Abstract
While driving, stress and frustration can affect safe driving and pose the risk of causing traffic accidents. Therefore, it is important to control the driver’s anxiety level in order to improve the driving experience. In this paper, we propose and implement an intelligent system based on fuzzy logic (FL) for deciding the driver’s anxiety level (DAL). In order to investigate the effects of the considered parameters and compare the evaluation results, we implement two models: DAL Model 1 (DALM1) and DAL Model 2 (DALM2). The input parameters of DALM1 include driving experience (DE), in-car environment conditions (IECs), and driver age (DA), while for DALM2, we add a new parameter called the accident anxiety state (AAS). For both models, the output parameter is DAL. We carried out many simulations and compared the results of DALM1 and DALM2. The evaluation results show that the DAL is very good for drivers’ ages between 30 to 50 years old. However, when the driver’s age is below 30 or above 50, DAL tends to decline. With an increase in DE and IECs, the DAL value is decreased. But when the AAS is increased, the DAL is increased. DALM2 is more complex because the rule base is larger than DALM1, but it makes a better decision of DAL value.
1. Introduction
As the number of COVID-19 infections declines, economic activities are resuming, and the traffic volume will be increased in the future. Thus, drivers may face heightened stress due to traffic congestion, which could lead to irritation. Such emotions can impair the ability to drive safely and increase the risk of causing traffic accidents. Driving a car is a constant source of stress, as it demands that drivers remain vigilant of surrounding traffic conditions in order to make appropriate decisions and precise maneuvers. A survey on Japanese drivers’ behaviors indicates that the primary emotions experienced while driving include anger/irritation, fear of accidents, and impatience, as shown in Figure 1 [1].
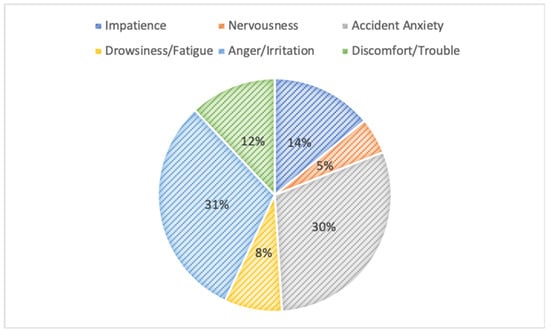
Figure 1.
Classification of experienced emotions.
There are many factors that cause these emotions such as the behavior of other drivers with aggressive cutting in, dangerous actions of cyclists and pedestrians, and the surrounding traffic environment, such as traffic jams. Also, when other vehicles do not adhere to traffic rules or are driven aggressively, it often irritates many drivers. Controlling emotions is crucial for safe driving. Regardless of driving proficiency, the inability to manage emotions, especially under significant stress, can impair concentration. This often results in hazardous driving behaviors, potentially leading to severe accidents [2].
Substantial research is currently being conducted by industry, governmental bodies, and academic entities to develop effective systems and infrastructure for preventing car accidents. This has led to an increased emphasis on collaboration among researchers, culminating in the creation of intelligent transportation systems (ITSs).
ITSs are dedicated to the application of advanced transportation technologies, merging state-of-the-art information, communication, and control technologies to craft sustainable networks that integrate people, vehicles, and roadways. Within ITSs, vehicular ad hoc networks (VANETs) provide critical roles, primarily focusing on enhancing safety, streamlining traffic flow, boosting efficiency, and facilitating the convenience of both drivers and passengers. In VANETs, vehicles, functioning as network nodes, are equipped with capabilities to relay vital data, including safety alerts and road or traffic updates, among themselves through vehicle-to-vehicle interactions and to roadside units via vehicle-to-infrastructure communication. Despite the practical deployment of VANETs incorporating various applications, existing architectures encounter a myriad of challenges.
Driving anxiety is related to many factors such as transportation, clinical, cognitive psychological, social, and technical aspects. However, most of the studies about driving anxiety are based on questionnaires, and they investigate only the feelings and emotions associated with this problem, while the quantification of its detrimental effects while driving is rarely undertaken. Most of the behavioral measures are determined by accident reports and assessments of subjective experiences. They are mainly related to the extent of driving avoidance in different situations [3,4,5,6,7,8].
Fuzzy logic (FL) significance arises from the general nature of human reasoning, which is typically approximate, particularly in the realm of common sense. FL employs linguistic variables to articulate control parameters, allowing complex issues to be expressed and understood through straightforward linguistic terms. Additionally, the use of linguistic variables enables the description of vague parameters. Fuzzy sets, representing linguistic labels, deploy membership functions to rank preferences for the potential interpretations of these labels. There are many applications of FL in different fields of science and engineering [9,10].
