Auxiliary Power Supply System for Electric Power Steering (EPS) and High-Heat-Resistant Lithium-Ion Capacitor †

 ,
,
Abstract
:
1. Introduction
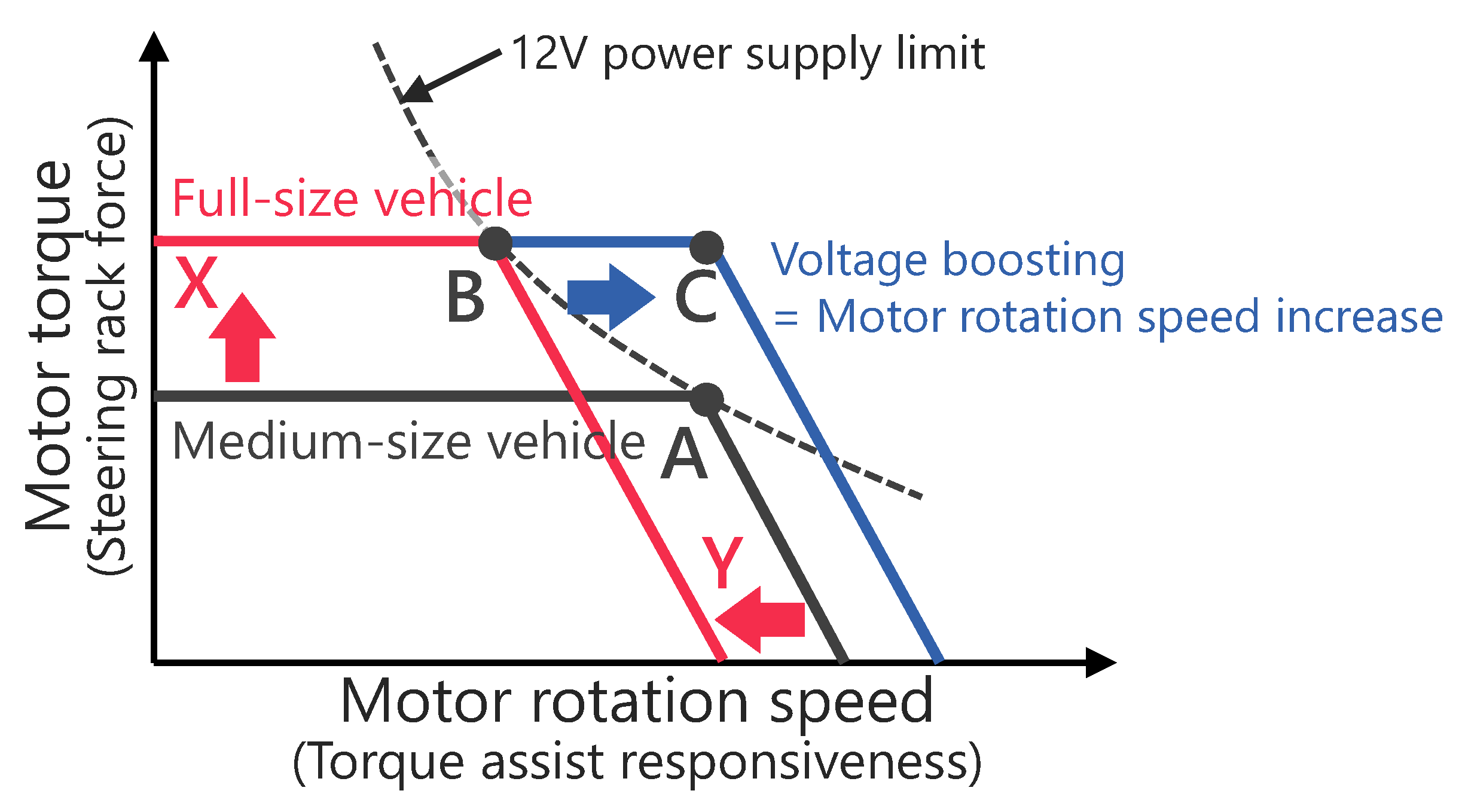
- Elimination of the torque-assist