
The Car-Following Model and Its Applications in the V2X Environment: A Historical Review




Abstract
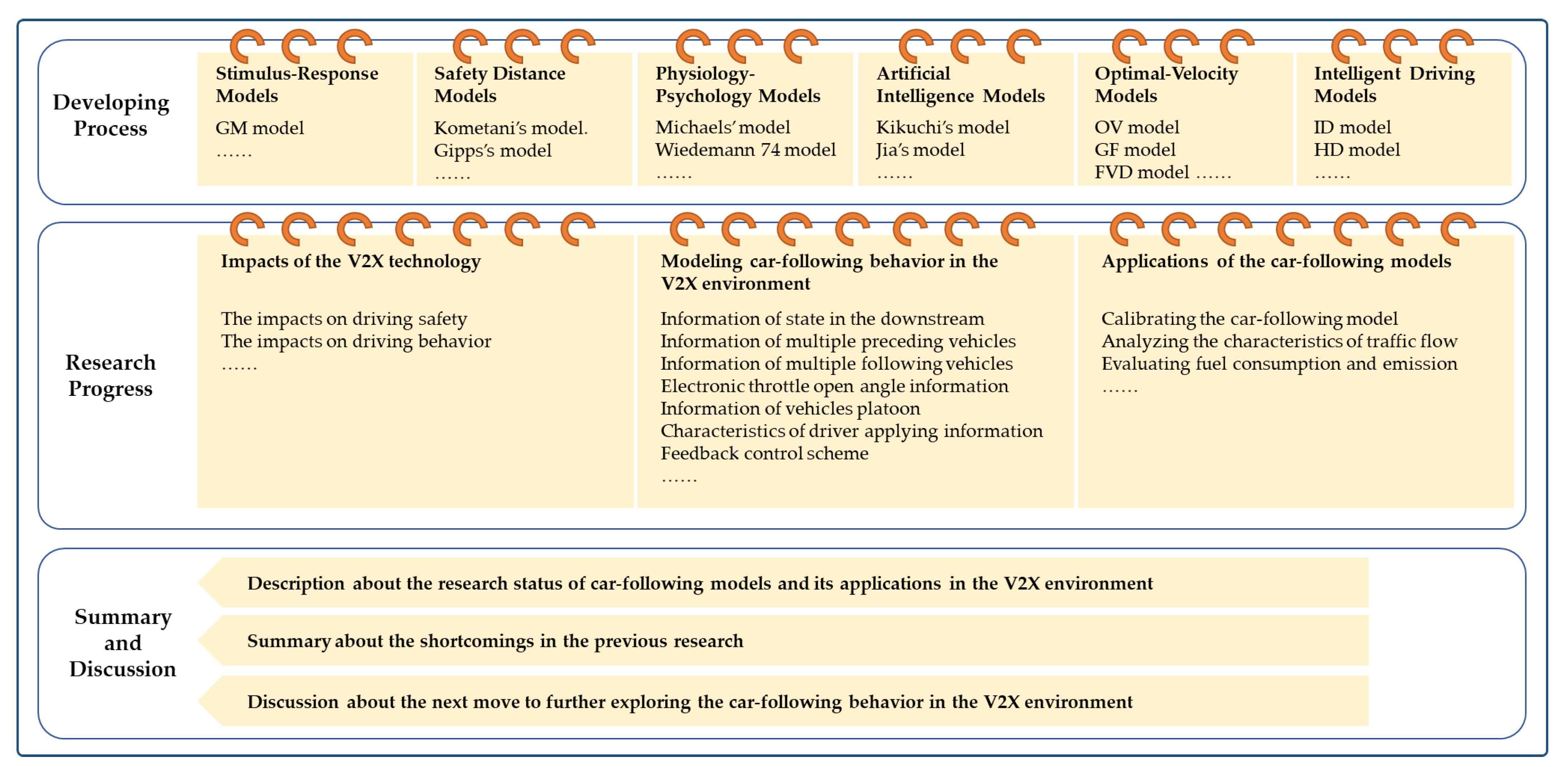
1. Introduction
- An introduction of the development process of traditional car-following models;
- A description of the current status of research on the car-following model and its applications in the V2X environment;
- A discussion of the achievements and shortcomings of the previous studies along with future research trends.
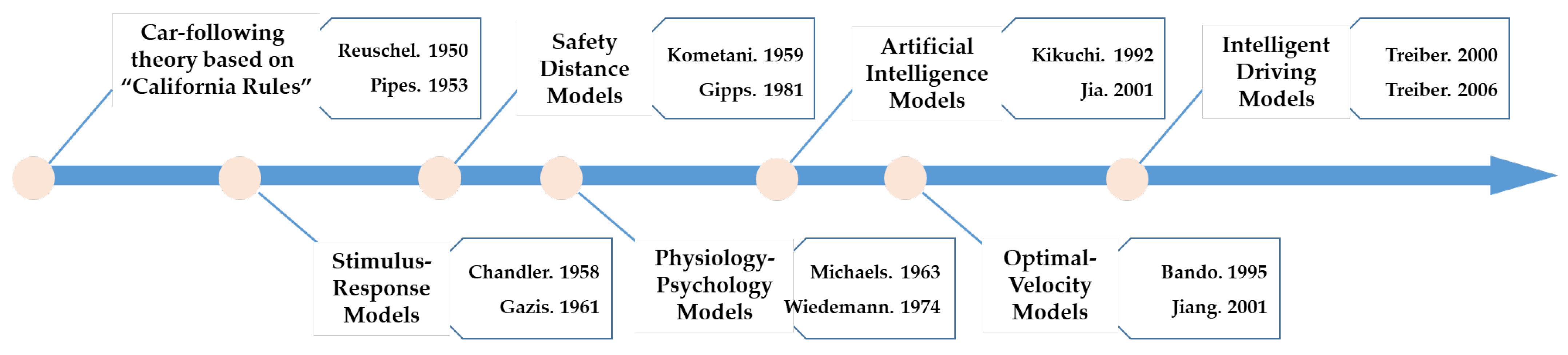
2. Development Process of the Traditional Car-Following Models
3. Research on Car-Following Behavior in the V2X Environment
3.1. Impacts of V2X Technology
3.2. Modelling the Car-Following Behavior
3.2.1. Information of State in the Downstream
- The vehicles can decelerate to lower speed within a shorter time and take larger headway, which will enhance driving safety;
- The accelerating and decelerating processes, and especially the braking-to-stop process, are optimized;
- The traffic efficiency of the road or interaction is improved, which means that the number of vehicles passing by the road or interacting within per time unit increase.
