
Optimal View Estimation Algorithm and Evaluation with Deviation Angle Analysis


Abstract
1. Introduction
- (1)
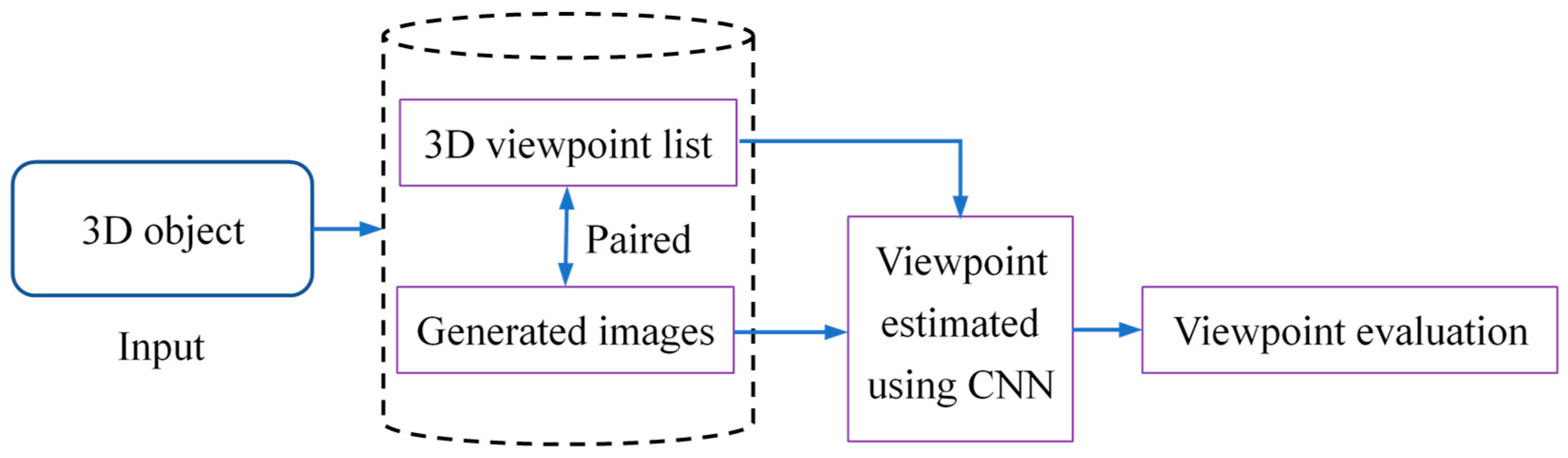
- We propose an image-based viewpoint estimation method that demonstrates the complete process from creating a dataset to evaluating the results.
- (2)
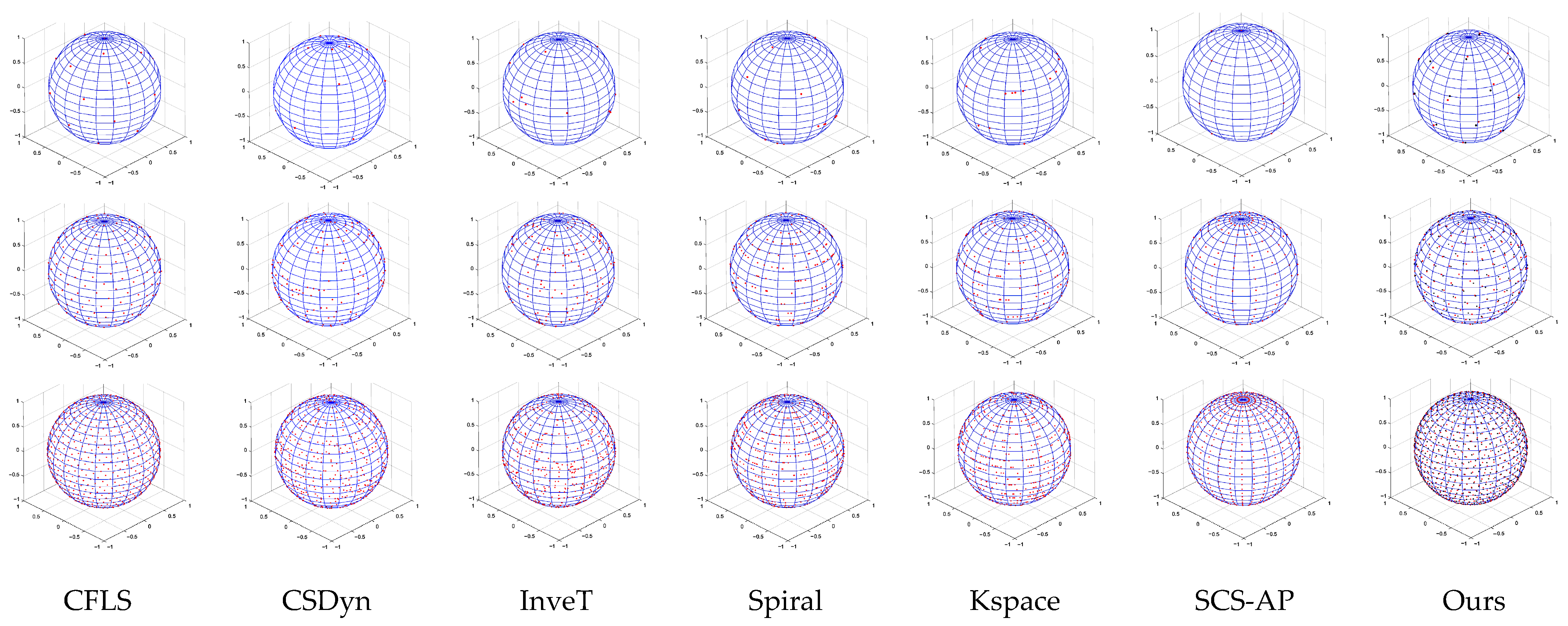
- In the viewpoint position selection module, we integrate the initial viewpoint moving strategy into the spherical viewpoint uniform sampling based on analytical methods to enhance the effectiveness of spherical uniform random sampling.
- (3)
- A new dataset has been established and made available on the GitHub website. Based on the new dataset learning, we implemented image-based viewpoint estimation using a simple CNN. The viewpoint estimation results are evaluated based on the new accuracy calculation formula.
- (4)
- We use the viewpoint estimation method to analyze the chair display angles on a furniture website, illustrating the display angle preferences of merchants displaying items.