delay during abrupt steering and stationary steering
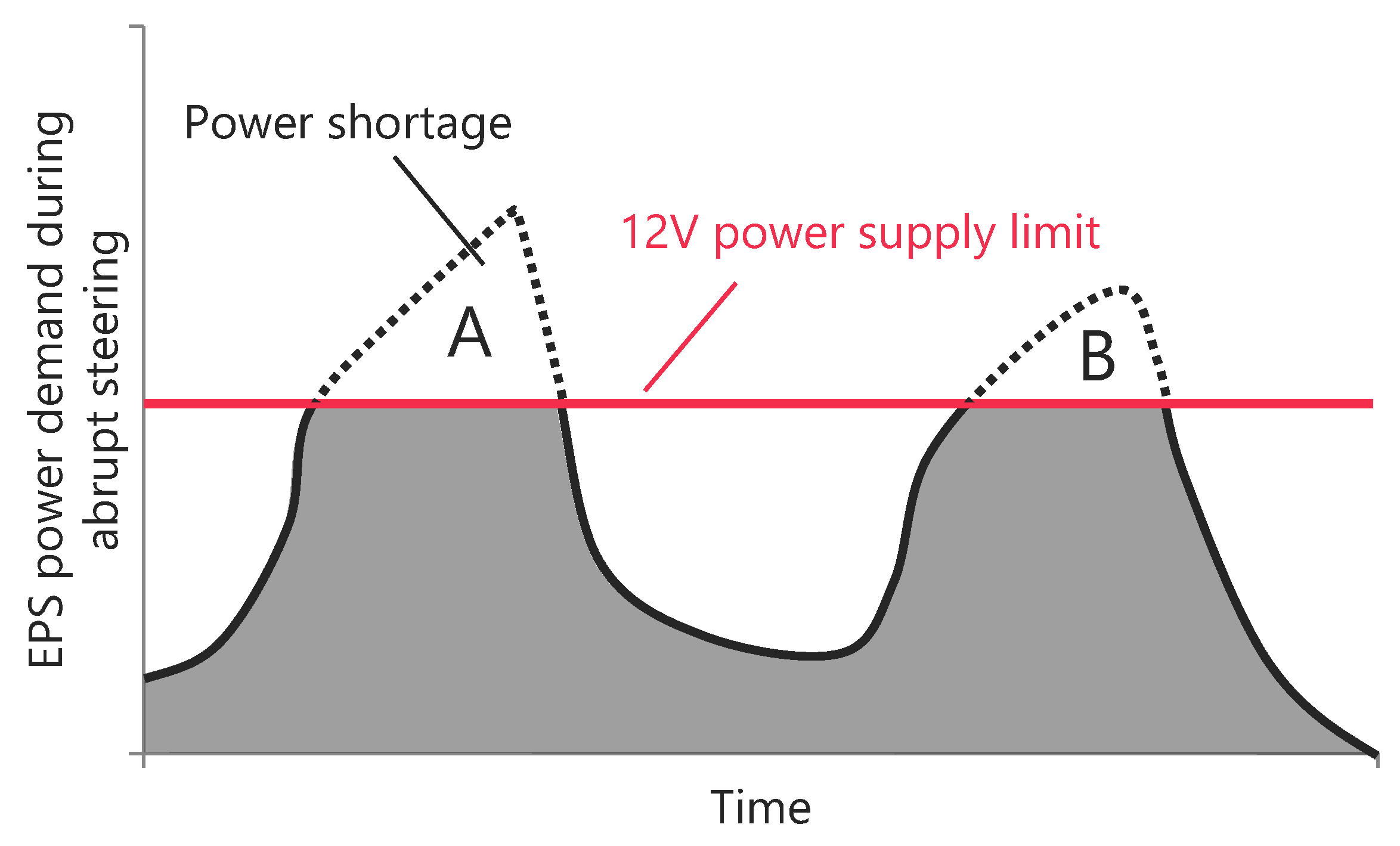
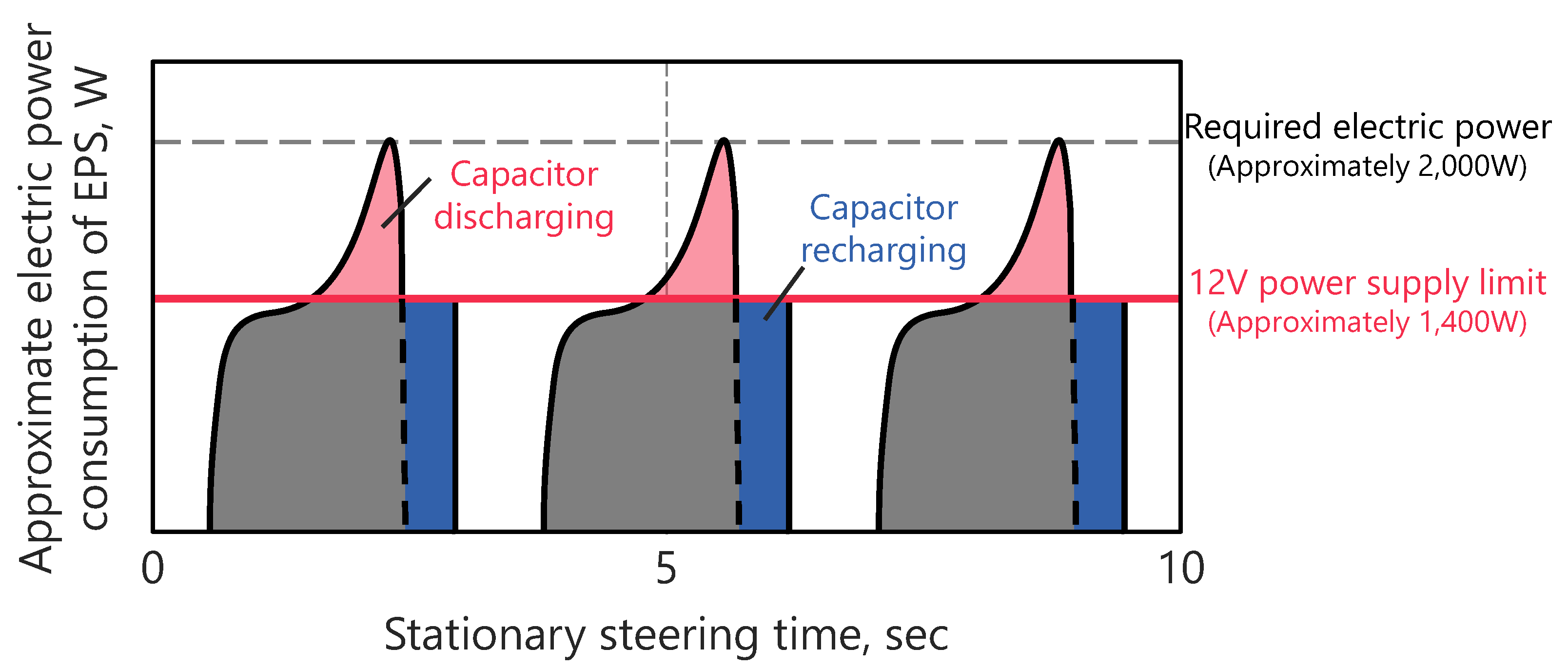
- Peak cut of the electric power consumption during abrupt steering and stationary steering
