

Global Navigation Satellite System/Inertial Navigation System-Based Autonomous Driving Control System for Forestry Forwarders

 and
and
Abstract
1. Introduction
2. Materials and Methods
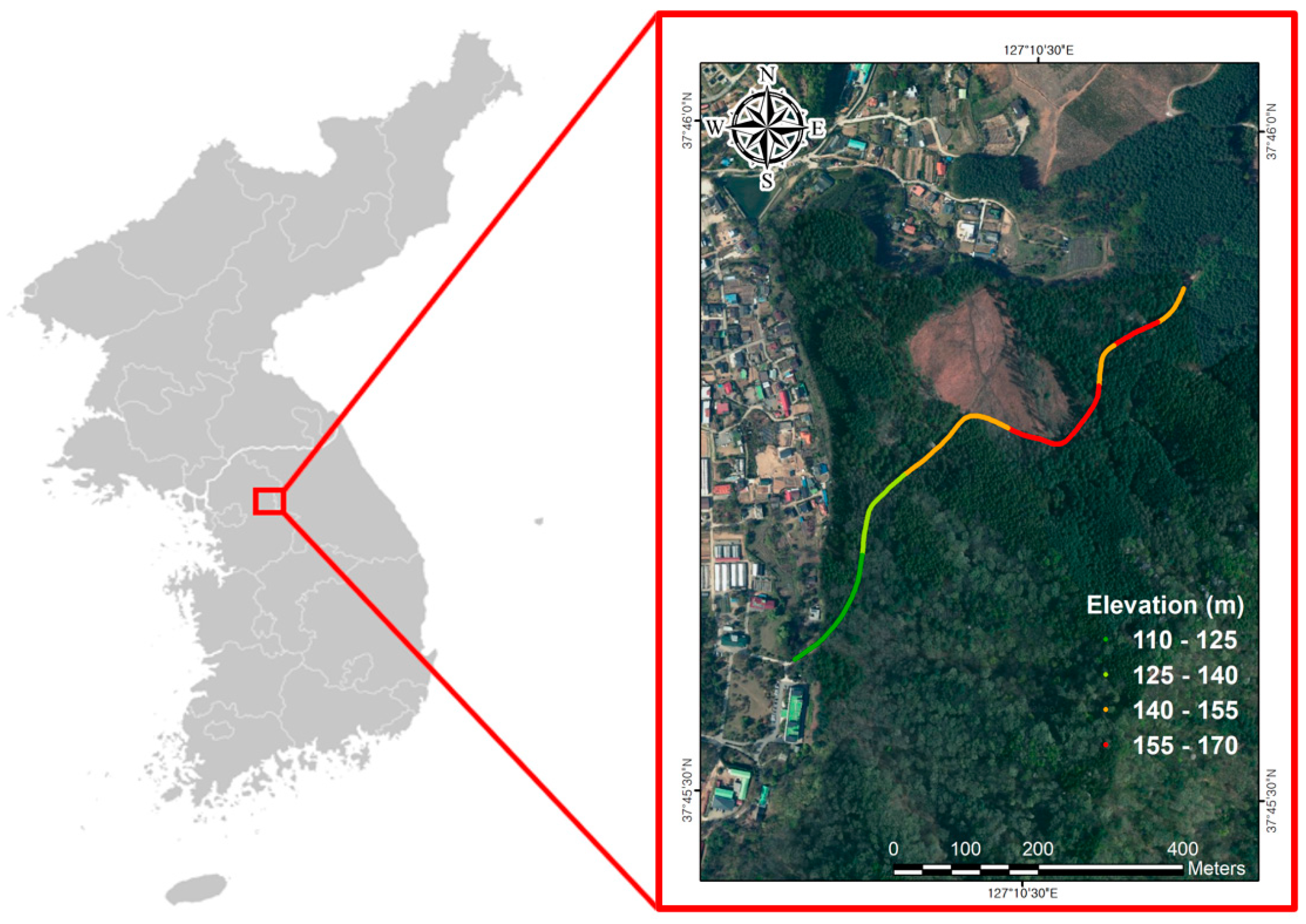
2.1. Experimental Site
2.2. Development of the Autonomous Driving Control System
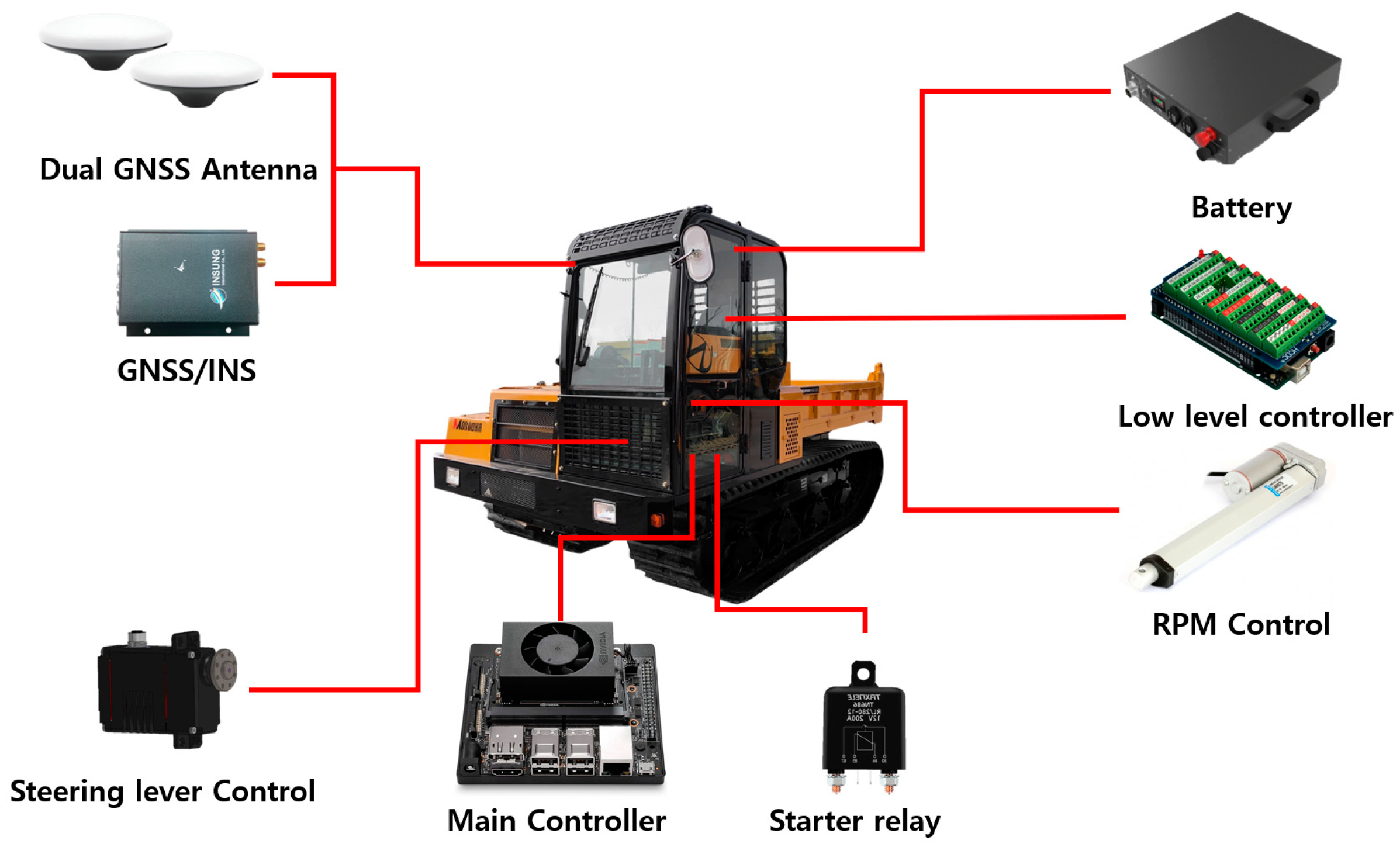
2.2.1. Overview of the Driving Control System
2.2.2. Tracked Forwarder (Reference Vehicle)
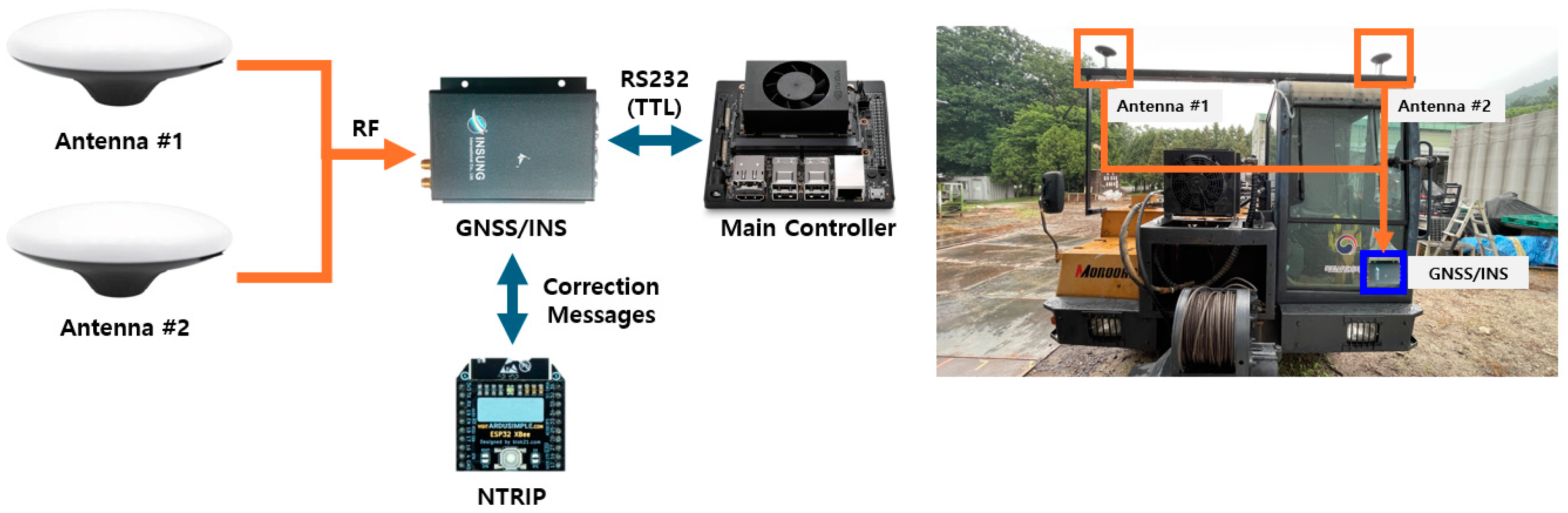
2.2.3. RTK GNSS/INS System for Autonomous Forwarder
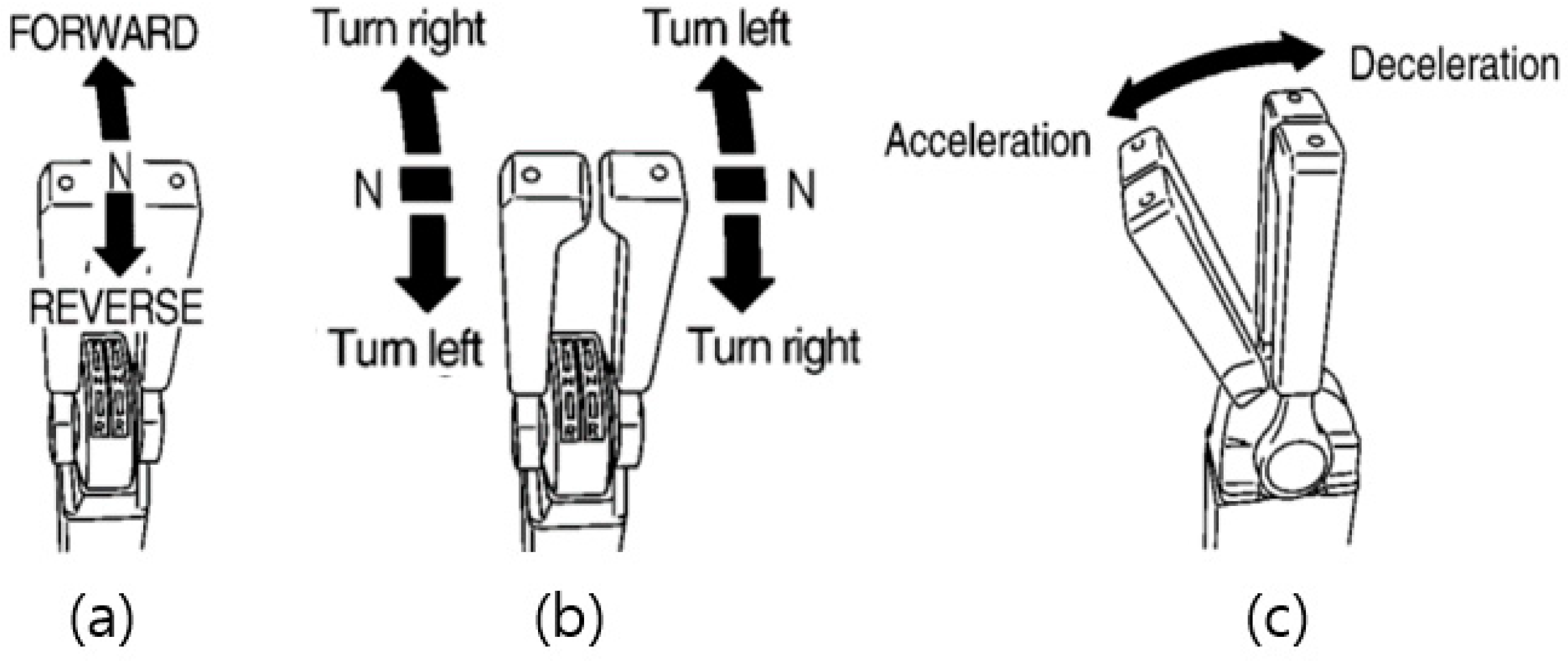
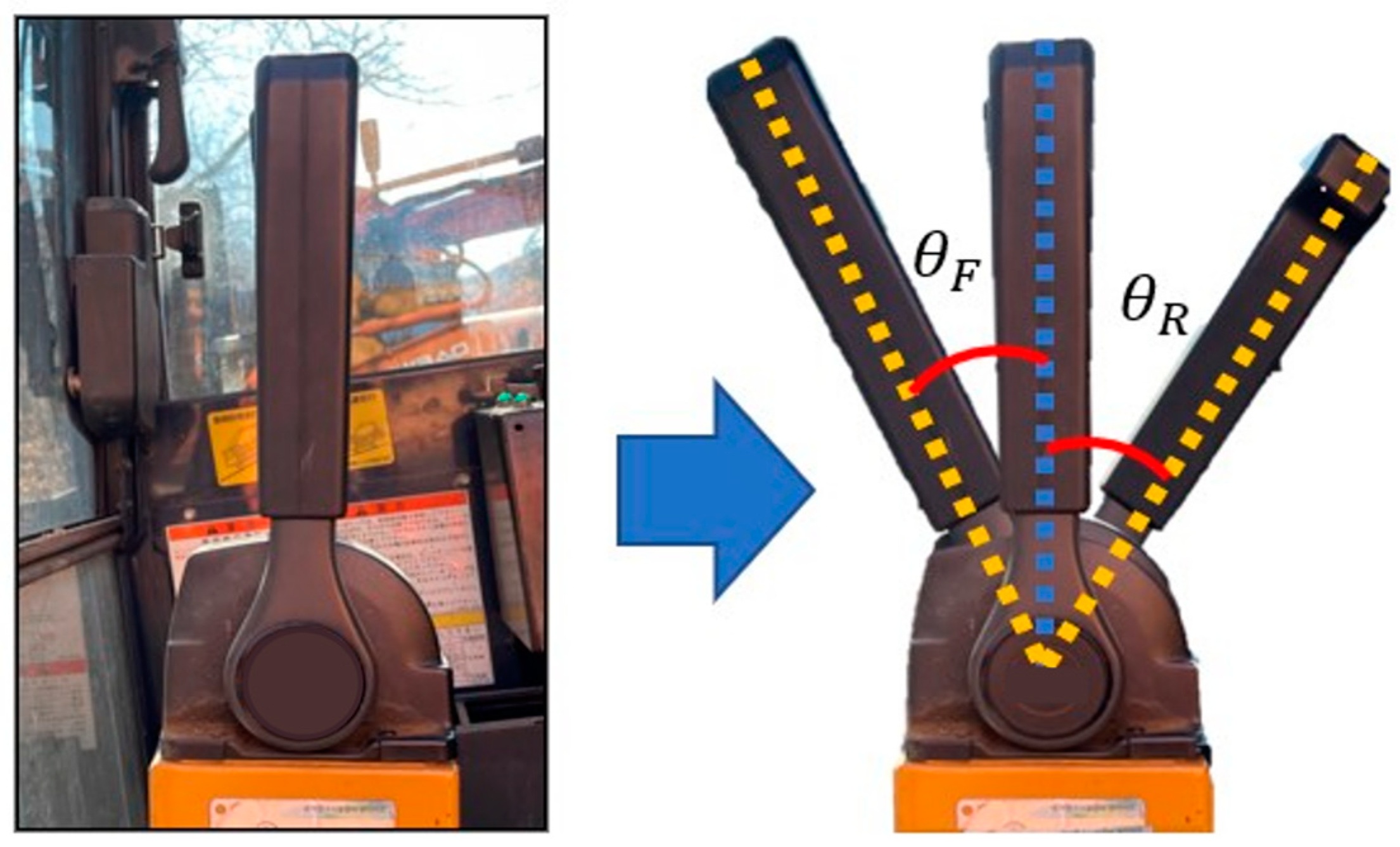
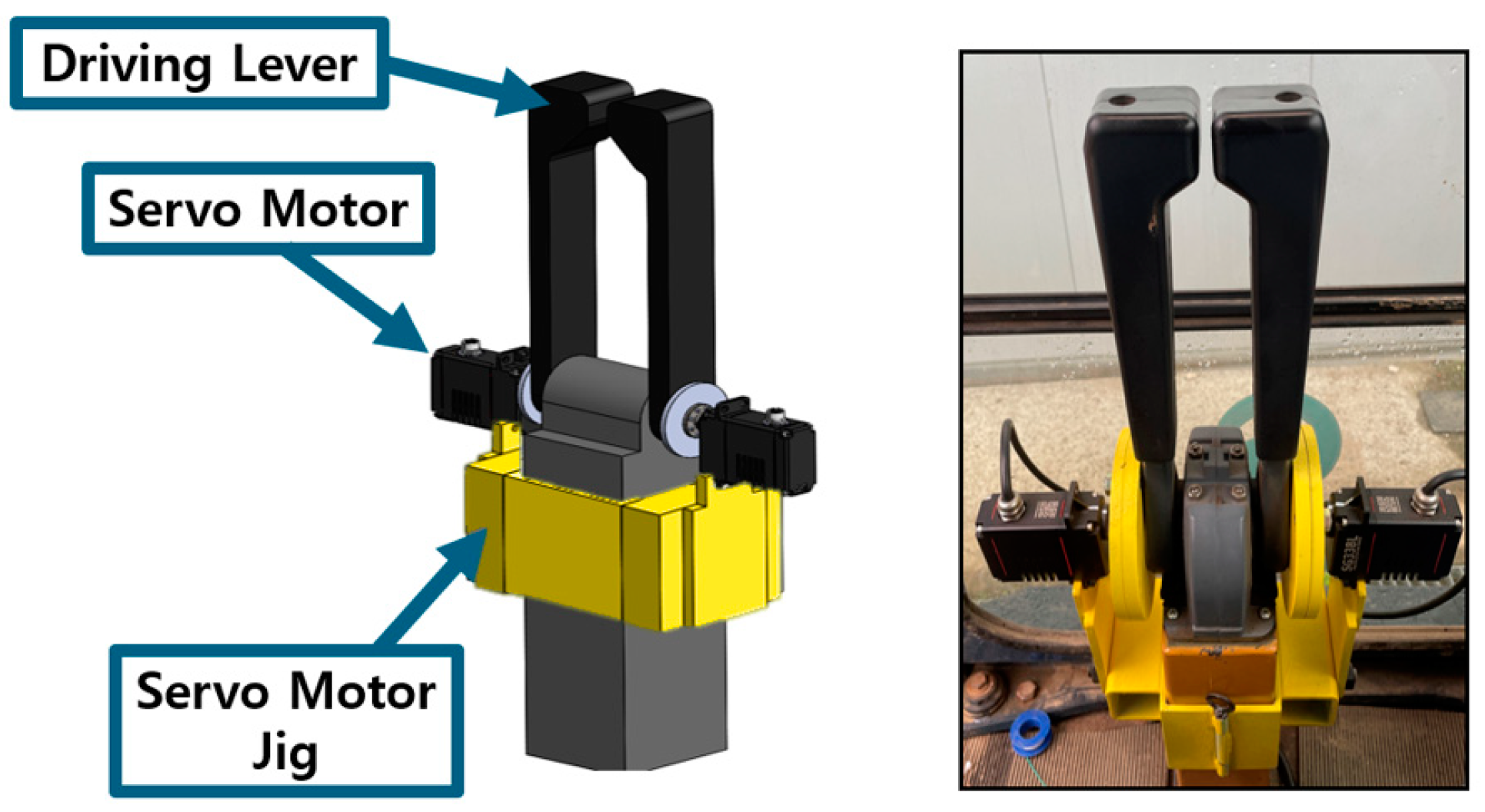
2.2.4. Control System for Driving Lever
2.3. Autonomous Driving Algorithm
2.3.1. Path Planning
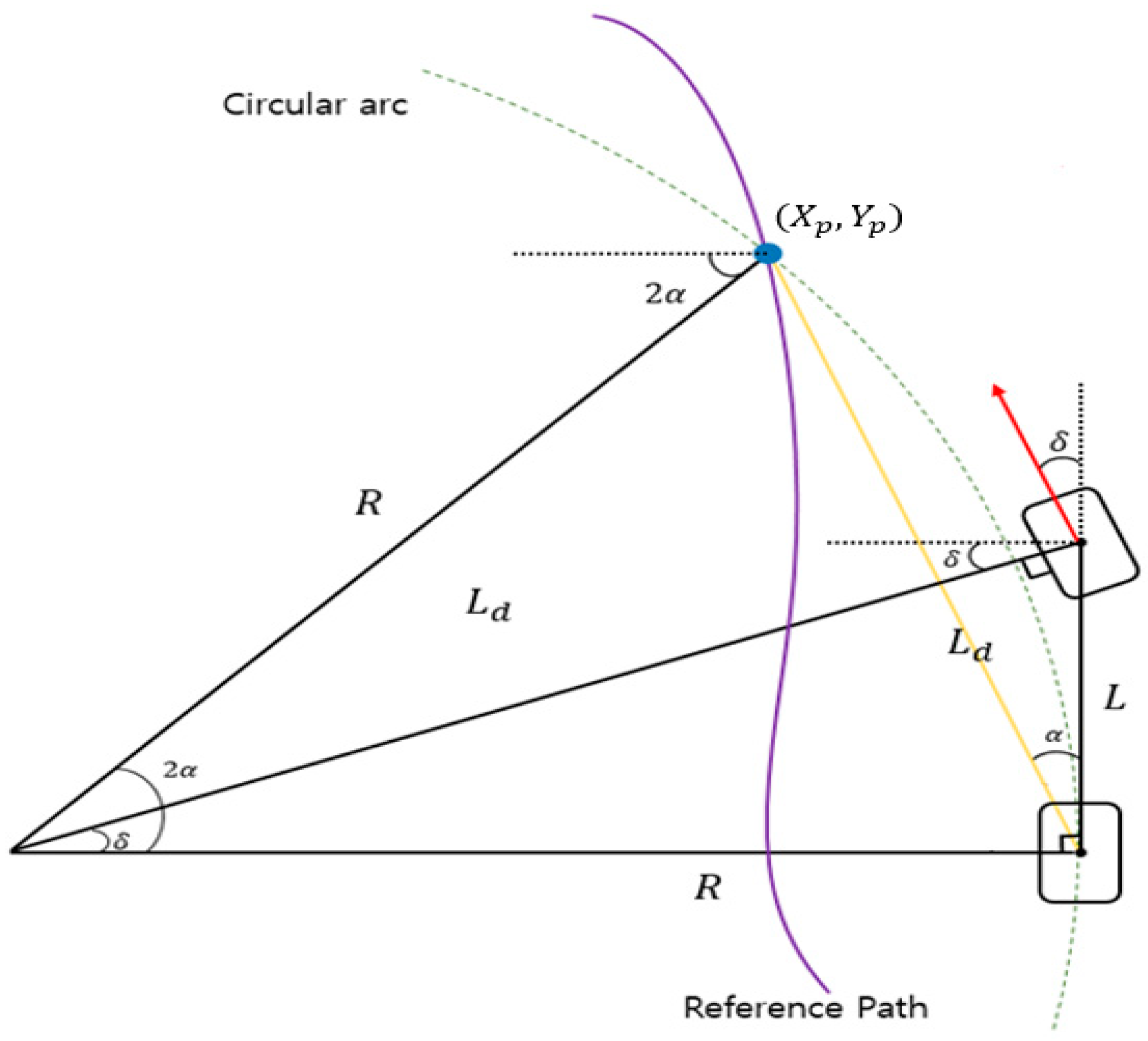
2.3.2. Path Tracking
2.3.3. Driving Error Correction and Emergency Stop
2.4. Performance Test of the Autonomous Forwarder
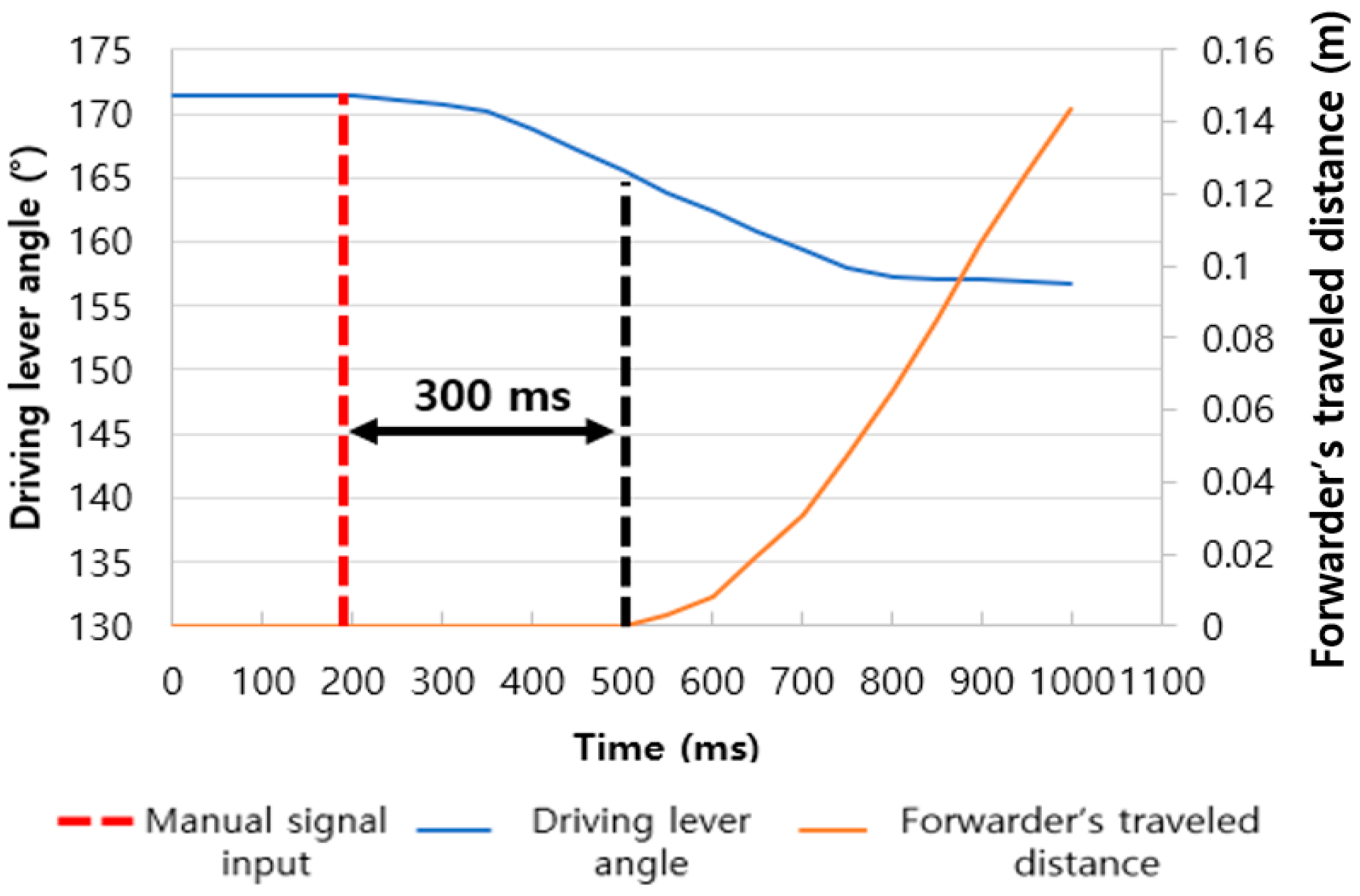
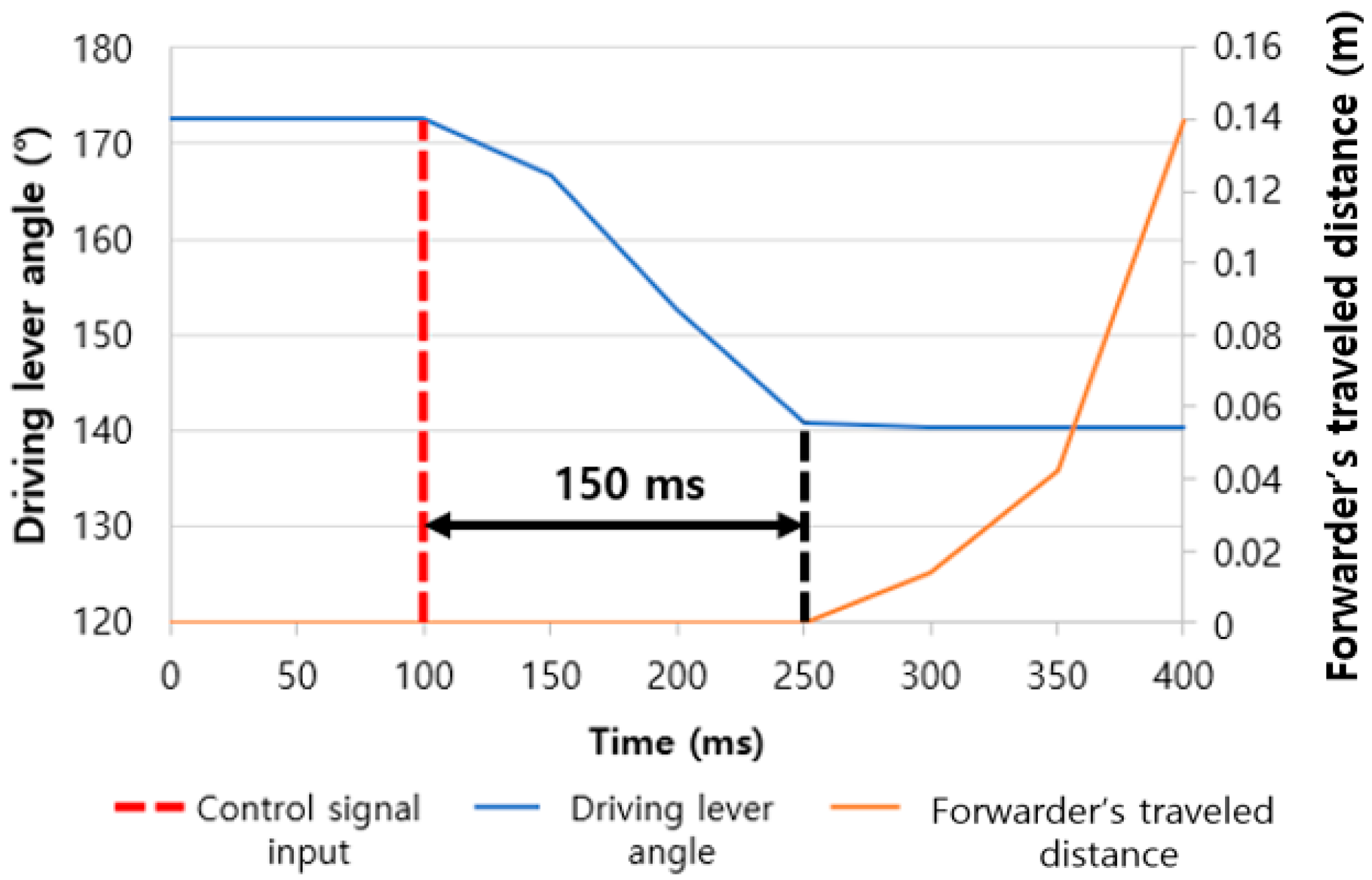
2.4.1. Steering Control Performance Test
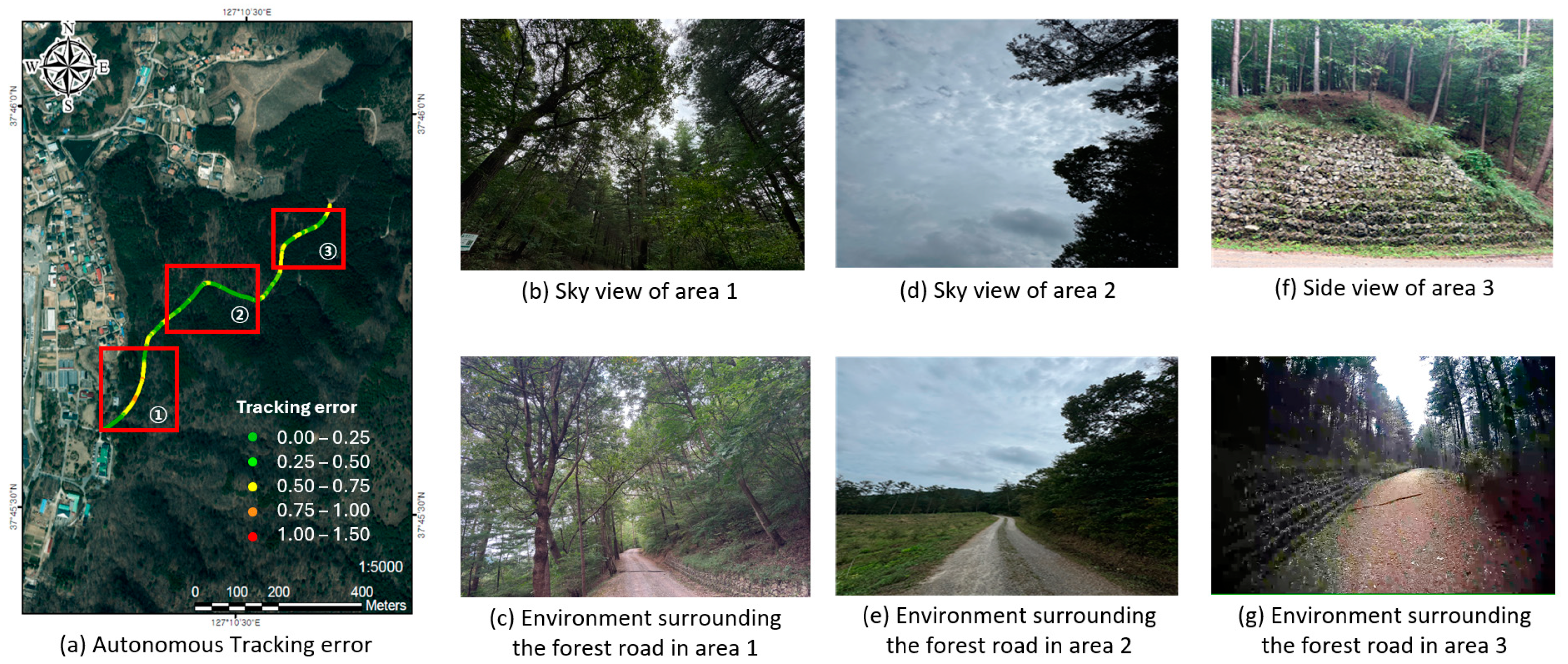
2.4.2. Driving Test
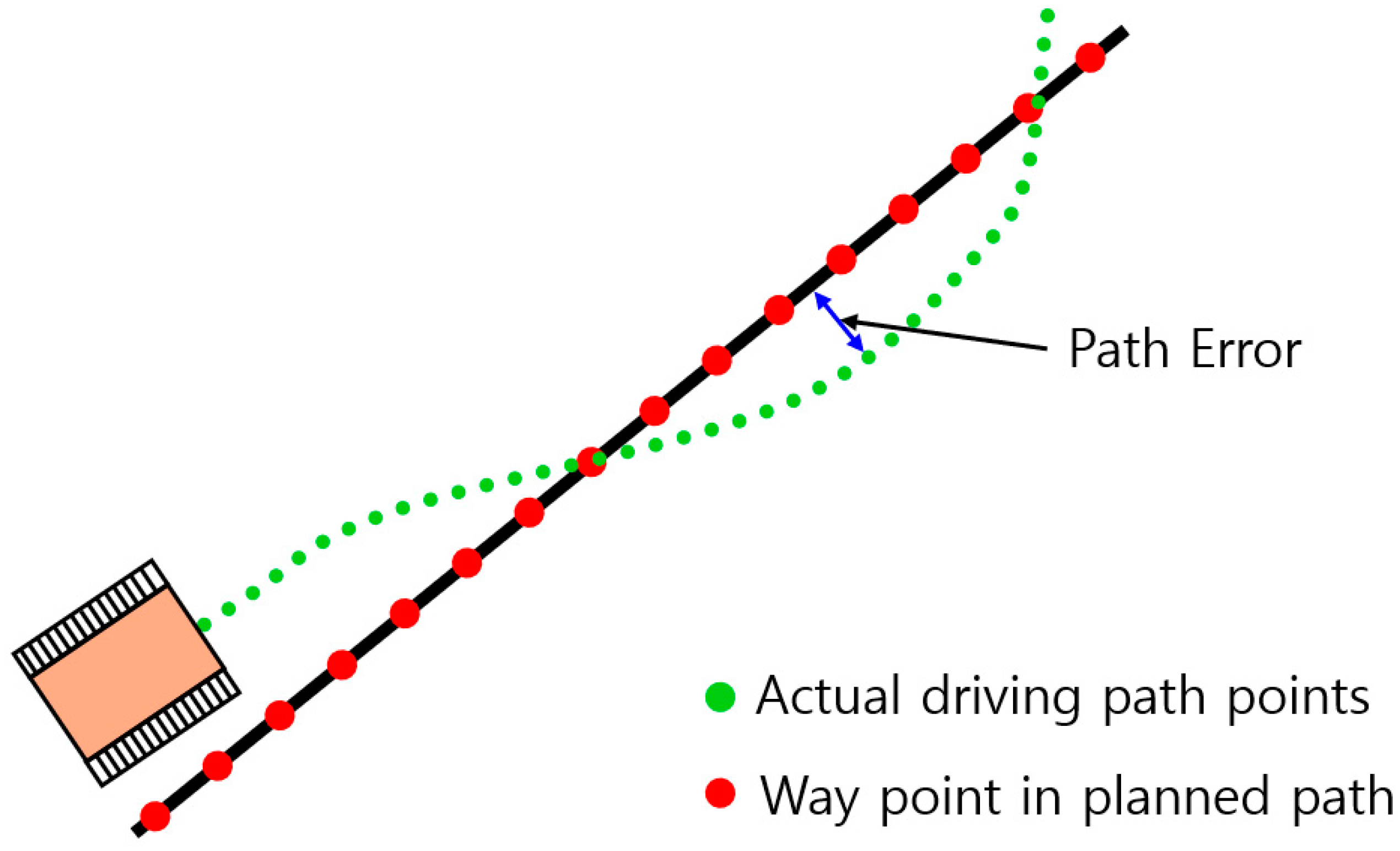
2.4.3. Autonomous Driving Error Calculation
3. Results
3.1. Steering Control Performance Evaluation
3.2. Autonomous Path-Generation Results
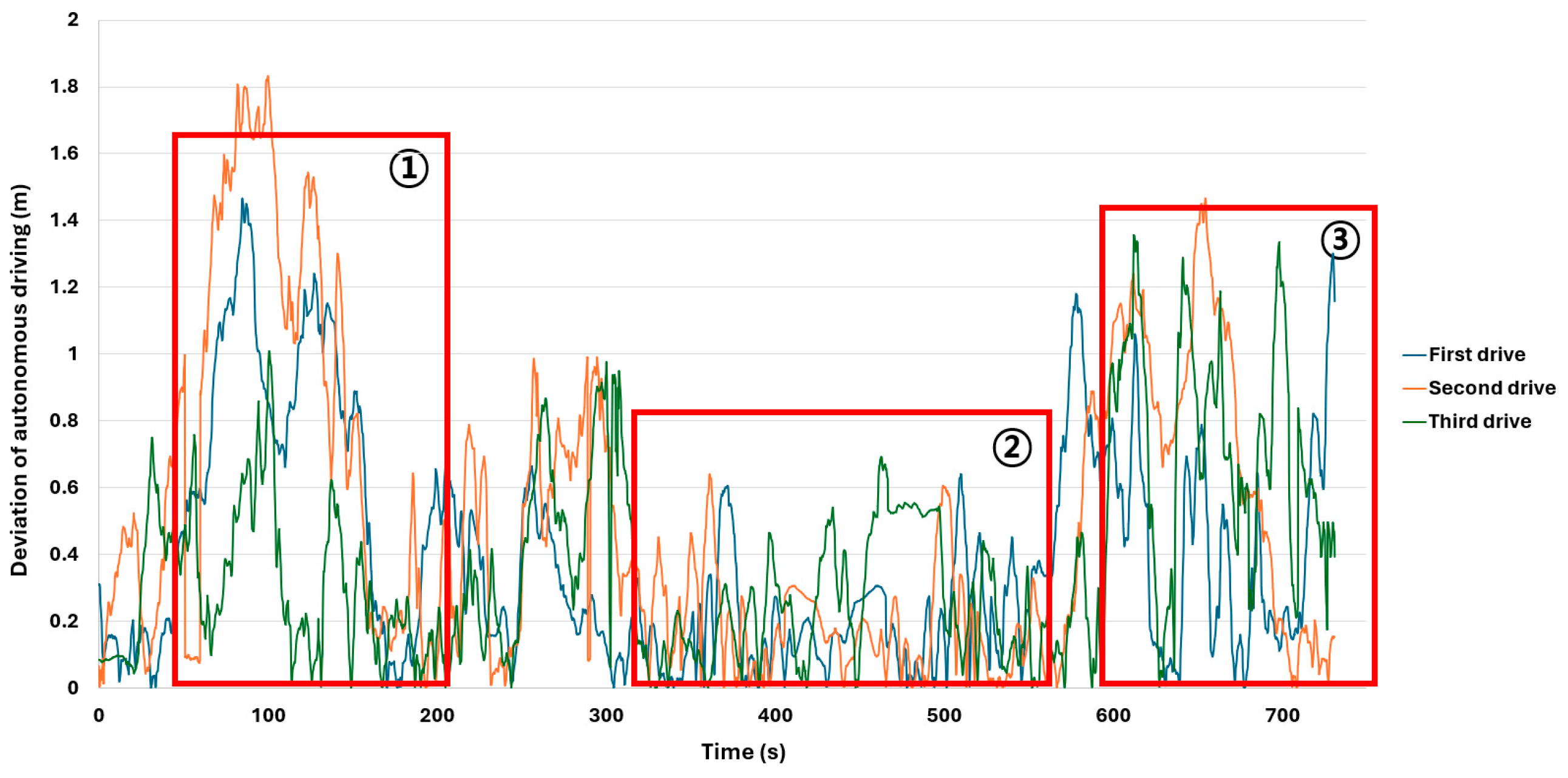
3.3. Autonomous Driving Path Error Results
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| GNSS | Global Navigation Satellite System |
| HST | hydrostatic transmission |
