
The Integrated Kinetic Energy Recoup Drive (i-KERD): An Optimized Powertrain for EVs, HEVs and FCEVs

Abstract
:1. Introduction
2. Operating Principles of the i-KERD System
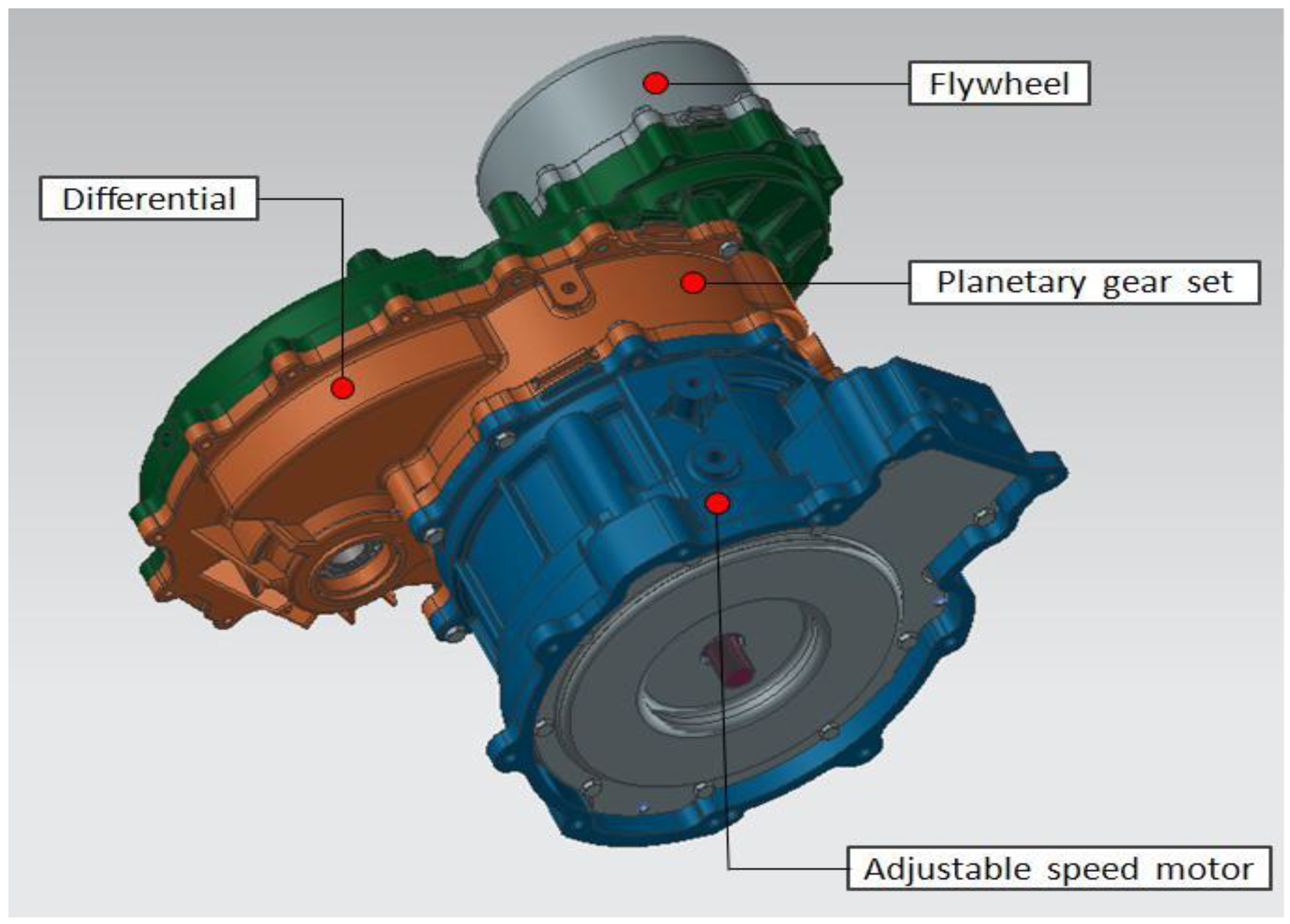
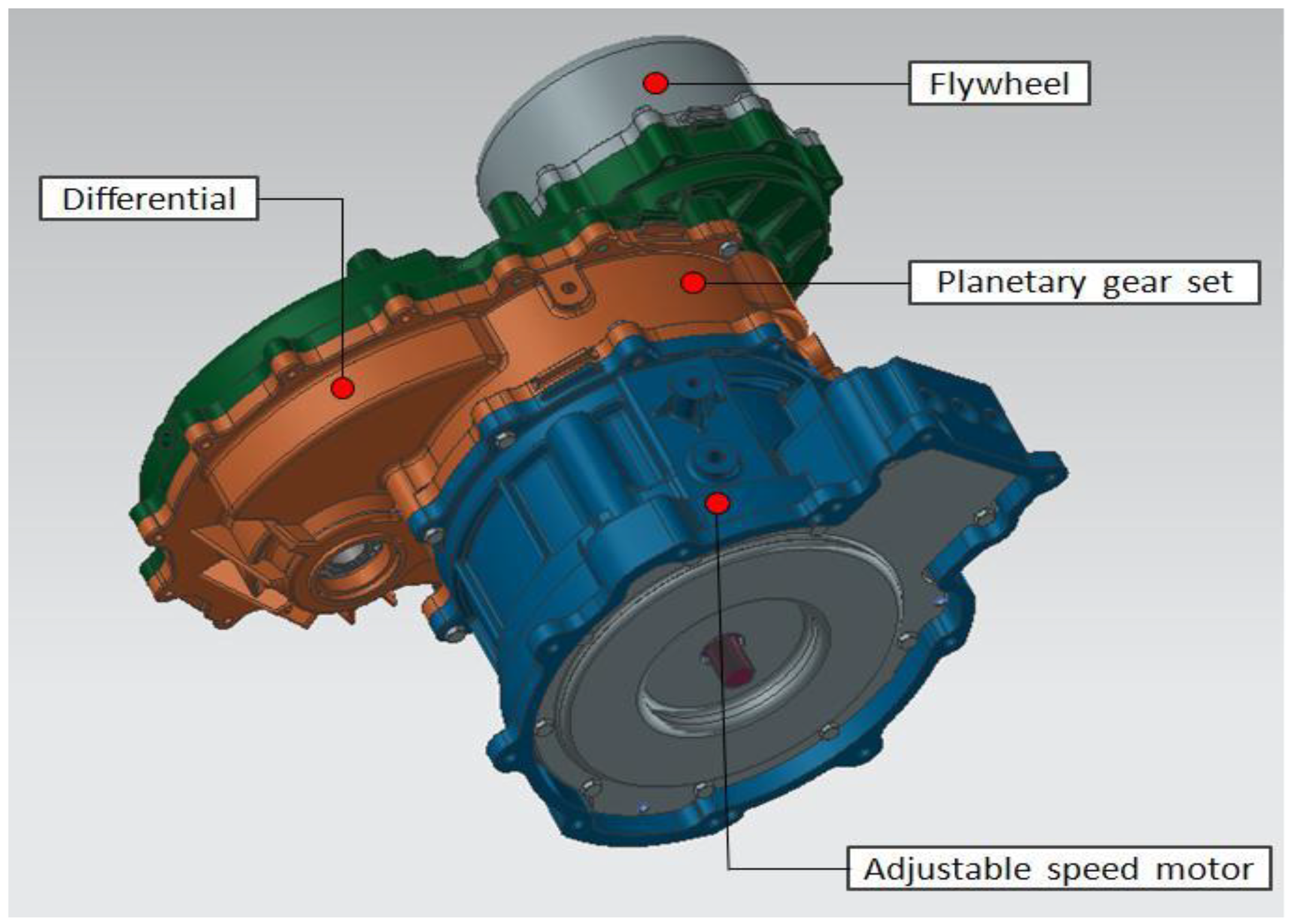
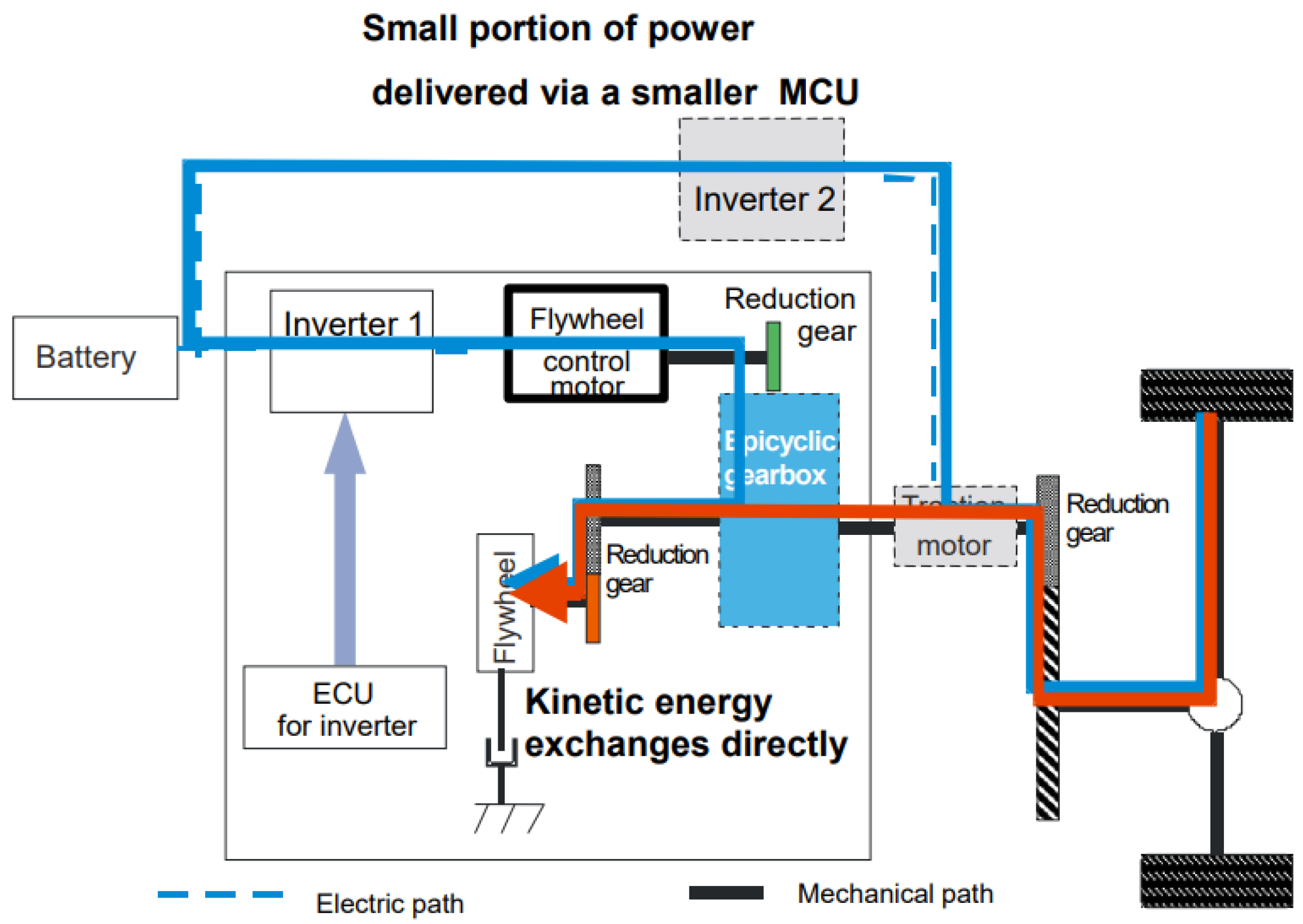
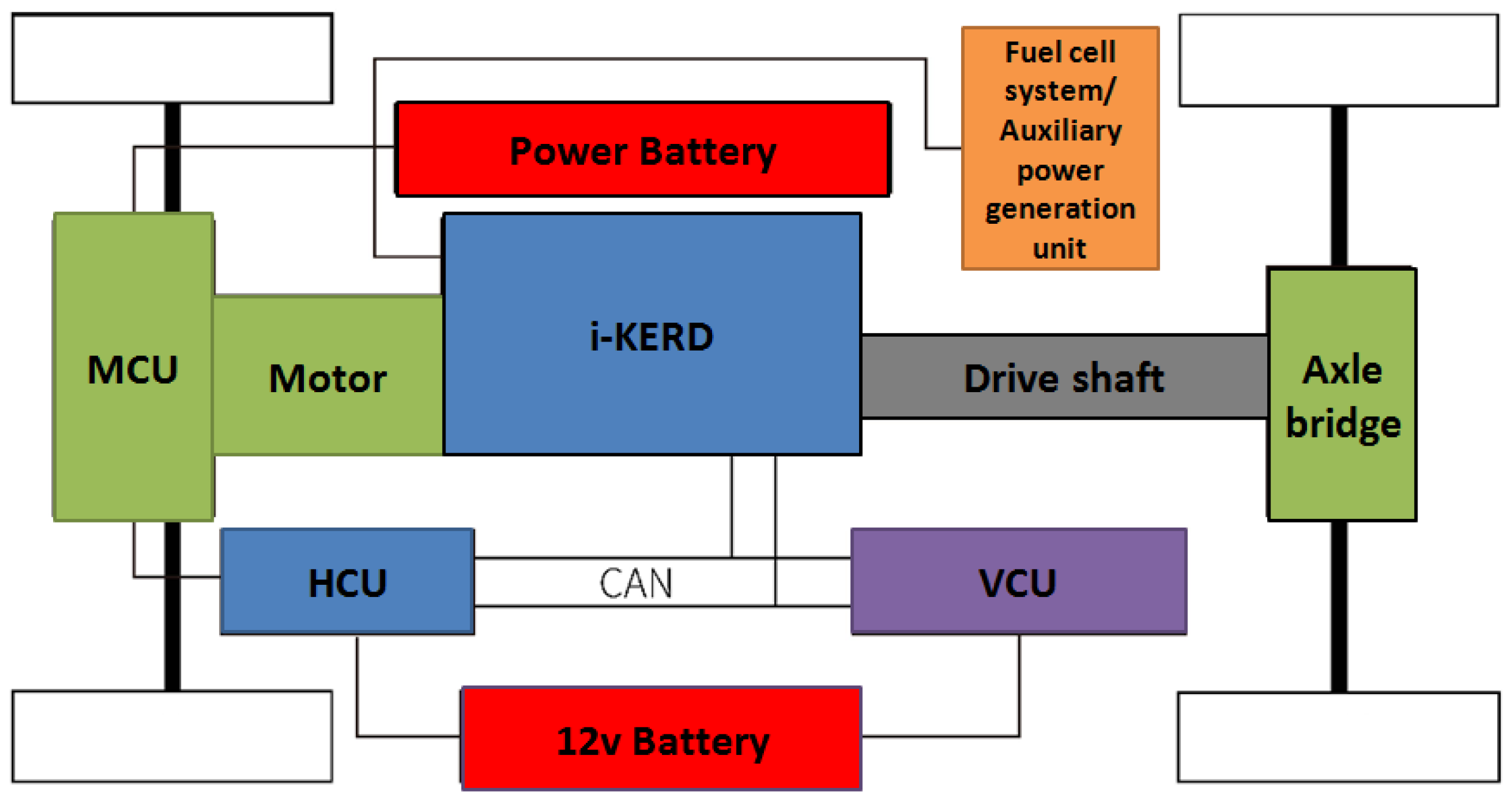
2.1. i-KERD Configuration and System Schematic
- ns—sun speed;
- nr—ring speed;
- nc—carrier speed;
- k—gear ratio of ring-to-sun (k > 1)
- Ts—torque of sun wheel;
- Tr—ring gear torque;
- Tc—carrier torque.
