
A Study on Consumers’ Willingness to Purchase Autonomous Vehicles from a Multi-Party Interaction Perspective: A Tripartite Evolutionary Game Model Involving the Government, Automobile Manufacturers, and Consumers


Abstract
1. Introduction
2. Model Construction
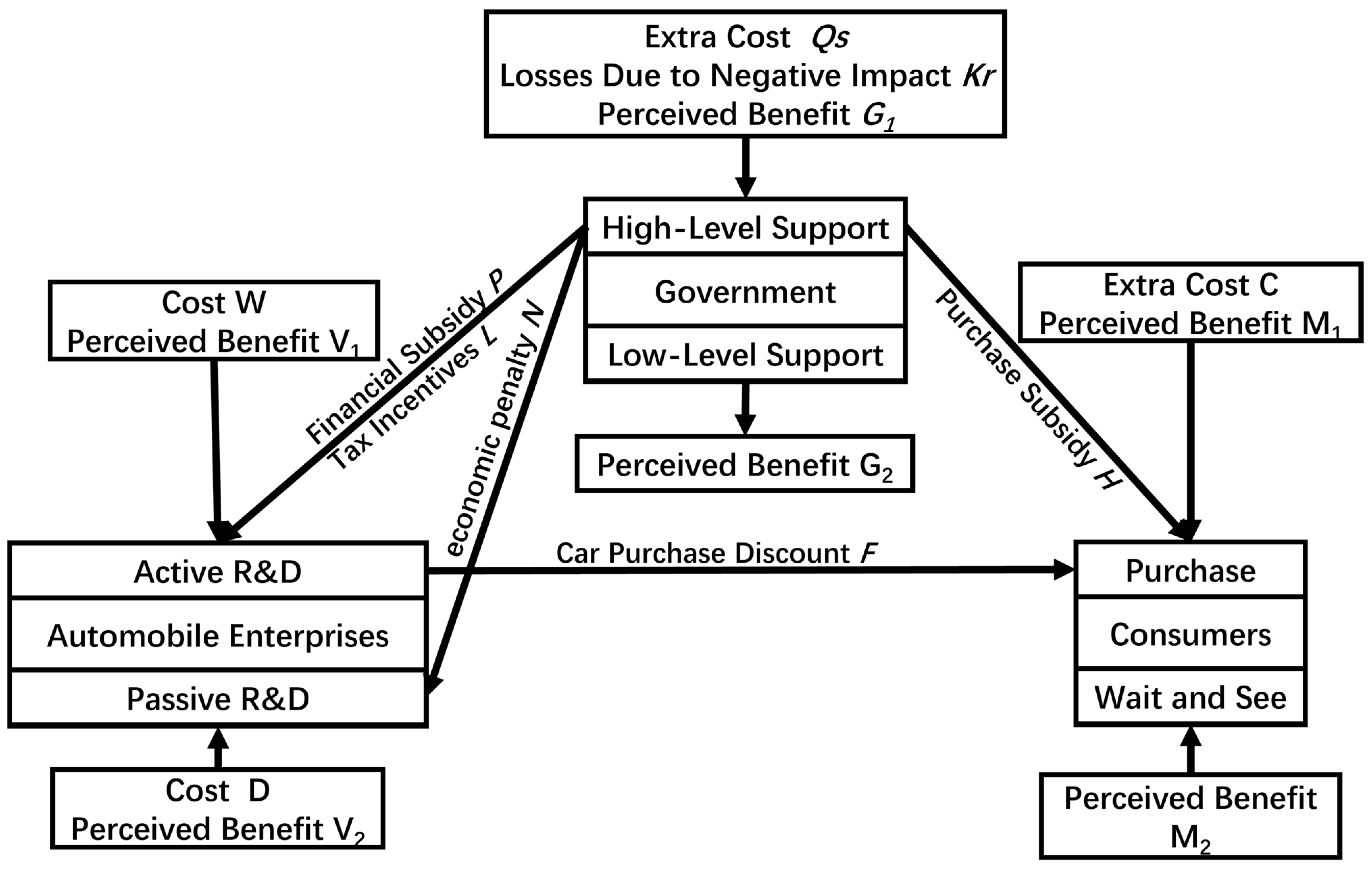
2.1. Description of the Problem
2.2. Model Assumptions and Parameter Design
2.3. Game Model Construction and Analysis
- (1)
- Government’s Game Strategy: The expected payoff for choosing the “strong support” strategy is U11, and the expected payoff for choosing the “weak support” strategy is U12. The average expected payoff is U1, such that
- (2)
- Car Manufacturer’s Game Strategy: The expected payoff for choosing the “proactive” strategy is U21, and the expected payoff for choosing the “passive” strategy is U22. The average expected payoff is U2, such that
- (3)
- Consumer’s Game Strategy: The expected payoff for choosing the “purchase” strategy is U31, and the expected payoff for choosing the “wait-and-see” strategy is U32. The average expected payoff is U3, such that
2.4. Game Model Solving and Analysis
2.4.1. Single-Agent Stability Analysis
