An Environmentally Aware Scheme of Wireless Sensor Networks for Forest Fire Monitoring and Detection

Abstract
:1. Introduction
2. Related Works
3. Proposed Fires Monitoring and Detection Framework
- A WSN deployed in forest environment should consume energy very efficiently and energy consumption also should be balanced fairly among nodes.
- It should have the capability to detect a forest fire as early as possible and to estimate the fire location accurately.
- It is important for firefighting to be able to forecast the spread direction and speed of forest fires.
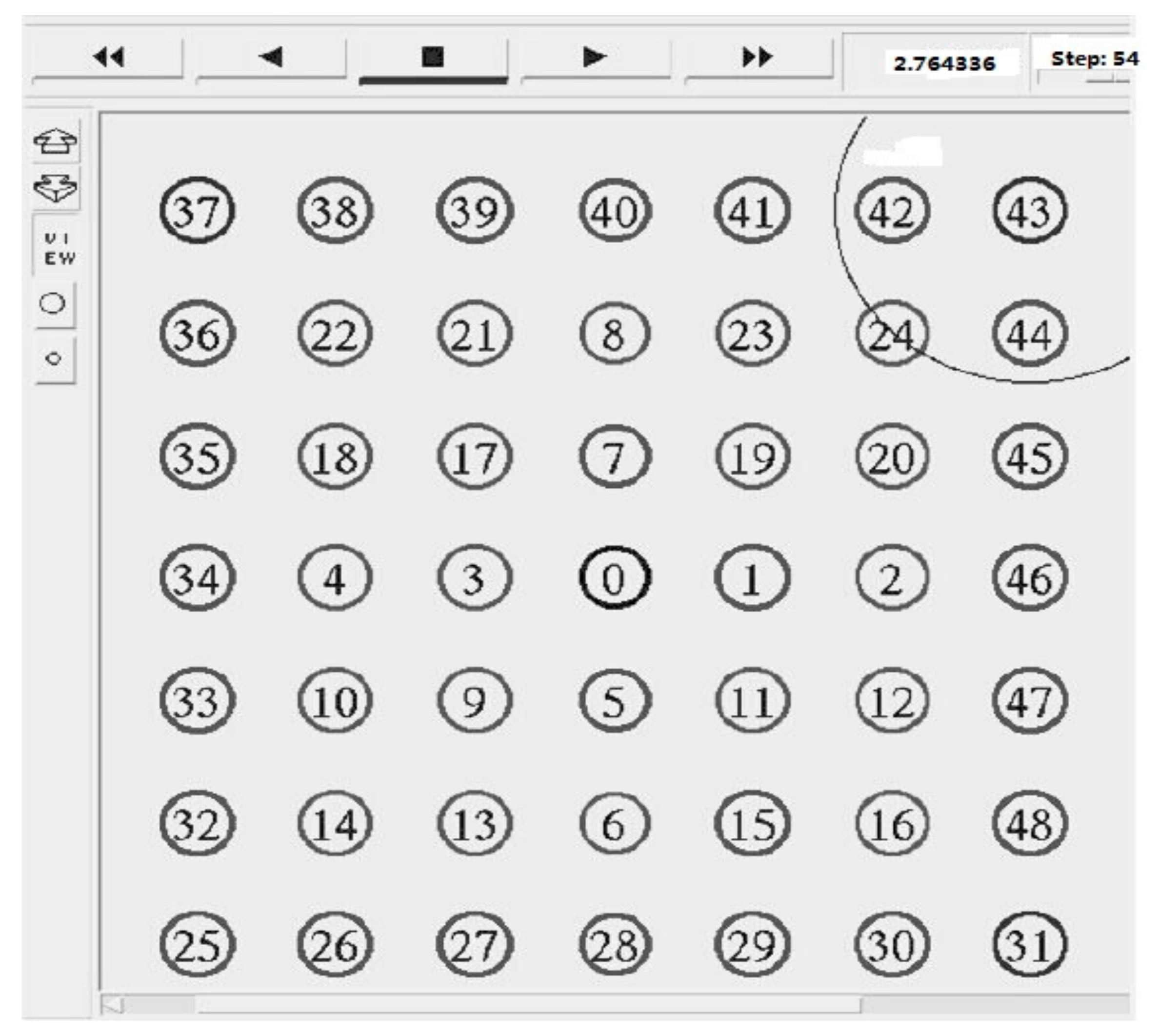
3.1. The Proposed Sensor Deployment Scheme
| Algorithm 1. The pseudo-code of the algorithm to calculate FOD. |
|
3.2. The Proposed Clustered Hierarchy Network Architecture
3.3. The Proposed Intra-Cluster and Inter-Cluster Protocols
4. Simulation Setting and Results Analysis
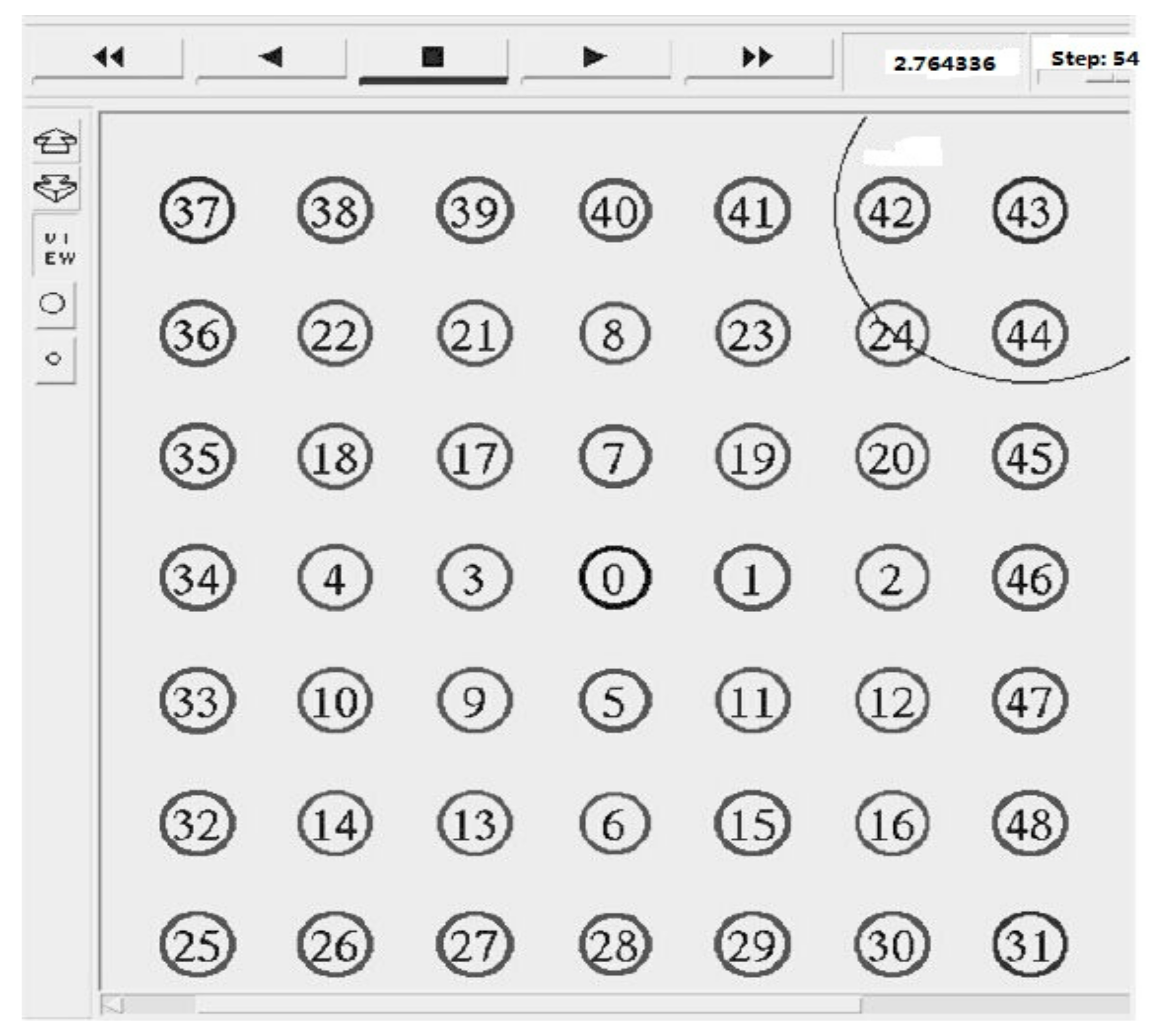
4.1. Simulation Model
4.2. Results and Discussion
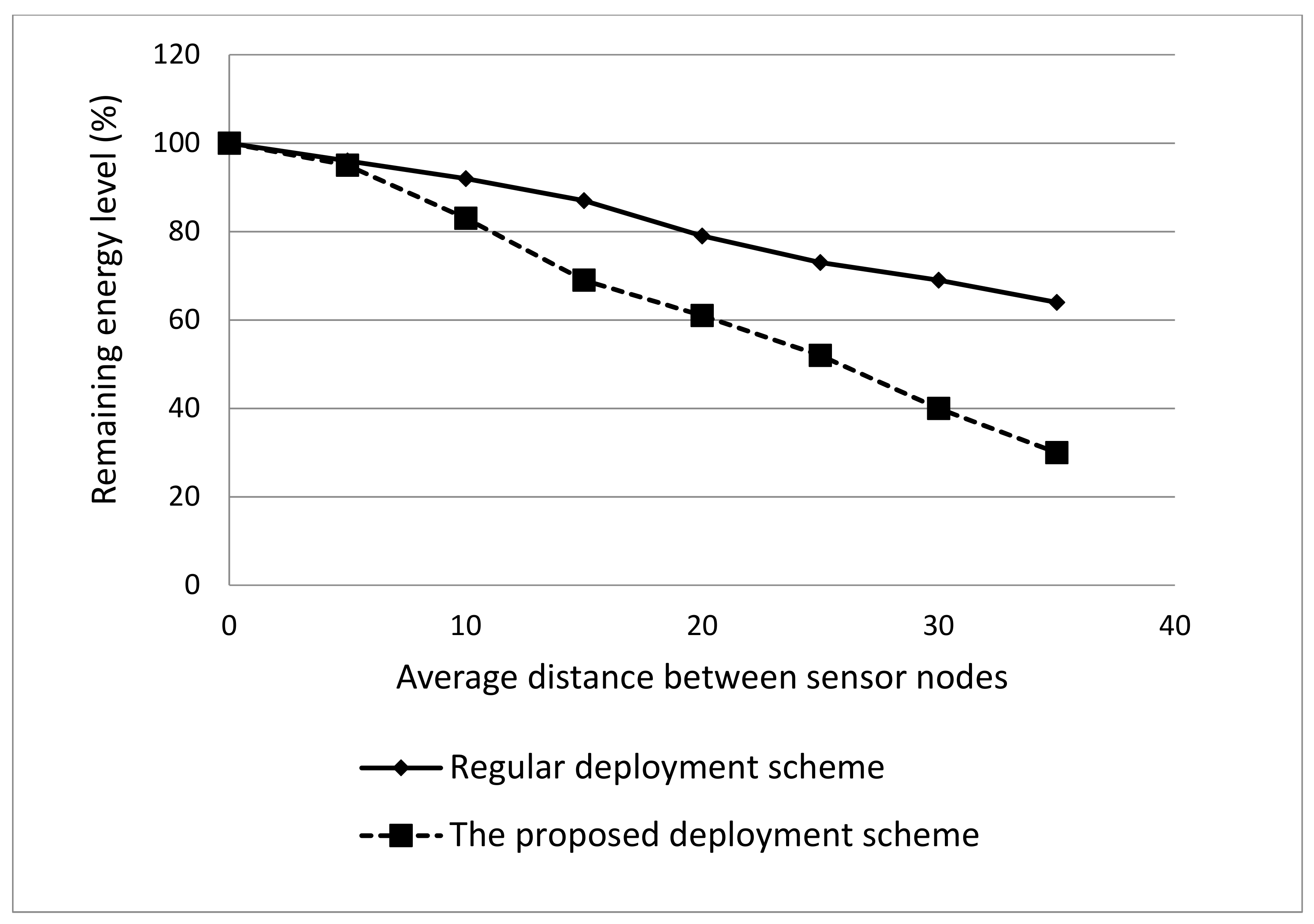
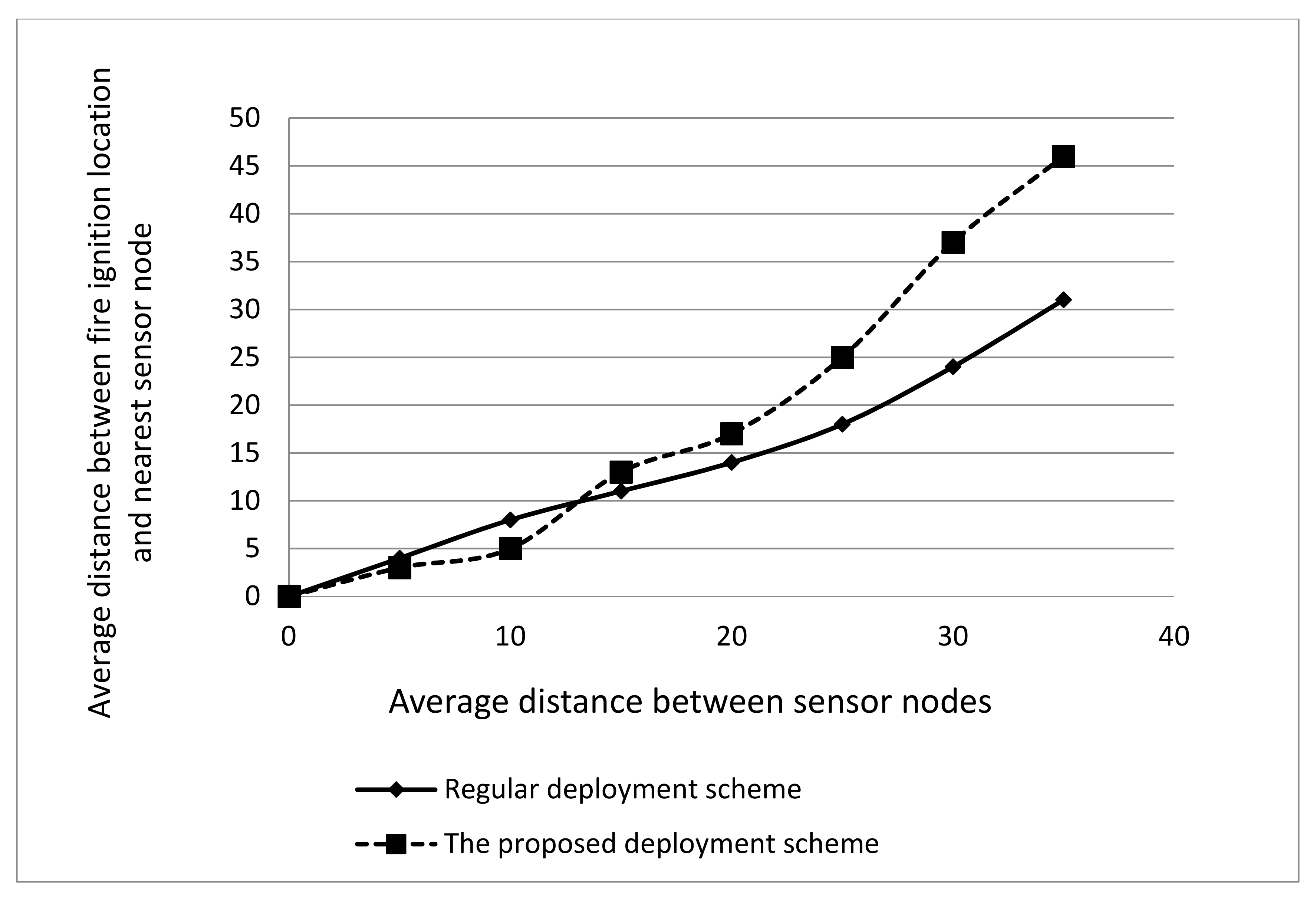
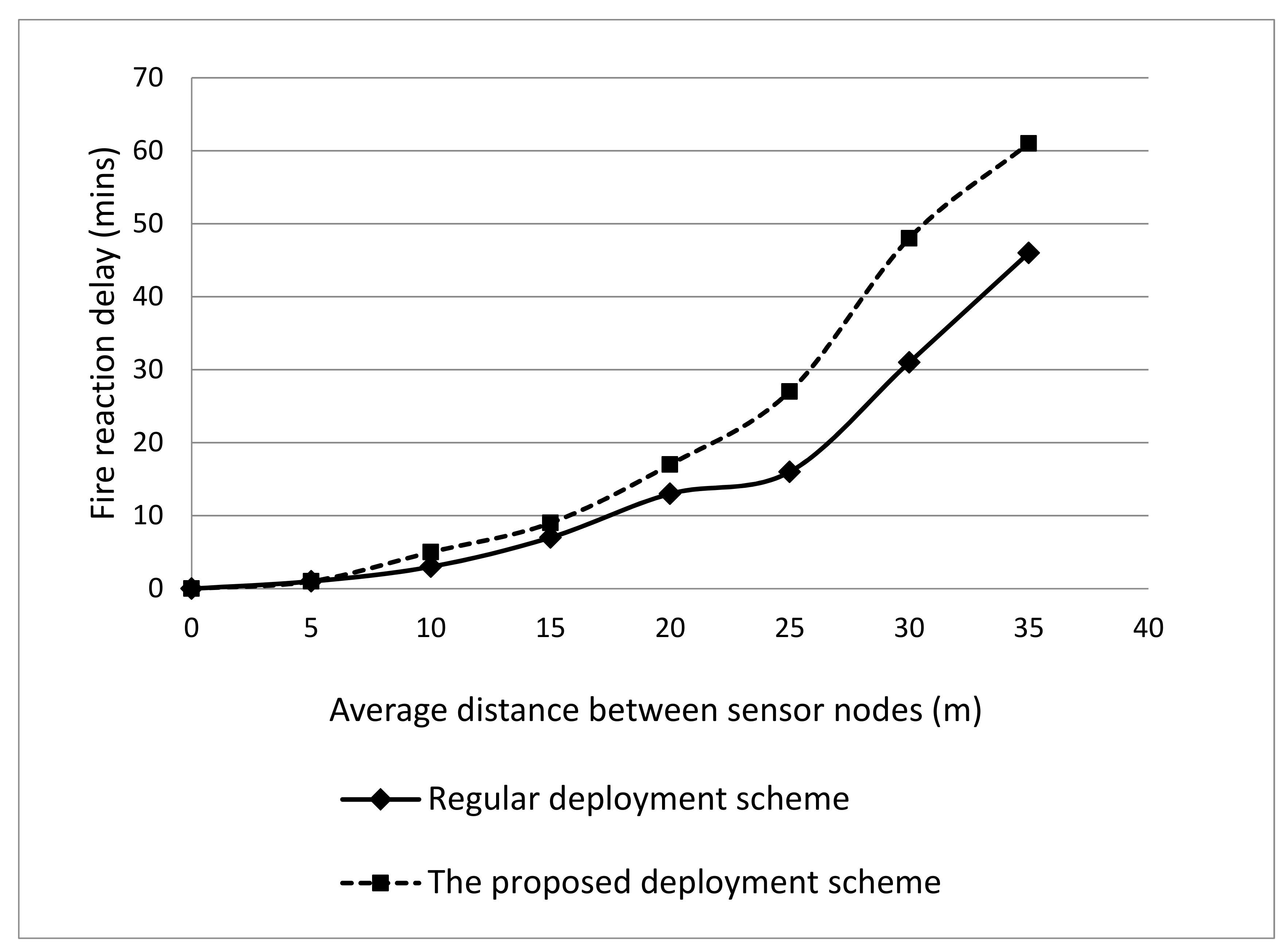
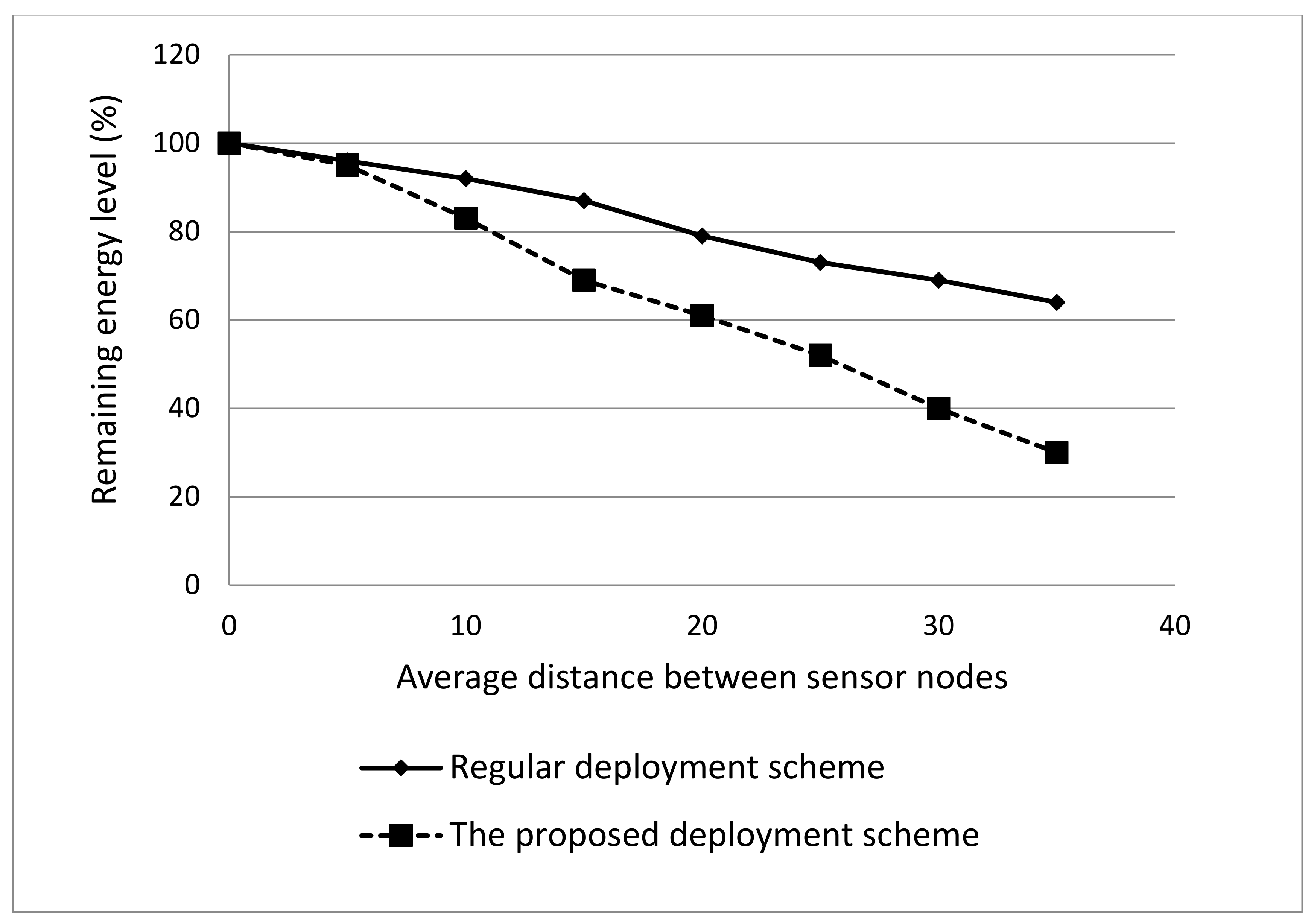
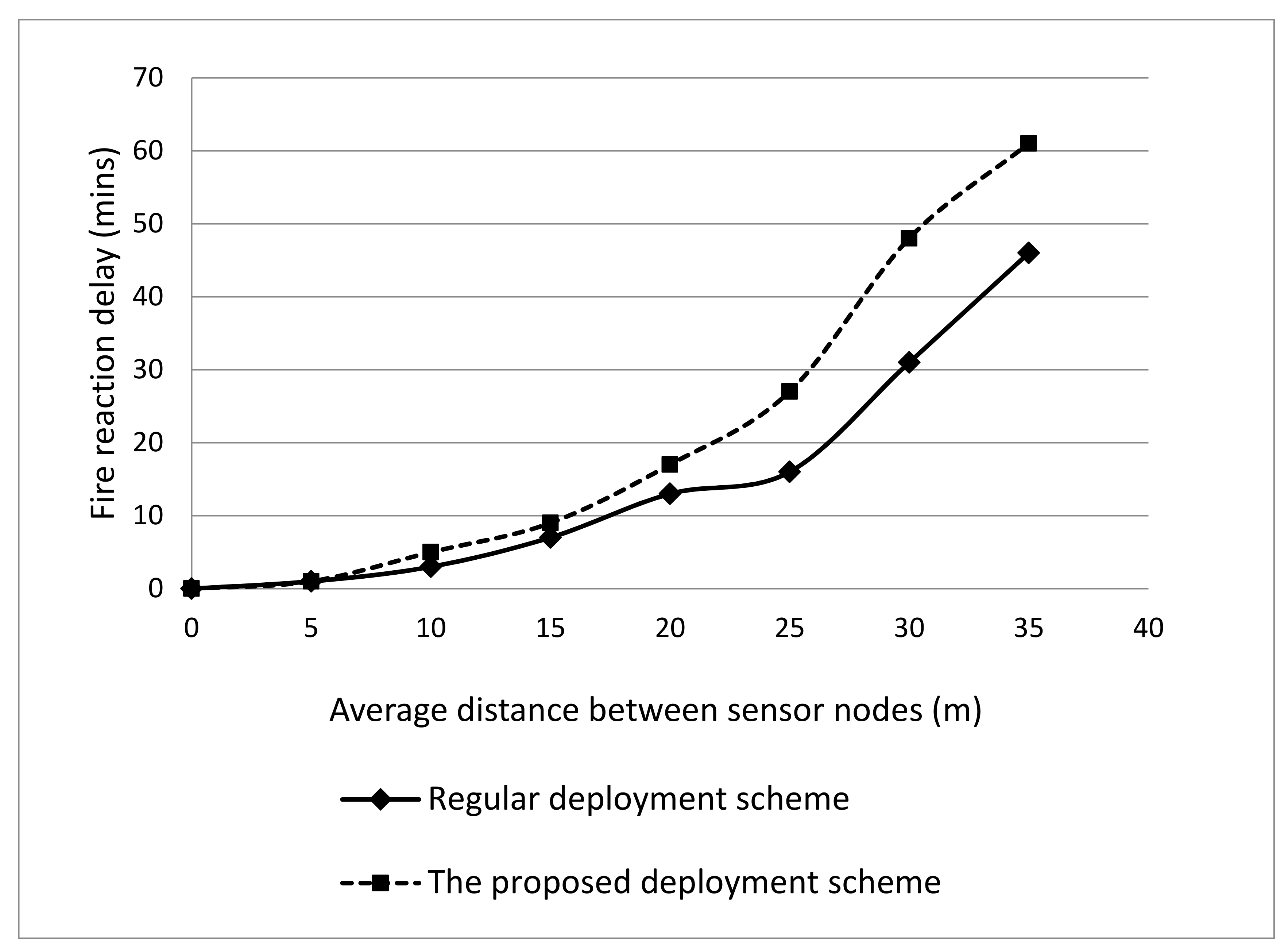
4.2.1. Performance Evaluation on the Proposed Sensor Deployment Scheme
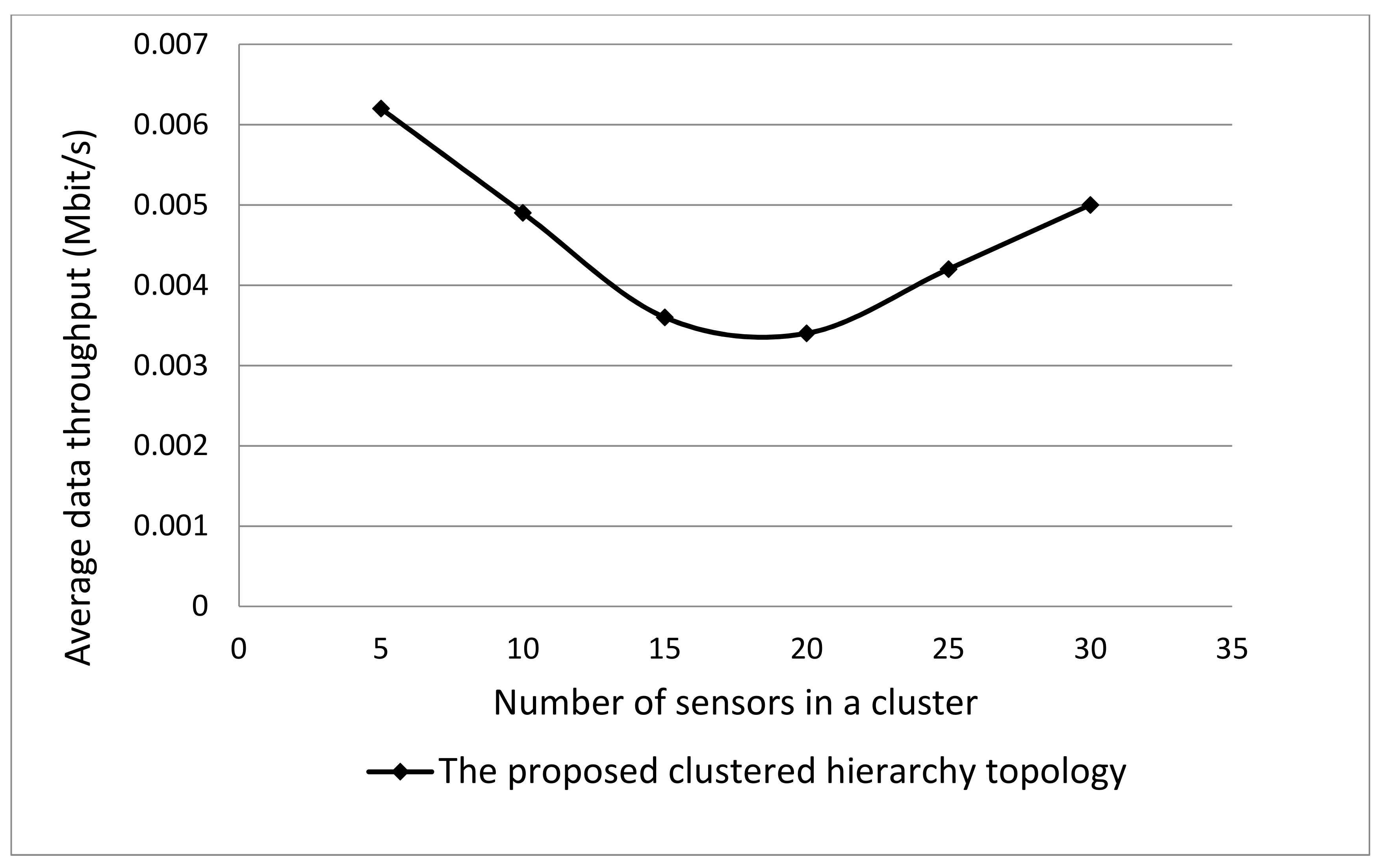
