
Combining the A* Algorithm with Neural Networks to Solve the Team Orienteering Problem with Obstacles and Environmental Factors





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Related Work
3. Problem Formulation
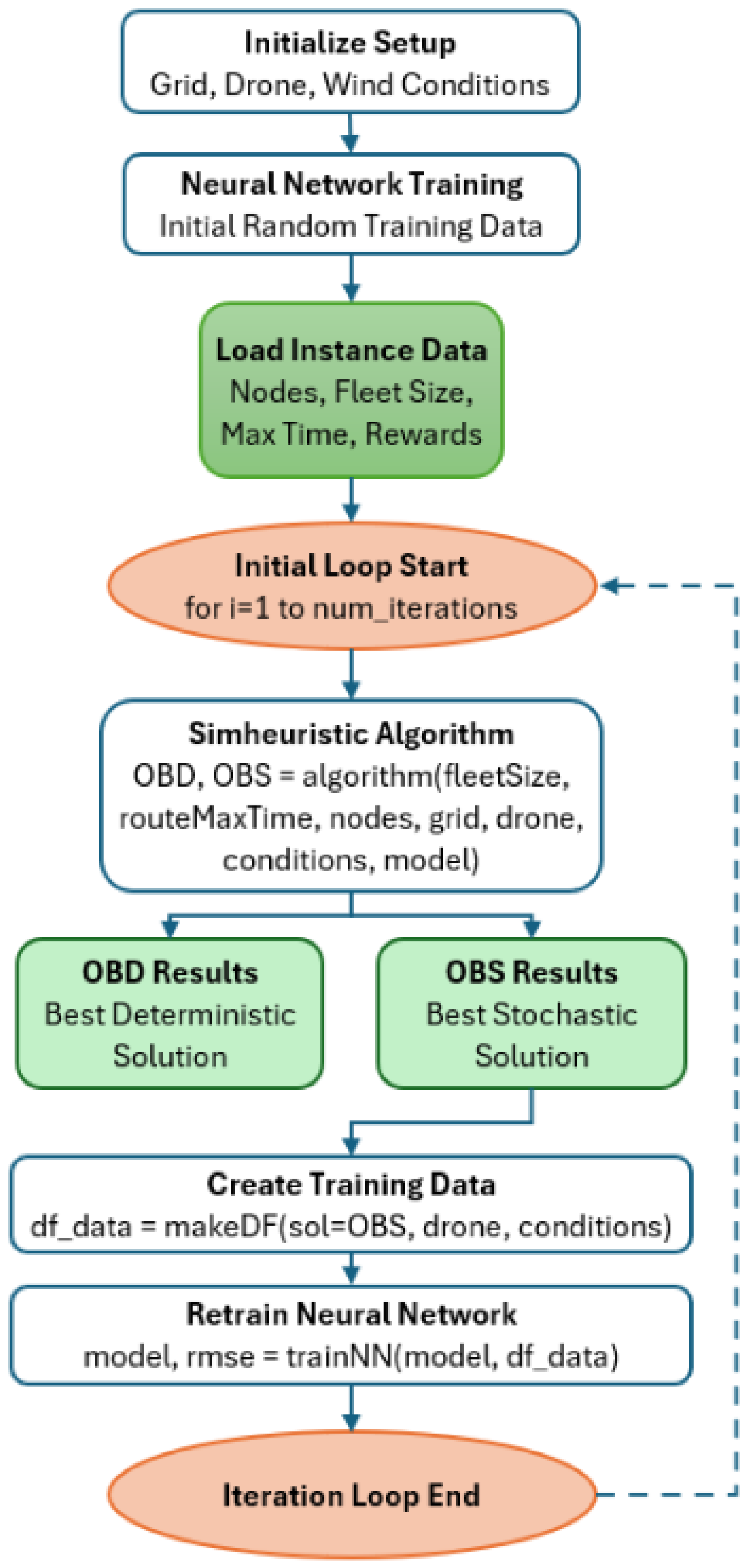
