
Data Fusion Modeling for an RT3102 and Dewetron System Application in Hybrid Vehicle Stability Testing

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Experiment Equipment
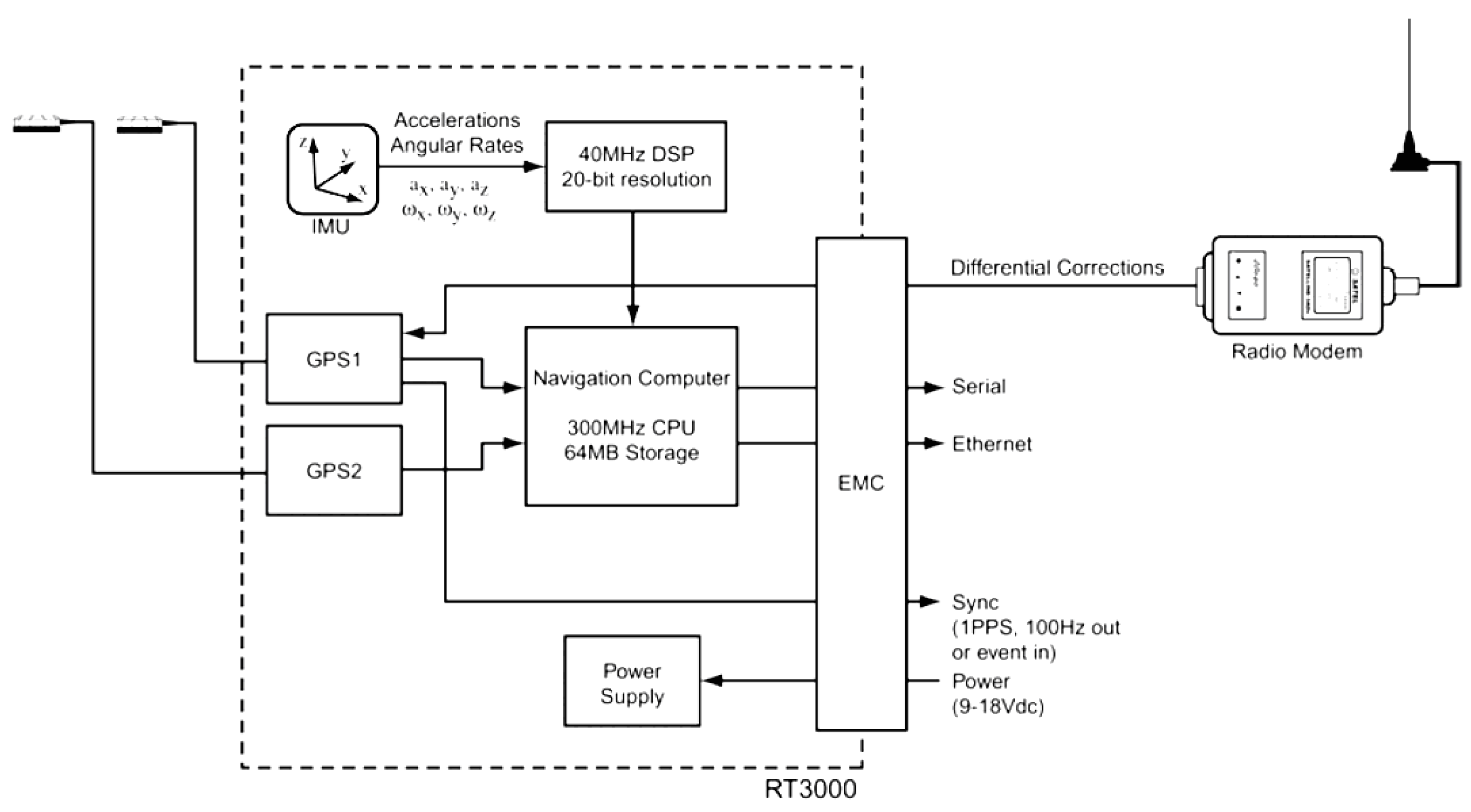
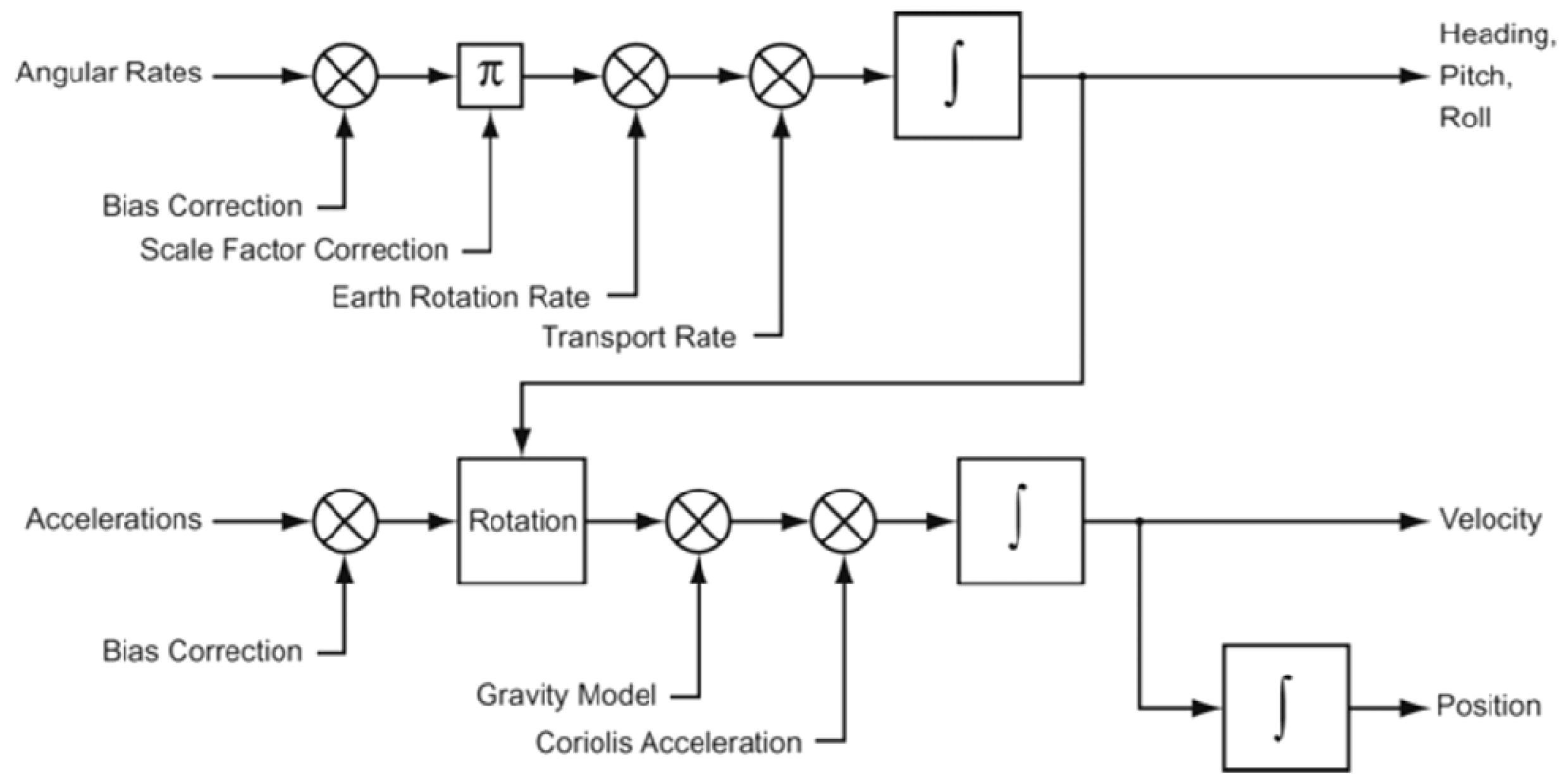
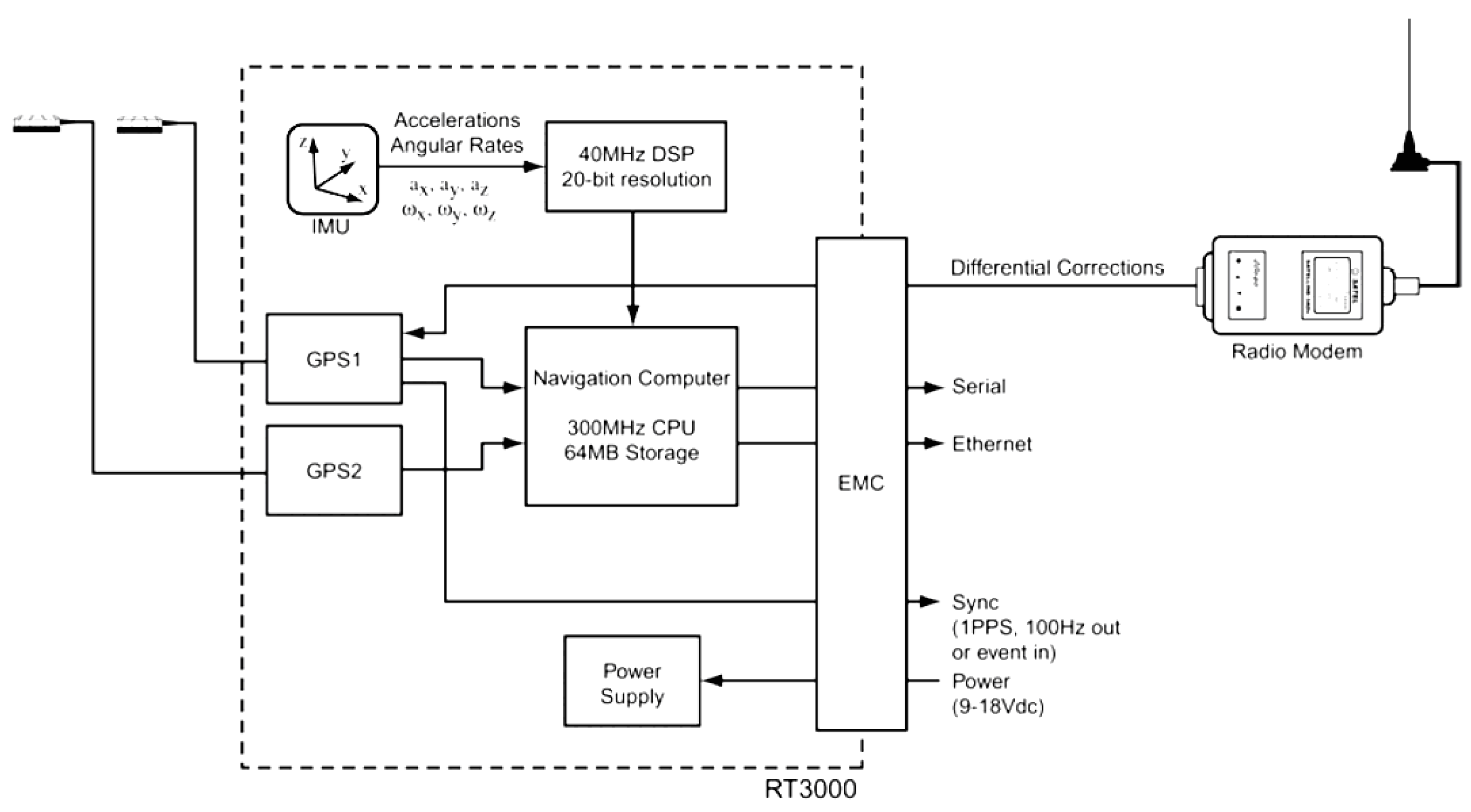
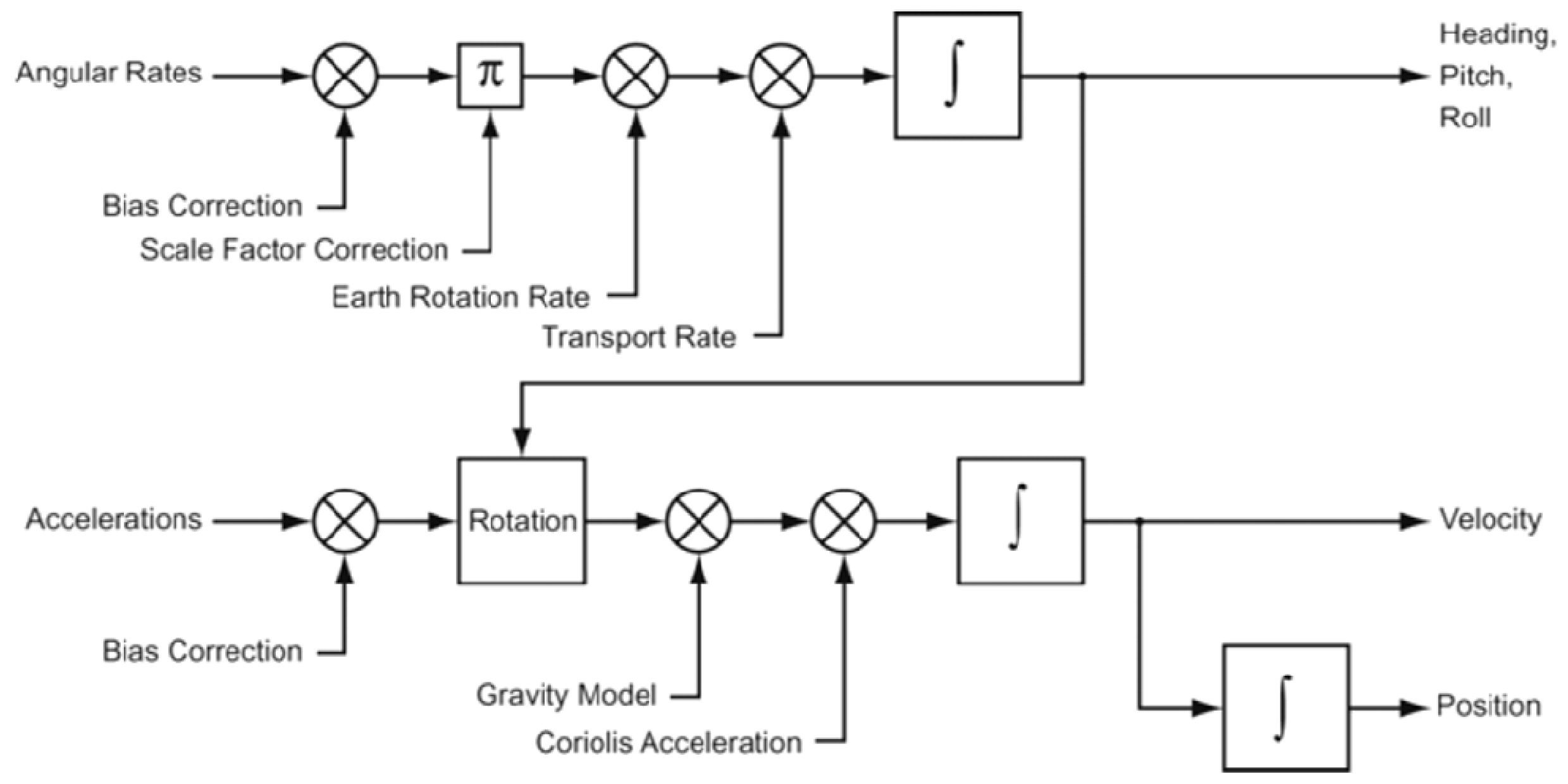
2.1. RT Navigation System

2.2. Dewetron System


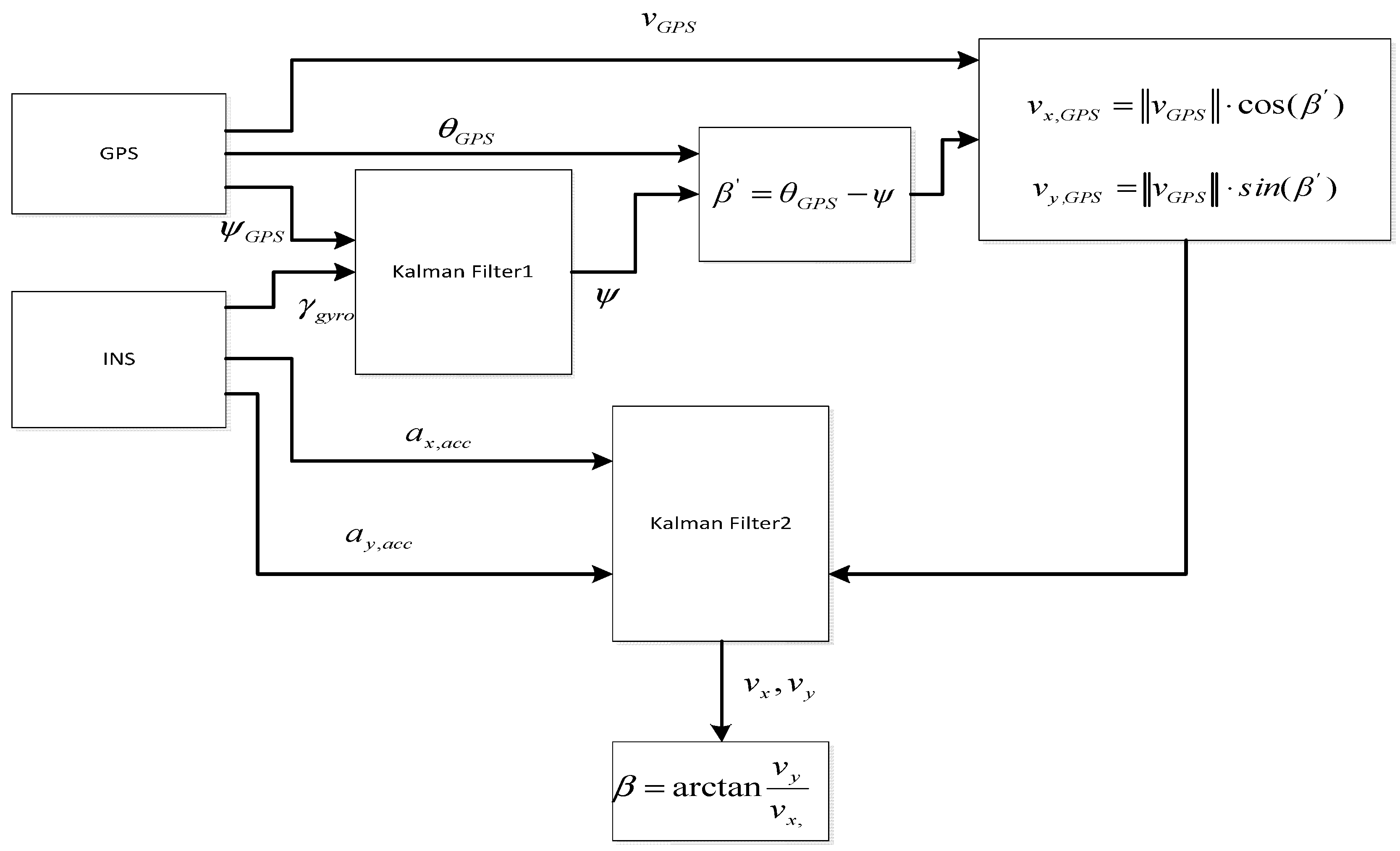
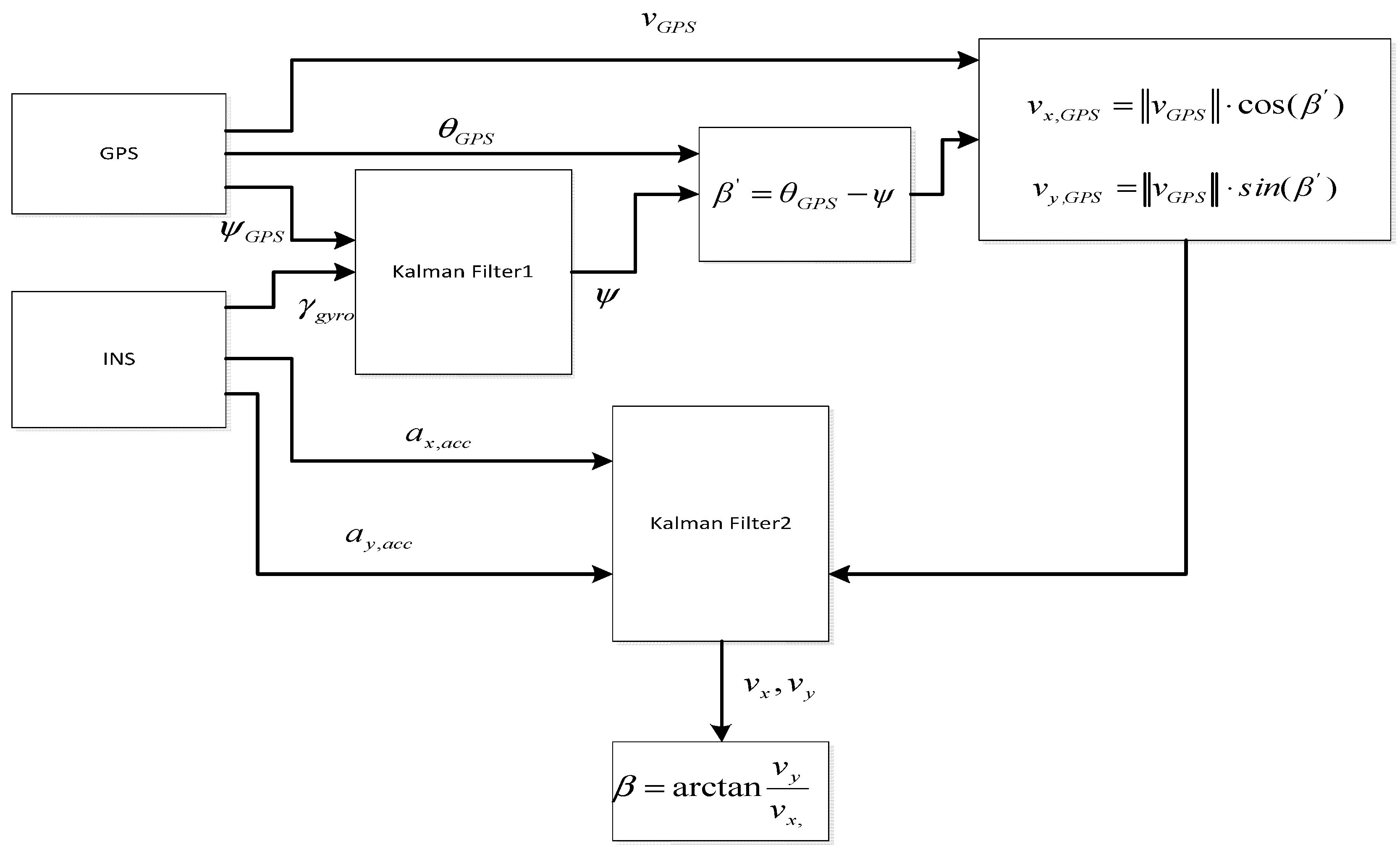
3. Modeling of Data Fusion Algorithm
