1. Introduction
In recent years, as a solution to environmental problems and energy shortages, electric vehicles have become the development trend and research hotspot of the automotive industry. As the core component of electric vehicles, the anti-skid control system can ensure the stable operation of the vehicle under any circumstances, especially in low-adhesion road conditions or emergency situations. The key technology of anti-skid control includes the reliable perception and control of the sliding state of the vehicles. Since the slip rate is related to the adhesion stability and dynamic performance of the vehicle [
1,
2,
3], the main idea of solving the stability is to directly or indirectly control the slip rate of the driving wheel. The perception of vehicle tire-road adhesion status and its driving anti-skid control have been studied in depth by scholars, and some important results have been obtained.
References [
2,
3,
4,
5] are based on the slip rate-adhesion coefficient relationship and use fuzzy algorithms to identify typical road surfaces. The input of the road surface identifier is the wheel slip rate and the road surface adhesion coefficient, and the output is the similarity coefficients of 8 typical road surfaces. The maximum adhesion coefficient and optimal slip rate of the current road surface are obtained, and the wheel slip rate is calculated using the estimated vehicle speed. In driving conditions, the wheel slip rate is mostly within 1%, and the wheel speed signal has noise interference, so it is difficult to accurately obtain slip rate. In addition, the adhesion coefficient and the slip rate are not strongly linear in the small slip rate stage. Therefore, this method is not practical. In the road surface recognition method of the tire model, a standard adhesion coefficient-slip rate curve database is first established according to the accurate tire model, and then the road surface is classified. In order to ensure the accuracy of road recognition, a large amount of test data is needed to identify the characteristic parameters of the tire model [
