
Dual-Side Phase-Shift Control for Strongly Coupled Series–Series Compensated Electric Vehicle Wireless Charging Systems


Abstract
:1. Introduction
- (1)
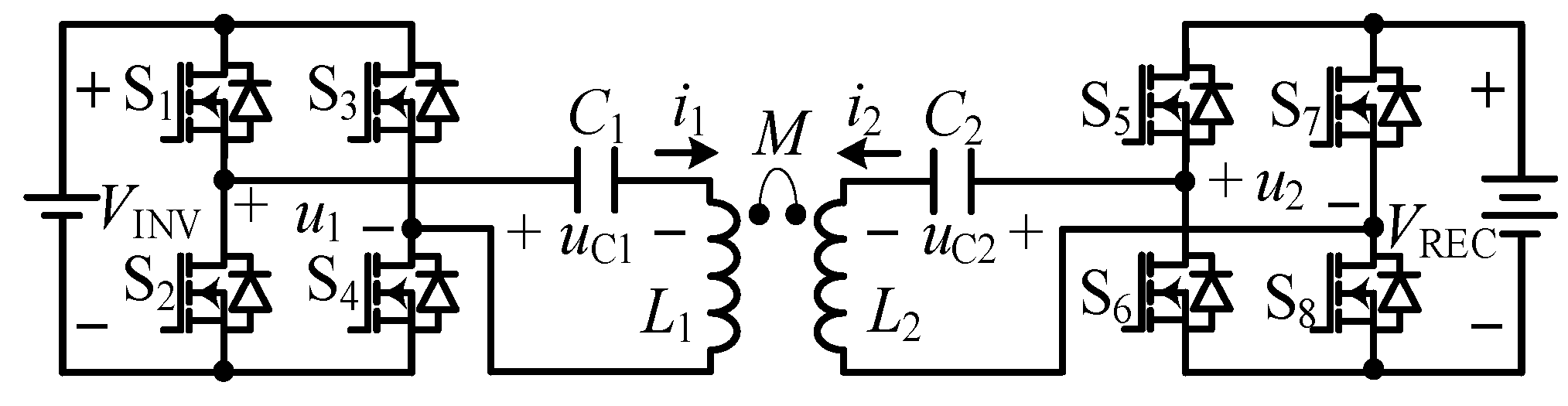
- Synchronous rectification is normally conducted to the secondary-side rectifier of the loosely coupled WPT systems to improve efficiency [9,10]. However, it is found in strongly coupled WPT systems that this will result in the primary-side inverter working in hard switching, leading to decreasing efficiency and potential circuit failures. Additionally, in loosely coupled WPT systems, dual-side phase-shift control is seldomly used to regulate the secondary-side charging current due to the fact that too much reactive power will be introduced if the phase difference between the primary-side and secondary-side voltages is not 90°. However, in strongly coupled WPT systems, since the coupling coefficient is large, the efficiency can still be high even though the phase difference is not 90°. Thus, the secondary-side charging current and even bidirectional power flow can be easily regulated. The contributions of this paper include building the mathematical model of dual-side phase-shift control for strongly coupled WPT systems;
- (2)
- Investigating the performance of dual-side phase-shift control for strongly coupled WPT systems;
- (3)
- Revealing that synchronous rectification is not suitable for strongly coupled WPT system because soft switching can be lost;
- (4)
- Experimentally validating the model and analysis.