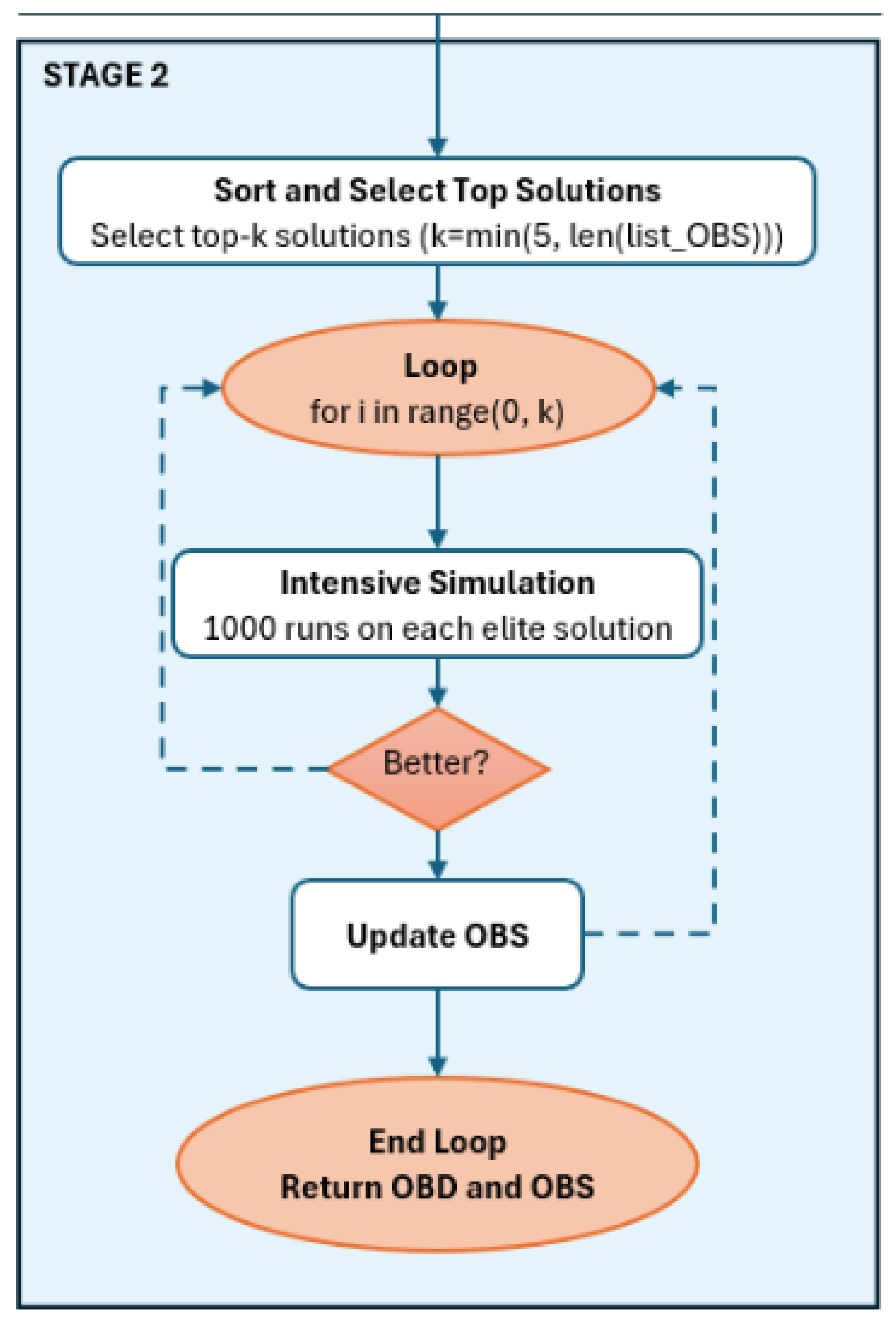
4. Solution Method
4.1. Overview of Our Approach
4.2. Black-Box Modeling of UAV Travel Time on an Arc
4.3. A White-Box Neural Network Approach for Travel Time Estimation
4.4. Modeling Travel Time Uncertainty
