Low-Frequency Road Noise of Electric Vehicles Based on Measured Road Surface Morphology


Abstract
:1. Introduction
2. Establishment of Digital Road Spectrum
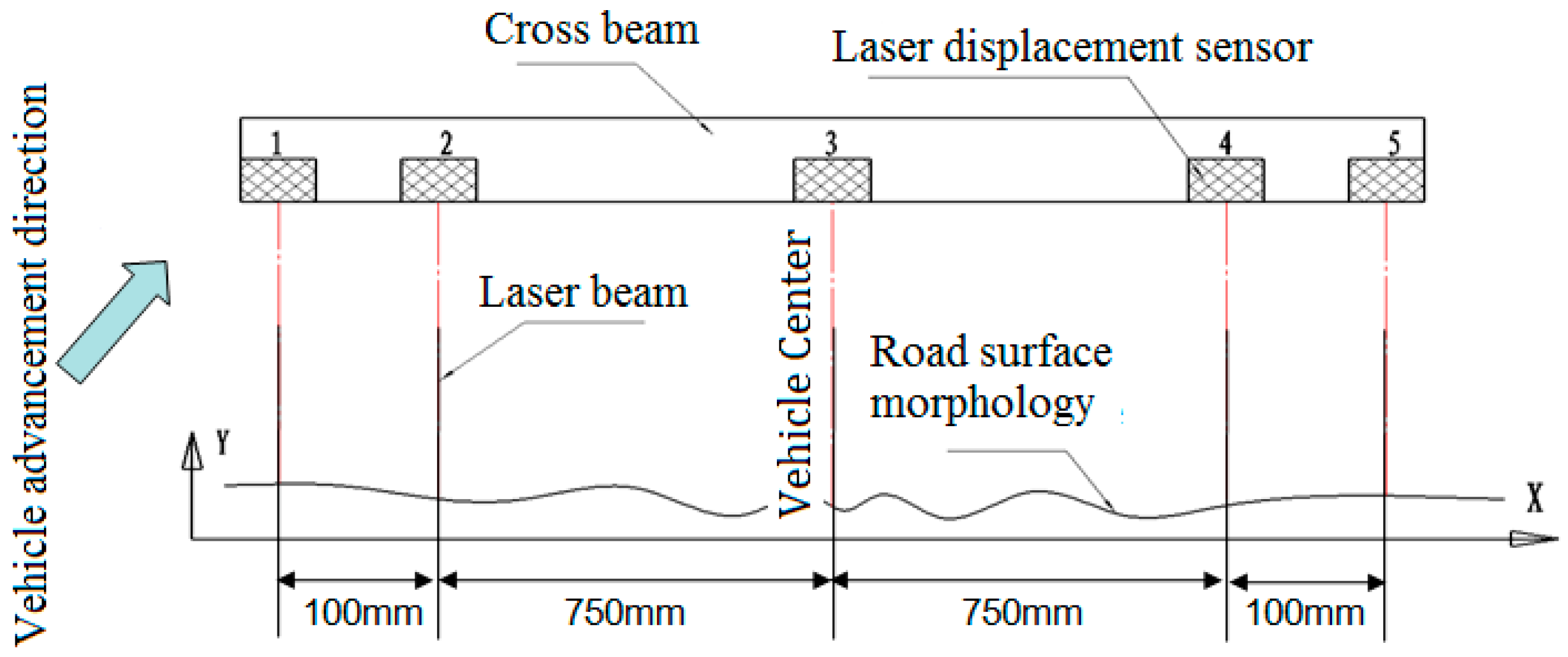
2.1. Typical Noise Vibration Harshness Road Surface Morphology Scanning Acquisition in the Test Field
2.2. Data Processing of Road Surface Morphology
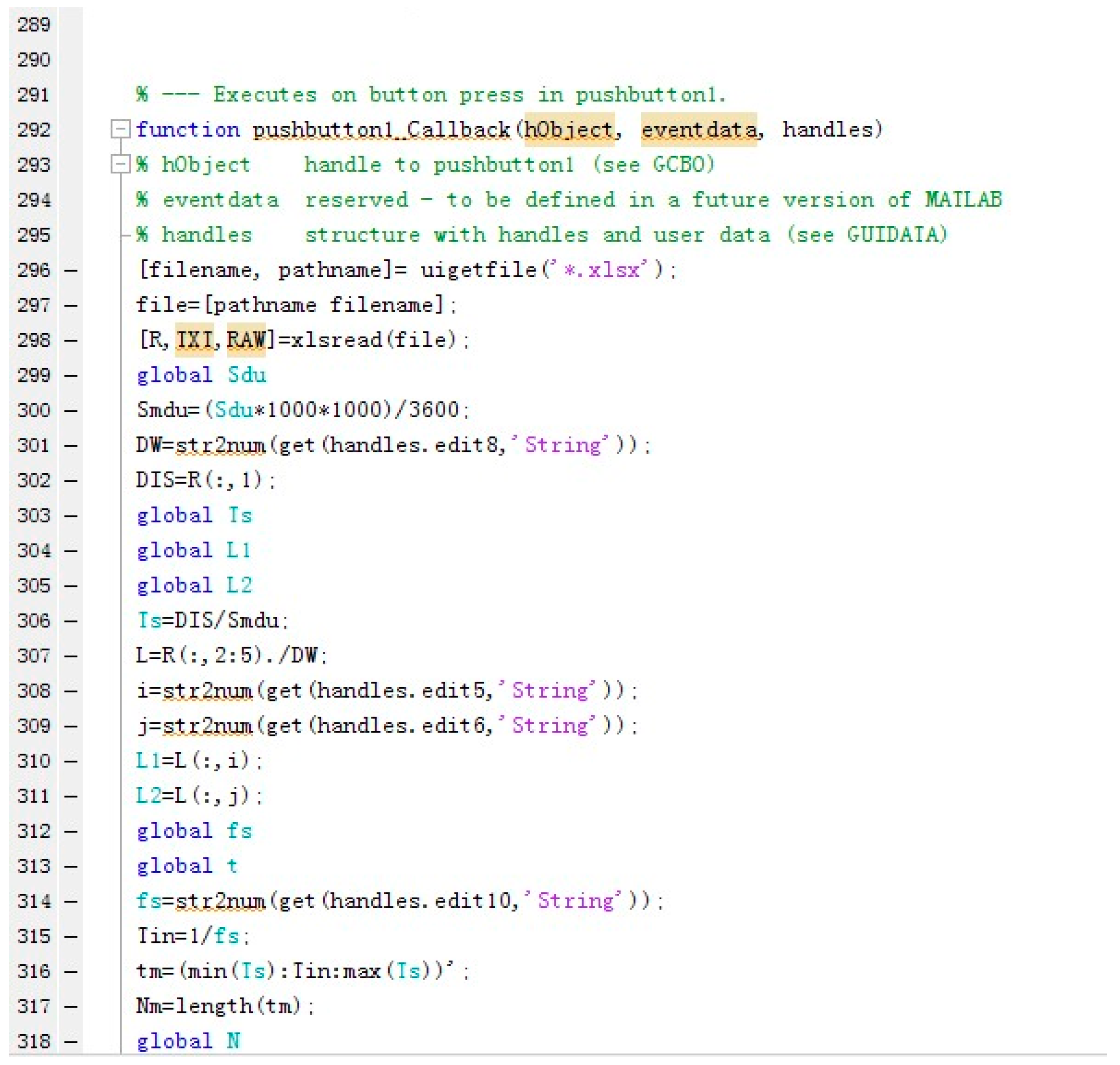
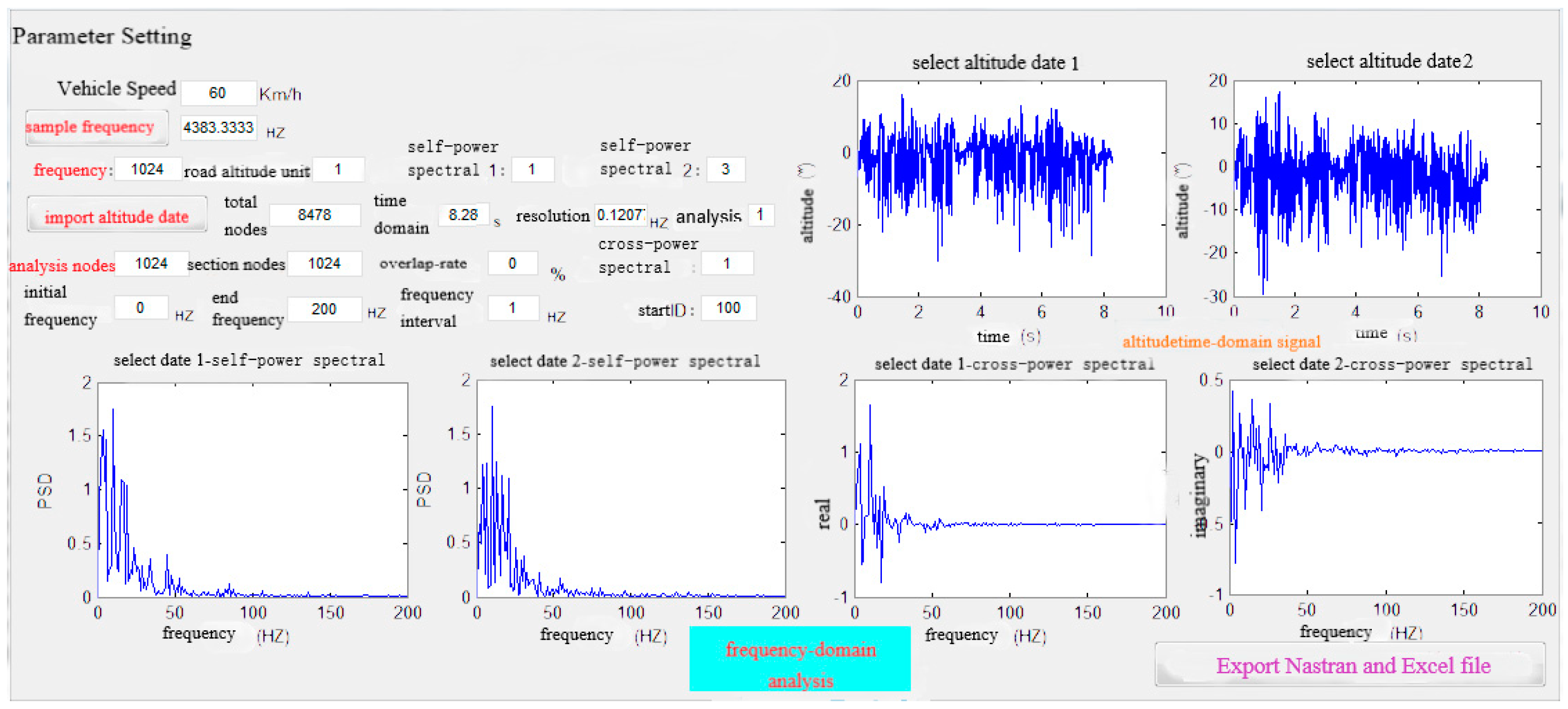
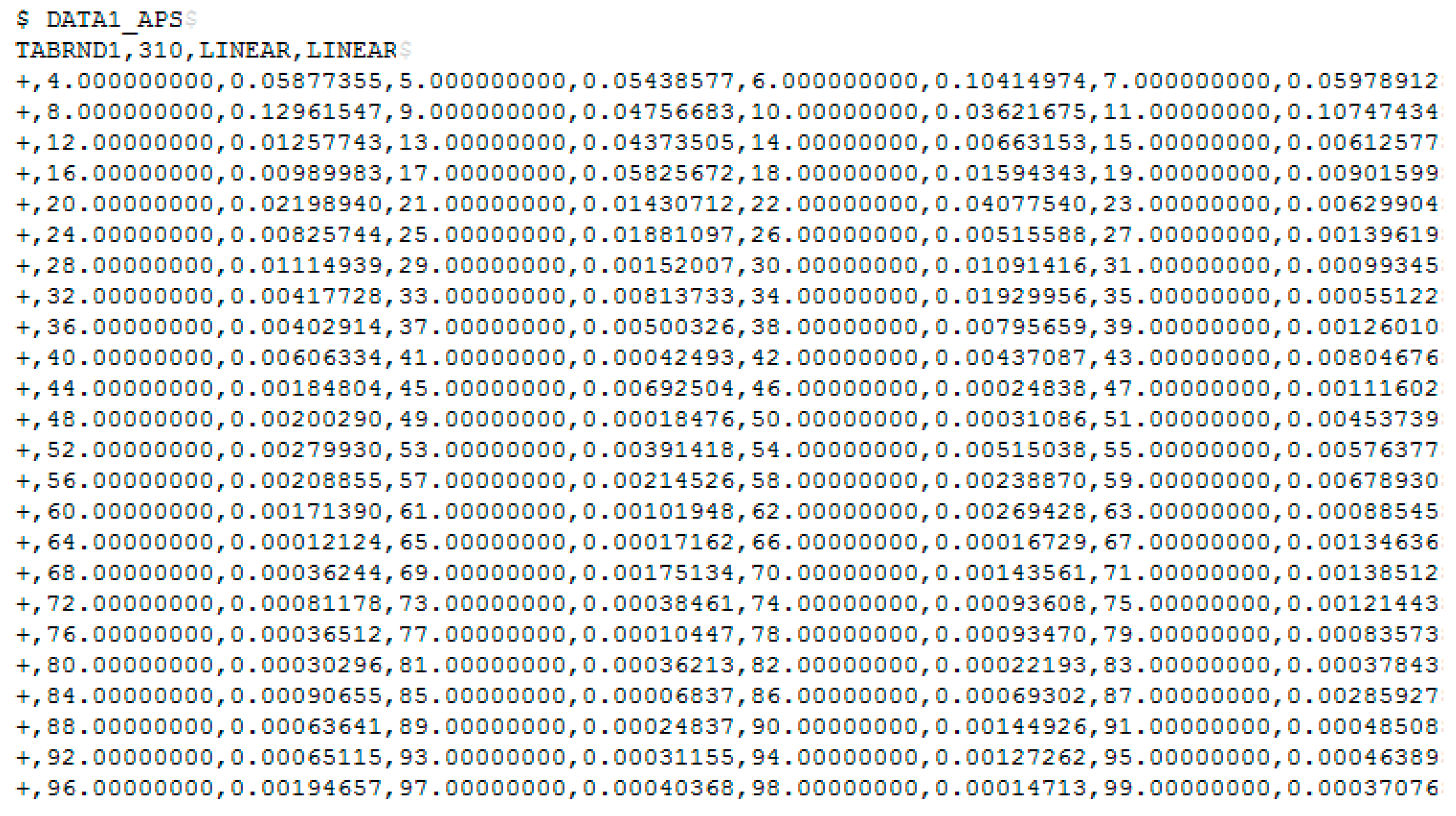
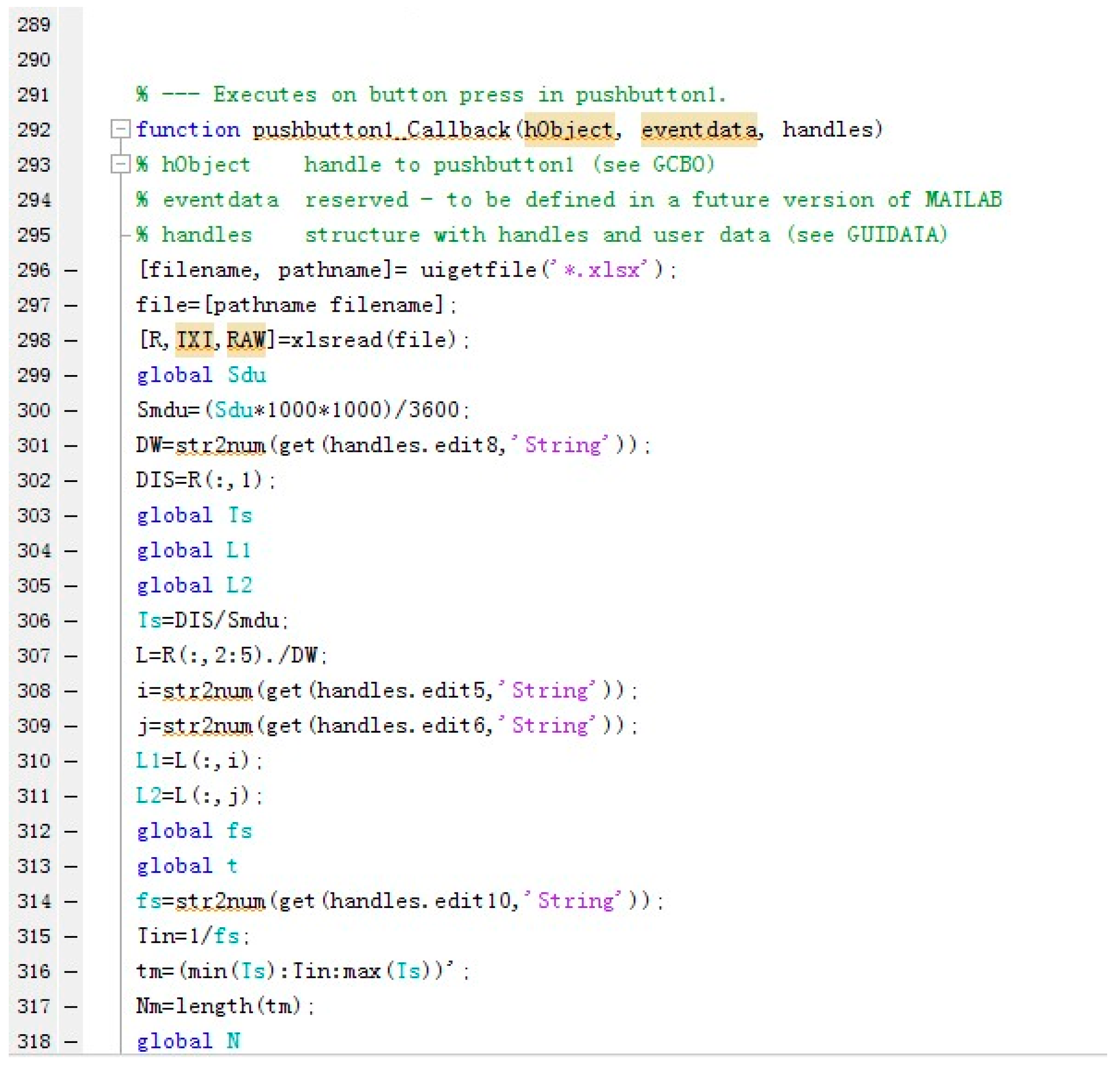
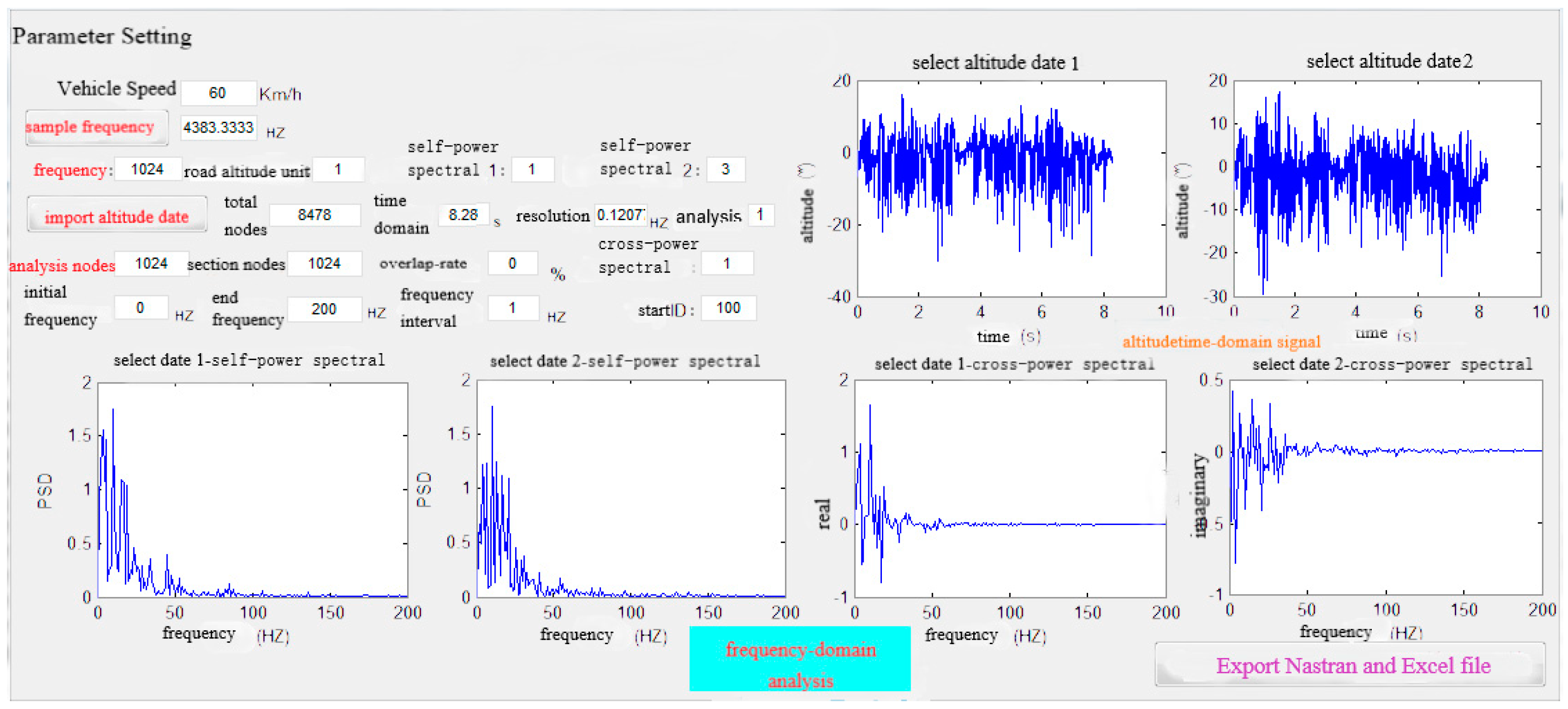
2.3. Road Surface Morphology Data Processing System
3. Calculation of Simulated Road Noise
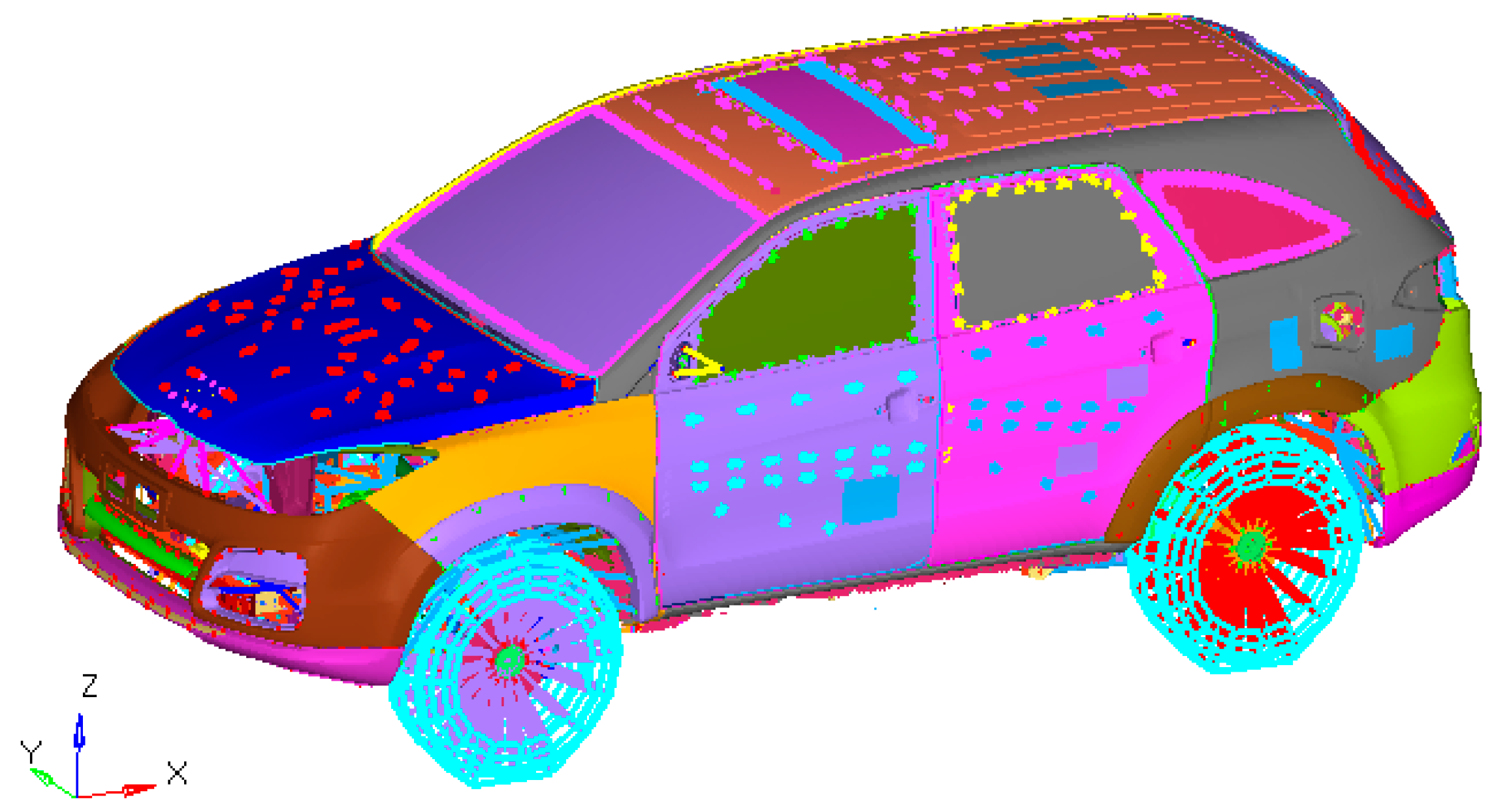
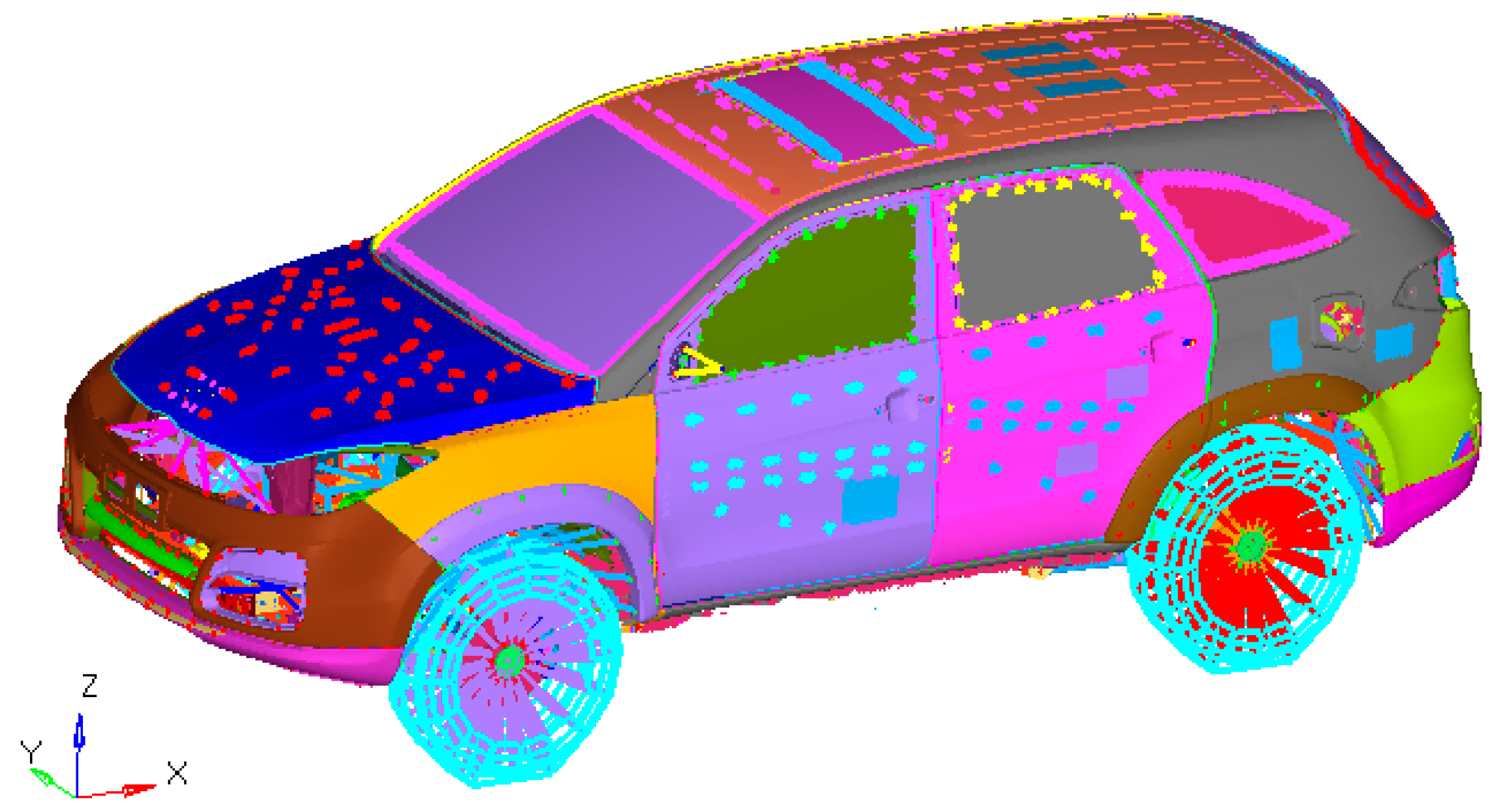
3.1. Establishment of the Finite Element Model for the Electric Vehicle
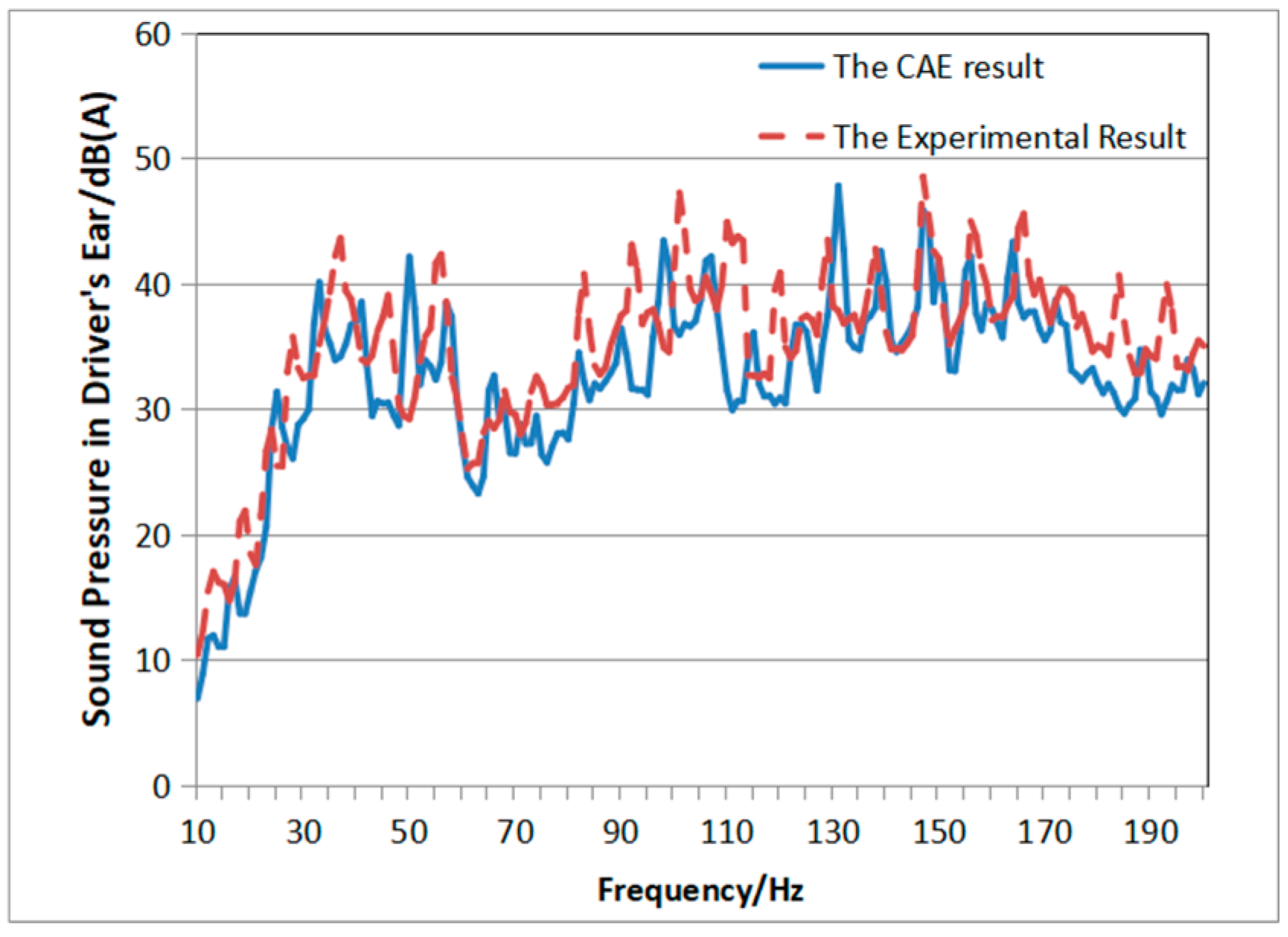
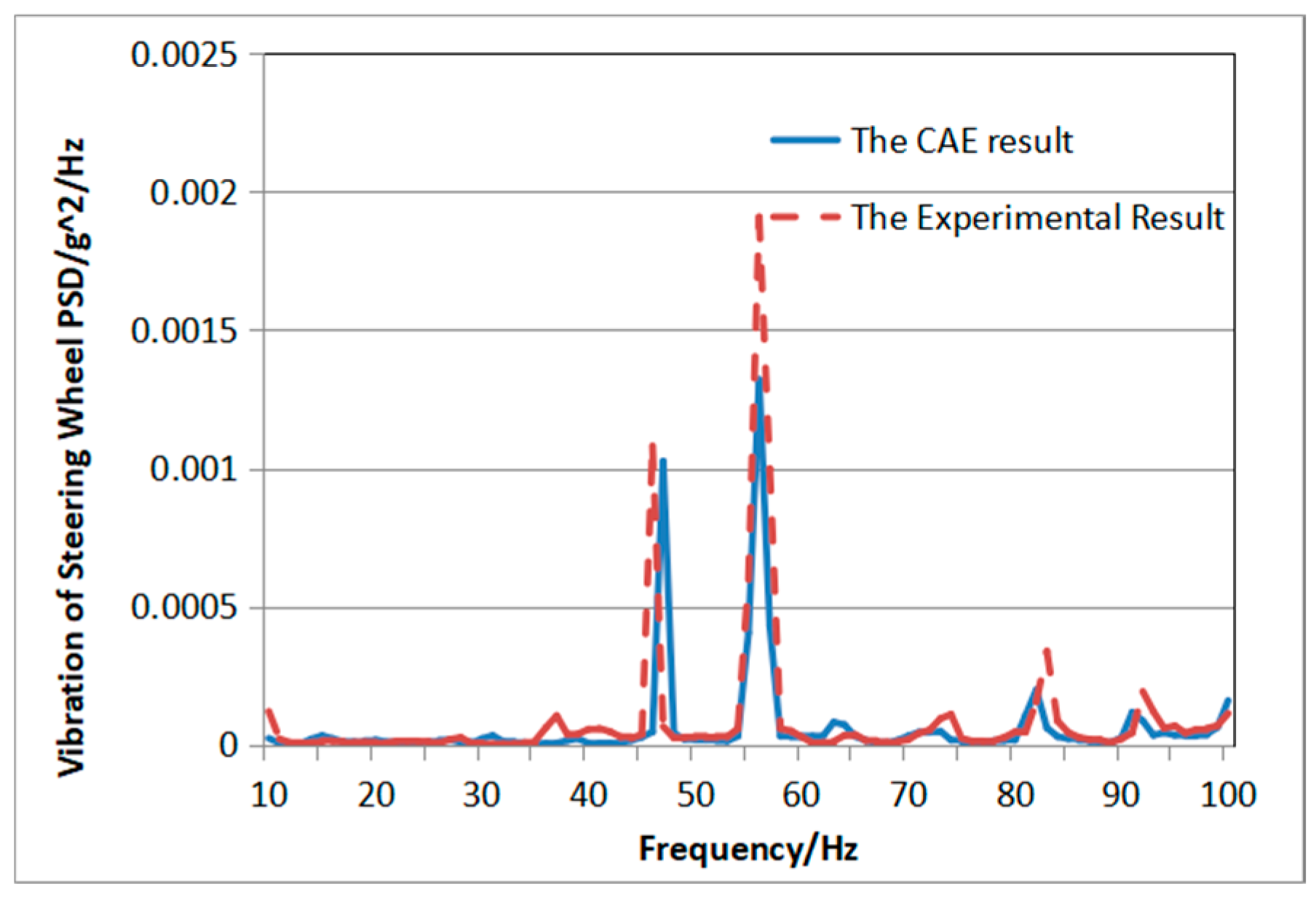
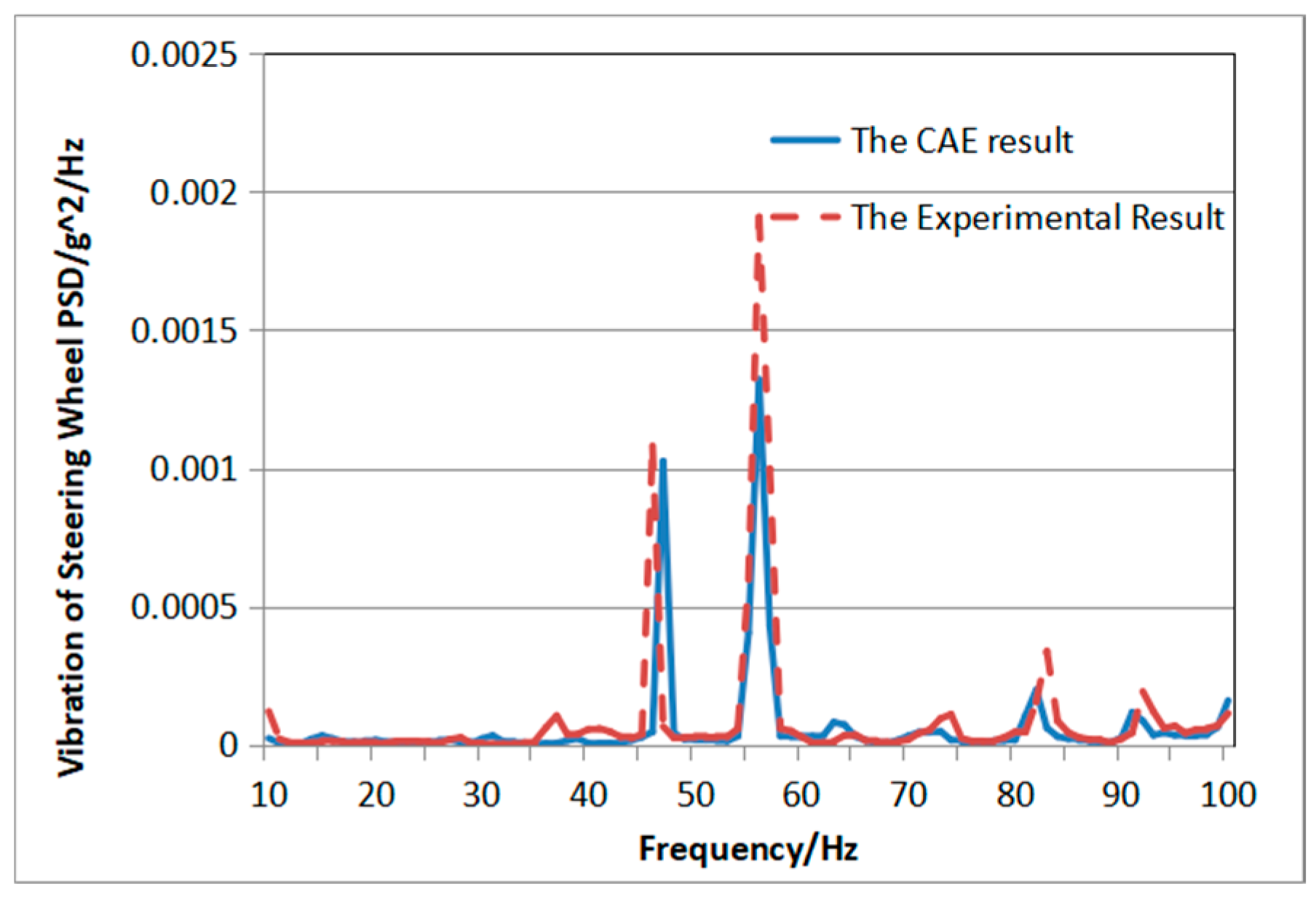