This paper presents an intelligent FL-based system for deciding the driver’s anxiety level (DAL). In order to investigate the effects of the considered parameters and compare the evaluation results, we implemented two models: DAL Model 1 (DALM1) and DAL Model 2 (DALM2). The input parameters of DALM1 were the driving experience (DE), in-car environment conditions (IECs), and the driver’s age (DA), while for DALM2, we added a new parameter called the accident anxiety state (AAS). For both models, the output parameter was DAL. We carried out many simulations and compared the results of DALM1 and DALM2. The evaluation results show that DALM2 is more complex because the rule base is larger than DALM1, but it makes a better decision of DAL value.
By our study, we aimed to close the gap between psychological and emotional fields and the technical approaches. To the best of our knowledge, there are no technical papers that consider FL to determine the driver’s anxiety level. Presently, in different fields, researchers have used artificial intelligence (AI) and machine learning (ML) algorithms [11,12]. However, they are used as black boxes. By using FL, we can build explainable intelligent systems.
The organization of this paper is outlined as follows: Section 2 introduces the concept of VANETs. A brief overview of FL and a FL controller (FLC) is provided in Section 3. The design of our FL-based system is presented in Section 4. In Section 5, we present the simulation results, while in Section 6, we expand on them through discussion. The paper concludes with a summary and suggestions for prospective research in Section 7.
2. VANETs
A VANET (vehicular ad hoc network) is a type of mobile ad hoc network (MANET), which can facilitate the exchange of information between vehicles as well as between vehicles and roadside infrastructure. These networks can support V2V (vehicle-to-vehicle) and V2I (vehicle-to-infrastructure) communication. They are expected to evolve with advancements in autonomous vehicles, smart cities and 5G technology. More sophisticated applications such as platooning, where vehicles travel in a group formation to reduce fuel consumption and improve traffic flow, will be integrated into VANETs. Thus, VANETs represent a crucial advancement in transportation technology, promising significant improvements in safety, efficiency, and convenience for future road networks.
Key components of VANETs are as follows.
- Vehicles: The vehicles are equipped with Onboard Units (OBUs) that facilitate communication with other vehicles and roadside units.
- Roadside units (RSUs): The RSUs are fixed units along the road, which provide connectivity to vehicles, serving as gateways to the internet and other networks.
- OBUs: The OBUs are communication devices installed in vehicles, which enable the transmission and reception of data.
- Application Units (AUs): The AUs are part of vehicle’s onboard system, which utilize VANET data to operate various applications.
In VANETs, the V2V communication is the direct communication between vehicles, which is essential for collision avoidance, traffic information dissemination, and cooperative driving. While V2I refers to the communication between vehicles and infrastructure, such as traffic signals or toll booths. This facilitates traffic management, toll collection, and the provision of real-time traffic updates. While VANETs possess many advantages, they have extensive and constantly changing topologies as well as fluctuations in the capacity of wireless links. They are constrained by bandwidth and hard delay constraints. Also, the high mobility, speed, and low density of vehicles lead to brief contact durations. In addition, limited transmission ranges, physical barriers, and interference result in intermittent and disrupted connectivity.
For the implementation of VANET applications, it is essential to develop appropriate networking mechanisms capable of addressing challenges inherent in vehicular environments [13,14,15,16,17,18,19].
Mobility pattern recognition is a complex task in VANETs because the driving state of each vehicle is different. For traffic control and accident prevention, the human driver behavior should be analyzed to identify mobility patterns and predict the driver’s state [20]. The diver’s state is affected by different factors such as the external environment, the car safety device, their driving skill, driver emotions, driver age, transportation information, and so on, as shown in Figure 2.
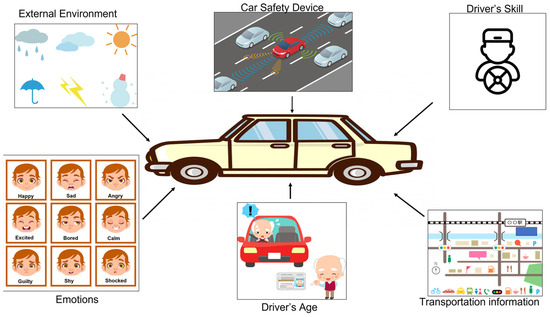
Figure 2.
Factors affecting driver’s state.