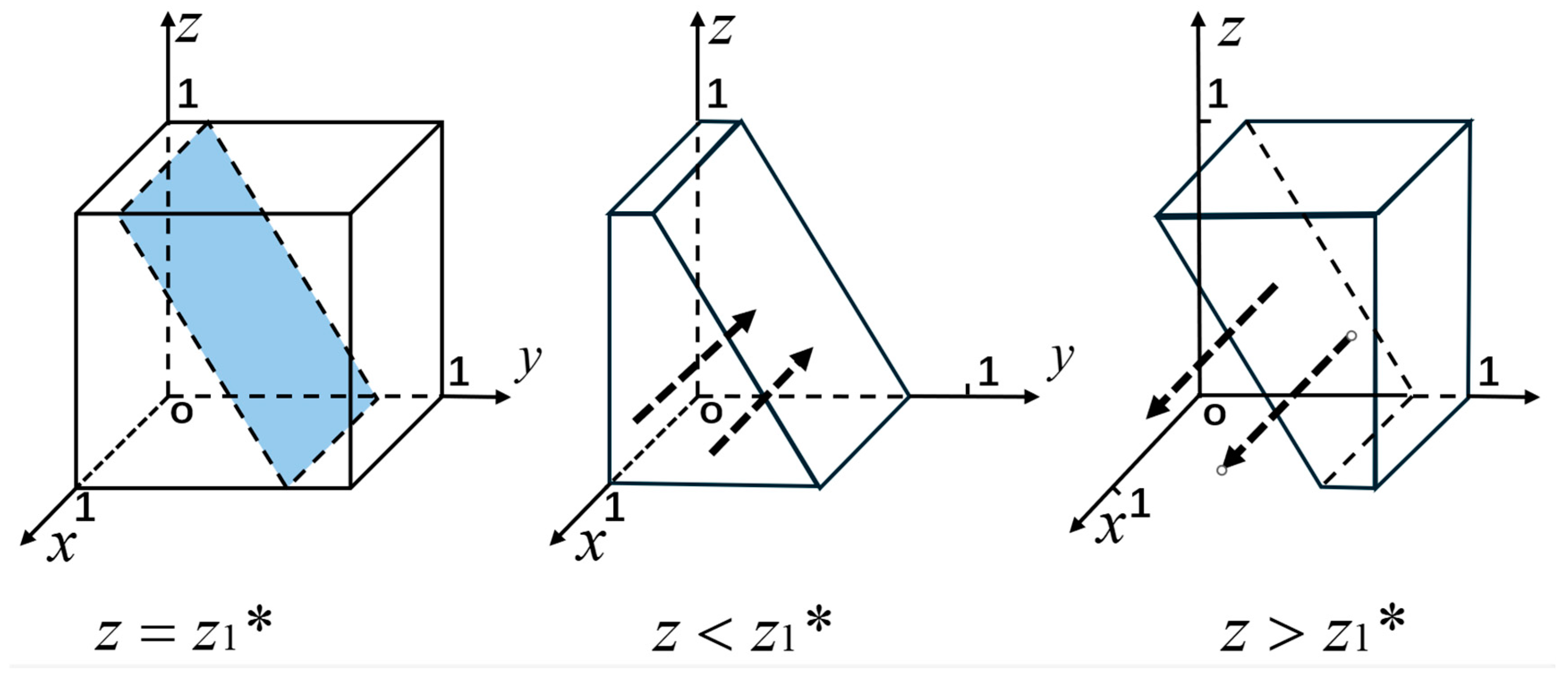
Government’s Strategy Stability Analysis
- (1)
- When is the case, and hold true, and takes any value within the range; it is always a stable state—the probability of the government’s strategic choice, , remains unchanged over time. The government may experience a period of temporary instability and will subsequently evolve toward a direction of high support or low support based on changes in external conditions.
- (2)
- When is the case, , and along with ; therefore, is an evolutionarily stable strategy.
- (3)
- When is the case, , and along with ; therefore, is an evolutionarily stable strategy.
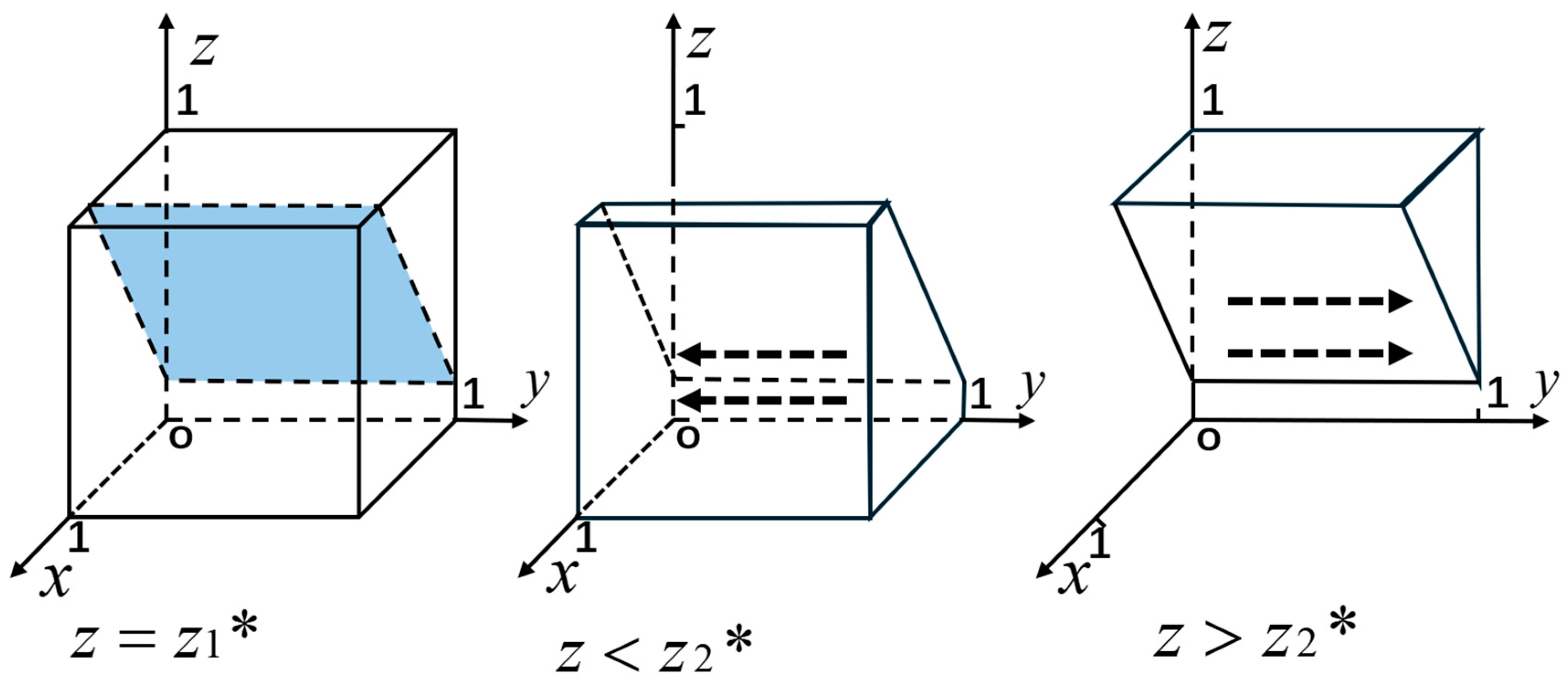
Automobile Manufacturers’ Strategy Stability Analysis
- (1)
- When is the case, and hold true, and takes any value within the range; it is always a stable state—the probability of the automobile manufacturer’s strategic choice, , remains unchanged over time.
- (2)
- When is the case, , and along with ; therefore, is an evolutionarily stable strategy.
- (3)
- When is the case, , and along with ; therefore, is an evolutionarily stable strategy.