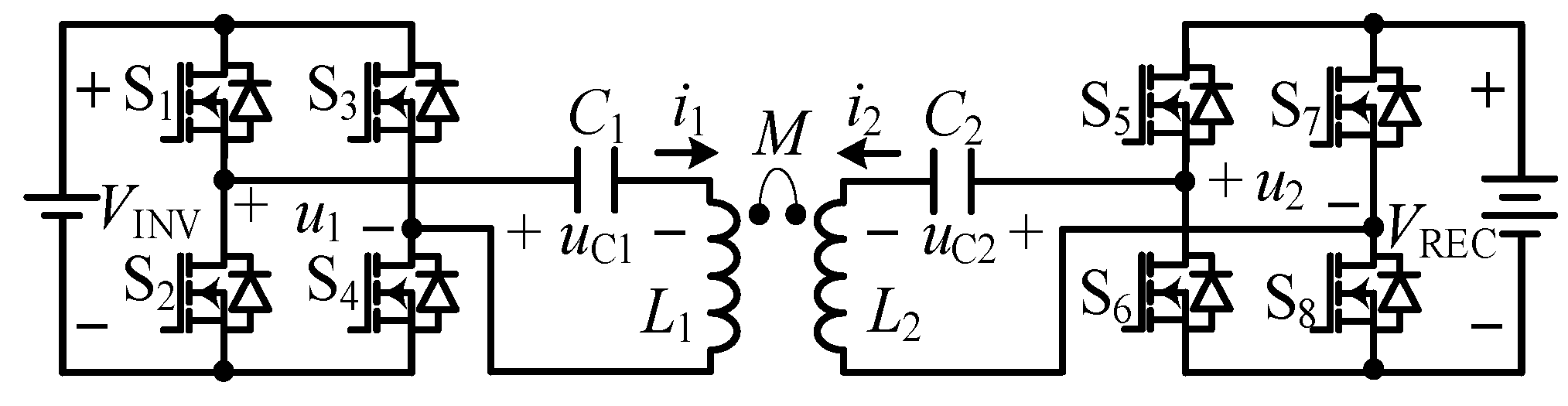
2. Mathematical Modelling
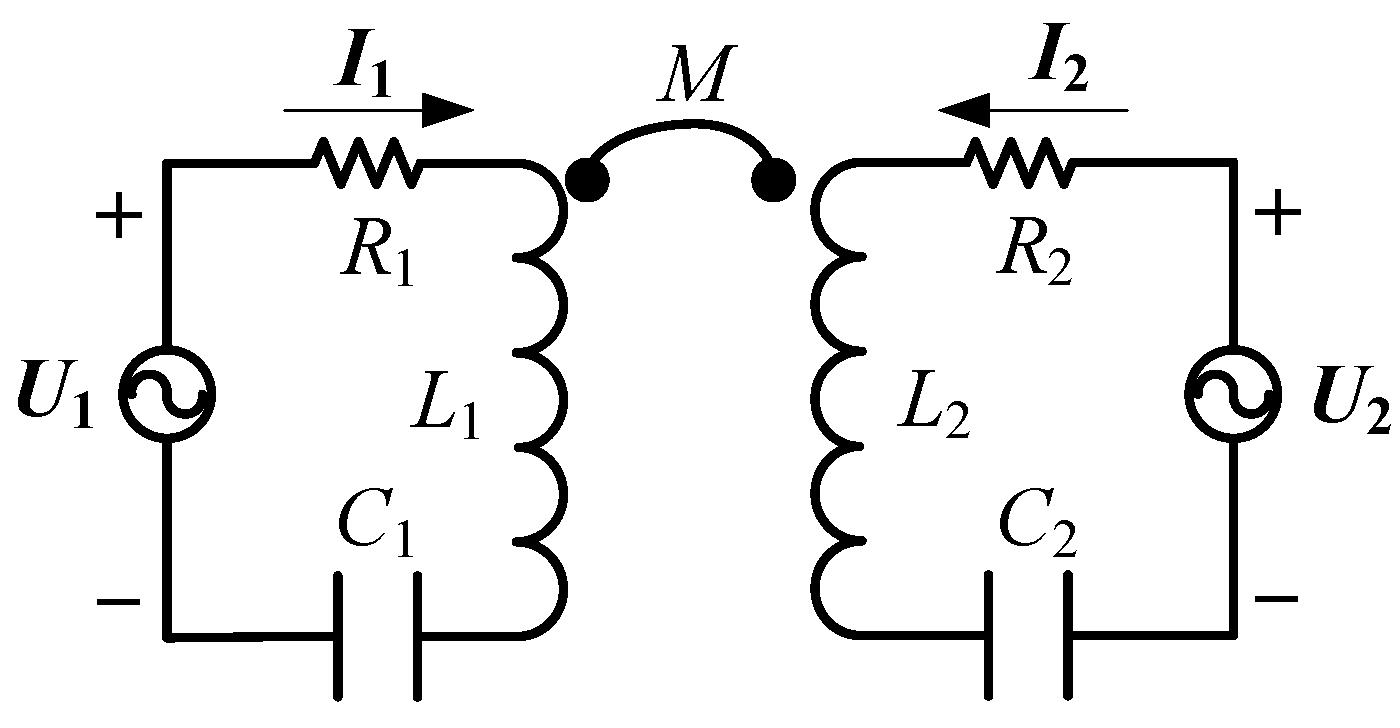
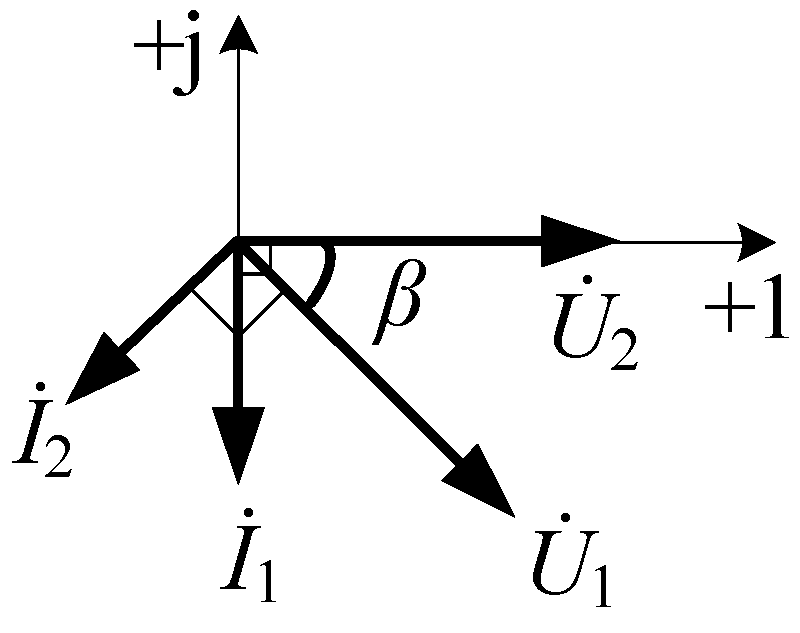
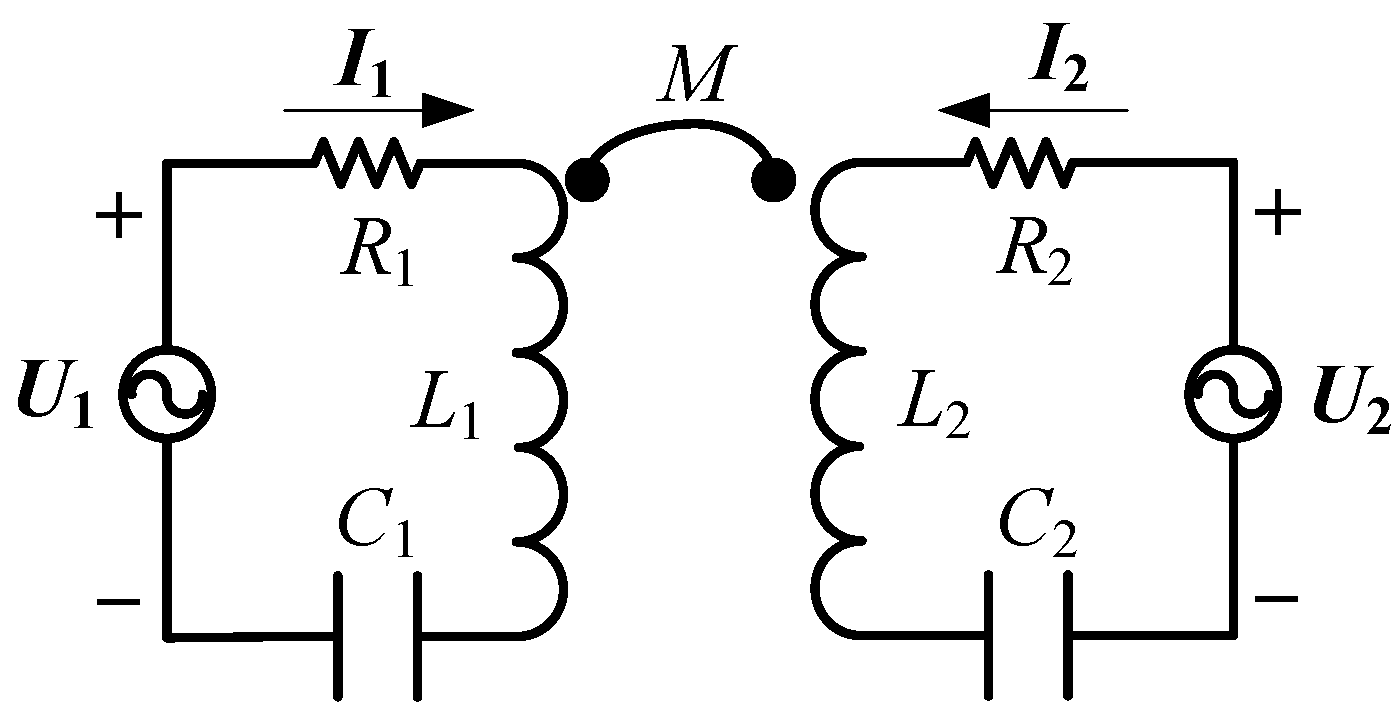
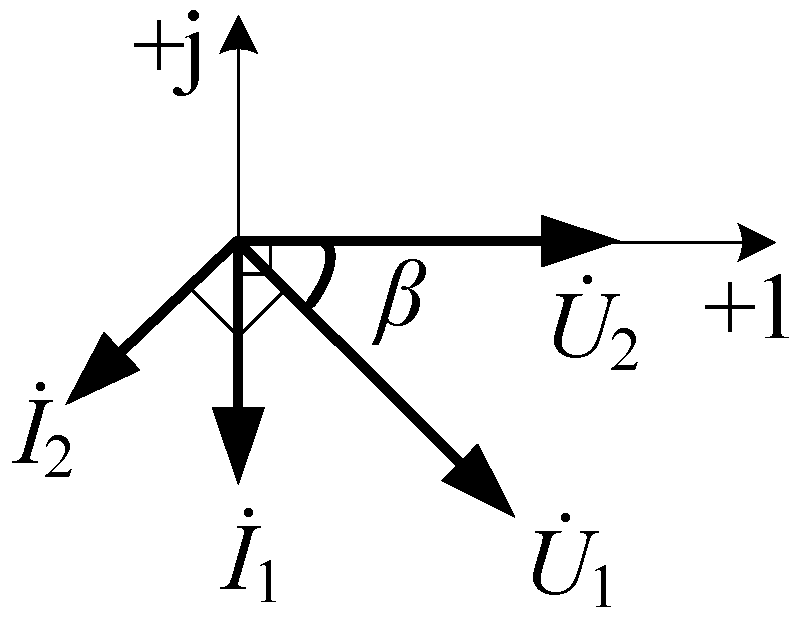
2.1. First Harmonic Approximation
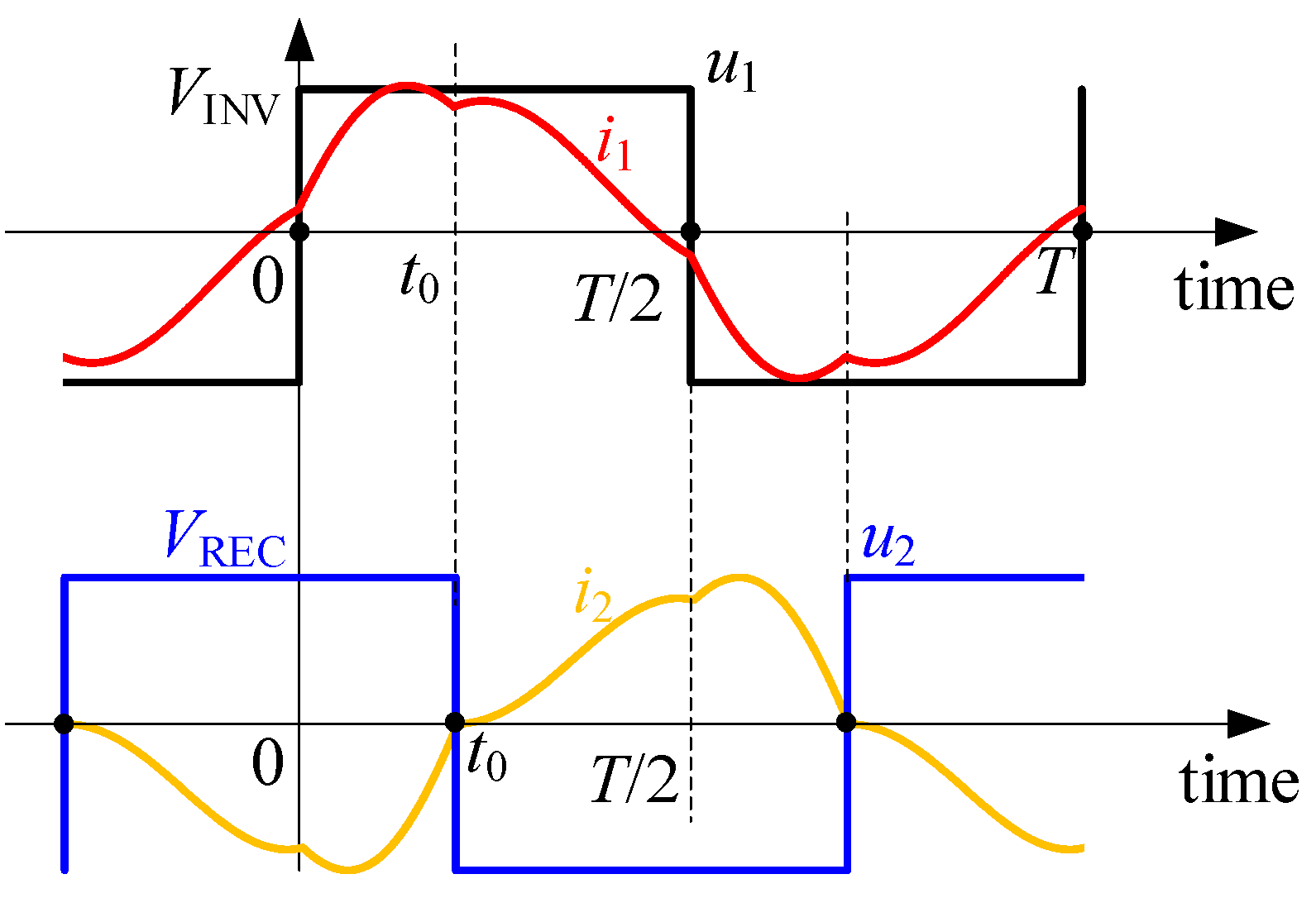
2.2. Time-Domain Modelling
2.3. Comparison of FHA and Model Based on Differential Equations
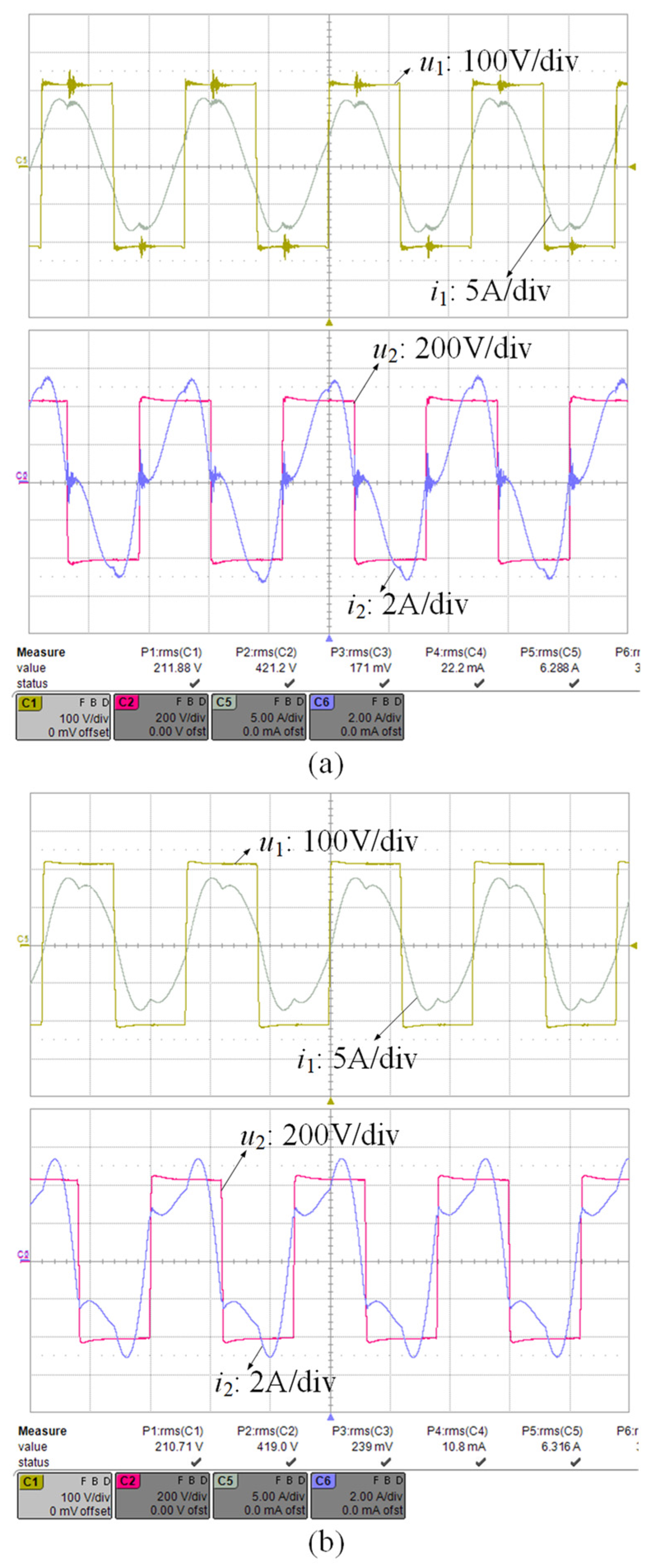
3. Experimental Validation
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ye, F.; Chen, Q.; Chen, W. Analysis and design of magnetic coupling structure in wireless power transmission system. In Proceedings of the 2016 Asia-Pacific International Symposium on Electromagnetic Compatibility (APEMC), Shenzhen, China, 17–21 May 2016; pp. 679–682. [Google Scholar]