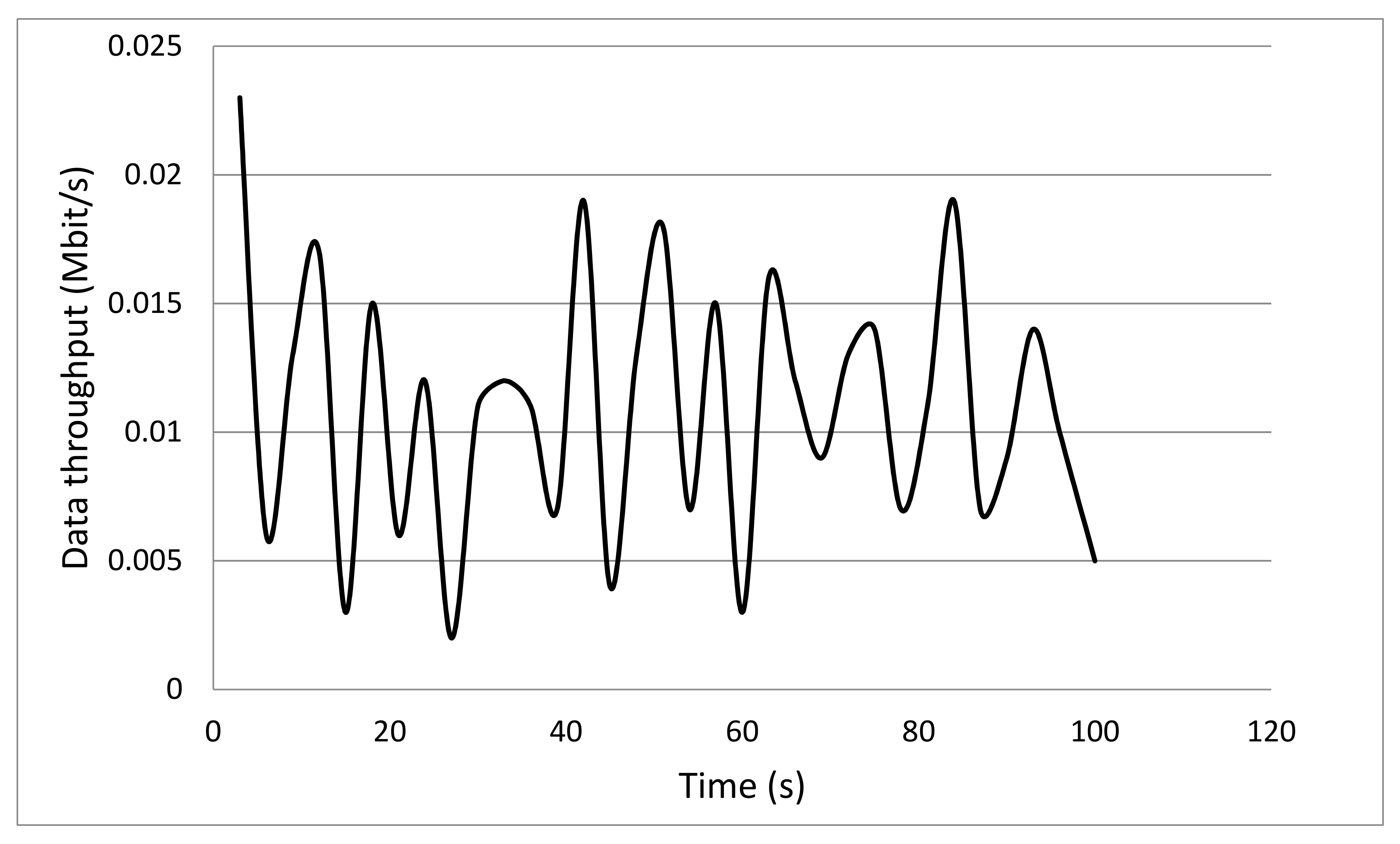
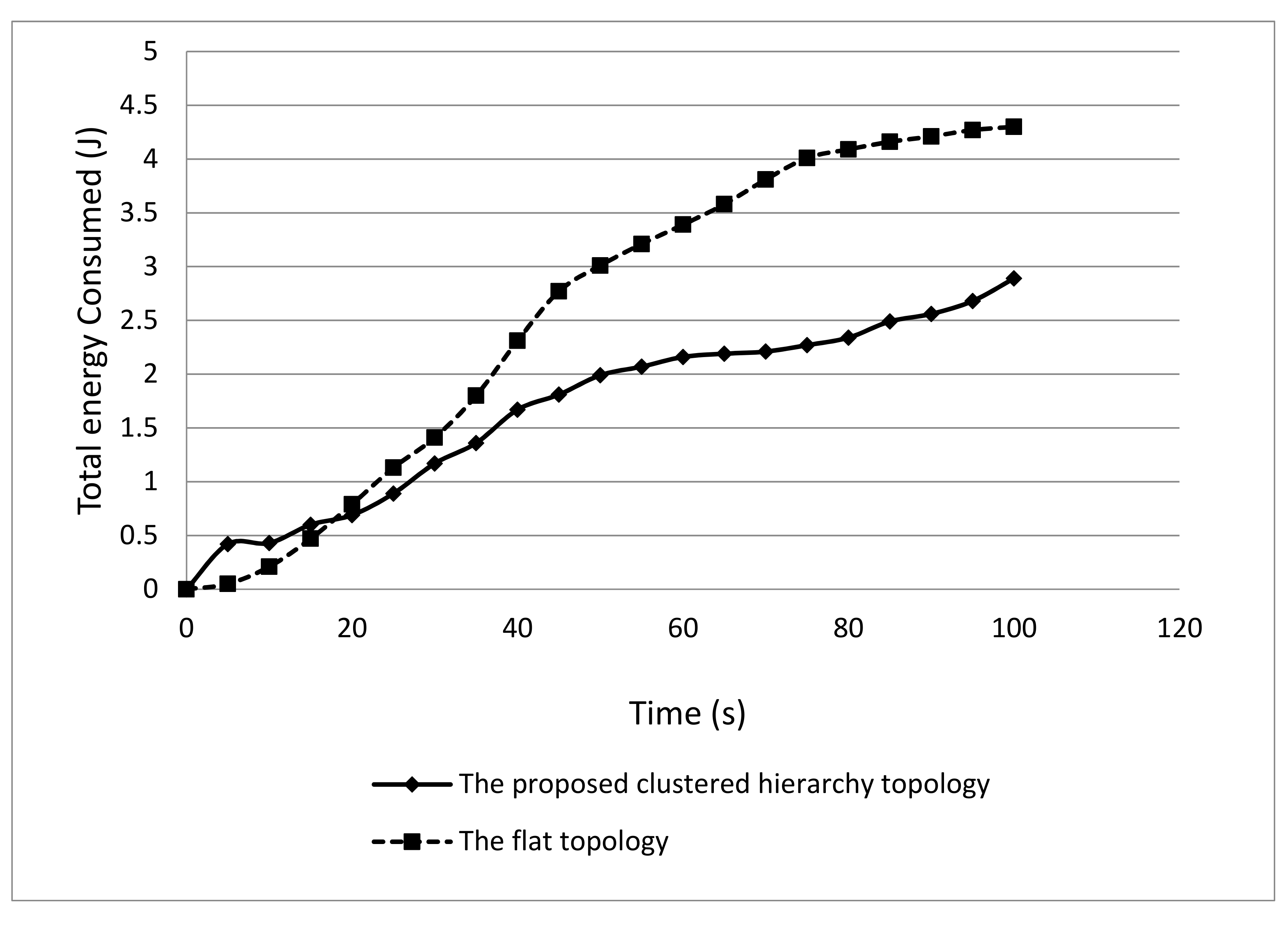
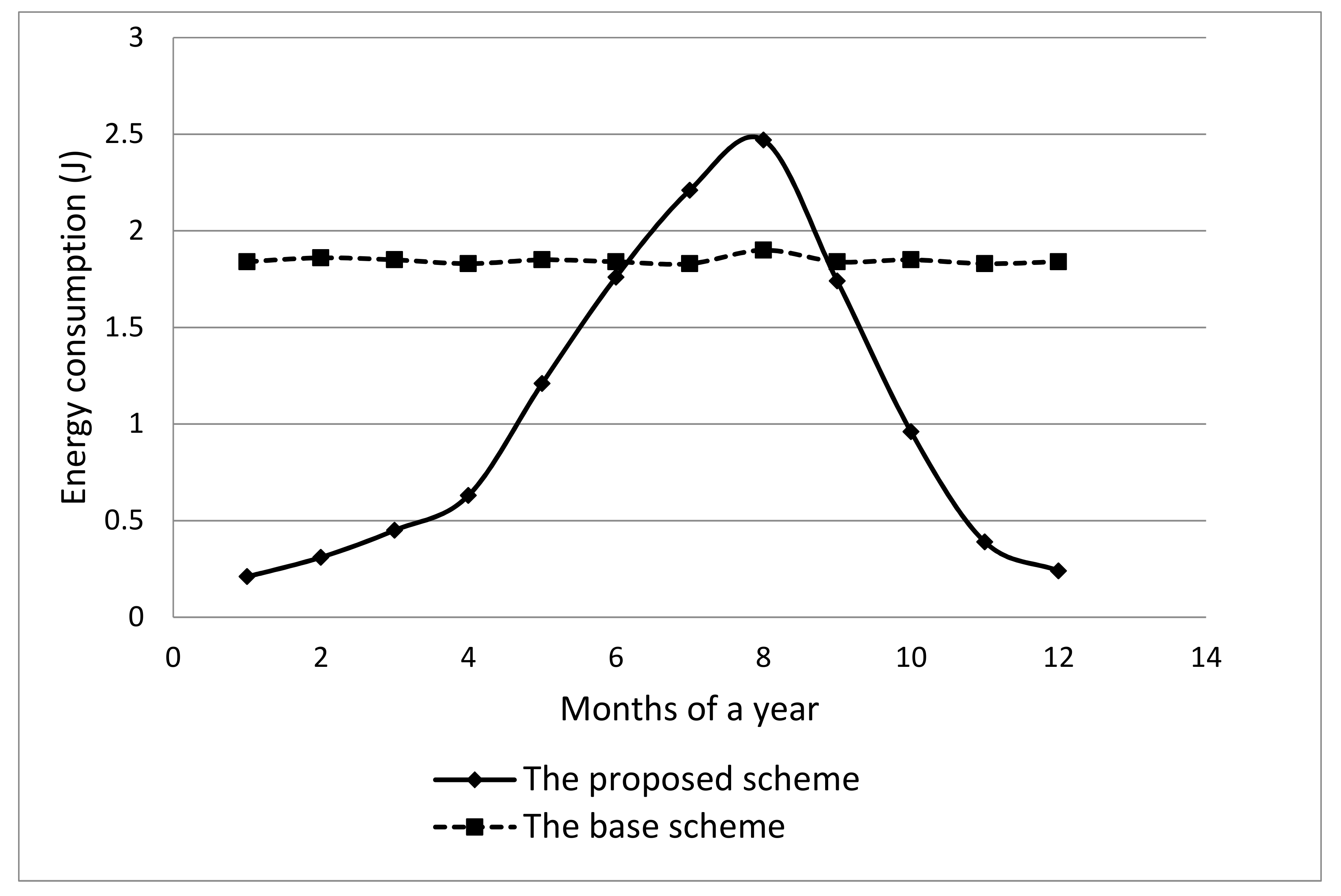
4.2.2. Performance Evaluation on the Proposed Clustered Hierarchy Network Architecture
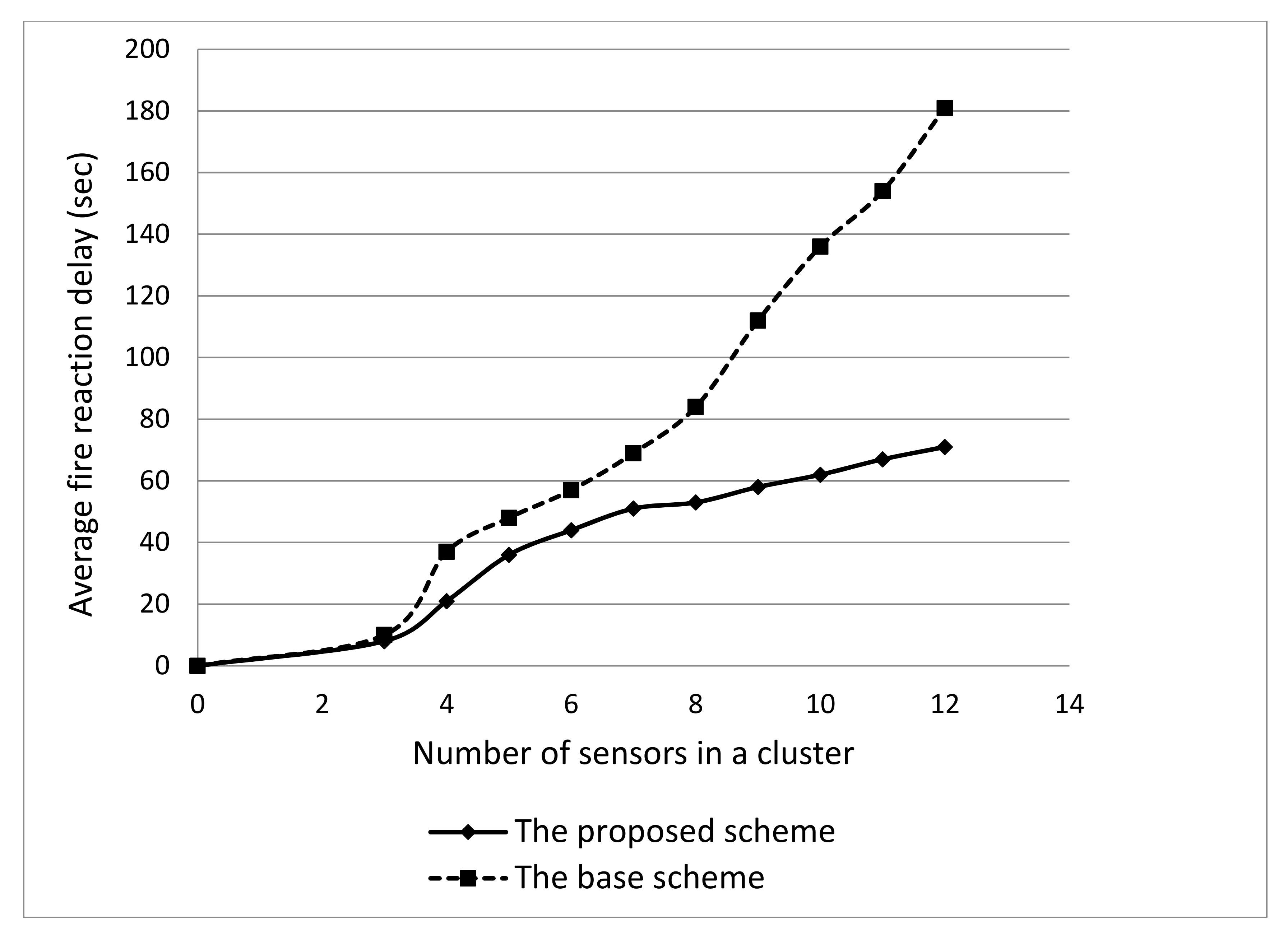
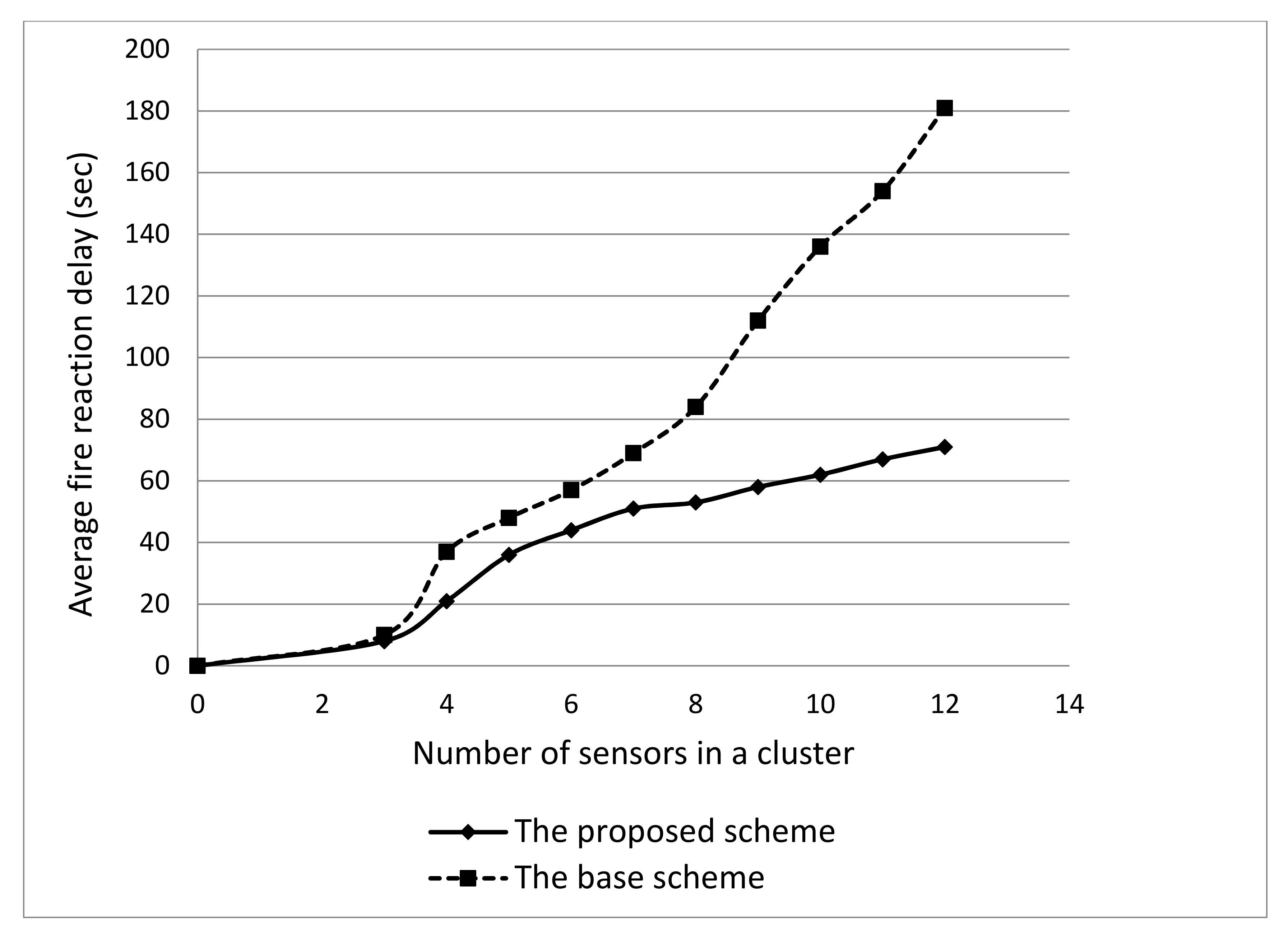
4.2.3. Performance Evaluation on the Proposed Intra-Cluster and Inter-Cluster Protocols
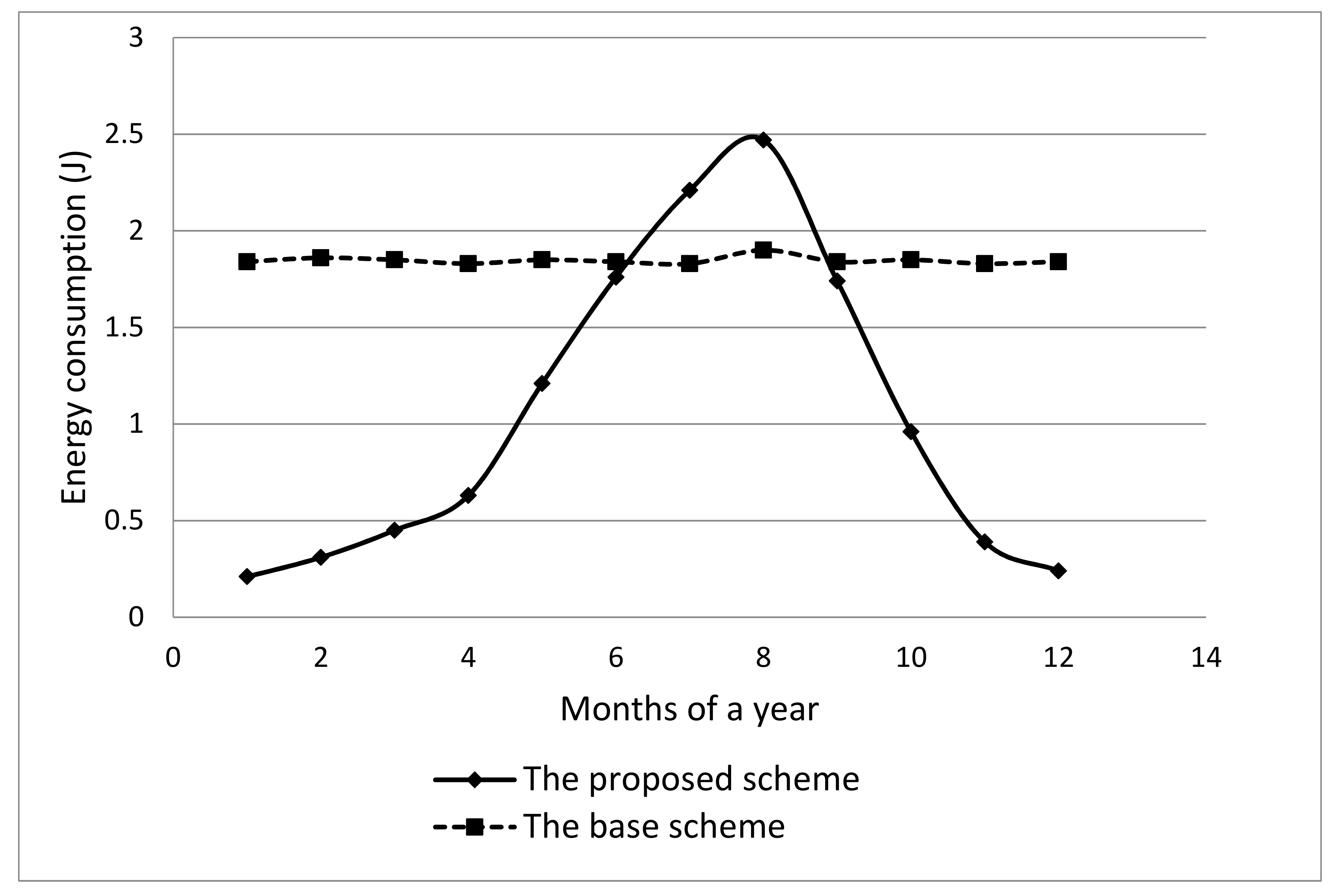
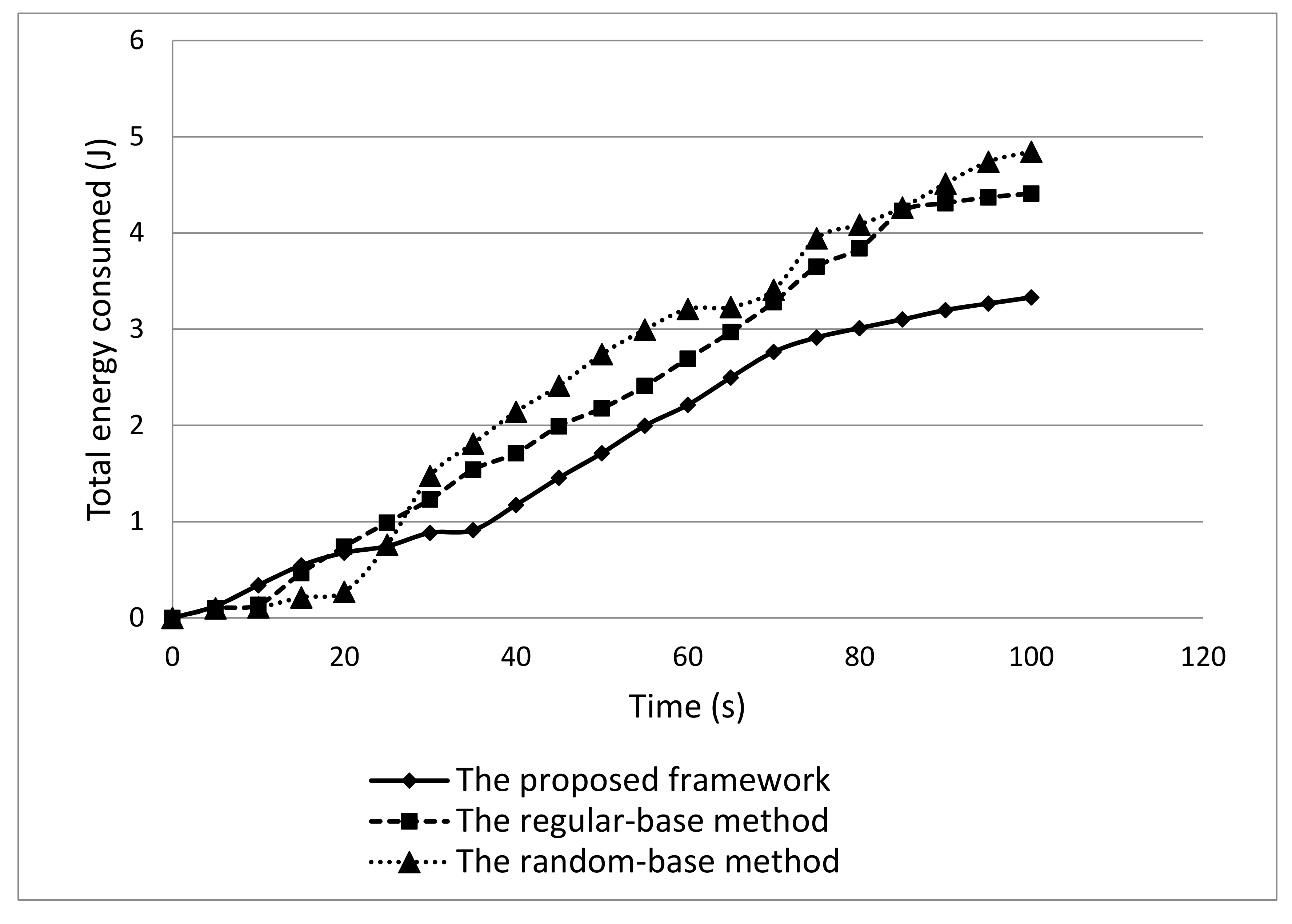
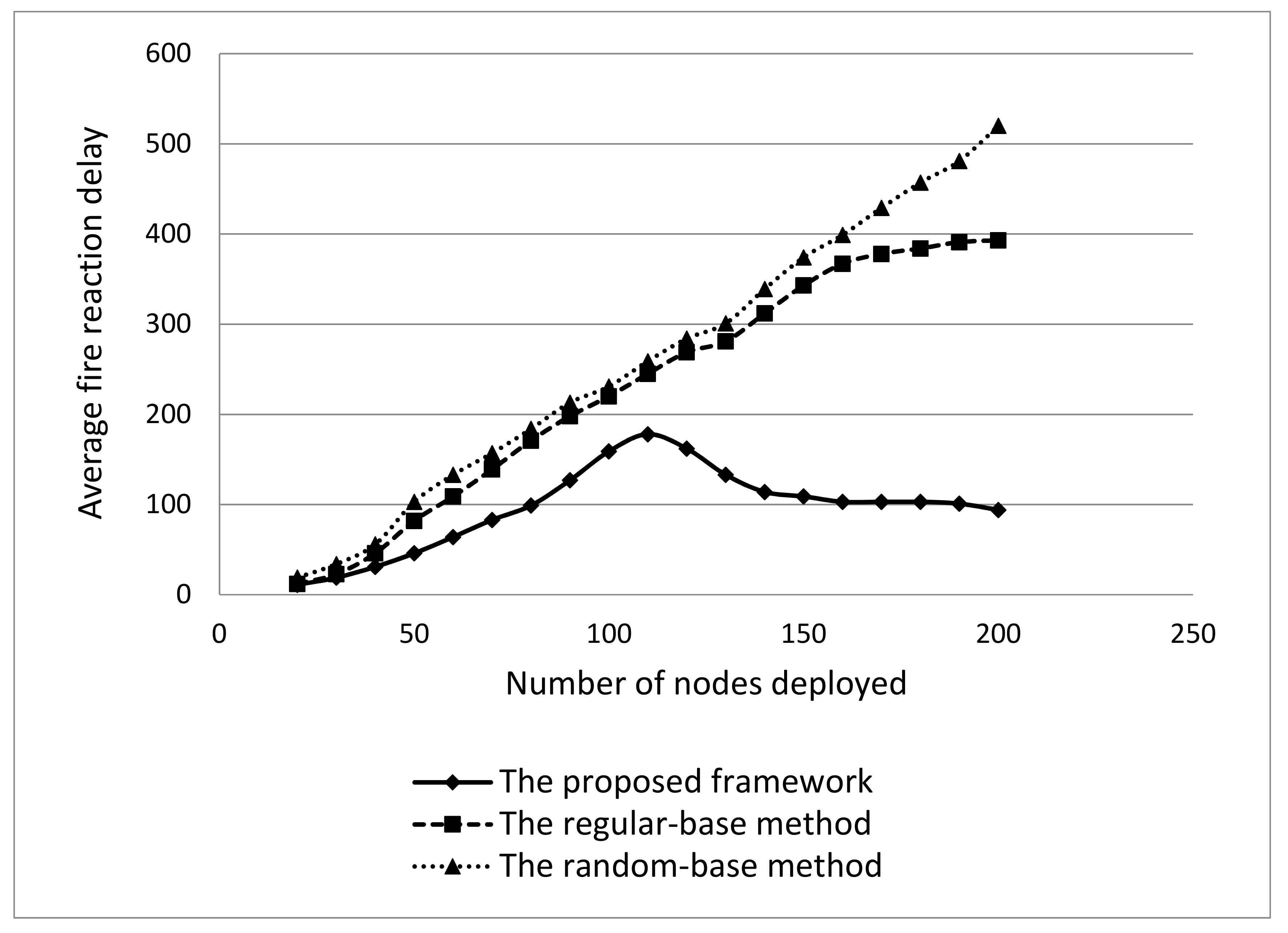
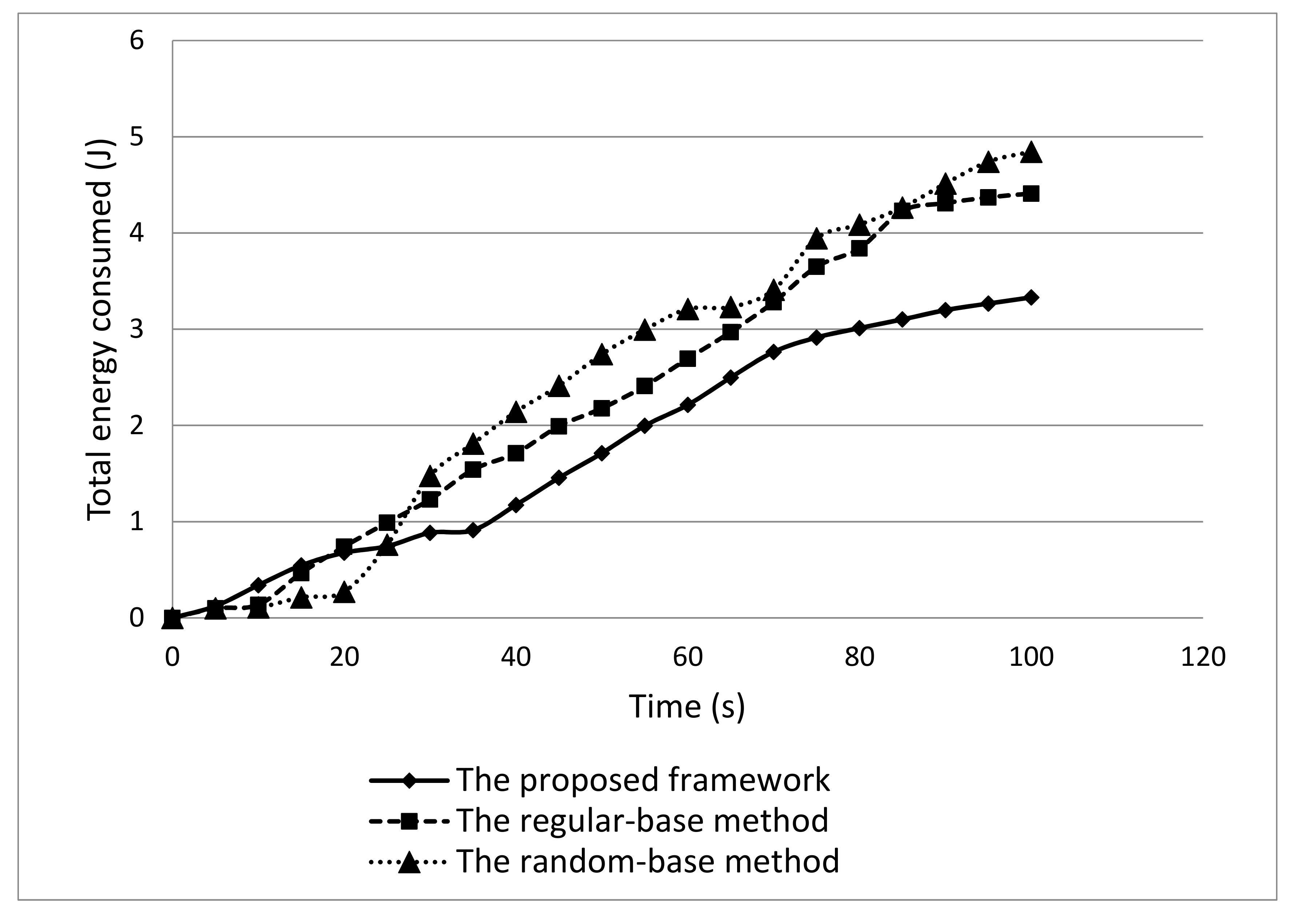
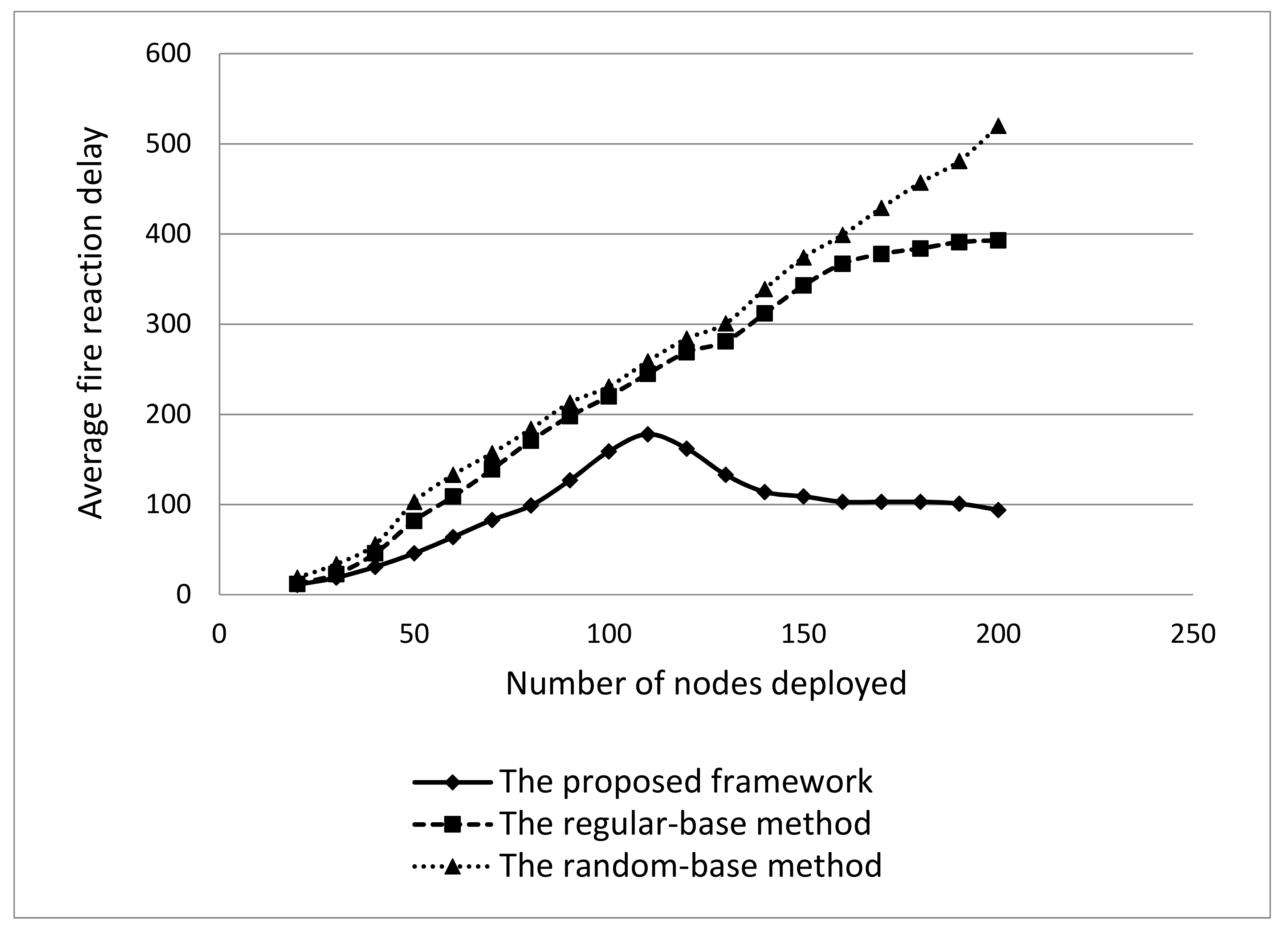
4.2.4. Performance Evaluation on the Proposed Overall Framework
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Botts, H.; Thomas, J.; Kolk, S.; McCabe, S.; Stueck, B.; Suhr, L. CoreLogic Wildfire Hazard Risk Report: Residential Wildfire Exposure Estimates for the Western United States; CoreLogic: Irvine, CA, USA, 2013. [Google Scholar]
- Ohdaira, T.; Endo, K.; Abe, N.; Yasuda, Y. Usefulness in notes of an intra-abdominal antifogging wireless charge-coupled device (ccd) camera with pantograph-type needle unit for placement to the intra-abdominal wall. Surg. Endos. 2010, 24, 198–209. [Google Scholar] [CrossRef] [PubMed]