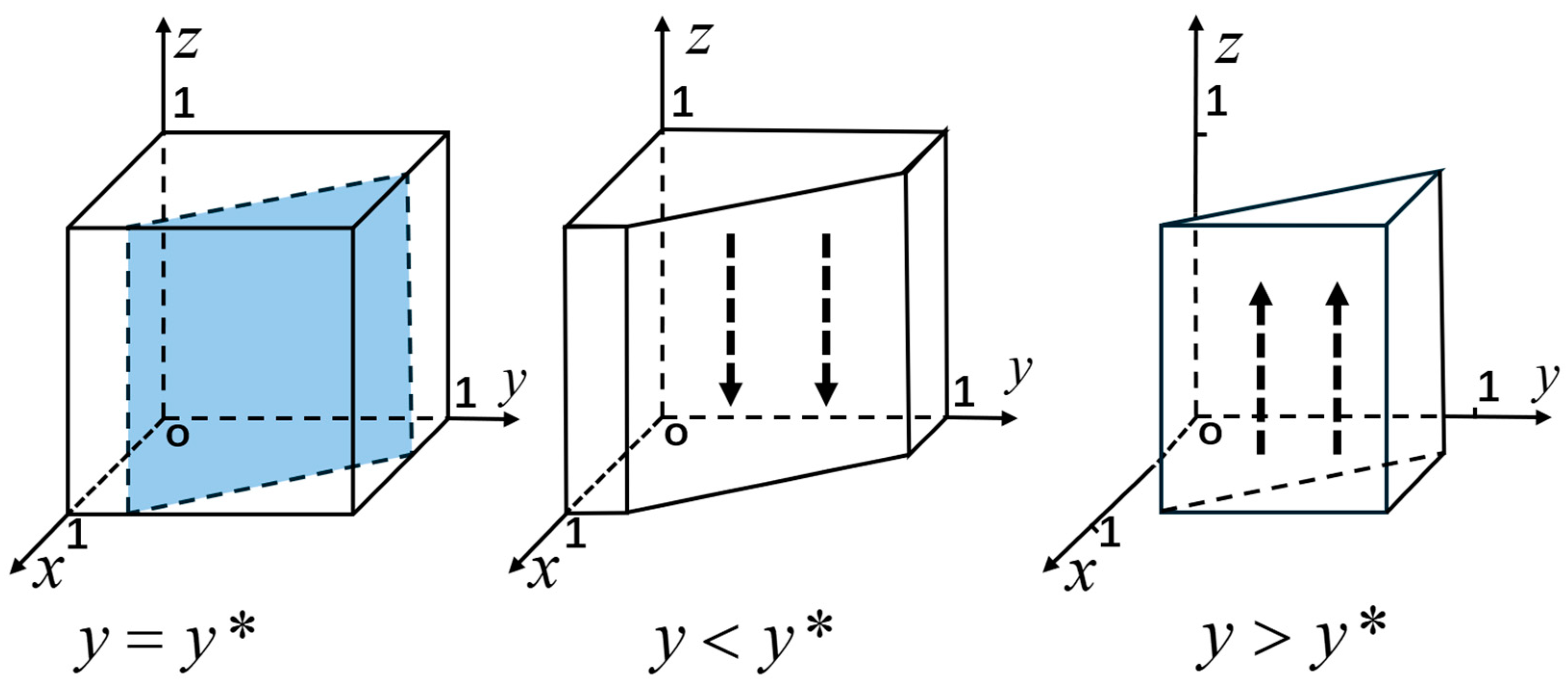
Consumers’ Strategy Stability Analysis
- (1)
- When is the case, and hold true, and takes any value within the range; it is always a stable state—the probability of the consumer’s strategic choice, , remains unchanged over time.
- (2)
- When is the case, , and along with ; therefore, is an evolutionarily stable strategy.
- (3)
- When is the case, , and along with ; therefore, is an evolutionarily stable strategy.
2.4.2. Stability Analysis of Strategy Combination
3. Numerical Simulation
3.1. The Effect of the Initial Value of the Decision
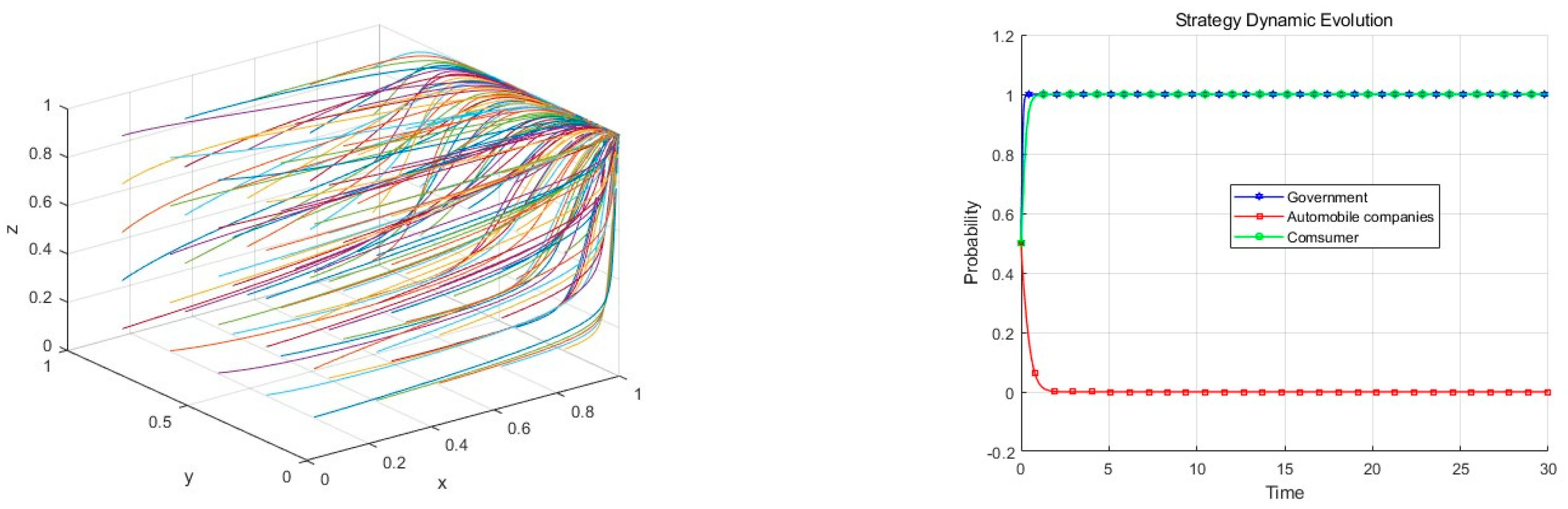
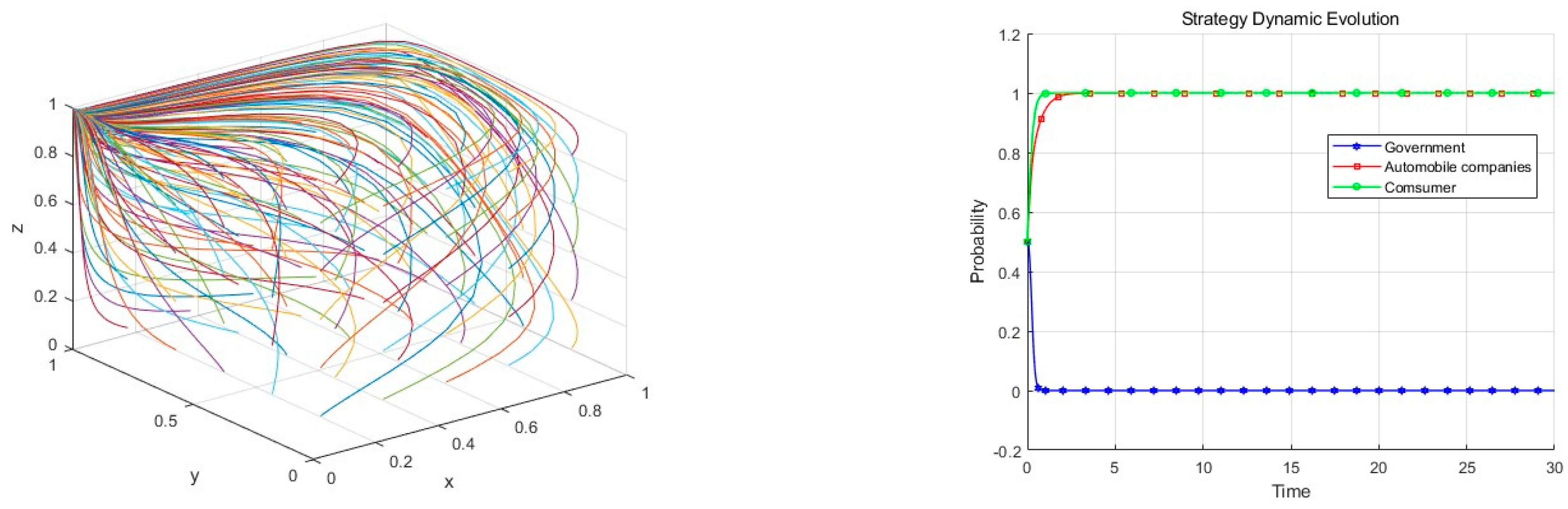
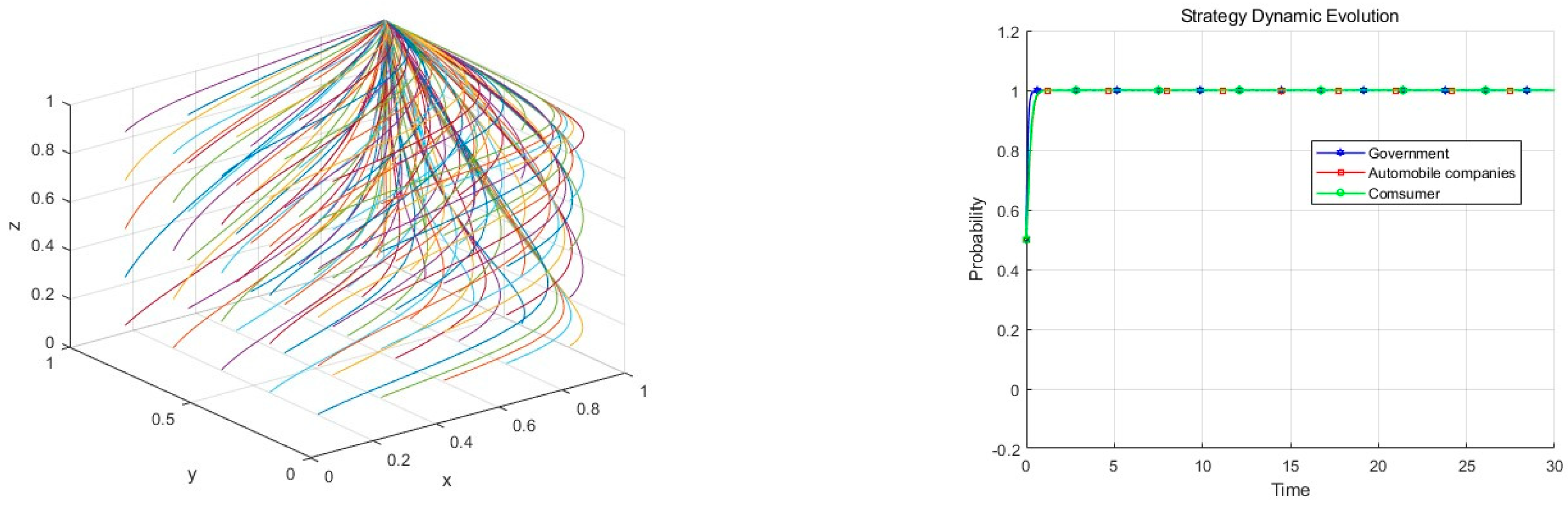
3.2. The Influence of Key Parameters on Evolution
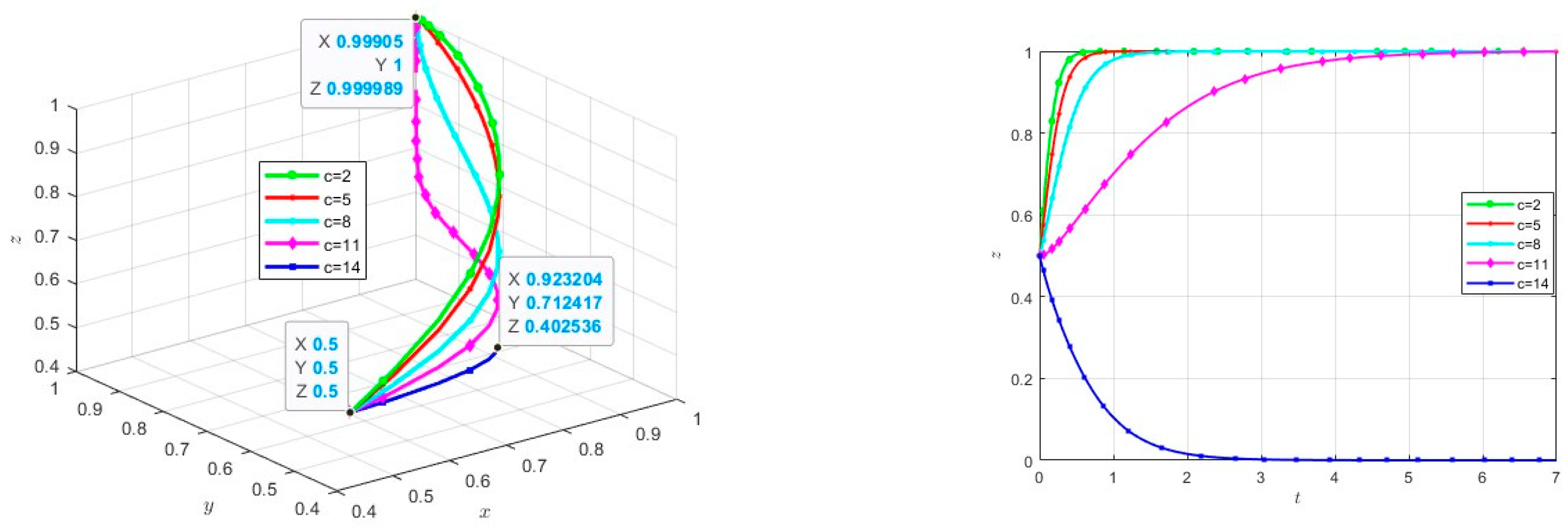
3.2.1. The Influence of C
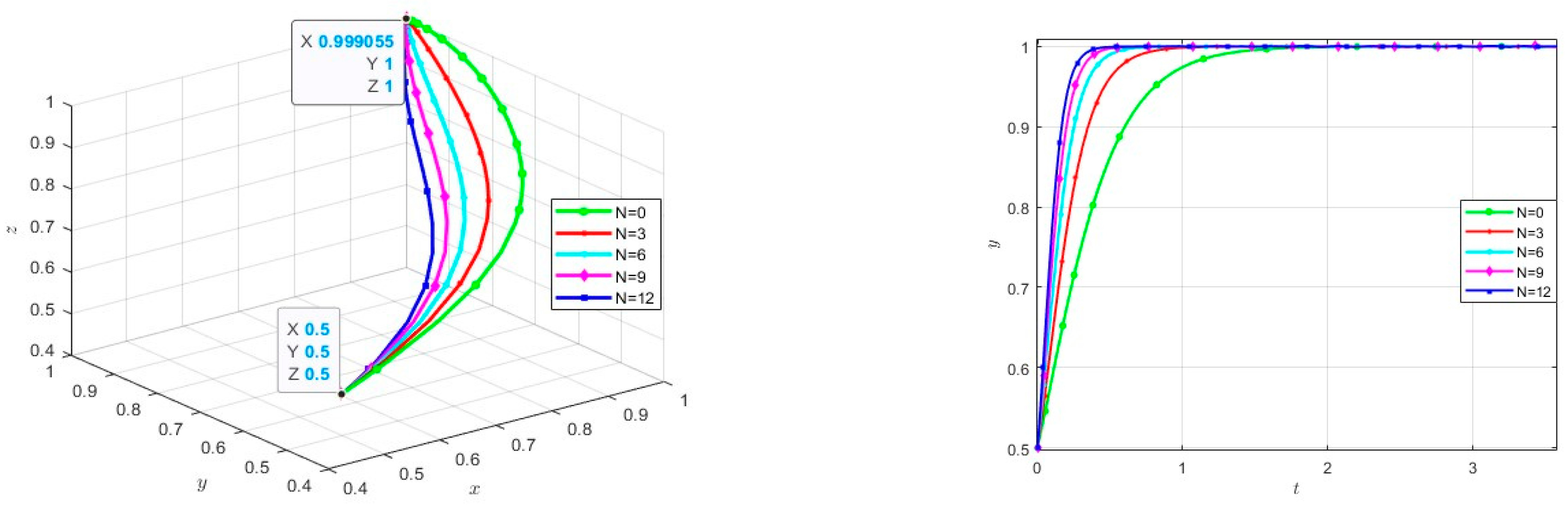
3.2.2. The Influence of N
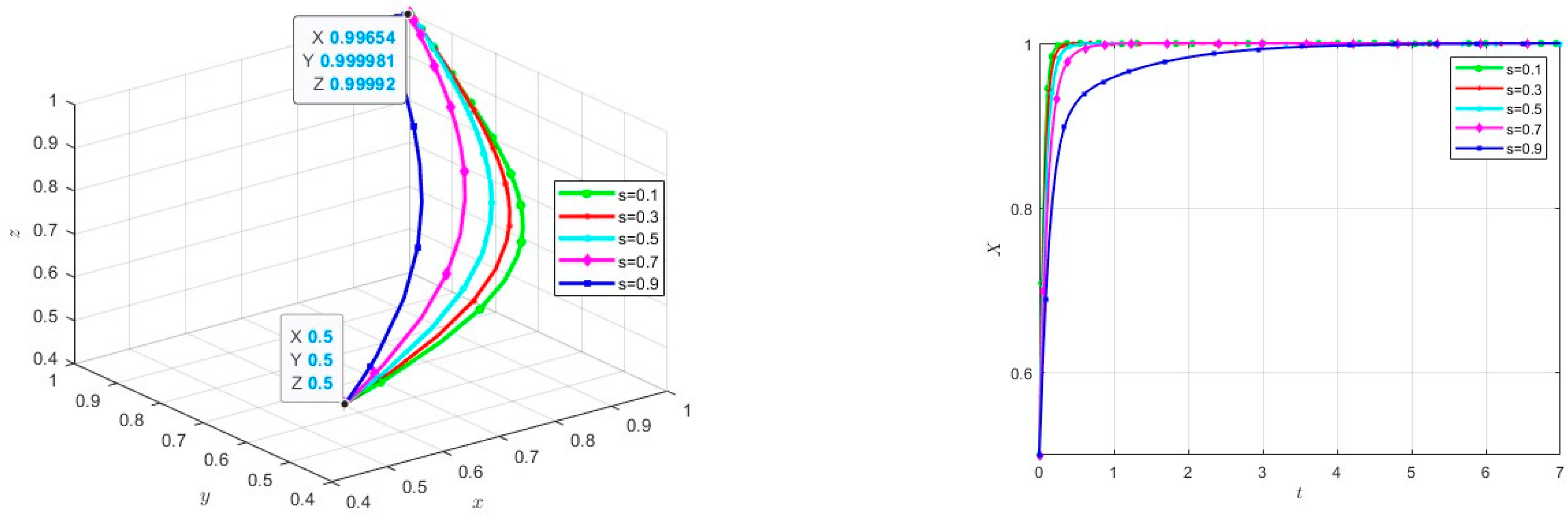
3.2.3. The Influence of s
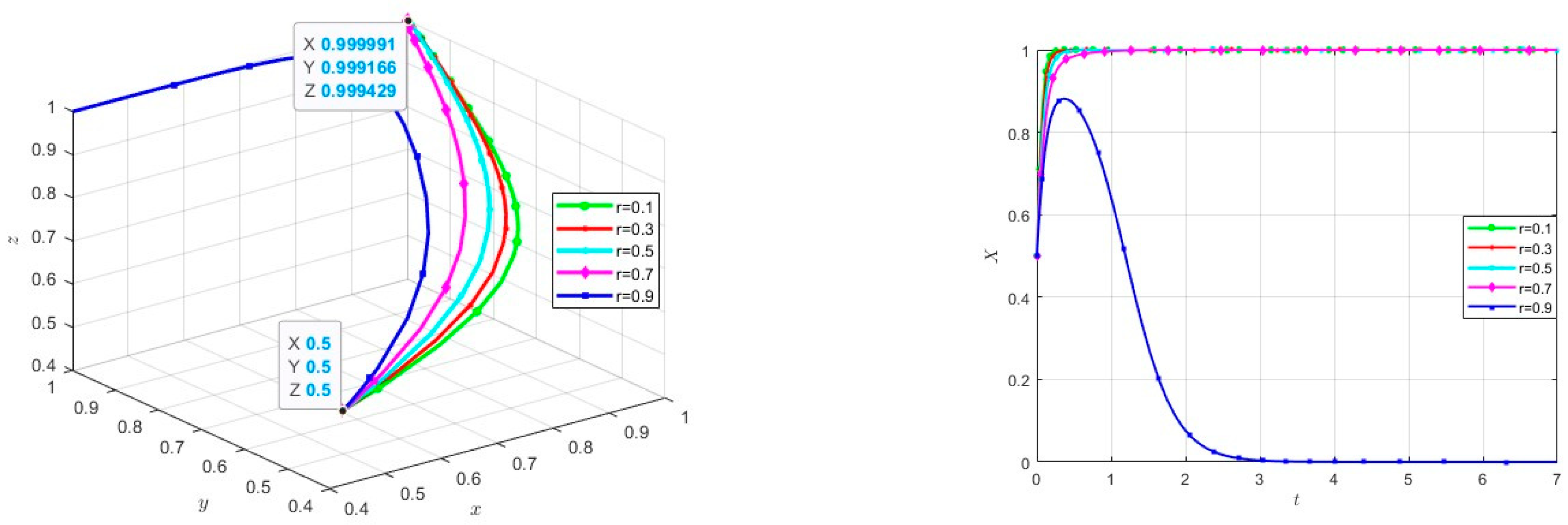
3.2.4. The Influence of r
4. Conclusions and Implications
- (1)
