
Prediction for the Remaining Useful Life of Lithium–Ion Battery Based on RVM-GM with Dynamic Size of Moving Window


Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Data Description
2.2. Relevance Vector Machine
2.2.1. Relevance Vector Regression
2.2.2. Bayesian Inference
2.2.3. Updating Hyper-Parameters and Outputting Prediction Result
2.3. Grey Predictive Model
2.4. RVM-GM Framework Based on Dynamic Window
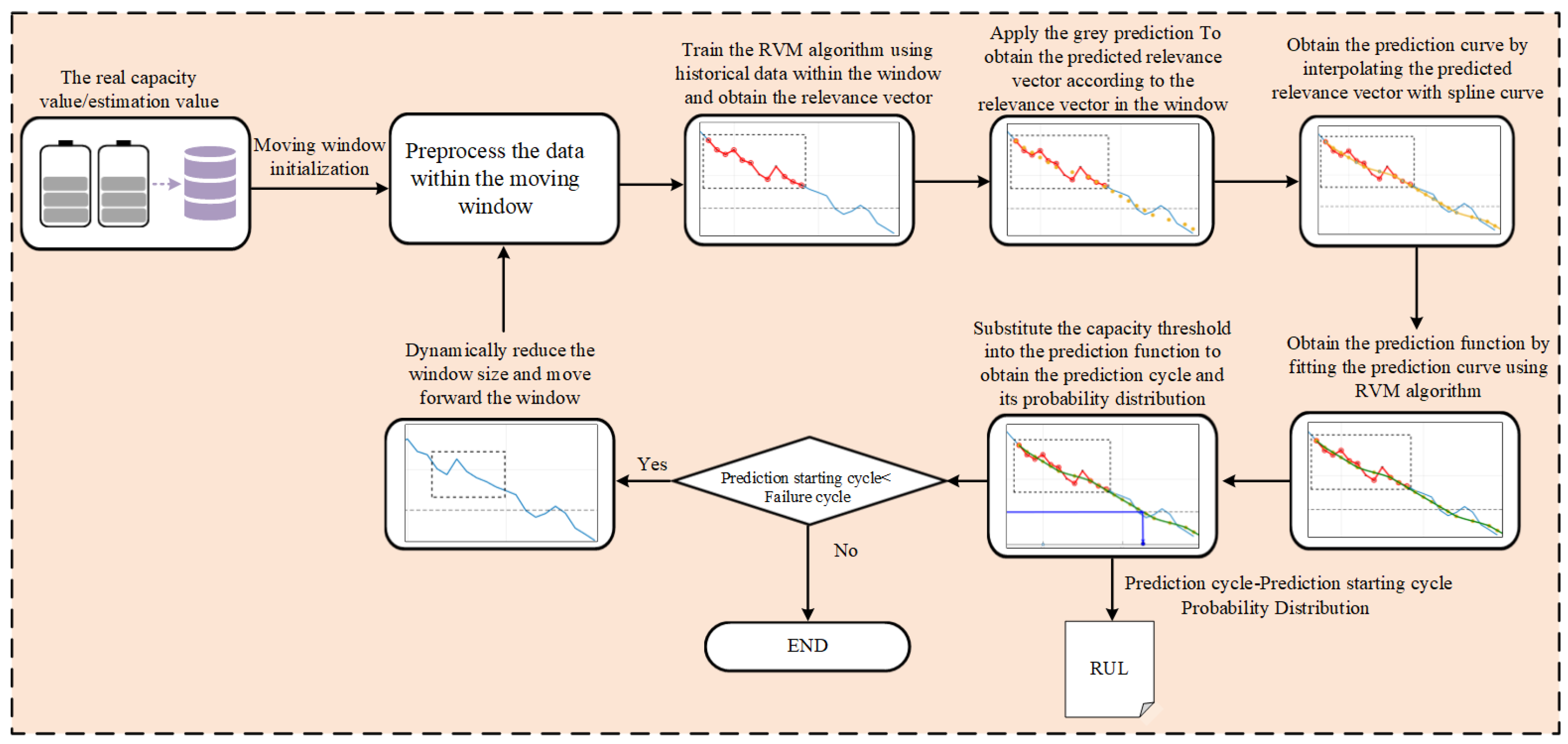
- (1)
- The estimated values or the actually measured capacities of lithium–ion batteries are taken as the capacity history data. The measured capacities obtained from the NASA lithium–ion battery aging experiment datasets are used to train the RVM algorithm.
- (2)
- Initialize the data window size and pre-process the data in the window. The window should be first initialized to select history capacity data. Then, the data in the window need to be preprocessed. If there is a large increment, the capacity sequence after this cycle shall be selected as the capacity historical data.
- (3)
- Train the RVM algorithm with data in the window and save the relevant vector. After preprocessing, the history capacity sequence can be input into the RVM algorithm as a training sample. The relevance vectors representing the history capacity sequence in the window can then be found.
- (4)
- Obtain the prediction trend of the capacity by grey prediction based on the relevance vector saved in (3). Because the capacity displays a decrement trend, the relevance vector reduction is adopted to generate grey data. The obtained predicted data point can be recognized as the relevance vector of the prediction trend curve.
- (5)
- Interpolate all the grey predicted points by spline curve to figure out the full prediction trend curve of the capacity. The relevance vectors in the window and the relevance vectors obtained by grey prediction form a series of characteristic discrete points representing the degradation curve. By means of spline curve interpolation, the existing discrete points are interpolated to obtain a continuous curve.
- (6)
- Refit the prediction trend curve to obtain the predicted function by the RVM algorithm. Combining the advantage that RVM can fit the equation and give the probability output, the curve is refitted to reach a capacity degradation trend curve equation.
- (7)
- Substitute the capacity failure threshold into the predicted function to obtain the predicted cycle and its probability distribution. For a certain lithium–ion battery, 80% of its nominal capacity can be regarded as the failure threshold. The threshold can be substituted into the capacity degradation trend curve equation. The predicted RUL can be expressed as , where is the current RUL value, is the predicted cycle corresponding to the capacity degradation threshold and is the current predicted starting point.
- (8)
- Dynamically reduce the window size and move the window forward for circular prediction. Before the next cycle, the predicted starting point needs to be examined. If the point is smaller than the predicted failure cycle, then dynamically reduce the window size, move the window forward with a certain step length, and go back to (2) for the next prediction. Otherwise, it is considered that the point has exceeded the predicted failure cycle and the operation ends.