- Schmitz, H.; Bleckmann, H. The photomechanic infrared receptor for the detection of forest fires in the beetle melanophila acuminata (coleoptera: Buprestidae). J. Comp. Physiol. A 1998, 182, 647–657. [Google Scholar] [CrossRef]
- Domenikiotis, C.; Loukas, A.; Dalezios, N.R. The use of noaa/avhrr satellite data for monitoring and assessment of forest fires and floods. Nat. Hazards Earth Syst. Sci. 2003, 3, 115–128. [Google Scholar] [CrossRef]
- Zhu, D.X.; Wang, X.D.; Wu, W.B. Research on the forest fire survey system based on wireless sensor network. Adv. Mater. Res. 2012, 518–523, 1597–1602. [Google Scholar] [CrossRef]
- Yuan, C.; Liu, Z.; Zhang, Y. UAV-based forest fire detection and tracking using image processing techniques. In Proceedings of the International Conference on Unmanned Aircraft Systems, Denver, CO, USA, 9–12 June 2015; pp. 639–643. [Google Scholar]
- Töreyin, B.U.; Dedeoğlu, Y.; Güdükbay, U.; Çetin, A.E. Computer vision based method for real-time fire and flame detection. Pattern Recognit. Lett. 2006, 27, 49–58. [Google Scholar] [CrossRef] [Green Version]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor network survey. Comput. Netw. Int. J. Comput. Telecommun. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Hefeeda, M.; Bagheri, M. Forest fire modeling and early detection using wireless sensor networks. Ad Hoc Sens. Wirel. Netw. 2009, 7, 169–224. [Google Scholar]