- The system’s strategic optimum can be achieved under the conditions of strong government support, proactive R&D by car manufacturers, and consumer purchasing.
- (2)
- The government’s support has a significant positive feedback effect on the enthusiasm of car manufacturers for R&D and the willingness of consumers to purchase. It is necessary to increase government support, strengthen the confidence of car manufacturers, formulate long-term stable policies, and encourage them to continue technological innovation.
- (3)
- The enthusiasm of car manufacturers for R&D is subject to the constraints of the negative impact coefficient. Therefore, the government should establish a risk mitigation mechanism to reduce negative impacts. This measure can effectively reduce the R&D risks faced by car manufacturers, motivate them to increase R&D investment, and promote technological development.
- (4)
- The willingness of consumers to purchase is influenced by both government support and the market environment. Therefore, when promoting the marketization of autonomous vehicles, the government should consider various factors comprehensively and use multiple means to enhance consumer confidence and willingness to purchase, such as strengthening the formulation and supervision of technical standards, enhancing market promotion efforts, and providing purchase subsidies.
5. Limitations and Future Research Directions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- General Office of the State Council. New Energy Vehicle Industry Development Plan (2021–2035). Available online: http://www.gov.cn/zhengce/content/2020-11/02/content_5556716.htm (accessed on 25 August 2024).
- Huo, Z.; Liu, G.; Fan, Z. Research on the Mechanism of Public Adoption of Emerging Technologies in China—Micro Evidence from a Social Experiment Survey on Autonomous Vehicles. Stud. Sci. Sci. 2024, 1–20. [Google Scholar] [CrossRef]
- Li, J.; He, Y.; Sun, C.; Peng, J.; Chen, T. Acceptance Model and Risk Analysis of Autonomous Vehicles Based on SEM. Traffic Inf. Secur. 2021, 39, 26–34. [Google Scholar]
- Qin, H.; Zhang, R.; Wang, P. Differences in Autonomous Vehicle User Acceptance Between China and the U.S. Sci. Technol. Eng. 2021, 21, 6487–6493. [Google Scholar]