2. Related Work
2.1. Rule-Based Methods
2.2. Machine Learning-Based Methods
2.3. Evaluation
3. Methods
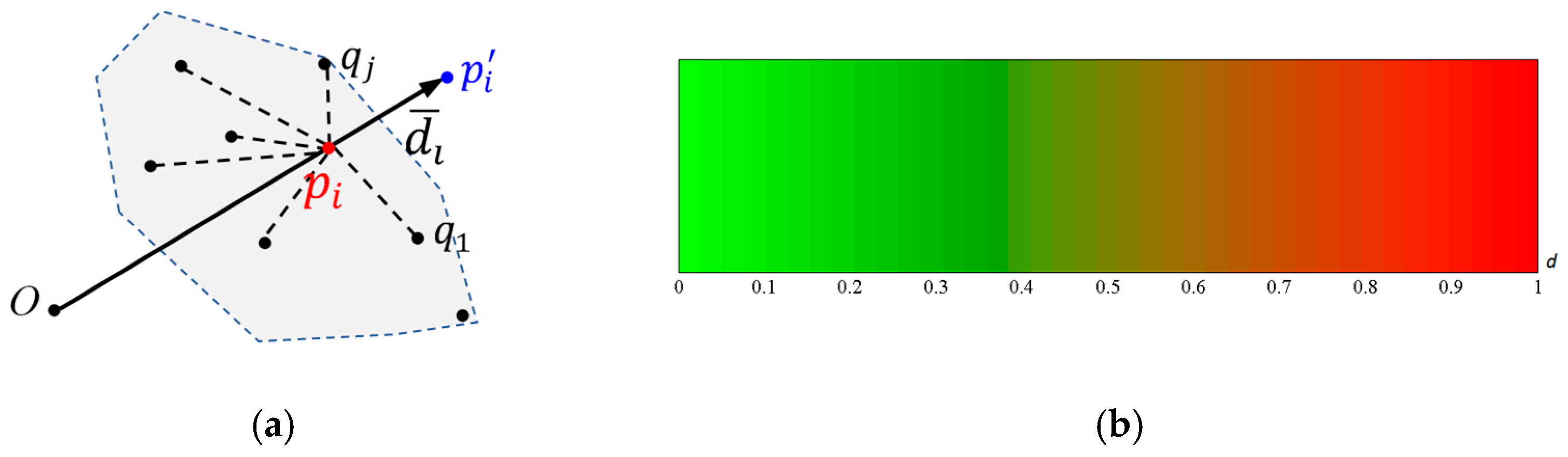
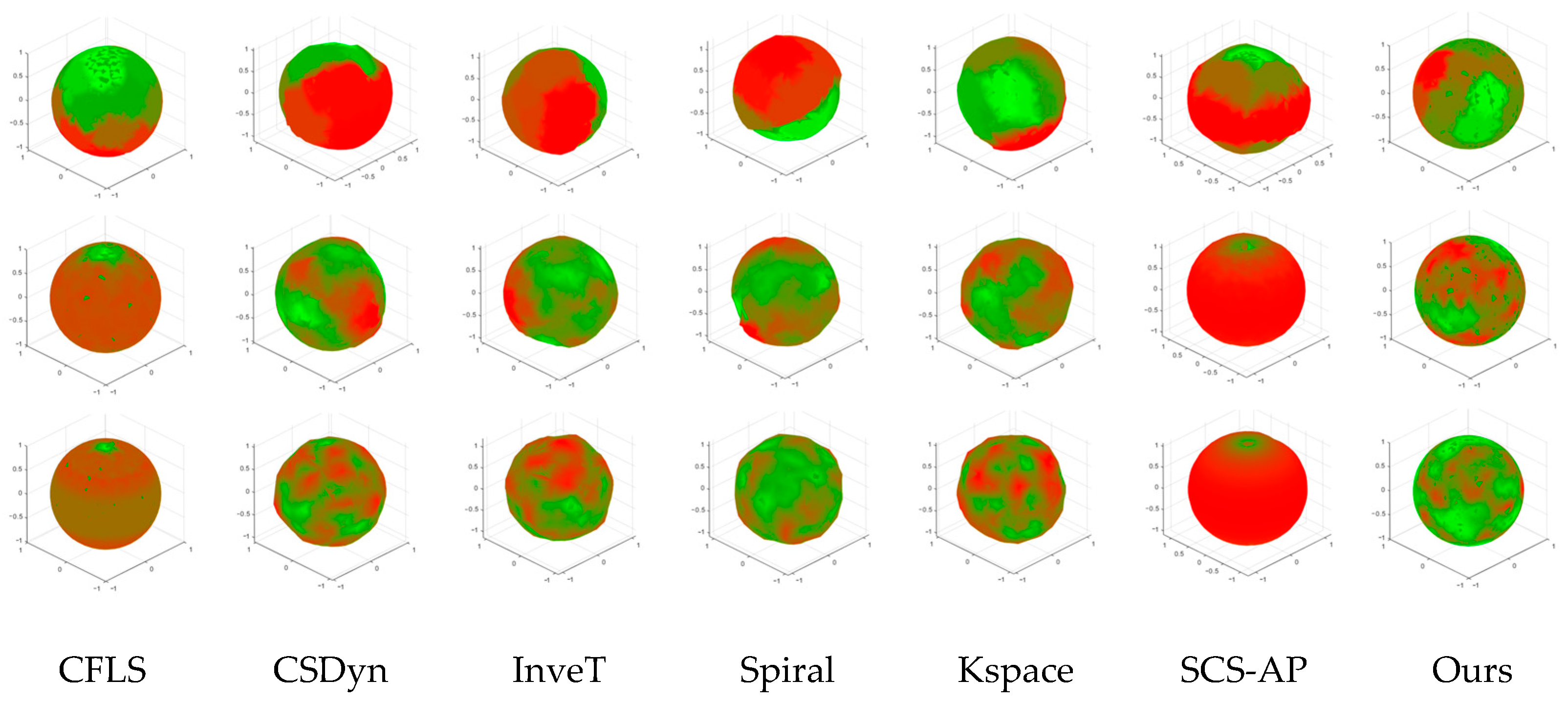
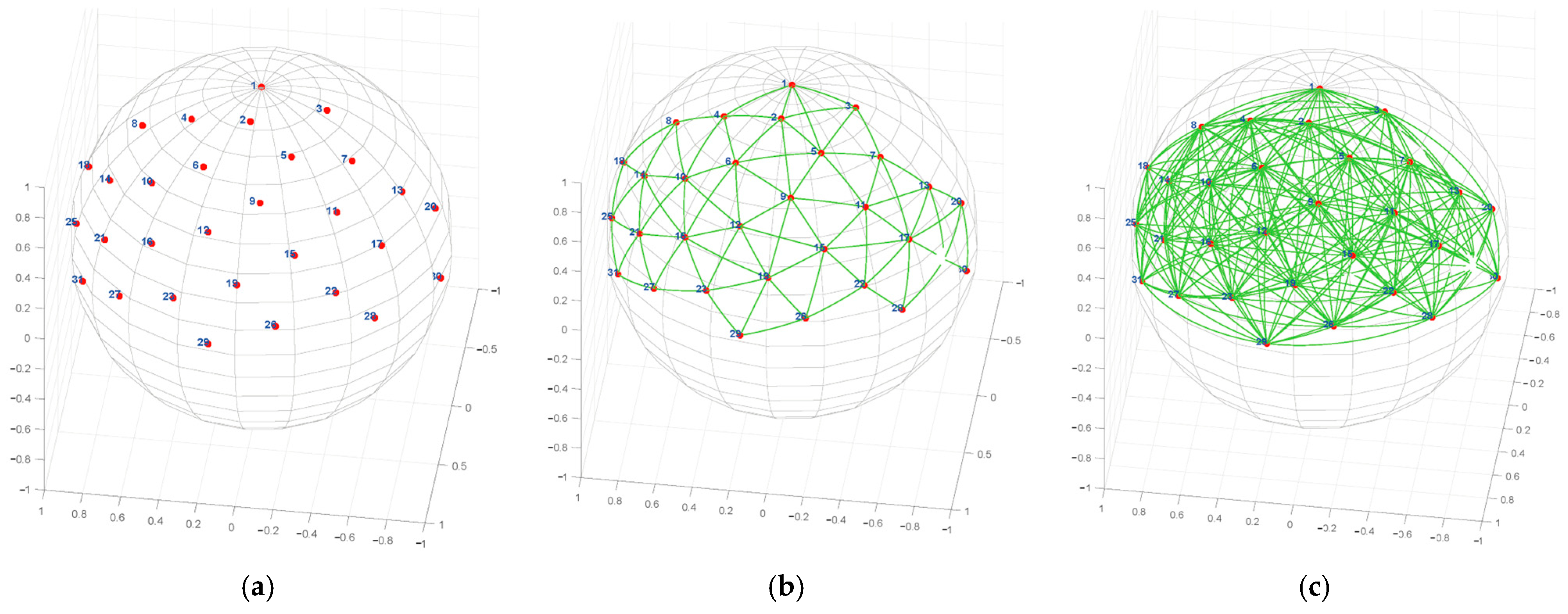
3.1. Uniform Sampling on a Unit Sphere
| Algorithm 1: FSUS-RR |
| Input: N, //The number of sampling points, //The number of iterations Output: //the coordinates of N points on the unit sphere 1: //for steps 1 through 6, use the CFLS method [33] 2: for 3: 4: 5: 6: end 7: flag = 1; 8: for 9: Build using all sampling points 10: Calculating using Equation (1) 11: for j from 1 to N 12: if flag == 1, then 13: 14: else 15: is a random unit vector 16: end 17: //Update the position of 18: flag = 1-flag 19: //In terms of vector units 20: end 21: end 22: Output the sampling points |
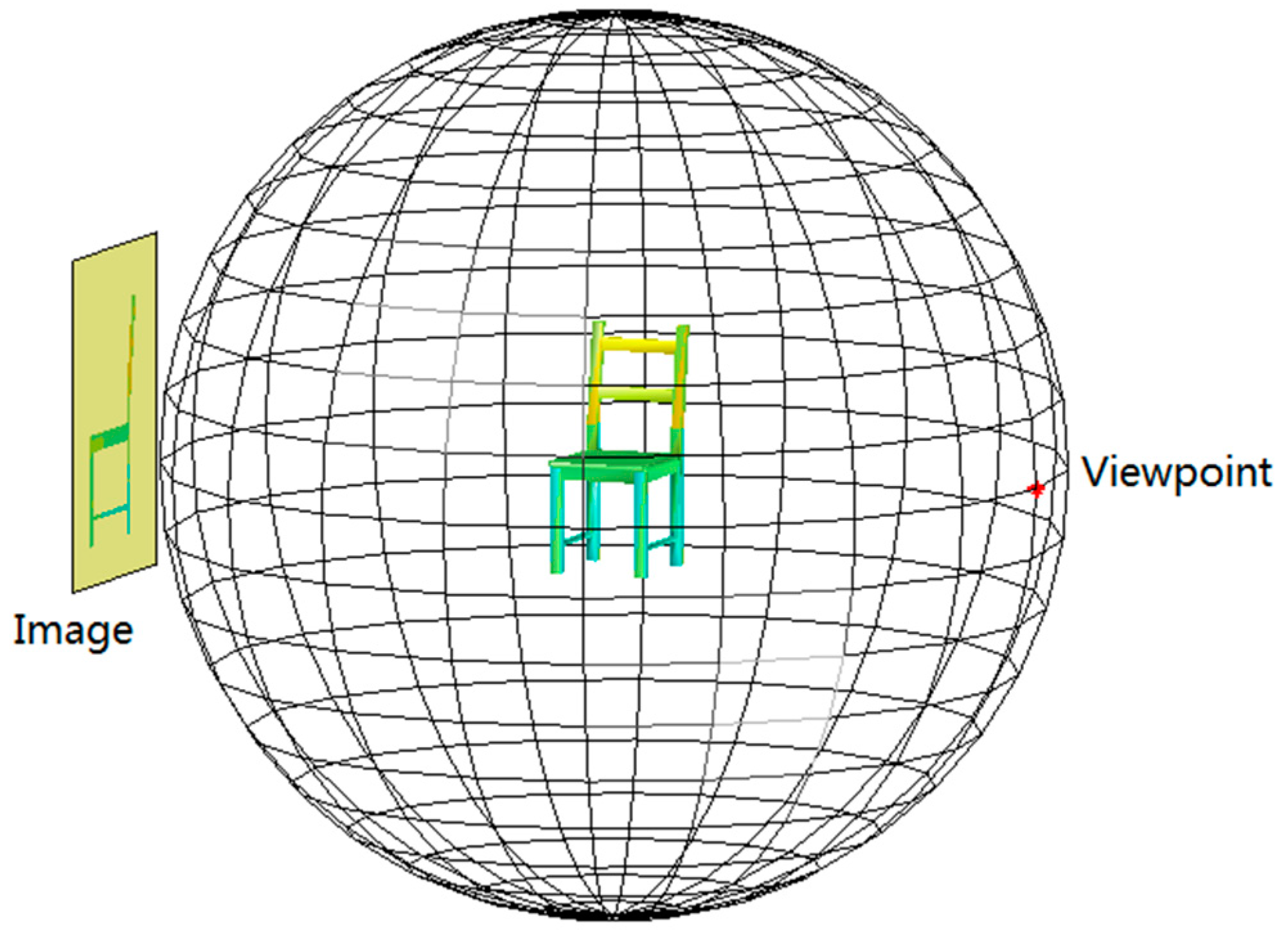
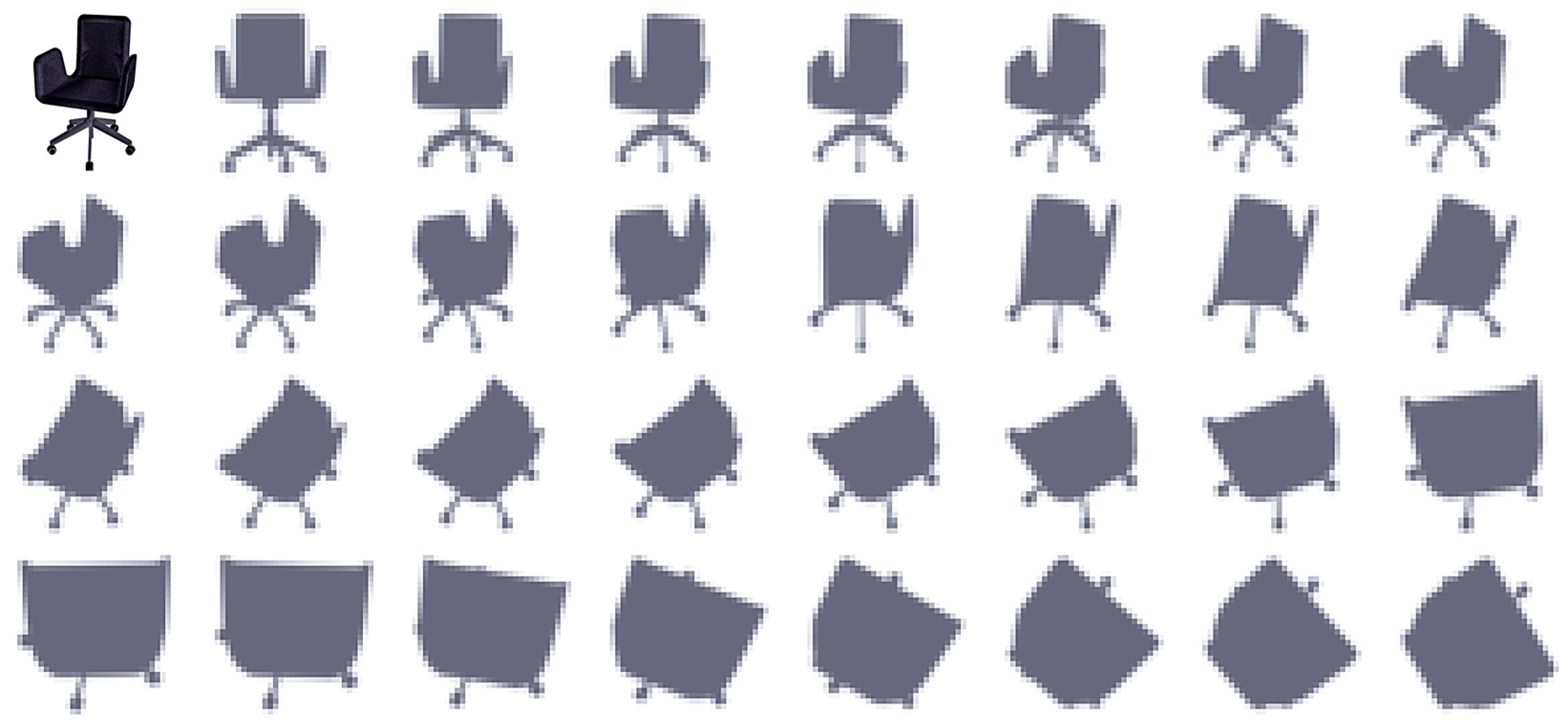
3.2. Image Generated According to Viewpoints
| Algorithm 2: Generating images according to specified viewpoints |
| Input: , //rang , //rang , //The minimum distance between neighboring viewpoints .//The size of the output image Output: //images with labeled viewpoints 1: Generate viewpoints using Algorithm 1; 2: Remove viewpoints that are not within the specified ranges; 3: Remove neighboring viewpoints with distances less than ; 4: Generate a projection image for each viewpoint using Equation (7); 5: Construct the AABB (Axially Aligned Bounding Box) of the object projection image, and cut off the external redundant margins which are out of the AABB; 6: Enlarge or reduce the image to the specified size (e.g., ); 7: Output to a folder. |