3.2.2. Information of Multiple Preceding Vehicles
3.2.3. Information of Multiple Following Vehicles
3.2.4. Electronic Throttle Open Angle Information
3.2.5. Information of Vehicles Platoon
3.2.6. Characteristics of Driver Applying Information
3.2.7. Feedback Control Scheme
3.3. Applications of the Car-Following Models
3.3.1. Calibrating the Car-Following Model
3.3.2. Analyzing the Characteristics of Traffic Flow
3.3.3. Evaluating Energy Consumption and Emission
4. Discussion
- The micro-level. The car-following process of vehicle(s) has been significantly optimized. In other words, the motion state of the vehicle(s) in all three stages (i.e., the normal car-following stage, the start-accelerating stage, and the braking-stop stage) has been improved. Specifically, the motion state of the vehicle(s) in the normal car-following stage is steadier and approximates the optimal state within less deviation. In the other two stages, the starting/braking process needs less time, and the safety, as well as the comfort of these processes, have been improved. Meanwhile, the headway and velocity of vehicle(s) during the car-following process are different from the past environment without V2X technology.
- The macro-level. Generally, the traffic flow can operate in a better state. Specifically, for the disturbance with the same scale, it can be absorbed by the traffic flow in the V2X environment in less time, and the deviation between the current state and the optimized state of traffic flow in the environment when resisting the disturbance is smaller than that in the traditional environment. For the disturbance with different scales, the traffic flow in the V2X environment can maintain a steady-state when encountering larger disturbance. When operating at the steady-state, the efficiency of the traffic flow of the road segment or intersection in the V2X environment is much higher than that in the previous environment, which is the expression of the aforementioned optimization at the micro-level. When the traffic flow is operating out of the steady-state, the deviation can be kept in a smaller range. It is more difficult for the traffic flow to reach the completely blocked state, and the traffic flow will show the different propagating and evolving characteristics of the density wave.
- As the core of optimal velocity models, the unique performance of the optimal velocity function contributes much. As a kind of velocity–headway function, the optimal velocity function is monotonically increasing, with an upper bound and inflection point. Those models established based on the optimal velocity function can describe the actual characteristics of human drivers, which are that they will pursue their desired car-following state. They will use a higher speed when conditions permit in the pursuing process, but they cannot unlimitedly accelerate with the constraints of vehicle and road conditions.
- The optimal velocity models, especially the FVD model, can avoid collisions in simulations such as the safety distance models, and they can also reproduce several nonlinear traffic phenomena such as the stop-and-go, which the safety distance models can hardly achieve. Meanwhile, compared with other types of traditional car-following models, these optimal velocity function-based models are much easier to combine with the (reduced) perturbation method and other methods of linear stability analysis or nonlinear analysis, which is mainly contributed by the unique performance of the optimal velocity function, especially the inflection point, when they are employed in exploring the traffic flow. Based on this, the neutral stability conditions, which describe the ability of traffic flow to maintain a steady state, and the density wave, which describes the evolution characteristics of traffic flow when it operates away from the steady state, can be derived and analyzed.
- The structure of optimal velocity models is concise and easier to extend. This kind of unique structure enables the optimal velocity models to conveniently incorporate various kinds of information, such as position, velocity, acceleration, and ETOA in the V2X environment. Meanwhile, the incorporation will not impact the ability of these models, including fitting the characteristics of actual car-following behavior at the micro-level and reproducing nonlinear traffic phenomena, as well as analyzing the stability characteristics of traffic flow.
4.1. The Existing Shortcomings
4.2. Research Trends
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Chandler, R.E.; Herman, R.; Montroll, E.W. Traffic Dynamics: Studies in Car Following. Oper. Res. 1958, 6, 165–184. [Google Scholar] [CrossRef]
- Gazis, D.C.; Herman, R.; Rothery, R.W. Nonlinear Follow-the-Leader Models of Traffic Flow. Oper. Res. 1961, 9, 545–567. [Google Scholar] [CrossRef]
- Kometani, E.; Sasaki, T. Dynamic Behavior of Traffic with a Nonlinear Spacing-Speed Relationship; Elsevier: New York, NY, USA, 1959; pp. 105–119. [Google Scholar]