3,
6]. In Reference [
7], Cabrera et al. proposed a modified Magic Formula tire model to more accurately describe the effect of changes in external conditions (road condition, tire type, vehicle speed, slip rate, etc.) on the coefficient of adhesion. The test results under different road conditions proved that the modified Magic Formula has higher model accuracy.
There are two types of road surface identification methods based on the adhesion coefficient-slip rate relationship curve and based on the tire model [
4], and they both rely on the relationship between the slip rate and the adhesion coefficient. They are the continuation and development of the original technical route, and their reliable realization depends on the accurate calculation of slip rate. The traction conditions of the vehicle are complex, so there are many factors that affect the calculation accuracy of the slip ratio. At the same time, the accurate estimation of the longitudinal speed of the vehicle is still a technical difficulty. Therefore, it is necessary to propose a road identification method that does not rely on slip rate.
At present, anti-skid control algorithms are mainly used by changing the drive torque method [
1,
2,
3,
4,
5,
8] (slip rate closed-loop, MTTE, etc.) and changing the road contact characteristics method [
9]; most of the driving anti-skid control algorithms stay in the simulation stage and the typical working condition test stage, and the effectiveness and robustness of the algorithm have not been verified under complex working conditions. In this paper, skidding is predicted in the absence of slip rate to improve safety. The force transmission characteristics based on the single-wheel dynamics model are analyzed, and a slip factor that can characterize the stability of the vehicle is proposed. The sharp change of the slip factor before the maximum attachment point is used to predict vehicle skids.
2. Materials and Methods Analysis for Time-Delay Effect of Force Transmission Based on Single-Wheel Dynamics Model
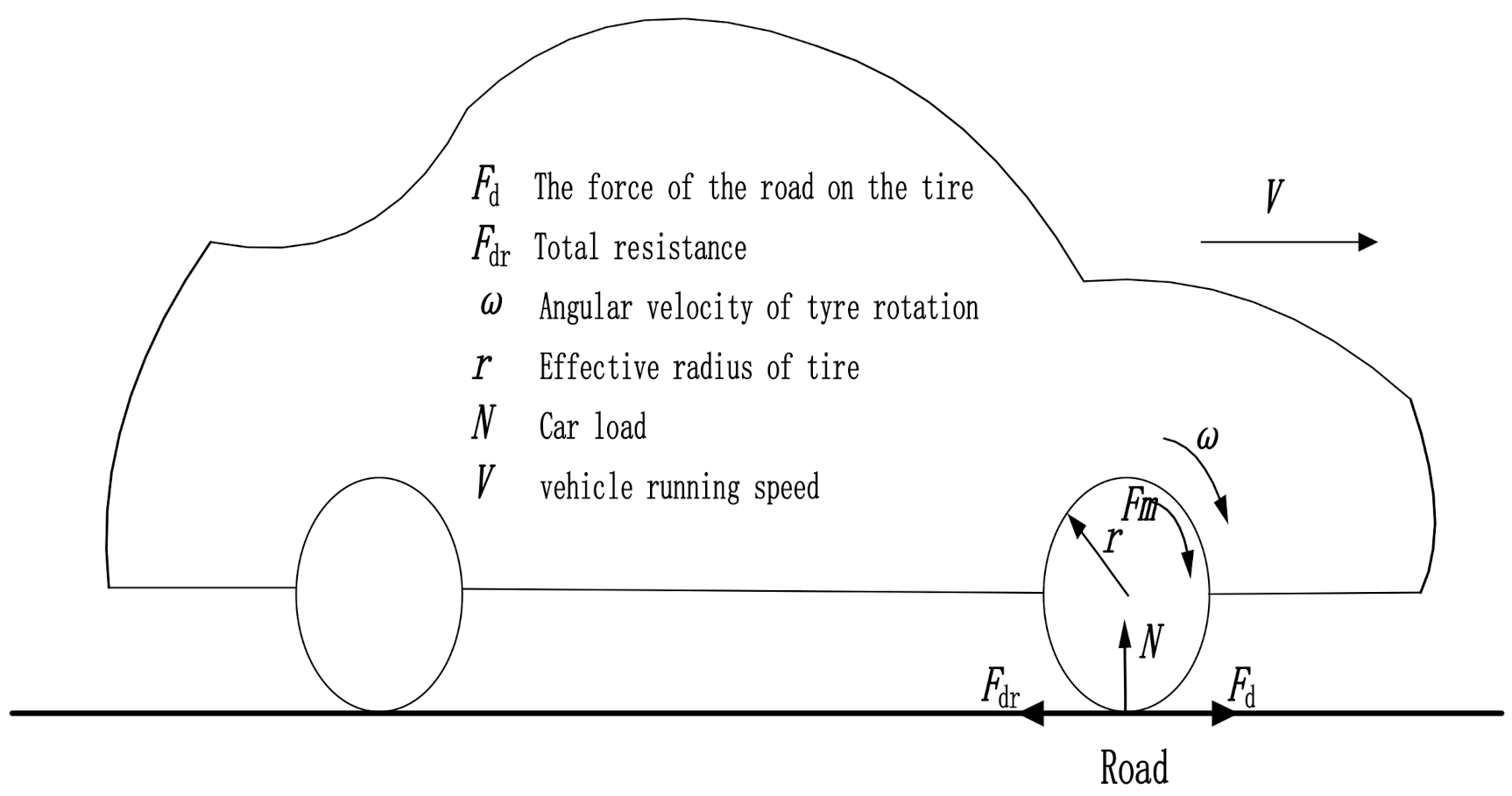
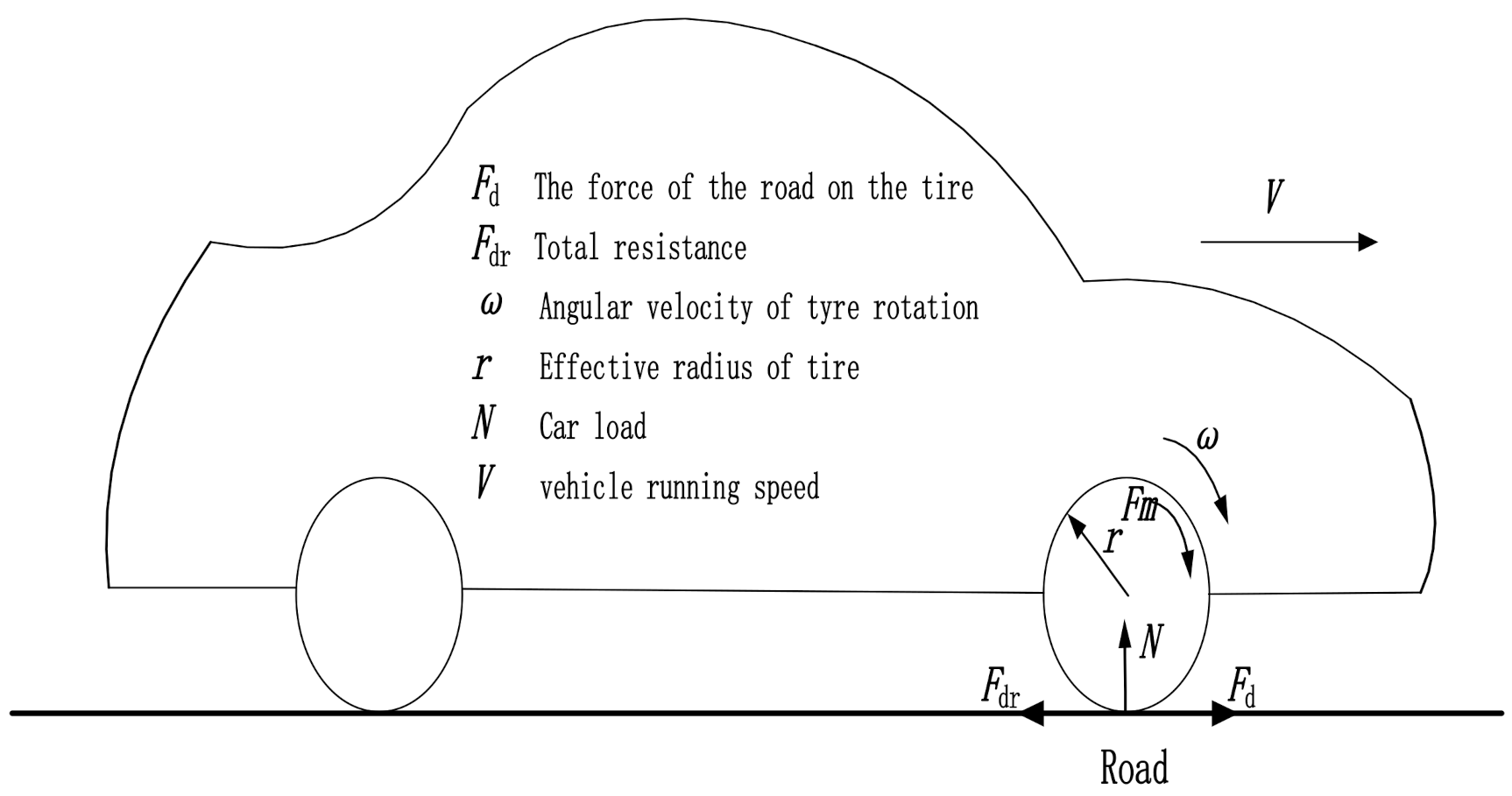
The single-wheel dynamics model is shown in
Figure 1. It only considers the longitudinal linear motion and ignores the influence of the vertical motion and roll of the vehicle. In the figure,
Fm is the driving force of the wheel (N);
J is the equivalent rotational inertia of the wheel (kg·m
2);
ω is the rotational angular velocity of the wheel (rad/s);
r is the effective radius of rotation of the wheel [m];
Fd is the wheel ground Inter-friction force (N) (also known as friction force);
Fdr is the total resistance of the vehicle movement (N), including wind resistance, rolling resistance;
M is the wheel load mass (kg);
V is the longitudinal speed of the vehicle (m/s).
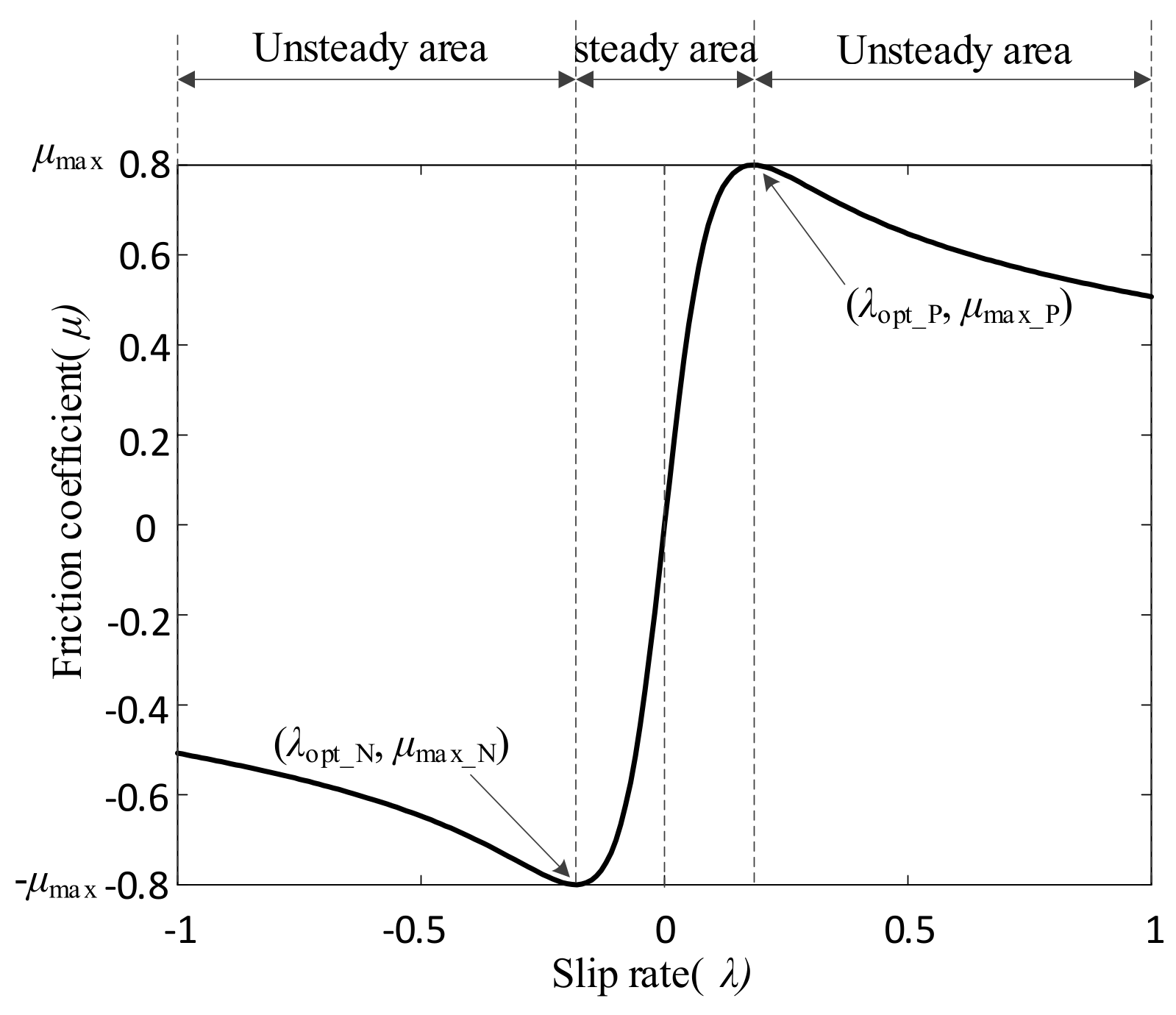
Assuming that the curve (
Figure 2) between the tire-ground adhesion coefficient (
μ) and the slip rate (
λ) is smooth and continuous, the single-wheel dynamic model [
10] can be linearized near the working point. Taking the driving condition of the vehicle as an example, the small-signal linearization processing of the single-wheel dynamics model can be used to obtain the following formula:
Among them,
a = 𝜕𝜇/𝜕
λ,
N is the tire vertical load,
λ is the longitudinal slip rate, defined as shown in Equation (5), and
ε is a small constant to prevent the denominator from being zero.
