategy with Drivability Constraints for a Dual-Motor Electric Vehicle. World Electr. Veh. J. 2019, 10, 28. [Google Scholar] [CrossRef]
- Liu, T.; Zeng, X.; Song, D. MPC-Based Coordinated Control of Gear Shifting Process for a Power-split Hybrid Electric Bus with a Clutchless AMT. Chin. J. Mech. Eng. 2022, 35, 144. [Google Scholar] [CrossRef]
- Kim, Y.K.; Kim, H.W.; Lee, I.S.; Park, S.M.; Mok, H.S. A speed control for the reduction of the shift shocks in electric vehicles with a two-speed AMT. J. Power Electron. 2016, 1613, 55–1366. [Google Scholar] [CrossRef]
- Lin, X.; Li, Y.; Xia, B. An online driver behavior adaptive shift strategy for two-speed AMT electric vehicle based on dynamic corrected factor. Sustain. Energy Technol. Assess. 2021, 48, 101598. [Google Scholar] [CrossRef]
- Yang, L.; Park, D.; Lyu, S.; Zheng, C.; Kim, N. Optimal Control for Shifting Command of Two-Speed Electric Vehicles Considering Shifting Loss. Int. J. Automot. Technol. 2023, 24, 1051–1059. [Google Scholar] [CrossRef]
- Bing, W.; Mingyao, Y.; Jinglai, W.; Xianqian, H.; Nong, Z. Novel shift process control strategy for two-speed clutchless automatic mechanical transmission based on segmented speed regulation. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2023, 09544070221148233. [Google Scholar] [CrossRef]
- Ahssan, M.R.; Ektesabi, M.; Gorji, S. Evaluation of a Three-Parameter Gearshift Strategy for a Two-Speed Transmission System in Electric Vehicles. Energies 2023, 16, 2496. [Google Scholar] [CrossRef]
- Liu, Y.; Zhao, P.; Qin, D.; Li, G.; Chen, Z.; Zhang, Y. Driving intention identification based on long short-term memory and a case study in shifting strategy optimization. IEEE Access 2019, 7, 128593–128605. [Google Scholar] [CrossRef]
- Gao, J.; Zhao, J.; Yang, S.; Xi, J. Control Strategy of Plug-in Hybrid Electric Bus Based on Driver Intention. J. Mech. Eng. 2016, 52, 107–114. [Google Scholar] [CrossRef]
- Li, Y. Study on Transient Shift Control of Two-Speed AMT of Pure Electric Vehicle. Master’s Thesis, Hefei University of Technology, Hefei, China, 2020. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accelerator Pedal Opening | Accelerator Pedal Opening Change Rate | ||||
|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | |
| NB | PB | PB | PM | PM | PS |
| NM | PB | PM | PM | PS | PS |
| NS | PM | PS | PS | PS | ZO |
| ZO | PB | PM | PS | ZO | PS |
| PS | NM | NS | ZO | PS | PS |
| Driving Intention | k | t |
|---|---|---|
| S | k = 0 | tS = tmax |
| MS | k = 0.2 | tMS = tmax − 0.2 × (tmax − tmin) |
| M | k = 0.4 | tM = tmax − 0.4 × (tmax − tmin) |
| ML | k = 0.6 | tML = tmax − 0.6 × (tmax − tmin) |
| L | k = 0.8 | tL = tmax − 0.8 × (tmax − tmin) |
| Parameter | Numerical Value |
|---|---|
| Curb weight of the whole vehicle | 3100 kg |
| Empty axle load mass (front/rear) | 60,000 kg |
| External dimensions (L × W × H) | 5995 × 2300 × 3140 mm |
| Wheelbase | 3300 mm |
| Rolling radius | 364 mm |
| Vehicle power | 87 kWh |
| Motor rated/peak power | 50/85 kW |
| Transmission first/second gear ratio | 3.77/1.44 |
| Rear axle final drive ratio | 6.166 |
| Maximum speed | 90 km/h |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xi, J.; Si, H.; Gao, J. Optimization of a Shift Control Strategy for Pure Electric Commercial Vehicles Based on Driving Intention. World Electr. Veh. J. 2024, 15, 44. https://doi.org/10.3390/wevj15020044
Xi J, Si H, Gao J. Optimization of a Shift Control Strategy for Pure Electric Commercial Vehicles Based on Driving Intention. World Electric Vehicle Journal. 2024; 15(2):44. https://doi.org/10.3390/wevj15020044
Chicago/Turabian StyleXi, Jianguo, Haozhe Si, and Jianping Gao. 2024. "Optimization of a Shift Control Strategy for Pure Electric Commercial Vehicles Based on Driving Intention" World Electric Vehicle Journal 15, no. 2: 44. https://doi.org/10.3390/wevj15020044
APA StyleXi, J., Si, H., & Gao, J. (2024). Optimization of a Shift Control Strategy for Pure Electric Commercial Vehicles Based on Driving Intention. World Electric Vehicle Journal, 15(2), 44. https://doi.org/10.3390/wevj15020044