- Gipps, P. A behavioural car-following model for computer simulation. Transp. Res. Part B Methodol. 1981, 15, 105–111. [Google Scholar] [CrossRef]
- Wang, X.; Juan, Z.; Jia, H.; Meng, Z. Summarization of Car-Following Models Based on Security Distance. J. Chang. Univ. (Nat. Sci. Ed.) 2004, 24, 51–54. [Google Scholar] [CrossRef]
- Michaels, R.M. Perceptual Factors in Car Following. In Proceedings of the Second International Symposium on the Theory of Traffic Flow, London, UK, 25–27 June 1963; pp. 44–59. [Google Scholar]
- Wiedemann, R. Simulation of Road Traffic in Traffic Flow; University of Karlsruhe: Karlsruhe, Germany, 1974. [Google Scholar]
- Kikuchi, S.; Chakraborty, P. Car Following Model Based on a Fuzzy Inference System. Transp. Res. Rec. 1992, 1194, 82–91. [Google Scholar]
- Mar, J.; Lin, F.-J.; Lin, H.-T.; Hsu, L.-C. The car following collision prevention controller based on the fuzzy basis function network. Fuzzy Sets Syst. 2003, 139, 167–183. [Google Scholar] [CrossRef]
- Ma, X. A Neural-Fuzzy Framework for Modeling Car-following Behavior. In Proceedings of the 2006 IEEE International Conference on Systems, Man and Cybernetics, Taipei, Taiwan, 8–11 October 2006; pp. 1178–1183. [Google Scholar]
- Bando, M.; Hasebe, K.; Nakayama, A.; Shibata, A.; Sugiyama, Y. Dynamical Model of Traffic Congestion and Numerical Simulation. Phys. Rev. E 1995, 51, 1035–1042. [Google Scholar] [CrossRef]
- Helbing, D.; Tilch, B. Generalized force model of traffic dynamics. Phys. Rev. E 1998, 58, 133–138. [Google Scholar] [CrossRef]
- Jiang, R.; Wu, Q.; Zhu, Z. Full velocity difference model for a car-following theory. Phys. Rev. E 2001, 64, 017101. [Google Scholar] [CrossRef]
- Treiber, M.; Helbing, D. Memory effects in microscopic traffic models and wide scattering in flow-density data. Phys. Rev. E 2003, 68, 046119. [Google Scholar] [CrossRef]
- Treiber, M.; Kesting, A.; Helbing, D. Delays, inaccuracies and anticipation in microscopic traffic models. Phys. A Stat. Mech. Its Appl. 2006, 360, 71–88. [Google Scholar] [CrossRef]
- Spyropoulou, I.; Karlaftis, M.G. Incorporating intelligent speed adaptation systems into microscopic traffic models. IET Intell. Transp. Syst. 2008, 2, 331–339. [Google Scholar] [CrossRef]
- Farah, H.; Koutsopoulos, H.N. Do cooperative systems make drivers’ car-following behavior safer? Transp. Res. Part C Emerg. Technol. 2014, 41, 61–72. [Google Scholar] [CrossRef]
- Navarro, J.; Osiurak, F.; Ovigue, M.; Charrier, L.; Reynaud, E. Highly Automated Driving Impact on Drivers’ Gaze Behaviors during a Car-Following Task. Int. J. Hum.-Comput. Interact. 2019, 35, 1008–1017. [Google Scholar] [CrossRef]
- Calvi, A.; D’Amico, F.; Ferrante, C.; Ciampoli, L.B. A driving simulator study to assess driver performance during a car-following maneuver after switching from automated control to manual control. Transp. Res. Part F Traffic Psychol. Behav. 2020, 70, 58–67. [Google Scholar] [CrossRef]
- Tang, T.-Q.; Shi, W.-F.; Shang, H.-Y.; Wang, Y.-P. An extended car-following model with consideration of the reliability of inter-vehicle communication. Measurement 2014, 58, 286–293. [Google Scholar] [CrossRef]
- Newell, G.F. Nonlinear Effects in the Dynamics of Car Following. Oper. Res. 1961, 9, 209–229. [Google Scholar] [CrossRef]
- Hua, X.-D.; Wei, W.; Hao, W. A car-following model with the consideration of vehicle-to-vehicle communication technology. Acta Phys. Sin. 2016, 65, 010502. [Google Scholar] [CrossRef]
- Chang, X.; Li, H.; Rong, J.; Huang, Z.; Chen, X.; Zhang, Y. Effects of on-Board Unit on Driving Behavior in Connected Vehicle Traffic Flow. J. Adv. Transp. 2019, 2019, 1–12. [Google Scholar] [CrossRef]
- Ali, Y.; Sharma, A.; Haque, M.M.; Zheng, Z.; Saifuzzaman, M. The impact of the connected environment on driving behavior and safety: A driving simulator study. Accid. Anal. Prev. 2020, 144, 105643. [Google Scholar] [CrossRef]
- Tang, T.-Q.; Shi, W.; Shang, H.; Wang, Y. A new car-following model with consideration of inter-vehicle communication. Nonlinear Dyn. 2014, 76, 2017–2023. [Google Scholar] [CrossRef]
- Kurata, S.; Nagatani, T. Spatio-temporal dynamics of jams in two-lane traffic flow with a blockage. Phys. A Stat. Mech. Its Appl. 2003, 318, 537–550. [Google Scholar] [CrossRef]
- Tang, T.-Q.; Huang, H.-J.; Wong, S.C.; Jiang, R. Lane changing analysis for two-lane traffic flow. Acta Mech. Sin. 2007, 23, 49–54. [Google Scholar] [CrossRef]
- Ou, H.; Tang, T.-Q. An extended two-lane car-following model accounting for inter-vehicle communication. Phys. A Stat. Mech. Its Appl. 2018, 495, 260–268. [Google Scholar] [CrossRef]
- Yu, S.; Shi, Z. Analysis of car-following behaviors considering the green signal countdown device. Nonlinear Dyn. 2015, 82, 731–740. [Google Scholar] [CrossRef]
- Tang, T.-Q.; Yi, Z.-Y.; Zhang, J.; Zheng, N. Modelling the driving behaviour at a signalised intersection with the information of remaining green time. IET Intell. Transp. Syst. 2017, 11, 596–603. [Google Scholar] [CrossRef]
- Zhao, J.; Li, P. An extended car-following model with consideration of speed guidance at intersections. Phys. A Stat. Mech. Its Appl. 2016, 461, 1–8. [Google Scholar] [CrossRef]