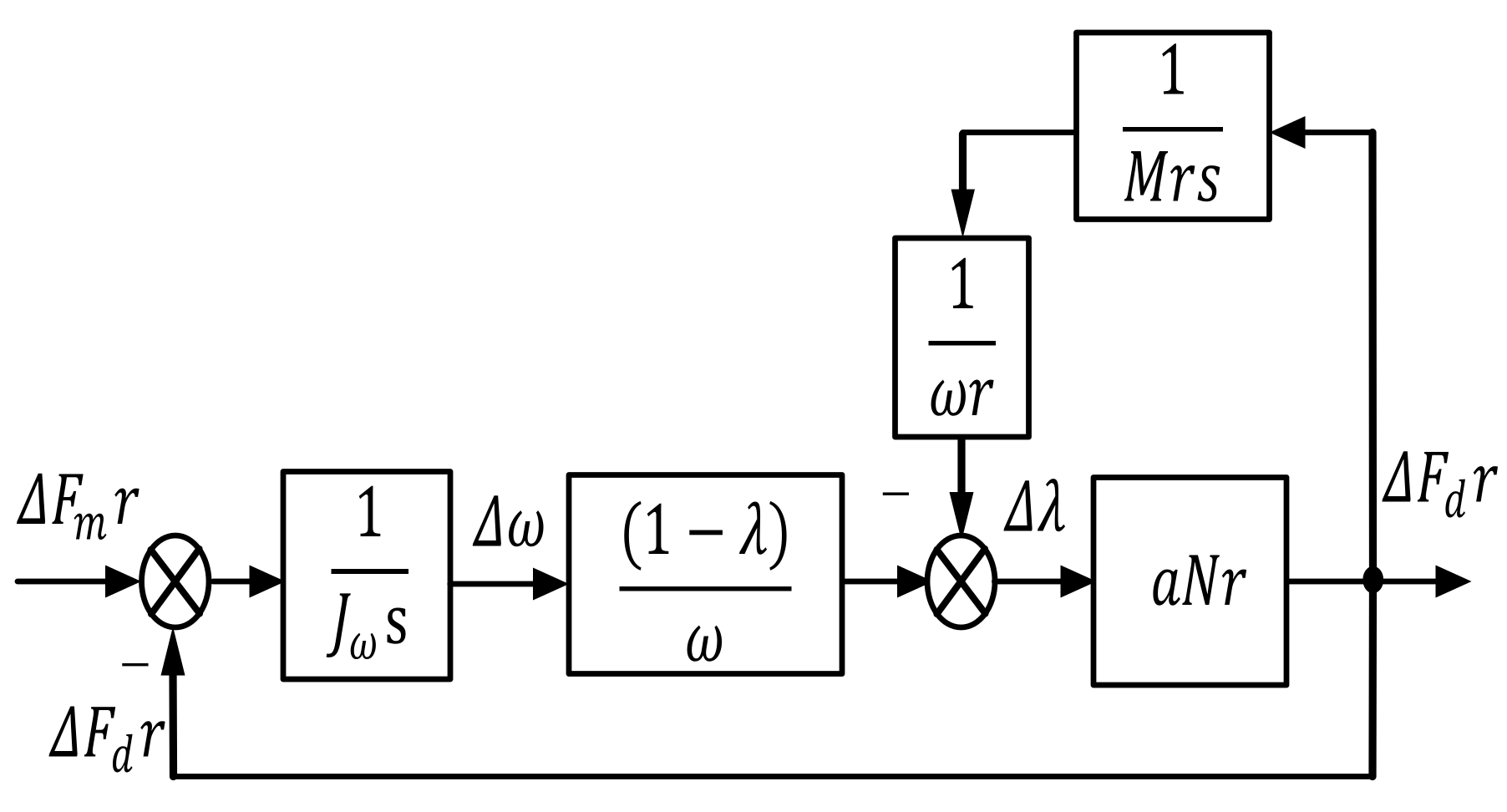
Δ
Fdr is the change of wind resistance, which accounts for a small proportion and can be ignored. By Formulas (1)–(5), the dynamic structure block diagram of vehicle force transmission can be drawn, as shown in
Figure 3.