3. Results
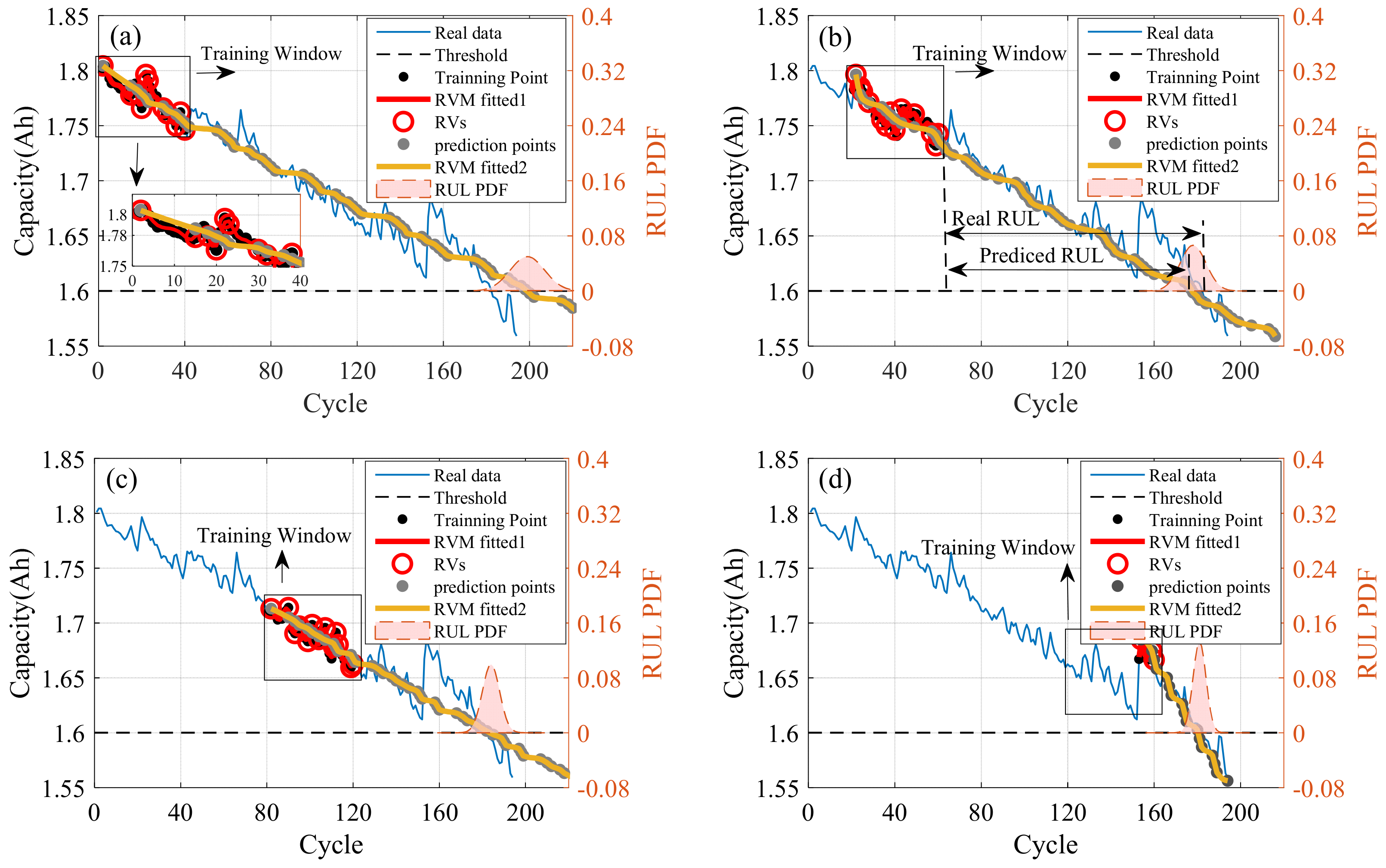
3.1. Experiment on No. 36 Battery with Window Size 40
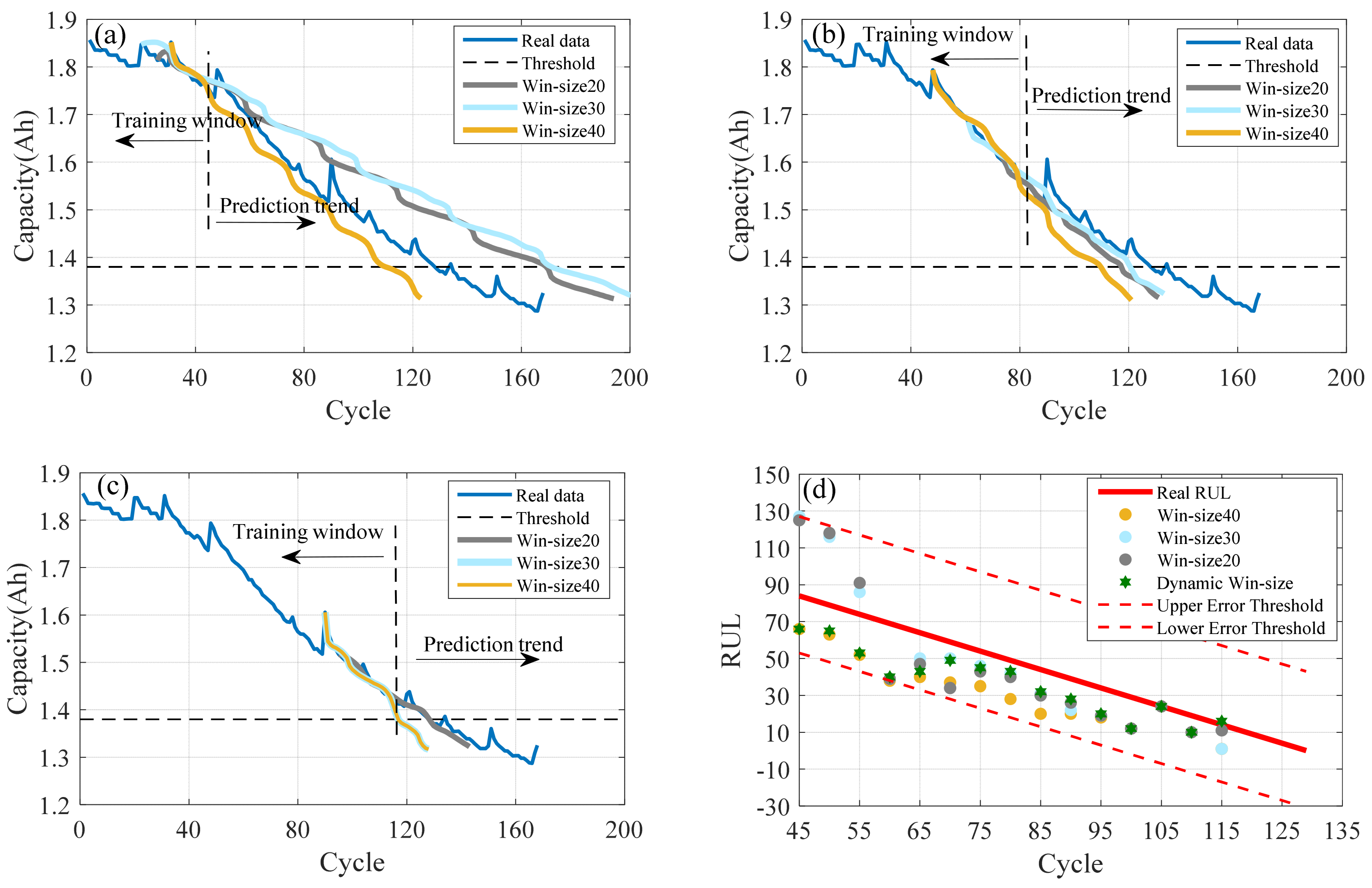
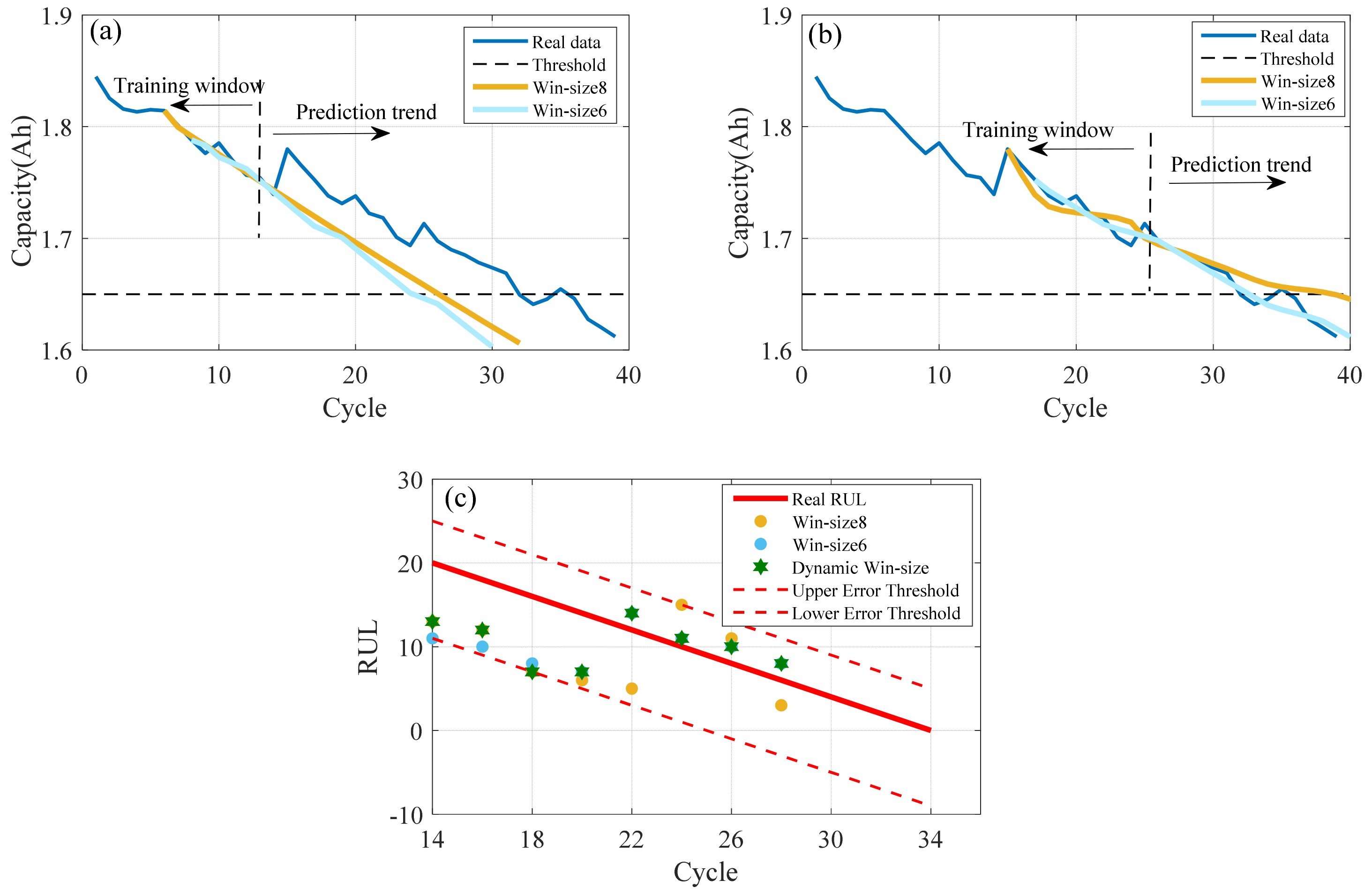
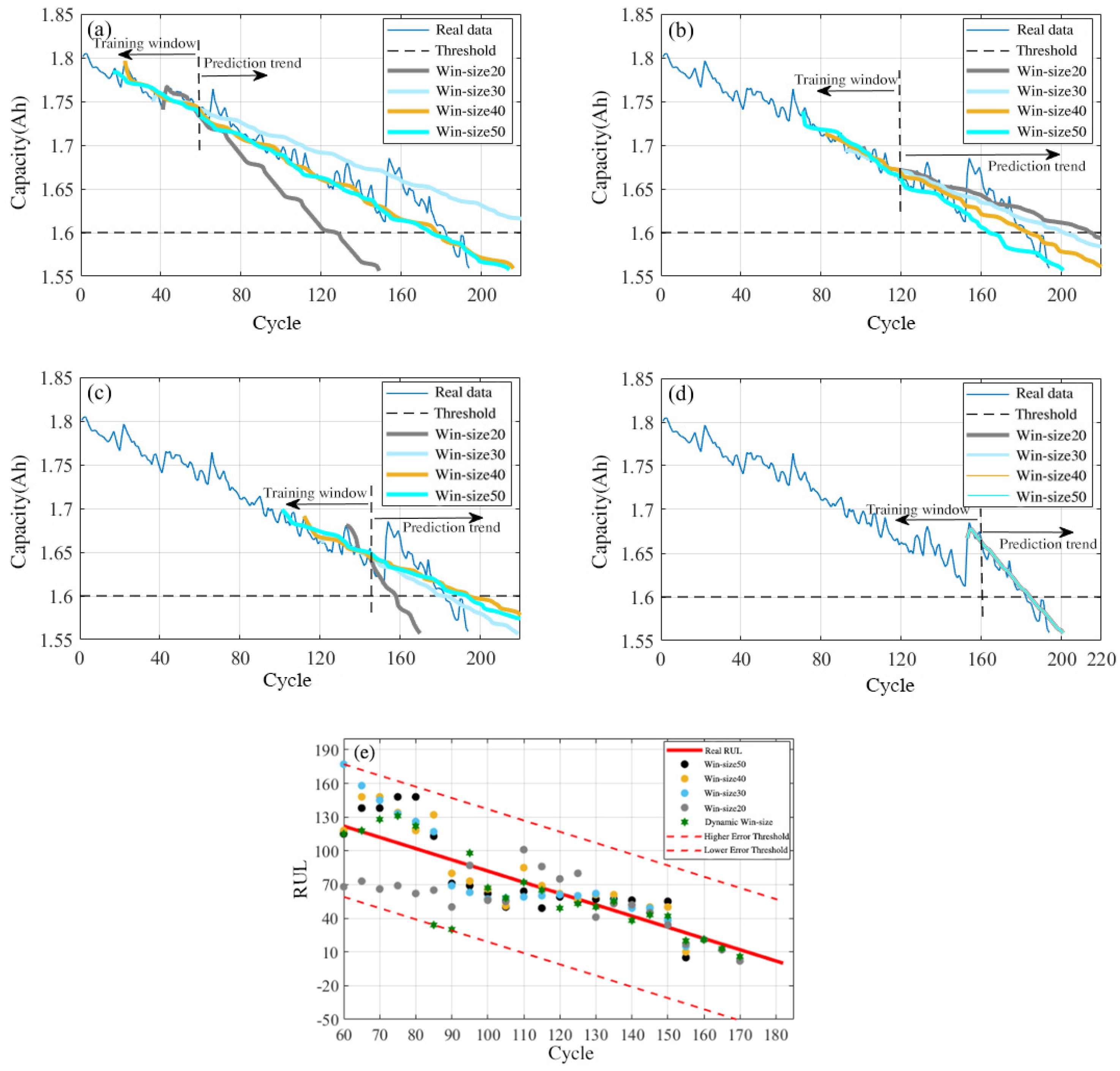
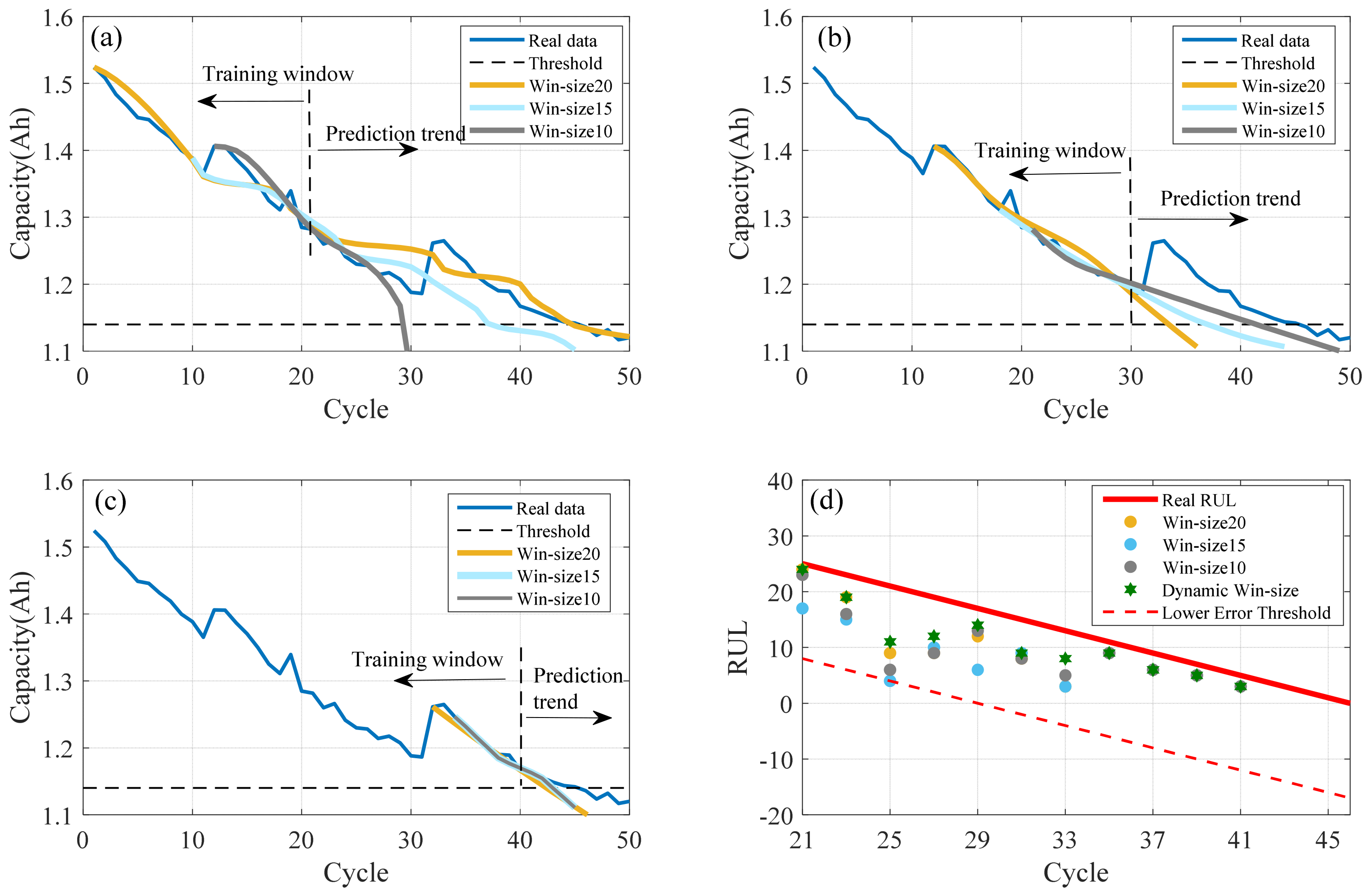
3.2. Experiment on No. 05/No. 32/No. 36/No. 47 with Dynamic Window Size
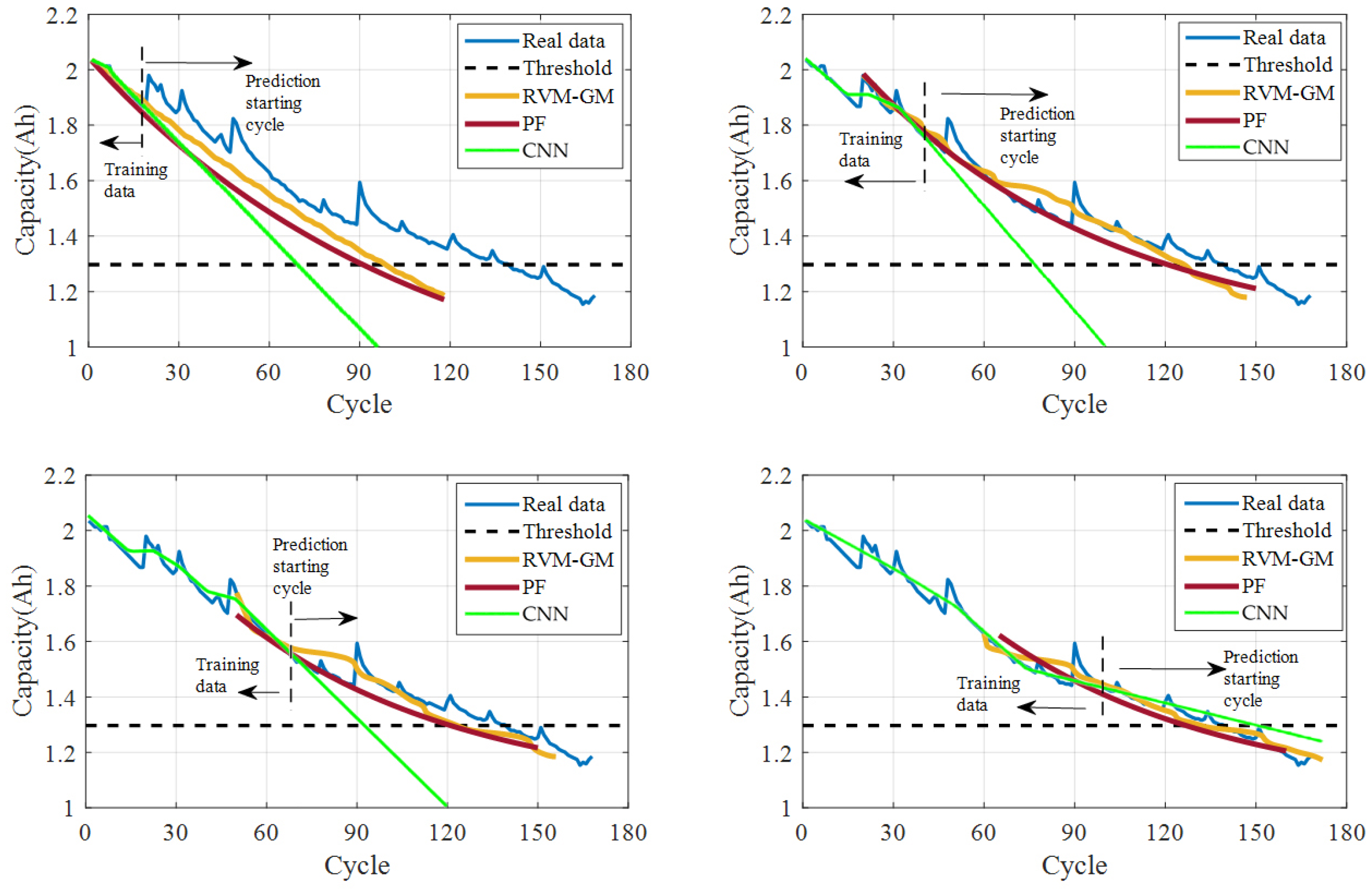
3.3. Algorithm Comparison
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Battery | PredictionStarting Cycle | Win_Size_40 | Win_Size_30 | Win_Size_20 | Dynamic Win_Size | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Prediction | Error | 95% Confidence Bound | Prediction | Error | 95% Confidence Bound | Prediction | Error | 95% Confidence Bound | Prediction | Error | 95% Confidence Bound | ||
| #5 | 45 | 66 | 18 | [52, 80] | 127 | 43 | [110, 154] | 125 | 41 | [95, 155] | 66 | 18 | [52, 80] |
| 50 | 63 | 16 | [47, 79] | 116 | 37 | [95, 137] | 118 | 39 | [99, 147] | 65 | 14 | [50, 80] | |
| 55 | 52 | 22 | [39, 65] | 86 | 12 | [71, 101] | 91 | 17 | [66, 116] | 53 | 21 | [37, 69] | |
| 60 | 38 | 31 | [23, 53] | 39 | 30 | [20, 58] | 39 | 30 | [14, 54] | 40 | 29 | [25, 55] | |
| 65 | 40 | 24 | [28, 52] | 50 | 14 | [34, 66] | 47 | 17 | [27, 67] | 43 | 21 | [26, 60] | |
| 70 | 37 | 22 | [23, 51] | 50 | 9 | [36, 64] | 34 | 25 | [14, 54] | 49 | 10 | [37, 61] | |
| 75 | 35 | 19 | [24, 46] | 46 | 8 | [34, 58] | 43 | 11 | [28, 58] | 45 | 9 | [32, 58] | |
| 80 | 28 | 21 | [16, 40] | 42 | 7 | [32, 52] | 40 | 9 | [28, 52] | 43 | 6 | [33, 53] | |
| 85 | 20 | 24 | [10, 30] | 31 | 13 | [19, 43] | 30 | 14 | [16, 44] | 32 | 12 | [20, 44] | |
| 90 | 20 | 19 | [2, 38] | 22 | 17 | [12, 32] | 26 | 13 | [14, 38] | 28 | 11 | [18, 38] | |
| 95 | 18 | 16 | [5, 31] | 19 | 15 | [9, 29] | 19 | 15 | [6, 32] | 20 | 14 | [10, 30] | |
| 100 | 12 | 17 | [2, 32] | 12 | 17 | [2, 22] | 12 | 17 | [2, 22] | 12 | 17 | [0, 24] | |
| 105 | 24 | 0 | [16, 32] | 24 | 0 | [18, 30] | 24 | 0 | [19, 29] | 24 | 0 | [16, 32] | |
| 110 | 10 | 9 | [4, 16] | 10 | 9 | [3, 17] | 10 | 9 | [3, 17] | 10 | 9 | [2, 18] | |
| 115 | 1 | 13 | [0, 10] | 1 | 13 | [0, 12] | 11 | 3 | [6, 16] | 16 | 2 | [11, 21] | |
| MAE | 18.1 | 16.3 | 17.3 | 12.9 | |||||||||
| RMSE | 19.3 | 19.8 | 20.8 | 14.8 | |||||||||
| STD | 7.2 | 11.7 | 11.9 | 7.6 | |||||||||
| MAPE | 17% | 13% | 14% | 11% | |||||||||
