
An Optimal Scheduling Model for Connected Automated Vehicles at an Unsignalized Intersection




Abstract
1. Introduction
1.1. Research Background
1.2. Literature Review
1.3. Main Contributions
1.4. The Structure of This Paper
2. Modeling Preparation
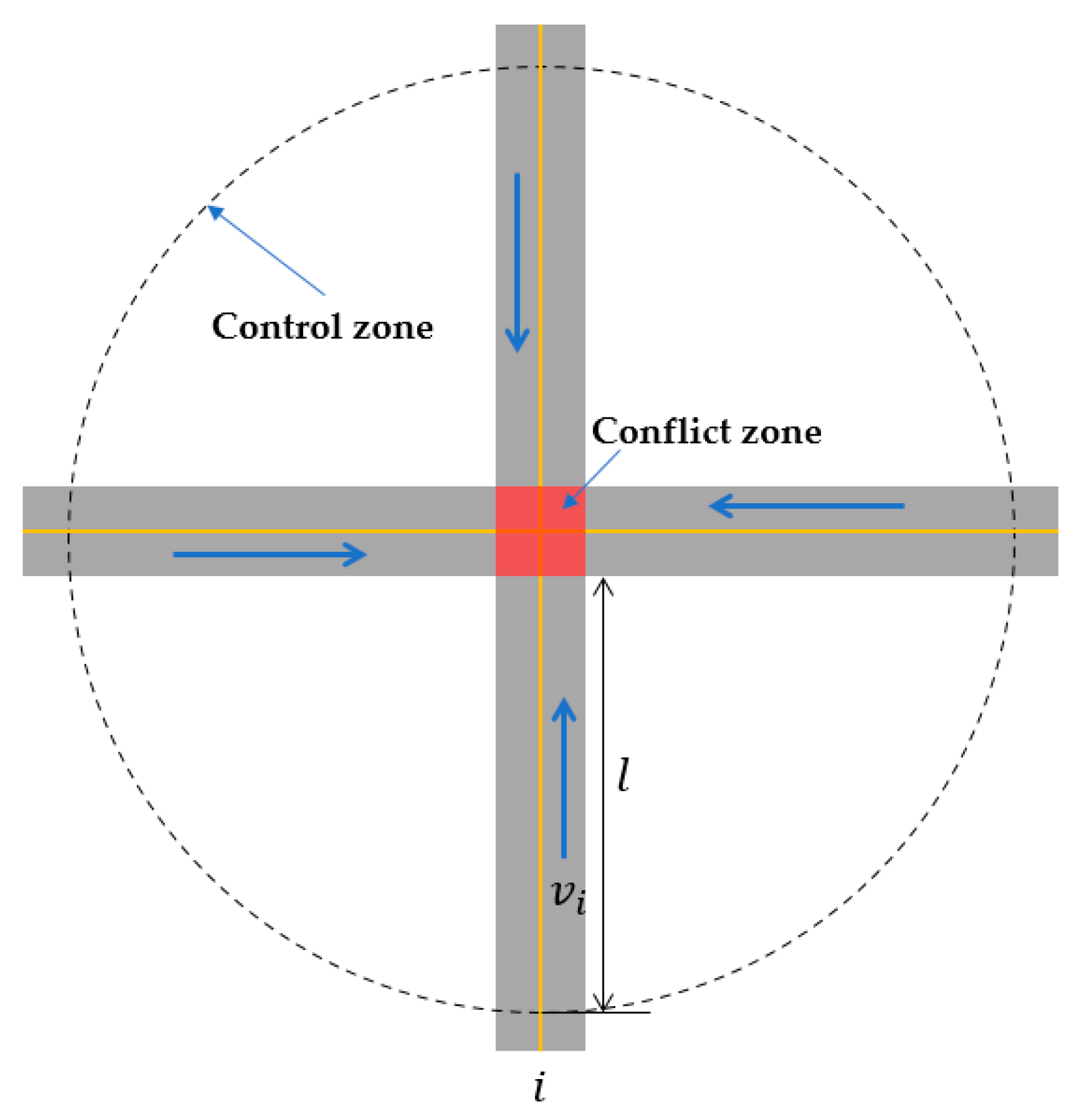
2.1. Problem Description
2.2. Problem Analysis
3. Methodology
3.1. Timing Optimization Model
3.1.1. Decision Variables
3.1.2. Objective Function
3.1.3. Constraints
3.2. Solving Algorithm
3.2.1. Algorithm Analysis
3.2.2. Algorithm Process
4. Numerical Experiment
4.1. Parameter Setting
4.2. Result Analysis
4.3. Sensitive Analysis
4.3.1. Optimized Time Window
4.3.2. Safe Headway
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qin, Y.; Luo, Q.; Xiao, T.; He, Z. Modeling the mixed traffic capacity of minor roads at a priority intersection. Phys. A Stat. Mech. Its Appl. 2024, 636, 129541. [Google Scholar]
- Zong, F.; Yue, S. Carbon emission impacts of longitudinal disturbance on low-penetration connected automated vehicle Environments. Transp. Res. Part D Transp. Environ. 2023, 94, 103911. [Google Scholar]
- Li, J.; Yang, H.; Cheng, R.; Zheng, P.; Wu, B. A dynamic temporal and spatial speed control strategy for partially connected automated vehicles at a signalized arterial. Phys. A Stat. Mech. Its Appl. 2024, 653, 130099. [Google Scholar]
- Xu, H.; Cassandras, C.G.; Li, L.; Zhang, Y. Comparison of cooperative driving strategies for CAVs at signal-free intersections. IEEE Trans. Intell. Transp. Syst. 2021, 23, 7614–7627. [Google Scholar]
- Peng, J.; Shangguan, W.; Peng, C.; Chai, L. Uncertainty modeling of connected and automated vehicle penetration rate under mixed traffic environment. Phys. A Stat. Mech. Its Appl. 2024, 639, 129640. [Google Scholar]
- Liu, H.; Yuan, T.; Zeng, X.; Guo, K.; Wang, Y.; Mo, Y.; Xu, H. Eco-driving strategy for connected automated vehicles in mixed traffic flow. Phys. A Stat. Mech. Its Appl. 2024, 633, 129388. [Google Scholar]
- Zheng, Y.; Zhang, Y.; Qu, X.; Li, S.; Ran, B. Developing platooning systems of connected and automated vehicles with guaranteed stability and robustness against degradation due to communication disruption. Transp. Res. Part C Emerg. Technol. 2024, 168, 104768. [Google Scholar]
- Zeng, J.; Qian, Y.; Wang, W.; Xu, D.; Li, H. The impact of connected automated vehicles and platoons on the traffic safety and stability in complex heterogeneous traffic systems. Phys. A Stat. Mech. its Appl. 2023, 629, 129195. [Google Scholar]
- Mahmassani, H.S. 50th anniversary invited article—Autonomous vehicles and connected vehicle systems: Flow and operations considerations. Transp. Sci. 2016, 50, 1140–1162. [Google Scholar]
- Ma, K.; Wang, H.; Ruan, T. Analysis of road capacity and pollutant emissions: Impacts of connected and automated vehicle platoons on traffic flow. Phys. A Stat. Mech. Its Appl. 2021, 583, 126301. [Google Scholar]
- Cheng, R.; Ji, Q.; Zheng, Y.; Ge, H. Analysis of the impact of cyberattacks on the lane changing behavior of connected automated vehicles. Phys. A Stat. Mech. Its Appl. 2023, 632, 129333. [Google Scholar] [CrossRef]