The relationship between adhesion coefficient and slip rate (
μ −
λ) can be roughly described as shown in
Figure 3.
According to
Figure 2, the force transfer function can be obtained:
In the same way, the transfer function of force transmission under braking conditions can be obtained, and the form is the same as that of traction conditions. In traction conditions, , ; in braking conditions, , .
It can be seen from the equation that the force transmission of different working conditions is a first-order inertial system. When a < 0, τv < 0, the friction force feedback is positive feedback, and the wheel-ground contact cannot achieve stable force transmission. In addition, the time constant (τv) is proportional to the wheel speed and inversely proportional to the slope (a) of the road surface characteristics. When the working point is close to the maximum attachment point, the delay of force transmission increases sharply, and the friction force change approaches zero. This characteristic provides a theoretical basis for predicting the attachment state of the vehicle.
3. Electric Vehicle Skidding Prediction Method Based on Skidding Prediction Factor
3.1. Principles of Electric Vehicle Skidding Prediction Based on Skidding Prediction Factor
In order to predict vehicle skidding, the slip factor shown in Equation (7) is defined:
ε is a normal number that is not zero. Near the operating point, the traction increment can be expressed as:
k is the slope of traction. From Equations (6)–(8), the change of friction force can be obtained as:
In the vicinity of the maximum attachment point, the Taylor series expansion of Equation (9) is carried out. Since
, the higher-order terms can be ignored, and Equation (10) can be obtained:
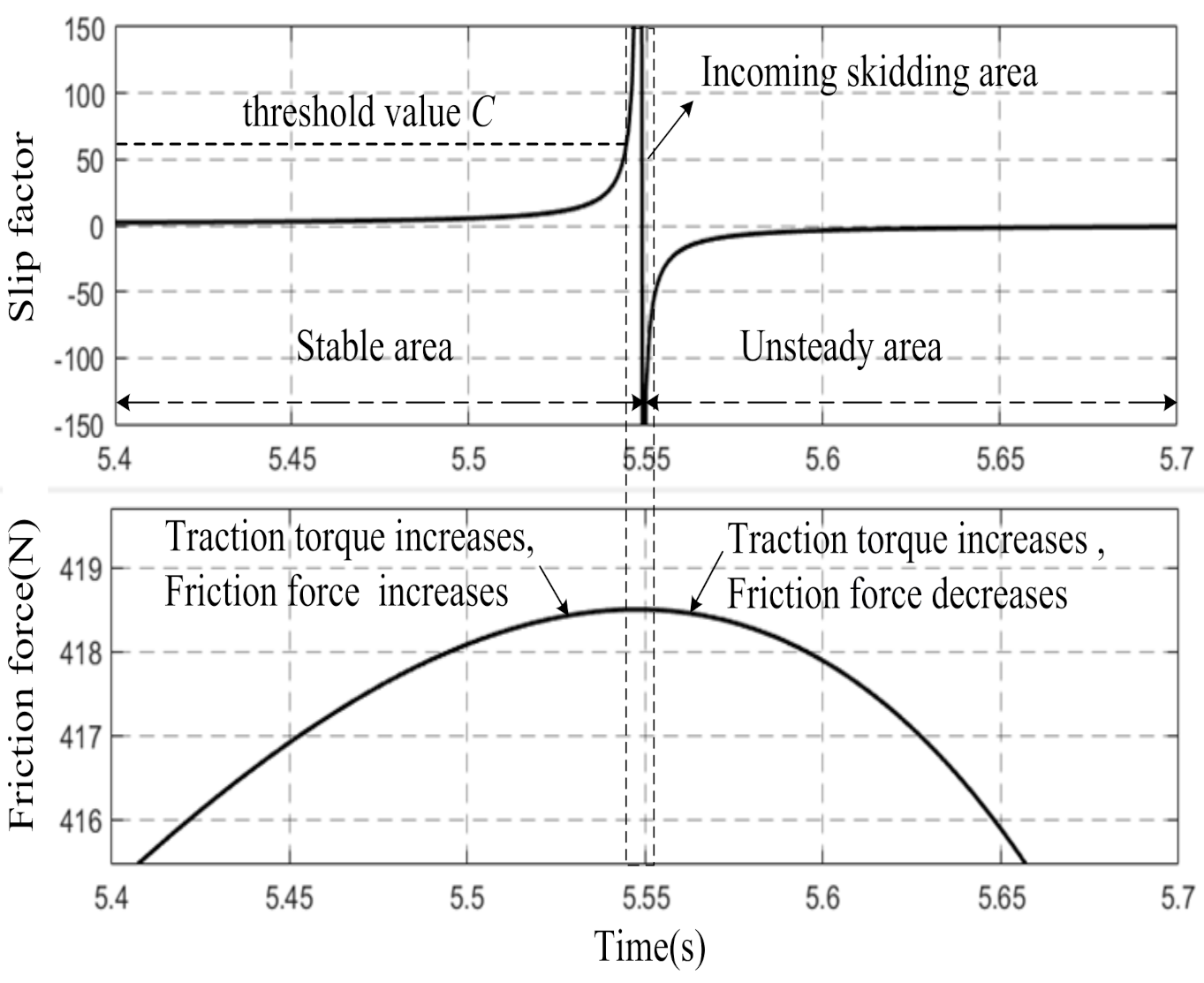
As shown in
Figure 3, as the slip rate becomes larger, but the friction force decreases, it is judged that skidding occurs. In this paper, the slip factor changes, such as a hyperbola, as shown in
Figure 4. At the skidding point, the slip factor tends to be positive infinity, so the skidding can also be judged according to this property. Therefore, the vehicle skidding can be predicted by setting the threshold of the Slip factor. In
Figure 4, the slip factor reaches a maximum at
t = 5.55 s. At this time, the value of a tends to 0, so the slip factor tends to infinity. Among them, the time when the maximum value occurs is related to the vehicle’s motion state, and it is determined by a variety of factors. The slip factor is inversely proportional to the load and the slope of the road surface characteristics, proportional to the wheel speed and inertia. The speed in Equation (10) is the speed at the moment of skidding. Theoretically, skidding can occur at any moment. When the speed is relatively low, the skidding factor is small, so our method is difficult to judge for such working condition as skidding at startup. The simulation proves that it can be judged above 5 km/h. The threshold can be set according to the slip factor value at low speed, or it can be dynamically adjusted according to the wheel speed. When the threshold is constant, the skidding prediction advance time is different at different speeds. The predicted advance time will increase as the vehicle speed increases. High-speed skidding is more harmful, so this feature can meet the needs of anti-skid control.