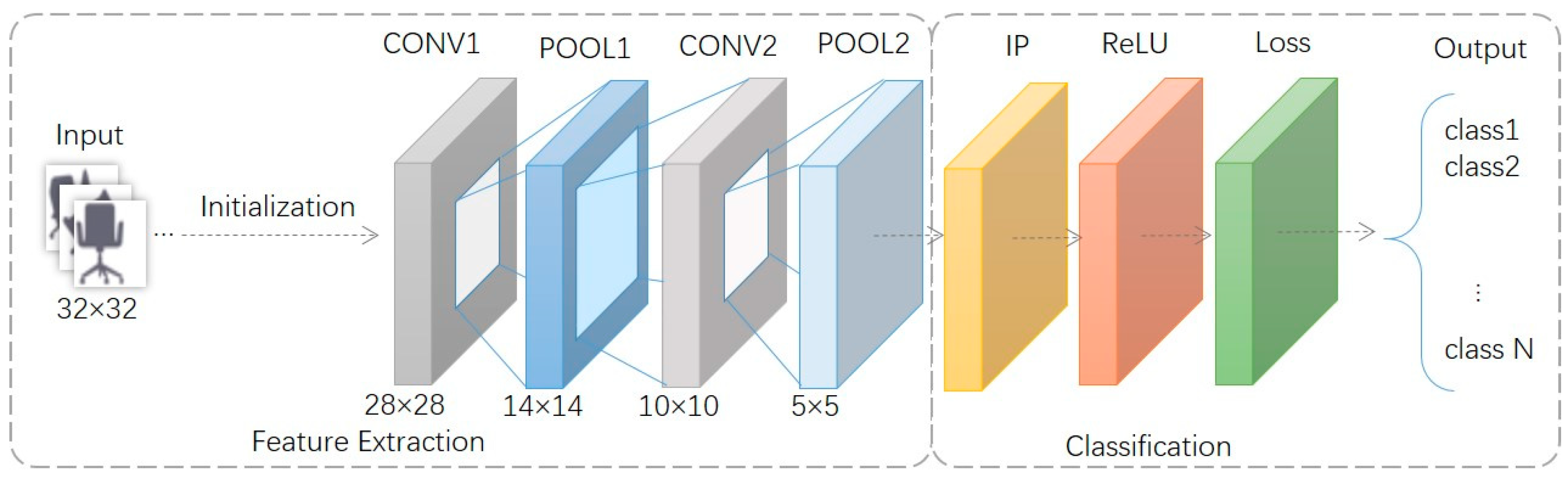
3.3. Viewpoint Estimated Using CNN
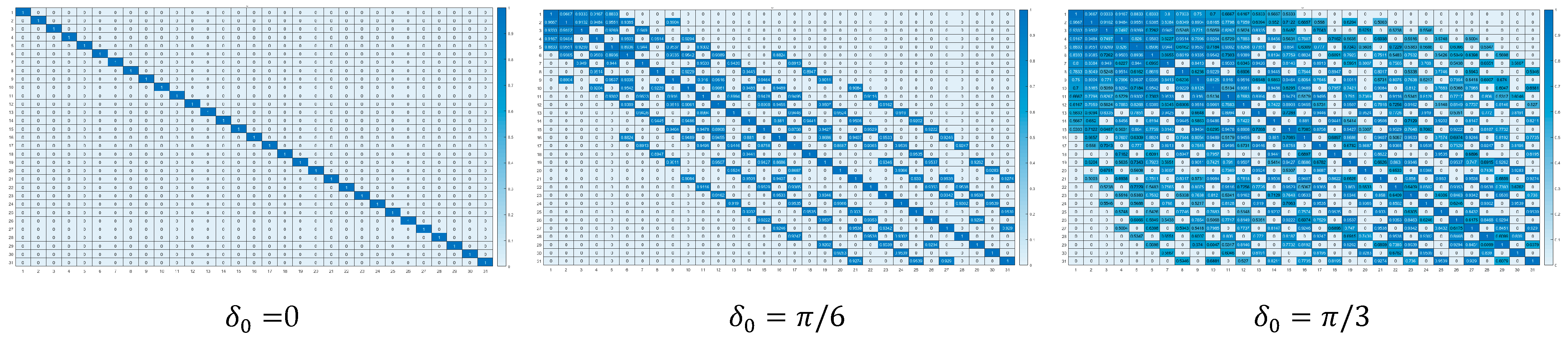
3.4. Accuracy Evaluation of Estimated Viewpoint
4. Experiment
4.1. Dataset
4.2. Parameter Analysis and Comparisons
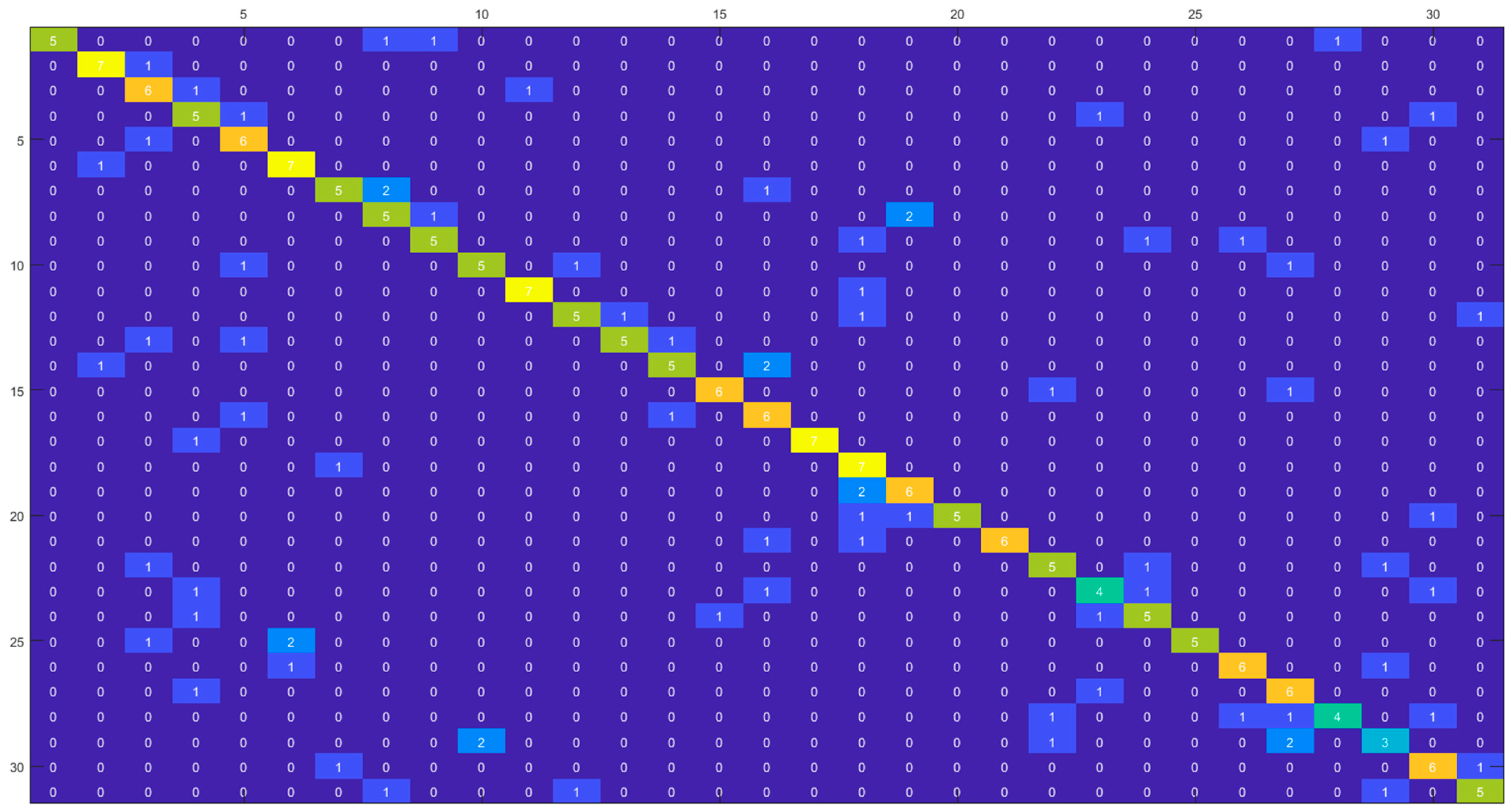
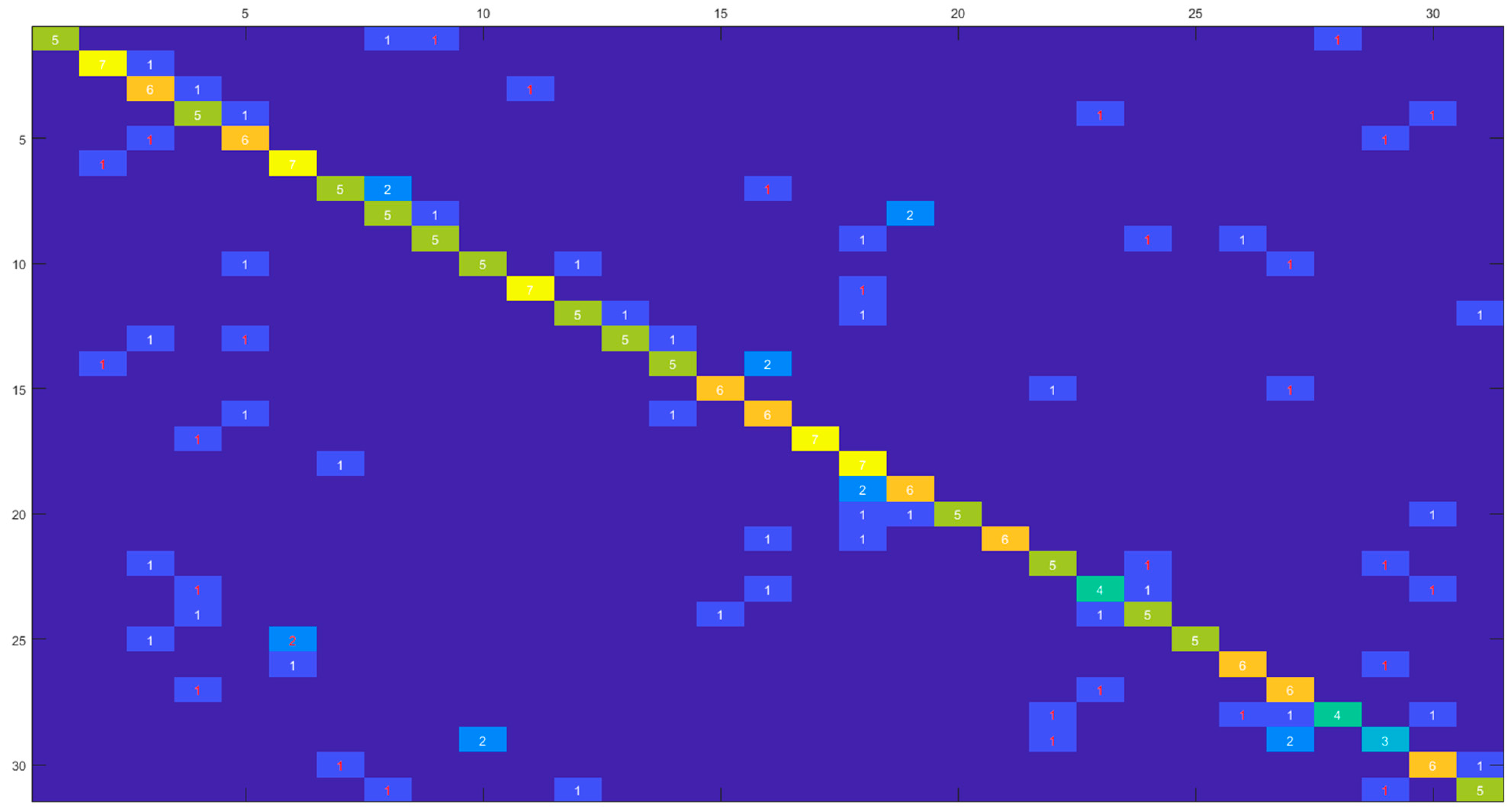
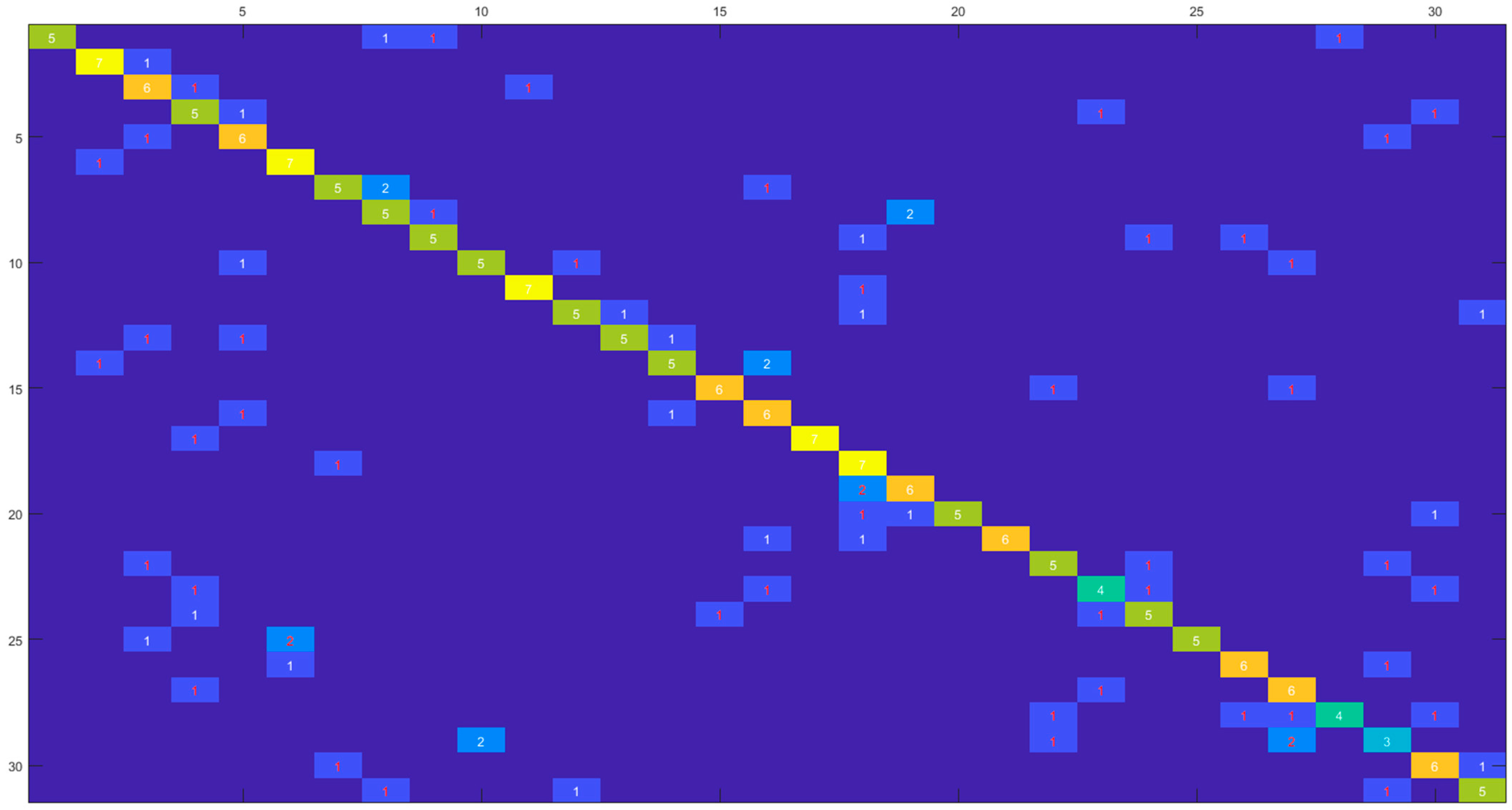
4.3. Viewpoint Estimation Results
4.4. Application to Display Image Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, Y.; Fei, G.; Yang, G. 3D Viewpoint Estimation Based on Aesthetics. IEEE Access 2020, 8, 108602–108621. [Google Scholar] [CrossRef]
- Busto, P.P.; Gall, J. Viewpoint Refinement and Estimation with Adapted Synthetic Data. Comput. Vis. Image Underst. 2018, 169, 75–89. [Google Scholar] [CrossRef]
- Xiao, Y.; Lepetit, V.; Marlet, R. Few-shot Object Detection and Viewpoint Estimation for Objects in the Wild. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 45, 3090–3106. [Google Scholar] [CrossRef] [PubMed]
- Kucerova, J.; Varhanikova, I.; Cernekova, Z. Best View Methods Suitability for Different Types of Objects. In Proceedings of the Spring Conference on Computer Graphics, Smolenice, Slovakia, 2–4 May 2012; pp. 55–61. [Google Scholar] [CrossRef]
- Sweet, G.; Ware, C. View Direction, Surface Orientation and Texture Orientation for Perception of Surface Shape. In Proceedings of the Graphics Interface Conference, London, ON, Canada, 17–19 May 2004; DBLP: London, ON, Canada, 2004. [Google Scholar] [CrossRef]