- Zheng, S.; Liu, Y.; Fu, K.; Li, R.; Zhang, Y.; Yang, H. Optimization of isolated intersection signal timing and trajectory planning under mixed traffic environment: The flexible catalysis of connected and automated vehicles. Phys. A Stat. Mech. Its Appl. 2024, 640, 129668. [Google Scholar] [CrossRef]
- Jiang, H.; Yao, Z.; Zhang, Y.; Jiang, Y.; He, Z. Pedestrian shuttle service optimization for autonomous intersection management. Transp. Res. Part C Emerg. Technol. 2024, 163, 104623. [Google Scholar] [CrossRef]
- Jiang, H.; Yao, Z.; Jiang, Y.; He, Z. Is all-direction turn lane a good choice for autonomous intersections? a study of method development and comparisons. IEEE Trans. Veh. Technol. 2023, 72, 8510–8525. [Google Scholar]
- Wang, S.; Mahlberg, A.; Levin, M. Optimal control of automated vehicles for autonomous intersection management with design specifications. Transp. Res. Rec. 2023, 2677, 1643–1658. [Google Scholar] [CrossRef]
- Huang, X.; Wang, H.; Li, Y.; Huang, L.; Zhao, H. Reservation-based traffic signal control for mixed traffic flow at intersections. Phys. A Stat. Mech. Its Appl. 2024, 633, 129426. [Google Scholar] [CrossRef]
- Yao, Z.; Shen, L.; Liu, R.; Jiang, Y.; Yang, X. A dynamic predictive traffic signal control framework in a cross-sectional vehicle infrastructure integration environment. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1455–1466. [Google Scholar] [CrossRef]
- Yao, Z.; Jin, Y.; Jiang, H.; Hu, L.; Jiang, Y. CTM-based traffic signal optimization of mixed traffic flow with connected automated vehicles and human-driven vehicles. Phys. A Stat. Mech. Its Appl. 2022, 603, 127708. [Google Scholar]
- Mirchandani, P.; Head, L. A real-time traffic signal control system: Architecture, algorithms, and analysis. Transp. Res. Part C Emerg. Technol. 2001, 9, 415–432. [Google Scholar] [CrossRef]
- Feng, Y.; Head, K.L.; Khoshmagham, S.; Zamanipour, M. A real-time adaptive signal control in a connected vehicle environment. Transp. Res. Part C Emerg. Technol. 2015, 55, 460–473. [Google Scholar] [CrossRef]
- Brilon, W.; Wu, N. Capacity at unsignalized intersections derived by conflict technique. Transp. Res. Rec. 2001, 1776, 82–90. [Google Scholar] [CrossRef]
- Heidemann, D.; Wegmann, H. Queueing at unsignalized intersections. Transp. Res. Part B Methodol. 1997, 31, 239–263. [Google Scholar] [CrossRef]
- Krbálek, M.; Hobza, T.; Patočka, M.; Krbálková, M.; Apeltauer, J.; Groverová, N. Statistical aspects of gap-acceptance theory for unsignalized intersection capacity. Phys. A Stat. Mech. Its Appl. 2022, 594, 127043. [Google Scholar]
- Li, Q.L.; Jiang, R.; Wang, B.H. Emergence of bistable states and phase diagrams of traffic flow at an unsignalized intersection. Phys. A Stat. Mech. Its Appl. 2015, 419, 349–355. [Google Scholar]
- Xu, H.; Zhang, Y.; Cassandras, C.G.; Li, L.; Feng, S. A bi-level cooperative driving strategy allowing lane changes. Transp. Res. Part C Emerg. Technol. 2020, 120, 102773. [Google Scholar]
- Xu, Y.H.; Guan, X.K.; Li, L.; Hu, M.B. Selection-sort-based cooperative driving strategy for CAVs at non-signalized intersections. Phys. A Stat. Mech. Its Appl. 2024, 635, 129501. [Google Scholar]