- Redundant power supply in case of 12 V power supply failure
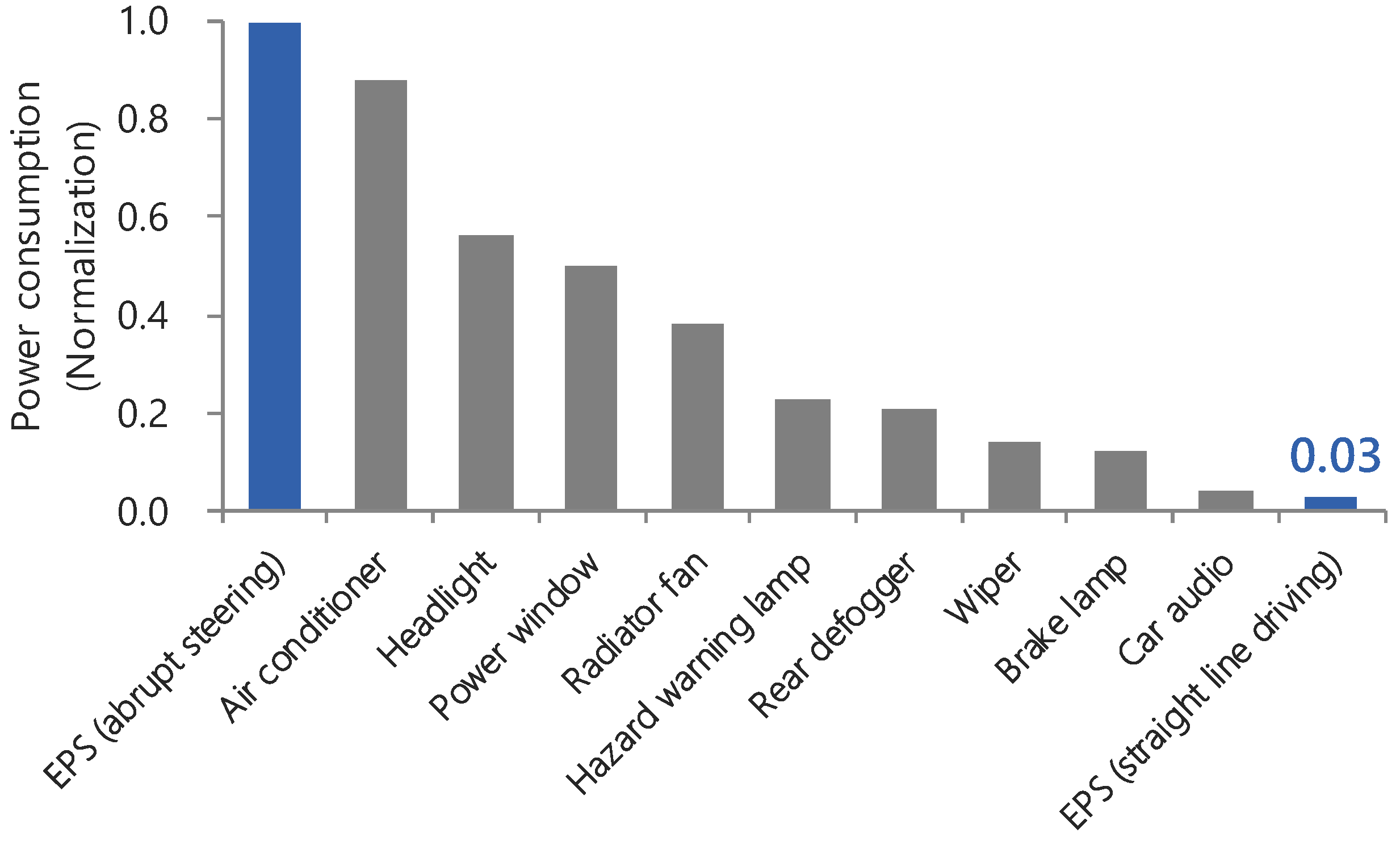
2. EPS Electric Power Consumption
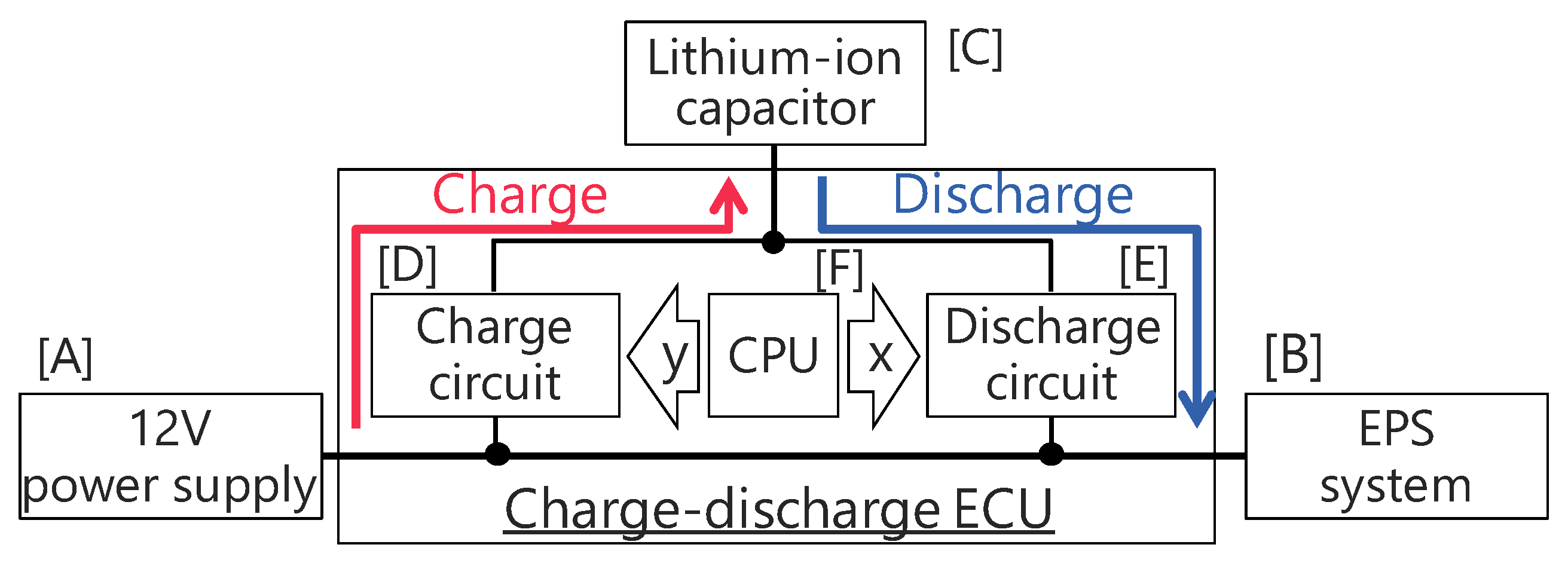
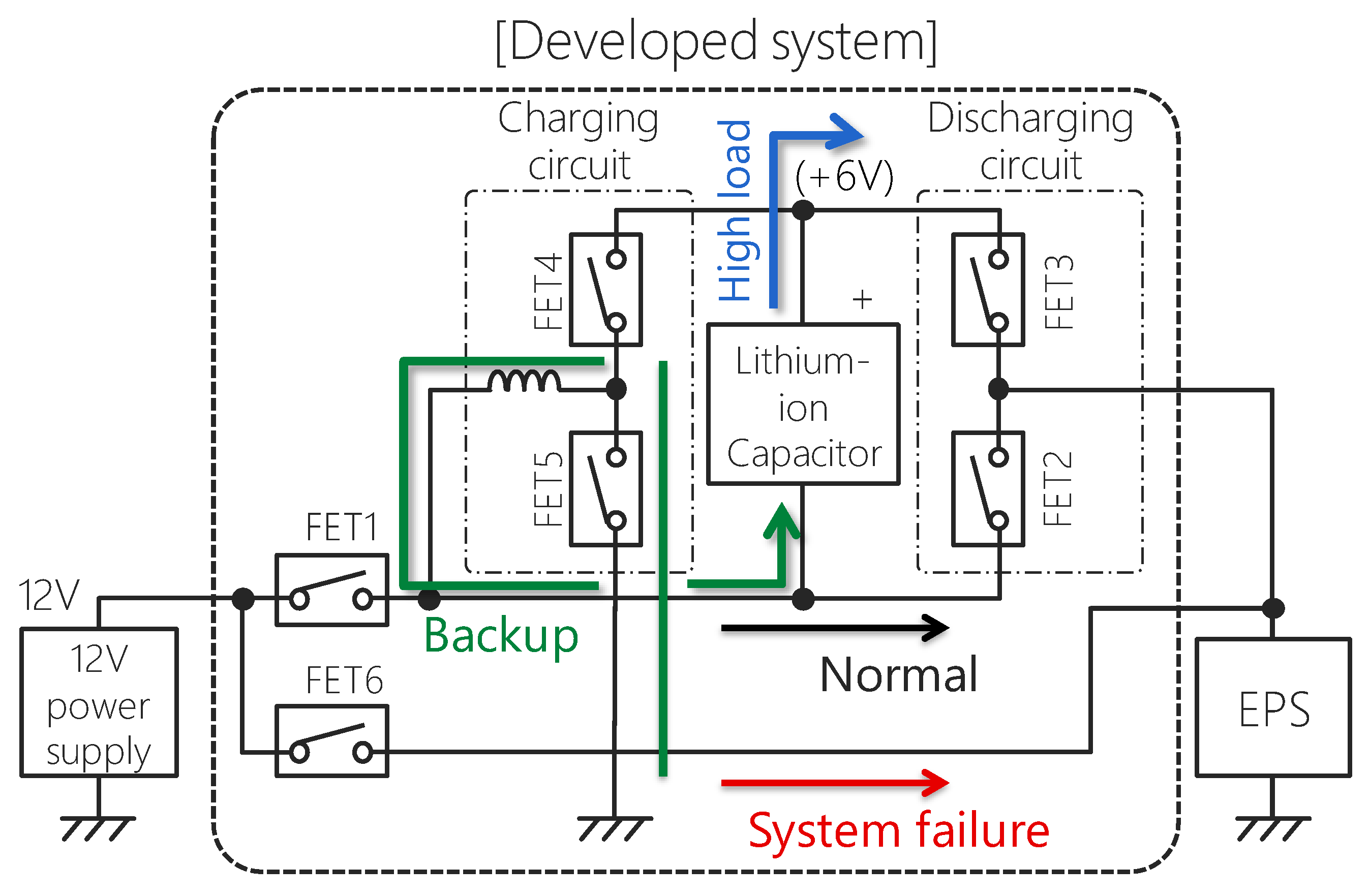