| Battery | Prediction Starting Cycle | Win_Size_8 | Win_Size_6 | Dynamic Win_Size | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Prediction | Error | 95% Confidence Bound | Prediction | Error | 95% Confidence Bound | Prediction | Error | 95% Confidence Bound | ||
| #32 | 14 | 13 | 7 | [3, 23] | 11 | 9 | [2, 20] | 13 | 7 | [3, 23] |
| 16 | 12 | 6 | [2, 22] | 10 | 8 | [2, 18] | 12 | 6 | [2, 22] | |
| 18 | 7 | 9 | [1, 13] | 8 | 8 | [2, 14] | 7 | 9 | [1, 13] | |
| 20 | 6 | 8 | [0, 12] | 7 | 7 | [2, 12] | 7 | 7 | [2, 12] | |
| 22 | 5 | 7 | [1, 9] | 14 | 2 | [9, 19] | 14 | 2 | [9, 19] | |
| 24 | 15 | 5 | [10, 25] | 11 | 1 | [7, 15] | 11 | 1 | [7, 15] | |
| 26 | 11 | 3 | [8, 14] | 10 | 2 | [7, 13] | 10 | 2 | [7, 13] | |
| 28 | 3 | 3 | [0, 6] | 8 | 2 | [6, 10] | 8 | 2 | [6, 10] | |
| MAE | 6.0 | 4.9 | 4.5 | |||||||
| RMSE | 6.3 | 5.8 | 5.3 | |||||||
| STD | 2.2 | 3.4 | 3.2 | |||||||
| MAPE | 21% | 18% | 16% | |||||||
| Battery | Prediction Starting Cycle | Win_Size_40 | Win_Size_30 | Win_Size_20 | Dynamic Win_Size | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Prediction | Error | 95% Confidence Bound | Prediction | Error | 95% Confidence Bound | Prediction | Error | 95% Confidence Bound | Prediction | Error | 95% Confidence Bound | ||
| #36 | 60 | 118 | 4 | [96, 140] | 177 | 55 | [155, 199] | 68 | 54 | [49, 87] | 115 | 7 | [99, 131] |
| 70 | 148 | 36 | [128, 168] | 145 | 33 | [125, 165] | 66 | 46 | [48, 84] | 128 | 16 | [113, 143] | |
| 80 | 118 | 16 | [100, 136] | 126 | 24 | [109, 143] | 62 | 40 | [46, 78] | 122 | 20 | [110, 134] | |
| 90 | 71 | 21 | [58, 84] | 62 | 30 | [49, 75] | 61 | 31 | [46, 76] | 72 | 20 | [62, 82] | |
| 100 | 85 | 3 | [73, 97] | 59 | 23 | [48, 70] | 101 | 19 | [90, 112] | 72 | 10 | [64, 80] | |
| 120 | 61 | 1 | [51, 71] | 62 | 0 | [52, 72] | 41 | 21 | [33, 49] | 50 | 12 | [45, 55] | |
| 140 | 50 | 8 | [44, 56] | 38 | 4 | [30, 46] | 34 | 8 | [29, 39] | 42 | 0 | [37, 47] | |
| 160 | 2 | 20 | [0, 5] | 2 | 20 | [0, 3] | 2 | 20 | [0, 6] | 6 | 16 | [4, 7] | |
| MAE | 13.6 | 23.6 | 29.9 | 12.6 | |||||||||
| RMSE | 17.6 | 28.6 | 33.3 | 14.2 | |||||||||
| STD | 11.2 | 16.1 | 14.7 | 6.4 | |||||||||
| MAPE | 7.3% | 12% | 21% | 7.1% | |||||||||