- Dong, S.; Chen, H.; Gao, B.; Guo, L.; Liu, Q. Hierarchical energy-efficient control for CAVs at multiple signalized intersections considering queue effects. IEEE Trans. Intell. Transp. Syst. 2021, 23, 11643–11653. [Google Scholar] [CrossRef]
- Han, X.; Ma, R.; Zhang, H.M. Energy-aware trajectory optimization of CAV platoons through a signalized intersection. Transp. Res. Part C Emerg. Technol. 2020, 118, 102652. [Google Scholar] [CrossRef]
- Amouzadi, M.; Orisatoki, M.O.; Dizqah, A.M. Optimal lane-free crossing of CAVs through intersections. IEEE Trans. Veh. Technol. 2022, 72, 1488–1500. [Google Scholar]
- Soleimaniamiri, S.; Ghiasi, A.; Li, X.; Huang, Z. An analytical optimization approach to the joint trajectory and signal optimization problem for connected automated vehicles. Transp. Res. Part C Emerg. Technol. 2020, 120, 102759. [Google Scholar]
- Guo, Q.; Li, L.; Ban, X.J. Urban traffic signal control with connected and automated vehicles: A survey. Transp. Res. Part C Emerg. Technol. 2019, 101, 313–334. [Google Scholar] [CrossRef]
- Yu, C.; Feng, Y.; Liu, H.X.; Ma, W.; Yang, X. Integrated optimization of traffic signals and vehicle trajectories at isolated urban intersections. Transp. Res. Part B Methodol. 2018, 112, 89–112. [Google Scholar] [CrossRef]
- Qian, G.; Guo, M.; Zhang, L.; Wang, Y.; Hu, S.; Wang, D. Traffic scheduling and control in fully connected and automated networks. Transp. Res. Part C Emerg. Technol. 2021, 126, 103011. [Google Scholar] [CrossRef]
- Liu, W.; Hua, M.; Deng, Z.; Meng, Z.; Huang, Y.; Hu, C.; Song, S.; Gao, L.; Liu, C.; Shuai, B.; et al. A systematic survey of control techniques and applications in connected and automated vehicles. IEEE Internet Things J. 2023, 10, 21892–21916. [Google Scholar] [CrossRef]
- Yao, Z.; Jiang, Y.; Zhao, B.; Luo, X.; Peng, B. A dynamic optimization method for adaptive signal control in a connected vehicle environment. J. Intell. Transp. Syst. 2020, 24, 184–200. [Google Scholar] [CrossRef]
- Yu, C.; Feng, Y.; Liu, H.; Ma, W.; Yang, X. Corridor level cooperative trajectory optimization with connected and automated vehicles. Transp. Res. Part C Emerg. Technol. 2019, 105, 405–421. [Google Scholar] [CrossRef]
- Pei, H.; Feng, S.; Zhang, Y.; Yao, D. A cooperative driving strategy for merging at on-ramps based on dynamic programming. IEEE Trans. Veh. Technol. 2019, 68, 11646–11656. [Google Scholar] [CrossRef]
- Xu, H.; Feng, S.; Zhang, Y.; Li, L. A grouping-based cooperative driving strategy for CAVs merging problems. IEEE Trans. Veh. Technol. 2019, 68, 6125–6136. [Google Scholar] [CrossRef]
- Hang, P.; Lv, C.; Huang, C.; Xing, Y.; Hu, Z. Cooperative decision making of connected automated vehicles at multi-lane merging zone: A coalitional game approach. IEEE Trans. Intell. Transp. Syst. 2021, 23, 3829–3841. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, Y.; Li, L.; Li, W. Cooperative driving at unsignalized intersections using tree search. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4563–4571. [Google Scholar] [CrossRef]
- Wang, Y.; Cai, P.; Lu, G. Cooperative autonomous traffic organization method for connected automated vehicles in multi-intersection road networks. Transp. Res. Part C Emerg. Technol. 2020, 111, 458–476. [Google Scholar]