- Bahrepour, M.; Meratnia, N.; Havinga, P.J.M. Automatic Fire Detection: A Survey from Wireless Sensor Network Perspective; University of Twente Centre for Telematics & Information Technology: Enschede, The Netherlands, 2008. [Google Scholar]
- Aslan, Y.E.; Korpeoglu, I.; Ulusoy, Ö. A framework for use of wireless sensor networks in forest fire detection and monitoring. Comput. Environ. Urban Syst. 2012, 36, 614–625. [Google Scholar] [CrossRef] [Green Version]
- MODIS Web Page. Available online: http://MODIS.gsfc.nasa.gov (accessed on 17 October 2018).
- AVHRR Web Page. Available online: http://noaasis.noaa.gov/noaasis (accessed on 17 October 2018).
- Wang, C.; Guo, S.; Yang, Y. An optimization framework for mobile data collection in energy-harvesting wireless sensor networks. IEEE Trans. Mob. Comput. 2016, 15, 2969–2986. [Google Scholar] [CrossRef]
- Ahmadi, Y.; Neda, N.; Ghazizadeh, R. Range free localization in wireless sensor networks for homogeneous and non-homogeneous environment. IEEE Sens. J. 2016, 16, 8018–8026. [Google Scholar] [CrossRef]
- Lin, C.C.; Deng, D.J.; Chen, Z.Y.; Chen, K.C. Key design of driving industry 4.0: Joint energy-efficient deployment and scheduling in group-based industrial wireless sensor networks. IEEE Commun. Mag. 2016, 54, 46–52. [Google Scholar] [CrossRef]