| INS | Inertial Navigation System |
| IP | internet protocol |
| LAD | look-ahead distance |
| LiDAR | light detection and ranging |
| NTRIP | networked transport of RTCM via IP |
| RTK | real-time kinematics |
| RMSE | root mean square error |
| RTCM | Radio Technical Commission for Maritime Services |
| SLAM | simultaneous localization and mapping |
References
- Marchi, E.; Chung, W.; Visser, R.; Abbas, D.; Nordfjell, T.; Mederski, P.S.; McEwan, A.; Brink, M.; Laschi, A. Sustainable Forest Operations (SFO): A New Paradigm in a Changing World and Climate. Sci. Total Environ. 2018, 634, 1385–1397. [Google Scholar] [CrossRef] [PubMed]
- Eom, C.-D.; Kim, M.-J.; Lee, C.-G. Analysis of Domestic Wood Resources Applicable for Wood Urbanism. In Proceedings of the 2021 Proceedings of Vitrtual Annual Korean Wood Science and Technology Conference, Online, 23–24 April 2021; p. 99. [Google Scholar]
- Kim, H.-Y.; Park, S.-H.; Lee, S.-H.; Park, C.-M. Analysis on Safety Accident Characteristics of Forestry Workers in Korea. J. Korean For. Soc. 2013, 102, 550–559. [Google Scholar] [CrossRef]
- Treanor, J.; Hartley, A.; Harvey, G.; May, B.; Bell, T. Design of a Prototype Autonomous Forestry Extraction Machine. Available online: https://ir.canterbury.ac.nz/items/5bf86030-c184-4067-a9d3-26262754e4f5.html (accessed on 23 January 2025).
- Bentley, T.A.; Parker, R.J.; Ashby, L. Understanding Felling Safety in the New Zealand Forest Industry. Appl. Ergon. 2005, 36, 165–175. [Google Scholar] [CrossRef] [PubMed]