- Zhao, J.; Li, P. An extended car-following model with consideration of vehicle to vehicle communication of two conflicting streams. Phys. A Stat. Mech. Its Appl. 2017, 473, 178–187. [Google Scholar] [CrossRef]
- Ci, Y.; Wu, L.; Zhao, J.; Sun, Y.; Zhang, G. V2I-based car-following modeling and simulation of signalized intersection. Phys. A Stat. Mech. Its Appl. 2019, 525, 672–679. [Google Scholar] [CrossRef]
- Lenz, H.; Wagner, C.K.; Sollacher, R. Multi-anticipative car-following model. Eur. Phys. J. B 1999, 7, 331–335. [Google Scholar] [CrossRef]
- Ge, H.X.; Dai, S.Q.; Dong, L.Y.; Xue, Y. Stabilization effect of traffic flow in an extended car-following model based on an intelligent transportation system application. Phys. Rev. E 2004, 70, 066134. [Google Scholar] [CrossRef]
- Nagatani, T. Stabilization and enhancement of traffic flow by the next-nearest-neighbor interaction. Phys. Rev. E 1999, 60, 6395–6401. [Google Scholar] [CrossRef] [PubMed]
- Wilson, R.E.; Berg, P.; Hooper, S.; Lunt, G. Many-neighbour interaction and non-locality in traffic models. Eur. Phys. J. B 2004, 39, 397–408. [Google Scholar] [CrossRef]
- Li, Z.-P.; Liu, Y.-C. Analysis of stability and density waves of traffic flow model in an ITS environment. Eur. Phys. J. B-Condens. Matter Complex Syst. 2006, 53, 367–374. [Google Scholar] [CrossRef]
- Tao, W.; Gou, Z.-Y.; Zhao, X.-M. Multiple velocity difference model and its stability analysis. Acta Phys. Sin. 2006, 55, 634–640. [Google Scholar] [CrossRef]
- Yu, L.; Shi, Z.; Zhou, B. Kink–antikink density wave of an extended car-following model in a cooperative driving system. Commun. Nonlinear Sci. Numer. Simul. 2008, 13, 2167–2176. [Google Scholar] [CrossRef]
- Xie, D.F.; Gao, Z.Y.; Zhao, X.M. Stabilization of Traffic Flow Based on the Multiple Information of Preceding Cars. Commun. Comput. Phys. 2008, 3, 899–912. [Google Scholar]
- Peng, G.H.; Sun, D.H. A dynamical model of car-following with the consideration of the multiple information of preceding cars. Phys. Lett. A 2010, 374, 1694–1698. [Google Scholar] [CrossRef]
- Peng, G.H. Stabilisation analysis of multiple car-following model in traffic flow. Chin. Phys. B 2010, 19, 056401. [Google Scholar] [CrossRef]
- Li, Y.; Sun, D.; Liu, W.; Zhang, M.; Zhao, M.; Liao, X.; Tang, L. Modeling and simulation for microscopic traffic flow based on multiple headway, velocity and acceleration difference. Nonlinear Dyn. 2010, 66, 15–28. [Google Scholar] [CrossRef]
- Peng, G.H.; Cai, X.H.; Liu, C.Q.; Cao, B.F.; Tuo, M.X. Optimal velocity difference model for a car-following theory. Phys. Lett. A 2011, 375, 3973–3977. [Google Scholar] [CrossRef]
- Cao, J.; Shi, Z.; Zhou, J. An extended optimal velocity difference model in a cooperative driving system. Int. J. Mod. Phys. C 2015, 26, 1550054. [Google Scholar] [CrossRef]
- Sawada, S. Nonlinear analysis of a differential-difference equation with next-nearest-neighbour interaction for traffic flow. J. Phys. A Math. Gen. 2001, 34, 11253–11259. [Google Scholar] [CrossRef]
- Jin, Y.; Xu, M.; Gao, Z. KdV and Kink-Antikink Solitons in an Extended Car-Following Model. J. Comput. Nonlinear Dyn. 2011, 6, 011018. [Google Scholar] [CrossRef]
- Yu, S.-W.; Shi, Z.-K. An improved car-following model with two preceding cars’ average speed. Int. J. Mod. Phys. C 2015, 26, 1550094. [Google Scholar] [CrossRef]
- Sun, Y.; Ge, H.; Cheng, R. An extended car-following model under V2V communication environment and its delayed-feedback control. Phys. A Stat. Mech. Its Appl. 2018, 508, 349–358. [Google Scholar] [CrossRef]
- Zhu, W.-X.; Zhang, H.M. Analysis of mixed traffic flow with human-driving and autonomous cars based on car-following model. Phys. A Stat. Mech. Its Appl. 2018, 496, 274–285. [Google Scholar] [CrossRef]
- Cheng, R.; Li, S.; Ge, H. An extended car-following model accounting for two preceding vehicles with mixed maximum velocity. Mod. Phys. Lett. B 2021, 35, 2150238. [Google Scholar] [CrossRef]
- Nakayama, A.; Sugiyama, Y.; Hasebe, K. Effect of looking at the car that follows in an optimal velocity model of traffic flow. Phys. Rev. E 2001, 65, 016112. [Google Scholar] [CrossRef]
- Hasebe, K.; Nakayama, A.; Sugiyama, Y. Dynamical model of a cooperative driving system for freeway traffic. Phys. Rev. E 2003, 68, 026102. [Google Scholar] [CrossRef]
- Ge, H.X.; Zhu, H.B.; Dai, S.Q. Effect of looking backward on traffic flow in a cooperative driving car following model. Eur. Phys. J. B 2006, 54, 503–507. [Google Scholar] [CrossRef]
- Yu, L.; Shi, Z. Nonlinear analysis of an extended traffic flow model in ITS environment. Chaos Solitons Fractals 2008, 36, 550–558. [Google Scholar] [CrossRef]
- Sun, D.-H.; Liao, X.-Y.; Peng, G.-H. Effect of looking backward on traffic flow in an extended multiple car-following model. Phys. A Stat. Mech. Its Appl. 2011, 390, 631–635. [Google Scholar] [CrossRef]
- Sun, D.-H.; Zhang, J.-C.; Zhao, M.; Tian, C. Effect of backward looking and velocity difference in an extended car following model. J. Sichuan Univ. 2012, 49, 115–120. [Google Scholar]