3. FC and FLC
The FL system considers values between true and false, rather than being confined to binary extremes, thus enhancing traditional logic frameworks. It can process both linguistic and numerical data by mapping from input vectors to a singular output value via an online algorithm. Unlike conventional binary logic, which operates strictly at 0 or 1, FL functions across a continuum from 0 to 1. This allows for more nuanced interpretations of data, aligning well with the mimicking complex, nonlinear relationships and managing situations with varying degrees of certainty. Consequently, FL offers a closer approximation to human reasoning and decision-making processes. Also, it proves beneficial in a variety of applications.
Fuzzy control (FC) emerges as the predominant field of application. The FLC process is initiated with fuzzification, in which crisp numerical input values are transformed into fuzzy sets based on predefined linguistic variables. This transformation enables the system to manage imprecision and ambiguity effectively. Such a step is crucial for translating real-world sensor data into formats that the FLC can interpret in terms of degrees of truth, rather than binary on/off states. The inference engine assesses the fuzzy inputs along with the rule base, which consists of a collection of if–then rules encoding expert knowledge and decision logic. These rules determine the output of the controller in fuzzy terms, taking into account all possible input combinations and their respective actions.
Finally, the defuzzification mechanism transforms the set of fuzzy outputs into a crisp value, which is subsequently utilized for control purposes. This output is a single value representing the aggregated result of the fuzzy inference process, optimized to achieve the desired control objective. Consequently, the FLC can make decisions that mimic human reasoning, facilitating sophisticated control strategies in complex and nonlinear systems [21,22,23,24].
4. Proposed Simulation System
In this paper, we consider FL to implement the proposed simulation system. The proposed system structure is shown in Figure 3. In the implemented system, sensors will detect and quantify the input parameters for the FL-based system.
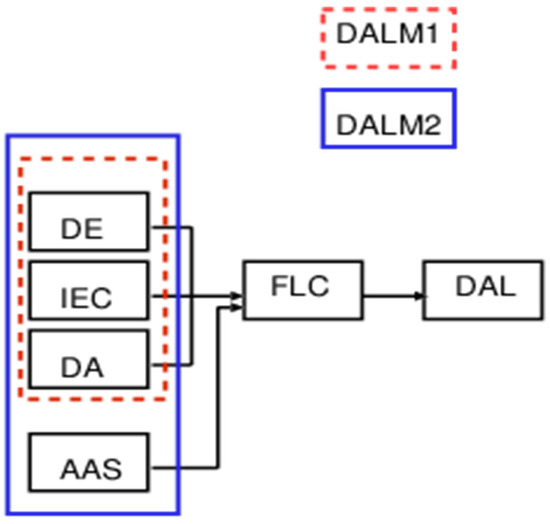
Figure 3.
Structure of the proposed system.
We implement two models: DALM1 and DALM2. The input parameters of DALM1 include driving experience (DE), in-car environment conditions (IECs), and driver age (DA), while for DALM2, we add a new parameter called the accident anxiety state (AAS). For both models, the output parameter is the DAL. We explain each parameter in the following paragraphs.
- Driving Experience (DE)
In general, it is known that experienced drivers are able to make more appropriate responses than inexperienced drivers. Also, the driving experience can affect the traffic safety behavior. Specifically, young people have peculiar driving behavior such as driving faster, decelerating and accelerating more abruptly, being less likely to come to a full stop at stop signs and tailgating other cars, in comparison to middle-aged and older drivers [25].
- In-car Environment Conditions (IECs)
The IECs are related to the vehicle conditions such as the air quality aspects influencing environmental conditions in vehicles. Especially with the mobile age and associated lengthy periods of stay in enclosed cars, maintaining healthy air hygiene in the car interior is very important. There are different factors that influence the vehicle environment such as temperature, window-opening, the correct usage of automated air conditioning systems, and indoor air filters. These factors are useful for improving the environmental conditions of vehicles and optimizing the interior air hygiene. These are related also with the different endowments, ages and models of vehicles [26].
- Driver Age (DA)
Aging combined with injury or disease can affect the physical and mental capabilities required for the task of driving. There are different difficulties for older people such as maintaining a constant speed and keeping within the lane, turning the head and body during parking, the reduced field of view and unintentional speeding, identifying road signs and driving at night, reduced reactions and longer decision times, and difficulty with ingress/egress. Thus, the age of drivers has a great effect on DAL [27].