- Cho, M.J.; Choi, Y.S.; Lee, E. Identifying Risk Factors and Evaluating Occupational Safety in South Korean Forestry Sector. Forests 2023, 14, 851. [Google Scholar] [CrossRef]
- Lundbäck, M. Roadmap for Teleoperation and Automation of Forwarding. Ph.D. Thesis, Umeå University, Umeå, Sweden, 2022. [Google Scholar]
- Müller, F.; Jaeger, D.; Hanewinkel, M. Digitization in Wood Supply—A Review on How Industry 4.0 Will Change the Forest Value Chain. Comput. Electron. Agric. 2019, 162, 206–218. [Google Scholar] [CrossRef]
- Han, J.H.; Park, C.H.; Kwon, J.H.; Lee, J.; Kim, T.S.; Jang, Y.Y. Performance Evaluation of Autonomous Driving Control Algorithm for a Crawler-Type Agricultural Vehicle Based on Low-Cost Multi-Sensor Fusion Positioning. Appl. Sci. 2020, 10, 4667. [Google Scholar] [CrossRef]
- Li, M.; Imou, K.; Wakabayashi, K.; Yokoyama, S. Review of Research on Agricultural Vehicle Autonomous Guidance. Int. J. Agric. Biol. Eng. 2009, 2, 1–16. [Google Scholar] [CrossRef]
- Kim, H.; Gong, S.; Rhee, J.; Lim, J.-G.; Kim, W.-S. Technological Trends of Intelligent Agricultural Machinery. J. Drive Control 2023, 20, 80–91. [Google Scholar] [CrossRef]
- Katupitiya, J.; Eaton, R. Precision Autonomous Guidance of Agricultural Vehicles for Future Autonomous Farming. In Proceedings of the American Society of Agricultural and Biological Engineers Annual International Meeting 2008, Providence, RI, USA, 29 June–2 July 2008; ASABE 2008. Volume 10, pp. 1–6. [Google Scholar] [CrossRef]