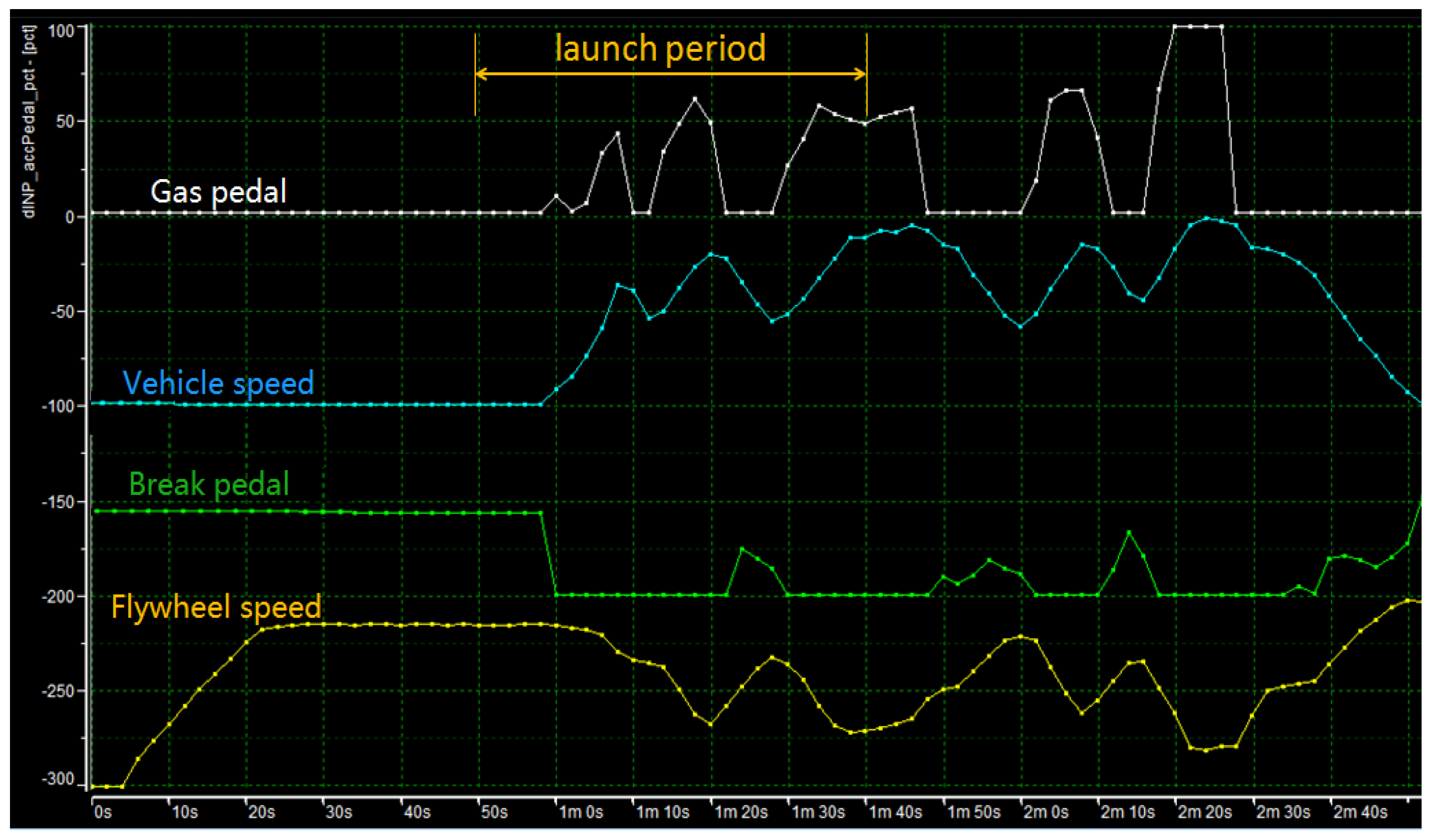
2.2. Operation of the i-KERD during Vehicle Launch/Braking
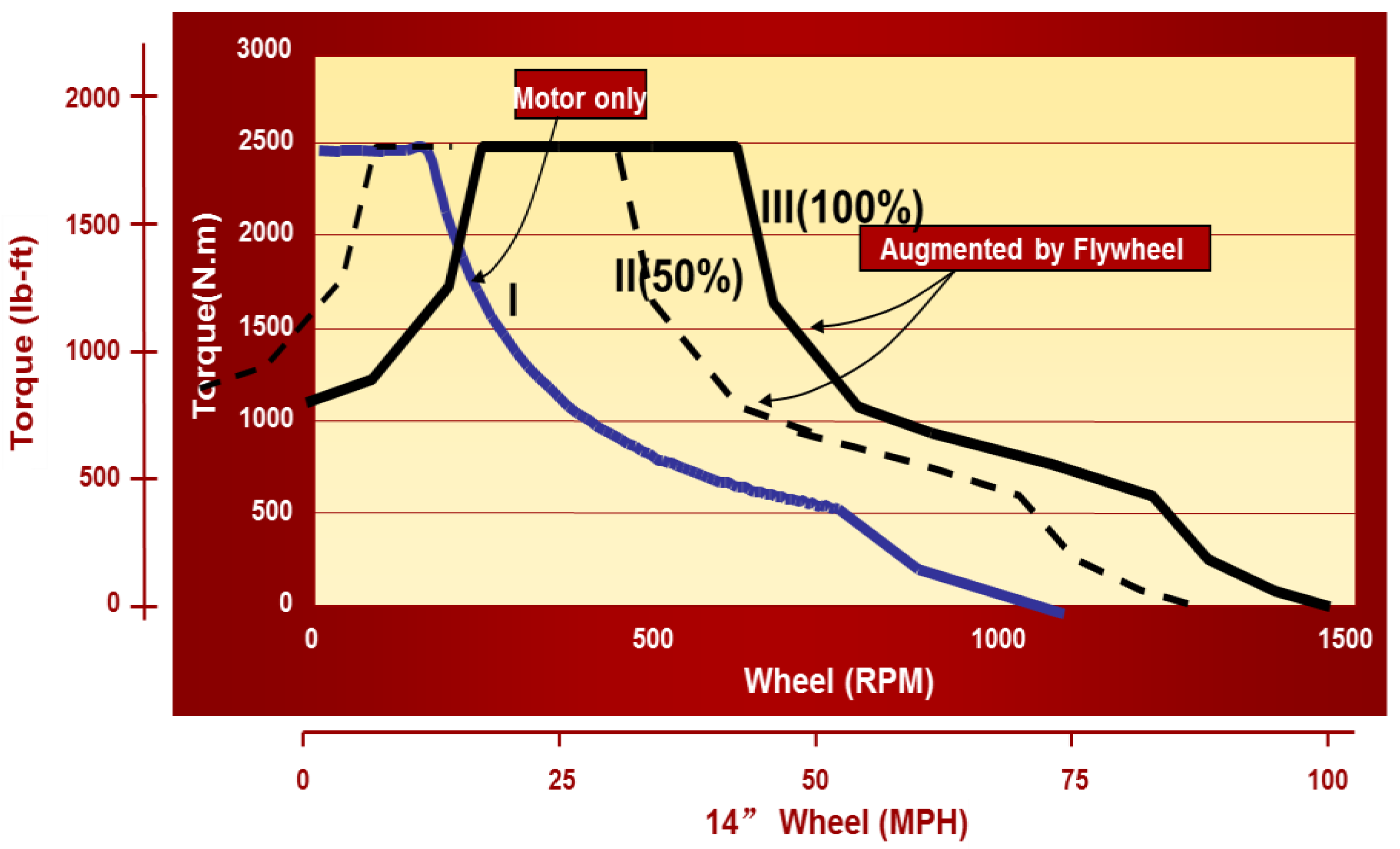
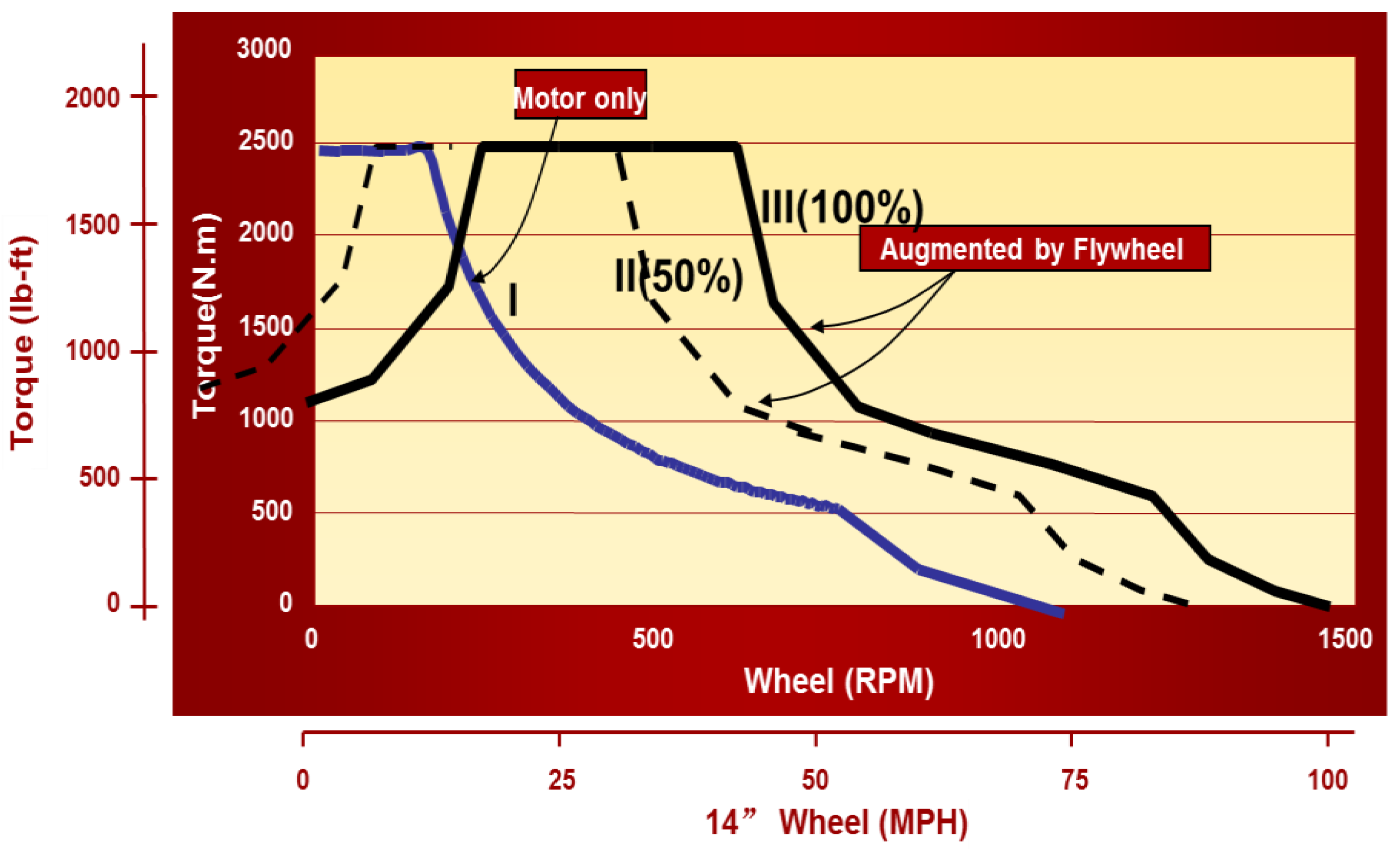