3.2. Sliding Window Time
The change of the road surface is always uncertain, so it is difficult to analyze window-time caused by the skidding. Here, the window time of skidding caused by the driver’s improper operation is analyzed.
From
Figure 2, the transfer function of slip rate to traction torque can be obtained:
The slip rate increment near the working point is expanded by Taylor series. Considering
, the higher-order terms can be ignored, so that:
The time corresponding to the attachment slope a = 1 to a = 0 is defined as the skidding-window-time. The skidding-window-time represents the interval of time, which is not related to the actual time of skidding occurrence. The longer the interval of time, the greater the time margin predicted by this algorithm. Due to the large inertia of the vehicle, the speed change of the vehicle can be ignored during the skidding-window-time. At the same time, r and J are also constants. It can be seen from Equation (13) that the slip rate changes approximately according to a quadratic curve during the skidding process.
The slip rate change ratio is inversely proportional to the vehicle speed and directly proportional to the slope of traction torque. The lower the vehicle speed and the greater the slip rate change ratio, the shorter the skidding-window-time.
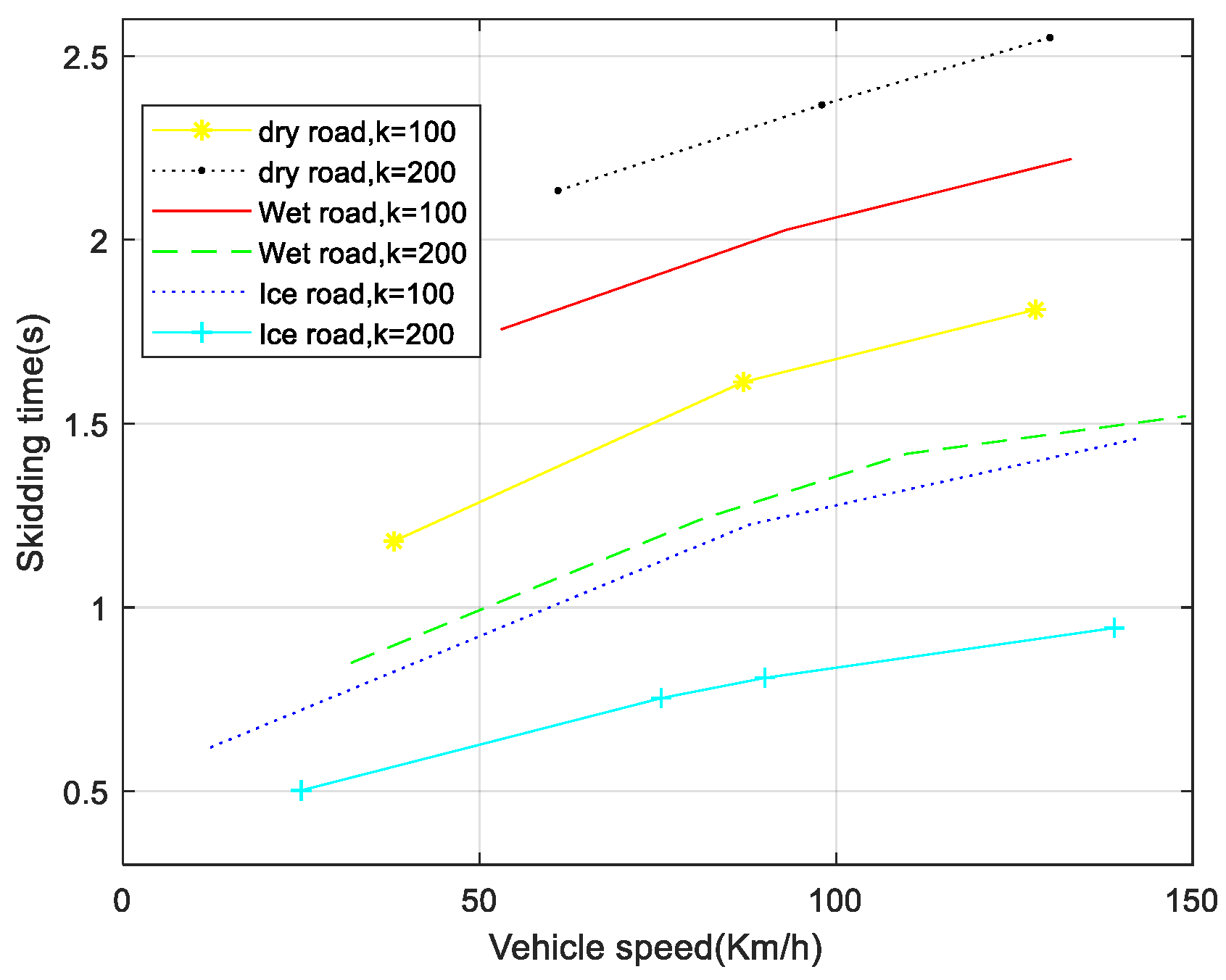
Using the parameters in
Table 1 to carry out co-simulation of MATLAB and CarSim, the time variation curve of the skidding-window-time that can be obtained is shown in
Figure 5. The control variates method is used in the simulation to analyze the effect of parameters. As can be seen:
- (1)
When road surface characteristics are same, the lower speed, the shorter skidding-window-time; the greater traction torque slope, the shorter skidding-window-time.
- (2)
When vehicle speed and traction torque slope are same, the skidding-window-time varies greatly with different road conditions, and the skidding-window-time on icy roads is shorter.