- Leidenfrost, H.T.; Tate, T.T.; Canning, J.R.; Anderson, M.J.; Soule, T.; Edwards, D.B.; Frenzel, J.F. Autonomous Navigation of Forest Trails by an Industrial-Size Robot. Trans. ASABE 2013, 56, 1273–1290. [Google Scholar] [CrossRef]
- Krulikowski Rodrigues, C.; da Silva Lopes, E.; Figueiredo Filho, A.; Kaminski Cândido da Silva, M. Modeling Of Forwarder Productivity and Costs in Thinned Pine Stands. Floresta 2017, 48, 285–292. [Google Scholar] [CrossRef]
- Ringdahl, O. Automation in Forestry Development of Unmanned Forwarders. Ph.D. Thesis, Umeå University, Umeå, Sweden, 2011. [Google Scholar]
- Choi, Y.-S.; Cho, M.-J.; Mun, H.-S.; Kim, D.-H.; Cha, D.-S.; Han, S.-K.; Oh, J.-H. Analysis on Yarding Productivity and Cost of Tower-Yarder Based on Excavator Using Radio-Controlled Double Clamp Carriage. J. Korean For. Soc. 2018, 107, 266–277. [Google Scholar] [CrossRef]
- Hibiya, R. LiDAR-Based Accessibility Mapping of Forest Operation Machines in Steep Terrain. Master’s Thesis, University of Eastern Finland, Kuopio, Finland, 2021. [Google Scholar]
- Visser, R.; Obi, O.F. Automation and Robotics in Forest Harvesting Operations. Croat. J. For. Eng. 2021, 42, 13–24. [Google Scholar] [CrossRef]
- Pereira, T.; Gameiro, T.; Viegas, C.; Santos, V.; Ferreira, N. Sensor Integration in a Forestry Machine. Sensors 2023, 23, 9853. [Google Scholar] [CrossRef] [PubMed]