- Ye, M.; Wang, Y.; Dai, C.; Wang, X. A hybrid genetic algorithm for the minimum exposure path problem of wireless sensor networks based on a numerical functional extreme model. IEEE Trans. Veh. Technol. 2015, 65, 8644–8657. [Google Scholar] [CrossRef]
- Guo, J.; Jafarkhani, H. Sensor deployment with limited communication range in homogeneous and heterogeneous wireless sensor networks. IEEE Trans. Wirel. Commun. 2016, 15, 6771–6784. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, Y. Energy-efficient cross-layer protocol of channel-aware geographic-informed forwarding in wireless sensor networks. IEEE Trans. Veh. Technol. 2009, 58, 3041–3052. [Google Scholar] [CrossRef]
- Son, B.; Her, Y.S. A design and implementation of forest-fires surveillance system based on wireless sensor networks for south korea mountains. Int. J. Comput. Sci. Netw. Secur. 2005, 6, 124–130. [Google Scholar]
- Ngai, E.; Zhou, Y.; Lyu, M.R.; Liu, J. A delay-aware reliable event reporting framework for wireless sensor–actuator networks. Ad Hoc Netw. 2010, 8, 694–707. [Google Scholar] [CrossRef]
- García, E.M.; Serna, M.Á.; Bermúdez, A.; Casado, R. Simulating a WSN-Based Wildfire Fighting Support System. In Proceedings of the IEEE International Symposium on Parallel and Distributed Processing with Applications, Sydney, NSW, Australia, 10–12 December 2008; pp. 896–902. [Google Scholar]
