
Particle Swarm Optimization Support Vector Machine-Based Grounding Fault Detection Method in Distribution Network

Abstract
:1. Introduction
2. Single-Phase Grounding Fault Detection Model Based on Particle Swarm Optimization Support Vector Machine Algorithm
2.1. Support Vector Machine Algorithm
2.2. Particle Swarm Optimization
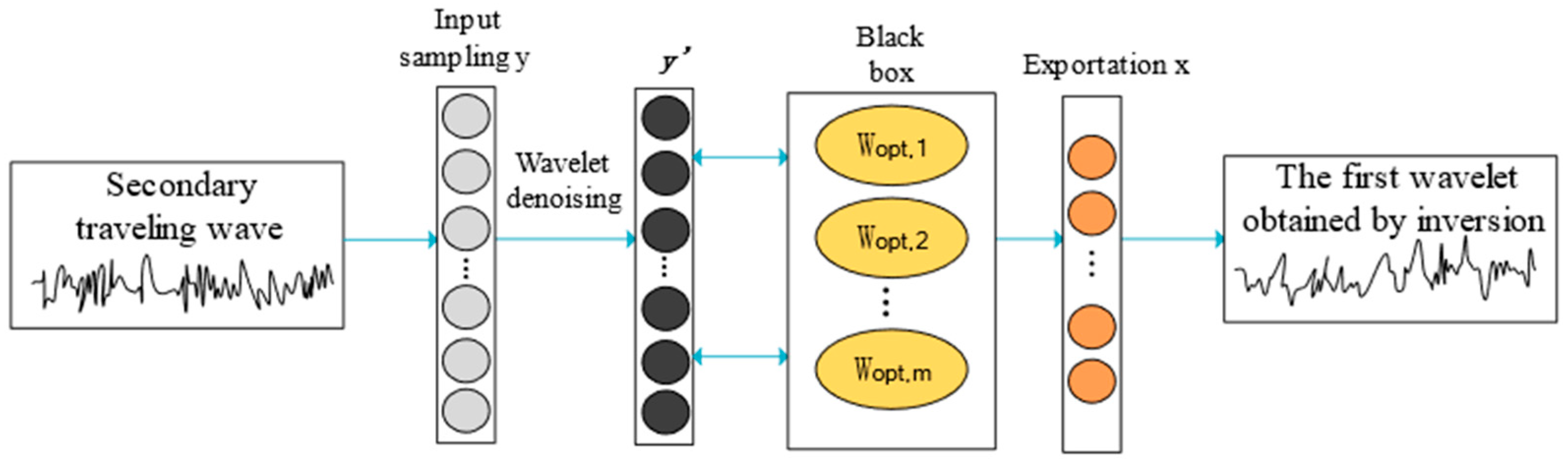
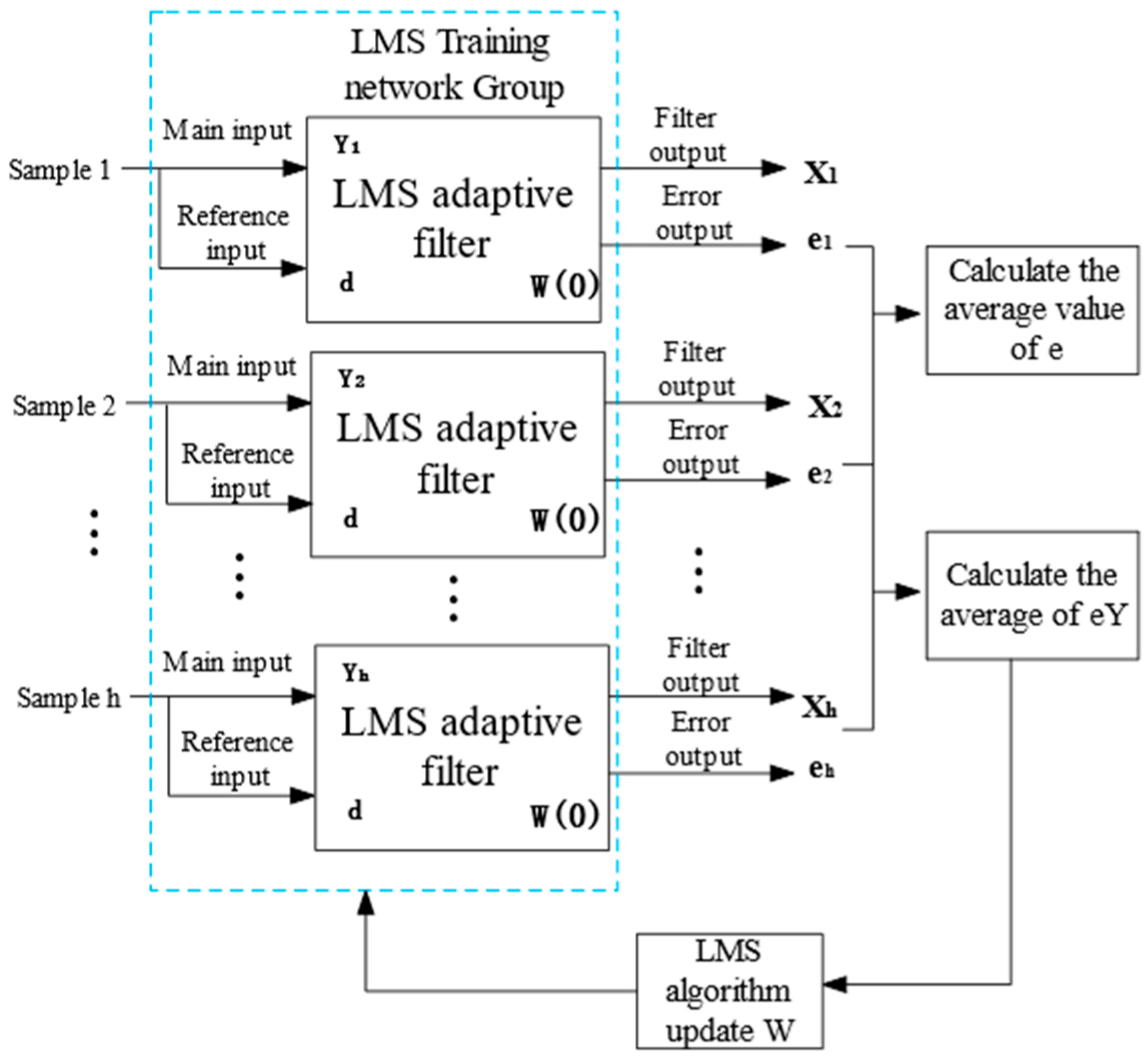
2.3. Wavelet Denoising
2.4. Model Construction
2.5. True Experimental Data Processing
3. Single-Phase Grounding Fault Testbed
3.1. Simulation Platform
3.2. Experimental Platform
4. Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ye, Y.; Wang, S.; Huang, T.; Wei, L. Study on Grounding Mode of Neutral Point through Arc Suppression Coil in Parallel with Median Resistance. J. Electr. Eng. 2021, 16, 159–165. [Google Scholar]
- Tian, P.; Qin, H.; Naiqian, H.; Qiang, Z. Fault Location Method for Distribution Network Based on Edge Computing and Wide Area Synchronous Measurement Technology. J. Electr. Eng. 2020, 15, 83–88. [Google Scholar]
- Ye, B.; Xue, C.; Zhang, H.; Han, Y.; Liu, B. Research on fault line selection in distribution network based on feature band wavelet packet analysis. J. Electr. Eng. 2018, 13, 24–28. [Google Scholar]
- Liu, Y.; Zhang, X.; Lv, Z.; Xu, Z.; Liu, Y. Research on intelligent diagnosis and route selection method of multi-load circuit series fault arc. J. Electr. Eng. 2023, 18, 378–388. [Google Scholar]
- Li, W.; Xu, W.; Wang, X.; Lu, G. Fault location method for active distribution network based on generalized S transform. Electr. Meas. Instrum. 2021, 58, 105–112. [Google Scholar]
- Yang, W.; Zhang, B.; Ye, X.; Zhao, Q. Sensor fault detection method in distribution network based on energy balance. Autom. Electr. Power Syst. 2018, 42, 154–159. [Google Scholar]
- Li, Z.; Liu, Y.; Yan, Y.; Wang, P.; Jiang, X. An identification method for asymmetric faults with line breaks based on low-voltage side data in distribution networks. IEEE Trans. Power Deliv. 2021, 36, 3629–3639. [Google Scholar]