- Yang, S.; Liu, W.; Sun, D.; Li, C. A New Extended Multiple Car-Following Model Considering the Backward-Looking Effect on Traffic Flow. J. Comput. Nonlinear Dyn. 2013, 8, 011016. [Google Scholar] [CrossRef]
- Zeng, Y.-Z.; Zhang, N. Effects of comprehensive information of the nearest following vehicle on traffic flow instability. Acta Phys. Sin. 2014, 63, 218901. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, R. An Extended Non-Lane-Based Optimal Velocity Model with Dynamic Collaboration. Math. Probl. Eng. 2013, 2013, 124908. [Google Scholar] [CrossRef]
- Ma, M.; Ma, G.; Liang, S. Density waves in car-following model for autonomous vehicles with backward looking effect. Appl. Math. Model. 2021, 94, 1–12. [Google Scholar] [CrossRef]
- Zong, F.; Wang, M.; Tang, M.; Li, X.; Zeng, M. An Improved Intelligent Driver Model Considering the Information of Multiple Front and Rear Vehicles. IEEE Access 2021, 9, 66241–66252. [Google Scholar] [CrossRef]
- Ioannou, P.; Xu, Z. Throttle and brake control systems for automatic vehicle following. IVHS J. 1994, 1, 345–377. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, L.; Peeta, S.; He, X.; Zheng, T.; Li, Y. A car-following model considering the effect of electronic throttle opening angle under connected environment. Nonlinear Dyn. 2016, 85, 2115–2125. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, H.; Zheng, T.; Sun, F.; Feng, H.; Zhao, H. Non-lane-discipline-based car-following model incorporating the electronic throttle dynamics under connected environment. Nonlinear Dyn. 2017, 90, 2345–2358. [Google Scholar] [CrossRef]
- Jiao, Y.; Ge, H.; Cheng, R. Nonlinear analysis for a modified continuum model considering electronic throttle (ET) and backward looking effect. Phys. A Stat. Mech. Its Appl. 2019, 535, 122362. [Google Scholar] [CrossRef]
- Qin, Y.; Wang, H.; Chen, Q.; Ran, B. Car-following Model of Connected Cruise Control Vehicles to Mitigate Traffic Oscillations. Promet-Traffic Transp. 2019, 31, 603–610. [Google Scholar] [CrossRef]
- Chen, L.; Zhang, Y.; Li, K.; Li, Q.; Zheng, Q. Car-following model of connected and autonomous vehicles considering both average headway and electronic throttle angle. Mod. Phys. Lett. B 2021, 35, 2150257. [Google Scholar] [CrossRef]
- Sun, D.; Kang, Y.; Yang, S. A novel car following model considering average speed of preceding vehicles group. Phys. A Stat. Mech. Its Appl. 2015, 436, 103–109. [Google Scholar] [CrossRef]
- Kuang, H.; Xu, Z.-P.; Li, X.-L.; Lo, S.-M. An extended car-following model accounting for the average headway effect in intelligent transportation system. Phys. A Stat. Mech. Its Appl. 2017, 471, 778–787. [Google Scholar] [CrossRef]
- Guo, Y.; Xue, Y.; Shi, Y.; Wei, F.-P.; Lü, L.-Z.; He, H.-D. Mean-field velocity difference model considering the average effect of multi-vehicle interaction. Commun. Nonlinear Sci. Numer. Simul. 2018, 59, 553–564. [Google Scholar] [CrossRef]
- Zhu, W.-X.; Zhang, L.-D. A new car-following model for autonomous vehicles flow with mean expected velocity field. Phys. A Stat. Mech. Its Appl. 2018, 492, 2154–2165. [Google Scholar] [CrossRef]
- Kuang, H.; Wang, M.-T.; Lu, F.-H.; Bai, K.-Z.; Li, X.-L. An extended car-following model considering multi-anticipative average velocity effect under V2V environment. Phys. A Stat. Mech. Its Appl. 2019, 527, 121268. [Google Scholar] [CrossRef]
- Cao, X.; Wang, J.; Chen, C. A Modified Car-following Model Considering Traffic Density and Acceleration of Leading Vehicle. Appl. Sci. 2020, 10, 1268. [Google Scholar] [CrossRef]
- Yu, G.; Wang, P.; Wu, X.; Wang, Y. Linear and nonlinear stability analysis of a car-following model considering velocity difference of two adjacent lanes. Nonlinear Dyn. 2016, 84, 387–397. [Google Scholar] [CrossRef]
- Gao, Z.; Zhang, N.; Mannini, L.; Cipriani, E. The Car Following Model with Relative Speed in Front on the Three-Lane Road. Discret. Dyn. Nat. Soc. 2018, 2018, 7560493. [Google Scholar] [CrossRef]
- Wen, H.; Rong, Y.; Zeng, C.; Qi, W. The effect of driver’s characteristics on the stability of traffic flow under honk environment. Nonlinear Dyn. 2016, 84, 1517–1528. [Google Scholar] [CrossRef]
- Yu, B.; Zhou, H.; Wang, L.; Wang, Z.; Cui, S. An extended two-lane car-following model considering the influence of heterogeneous speed information on drivers with different characteristics under honk environment. Phys. A Stat. Mech. Its Appl. 2021, 578, 126022. [Google Scholar] [CrossRef]
- Han, J.; Zhang, J.; Wang, X.; Liu, Y.; Wang, Q.; Zhong, F. An Extended Car-Following Model Considering Generalized Preceding Vehicles in V2X Environment. Future Internet 2020, 12, 216. [Google Scholar] [CrossRef]
- Chen, J.; Shi, Z.; Hu, Y. Stabilization analysis of a multiple look-ahead model with driver reaction delays. Int. J. Mod. Phys. C 2012, 23, 1250048. [Google Scholar] [CrossRef]
- Hu, Y.; Ma, T.; Chen, J. An extended multi-anticipative delay model of traffic flow. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 3128–3135. [Google Scholar] [CrossRef]