- Accident Anxiety State (AAS)
The AAS refers to a specific type of anxiety experienced by individuals who have been involved in, witnessed, or even heard about car accidents. This anxiety can significantly affect the person ability to drive or even be a passenger in a vehicle. The symptoms and impacts of the driver AAS include physical symptoms, emotional symptoms, behavioral symptoms, cognitive symptoms, and so on. The AAS can severely limit the person independence and freedom, making it challenging to carry out daily activities that involve driving. It can also affect one’s ability to commute to work, attend social events, or perform assigned errands [28].
The terms set for input and output parameters are defined as shown in Table 1. For the implementation of the proposed system, we consider triangular and trapezoidal membership functions as shown in Figure 4 because they are good for real-time systems and applications [29]. The membership functions are shown in Figure 5. We set the DE, IEC, AAS and DAL values to range from 0 to 1 unit. The DE value range we set from 20 to 90 considering the driver ages in Japan [25]. The DAL is considered in 6 levels for DALM1 and 7 levels for DALM2. When the DAL value is DAL1, the amount of the driver’s anxiety is good, while when it is DAL6 (DALM1) or DAL7 (DALM2), this is the worst case.

Table 1.
Parameters and term set.
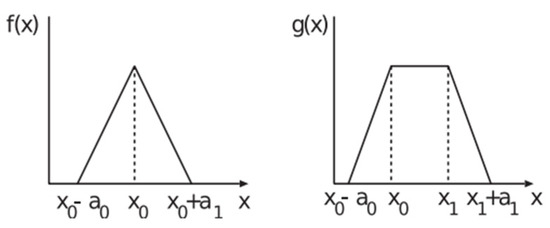
Figure 4.
Triangular and trapezoidal membership functions.
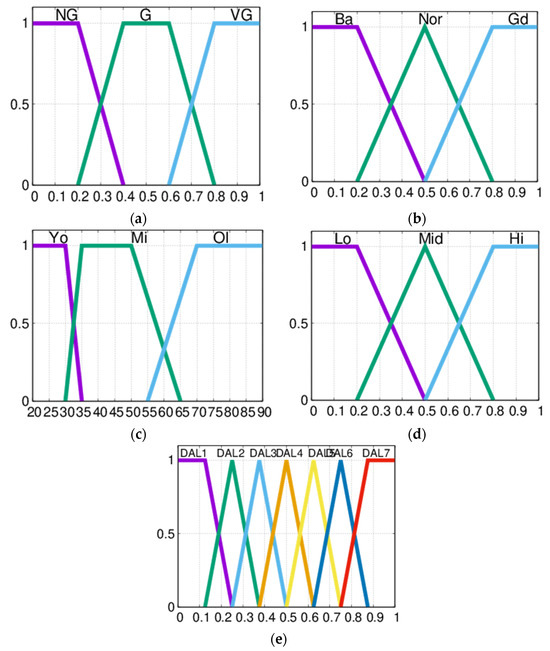
Figure 5.
Membership functions for parameters. (a) Driving Experience (DE). (b) In-car Environment Conditions (IECs). (c) Driver Age (DA). (d) Accident Anxiety State (AAS). (e) Driver Anxiety Level (DAL).
The fuzzy rule base (FRB) for DALM1 is shown in Table 2 and has 27 rules, while the FRB for DALM2 is shown in Table 3 and has 81 rules. The control rules are constructed by “if … then …” expressions, such as the following:
Table 2.
FRB for DALM1.
Table 3.
FRB for DALM2.
If the DE is NG, the IECs are Ba and the DA is Yo, then the DAL is DAL6 (Rule 1 of Table 2), or If the AAS is Hi, the DE is VG, the IECs are Gd and the DA is Ol, then the DAL is DAL3 (Rule 81 of Table 3).
We explain the membership functions as follows. The triangular membership function is denoted by f(), while the trapezoidal membership function is denoted by g(). The maximum value for the triangular membership function is denoted by x0, while the edges are denoted by x0 – a0 and x0 + a1, for the left and right sides, respectively. For the trapezoidal membership function, the maximum values are denoted by x0 and x1, while the edges are denoted by x0 – a0 and x1 + a1, for the left and right sides, respectively. The FRB for both models is tuned based on our experience and the related work on a driver’s anxiety [25,26,27,28]. When we want a strong effect of the parameter for a peak value, we select the triangular membership function, while in cases when we want the strong effect of the parameter in a region, we use the trapezoidal membership function.