3.2. Simulation Analysis and Experimental Bench-marking of Low-Frequency Road Noise of the Electric Vehicle
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yue, M.Y.; Zhou, Y.D. Research Progress on Vehicle NVH Technology. Appl. Mech. Mater. 2014, 654, 400–403. [Google Scholar] [CrossRef]
- Azadi, S.; Azadi, M.; Zahedi, F. NVH analysis and improvement of a vehicle body structure using DOE method. J. Mech. Sci. Technol. 2010, 23, 2980–2989. [Google Scholar] [CrossRef]
- Sandberg, U.; Ejsmont, J. Tire/road noise-a subject of international concern. In Proceedings-International Conference on Noise Control Engineering; Institute of Noise Control Engineering: San Diego, CA, USA, 1988; p. 1309. [Google Scholar]
- Guo, R.; Yu, Z.; Zuo, S.; Zhou, H. Control and path analysis of airborne noise of fuel cell vehicle. J. Jiangsu Univ. (Nat. Sci. Ed.) 2011, 32, 394–399. [Google Scholar]
- Bérengier, M.C.; Hamet, J.F. Acoustic classification of road pavements: Ranking differences due to distance from the road. Heavy Veh. Syst. 1999, 6, 13–27. [Google Scholar] [CrossRef]
- Licitra, G.; Moro, A.; Teti, L.; Del Pizzo, A.; Bianco, F. Modelling of acoustic ageing of rubberized pavements. Appl. Acoust. 2019, 146, 237–245. [Google Scholar] [CrossRef]
- Losa, M.; Leandri, P.; Licitra, G. Mixture design optimization of low-noise pavements. Transp. Res. Rec. 2013, 2372, 25–33. [Google Scholar] [CrossRef]
- Kindt, P.; Berckmans, D.; De Coninck, F.; Sas, P.; Desmet, W. Experimental analysis of the structure-borne tyre/road noise due to road discontinuities. Mech. Syst. Signal Process. 2009, 23, 2557–2574. [Google Scholar] [CrossRef]
- Zhang, M. Application of Transfer Path Analysis Method in Vehicle NVH Development. In The 3rd National Conference of Local Mechanical Engineering Society and the Cross-Strait Machinery Technology Forum Proceedings; China First Automobile Group Corporation: Sanya, China, 2013; pp. 272–276. [Google Scholar]