- Li, T.; Yang, L.; Wang, M.; Fan, Y.; Zhang, F.; Guo, S.; Chang, J.; Zhang, J.J. Visual Saliency-Based Bas-Relief Generation with Symmetry Composition Rule. Comput. Animat. Virtual Worlds 2018, 29, e1815. [Google Scholar] [CrossRef]
- Zhou, W.; Jia, J. Training Deep Convolutional Neural Networks to Acquire the Best View of a 3D Shape. Multimedia Tools Appl. 2020, 79, 581–601. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, L.; Huang, H. Web-image driven best views of 3D shapes. Vis. Comput. 2012, 28, 279–287. [Google Scholar] [CrossRef]
- Collander, C.; Beksi, W.J.; Huber, M. Learning the Next Best View for 3D Point Clouds via Topological Features. arXiv 2021. [Google Scholar] [CrossRef]
- Ghezelghieh, M.F.; Kasturi, R.; Sarkar, S. Learning Camera Viewpoint Using CNN to Improve 3D Body Pose Estimation. In Proceedings of the 2016 Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016; IEEE: Stanford, CA, USA, 2016. [Google Scholar] [CrossRef]
- He, J.; Zhou, W.; Wang, L.; Zhang, H.; Guo, Y. Viewpoint Selection for Taking a Good Photograph of Architecture. Eurographics Assoc. 2016, 39–44. [Google Scholar] [CrossRef]
- Abdulwahab, S.; Rashwan, H.A.; García, M.Á.; Jabreel, M.; Chambon, S.; Puig, D. Adversarial Learning for Depth and Viewpoint Estimation from a Single Image. IEEE Trans. Circuits Syst. Video Technol. 2020, 30, 2947–2958. [Google Scholar] [CrossRef]
- Sun, X.; Lian, Z. EasyMesh: An Efficient Method to Reconstruct 3D Mesh from a Single Image. Comput. Aided Geom. Des. 2020, 80, 101862. [Google Scholar] [CrossRef]
- Shi, N.; Tao, Y. CNNs-Based Viewpoint Estimation for Volume Visualization. ACM Trans. Intell. Syst. Technol. 2019, 10, 27. [Google Scholar] [CrossRef]