- Liu, B.; Wang, C.; Zeng, X.; Wan, Z. Single line-to-ground fault protection method considering three phase-to-ground parameters asymmetry in active flexible grounding systems. IEEE Trans. Power Deliv. 2024, 39, 2207–2218. [Google Scholar] [CrossRef]
- Liu, J.; Tai, N.; Fan, C.; Chen, S. A Hybrid Current-limiting Circuit for DC Line Fault in Multi-terminal VSC-HVDC System. IEEE Trans. Ind. Electron. 2017, 64, 5595–5607. [Google Scholar] [CrossRef]
- Ali, M.S.; Abu Bakar, A.H.; Mokhlis, H.; Arof, H.; Azil Illias, H. High-impedance fault location using matching technique and wavelet transform for underground cable distribution network. IEEJ Trans. Electr. Electron. Eng. 2014, 9, 176–182. [Google Scholar] [CrossRef]
- Liu, P.; Du, S.; Sun, K.; Zhu, J.; Xie, D.; Liu, Y. Single-line-to-ground fault feeder selection considering device polarity reverse installation in resonant grounding system. IEEE Trans. Power Deliv. 2021, 36, 2204–2212. [Google Scholar] [CrossRef]
- Xue, Y.; Li, J.; Xu, B. Transient equivalent circuit and transient analysis of single-phase earth fault in arc suppression coil grounded system. Proc. CSEE 2015, 35, 5703–5714. [Google Scholar]
- Yang, F.; Zhang, X.; Wang, Z.; Chen, S. Over-current protection of micro-grid with distributed generators. J. Shanghai Dianji Univ. 2015, 18, 89–94. [Google Scholar]
- Lv, X.; Yuan, L.; Zuo, L.; He, Y.; Ding, C. An improved Bayesian learning method for distribution grid fault location and meter deployment optimization. IEEE Trans. Instrum. Meas. 2024, 73, 3519910. [Google Scholar] [CrossRef]
- Zhang, P.; Jin, M.; Liang, R.; Hou, M.; Peng, N.; Li, J. Faulty cable segment identification of low-resistance grounded active distributions via grounding wire current-based approach. IEEE Trans. Ind. Inform. 2024, 20, 7708–7718. [Google Scholar] [CrossRef]
- Liu, S.; Liu, H.; Bi, T.; Yu, X.; Jiang, Y. Fault Detection of Distribution Network Considering High Impedance Faults. Power Syst. Technol. 2023, 47, 3438–3448. [Google Scholar]