2.3. Dynamic Torque Characteristic of the i-KERD System
3. Description of Various Applications of the i-KERD
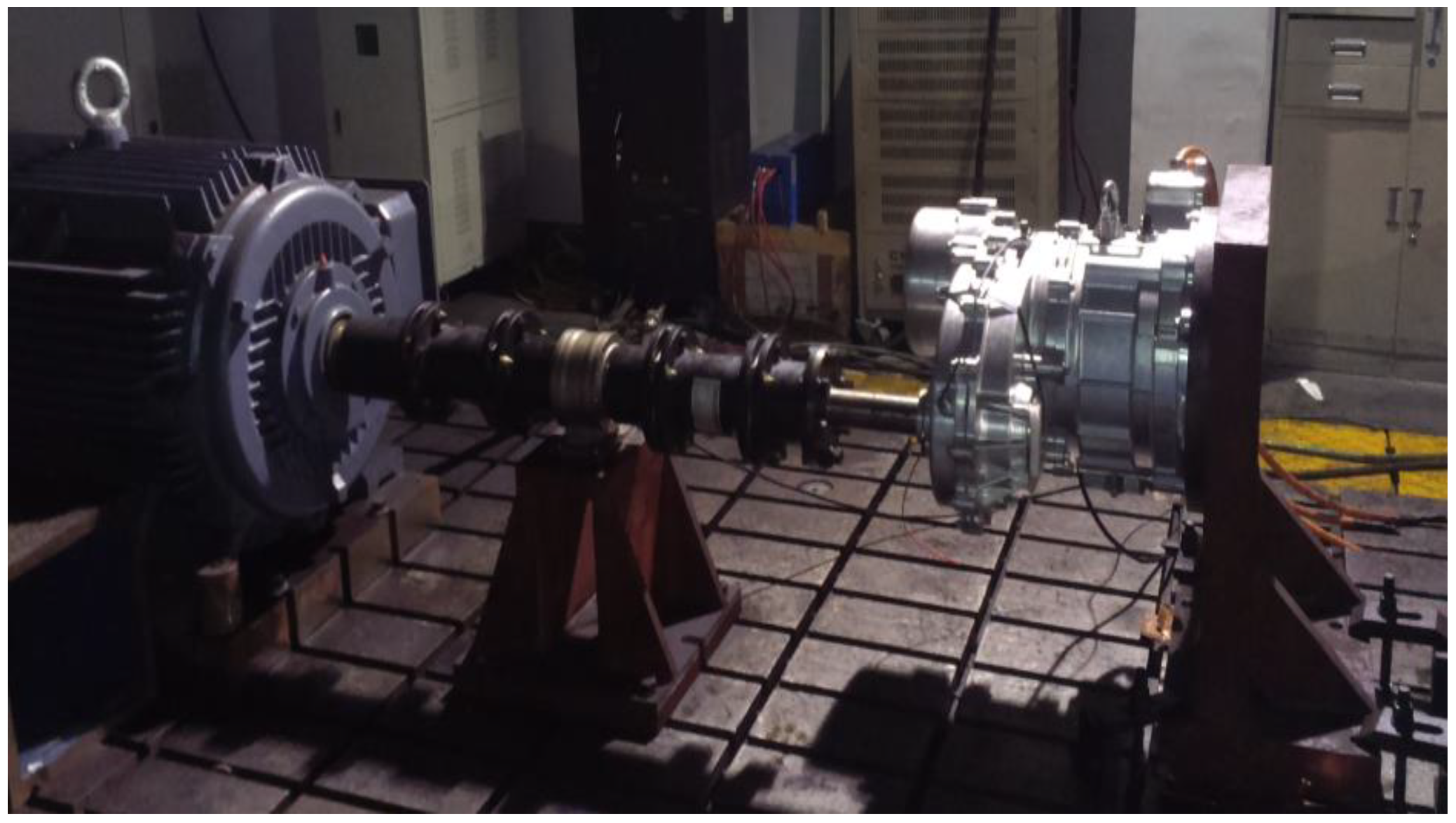