- Mustikovela, S.K.; Jampani, V.; Mello, S.D.; Liu, S.; Iqbal, U.; Rother, C.; Kautz, J. Self-Supervised Viewpoint Learning from Image Collections. In Proceedings of the Computer Vision and Pattern Recognition, Seattle, WA, USA, 16–18 June 2020; IEEE: Seattle, WA, USA, 2020. [Google Scholar] [CrossRef]
- Gu, C.; Lu, C.; Gu, C.; Guan, X. Viewpoint Estimation Using Triplet Loss with a Novel Viewpoint-Based Input Selection Strategy. J. Phys. Conf. Ser. 2019, 1207, 012009. [Google Scholar] [CrossRef]
- Kim, Y.; Hyunwoo, H.; Kim, Y.; Surh, J.; Ha, H.; Oh, T.H. MeTTA: Single-View to 3D Textured Mesh Reconstruction with Test-Time Adaptation. In Proceedings of the 35th British Machine Vision Conference 2024, {BMVC} 2024, Glasgow, UK, 25–28 November 2024; poster. Available online: https://bmva-archive.org.uk/bmvc/2024/papers/Paper_18/paper.pdf (accessed on 12 February 2025).
- Takamatsu, R.; Takada, Y.; Sato, M. Viewpoint Estimation Based on Moment Feature. J. Inst. Image Inf. Telev. Eng. 1997, 51, 1262–1269. [Google Scholar] [CrossRef]
- Zhao, L.; Liang, S.; Jia, J.; Wei, Y. Learning Best Views of 3D Shapes from Sketch Contour. Vis. Comput. 2015, 31, 765–774. [Google Scholar] [CrossRef]
- Sanchiz, J.M.; Fisher, R.B. Viewpoint Estimation in Three-Dimensional Images Taken with Perspective Range Sensors. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1324–1329. [Google Scholar] [CrossRef]
- Sandro, C.; António, P.; Filipe, N.; Jorge, D. BVE + EKF: A Viewpoint Estimator for the Estimation of the Object’s Position in the 3D Task Space using Extended Kalman Filters. In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics—Volume 2: ICINCO, Porto, Portugal, 18–20 November 2024; SciTePress: Porto, Portugal, 2024; pp. 157–165. [Google Scholar] [CrossRef]