| Battery | Prediction Starting Cycle | Win_Size_20 | Win_Size_15 | Win_Size_10 | Dynamic Win_Size | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Prediction | Error | 95% Confidence Bound | Prediction | Error | 95% Confidence Bound | Prediction | Error | 95% Confidence Bound | Prediction | Error | 95% Confidence Bound | ||
| #47 | 21 | 24 | 1 | [20, 28] | 17 | 8 | [9, 25] | 23 | 2 | [19, 27] | 24 | 1 | [20, 28] |
| 23 | 19 | 4 | [13, 25] | 15 | 8 | [8, 22] | 16 | 7 | [8, 24] | 19 | 4 | [13, 24] | |
| 25 | 9 | 12 | [4, 14] | 4 | 17 | [0, 12] | 6 | 15 | [0, 18] | 11 | 10 | [4, 18] | |
| 27 | 9 | 10 | [3, 16] | 10 | 9 | [3, 17] | 9 | 10 | [5, 13] | 12 | 7 | [6, 18] | |
| 29 | 12 | 5 | [7, 17] | 6 | 11 | [0, 15] | 13 | 4 | [9, 17] | 14 | 3 | [8, 20] | |
| 31 | 8 | 7 | [3, 13] | 9 | 6 | [4, 14] | 8 | 7 | [3, 13] | 9 | 6 | [4, 14] | |
| 33 | 3 | 10 | [0, 11] | 3 | 10 | [0, 11] | 5 | 8 | [2, 8] | 8 | 5 | [3, 13] | |
| 35 | 9 | 2 | [4, 14] | 9 | 2 | [4, 14] | 9 | 2 | [4, 14] | 9 | 2 | [4, 14] | |
| 37 | 6 | 3 | [2, 10] | 6 | 3 | [2, 10] | 6 | 3 | [2, 10] | 6 | 3 | [2, 10] | |
| 39 | 5 | 2 | [1, 9] | 5 | 2 | [1, 9] | 5 | 2 | [1, 9] | 5 | 2 | [1, 9] | |
| 41 | 3 | 2 | [0, 6] | 3 | 2 | [0, 6] | 3 | 2 | [0, 6] | 3 | 2 | [0, 6] | |
| MAE | 5.3 | 7.1 | 5.6 | 4.1 | |||||||||
| RMSE | 6.4 | 8.4 | 6.9 | 4.8 | |||||||||
| STD | 3.9 | 4.8 | 4.2 | 2.7 | |||||||||
| MAPE | 14% | 20% | 15% | 10% | |||||||||
References
- Schmuch, R.; Wagner, R.; Hörpel, G.; Placke, T.; Winter, M. Performance and cost of materials for lithium-based rechargeable automotive batteries. Nat. Energy 2018, 3, 267–278. [Google Scholar] [CrossRef]
- Zhou, J.; Liu, D.; Peng, Y.; Peng, X. Dynamic battery remaining useful life estimation: An on-line data-driven approach. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference Proceedings, Graz, Austria, 13–16 May 2012; pp. 2196–2199. [Google Scholar]
- Zhang, Y.Z.; Xiong, R. Lithium-Ion Battery Remaining Useful Life Prediction with Box-Cox Transformation and Monte Carlo Simulation. IEEE Trans. Ind. Electron. 2019, 66, 1585–1597. [Google Scholar] [CrossRef]
- Chen, L.; Wang, H.; Chen, J. A novel remaining useful life prediction framework for lithium-ion battery using grey model and particle filtering. Int. J. Energy Res. 2020, 44, 7435–7449. [Google Scholar] [CrossRef]
- Su, X.; Wang, S.; Pecht, M. Interacting multiple model particle filter for prognostics of lithium-ion batteries. Microelectron. Reliab. 2017, 70, 59–69. [Google Scholar] [CrossRef]