- Leung, Y.N. Understanding Passenger Acceptance of Autonomous Vehicles Through the Prism of the Trolley Dilemma. Int. J. Hum. Comput. Interact. 2024, 40, 2185–2194. [Google Scholar]
- Guan, J.; Du, X.; Zhang, J.; Maymin, P.; DeSoto, E.; Langer, E.; He, Z. Private vehicle drivers acceptance of autonomous vehicles: The role of trait mind-fulness. Transp. Policy 2024, 149, 211–221. [Google Scholar]
- Yoo, S.; Kumagai, J.; Kawabata, Y.; Keeley, A.R.; Managi, S. Buy and/or Pay Disparity: Evidence from Fully Autonomous Vehicles. Appl. Sci. 2024, 14, 410. [Google Scholar] [CrossRef]
- Fei, W.; Zhentai, Z.; Shoufu, L. Purchase intention of Autonomous vehicles and industrial Policies: Evidence from a national survey in China. Transp. Res. Part A 2023, 173, 103719. [Google Scholar]
- Xu, M.; Mao, W.; Shepherd, S.; Harrison, G.; Xu, M. Research on the Development of the Autonomous Vehicle Market in Beijing Based on System Dynamics. Syst. Sci. Math. 2024, 179, 103889. Available online: http://kns.cnki.net/kcms/detail/11.2019.o1.20240709.1633.004.html (accessed on 26 August 2024).