- Mariotti, O.; Bilen, H. Semi-Supervised Viewpoint Estimation with Geometry-Aware Conditional Generation. In Computer Vision—ECCV 2020 Workshops; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2020; Volume 12536. [Google Scholar] [CrossRef]
- Divon, G.; Tal, A. Viewpoint Estimation—Insights and Model. In Computer Vision—ECCV 2018. ECCV 2018; Lecture Notes in Computer Science; Ferrari, V., Hebert, M., Sminchisescu, C., Weiss, Y., Eds.; Springer: Cham, Switzerland, 2018; Volume 11218, pp. 265–281. [Google Scholar] [CrossRef]
- Dutta, S.; Rauhut, M.; Hagen, H.; Gospodnetić, P. Automatic Viewpoint Estimation for Inspection Planning Purposes. In Proceedings of the 2021 International Conference on Image Processing and Computer Vision, Anchorage, AK, USA, 19–22 September 2021; Springer: Cham, Switzerland, 2021. [Google Scholar] [CrossRef]
- Joung, S.; Kim, S.; Kim, H.; Kim, M.; Kim, I.-J.; Cho, J.; Sohn, K. Cylindrical Convolutional Networks for Joint Object Detection and Viewpoint Estimation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 16–18 June 2020. [Google Scholar] [CrossRef]
- Su, H.; Qi, C.R.; Li, Y.; Guibas, L.J. Render for CNN: Viewpoint Estimation in Images Using CNNs Trained with Rendered 3D Model Views. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; IEEE: Santiago, Chile, 2015. [Google Scholar] [CrossRef]