- Jin, G.; Matthews, D.E.; Zhou, Z. A Bayesian framework for online degradation assessment and residual life prediction of secondary batteries in spacecraft. Reliab. Eng. Syst. Saf. 2013, 113, 7–20. [Google Scholar] [CrossRef]
- Zhang, W.G.; Shi, W.; Ma, Z.Y. Adaptive unscented Kalman filter-based state of energy and power capability estimation approach for lithium-ion battery. Power Sources 2015, 289, 50–62. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Chen, C.; Pecht, M. State of charge estimation for Li-ion batteries using neural network modeling and unscented Kalman filter-based error cancellation. Int. J. Electr. Power Energy Syst. 2014, 62, 783–791. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Osterman, M.; Pecht, M. Prognostics of lithium-ion batteries based on Dempster–Shafer theory and the Bayesian Monte Carlo method. J. Power Sources 2011, 196, 10314–10321. [Google Scholar] [CrossRef]
- Liu, J.; Wang, W.; Ma, F. A regularized auxiliary particle filtering approach for system state estimation and battery life prediction. Smart Mater. Struct. 2011, 20, 075021. [Google Scholar] [CrossRef]
- Saha, B.; Goebel, K. Modeling li-ion battery capacity depletion in a particle filtering framework. In Proceedings of the Annual Conference of the Prognostics and Health Management Society, San Diego, CA, USA, 27 September 2009; pp. 1–10. [Google Scholar]
- Hu, C.; Jain, G.; Tamirisa, P.; Gorka, T. Method for estimating capacity and predicting remaining useful life of lithium-ion battery. Appl. Energy 2014, 126, 182–189. [Google Scholar] [CrossRef]
- Sankararaman, S.; Daigle, M.; Goebel, K. Uncertainty quantification in remaining useful life prediction using first-order reliability methods. IEEE Trans. Reliab. 2014, 63, 603–619. [Google Scholar] [CrossRef]
- Shamshirband, S.; Fathi, M.; Dehzangi, A.; Chronopoulos, A.T.; Alinejad-Rokny, H. A review on deep learning approaches in healthcare systems: Taxonomies, challenges, and open issues. J. Biomed. Inform. 2020, 113, 103627. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiong, R.; He, H. Long Short-Term Memory Recurrent Neural Network for Remaining Useful Life Prediction of Lithium-Ion Batteries. IEEE Trans. Veh. Technol. 2018, 67, 5695–5705. [Google Scholar] [CrossRef]