5. Numerical Experiments and Analysis of Results
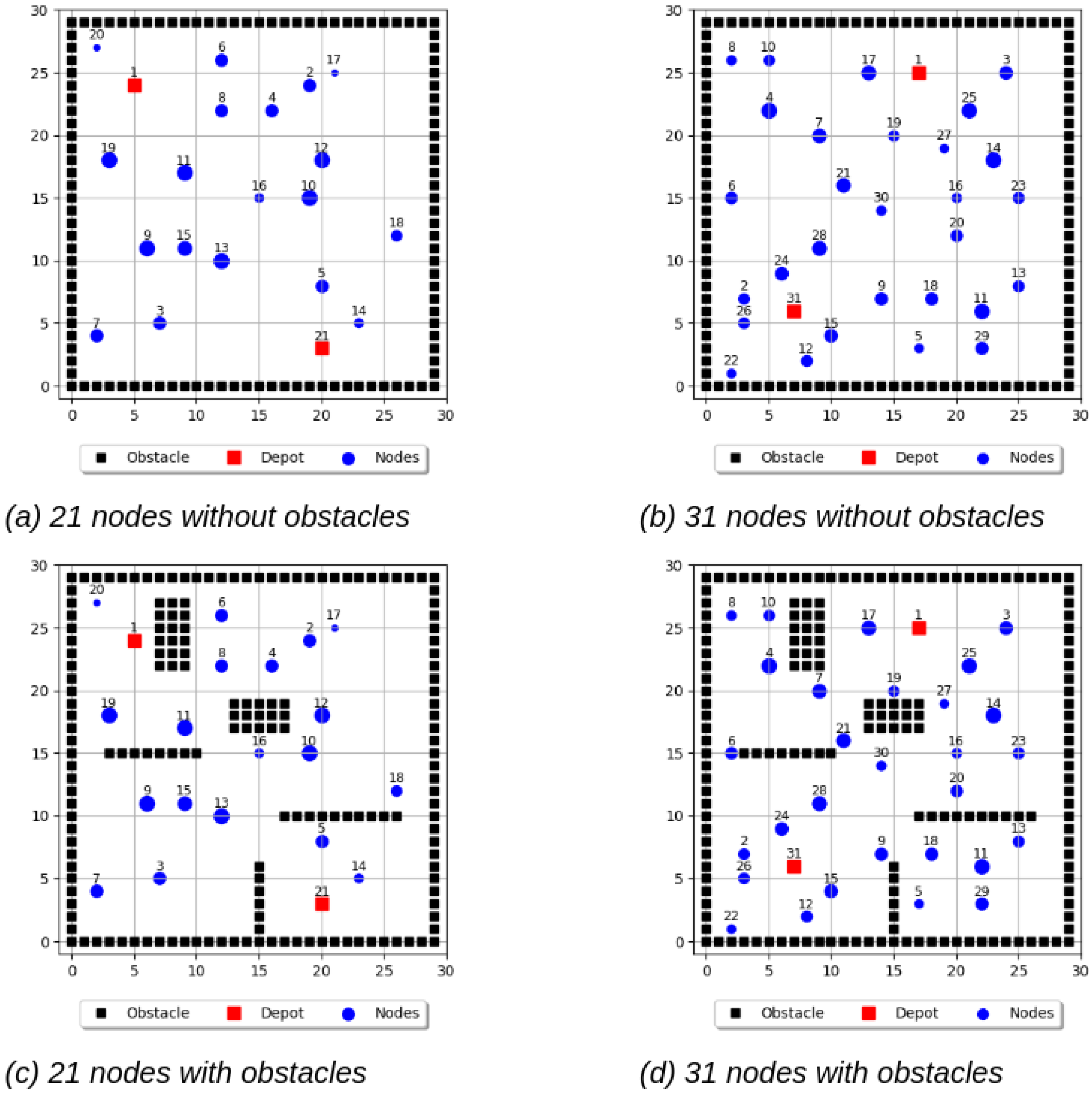
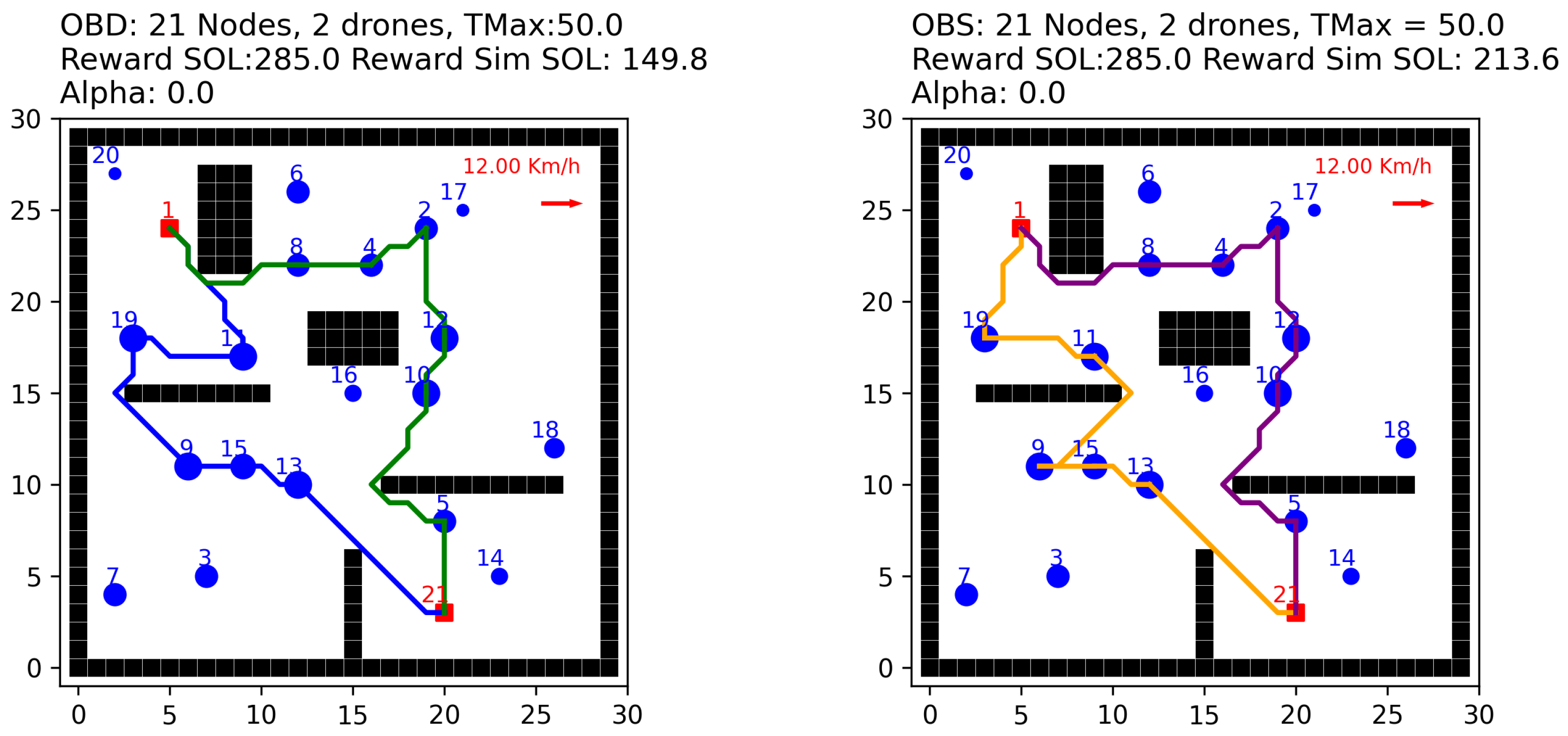
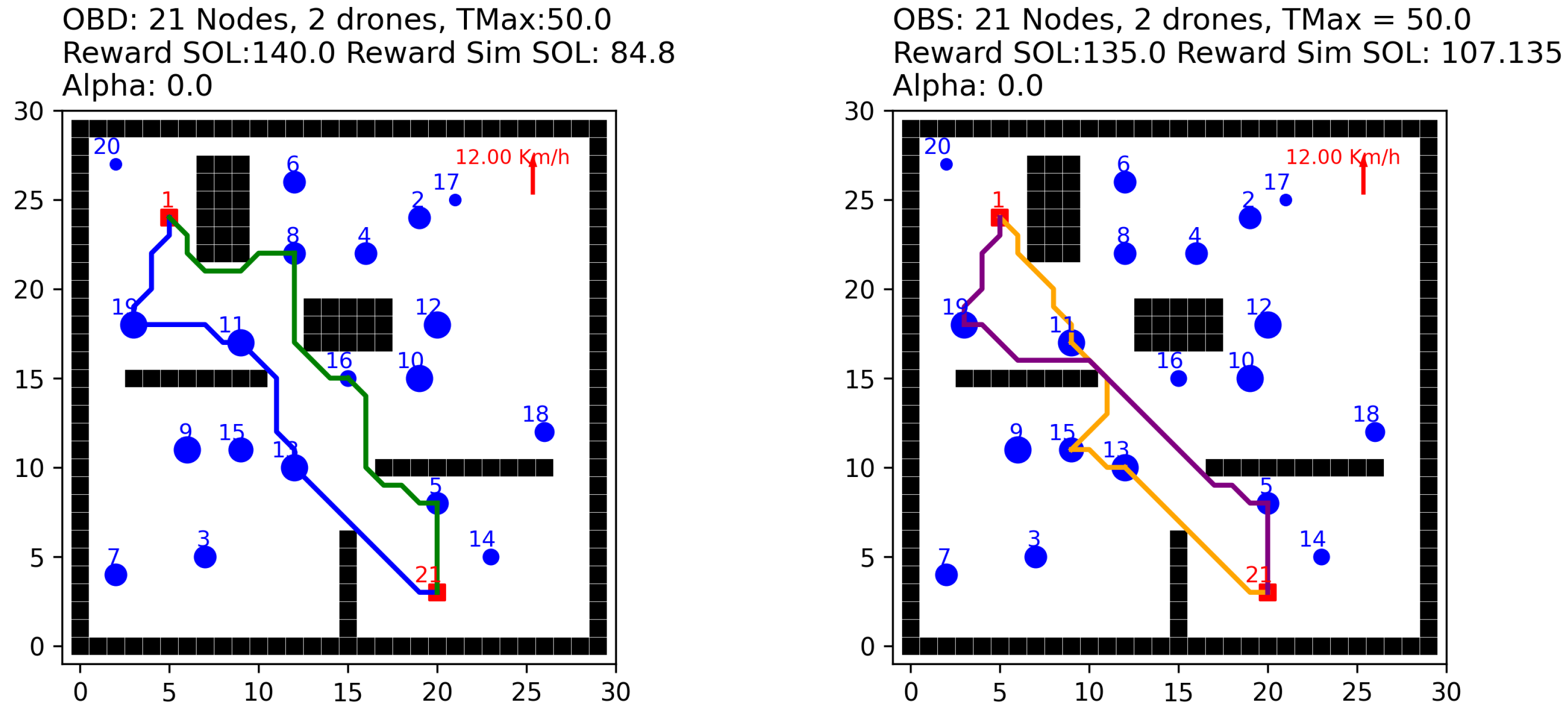
- Obstacle configuration: Two scenarios were tested, obstacle-free environments and environments with strategically placed obstacles that UAVs must avoid.
- Wind conditions: Wind speed was varied between 0 km/min (no wind) and km/min, with directional variations at , , , and .
- Payload weight: Tests were conducted with payloads of 0 kg (no payload) and 1 kg.
- UAV travel speed: Two different UAV speeds were examined, km/min and km/min.
- Route duration limitations: Maximum route durations of 36 min and 46 min were imposed, reflecting typical operational constraints in real-world UAV deployments.