- Tan, J.; Du, J.; Li, H. Optimization Control of Passenger Car Pavement Noise Based on Transmission Path Analysis. Automob. Technol. 2017, 3, 19–23. [Google Scholar]
- Shivle, S.; Arora, G. Methodology of Road Noise Analysis and Improvement Strategy for Passenger Cars; SAE Paper 2006-01-1094; SAE International: Warrendale, PA, USA, 2006. [Google Scholar]
- Li, L.; Wang, Z. Research on simulation method of low-frequency road noise based on modal tires. In Proceedings of the Annual Meeting of China Automotive Engineering Society, Shanghai, China, 5–7 June 2014; pp. 1328–1331. [Google Scholar]
- Chen, C.; Sun, W. Study on Simulation Analysis of Vehicle Interior Noise Caused by Pavement Excitation. J. Vib. Shock 2008, 08, 102–105. [Google Scholar]
- Cha, M.; Su, X.; Wang, D. Prediction and Analysis of Low Frequency Noise in Vehicles under Road Excitation. Manuf. Autom. 2015, 37, 78–81. [Google Scholar]
- Lu, F.; Chen, S. Time Domain Modeling and Simulation of Vehicle Pavement Excitation. Automot. Eng. 2015, 37, 549–553. [Google Scholar]
- Mucka, P. Simulated Road Profiles According to ISO 8608 in Vibration Analysis. J. Test. Eval. 2018, 46, 405–418. [Google Scholar]
- Zhang, H. Automotive System Dynamics; Tongji University Press: Shanghai, China, 1996. [Google Scholar]
- Frosina, E.; Senatore, A.; Andreozzi, A.; Fortunato, F.; Giliberti, P. Experimental and Numerical Analyses of the Sloshing in a Fuel Tank. Energies 2018, 11, 682. [Google Scholar] [CrossRef]
- Zhang, S.; Meng, X.; Feng, T.; Zhang, T. Dynamics Analysis and Numerical Simulations of a Stochastic Non-Autonomous Predator-Prey System with Impulsive Effects. Nonlinear Anal.-Hybrid Syst. 2017, 26, 19–37. [Google Scholar] [CrossRef]