- Liu, J.; Saxena, A.; Goebel, K.; Saha, B.; Wang, W. An adaptive recurrent neural network for remaining useful life prediction of lithium-ion batteries. Proc. Annu. Conf. Progn. Health Manag. Soc. 2010, 2, 1–9. [Google Scholar]
- Liu, D.; Zhou, J.; Liao, H.; Peng, Y.; Peng, X. A health indicator extraction and optimization framework for lithium-ion battery degradation modelling and prognostics. IEEE Trans. Syst. Man. Cybern. Syst. 2015, 45, 915–928. [Google Scholar]
- Chinomona, B.; Chung, C.; Chang, L.K.; Su, W.C.; Tsai, M.C. Long Short-Term Memory Approach to Estimate Battery Remaining Useful Life Using Partial Data. IEEE Access 2020, 8, 165419–165431. [Google Scholar] [CrossRef]
- Ardeshiri, R.R.; Ma, C.B. Multivariate gated recurrent unit for battery remaining useful life prediction: A deep learning approach. Int. J. Energy Res. 2021, 45, 16633–16648. [Google Scholar] [CrossRef]
- Li, D.D.; Yang, L. Remaining useful life prediction of lithium battery using convolutional neural network with optimized parameters. In Proceedings of the IEEE 2020 5th Asia Conference on Power and Electrical Engineering (ACPEE), Chengdu, China, 4–7 June 2020; pp. 840–844. [Google Scholar]
- Li, Y.; Li, K.; Liu, X.; Wang, Y.; Zhang, L. Lithium-ion battery capacity estimation-A pruned convolutional neural network approach assisted with transfer learning. Appl. Energy 2021, 285, 116410. [Google Scholar] [CrossRef]
- Wilbik, A.; Kacprzyk, J. Towards a multi-criteria analysis of linguistic summaries of time series via the measure of informativeness. Int. J. Data Anal. Tech. Strateg. 2012, 4, 181–204. [Google Scholar] [CrossRef]
- Gupta, C.; Jain, A.; Tayal, D.K.; Castillo, O. ClusFuDE: Forecasting low dimensional numerical data using an improved method based on automatic clustering, fuzzy relationships and differential evolution. Eng. Appl. Artif. Intell. 2018, 71, 175–189. [Google Scholar] [CrossRef]
- Patil, M.A.; Tagade, P.; Hariharan, K.S.; Kolake, S.M.; Song, T.; Yeo, T.; Doo, S. A novel multistage support vector machine-based approach for Li ion battery remaining useful life estimation. Appl. Energy 2015, 159, 285–297. [Google Scholar] [CrossRef]
- Li, S. RUL prediction for lithium-ion batteries based on relevance vector machine. Comput. Eng. Des. 2018, 39, 2682–2686. (In Chinese) [Google Scholar]