- La Hera, P.; Mendoza-Trejo, O.; Lindroos, O.; Lideskog, H.; Lindbäck, T.; Latif, S.; Li, S.; Karlberg, M. Exploring the Feasibility of Autonomous Forestry Operations: Results from the First Experimental Unmanned Machine. J. Field Robot. 2024, 41, 942–965. [Google Scholar] [CrossRef]
- Nakagomi, H.; Fuse, Y.; Nagata, Y.; Hosaka, H.; Miyamoto, H.; Yokozuka, M.; Kamimura, A.; Watanabe, H.; Tanzawa, T.; Kotani, S. Forest Road Surface Detection Using LiDAR-SLAM and U-Net. In Proceedings of the 2021 IEEE/SICE International Symposium on System Integration, Iwaki, Japan, 11–14 January 2021; pp. 727–732. [Google Scholar]
- Seo, I.; Seo, D.; Kim, K. Development of Working Path Formation Program for Autonomous Tractor System. J. Agric. Sci. 2010, 37, 113–121. [Google Scholar]
- Hellström, T.; Ringdahl, O. Follow the Past: A Path-Tracking Algorithm for Autonomous Vehicles. Int. J. Veh. Auton. Syst. 2006, 4, 216–224. [Google Scholar] [CrossRef]
- Coulter, R.C. Implementation of the Pure Pursuit Path Tracking; Technical Report; Robotics Institute, Carnegie Mellon University: Pittsburgh, PA, USA, 1992. [Google Scholar]
- Abdi, O.; Uusitalo, J.; Pietarinen, J.; Lajunen, A. Evaluation of Forest Features Determining GNSS Positioning Accuracy of a Novel Low-Cost, Mobile RTK System Using LiDAR and TreeNet. Remote Sens. 2022, 14, 2856. [Google Scholar] [CrossRef]
- Matsuzaki, Y.; Kondo, Y.; Kishi, Y.; Esumi, J.; Yoshimura, T. Accuracy Assessment of Real-Time Kinematic Using a Low-Cost Dual-Frequency GNSS Receiver in a Sugi (Cryptomeria Japonica) Plantation Forest. J. Jpn. For. Eng. Soc. 2022, 37, 183–192. [Google Scholar] [CrossRef]