- Ngoduy, D. Linear stability of a generalized multi-anticipative car following model with time delays. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 420–426. [Google Scholar] [CrossRef]
- Chen, J.; Liu, R.; Ngoduy, D.; Shi, Z. A new multi-anticipative car-following model with consideration of the desired following distance. Nonlinear Dyn. 2016, 85, 2705–2717. [Google Scholar] [CrossRef]
- Sun, D.; Chen, D.; Zhao, M.; Liu, W.; Zheng, L. Linear stability and nonlinear analyses of traffic waves for the general nonlinear car-following model with multi-time delays. Phys. A Stat. Mech. Its Appl. 2018, 501, 293–307. [Google Scholar] [CrossRef]
- Cao, B.-G. A new car-following model considering driver’s sensory memory. Phys. A Stat. Mech. Its Appl. 2015, 427, 218–225. [Google Scholar] [CrossRef]
- Zhang, G.; Ma, Q.; Pan, D.; Zhang, Y.; Huang, Q.; Jiang, S. Study on the integration effect of multiple vehicles’ delayed velocities on traffic stability in intelligent transportation system environment. Eng. Comput. 2021, 38, 929–940. [Google Scholar] [CrossRef]
- Yu, S.; Shi, Z. An improved car-following model considering headway changes with memory. Phys. A Stat. Mech. Its Appl. 2015, 421, 1–14. [Google Scholar] [CrossRef]
- Yu, S.; Tang, J.; Xin, Q. Relative velocity difference model for the car-following theory. Nonlinear Dyn. 2018, 91, 1415–1428. [Google Scholar] [CrossRef]
- Li, X.; Yang, T.; Liu, J.; Qin, X.; Yu, S. Effects of vehicle gap changes on fuel economy and emission performance of the traffic flow in the ACC strategy. PLoS ONE 2018, 13, e0200110. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, Y.; Lu, G. Extended Desired Safety Margin Car-Following Model That Considers Variation of Historical Perceived Risk and Acceptable Risk. Transp. Res. Rec. 2018, 2672, 86–97. [Google Scholar] [CrossRef]
- Tang, T.Q.; Huang, H.-J.; Zhao, S.G.; Xu, G. An extended OV model with consideration of driver’s memory. Int. J. Mod. Phys. B 2009, 23, 743–752. [Google Scholar] [CrossRef]
- Peng, G.; Lu, W.; He, H.; Gu, Z. Nonlinear analysis of a new car-following model accounting for the optimal velocity changes with memory. Commun. Nonlinear Sci. Numer. Simul. 2016, 40, 197–205. [Google Scholar] [CrossRef]
- Liu, D.-W.; Shi, Z.-K.; Ai, W.-H. Enhanced stability of car-following model upon incorporation of short-term driving memory. Commun. Nonlinear Sci. Numer. Simul. 2017, 47, 139–150. [Google Scholar] [CrossRef]
- Wang, J.; Sun, F.; Ge, H. Effect of the driver’s desire for smooth driving on the car-following model. Phys. A Stat. Mech. Its Appl. 2018, 512, 96–108. [Google Scholar] [CrossRef]
- Wang, Z.; Ge, H.; Cheng, R. Nonlinear analysis for a modified continuum model considering driver’s memory and backward looking effect. Phys. A Stat. Mech. Its Appl. 2018, 508, 18–27. [Google Scholar] [CrossRef]
- Ma, X.; Ge, H.; Cheng, R. Influences of acceleration with memory on stability of traffic flow and vehicle’s fuel consumption. Phys. A Stat. Mech. Its Appl. 2019, 525, 143–154. [Google Scholar] [CrossRef]
- Jafaripournimchahi, A.; Sun, L.; Hu, W. Driver’s Anticipation and Memory Driving Car-Following Model. J. Adv. Transp. 2020, 2020, 4343658. [Google Scholar] [CrossRef]
- Wang, X.; Jiang, R.; Li, L.; Lin, Y.-L.; Wang, F.-Y. Long memory is important: A test study on deep-learning based car-following model. Phys. A Stat. Mech. Its Appl. 2019, 514, 786–795. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, Y.; Pan, D.-B.; Sang, C.-Y. Study on the interval integration effect of vehicle’s self-delayed velocity on traffic stability in micro traffic modeling. Phys. A Stat. Mech. Its Appl. 2019, 533, 121941. [Google Scholar] [CrossRef]
- Zhang, G.; Yin, L.; Pan, D.-B.; Zhang, Y.; Cui, B.-Y.; Jiang, S. Research on multiple vehicles’ continuous self-delayed velocities on traffic flow with vehicle-to-vehicle communication. Phys. A Stat. Mech. Its Appl. 2020, 541, 123704. [Google Scholar] [CrossRef]
- Ma, G.; Ma, M.; Liang, S.; Wang, Y.; Guo, H. Nonlinear analysis of the car-following model considering headway changes with memory and backward looking effect. Phys. A Stat. Mech. Its Appl. 2021, 562, 125303. [Google Scholar] [CrossRef]
- Konishi, K.; Kokame, H.; Hirata, K. Coupled map car-following model and its delayed-feedback control. Phys. Rev. E 1999, 60, 4000–4007. [Google Scholar] [CrossRef]
- Zhao, X.; Gao, Z. A control method for congested traffic induced by bottlenecks in the coupled map car-following model. Phys. A Stat. Mech. Its Appl. 2006, 366, 513–522. [Google Scholar] [CrossRef]
- Han, X.-L.; Jiang, C.-Y.; Ge, H.-X.; Dai, S.-Q. A modified coupled map car-following model based on application of intelligent transportation system and control of traffic congestion. Acta Phys. Sin. 2007, 56, 4383–4392. [Google Scholar] [CrossRef]
- Shen, F.-Y.; Ge, H.-X.; Zhang, H.; Yu, H.-M.; Li, L. A control method for congested traffic in the coupled map car-following model. Chin. Phys. B 2009, 18, 4208. [Google Scholar] [CrossRef]
- Yu, H.-M.; Cheng, R.-J.; Ge, H.-X. Considering Backward Effect in Coupled Map Car-Following Model. Commun. Theor. Phys. 2010, 54, 117–122. [Google Scholar] [CrossRef]