- Li, T.; Xu, B.; Xue, Y. High-impedance fault protection of distribution networks and its developments. Distrib. Util. 2018, 35, 2–6. [Google Scholar]
- Han, W.; Xu, J.; Mu, G. The analysis of earth fault with high resistance to longitudinal distance protection. Shanxi Electr. Power 2017, 3, 22–25. [Google Scholar]
- James, J.Q.; Hou, Y.; Lam, A.Y.; Li, V.O. Intelligent fault detection scheme for microgrids with wavelet-based deep neural networks. IEEE Trans. Smart Grid 2019, 10, 1694–1703. [Google Scholar]
- Yang, S.; Wu, S.; Dai, C. A method to fast recognize short-circuit fault based on curvature of line current wave form. Power Syst. Technol. 2013, 37, 551–556. [Google Scholar]
- Sidhu, T.S.; Xu, Z. Detection of incipient faults in distribution underground cables. IEEE Trans. Power Deliv. 2010, 25, 1363–1371. [Google Scholar] [CrossRef]
- Salim, R.H.; de Oliveira, K.R.C.; Filomena, A.D.; Resener, M.; Bretas, A.S. Hybrid fault diagnosis scheme implementation for power distribution systems automation. IEEE Trans. Power Deliv. 2008, 23, 1846–1856. [Google Scholar] [CrossRef]
- He, Z.; Cai, Y.; Qian, Q. A study of wavelet entropy theory and its application in electric power system fault detection. Proc. CSEE 2005, 25, 38–43. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Detection Method | Strengths | Drawbacks |
|---|---|---|
| Impedance method | 1. Low requirements on equipment insulation | 1. Affected by the system operation mode 2. Low measurement accuracy |
| STFT | 1. Reliable, 2. Small calculation; | 1. Time–frequency resolution is limited |
| WT | 1. High time–frequency resolution | 1. High complexity |
| S-transform | 1. High precision 2. Fast response speed | 1. The robustness is low |
| Traveling wave method | 1. Not affected by the system running mode | 1. Difficulty in capturing the initial traveling Bob 2. Low sensitivity |
| Injection method | 1. Strong recognition ability | 1. Requires a large number of training samples 2. Engineering application limitation |