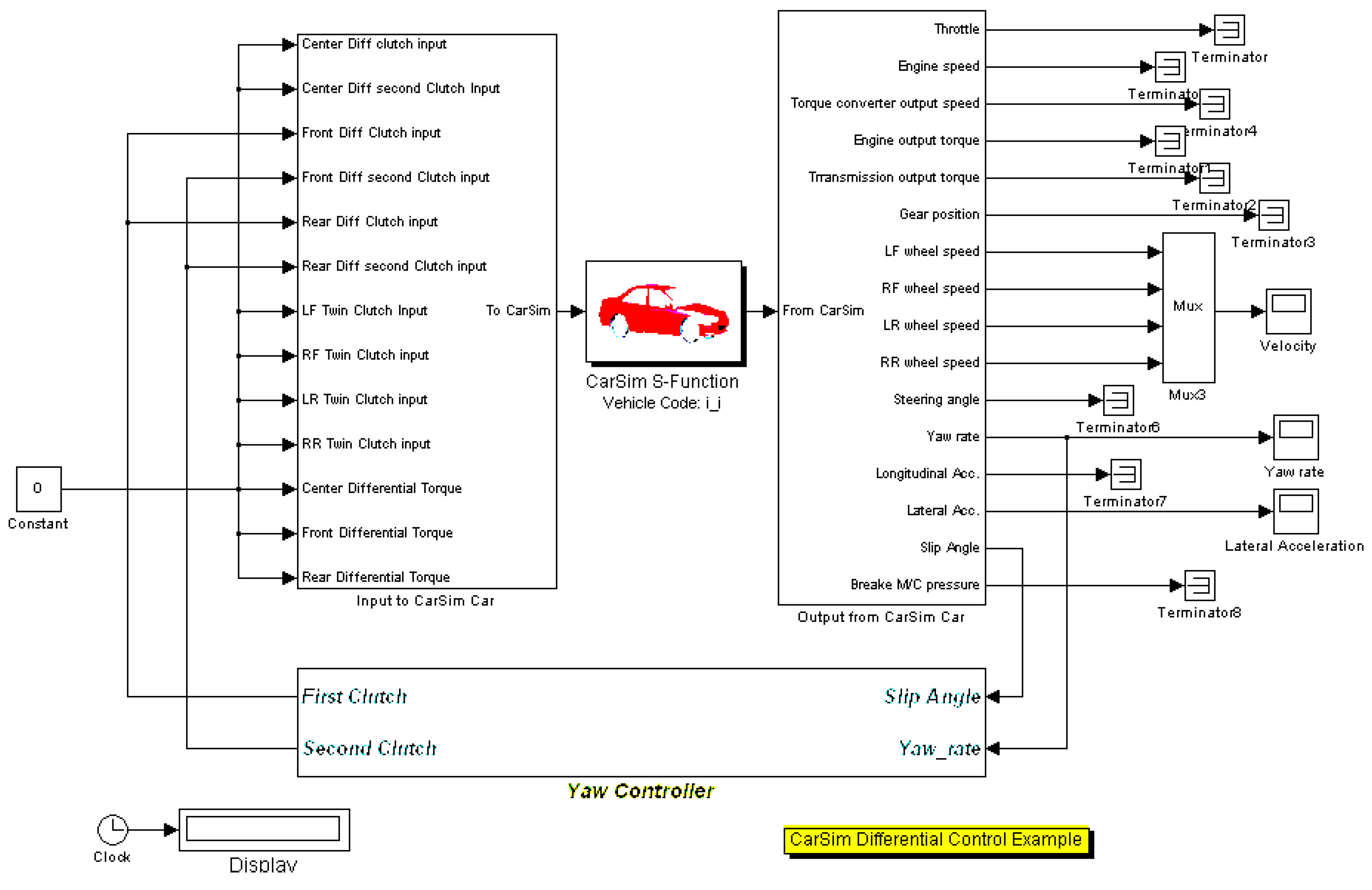
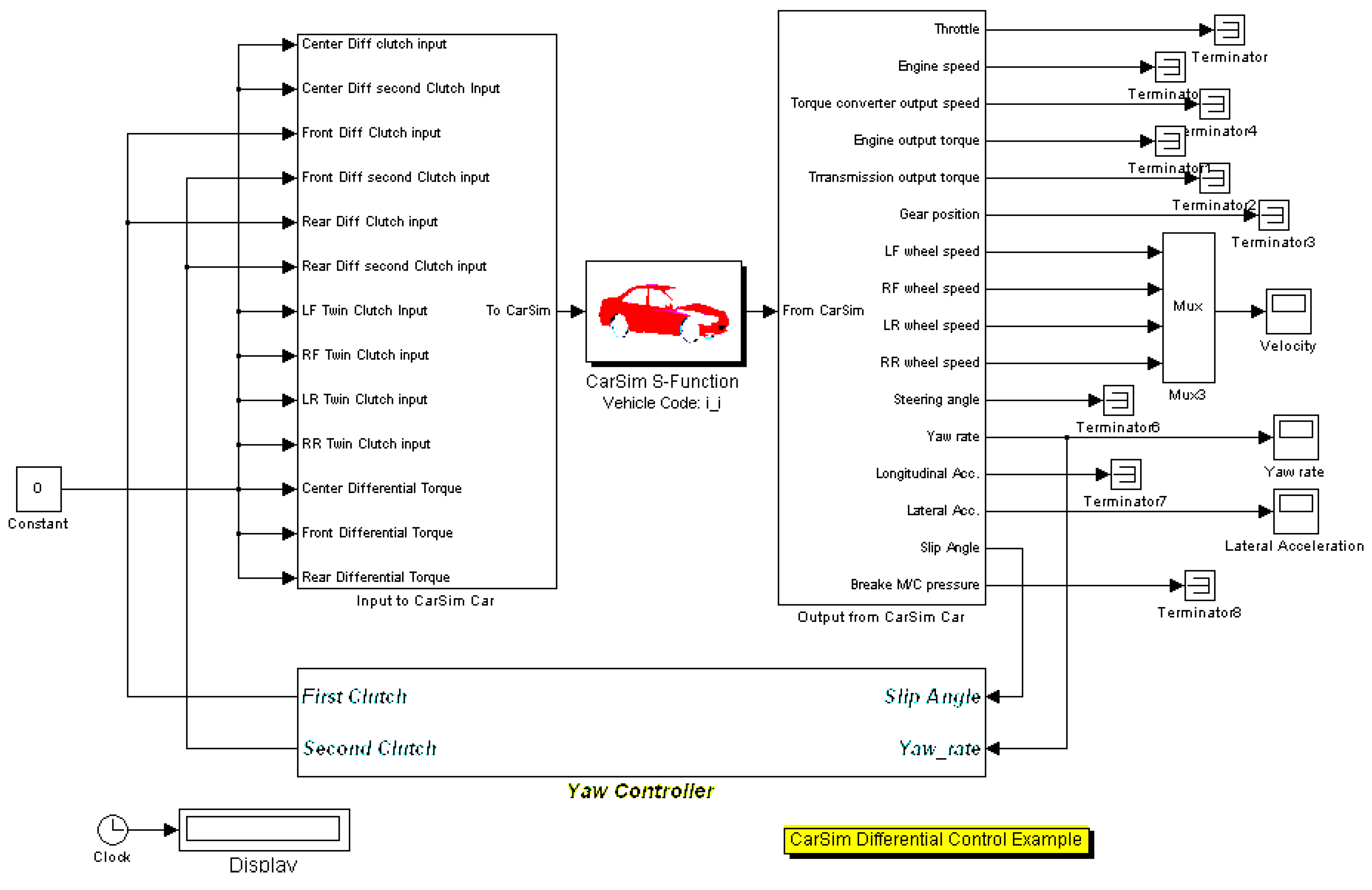
4. Application



5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zeng, L.H.; Li, G.M. World Expo 2010 promotes the reduction in carbon emissions of urban transport. In Proceedings of the 2013 2nd International Conference on Sustainable Energy and Environmental Engineering, ICSEEE 2013, Shenzhen, China, 28–29 December 2013; Volume 525.
- Huang, C.; Chen, L.; Jiang, H.B.; Yuan, C.C.; Xia, T. Nonlinear analysis and intelligent