- Sun, D.-H.; Zhou, T.; Liu, W.-N.; Zheng, L.-J. A modified feedback controlled car-following model considering the comprehensive information of the nearest-neighbor leading car. Acta Phys. Sin. 2013, 62, 170503. [Google Scholar] [CrossRef]
- Yao, J.; Huang, J.-Y.; Chen, G.-R.; Xu, W.-S. A new coupled-map car-following model based on a transportation supernetwork framework. Chin. Phys. B 2013, 22, 060208. [Google Scholar] [CrossRef]
- Shi, Y.F.; Yang, L.C. Improved coupled map car-following model considering partial car-to-car communication and its jam analysis. Can. J. Phys. 2017, 95, 1096–1102. [Google Scholar] [CrossRef]
- Zheng, Y.-Z.; Cheng, R.-J.; Ge, H.-X. Multiple Information Feedback Control Scheme for an Improved Car-Following Model. Asian J. Control 2017, 19, 215–223. [Google Scholar] [CrossRef]
- Peng, G.; Yang, S.; Xia, D.; Li, X. Delayed-feedback control in a car-following model with the combination of V2V communication. Phys. A Stat. Mech. Its Appl. 2019, 526, 120912. [Google Scholar] [CrossRef]
- Hoogendoorn, S.P.; Hoogendoorn, R. Calibration of microscopic traffic-flow models using multiple data sources. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2010, 368, 4497–4517. [Google Scholar] [CrossRef]
- Hoogendoorn, S.P.; Hoogendoorn, R. Generic Calibration Framework for Joint Estimation of Car-Following Models by Using Microscopic Data. Transp. Res. Rec. 2010, 2188, 37–45. [Google Scholar] [CrossRef]
- Jin, P.J.; Yang, D.; Ran, B. Reducing the Error Accumulation in Car-Following Models Calibrated with Vehicle Trajectory Data. IEEE Trans. Intell. Transp. Syst. 2014, 15, 148–157. [Google Scholar] [CrossRef]
- Li, L.; Chen, X.; Zhang, L. A global optimization algorithm for trajectory data based car-following model calibration. Transp. Res. Part C Emerg. Technol. 2016, 68, 311–332. [Google Scholar] [CrossRef]
- Keane, R.; Gao, H.O. Fast Calibration of Car-Following Models to Trajectory Data Using the Adjoint Method. Transp. Sci. 2021, 55, 592–615. [Google Scholar] [CrossRef]
- Papathanasopoulou, V.; Markou, I.; Antoniou, C. Online calibration for microscopic traffic simulation and dynamic multi-step prediction of traffic speed. Transp. Res. Part C Emerg. Technol. 2016, 68, 144–159. [Google Scholar] [CrossRef]
- Pop, M.-D.; Proștean, O.; David, T.-M.; Proștean, G. Hybrid Solution Combining Kalman Filtering with Takagi-Sugeno Fuzzy Inference System for Online Car-Following Model Calibration. Sensors 2020, 20, 5539. [Google Scholar] [CrossRef]
- Kim, J.; Mahmassani, H.S. Correlated Parameters in Driving Behavior Models: Car-following example and implications for traffic microsimulation. Transp. Res. Rec. 2011, 2249, 62–77. [Google Scholar] [CrossRef]
- Punzo, V.; Ciuffo, B.; Montanino, M. Can Results of car-following Model Calibration Based on Trajectory Data be Trusted? Transp. Res. Rec. 2012, 2315, 11–24. [Google Scholar] [CrossRef]
- Punzo, V.; Montanino, M.; Ciuffo, B. Do We Really Need to Calibrate All the Parameters? Variance-Based Sensitivity Analysis to Simplify Microscopic Traffic Flow Models. IEEE Trans. Intell. Transp. Syst. 2015, 16, 184–193. [Google Scholar] [CrossRef]
- Shao, C.-Q.; Liu, X.-M.; Zhang, Z.-Y. Calibrating Car-Following Model Considering Measurement Errors. Adv. Mech. Eng. 2013, 5, 890741. [Google Scholar] [CrossRef]
- Sharma, A.; Zheng, Z.; Bhaskar, A. A pattern recognition algorithm for assessing trajectory completeness. Transp. Res. Part C Emerg. Technol. 2018, 96, 432–457. [Google Scholar] [CrossRef]
- Valero-Mora, P.M.; Tontsch, A.; Welsh, R.; Morris, A.; Reed, S.; Touliou, K.; Margaritis, D. Is naturalistic driving research possible with highly instrumented cars? Lessons learnt in three research centres. Accid. Anal. Prev. 2013, 58, 187–194. [Google Scholar] [CrossRef] [PubMed]
- Monteil, J.; Billot, R.; Sau, J.; Buisson, C.; El Faouzi, N.-E. Calibration, Estimation, and Sampling Issues of Car-Following Parameters. Transp. Res. Rec. 2014, 2422, 131–140. [Google Scholar] [CrossRef]
- Monteil, J.; Billot, R.; Sau, J.; El Faouzi, N.-E. Linear and Weakly Nonlinear Stability Analyses of Cooperative Car-Following Models. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2001–2013. [Google Scholar] [CrossRef]
- Meng, X.-P.; Li, Z.-P.; Ge, H.-X. Stability Analysis for Car Following Model Based on Control Theory. Commun. Theor. Phys. 2014, 61, 636–640. [Google Scholar] [CrossRef]
- Liu, F.; Cheng, R.; Ge, H.; Yu, C. A new car-following model with consideration of the velocity difference between the current speed and the historical speed of the leading car. Phys. A Stat. Mech. Its Appl. 2016, 464, 267–277. [Google Scholar] [CrossRef]
- Sun, J.; Zheng, Z.; Sun, J. Stability analysis methods and their applicability to car-following models in conventional and connected environments. Transp. Res. Part B Methodol. 2018, 109, 212–237. [Google Scholar] [CrossRef]
- Chen, D.; Sun, D.; Zhao, M.; He, Y.; Liu, H. Weakly nonlinear analysis for car-following model with consideration of cooperation and time delays. Mod. Phys. Lett. B 2018, 32, 1850241. [Google Scholar] [CrossRef]