- Andreas, H.; Zainal Abidin, H.; Anggreni Sarsito, D.; Pradipta, D. Study the Capabilities of RTK Multi GNSS under Forest Canopy in Regions of Indonesia. In Proceedings of the E3S Web of Conferences, St. Petersburg, Russia, 19–20 November 2019; EDP Sciences: Les Ulis, France, 2019; Volume 94. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Vastaranta, M.; Kukko, A.; Jaakkola, A.; Yu, X.; Pyörälä, J.; Liang, X.; Liu, J.; Wang, Y.; et al. Accuracy of Kinematic Positioning Using Global Satellite Navigation Systems under Forest Canopies. Forests 2015, 6, 3218–3236. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification | Specification |
|---|---|
| Slope (°) | 15–20 |
| Elevation (m) | 110–170 |
| Tree species | Pinus koraiensis, Pinus rigida, Larix kaempferi |
| Stand type | Artificial forest |
| 381 | |
| Height (m) | 20–25 |
| Items | Specification | |
|---|---|---|
| Engine | Type | Water-cooled 4-cycle direct injection with turbocharger |
| Rated Power/RPM | 114HP/2800 | |
| Displacement | 3910 cc | |
| Transmission | Type | HST |
| Max Hydraulic Pressure | 335 kg/cm2 | |
| Brake | Type | Hydraulic actuated mechanical brake |
| Operating Weight | Weight of machine | 6400 kg |
| Max payload | 4300 kg | |
| Dimensions | Full length | 5416 mm |
| Full width | 2300 mm | |
| Wheelbase | 3130 mm | |
| Climbing angle | Maximum climbing angle | 30° |
| Items | Specification |
|---|---|
| Frequency | L1, L2, G1, G2, B1, B2, E1, E5b, QZSS, SBAS |