control of integrated vehicle dynamics. Math. Probl. Eng. 2014, 2014, doi101155/2014/832864. [Google Scholar] [CrossRef]
- De Novellis, L.; Sorniotti, A.; Gruber, P.; Pennycott, A. Comparison of feedback control techniques for torque-vectoring control of fully electric vehicles. IEEE Trans. Veh. Technol. 2014, 63, 3612–3623. [Google Scholar] [CrossRef]
- Nam, K.; Fujimoto, H.; Hori, Y. Lateral stability control of in-wheel-motor-driven electric vehicles based on sideslip angle estimation using lateral tire force sensors. IEEE Trans. Veh. Technol. 2012, 61, 1972–1985. [Google Scholar]
- Doumiati, M.; Victorino, A.; Charara, A.; Lechner, D. Estimation of vehicle lateral tire-road forces: A comparison between extended and unscented kalman filtering. In Proceedings of the 2009 10th European Control Conference (ECC 2009), Budapest, Hungary, 23–26 August 2009; pp. 4804–4809.
- Aouaouda, S.; Chadli, M.; Boukhnifer, M.; Karimi, H.R. Robust fault tolerant tracking controller design for vehicle dynamics: A descriptor approach. Mechatronics 2015. [CrossRef]
- Ding, Q.; Peng, Z.; Liu, T.; Tong, Q. Multi-Sensor Building Fire Alarm System with Information Fusion Technology Based on DS Evidence Theory. Algorithms 2014, 7, 523–537. [Google Scholar] [CrossRef]
- Lin, C.; Zhou, F.J.; Cao, W.K.; Wang, G.; Xu, Z.F. Study of the estimation of vehicle sideslip angle based on cdkf. J. Beijing Inst. Technol. 2014, 23, 29–34. (In English) [Google Scholar]
- Bevly, D.M.; Ryu, J.; Gerdes, J.C. Integrating ins sensors with gps measurements for continuous estimation of vehicle sideslip, roll, and tire cornering stiffness. IEEE Trans. Intell. Transp. Syst. 2006, 7, 483–493. [Google Scholar] [CrossRef]
- Fossen, T.I.; Pettersen, K.Y.; Galeazzi, R. Line-of-sight path following for dubins paths with adaptive sideslip compensation of drift forces. IEEE Trans. Control Syst. Technol. 2014, 23, 820–827. [Google Scholar] [CrossRef]
- Wang, E.C.; Shi, L.Y. An improved wideband dipole antenna for global navigation satellite system. IEEE Antennas Wirel. Propag. Lett. 2014, 13, 1305–1308. [Google Scholar] [CrossRef]
- Rodger, J.A. Toward reducing failure risk in an integrated vehicle health maintenance system: A fuzzy multi-sensor data fusion kalman filter approach for ivhms. Expert Syst. Appl. 2012, 39, 9821–9836. [Google Scholar] [CrossRef]
- Yoon, J.-H.; Peng, H. Vehicle sideslip angle estimation using two single-antenna gps receivers. In Proceedings of the ASME 2010 Dynamic Systems and Control Conference (DSCC2010), Cambridge, MA, USA, 13–15 September 2010; pp. 863–870.