- Bahrepour, M.; Meratnia, N.; Havinga, P.J.M. Fast and accurate residential fire detection using wireless sensor networks. Environ. Eng. Manag. J. 2010, 9, 215–221. [Google Scholar] [CrossRef]
- Fernández-Berni, J.; Carmona-Galán, R.; Martínez-Carmona, J.F.; Rodríguez-Vázquez, Á. Early forest fire detection by vision-enabled wireless sensor networks. Int. J. Wildl. Fire 2012, 21, 938–949. [Google Scholar] [CrossRef]
- Khamukhin, A.A.; Bertoldo, S. Spectral analysis of forest fire noise for early detection using wireless sensor networks. In Proceedings of the 2016 International Siberian Conference on Control and Communications (SIBCON), Moscow, Russia, 12–14 May 2016; pp. 1–4. [Google Scholar]
- Losso, A.; Corgnati, L.; Bertoldo, S.; Allegretti, M.; Notarpietro, R.; Perona, G. SIRIO: An integrated forest fire monitoring, detection and decision support system—Performance and results of the installation in Sanremo (Italy). WIT Trans. Ecol. Environ. 2012, 158, 79–90. [Google Scholar]
- Doolin, D.M. Wireless Sensors for Wildfire Monitoring. Available online: http://spie.org/Publications/Proceedings/Paper/10.1117/12.605655 (accessed on 17 October 2018).