3. The Configuration of Auxiliary Power Supply System for EPS
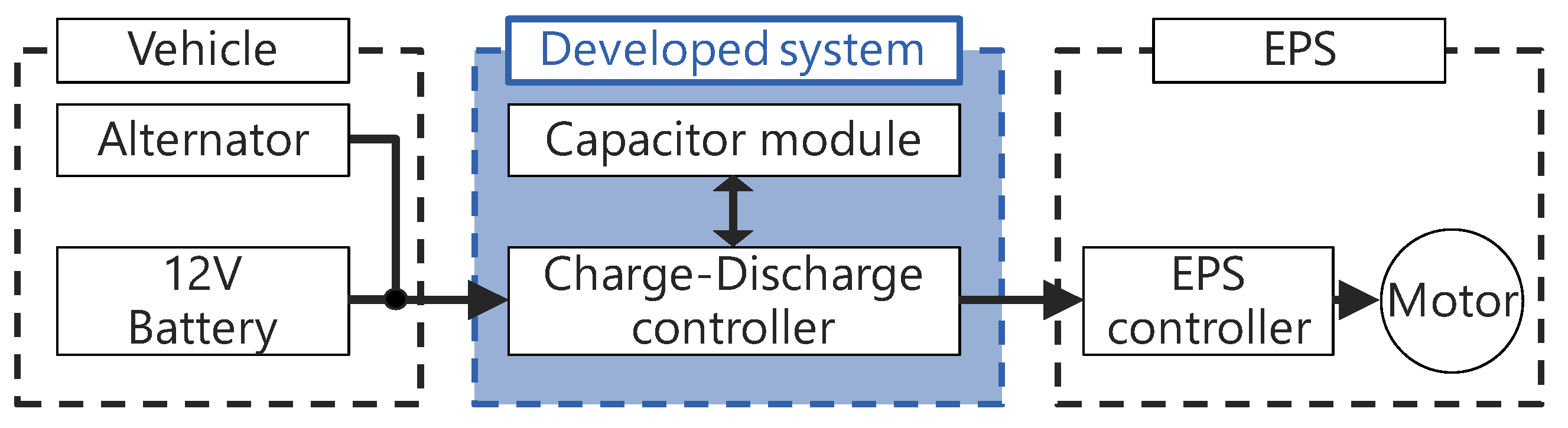
3.1. System Summary
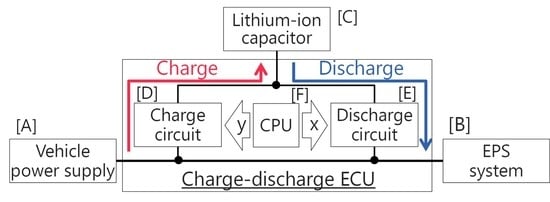
3.2. Block Diagram and Control Method, Design of Capacitance of Capacitor