- Huynh, P.S.; Williamson, S.S. Analysis and design of soft-switching active-clamping half-bridge boost inverter for inductive wireless charging applications. IEEE Trans. Transport. Electr. 2019, 5, 1027–1039. [Google Scholar] [CrossRef]
- Dai, X.; Wu, J.; Jiang, J.; Gao, R.; Madawala, U.K. An energy injection method to improve power transfer capability of bidirectional WPT system with multiple pickups. IEEE Trans. Power Electron. 2021, 36, 5095–5107. [Google Scholar] [CrossRef]
- Li, Y.; Dong, W.; Yang, Q.; Zhao, J.; Liu, L.; Feng, S. An automatic impedance matching method based on the Feedforward-Backpropagation neural network for WPT system. IEEE Trans. Ind. Electron. 2019, 66, 3963–3972. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, Y.; Kan, T.; Lu, F.; Zhang, K.; Song, B.; Mi, C.C. Frequency optimization of a loosely coupled underwater wireless power transfer system considering eddy current loss. IEEE Trans. Ind. Electron. 2019, 66, 3468–3476. [Google Scholar] [CrossRef]
- Qu, X.; Yao, Y.; Wang, D.; Wong, S.; Tse, C.K. A family of hybrid IPT topologies with near Load-Independent output and high tolerance to pad misalignment. IEEE Trans. Power Electron. 2020, 35, 6867–6877. [Google Scholar] [CrossRef]
- Song, B.; Cui, S.; Li, Y.; Zhu, C. A fast and general method to calculate mutual inductance for EV dynamic wireless charging system. IEEE Trans. Power Electron. 2021, 36, 2696–2709. [Google Scholar] [CrossRef]
- Zhang, Y.; Yan, Z.; Kan, T.; Liu, Y.; Mi, C.C. Modelling and analysis of the distortion of strongly-coupled wireless power transfer systems with SS and LCC–LCC compensations. IET Power Electron. 2019, 12, 1321–1328. [Google Scholar] [CrossRef] [Green Version]