- Kaltenhäuser, B.; Werdich, K.; Dandl, F.; Bogenberger, K. Market development of autonomous driving in Germany. Transp. Res. Part A 2020, 132, 882–910. [Google Scholar]
- Huo, Z.; Liu, G. China’s Practice of Autonomous Vehicle Industrialization in the Context of Intelligent Transformation. Forum Sci. Technol. China 2024, 95–109. [Google Scholar] [CrossRef]
- Zhang, X.; Lu, Y.; Gao, X.; Huang, Y.; Liu, H.; Li, J. Cooperative Perception Technology and Development Trends for Intelligent and Connected Vehicles. Acta Autom. Sin. 2024, 50, 1–16. [Google Scholar] [CrossRef]
- Li, Q.; Shen, T. Analysis of the Development Status and Trends of Autonomous Vehicles Abroad. New Mater. Ind. 2020, 51–53. [Google Scholar] [CrossRef]
- Feng, Q.; Wu, S.; Wang, Y.; Kang, K. Research on the Current Status and Development Suggestions for the Construction of Intelligent and Connected Vehicle Testing Zones in China. Automot. Ind. Res. 2023, 1, 34–41. [Google Scholar]
- Qiuju, X.; Meng, X.; Caroline, M. Governance of Emerging Autonomous Driving Development in China. Transp. Res. Rec. 2020, 2674, 281–290. [Google Scholar]
- Shi, J.; He, M. Evolutionary Strategy Research on Platform Empowerment of SMEs’ Digital Transformation under Government Subsidies. Nankai Econ. Stud. 2024, 7, 22–43. [Google Scholar]
- Li, C.; Song, Y.; Wang, J.; An, X. Collaborative Development Model of China-Europe Railway Express under Government Incentive Mechanisms. J. Southwest Jiaotong Univ. 2024, 16, 8167. [Google Scholar]
- Jiang, X.; Zheng, W.; Ma, B. Evolutionary Game and Simulation Research on Anti-Monopoly of Digital Platforms under Different Incentive Mechanisms. Syst. Sci. Math. 2024, 44, 2213–2235. [Google Scholar]
- Wu, H.; Huang, Y.; Liu, G.; Luo, L.; Luo, Y. Synergizing stakeholder collaboration for value co-creation in China’s prefabricated decoration diffusion: A tripartite evolutionary game perspective. Heliyon 2024, 10, e34775. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.H.; Ling, D.; Yang, Q.X.; Feng, Y.C.; Xiu, J. Central environmental protection inspection and carbon emission reduction: A tripartite evolutionary game model from the perspective of carbon neutrality. Pet. Sci. 2023, 21, 2139–2153. [Google Scholar] [CrossRef]
- Wang, W.; Hao, S.; Zhong, H.; Sun, Z. How to promote carbon emission reduction in buildings? Evolutionary analysis of government regulation and financial investment. J. Build. Eng. 2024, 89, 109279. [Google Scholar] [CrossRef]
- Tang, L.; Qing, S.; Xu, Z.; Zhou, H. A Review of Public Acceptance of Autonomous Vehicles. J. Transp. Eng. 2020, 20, 131–146. [Google Scholar]
- Xu, L.; Lu, Y.; Sun, Z.; Li, H. Personalized User Research Based on the Acceptance of Autonomous Vehicles. Packag. Eng. 2023, 44, 42–58. [Google Scholar]
- Yuen, K.F.; Wong, Y.D.; Ma, F.; Wang, X. The determinants of public acceptance of autonomous vehicles: An innovation diffusion perspective. J. Clean. Prod. 2020, 270, 121904. [Google Scholar] [CrossRef]
- Chen, S.; Wang, H.; Meng, Q. Designing autonomous vehicle incentive program with uncertain vehicle purchase price. Transp. Res. Part C 2019, 103, 226–245. [Google Scholar] [CrossRef]
- Tang, T.; Wang, X.; Wu, J.; Yuan, M.; Guo, Y.; Xu, X. Determinants and the Moderating Effects of Individual Characteristics on Autonomous Vehicle Adoption in China. Int. J. Environ. Res. Public Health 2023, 20, 43. [Google Scholar] [CrossRef]
- Cui, X.; Zhao, S. Willingness to Use Fully Autonomous Vehicles Considering Refined User Groups. J. Dalian Univ. Technol. 2022, 62, 476–484. [Google Scholar]
- Chu, H.; Hu, F.; Wang, Y.; Peng, Y.; Zhao, L. The Impact of Individual Empathy on Willingness to Accept Autonomous Vehicles with Different Moral Behavior Orientations. Appl. Psychol. 2024, 30, 203–210. [Google Scholar]
- Gill, T. Ethical dilemmas are really important to potential adopters of autonomous vehicles. Ethics Inf. Technol. 2021, 23, 657–673. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, J. Elderly Acceptance of Autonomous Vehicles in the Context of the Digital Divide. J. Transp. Syst. Eng. Inf. 2023, 23, 168–175. [Google Scholar]
- Wang, L. Research on Public Acceptance of Autonomous Vehicles Based on Trust and Perceived Value. Beijing Jiaotong University: Beijing China, 2022. [Google Scholar] [CrossRef]
- Ye, X.; Sui, X.; Wang, T.; Yan, X.; Chen, J. Research on parking choice behavior of shared autonomous vehicle services by measuring users’ intention of usage. Transp. Res. Part F Psychol. Behav. 2022, 88, 81–98. [Google Scholar] [CrossRef]
- Rahman, M.M.; Deb, S.; Strawderman, L.; Burch, R.; Smith, B. How the older population perceives self-driving vehicles. Transp. Res. Part F Psychol. Behav. 2019, 65, 242–257. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.; Tang, L. Modeling and Analysis of Acceptance of Autonomous Driving by Transportation Practitioners. J. Transp. Eng. Inf. 2023, 21, 42–54. [Google Scholar]
- Jing, P.; Wang, W.; Wu, L. Study on the Acceptance of Autonomous Vehicles by the Elderly. China J. Highw. Transp. 2021, 34, 158–171. [Google Scholar]
- Meng, L.; Liu, K.; He, J.; Han, C.; Liu, P. Carbon emission reduction behavior strategies in the shipping industry under government regulation: A tripartite evolutionary game analysis. J. Clean. Prod. 2022, 378, 134556. [Google Scholar] [CrossRef]
- Selten, R. A note on evolutionarily stable strategies in asymmetric animal conflicts. J. Theor. Biol. 1980, 84, 93–101. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Entity | Parameter | Meaning |
|---|---|---|
| Government | Q | The additional cost incurred by the government when implementing strong policy support compared to weak support (including new infrastructure) |
| P | The financial subsidies provided by the government to car manufacturers under strong policy support | |