4. Mechanism of High Power Output
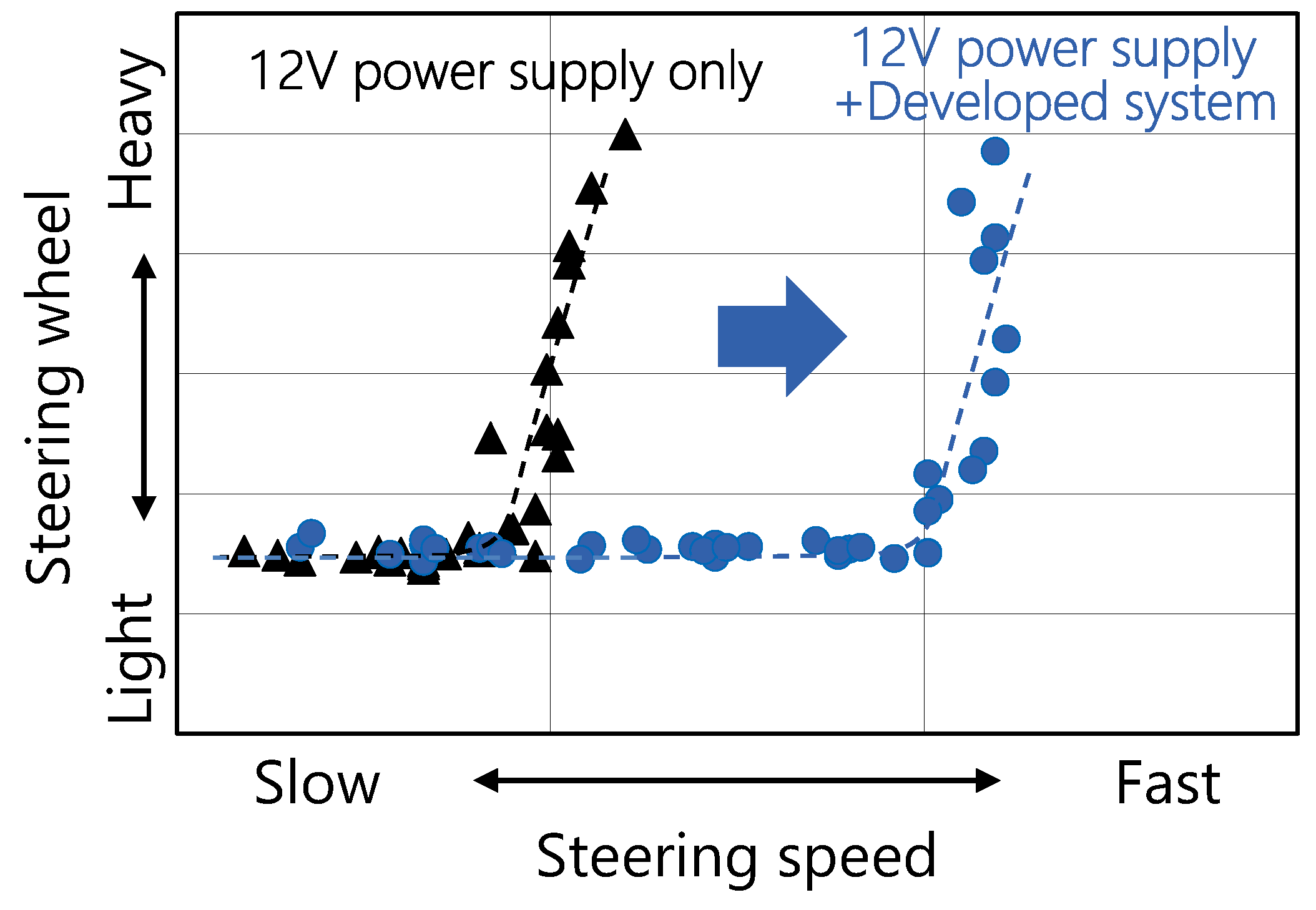
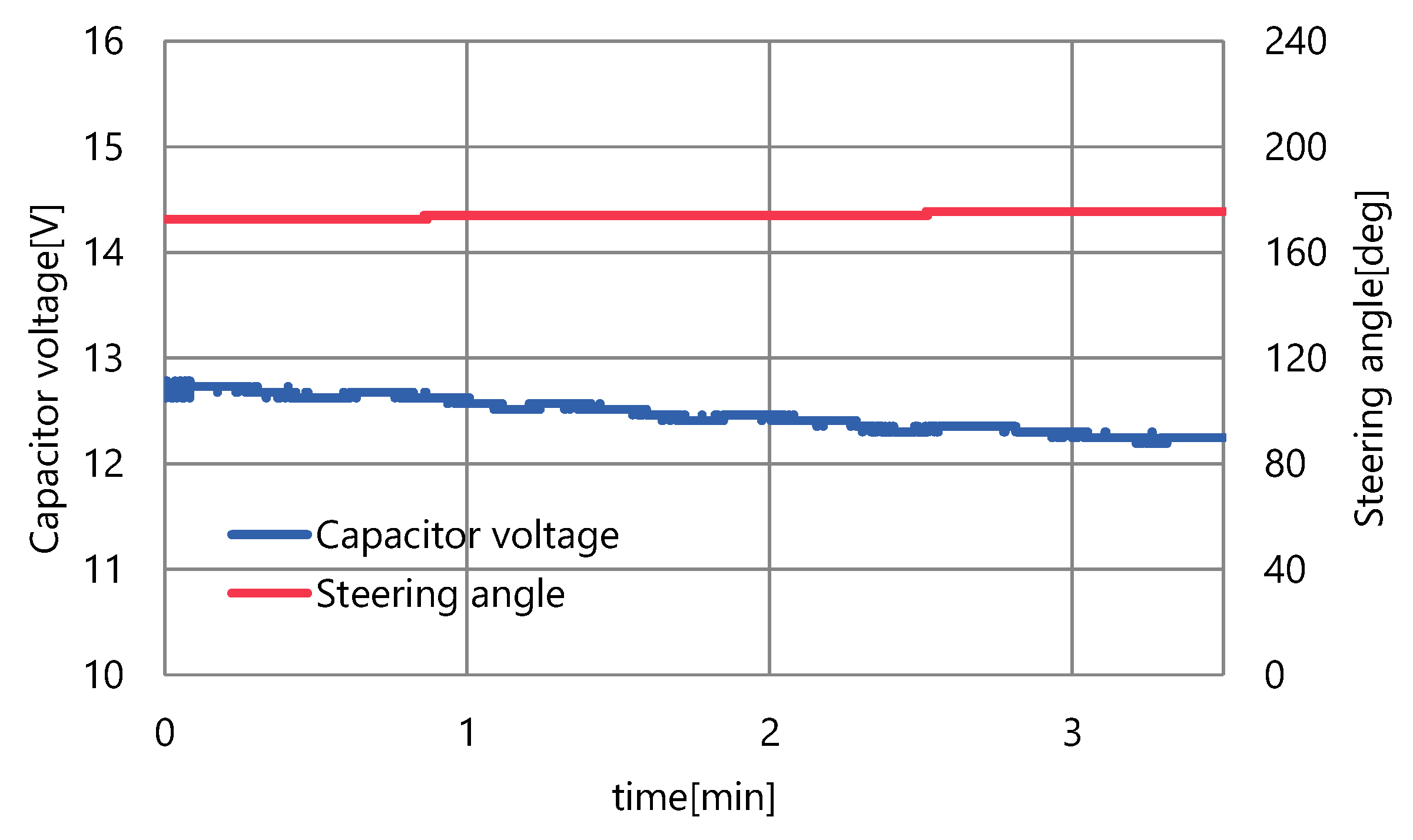
5. Actual Vehicle Evaluation
Testing Method
- Steer with only 12 V power supply.