- Liu, Y.F. A fusion prediction method of lithium-ion battery cycle-life. Chin. J. Sci. Instrum. 2015, 36, 1462–1469. (In Chinese) [Google Scholar]
- Zhou, J.B.; Wang, S.J.; Ma, L.P. Study on the reconfigurable remaining useful life estimation system for satellite lithium-ion battery. Chin. J. Sci. Instrum. 2013, 34, 2034–2044. (In Chinese) [Google Scholar]
- Wang, D.; Miao, Q.; Pecht, M. Prognostics of lithium-ion batteries based on relevance vectors and a conditional three parameter capacity degradation model. J. Power Sources 2013, 239, 253–264. [Google Scholar] [CrossRef]
- Gao, D.; Huang, M. Prediction of remaining useful life of lithium-ion battery based on multi-kernel support vector machine with particle swarm optimization. Power Electron. 2017, 17, 1288–1297. [Google Scholar]
- Liu, Y.F.; Zhao, G.Q.; Peng, X.Y. A Lithium-Ion Battery Remaining Using Life Prediction Method Based on Multi-kernel Relevance Vector Machine Optimized Model. Acta Electron. Sin. 2019, 47, 1285–1292. (In Chinese) [Google Scholar]
- Kheirkhah-Rad, E.; Moeini-Aghtaie, M. A novel data-driven SOH prediction model for lithium-ion batteries. In Proceedings of the 31st AUPEC, Perth, Australia, 26–30 September 2021; pp. 1–6. [Google Scholar]
- Tipping, M.E. Sparse Bayesian learning and the relevance vector machine. J. Mach. Learn. Res. 2001, 1, 211–244. [Google Scholar]
- Saha, B.; Goebel, K. Battery Data Set. In NASA Ames Prognostics Data Repository; NASA Ames Research Center: Mountain View, CA, USA, 2007. [Google Scholar]
- Shafiullah, M.; Abido, M.A.; Abdel-Fattah, T. Distribution Grids Fault Location employing ST based Optimized Machine Learning Approach. Energies 2018, 11, 2328. [Google Scholar] [CrossRef] [Green Version]
- Gilsing, R.; Turetken, O.; Ozkan, B.; Grefen, P.; Adali, O.E.; Wilbik, A.; Berkers, F. Evaluating the Design of Service-Dominant Business Models: A Qualitative Method. Pac. Asia J. Assoc. Inf. Syst. 2021, 13, 2. [Google Scholar]
- Zhang, H.D. EM Algorithm and Applications; Shandong University: Ji-nan, China, 2014. (In Chinese) [Google Scholar]







| Battery Number | Discharge Current | End Voltage(V) | Charge Current | End-of-Life (Capacity Fade (%)) | Operating Temperature (°C) | Number of Cycles |
|---|---|---|---|---|---|---|
| No. 05 | 2A constant current | 2.7 | 1.5CC mode then change to 4.2V CV mode | 30% | 24 | 168 |