| Peak gain | 5 dBi |
| Azimuth coverage | 360° |
| IP rating | IP66 |
| Items | Specification |
|---|---|
| Power supply | 3.0–3.6 V |
| WiFi protocols | 802.11 b/g/n |
| Peripheral bus | UART/SPI/I2C |
| Network protocols | IPv4, TCP/UDP/HTTP/FTP |
| Central processing unit clock speed | 160 MHz |
| Processor | Xtensa Dual-core 32-bit LX6 microprocessor |
| Items | Specification | |
|---|---|---|
| Primary RF | L1, L2, E1, E5b, B1, B2 | |
| Secondary RF | L1, L2, E1, E5b, B1, B2 | |
| Position accuracy | Single | 1.5 m |
| RTK | 1 cm + 1 ppm | |
| Yaw accuracy | 0.5° | |
| Velocity accuracy | 0.04 m/s | |
| INS positioning error | 0.3 m | |
| Output interfaces | 3 UART 1 USB 2.0 2 SPI 1 CAN bus | |
| Items | Specification |
|---|---|
| Motor type | BLDC |
| Gear type | Metal |
| Potentiometer | Magnetic encoder |
| Operating voltage | 18–32 V |
| Stall current | 10 A |
| Max Speed | 0.19 s/60° |
| Stall torque | 14.42 N·m at 12 V |
| Protocol | CAN, DroneCAN, UAVCAN |
| IP rating | IP68 |
| Items | Specification | |
|---|---|---|
| Primary RF | L1 C/A, L1C, L2C, L2P, L5, L2 C/A, L2P, L3, L5, B1l, B1C, B2a, B2b, B2l, E1, E5, AltBOC, E5a, E5b | |
| Secondary RF | L1 C/A, L1C, L2C, L2P, L5, L2 C/A, L2P, L3, L5, B1l, B1C, B2a, B2b, B2l, E1, E5, AltBOC, E5a, E5b | |
| Position accuracy | Single L1/L2 | 1.3 m |
| RTK | 1 cm + 1 ppm | |
| Heading accuracy (base line 2 m) | 0.08° | |
| Velocity accuracy | 0.03 m/s | |
| Output interfaces | 3 UART 1 Wi-Fi 2 USB 1 CAN bus 1 Ethernet | |