- Steer with 12 V power supply + developed system(lithium-ion capacitor 2 cells; voltage boost + 6 V).
6. Adaptation of Electrical Power Storage Device in Vehicle Environment
6.1. Lithium-Ion Capacitor
6.2. Development of High-Heat-Resistant Lithium-Ion Capacitor
7. Implementation Items
8. Test Specimen and Testing Method
8.1. Test Specimen
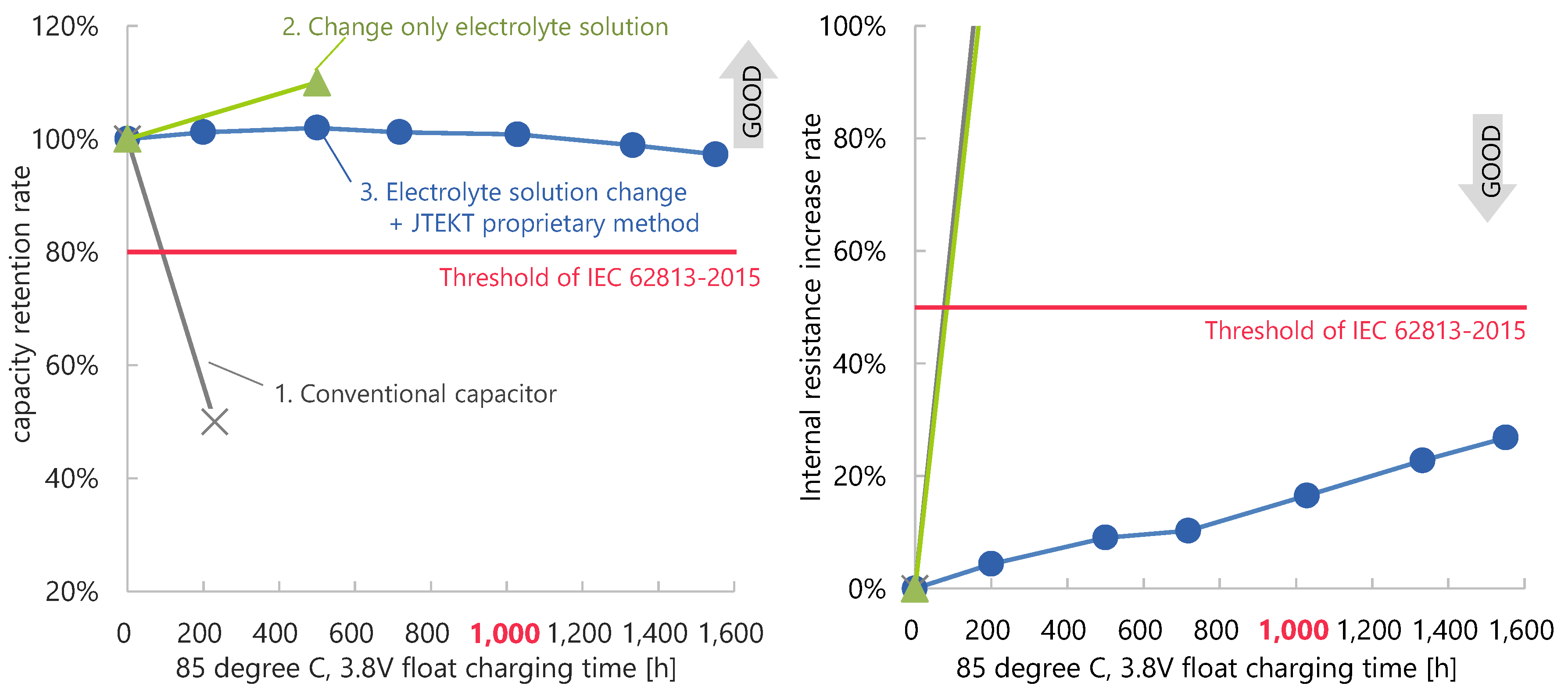
- Conventional capacitor using electrolyte solution in which 1.0 mol/L of LiPF6 was dissolved(ethylene carbonate (EC):ethyl methyl carbonate (EMC):dimethyl carbonate (DMC) = 3:4:3)
- Change only electrolyte solution
- Change electrolyte solution and JTEKT proprietary method
8.2. Heat Resistance Evaluation
8.3. Evaluation of Large Current Charge–Discharge Properties
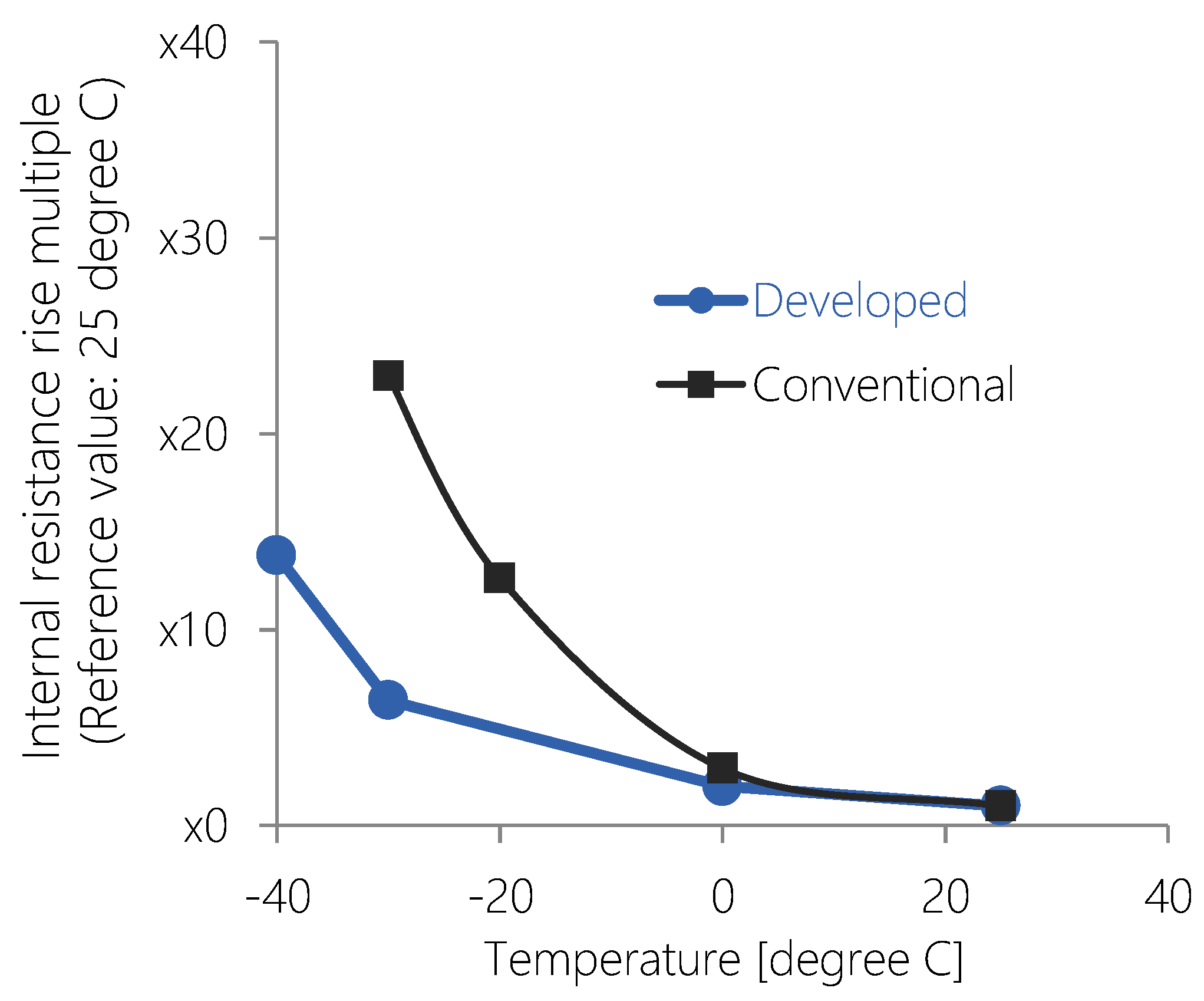
8.4. Low-Temperature Properties Evaluation
9. Results
9.1. Heat Resistance Evaluation
9.2. Evaluation of Large Current Charge–Discharge Properties
9.3. Low-Temperature Properties Evaluation
10. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Japan Prime Minister’s Office; Advanced Information and Telecommunications Network Society Promotion Strategy Headquarters (IT Comprehensive Strategy, Headquarters). Public-Private ITS Concept Road Map. 2018. Available online: http://www.kantei.go.jp/jp/singi/it2/kettei/pdf/20180615/siryou9.pdf (accessed on 10 May 2019).
- SAE. Automated Driving Levels of Driving Automation are Defined in New SAE International Standard J3016. Available online: http://www.sae.org/misc/pdfs/automated_driving.pdf (accessed on 10 May 2019).