μNG (DE) = g (DE; NG0, NG1, NGw0, NGw1)
μG (DE) = g (DE; G0, G1, Gw0, Gw1)
μVG (DE) = g (DE; VG0, VG1, VGw0, VGw1)
μBa (IEC) = g (IEC; Ba0, Ba1, Baw0, Baw1)
μNor (IEC) = f (IEC; Nor0, Norw0, Norw1)
μGd (IEC) = g (IEC; Gd0, Gd1, Gdw0, Gdw1)
μYo (DA) = g (DA; Yo0, Yo1, Yow0, Yow1)
μMi (DA) = g (DA; Mi0, Mi1, Miw0, Miw1)
μOl (DA) = g (DA; Ol0, Ol1, Olw0, Olw1)
μLo (AAS) = g (AAS; Lo0, Lo1, Low0, Low1)
μMid (AAS) = f (AAS; Mid0, Midw0, Midw1)
μHi (AAS) = g (AAS; Hi0, Hi1, Hiw0, Hiw1)
The membership functions of DAL are defined as follows.
μDAL1 (DAL) = g (DAL; DAL10, DAL11, DAL1w0, DAL1w1)
μDAL2 (DAL) = f (DAL; DAL20, DAL2w0, DAL2w1)
μDAL3 (DAL) = f (DAL; DAL30, DAL3w0, DAL3w1)
μDAL4 (DAL) = f (DAL; DAL40, DAL4w0, DAL4w1)
μDAL5 (DAL) = f (DAL; DAL50, DAL5w0, DAL5w1)
μDAL6 (DAL) = f (DAL; DAL60, DAL6w0, DAL6w1)
μDAL7 (DAL) = g (DAL; DAL70, DAL71, DAL7w0, DAL7w1)
5. Simulation Results
In this section are presented the simulation results, illustrating the correlations between input and output parameters as shown in Figure 6, Figure 7, Figure 8 and Figure 9. We discuss the relations among various parameters in DALM1 and DALM2. For implementation of our system, we use FuzzyC software developed in our Lab [2,29].
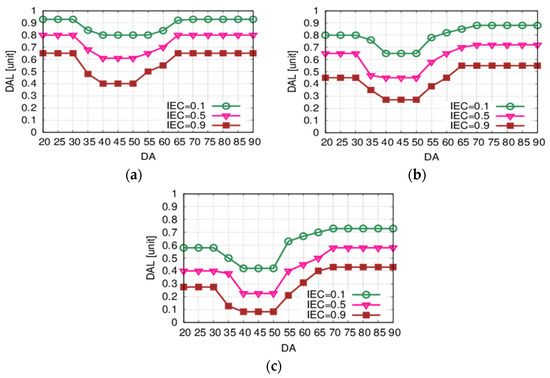
Figure 6.
Relationship between DAL and DA for different values of IECs and DE. (a) DE = 0.1. (b) DE = 0.5. (c) DE = 0.9.
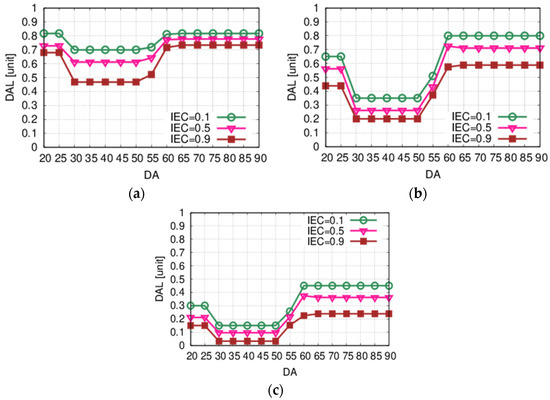
Figure 7.
Relationship between DAL and DA for different values of IECs and DE when AAS is 0.1. (a) AAS = 0.1, DE = 0.1. (b) AAS = 0.1, DE = 0.5. (c) AAS = 0.1, DE = 0.9.
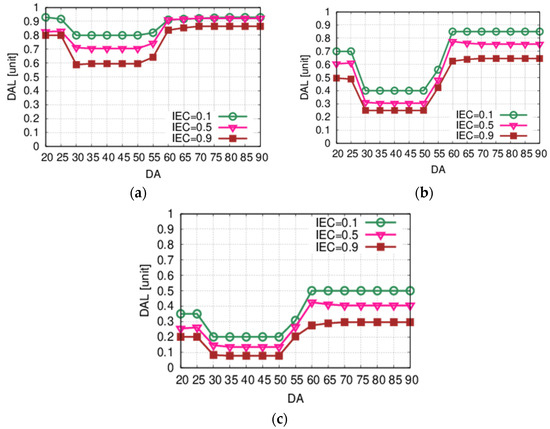
Figure 8.