- Kandala, A.; Mezzacapo, A.; Temme, K.; Takita, M.; Brink, M.; Chow, J.M.; Gambetta, J.M. Hardware-Efficient Variational Quantum Eigensolver for Small Molecules and Quantum Magnets. Nature 2017, 549, 242–246. [Google Scholar] [CrossRef] [PubMed]
- Ding, D.; Wang, Z.; Ho, D.W.C.; Wei, G. Distributed Recursive Filtering for Stochastic Systems Under Uniform Quantizations and Deception Attacks through Sensor Networks. Automatica 2017, 78, 231–240. [Google Scholar] [CrossRef]
- Lu, L.; Jia, Y.; Liu, W.; Yang, L. Mixed Stimulus-Induced Mode Selection in Neural Activity Driven by High and Low Frequency Current Under Electromagnetic Radiation. Complexity 2017, 7628537. [Google Scholar] [CrossRef]
- Yu, D.; Liu, H.; Bresser, C. Peak Load Management Based On Hybrid Power Generation and Demand Response. Energy 2018, 163, 969–985. [Google Scholar] [CrossRef]
- Peng, W.; Maleki, A.; Rosen, M.A.; Azarikhah, P. Optimization of a Hybrid System for Solar-Wind-Based Water Desalination by Reverse Osmosis: Comparison of Approaches. Desalination 2018, 442, 16–31. [Google Scholar] [CrossRef]