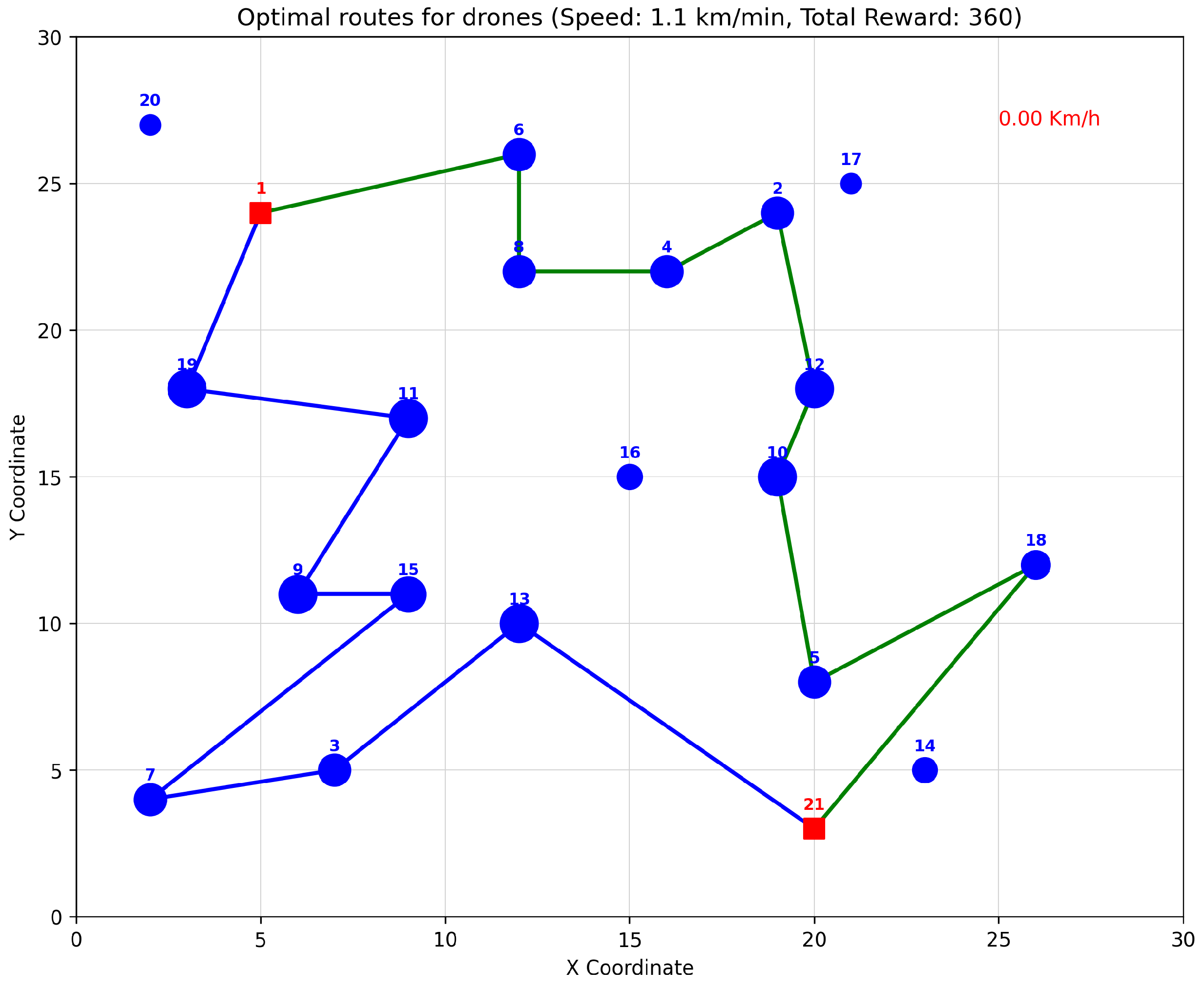
5.1. Solving the Standard TOP Without Obstacles or Environmental Factors
5.2. Solving the TOP with Obstacles and Environmental Factors
6. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chao, I.M.; Golden, B.L.; Wasil, E.A. The team orienteering problem. Eur. J. Oper. Res. 1996, 88, 464–474. [Google Scholar] [CrossRef]
- Gunawan, A.; Lau, H.C.; Vansteenwegen, P. Orienteering Problem: A survey of recent variants, solution approaches and applications. Eur. J. Oper. Res. 2016, 255, 315–332. [Google Scholar] [CrossRef]
- Xu, W.; Xu, Z.; Peng, J.; Liang, W.; Liu, T.; Jia, X.; Das, S.K. Approximation Algorithms for the Team Orienteering Problem. In Proceedings of the IEEE INFOCOM 2020-IEEE Conference on Computer Communications, Toronto, ON, Canada, 6–9 July 2020; pp. 1389–1398. [Google Scholar] [CrossRef]
- Boussier, S.; Feillet, D.; Gendreau, M. An exact algorithm for team orienteering problems. 4OR 2007, 5, 211–230. [Google Scholar] [CrossRef]
- Vansteenwegen, P.; Souffriau, W.; Oudheusden, D.V. The orienteering problem: A survey. Eur. J. Oper. Res. 2011, 209, 1–10. [Google Scholar] [CrossRef]
- Panadero, J.; Juan, A.A.; Ghorbani, E.; Faulin, J.; Pagès-Bernaus, A. Solving the stochastic team orienteering problem: Comparing simheuristics with the sample average approximation method. Int. Trans. Oper. Res. 2024, 31, 3036–3060. [Google Scholar] [CrossRef]
- Vansteenwegen, P.; Gunawan, A. Orienteering Problems; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Aringhieri, R.; Bigharaz, S.; Duma, D.; Guastalla, A. Novel Applications of the Team Orienteering Problem in Health Care Logistics. In Proceedings of the Optimization in Artificial Intelligence and Data Sciences; Amorosi, L., Dell’Olmo, P., Lari, I., Eds.; Springer: Cham, Switzerland, 2022; pp. 235–245. [Google Scholar] [CrossRef]
- Moosavi Heris, F.S.; Ghannadpour, S.F.; Bagheri, M.; Zandieh, F. A new accessibility based team orienteering approach for urban tourism routes optimization (A Real Life Case). Comput. Oper. Res. 2022, 138, 105620. [Google Scholar] [CrossRef]
- Du, J.; Wu, P. Deep reinforcement learning for UAVs rolling horizon team orienteering problem under ECA. Ocean Eng. 2025, 326, 120781. [Google Scholar] [CrossRef]