Relationship between DAL and DA for different values of IECs and DE when AAS is 0.5. (a) AAS = 0.5, DE = 0.1. (b) AAS = 0.5, DE = 0.5. (c) AAS = 0.5, DE = 0.9.
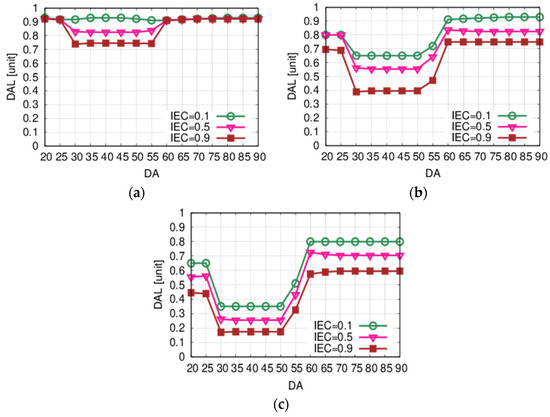
Figure 9.
Relationship between DAL and DA for different values of IECs and DE when AAS is 0.9. (a) AAS = 0.9, DE = 0.1. (b) AAS = 0.9, DE = 0.5. (c) AAS = 0.9, DE = 0.9.
5.1. Simulation Results of DALM1
The simulation results of DALM1 are shown in Figure 6. We show the relationship between DAL and DA, DE and IECs input parameters. The DE is considered a constant parameter. We increased the values of the DE and IECs from 0.1 to 0.9 and the DA from 20 to 90.
In Figure 6a, when IEC is 0.1 and DA is 40, the DAL is 0.8. When the IEC value is increased to 0.5 and 0.9, the DAL is 0.62 and 0.4. So, the DAL value is decreased about 18% and 40%, respectively. In Figure 6b,c, we changed the DE to 0.5 and 0.9, respectively. We see that with increase of DE parameter, the DAL is decreased. For DE 0.5 and 0.9, comparing with Figure 6a, when the DA is 40 and the IEC is 0.9, the DAL is decreased by 12% and 28%, respectively.
5.2. Simulation Results of DALM2
The simulation results of DALM2 are shown in Figure 7, Figure 8 and Figure 9. We show the relationship between DAL and DA for different values of IECs, AAS and DE. We investigate the effect of AAS on DAL, which is considered as a new parameter. We consider the AAS and DE as constant parameters and we change the IECs value from 0.1 to 0.9, and the DA value from 20 to 90.
We can see in Figure 7a that when the DA value is 40, IEC is 0.1, AAS is 0.1 and DE is 0.1, the DAL is 0.7. Comparing the same point with Figure 6, the DAL is decreased 10%. In Figure 7b, we changed the DE from 0.1 to 0.5. It can be seen that the DAL is decreased compared with Figure 7a. Also, in Figure 7c, the values of DAL have decreased much more.
In Figure 8 and Figure 9, we changed the AAS values from 0.1 to 0.5 and 0.9. We see that for the same point when the DA value is 40, IECs is 0.1 and DE is 0.1, the DAL is 0.8 and 0.92, respectively. Comparing with the same point of Figure 7a, the DAL is increased by 10% and 22%, respectively.
Thus, when the AAS value is increased, the DAL in DALM2 increases much more compared with DALM1. This shows that the AAS has a great effect on the driver’s anxiety level.
6. Discussion
In this section, we discuss the simulation results. In the case of DALM1, when dealing with inexperienced drivers (DE = 0.1), the results show the highest values of DAL. The low experience coupled with bad in-car environment conditions increase the driver’s anxiety. For a moderate value of driver experience (DE = 0.5), the anxiety level is decreased, and the best behavior is that for middle-aged drivers. In the case of experienced drivers (DE = 0.9), we see that the anxiety level is very low, especially for middle-aged drivers and good in-car environment conditions.
For DALM2, we have scenarios: a low-level accident anxiety state (AAS = 0.1: Scenario 1), a moderate-level accident anxiety state (AAS = 0.5: Scenario 2) and a high-level accident anxiety state (AAS = 0.9: Scenario 3).
In the case of Scenario 1, the drivers have a low level of accident anxiety, so the driver experience coupled with in-car environment conditions and driver age have a great effect on the driver’s anxiety level. The low level of DAL occurs when the driver is middle-aged, the in-car environment conditions are good and they have good experience. In the case of Scenario 2, the accident anxiety state is moderate, so the values of DAL are increased compared with Scenario 1. The values of DAL are increased more in Scenario 3 because the level of the accident anxiety state is high. The worst case of Scenario 3 occurs when the driving experience is low, in-car environment conditions are bad, with young and old-aged drivers.