- Celik, T. Fast and efficient method for fire detection using image processing. ETRI J. 2010, 32, 881–890. [Google Scholar] [CrossRef]
- Washington State University. Department of Natural Resource Sciences. Available online: http://www.ruraltech.org/ (accessed on 17 October 2018).
- National Fire Danger Rating System (NFDRS). Available online: http://www.wrh.noaa.gov/sew/fire/olm/nfdrs.htm/ (accessed on 17 October 2018).
- Documentation Sent by the Meteorological Service of Canada [Obtained by Post, March 2010]. Available online: https://www.canada.ca/en/services/environment (accessed on 17 October 2018).
- FireLib Public Domain Software for the Wildland Fire Community. Available online: http://fire.org/ (accessed on 17 October 2018).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node ID | Alive | Sleep | Head | Active | Cluster |
|---|---|---|---|---|---|
| int | byte | byte | byte | byte | int |
| Parameters | Value |
|---|---|
| Number of node | 121 |
| Channel type | Channel/WirelessChannel |
| Radio propagation | Propagation/TwoRayGround |
| Physical type | Phy/WirelessPhy/802_15_4 |
| MAC type | Mac/802_15_4 |
| Interface queue type | Queue/DropTail/PriQueue |
| Link layer type | LL |
| Antenna pattern | Antenna/OmniAntenna |
| Frequency | 2.4 GHz |
| Interface queue length | 50 |