- ISO 26262. Road Vehicles Functional Safety; ISO: Geneva, Switzerland, 2011. [Google Scholar]
- IEC 61508-6. Functional Safety of Electrical/Electronic Programmable Electronic Safety-Related Systems, Annex B; IEC: Geneva, Switzerland, 2010. [Google Scholar]
- Kaneko, T.; Nakamura, H.; Fukasawa, R. Safety design for Automated Driving Systems. JARI Res. J. 2016, 2016, 20161003. [Google Scholar]
- Murata, M. Jtekt’s Perspective On Steering Systems for Autonomous Driving. Automotive Mirai Summit Spring, Tokyo, Japan, 11 April 2019. [Google Scholar]
- Ohashi, M. 2-Drive motor control unit for electric power steering. Denso Tech. Rev. 2016, 21, 48–53. [Google Scholar]
- Fuji Keizai Management Co., Ltd. Business Technology Office. Latest Trend of 48V Conversion for Vehicle Power Supply; Fuji Marketing Report; Fuji Keizai Management Co., Ltd. Business Technology Office: Tokyo, Japan, 2014; Volume 76. [Google Scholar]
- Miyazaki, H. Future views on EPS system technological development. JTEKT Eng. J. 2012, 1009, 19–22. [Google Scholar]
- Shinoda, S.; Higashi, M.; Sugiyama, T. Development of Auxiliary Power Supply System for Electric Power Supply Steering. In Proceedings of the JSAE Annual Congress (Spring) Proceedings, Yokohama, Japan, 21–23 May 2014; p. 20145065. [Google Scholar]
- Sato, F.; Higashi, M.; Sugiyama, T. Development of Auxiliary Power Supply System for Electric Power Supply Steering. In Proceedings of the JSAE Annual Congress (Spring) Proceedings, Yokohama, Japan, 20–22 May 2015; p. 20155307. [Google Scholar]
- Hibino, T.; Sato, F.; Shinoda, S.; Sugiyama, T. Auxiliary Power Supply System for Electric Power Supply Steering. In Proceedings of the JSAE Annual Congress (Spring) Proceedings, Yokohama, Japan, 23–25 May 2018; p. 20180195. [Google Scholar]
- Kaji, R. ISO 26262 Compliant and Redundant Design of Electric Power Steering (EPS), MONOist Automotive Forum; ISO: Geneva, Switzerland, 2015. [Google Scholar]
- Tanizaki, H.; Matsui, K.; Tasaki, S.; Ando, N.; Hato, Y.; Shibutani, H. Development of Lithium-ion Capacitor (3). In The 47th Battery Symposium in Japan Proceedings; ESJ: Tokyo, Japan, 2006; p. 3E04. [Google Scholar]
- Tasaki, S.; Tanisaki, H.; Miyakawa, R.; Shirakami, A.; Taguchi, H.; Matsui, K.; Ando, N.; Hatozaki, O.; Hato, Y.; Shibuya, H. Development of Lithium-ion Capacitor (4). In The 47th Battery Symposium in Japan Proceedings; ESJ: Edogawa-ku, Tokyo, Japan, 2006; p. 3E05. [Google Scholar]
- Miyakawa, R.; Hato, Y.; Inagawa, M.; Inoue, K.; Seki, D. Development of High-Power Lithium-Ion Capacitor. NEC Tech. Rep. 2010, 63, 70–74. [Google Scholar]
- Aurbach, D.; Zaban, A.; Ein-Eli, Y.; Weissman, I.; Chusid, O.; Markovsky, B.; Levi, M.; Levi, E.; Schechter, A.; Granot, E. Recent studies on the correlation between surface chemistry, morphology, three-dimensional structures and performance of Li and Li-C intercalation anodes in several important electrolyte systems. J. Power Sources 1997, 68, 91–98. [Google Scholar] [CrossRef]
- Takumi, M.; Komatsubara, Y.; Naoki, O.; Kimoto, Y.; Kentaro, I.; Nishi, K. Development of high heat-resistant Lithium-ion Capacitor. In Proceedings of the JSAE Annual Congress (Spring) Proceedings, Yokohama, Japan, 23–25 May 2018; p. 20180194. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Challenge | Implementation Items | |
|---|---|---|
| Heat-resistance Improvement | Prevention of electrolyte solution decomposition | Adoption of high-heat resistance electrolyte salt |
| Prevention of electrolyte solution boiling | Adoption of high boiling-point organic solvent | |
| JTEKT proprietary method | ||
| Improvement of low temperature output | Prevention of electrolyte solution freezing | Adoption of low freezing point organic solvent |
| Optimization of organic solvent mixing ratio | ||
| Prevention of internal resistance increase | Affecter identification | |
| Changing of positive and negative materials | ||
| Upper Limit Voltage of Capacitor, V | ||||||
|---|---|---|---|---|---|---|
| 3.60 | 3.65 | 3.70 | 3.75 | 3.80 | ||
| Test atmospheric temperature, degree C | 110 | 24.6% | - | - | - | - |
| 105 | 7.1% | 5.7% | - | - | - | |
| 100 | 3.1% | 1.8% | 6.8% | - | - | |
| 95 | 0.3% | 2.2% | 3.7% | 5.1% | - | |
| 90 | 0.7% | −0.2% | 3.0% | 2.1% | - | |
| 85 | 0% | 2.1% | 3.5% | 3.5% | 7.7% | |
| Upper Limit Voltage of Capacitor, V | ||||||
|---|---|---|---|---|---|---|
| 3.60 | 3.65 | 3.70 | 3.75 | 3.80 | ||
| Test atmospheric temperature, degree C | 110 | 3% | - | - | - | - |
| 105 | 2.3% | −0.3% | - | - | - | |
| 100 | 1.6% | −0.2% | 0.7% | - | - | |
| 95 | 0.8% | 0.5% | 0.2% | 0% | - | |
| 90 | 2.0% | 0.9% | 1.4% | 0.6% | - | |
| 85 | 0% | 0.8% | 0.5% | 1.4% | 0.2% | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mio, T.; Komatsubara, Y.; Ohmi, N.; Kimoto, Y.; Iizuka, K.; Suganuma, T.; Maruyama, S.; Sugiyama, T.; Sato, F.; Shinoda, S.; et al. Auxiliary Power Supply System for Electric Power Steering (EPS) and High-Heat-Resistant Lithium-Ion Capacitor. World Electr. Veh. J. 2019, 10, 27. https://doi.org/10.3390/wevj10020027
Mio T, Komatsubara Y, Ohmi N, Kimoto Y, Iizuka K, Suganuma T, Maruyama S, Sugiyama T, Sato F, Shinoda S, et al. Auxiliary Power Supply System for Electric Power Steering (EPS) and High-Heat-Resistant Lithium-Ion Capacitor. World Electric Vehicle Journal. 2019; 10(2):27. https://doi.org/10.3390/wevj10020027
Chicago/Turabian StyleMio, Takumi, Yukihiro Komatsubara, Naoki Ohmi, Yusuke Kimoto, Kentaro Iizuka, Tomoki Suganuma, Shun Maruyama, Toyoki Sugiyama, Fumihiko Sato, Satoshi Shinoda, and et al. 2019. "Auxiliary Power Supply System for Electric Power Steering (EPS) and High-Heat-Resistant Lithium-Ion Capacitor" World Electric Vehicle Journal 10, no. 2: 27. https://doi.org/10.3390/wevj10020027
APA StyleMio, T., Komatsubara, Y., Ohmi, N., Kimoto, Y., Iizuka, K., Suganuma, T., Maruyama, S., Sugiyama, T., Sato, F., Shinoda, S., Hibino, T., & Nishi, K. (2019). Auxiliary Power Supply System for Electric Power Steering (EPS) and High-Heat-Resistant Lithium-Ion Capacitor. World Electric Vehicle Journal, 10(2), 27. https://doi.org/10.3390/wevj10020027