7. Conclusions and Future Work
In this paper, we presented a FL-based system for assessing driver anxiety levels by considering various input parameters. We examined two models: DALM1 and DALM2. We evaluated the proposed models through simulations. From the evaluation results, we conclude that the DAL is very good for drivers within the ages of 30 to 50 years old. However, when the driver’s age is below 30 or above 50, the DAL tends to decline. With increasing values of DE and IECs, the DAL value is decreased. But when the AAS is increased, the DAL is increased. This shows that the AAS has a great effect on the driver’s anxiety level. Comparing complexity, DALM2 is more complex than DALM1. However, DALM2 also considers the AAS, which makes the system more reliable.
In future research, we would like to make extensive simulations to evaluate the proposed system. Also, we will implement a testbed and compare the simulation results with experimental results.
Author Contributions
Conceptualization, Y.L. and L.B.; methodology, Y.L.; software, L.B.; validation, Y.L; formal analysis, Y.L.; investigation, Y.L. and L.B.; resources, Y.L. and L.B.; data curation, Y.L.; writing—original draft preparation, Y.L.; writing—review and editing, L.B.; visualization, Y.L.; supervision, L.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Driver Emotional Characteristics and Their Impact on Driving Behavior: Aiming to Develop an Educational Program for Emotion Control, International Association of Traffic and Safety Sciences (IATSS), Research Study, in Japanese. 2008. Available online: https://www.iatss.or.jp/research/entry_img/h076.pdf (accessed on 10 June 2024).
- Bylykbashi, K.; Qafzezi, E.; Ampririt, P.; Ikeda, M.; Matsuo, K.; Barolli, L. Performance evaluation of an integrated fuzzy-based driving-support system for real-time risk management in VANETs. Sensors 2020, 20, 6537. [Google Scholar] [CrossRef]
- Stephens, A.; Collette, B.; Hidalgo-Munoz, A.; Fort, A.; Evennou, M.; Jallais, C. The impacts of anxiety over driving on self-reported driving avoidance, work performance and quality of life. J. Transp. Heal. 2020, 19, 100929. [Google Scholar] [CrossRef]
- Stephens, A.; Collette, B.; Hidalgo-Munoz, A.; Fort, A.; Evennou, M.; Jallais, C. Help-seeking for driving anxiety: Who seeks help and how beneficial is this perceived to be? Transp. Res. Part F Traffic Psychol. Behav. 2024, 105, 182–195. [Google Scholar] [CrossRef]
- Pawar, N.M.; Yadav, A.K.; Velaga, N.R. A comparative assessment of subjective experience in simulator and on-road driving under normal and time pressure driving conditions. Int. J. Inj. Control. Saf. Promot. 2022, 30, 116–131. [Google Scholar] [CrossRef]
- Brzezinska, D.; Bryant, P. Performance-based analysis in evaluation of safety in car parks under electric vehicle fire conditions. Energies 2022, 15, 649. [Google Scholar] [CrossRef]
- Ertan, D.; Hubert-Jacquot, C.; Maillard, L.; Sanchez, S.; Jansen, C.; Fracomme, L.; Schwan, R.; Hopes, L.; Javelot, H.; Tyvaert, L.; et al. Anticipatory anxiety of epileptic seizures: An overlooked dimension linked to trauma history. Seizure 2021, 85, 64–69. [Google Scholar] [CrossRef]
- Balzarotti, S.; Sullman, M.; Abati, D.; Biassoni, F. The expression of driving anger in a sample of Italian drivers. Transp. Res. Part F Traffic Psychol. Behav. 2023, 97, 383–395. [Google Scholar] [CrossRef]
- Zimmermann, H.J. Fuzzy Set Theory and Its Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1996. [Google Scholar] [CrossRef]
- Balaji, T.S.; Srinivasan, S.; Bharathi, S.P.; Ramesh, B. Fuzzy-Based Secure Clustering with Routing Technique for VANETs. Comput. Syst. Sci. Eng. 2022, 43, 291–304. [Google Scholar] [CrossRef]