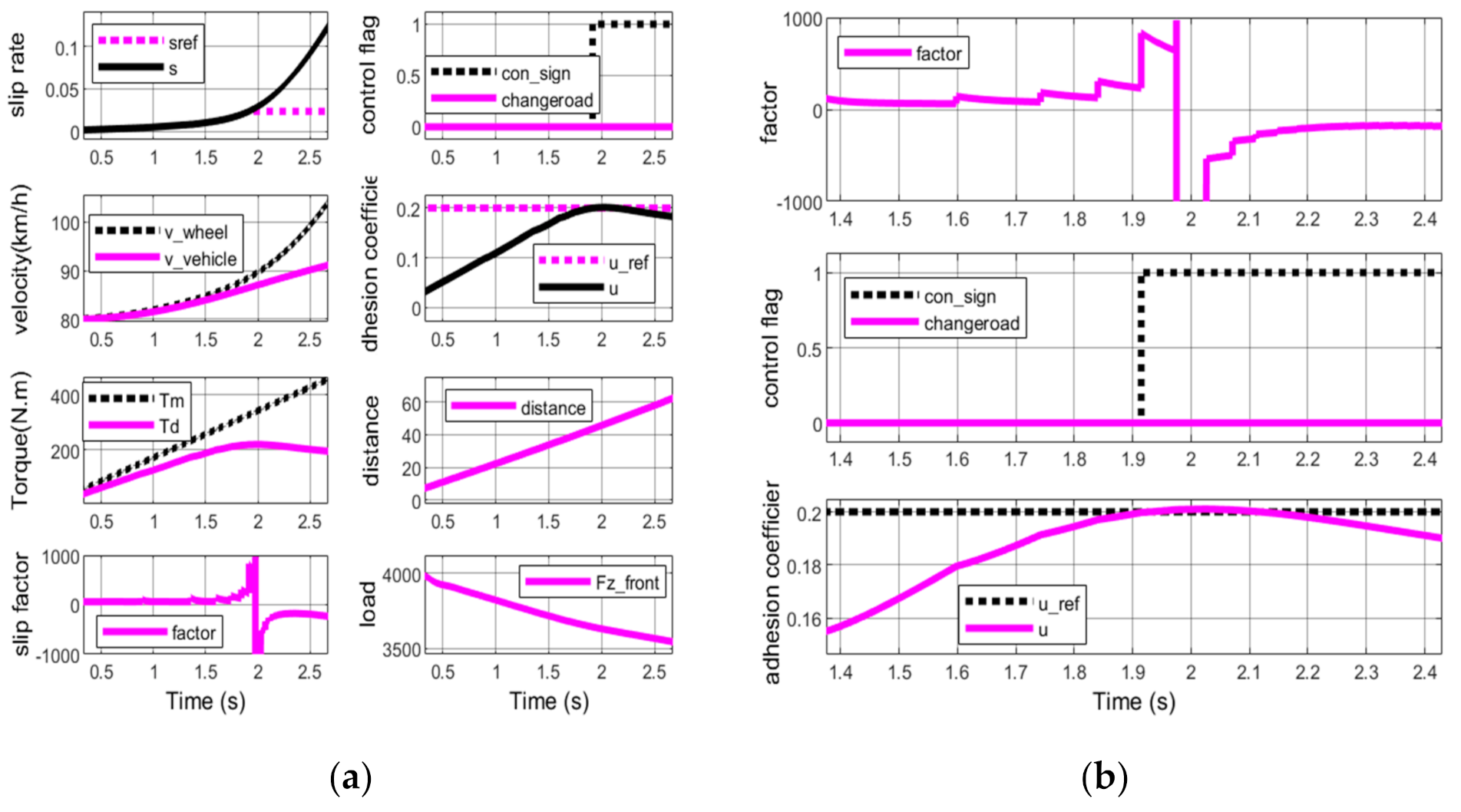
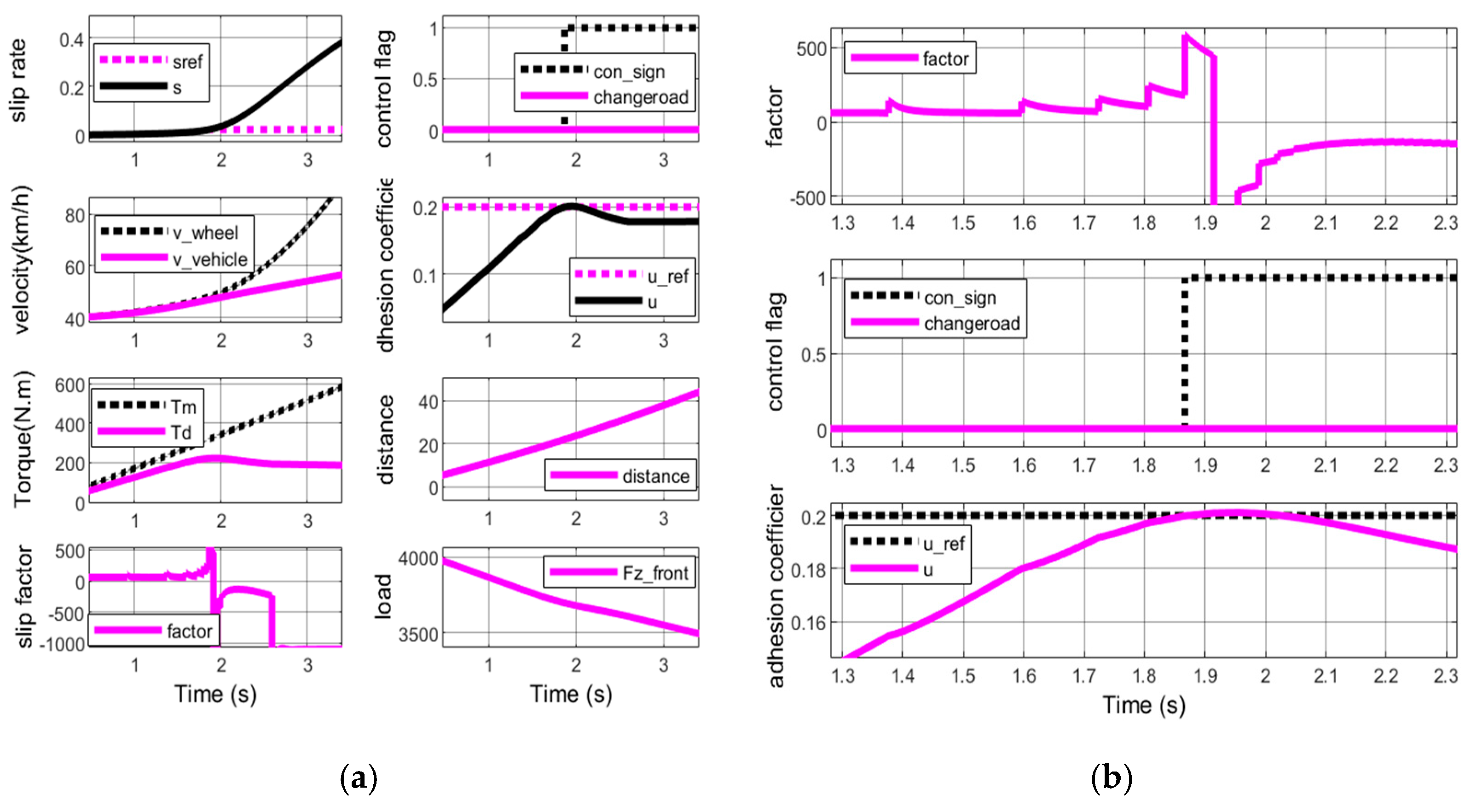
When calculating the slip factor, the observation of friction force requires the use of traction torque and wheel speed. Considering that the slip factor is sensitive to noise, the torque of command is used to calculate it and the observation of friction force. The time constant that characterizes the change of friction force is affected by wheel speed and the slope of road characteristics, and the vibration of friction force will cause drastic changes in the Slip factor. In this paper, an open-loop observer is used to observe the friction force, as shown in Equation (14):
In order to reduce the influence of noise on the differential, the pseudo-differential is used for differential calculation, and the moving average filter is used to retain the steep change of the slip factor.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}