- Rong, B.; Xiao, P.; Zhou, J. Reconstruction and Contrast Analysis of 3D Virtual Pavement of Strengthened Road in a Test Site. Automot. Eng. 2017, 39, 214–219. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
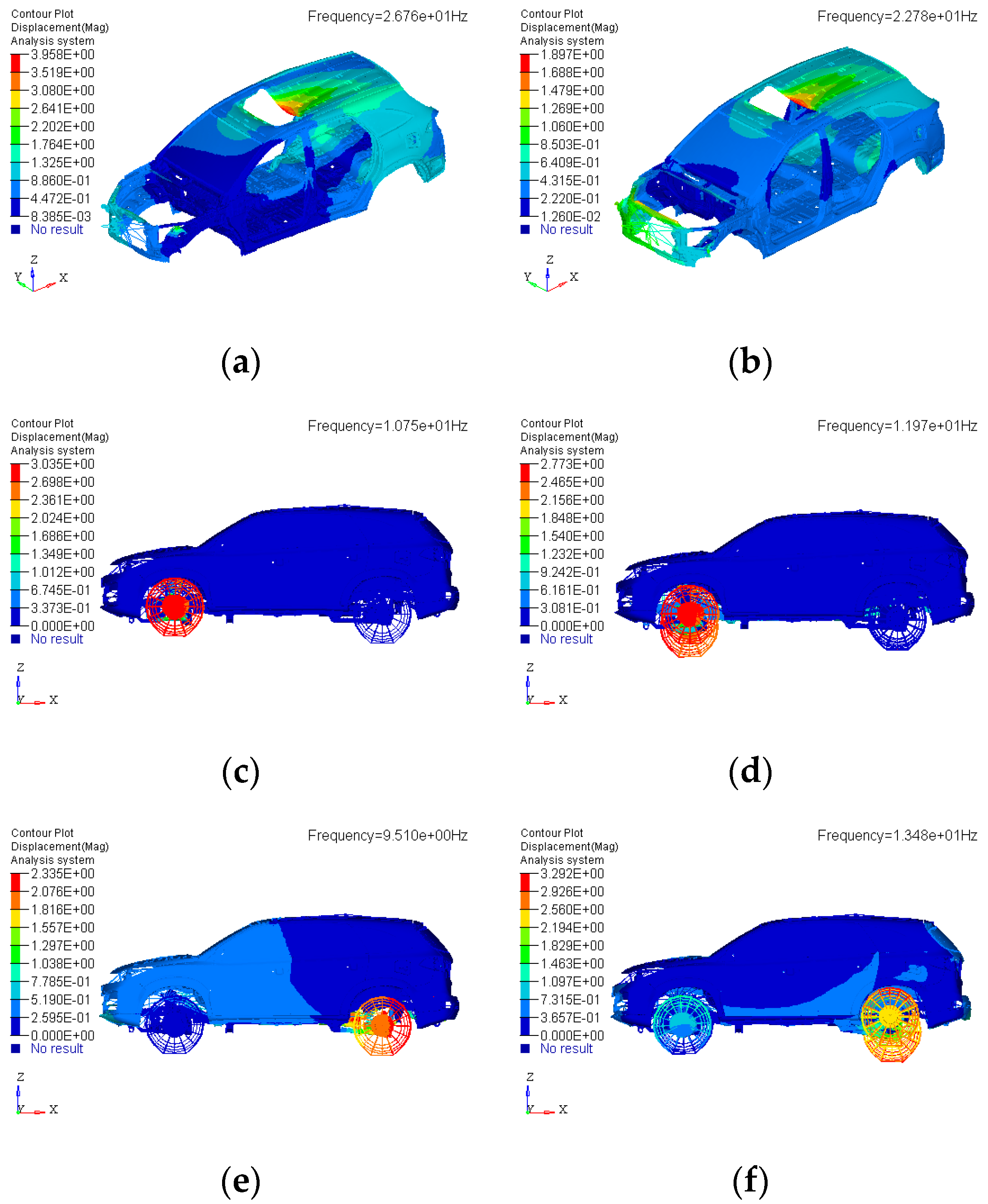
| Modal Mode | Simulation Analysis Results/Hz | Test Result/Hz | Error (Simulation-Test)/Test | |
|---|---|---|---|---|
| Body | Body torsion | 26.76 | 27.03 | −1.00% |
| Body bending | 22.78 | 23.69 | −3.84% | |
| Front suspension | Codirectional jump of the front suspension | 10.75 | 10.45 | 2.87% |
| Reverse jump of the front suspension | 11.97 | 12.21 | −1.97% | |
| Rear suspension | Codirectional jump of the rear suspension | 9.51 | 9.35 | 1.71% |
| Reverse jump of the rear suspension | 13.48 | 14.48 | −6.91% | |
| Steering system | Steering wheel first order vertical | 29.93 | 31.32 | −4.44% |
| Steering wheel first order transverse | 37.12 | 38.1 | −2.57% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Z.; Cheng, D.; Huang, X. Low-Frequency Road Noise of Electric Vehicles Based on Measured Road Surface Morphology. World Electr. Veh. J. 2019, 10, 33. https://doi.org/10.3390/wevj10020033
Yu Z, Cheng D, Huang X. Low-Frequency Road Noise of Electric Vehicles Based on Measured Road Surface Morphology. World Electric Vehicle Journal. 2019; 10(2):33. https://doi.org/10.3390/wevj10020033
Chicago/Turabian StyleYu, Zhenqi, Dong Cheng, and Xingyuan Huang. 2019. "Low-Frequency Road Noise of Electric Vehicles Based on Measured Road Surface Morphology" World Electric Vehicle Journal 10, no. 2: 33. https://doi.org/10.3390/wevj10020033
APA StyleYu, Z., Cheng, D., & Huang, X. (2019). Low-Frequency Road Noise of Electric Vehicles Based on Measured Road Surface Morphology. World Electric Vehicle Journal, 10(2), 33. https://doi.org/10.3390/wevj10020033