| No. 06 | 2A constant current | 2.5 | 30% | 24 | 168 | |
| No. 32 | 4A constant current | 2.7 | 20% | 43 | 40 | |
| No. 36 | 2A constant current | 2.7 | 20% | 24 | 197 | |
| No. 47 | Fixed loaded-1A | 2.5 | 30% | 4 | 72 |
| Battery | Window Size | MAE | RMSE | STD | MAPE |
|---|---|---|---|---|---|
| No. 05 | Dynamic | 12.9 | 14.8 | 7.6 | 11.5% |
| 20 | 17.3 | 20.8 | 11.9 | 13.8% | |
| 30 | 16.3 | 19.8 | 11.7 | 12.8% | |
| 40 | 18.1 | 19.3 | 7.2 | 16.7% | |
| No. 32 | Dynamic | 4.5 | 5.3 | 3.2 | 16.1% |
| 6 | 4.9 | 5.8 | 3.4 | 17.9% | |
| 8 | 6.0 | 6.3 | 2.2 | 21.3% | |
| No. 36 | Dynamic | 12.6 | 14.2 | 6.4 | 7.1% |
| 20 | 29.9 | 33.3 | 14.7 | 20.5% | |
| 30 | 23.6 | 28.6 | 16.1 | 12.4% | |
| 40 | 13.6 | 17.6 | 11.2 | 7.3% | |
| No. 47 | Dynamic | 4.1 | 4.8 | 2.7 | 10.2% |
| 10 | 5.6 | 6.9 | 4.2 | 15.3% | |
| 15 | 7.1 | 8.4 | 4.8 | 20.0% | |
| 20 | 5.3 | 6.4 | 3.9 | 13.9% |
| Algorithm | Prediction Starting Cycle | RUL Prediction Error | 95% Confidence Bound |
|---|---|---|---|
| RVM-GM | 15 | 40 | [89, 111] |
| 40 | 17 | [116, 130] | |
| 70 | 19 | [115, 127] | |
| 100 | 15 | [121, 128] | |
| PF | 15 | 49 | [78, 103] |
| 40 | 23 | [105, 128] | |
| 70 | 21 | [108, 129] | |
| 100 | 19 | [115, 127] | |
| CNN | 15 | 71 | [68, 70] |
| 40 | 55 | [73, 96] | |
| 70 | 45 | [86, 104] | |
| 100 | 21 | [153, 168] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nan, J.; Deng, B.; Cao, W.; Tan, Z. Prediction for the Remaining Useful Life of Lithium–Ion Battery Based on RVM-GM with Dynamic Size of Moving Window. World Electr. Veh. J. 2022, 13, 25. https://doi.org/10.3390/wevj13020025
Nan J, Deng B, Cao W, Tan Z. Prediction for the Remaining Useful Life of Lithium–Ion Battery Based on RVM-GM with Dynamic Size of Moving Window. World Electric Vehicle Journal. 2022; 13(2):25. https://doi.org/10.3390/wevj13020025
Chicago/Turabian StyleNan, Jinrui, Bo Deng, Wanke Cao, and Zihao Tan. 2022. "Prediction for the Remaining Useful Life of Lithium–Ion Battery Based on RVM-GM with Dynamic Size of Moving Window" World Electric Vehicle Journal 13, no. 2: 25. https://doi.org/10.3390/wevj13020025
APA StyleNan, J., Deng, B., Cao, W., & Tan, Z. (2022). Prediction for the Remaining Useful Life of Lithium–Ion Battery Based on RVM-GM with Dynamic Size of Moving Window. World Electric Vehicle Journal, 13(2), 25. https://doi.org/10.3390/wevj13020025