| Initial energy of node | 5J |
| Transmission Energy (TXE) | 1 mW |
| Receiving Energy (RXE) | 1 mW |
| CSThresh_ | 1.10765 × 10−11 Hz |
| RXThresh_ | 1.10765 × 10−11 Hz |
| Packet size | 70 bytes |
| Transport layer protocol | User Datagram Protocol (UDP) |
| Data traffic type | Constant Bit Rate (CBR) |
| The topology width | 1000 |
| The topology length | 1000 |
| Simulation duration | 100 s |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.-H.; Sun, Q.-Y.; Xiao, Y.-T. An Environmentally Aware Scheme of Wireless Sensor Networks for Forest Fire Monitoring and Detection. Future Internet 2018, 10, 102. https://doi.org/10.3390/fi10100102
Xu Y-H, Sun Q-Y, Xiao Y-T. An Environmentally Aware Scheme of Wireless Sensor Networks for Forest Fire Monitoring and Detection. Future Internet. 2018; 10(10):102. https://doi.org/10.3390/fi10100102
Chicago/Turabian StyleXu, Yi-Han, Qiu-Ya Sun, and Yu-Tong Xiao. 2018. "An Environmentally Aware Scheme of Wireless Sensor Networks for Forest Fire Monitoring and Detection" Future Internet 10, no. 10: 102. https://doi.org/10.3390/fi10100102
APA StyleXu, Y.-H., Sun, Q.-Y., & Xiao, Y.-T. (2018). An Environmentally Aware Scheme of Wireless Sensor Networks for Forest Fire Monitoring and Detection. Future Internet, 10(10), 102. https://doi.org/10.3390/fi10100102