| Test Run | Max. Deviation (m) | Std. Deviation(m) | RMSE (m) | ||||
|---|---|---|---|---|---|---|---|
| Area ① | Area ② | Area ③ | Area ① | Area ② | Area ③ | ||
| First | 1.465 | 0.724 | 1.300 | 0.424 | 0.151 | 0.331 | 0.389 |
| Second | 1.832 | 0.754 | 1.465 | 0.581 | 0.155 | 0.412 | 0.395 |
| Third | 1.008 | 0.976 | 1.355 | 0.221 | 0.207 | 0.354 | 0.393 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.-S.; Kim, G.-H.; Ju, H.-S.; Mun, H.-S.; Oh, J.-H.; Shin, B.-S. Global Navigation Satellite System/Inertial Navigation System-Based Autonomous Driving Control System for Forestry Forwarders. Forests 2025, 16, 647. https://doi.org/10.3390/f16040647
Lee H-S, Kim G-H, Ju H-S, Mun H-S, Oh J-H, Shin B-S. Global Navigation Satellite System/Inertial Navigation System-Based Autonomous Driving Control System for Forestry Forwarders. Forests. 2025; 16(4):647. https://doi.org/10.3390/f16040647
Chicago/Turabian StyleLee, Hyeon-Seung, Gyun-Hyung Kim, Hong-Sik Ju, Ho-Seong Mun, Jae-Heun Oh, and Beom-Soo Shin. 2025. "Global Navigation Satellite System/Inertial Navigation System-Based Autonomous Driving Control System for Forestry Forwarders" Forests 16, no. 4: 647. https://doi.org/10.3390/f16040647
APA StyleLee, H.-S., Kim, G.-H., Ju, H.-S., Mun, H.-S., Oh, J.-H., & Shin, B.-S. (2025). Global Navigation Satellite System/Inertial Navigation System-Based Autonomous Driving Control System for Forestry Forwarders. Forests, 16(4), 647. https://doi.org/10.3390/f16040647