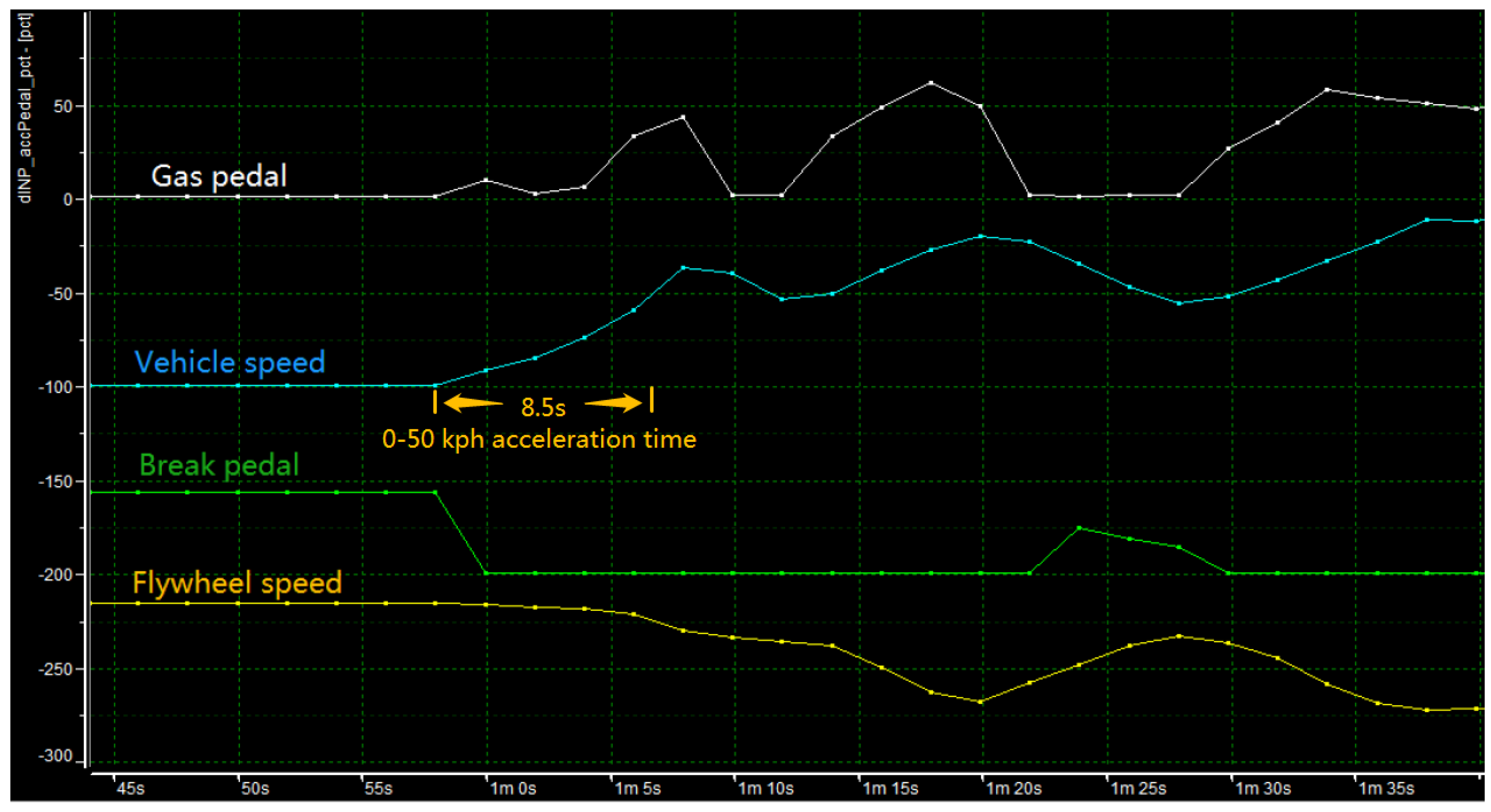
4. Test Results and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- ORNL DoE Report: An Assessment of Flywheel High Power Energy Storage Technology for Hybrid Vehicles. ORNL/TM-2010/280[R/OL]. December 2011. Available online: https://info.ornl.gov/sites/publications/files/Pub31707.pdf (accessed on 1 November 2021).