- Chen, C.; Ge, H.; Cheng, R. Self-stabilizing analysis of an extended car-following model with consideration of expected effect. Phys. A Stat. Mech. Its Appl. 2019, 535, 122423. [Google Scholar] [CrossRef]
- Ngoduy, D.; Li, T. Hopf bifurcation structure of a generic car-following model with multiple time delays. Transp. A Transp. Sci. 2021, 17, 878–896. [Google Scholar] [CrossRef]
- Zhang, H.M. Driver memory, traffic viscosity and a viscous vehicular traffic flow model. Transp. Res. Part B Methodol. 2003, 37, 27–41. [Google Scholar] [CrossRef]
- Tang, T.; Huang, H.-J.; Shang, H. A new macro model for traffic flow with the consideration of the driver’s forecast effect. Phys. Lett. A 2010, 374, 1668–1672. [Google Scholar] [CrossRef]
- Song, T.; Li, X.-L.; Kuang, H.; Dong, L.-Y. A New Continuum Traffic Model with the Effect of Viscosity. J. Hydrodyn. 2011, 23, 164–169. [Google Scholar] [CrossRef]
- Kang, Y.-R.; Sun, D.-H.; Yang, S.-H. A New Macro Model Considering the Average Speed of Preceding Vehicles Group in CPS Environment. Math. Probl. Eng. 2015, 2015, 960630. [Google Scholar] [CrossRef][Green Version]
- Jiao, Y.; Cheng, R.; Ge, H. A New Continuum Model considering Driving Behaviors and Electronic Throttle Effect on a Gradient Highway. Math. Probl. Eng. 2020, 2020, 2172156. [Google Scholar] [CrossRef]
- Sun, L.; Jafaripournimchahi, A.; Hu, W. A forward-looking anticipative viscous high-order continuum model considering two leading vehicles for traffic flow through wireless V2X communication in autonomous and connected vehicle environment. Phys. A Stat. Mech. Its Appl. 2020, 556, 124589. [Google Scholar] [CrossRef]
- Yu, L. A new continuum traffic flow model with two delays. Phys. A Stat. Mech. Its Appl. 2020, 545, 123757. [Google Scholar] [CrossRef]
- Wang, X.; Han, J.; Bai, C.; Shi, H.; Zhang, J.; Wang, G. Research on the Impacts of Generalized Preceding Vehicle Information on Traffic Flow in V2X Environment. Future Internet 2021, 13, 88. [Google Scholar] [CrossRef]
- Ahn, K.; Rakha, H.; Trani, A.; van Aerde, M. Estimating Vehicle Fuel Consumption and Emissions based on Instantaneous Speed and Acceleration Levels. J. Transp. Eng. 2002, 128, 182–190. [Google Scholar] [CrossRef]
- Yu, S.; Huang, M.; Ren, J.; Shi, Z. An improved car-following model considering velocity fluctuation of the immediately ahead car. Phys. A Stat. Mech. Its Appl. 2016, 449, 1–17. [Google Scholar] [CrossRef]
- Yu, S.; Shi, Z. An improved car-following model considering relative velocity fluctuation. Commun. Nonlinear Sci. Numer. Simul. 2016, 36, 319–326. [Google Scholar] [CrossRef]
- Guo, L.; Zhao, X.; Yu, S.; Li, X.; Shi, Z. An improved car-following model with multiple preceding cars’ velocity fluctuation feedback. Phys. A Stat. Mech. Its Appl. 2017, 471, 436–444. [Google Scholar] [CrossRef]
- Jiao, S.; Zhang, S.; Zhou, B.; Zhang, Z.; Xue, L. An Extended Car-Following Model Considering the Drivers’ Characteristics under a V2V Communication Environment. Sustainability 2020, 12, 1552. [Google Scholar] [CrossRef]
- Xiao, Y.; Liu, Y.; Song, X.; Wu, Y. Linked vehicle model: A simple car-following model for automated vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 235, 854–870. [Google Scholar] [CrossRef]
- Chowdhury, D.; Santen, L.; Schadschneider, A. Statistical physics of vehicular traffic and some related systems. Phys. Rep. 2000, 329, 199–329. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Research | Information 1 | Expression 2 |
|---|---|---|
| [34] | position | |
| [35] | position | |
| [38] | velocity | |
| [39] | velocity | |
| [40] | position | |
| [41] | position, velocity | |
| [42] | position, velocity | |
| [44] | position, velocity acceleration | |
| [46] | position |
| Research | Information | Expression |
|---|---|---|
| [53] | position | |
| [54] | position | |
| [55] | position | |
| [56] | velocity | |
| [57] | position, velocity | |
| [58] | position | |
| [61] | position, velocity | |
| [59] | position, velocity | |
| [60] | position, velocity | |
| [62] | position, velocity | |
| [63] | velocity, acceleration |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, J.; Shi, H.; Chen, L.; Li, H.; Wang, X. The Car-Following Model and Its Applications in the V2X Environment: A Historical Review. Future Internet 2022, 14, 14. https://doi.org/10.3390/fi14010014
Han J, Shi H, Chen L, Li H, Wang X. The Car-Following Model and Its Applications in the V2X Environment: A Historical Review. Future Internet. 2022; 14(1):14. https://doi.org/10.3390/fi14010014
Chicago/Turabian StyleHan, Junyan, Huili Shi, Longfei Chen, Hao Li, and Xiaoyuan Wang. 2022. "The Car-Following Model and Its Applications in the V2X Environment: A Historical Review" Future Internet 14, no. 1: 14. https://doi.org/10.3390/fi14010014
APA StyleHan, J., Shi, H., Chen, L., Li, H., & Wang, X. (2022). The Car-Following Model and Its Applications in the V2X Environment: A Historical Review. Future Internet, 14(1), 14. https://doi.org/10.3390/fi14010014