- Wang, Y.; Li, S.; Jia, M.; Liang, W. Viewpoint Estimation for Objects with Convolutional Neural Network Trained on Synthetic Images. In Proceedings of the 2016 International Conference on Artificial Intelligence and Pattern Recognition, Lodz, Poland, 19–21 September 2016; Springer: Cham, Switzerland, 2016. [Google Scholar] [CrossRef]
- Meng, M.; Zhou, Y.; Tan, C.; Zhou, Z. Viewpoint Quality Evaluation for Augmented Virtual Environment. In Proceedings of the Pacific-Rim Conference on Multimedia, Hefei, China, 21–22 September 2018. [Google Scholar]
- Dutagaci, H.; Cheung, C.P.; Godil, A. A Benchmark for Best View Selection of 3D Objects. In Proceedings of the 3DOR’10 Conference, Firenze, Italy, 25 October 2010. [Google Scholar]
- Zhang, F.; Li, M.; Wang, X.; Wang, M.; Tang, Q. 3D Scene Viewpoint Selection Based on Chaos-Particle Swarm Optimization. In Proceedings of the Chinese CHI 2019 Conference, Xiamen, China, 27–30 June 2019. [Google Scholar] [CrossRef]
- Stewart, E.E.M.; Hartmann, F.; Fleming, R. Viewpoint Similarity of 3D Objects Predicted by Image-Plane Position Shifts. J. Vis. 2022, 22, 3886. [Google Scholar] [CrossRef]
- Zhang, L.-J.; Gu, C.-C.; Wu, K.-J.; Huang, Y.; Guan, X.-P. Model-Based Active Viewpoint Transfer for Purposive Perception. In Proceedings of the 2017 13th IEEE Conference on Automation Science and Engineering (CASE), Xi’an, China, 20–23 August 2017; pp. 1085–1089. [Google Scholar] [CrossRef]
- Roberts, M. How to Evenly Distribute Points on a Sphere More Effectively than the Canonical Fibonacci Lattice. Extreme Learning Blog. 29 January 2024. Available online: https://extremelearning.com.au/how-to-evenly-distribute-points-on-a-sphere-more-effectively-than-the-canonical-fibonacci-lattice/ (accessed on 24 May 2024).