- Liao, Y.; Yang, M. Flywheel ESS and Flywheel Power Drive. In Engineering Handbook of Electric Vehicles; Sun, F., Ed.; China Machine Press: Beijing, China, 2019; Volume 5, ISBN 9787111640172. [Google Scholar]
- Jiancheng, Z.; Lipei, H.; Zhiye, C. Research on flywheel energy storage system and its controlling technique. Proc. CSEE 2003, 23, 108–111. [Google Scholar]
- Ershad, N.F.; Mehrjardi, R.T.; Ehsani, M. Electro-mechanical EV powertrain with reduced Volt-Ampere rating. IEEE Trans. Veh. Technol. 2019, 68, 224–233. [Google Scholar] [CrossRef]
- Robert, H.; Joseph, B. Flywheel batteries come around again. IEEE Spectr. 2002, 39, 46–51. [Google Scholar]
- Diego-Ayala, U.; Martinea-Gonzalez, P.; McGlashan, N. The mechanical hybrid vehicle: An investigation of a flywheel-based vehicular regenerative energy capture system. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2008, 222, 2087–2101. [Google Scholar] [CrossRef]
- Bitterly, J.G. Flywheel technology: Past, present, and 21st century projects. IEEE Aerosp. Electron. Syst. Mag. 1998, 13, 13–16. [Google Scholar] [CrossRef]
- Greenwood, C.J. Integration of a Commercial Vehicle Regenerative Braking Driveline; Institution of Mechanical Engineers Conference Publications: Bath, UK, 1986; pp. 127–133. [Google Scholar]
- Serrarens, A.F.A.; Shen, S.; Veldpaus, F.E. Control of a flywheel assisted driveline with continuously variable transmission. J. Dyn. Syst. Meas. Control. 2003, 125, 455–461. [Google Scholar] [CrossRef]
- Shen, S.; Serrarens, A.F.A.; Steinbuch, M.; Veldpaus, F. Coordinated control of a mechanical hybrid driveline with a continuously variable transmission. JSAE Rev. 2001, 22, 453–461. [Google Scholar] [CrossRef]
- Shen, S.; Vroemen, B.; Veldpaus, F. IdleStop and Go: Away to improve fuel economy. Veh. Syst. Dyn. Int. J. Veh. Mech. Mobil. 2006, 44, 449–476. [Google Scholar]
- Vroemen, B.; Serrarens, A.F.A.; Veldpaus, F. Hierarchical control of the zero inertia powertrain. JSAE Rev. 2001, 22, 519–526. [Google Scholar] [CrossRef]
- Brockbank, C.; Greenwood, C. Fuel economy benefits of a flywheel and CVT based mechanical hybrid for city bus and commercial vehicle applications. SAE Int. J. Commer. Veh. 2010, 2, 115–122. [Google Scholar] [CrossRef]
- McDonough, J. System Dynamics Modeling and Development of a Design Procedure for Short-Term Alternative Energy Storage Systems. Ph.D. Thesis, The Ohio State University, Columbus, OH, USA, 2011. [Google Scholar]
- Zhang, W.; Yang, H.; Zhu, H. Key technologies and technical bottleneck analysis of flywheel battery systems for electric vehicle. Proc. CSEE 2018, 38, 5568–5581. [Google Scholar]
- Bolund, B.; Bernhoff, H.; Leijon, M. Flywheel energy and power storage systems. Renew. Sustain. Energy Rev. 2007, 11, 235–258. [Google Scholar] [CrossRef]
- Ellis, C. Kinetic Energy Storage System. U.S. Patent 5,931,249, 3 August 1999. [Google Scholar]
- Liao, Y.; Yang, M. Flywheel Power Drives for HEV’s. Chinese Patent ZL201310112569.2, 7 July 2017. [Google Scholar]
- Liao, Y.; Yang, M. Energy-Efficient Drives for NEV’s. Chinese Patent ZL201310112572.4, 27 April 2016. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimensions (mm) | Curb Weight (kg) | Maximum Gross Weight (kg) | Maximum Speed (km/h) | Grade-Ability (%) |
|---|---|---|---|---|
| 5150 × 1830 × 2250 | 2950 | 4495 | 90 | 20 |
| Electric Drive System | Motor Power (kw) | Maximum Torque (N·m) | 0–80 km/h (S) | Maximum Speed (km/h) | Grade-Ability (%) | |
|---|---|---|---|---|---|---|
| Pure Electric Drive |  | 120 | 637 | 15.3 | 94 | 22 |
| i-KERD |  | 60 | 627 | 15.5 | 92 | 23 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, M.; Wang, T.; Guo, C.; Ellis, C.; Liao, Y. The Integrated Kinetic Energy Recoup Drive (i-KERD): An Optimized Powertrain for EVs, HEVs and FCEVs. World Electr. Veh. J. 2022, 13, 8. https://doi.org/10.3390/wevj13010008
Yang M, Wang T, Guo C, Ellis C, Liao Y. The Integrated Kinetic Energy Recoup Drive (i-KERD): An Optimized Powertrain for EVs, HEVs and FCEVs. World Electric Vehicle Journal. 2022; 13(1):8. https://doi.org/10.3390/wevj13010008
Chicago/Turabian StyleYang, Min, Tao Wang, Chunji Guo, Chris Ellis, and Yuefeng Liao. 2022. "The Integrated Kinetic Energy Recoup Drive (i-KERD): An Optimized Powertrain for EVs, HEVs and FCEVs" World Electric Vehicle Journal 13, no. 1: 8. https://doi.org/10.3390/wevj13010008
APA StyleYang, M., Wang, T., Guo, C., Ellis, C., & Liao, Y. (2022). The Integrated Kinetic Energy Recoup Drive (i-KERD): An Optimized Powertrain for EVs, HEVs and FCEVs. World Electric Vehicle Journal, 13(1), 8. https://doi.org/10.3390/wevj13010008