| H | The purchase subsidies provided by the government to consumers under strong policy support | |
| L | The tax incentives offered by the government to car manufacturers actively engaged in R&D | |
| s | The government’s preference coefficient for technological innovation in car manufacturers (0 < s ≤ 1) | |
| N | The economic penalty imposed by the government on enterprises that do not actively engage in R&D under strong support | |
| K | The loss caused by the negative impact of accidents during the active R&D of autonomous vehicles by manufacturers under strong support | |
| r | The coefficient of negative impact (0 < r ≤ 1) | |
| G1 | The additional perceived benefit obtained by the government from implementing strong policy support for autonomous vehicles compared to weak support | |
| G2 | The perceived benefit obtained by the government from implementing weak policy support for autonomous vehicles | |
| X | The probability of the government choosing to implement strong policy support | |
| Car Manufacturers | W | The cost of actively producing and selling autonomous vehicles |
| D | The cost of passively producing and selling autonomous vehicles | |
| F | The additional discounts offered to consumers in the active sale of autonomous vehicles | |
| V1 | The perceived benefits obtained by car manufacturers from actively selling autonomous vehicles | |
| V2 | The perceived benefits obtained by car manufacturers from maintaining the production of traditional vehicles (V1 > V2) | |
| Y | The probability of car manufacturers choosing to develop autonomous vehicles | |
| Consumers | C | The additional cost for consumers to purchase autonomous vehicles compared to traditional vehicles |
| M1 | The perceived benefit obtained by consumers from purchasing autonomous vehicles | |
| M2 | The perceived benefit obtained by consumers who do not purchase autonomous vehicles (M1 > M2) | |
| Z | The probability of consumers choosing to purchase autonomous vehicles |
| Participant Strategy | Consumers (Z) | Consumers (1 − Z) | |
|---|---|---|---|
| Government (X) | Car Manufacturers (Y) | −Q×s – P − K×r + G1 − H − L | −Q×s – P − K×r + G1 − L |
| P + V1 − W + L − F | P + V1 − W + L | ||
| H − C + M1 + F | M2 | ||
| Car Manufacturers (1 − Y) | −Q×s − P + G1 – H − L + N | −Q×s − P + G1 − L + N | |
| P − N + V2 − D | P − N + V2 − D | ||
| H − C + M1 | M2 | ||
| Government (1 − X) | Car Manufacturers (Y) | 0 | 0 |
| V1 − W − F | V1 − W | ||
| −C + M1 + F | M2 | ||
| Car Manufacturers (1 − Y) | 0 | 0 | |
| V2 − D | V2 − D | ||
| −C + M1 | M2 | ||
| Equilibrium Point | Eigenvalues | Stability Condition |
|---|---|---|
| E1 (0, 0, 0) | λ1 = G1 + N − Qs − L − P > 0 | Instability |
| λ2 = D + V1 − V2 − W | ||
| λ3 = M1 − C − M2 > 0 | ||
| E2 (1, 0, 0) | λ1 = Qs − N − G1 + L + P < 0 | Instability |
| λ2 = D + N + V1 − V2 − W + L | ||
| λ3 = H − C + M1 − M2 > 0 | ||
| E3 (0, 1, 0) | λ1 = G1 − Qs − L − Kr − P | Instability |
| λ2 = V2 − V1 − D + W | ||
| λ3 = F − C + M1 − M2 > 0 | ||
| E4 (0, 0, 1) | λ1 = G1 − H + N − Qs − L − P > 0 | Instability |
| λ2 = D − F + V1 − V2 − W | ||
| λ3 = C1 − M1 + M2 < 0 | ||
| E5 (1, 1, 0) | λ1 = Qs − G1 + L + Kr + P | Instability |
| λ2 = V2 − N − V1 − D + W − L | ||
| λ3 = F − C + H + M1 − M2 > 0 | ||
| E6 (1, 0, 1) | λ1 = H − G1 − N + Qs + L + P < 0 | When V1 < F − D + V2 + W − L, ESS |
| λ2 = D − F + N + V1 − V2 − W + L | ||
| λ3 = C − H − M1 + M2 < 0 | ||
| E7 (0, 1, 1) | λ1 = G1 − H − Qs − L − Kr − P | When V1 > F − D + V2 + W and G1 < H + Qs + L + Kr + P, ESS |
| λ2 = F − D − V1 + V2 + W | ||
| λ3 = C − F − M1 + M2 < 0 | ||
| E8 (1, 1, 1) | λ1 = H − G1 + Qs + L + Kr + P | When V1 > F − D + V2 + W − sL and G1 > H + Qs + L + Kr + P, ESS |
| λ2 = F − D − N − V1 + V2 + W − L | ||
| λ3 = C − F − H − M1 + M2 < 0 |
| Parameter | Q | P | H | L | s | N | K | r | G1 | G2 | W | D | F | V1 | V2 | C | M1 | M2 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Value | 20 | 3.5 | 1 | 1.6 | 0.5 | 3 | 30 | 0.5 | 40 | 15 | 25 | 18 | 1 | 20 | 20 | 5 | 20 | 10 |
| Parameter | Q | P | H | L | s | N | K | r | G1 | G2 | W | D | F | V1 | V2 | C | M1 | M2 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Value | 20 | 3.5 | 1 | 1.6 | 0.5 | 3 | 40 | 0.6 | 40 | 15 | 25 | 18 | 1 | 30 | 20 | 5 | 20 | 10 |
| Parameter | Q | P | H | L | s | N | K | r | G1 | G2 | W | D | F | V1 | V2 | C | M1 | M2 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Value | 20 | 3.5 | 1 | 1.6 | 0.5 | 3 | 30 | 0.5 | 40 | 15 | 25 | 18 | 1 | 30 | 20 | 5 | 20 | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mo, C.; Chen, F.; Wang, Z. A Study on Consumers’ Willingness to Purchase Autonomous Vehicles from a Multi-Party Interaction Perspective: A Tripartite Evolutionary Game Model Involving the Government, Automobile Manufacturers, and Consumers. World Electr. Veh. J. 2024, 15, 498. https://doi.org/10.3390/wevj15110498
Mo C, Chen F, Wang Z. A Study on Consumers’ Willingness to Purchase Autonomous Vehicles from a Multi-Party Interaction Perspective: A Tripartite Evolutionary Game Model Involving the Government, Automobile Manufacturers, and Consumers. World Electric Vehicle Journal. 2024; 15(11):498. https://doi.org/10.3390/wevj15110498
Chicago/Turabian StyleMo, Chengcheng, Fujian Chen, and Zeyu Wang. 2024. "A Study on Consumers’ Willingness to Purchase Autonomous Vehicles from a Multi-Party Interaction Perspective: A Tripartite Evolutionary Game Model Involving the Government, Automobile Manufacturers, and Consumers" World Electric Vehicle Journal 15, no. 11: 498. https://doi.org/10.3390/wevj15110498
APA StyleMo, C., Chen, F., & Wang, Z. (2024). A Study on Consumers’ Willingness to Purchase Autonomous Vehicles from a Multi-Party Interaction Perspective: A Tripartite Evolutionary Game Model Involving the Government, Automobile Manufacturers, and Consumers. World Electric Vehicle Journal, 15(11), 498. https://doi.org/10.3390/wevj15110498