- Ryan, J.G.; Bevly, D.M. On the observability of loosely coupled global positioning system/inertial navigation system integrations with five degree of freedom and four degree of freedom inertial measurement units. J. Dyn. Syst. Meas. Control Trans. ASME 2014, 136. [Google Scholar] [CrossRef]
- Cao, J.Y.; Jing, L.X.; Guo, K.H.; Yu, F. Study on integrated control of vehicle yaw and rollover stability using nonlinear prediction model. Math. Probl. Eng. 2013, 2013. [Google Scholar] [CrossRef]
- Baffet, G.; Charara, A.; Stephant, J. Sideslip angle, lateral tire force and road friction estimation in simulations and experiments. In Proceedings of the Joint 2006 IEEE Conference on Control Applications (CCA), Computer-Aided Control Systems Design Symposium (CACSD) and International Symposium on Intelligent Control (ISIC), Munich, Germany, 4–6 October 2006; pp. 903–908.
- Wan, K.; Dong, Y.; Chang, Q.; Qian, T. Applying a dynamic resource supply model in a smart grid. Algorithms 2014, 7, 471–491. [Google Scholar] [CrossRef]
- Premanode, B.; Vongprasert, J.; Toumazou, C. Noise reduction for nonlinear nonstationary time series data using averaging intrinsic mode function. Algorithms 2013, 6, 407–429. [Google Scholar] [CrossRef]
- Xin, X.; Chen, J.; Zou, J. Vehicle state estimation using cubature kalman filter. In Proceedings of the 17th IEEE International Conference on Computational Science and Engineering (CSE), Chengdu, China, 19–21 December 2014.
- He, H.B.; Li, J.L.; Yang, Y.X.; Xu, J.Y.; Guo, H.R.; Wang, A.B. Performance assessment of single- and dual-frequency beidou/gps single-epoch kinematic positioning. GPS Solut. 2014, 18, 393–403. [Google Scholar] [CrossRef]
- Hrgetic, M.; Deur, J.; Pavkovic, D.; Barber, P. Adaptive EKF-based estimator of sideslip angle using fusion of inertial sensors and GPS. SAE Int. J. Passeng. Cars—Mech. Syst. 2011, 4, 700–712. [Google Scholar] [CrossRef]
- Miao, Z.B.; Zhang, H.T. Vehicle stability testing using the dewetron test system. Electron. World 2013, 1927, 24–26. [Google Scholar]
- Doumiati, M.; Victorino, A.C.; Charara, A.; Lechner, D. Onboard real-time estimation of vehicle lateral tire-road forces and sideslip angle. IEEE/ASME Trans. Mechatron. 2011, 16, 601–614. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, J. Robust sideslip angle estimation for over-actuated electric vehicles: A linear parameter varying system approach. In Proceedings of the ASME 2013 Dynamic Systems and Control Conference (DSCC 2013), Palo Alto, CA, USA, 21–23 October 2013.
- Zhang, Y.; Zhang, H.; Lu, C. Study on parameter optimization design of drum brake based on hybrid cellular multiobjective genetic algorithm. Math. Probl. Eng. 2012, 2012. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miao, Z.; Zhang, H. Data Fusion Modeling for an RT3102 and Dewetron System Application in Hybrid Vehicle Stability Testing. Algorithms 2015, 8, 632-644. https://doi.org/10.3390/a8030632
Miao Z, Zhang H. Data Fusion Modeling for an RT3102 and Dewetron System Application in Hybrid Vehicle Stability Testing. Algorithms. 2015; 8(3):632-644. https://doi.org/10.3390/a8030632
Chicago/Turabian StyleMiao, Zhibin, and Hongtian Zhang. 2015. "Data Fusion Modeling for an RT3102 and Dewetron System Application in Hybrid Vehicle Stability Testing" Algorithms 8, no. 3: 632-644. https://doi.org/10.3390/a8030632
APA StyleMiao, Z., & Zhang, H. (2015). Data Fusion Modeling for an RT3102 and Dewetron System Application in Hybrid Vehicle Stability Testing. Algorithms, 8(3), 632-644. https://doi.org/10.3390/a8030632