- Foead, D.; Ghifari, A.; Kusuma, M.B.; Hanafiah, N.; Gunawan, E. A systematic literature review of A* pathfinding. Procedia Comput. Sci. 2021, 179, 507–514. [Google Scholar] [CrossRef]
- Farid, G.; Cocuzza, S.; Younas, T.; Razzaqi, A.A.; Wattoo, W.A.; Cannella, F.; Mo, H. Modified A-Star (A*) Approach to Plan the Motion of a Quadrotor UAV in Three-Dimensional Obstacle-Cluttered Environment. Appl. Sci. 2022, 12, 5791. [Google Scholar] [CrossRef]
- Nehra, N.; Sangwan, P.; Kumar, D. Artificial neural networks: A comprehensive review. In Handbook of Machine Learning for Computational Optimization; Taylor Francis: Boca Raton, FL, USA, 2021; pp. 203–227. [Google Scholar]
- Kirac, E.; Milburn, A.B.; Gedik, R. The Dynamic Team Orienteering Problem. Eur. J. Oper. Res. 2025, 324, 22–39. [Google Scholar] [CrossRef]
- Vansteenwegen, P.; Souffriau, W.; Berghe, G.V.; Van Oudheusden, D. Iterated local search for the team orienteering problem with time windows. Comput. Oper. Res. 2009, 36, 3281–3290. [Google Scholar] [CrossRef]
- Gunawan, A.; Ng, K.M.; Kendall, G.; Lai, J. An iterated local search algorithm for the team orienteering problem with variable profits. Eng. Optim. 2018, 50, 1148–1163. [Google Scholar] [CrossRef]
- Vincent, F.Y.; Salsabila, N.Y.; Lin, S.W.; Gunawan, A. Simulated annealing with reinforcement learning for the set team orienteering problem with time windows. Expert Syst. Appl. 2024, 238, 121996. [Google Scholar]
- Lin, S.W.; Vincent, F.Y. A simulated annealing heuristic for the team orienteering problem with time windows. Eur. J. Oper. Res. 2012, 217, 94–107. [Google Scholar] [CrossRef]
- Narin, A.B.; Becker, J.; Batta, R. UAV search optimization for recording emerging targets with camouflaging capabilities. J. Def. Model. Simul. 2023, 22, 15485129231203020. [Google Scholar] [CrossRef]
- Fang, C.; Han, Z.; Wang, W.; Zio, E. Routing UAVs in landslides Monitoring: A neural network heuristic for team orienteering with mandatory visits. Transp. Res. Part E Logist. Transp. Rev. 2023, 175, 103172. [Google Scholar] [CrossRef]
- Zhu, M.; Du, X.; Zhang, X.; Luo, H.; Wang, G. Multi-UAV rapid-assessment task-assignment problem in a post-earthquake scenario. IEEE Access 2019, 7, 74542–74557. [Google Scholar] [CrossRef]