| Artificial neural network | 1. Good fault tolerance | 1. A lot of training data are required 2. The model structure and parameter selection are complex |
| Zero-sequence over current protection | 1. Effective grounding short-circuit protection | 1. Difficult to detect high-impedance faults 2. Accuracy is susceptible to noise interference |
| Threshold method | 1. Small computation 2. High reliability | 1. The requirements for setting the threshold are high 2. Poor adaptability |
| Artificial intelligence method | 1. Strong ability to deal with complex nonlinear relationships | 1. A lot of training data are required |
| Detection Accuracy | Convergence Rate (ms) | |
|---|---|---|
| PSO | 25.5 | |
| SVM | 85.6% | 15.1 |
| The traditional PSO-SVM | 92.3% | 211 |
| The improved PSO-SVM | 99.7% | 156 |
| WT | 80.0% | - |
| STFT | 75.0% | - |
| HHT | 85.7% | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, Z.; Huang, S.; Ren, S.; Lin, Y.; Li, Z.; Li, D.; Deng, F. Particle Swarm Optimization Support Vector Machine-Based Grounding Fault Detection Method in Distribution Network. Algorithms 2025, 18, 259. https://doi.org/10.3390/a18050259
Xiong Z, Huang S, Ren S, Lin Y, Li Z, Li D, Deng F. Particle Swarm Optimization Support Vector Machine-Based Grounding Fault Detection Method in Distribution Network. Algorithms. 2025; 18(5):259. https://doi.org/10.3390/a18050259
Chicago/Turabian StyleXiong, Zhongqin, Shichang Huang, Shen Ren, Yutong Lin, Zewen Li, Dongyu Li, and Fangming Deng. 2025. "Particle Swarm Optimization Support Vector Machine-Based Grounding Fault Detection Method in Distribution Network" Algorithms 18, no. 5: 259. https://doi.org/10.3390/a18050259
APA StyleXiong, Z., Huang, S., Ren, S., Lin, Y., Li, Z., Li, D., & Deng, F. (2025). Particle Swarm Optimization Support Vector Machine-Based Grounding Fault Detection Method in Distribution Network. Algorithms, 18(5), 259. https://doi.org/10.3390/a18050259