- Tselentis, D.I.; Papadimitriou, E.; van Gelder, P. The usefulness of artificial intelligence for safety assessment of different transport modes. Accid. Anal. Prev. 2023, 186, 107034. [Google Scholar] [CrossRef]
- Chen, J.; Teo, T.H.; Kok, C.L.; Koh, Y.Y. A Novel Single-Word Speech Recognition on Embedded Systems Using a Convolution Neuron Network with Improved Out-of-Distribution Detection. Electronics 2024, 13, 530. [Google Scholar] [CrossRef]
- Qu, F.; Wu, Z.; Wang, F.-Y.; Cho, W. A security and privacy review of VANETs. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2985–2996. [Google Scholar] [CrossRef]
- Zeadally, S.; Hunt, R.; Chen, Y.-S.; Irwin, A.; Hassan, A. Vehicular ad hoc networks (VANETS): Status, results, and challenges. Telecommun. Syst. 2012, 50, 217–241. [Google Scholar] [CrossRef]
- Manvi, S.S.; Tangade, S. A survey on authentication schemes in VANETs for secured communication. Veh. Commun. 2017, 9, 19–30. [Google Scholar] [CrossRef]
- Lee, B.-G.; Chung, W.-Y. Wearable glove-type driver stress detection using a motion sensor. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1835–1844. [Google Scholar] [CrossRef]
- Aljabry, I.A.; Al-Suhail, G.A. A survey on network simulators for vehicular ad-hoc networks (VANETS). Int. J. Comput. Appl. 2021, 174, 1–9. [Google Scholar] [CrossRef]
- Babu, S.; Raj Kumar, P.A. A comprehensive survey on simulators, emulators, and testbeds for VANETs. Int. J. Commun. Syst. 2022, 35, e5123. [Google Scholar] [CrossRef]
- Malik, S.; Sahu, P.K. A comparative study on routing protocols for VANETs. Heliyon 2019, 5, e02340. [Google Scholar] [CrossRef]
- Swamynathan, C.; Ravi, V.; Ranganayakulu, D.; Kandasamy, R. Driver behaviour prediction and enhanced ad hoc on-demand distance vector routing protocol in VANET. Int. J. Commun. Syst. 2023, 37, e5650. [Google Scholar] [CrossRef]
- Mendel, J.M.; John, R.I.; Liu, F. Interval type-2 fuzzy logic systems made simple. IEEE Trans. Fuzzy Syst. 2006, 14, 808–821. [Google Scholar] [CrossRef]
- Ampririt, P.; Higashi, S.; Qafzezi, E.; Ikeda, M.; Matsuo, K.; Barolli, L. An intelligent fuzzy-based system for handover decision in 5G-IoT networks considering network slicing and SDN technologies. Internet Things 2023, 23, 100870. [Google Scholar] [CrossRef]
- Mittal, K.; Jain, A.; Vaisla, K.S.; Castillo, O.; Kacprzyk, J. A comprehensive review on type 2 fuzzy logic applications: Past, present and future. Eng. Appl. Artif. Intell. 2020, 95, 103916. [Google Scholar] [CrossRef]
- Ramesh, G.; Aravindarajan, V.; Logeshwaran, J.; Kiruthiga, T. Estimation analysis of paralysis effects for human nervous system by using Neuro fuzzy logic controller. NeuroQuantology 2022, 20, 3195–3206. [Google Scholar]
- Begum, S. Intelligent driver monitoring systems based on physiological sensor signals: A review. In Proceedings of the 2013 16th International IEEE Conference on Intelligent Transportation Systems—(ITSC 2013), Hague, The Netherlands, 6–9 October 2013; pp. 282–289. [Google Scholar] [CrossRef]
- Buera, L.; Lleida, E.; Miguel, A.; Ortega, A. Multi-environment models based linear normalization for speech recognition in car conditions. In Proceedings of the 2004 IEEE International Conference on Acoustics, Speech, and Signal Processing, Montreal, QC, Canada, 17–21 May 2004. [Google Scholar] [CrossRef]
- Shea, A.; Evans, L. Traffic Safety and the Driver. J. Oper. Res. Soc. 1992, 43, 728. [Google Scholar] [CrossRef]
- Măirean, C. Fear and avoidance of driving among drivers involved in a road traffic crash. The role of traumatic fear and driving cognitions. Transp. Res. Part F Traffic Psychol. Behav. 2020, 74, 322–329. [Google Scholar] [CrossRef]
- Bylykbashi, K.; Elmazi, D.; Matsuo, K.; Ikeda, M.; Barolli, L. Effect of security and trustworthiness for a fuzzy cluster management system in VANETs. Cogn. Syst. Res. 2019, 55, 153–163. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).