- Song, J.; Liu, M.; Kang, N.; Ma, C. A universal optimal drain–source voltage tracking scheme for synchronous resonant rectifiers in megahertz wireless power transfer applications. IEEE Trans. Power Electron. 2021, 36, 5147–5156. [Google Scholar] [CrossRef]
- Lee, E.S.; Kim, M.Y.; Lee, S.G.; Lee, B.S. A high-efficient duty-controlled synchronous rectifier for uniformly powering of multiple receivers. In Proceedings of the 2020 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Seoul, Korea, 15–19 November 2020; pp. 334–340. [Google Scholar]
- Zhang, Y.; He, F.; Liu, F.; Chen, K.; Zhao, Z. Comparison of two bidirectional wireless power transfer control methods. In Proceedings of the 2016 Asia-Pacific International Symposium on Electromagnetic Compatibility (APEMC), Shenzhen, China, 17–21 May 2016; pp. 68–70. [Google Scholar]
- Zhang, Y.; Li, X.; Chen, S.; Tang, Y. Soft switching for strongly coupled wireless power transfer system with 90° dual-side phase shift. IEEE Trans. Ind. Electron. 2021, in press. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Airgap | 40 mm |
| f0 | 83.3 kHz |
| L1 | 169.7 μH |
| L2 | 169.8 μH |
| C1 | 21.5 nF |
| C2 | 21.5 nF |
| k | 0.64 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Shen, Z.; Wu, Y.; Wang, H.; Pan, W. Dual-Side Phase-Shift Control for Strongly Coupled Series–Series Compensated Electric Vehicle Wireless Charging Systems. World Electr. Veh. J. 2022, 13, 6. https://doi.org/10.3390/wevj13010006
Zhang Y, Shen Z, Wu Y, Wang H, Pan W. Dual-Side Phase-Shift Control for Strongly Coupled Series–Series Compensated Electric Vehicle Wireless Charging Systems. World Electric Vehicle Journal. 2022; 13(1):6. https://doi.org/10.3390/wevj13010006
Chicago/Turabian StyleZhang, Yiming, Zhiwei Shen, Yuanchao Wu, Hui Wang, and Wenbin Pan. 2022. "Dual-Side Phase-Shift Control for Strongly Coupled Series–Series Compensated Electric Vehicle Wireless Charging Systems" World Electric Vehicle Journal 13, no. 1: 6. https://doi.org/10.3390/wevj13010006
APA StyleZhang, Y., Shen, Z., Wu, Y., Wang, H., & Pan, W. (2022). Dual-Side Phase-Shift Control for Strongly Coupled Series–Series Compensated Electric Vehicle Wireless Charging Systems. World Electric Vehicle Journal, 13(1), 6. https://doi.org/10.3390/wevj13010006