- Li, Y.; Peyman, M.; Panadero, J.; Juan, A.A.; Xhafa, F. IoT analytics and agile optimization for solving dynamic team orienteering problems with mandatory visits. Mathematics 2022, 10, 982. [Google Scholar] [CrossRef]
- Bayliss, C.; Juan, A.A.; Currie, C.S.; Panadero, J. A learnheuristic approach for the team orienteering problem with aerial drone motion constraints. Appl. Soft Comput. 2020, 92, 106280. [Google Scholar] [CrossRef]
- Hussein, A.A.; Yaseen, E.T.; Rashid, A.N. Learnheuristics in routing and scheduling problems: A review. Samarra J. Pure Appl. Sci. 2023, 5, 60–90. [Google Scholar] [CrossRef]
- Uguina, A.R.; Gomez, J.F.; Panadero, J.; Martínez-Gavara, A.; Juan, A.A. A Learnheuristic Algorithm Based on Thompson Sampling for the Heterogeneous and Dynamic Team Orienteering Problem. Mathematics 2024, 12, 1758. [Google Scholar] [CrossRef]
- Nekovář, F.; Faigl, J.; Saska, M. Multi-vehicle dynamic water surface monitoring. IEEE Robot. Autom. Lett. 2023, 8, 6323–6330. [Google Scholar] [CrossRef]
- Zhu, M.; Zhang, X.; Luo, H.; Wang, G.; Zhang, B. Optimization Dubins path of multiple UAVs for post-earthquake rapid-assessment. Appl. Sci. 2020, 10, 1388. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Freixes, A.; Panadero, J.; Juan, A.A.; Serrat, C. Combining the A* Algorithm with Neural Networks to Solve the Team Orienteering Problem with Obstacles and Environmental Factors. Algorithms 2025, 18, 309. https://doi.org/10.3390/a18060309
Freixes A, Panadero J, Juan AA, Serrat C. Combining the A* Algorithm with Neural Networks to Solve the Team Orienteering Problem with Obstacles and Environmental Factors. Algorithms. 2025; 18(6):309. https://doi.org/10.3390/a18060309
Chicago/Turabian StyleFreixes, Alfons, Javier Panadero, Angel A. Juan, and Carles Serrat. 2025. "Combining the A* Algorithm with Neural Networks to Solve the Team Orienteering Problem with Obstacles and Environmental Factors" Algorithms 18, no. 6: 309. https://doi.org/10.3390/a18060309
APA StyleFreixes, A., Panadero, J., Juan, A. A., & Serrat, C. (2025). Combining the A* Algorithm with Neural Networks to Solve the Team Orienteering Problem with Obstacles and Environmental Factors. Algorithms, 18(6), 309. https://doi.org/10.3390/a18060309