- Leimkuhler, B.; Stoltz, G. Sampling Techniques for Computational Statistical Physics. In Encyclopedia of Applied and Computational Mathematics; Springer: Berlin/Heidelberg, Germany, 2015; pp. 1287–1292. [Google Scholar] [CrossRef]
- Koay, C.G. Analytically Exact Spiral Scheme for Generating Uniformly Distributed Points on the Unit Sphere. J. Comput. Sci. 2011, 2, 88–91. [Google Scholar] [CrossRef] [PubMed]
- Wong, S.T.S.; Roos, M.S. A Strategy for Sampling on a Sphere Applied to 3D Selective RF Pulse Design. Magn. Reson. Med. 1994, 32, 778–784. [Google Scholar] [CrossRef] [PubMed]
- LeCun, Y.; Bottou, L. Gradient-Based Learning Applied to Document Recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Lim, J.J.; Pirsiavash, H.; Torralba, A. Parsing IKEA Objects: Fine Pose Estimation. In Proceedings of the 2013 IEEE International Conference on Computer Vision (ICCV), Sydney, Australia, 1–8 December 2014; IEEE: Sydney, Australia, 2014. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Statistical Feature | Geometric Feature |
|---|---|---|
| [2] | HOG, CNN feature vector | -- |
| [18] | Moments | Gravity center and breadth |
| [19] | Histogram of features | Contour |
| [20] | Step ray; unbiased distance estimator | Central-projection analysis |
| [21] | A statistical optimization | Rotation matrix |
| Reference | Method | Gen. Data | Model |
|---|---|---|---|
| [14] | 19-layer VGGNet, based on AlexNet | Y | Fish, head, tree, etc. |
| [22] | Semi-supervised, simple CNN | Y | Airplane, car, and chair |
| [24] | Self-supervised, Rectification Network | Y | Duck, cat, iron, etc. |
| [26] | A CNN with shared lower layers | Y | Bus, car, chair, etc. |
| [27] | R-CNN model | Y | Airplane, boat, and car |
| Methods | minAveD | maxAveD | Range | stdAveD | UniHks | UniP | NrmHks | NrmP | Time |
|---|---|---|---|---|---|---|---|---|---|
| CFLS | 1.0441 | 1.1311 | 0.0869 | 0.0261 | 0 | 0.7773 | 0 | 0.8557 | 0.0010 |
| CSDyn | 0.8286 | 1.2514 | 0.4228 | 0.1235 | 0 | 0.0683 | 0 | 0.3685 | 0.0159 |
| InveT | 0.8720 | 1.2764 | 0.4043 | 0.1019 | 0 | 0.2367 | 0 | 0.8364 | 0.0008 |
| Spiral | 0.8517 | 1.2752 | 0.4236 | 0.1319 | 0 | 0.2589 | 0 | 0.3715 | 0.0014 |
| Kspace | 0.9118 | 1.2297 | 0.3178 | 0.0922 | 1 | 0.0334 | 0 | 0.7959 | 0.0152 |
| SCS-AP | 0.7784 | 1.3215 | 0.5431 | 0.1883 | 1 | 0.0004 | 0 | 0.0981 | 0.0009 |
| Ours | 1.0149 | 1.0439 | 0.0290 | 0.0073 | 0 | 0.4686 | 0 | 0.9375 | 0.0693 |
| Method | minAveD | maxAveD | Range | stdAveD | UniHks | UniP | NrmHks | NrmP | Time |
|---|---|---|---|---|---|---|---|---|---|
| CFLS | 0.3297 | 0.3585 | 0.0287 | 0.0029 | 1 | 0.0000 | 1 | 0.0000 | 0.0010 |
| CSDyn | 0.2480 | 0.4877 | 0.2397 | 0.0464 | 1 | 0.0000 | 0 | 0.2444 | 0.8326 |
| InveT | 0.1933 | 0.5313 | 0.3380 | 0.0562 | 1 | 0.0000 | 0 | 0.2507 | 0.0008 |
| Spiral | 0.2039 | 0.4757 | 0.2719 | 0.0522 | 1 | 0.0000 | 0 | 0.9607 | 0.0044 |
| Kspace | 0.2323 | 0.4702 | 0.2379 | 0.0419 | 1 | 0.0000 | 0 | 0.6081 | 0.0003 |
| SCS-AP | 0.0000 | 0.4435 | 0.4435 | 0.1392 | 1 | 0.0000 | 1 | 0.0000 | 0.0009 |
| Ours | 0.3207 | 0.3381 | 0.0174 | 0.0033 | 1 | 0.0000 | 0 | 0.9953 | 2.1910 |
| Method | minAveD | maxAveD | Range | stdAveD | UniHks | UniP | NrmHks | NrmP | Time |
|---|---|---|---|---|---|---|---|---|---|
| CFLS | 0.1738 | 0.1891 | 0.0154 | 0.0011 | 1 | 0.0000 | 1 | 0.0000 | 0.0014 |
| CSDyn | 0.1220 | 0.2449 | 0.1229 | 0.0210 | 1 | 0.0000 | 0 | 0.8633 | 10.3144 |
| InveT | 0.0799 | 0.2852 | 0.2053 | 0.0301 | 1 | 0.0000 | 0 | 0.2412 | 0.0010 |
| Spiral | 0.0984 | 0.2966 | 0.1983 | 0.0296 | 1 | 0.0000 | 1 | 0.0027 | 0.0015 |
| Kspace | 0.1024 | 0.2589 | 0.1565 | 0.0272 | 1 | 0.0000 | 0 | 0.8009 | 0.0013 |
| SCS-AP | 0.0000 | 0.2329 | 0.2329 | 0.0643 | 1 | 0.0000 | 1 | 0.0000 | 0.0011 |
| Ours | 0.1680 | 0.1840 | 0.0160 | 0.0027 | 1 | 0.0000 | 0 | 0.3879 | 3.7868 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, M.; Li, H. Optimal View Estimation Algorithm and Evaluation with Deviation Angle Analysis. Algorithms 2025, 18, 224. https://doi.org/10.3390/a18040224
Yuan M, Li H. Optimal View Estimation Algorithm and Evaluation with Deviation Angle Analysis. Algorithms. 2025; 18(4):224. https://doi.org/10.3390/a18040224
Chicago/Turabian StyleYuan, Meng, and Hongjun Li. 2025. "Optimal View Estimation Algorithm and Evaluation with Deviation Angle Analysis" Algorithms 18, no. 4: 224. https://doi.org/10.3390/a18040224
APA StyleYuan, M., & Li, H. (2025). Optimal View Estimation Algorithm and Evaluation with Deviation Angle Analysis. Algorithms, 18(4), 224. https://doi.org/10.3390/a18040224