- Li, P.T.; Zhou, X. Recasting and optimizing intersection automation as a connected-and-automated-vehicle (CAV) scheduling problem: A sequential branch-and-bound search approach in phase-time-traffic hypernetwork. Transp. Res. Part B Methodol. 2017, 105, 479–506. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
| Step 1: | Initialize relevant parameters, such as the total optimization duration , the optimization time window , the free-flow speed of each road segment , the safety time headways and , the current time window index , and the total number of time windows . |
| Step 2: | 2.1: Let , and substitute it into the optimization model. 2.2: An interior point method is adopted to solve the linear programming model (Equations (3)–(8)). 2.3: The optimal for the k-th time window is obtained. |
| Step 3: | Check if . If true, output the optimal solutions for all time windows, which constitute the final optimal solution for the model; otherwise, set and return to Step 2. |
| Variables | Definition | Value |
|---|---|---|
| control area circular radius | 300 m | |
| total optimization duration | 100 s | |
| optimized time window length | 20 s | |
| free-flow speed of road segments | 15 m/s | |
| safe headway distance for vehicles traveling in the same direction | 0.5 s | |
| minimum safe time headway for vehicles entering the conflict zone from conflicting directions | 1 s |
| Indices | Traffic Volume (veh/h) | |||
|---|---|---|---|---|
| Direction 1 | Direction 2 | Direction 3 | Direction 4 | |
| 900 | 900 | 1200 | 1200 | |
| 1200 | 1200 | 1200 | 1200 | |
| 1200 | 1200 | 1800 | 1800 | |
| 1800 | 1800 | 1800 | 1800 | |
| Indices | Vehicle Number (veh) | FCFS (s) | RO-Based (s) | Gurobi (s) | |||
|---|---|---|---|---|---|---|---|
| Total Delays | Average Delays | Total Delays | Average Delays | Total Delays | Average Delays | ||
| 1 | 116 | 139.61 | 1.33 | 83.96 | 0.72 | 82.34 | 0.71 |
| 2 | 132 | 325.44 | 2.46 | 129.22 | 0.98 | 125.55 | 0.95 |
| 3 | 166 | 3593.00 | 21.65 | 967.22 | 5.83 | NA | NA |
| 4 | 200 | 5264.33 | 26.32 | 1252 | 6.26 | NA | NA |
| Indices | FCFS (s) | RO-Based (s) | Gurobi (s) | |||
|---|---|---|---|---|---|---|
| Total Time | Average Time | Total Time | Average Time | Total Time | Average Time | |
| 1 | 0.0008 | 0.0005 | 4.66 | 0.35 | 20.66 | 1.28 |
| 2 | 0.0006 | 0.0001 | 8.86 | 2.52 | 102.02 | 56.61 |
| 3 | 0.0024 | 0.0023 | 415.38 | 48.89 | >43,200 | NA |
| 4 | 0.0017 | 0.0021 | 816.77 | 166.72 | >43,200 | NA |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, W.; Fu, C.; Zhao, B.; Li, G.; Yao, Z. An Optimal Scheduling Model for Connected Automated Vehicles at an Unsignalized Intersection. Algorithms 2025, 18, 194. https://doi.org/10.3390/a18040194
Bai W, Fu C, Zhao B, Li G, Yao Z. An Optimal Scheduling Model for Connected Automated Vehicles at an Unsignalized Intersection. Algorithms. 2025; 18(4):194. https://doi.org/10.3390/a18040194
Chicago/Turabian StyleBai, Wei, Chengxin Fu, Bin Zhao, Gen Li, and Zhihong Yao. 2025. "An Optimal Scheduling Model for Connected Automated Vehicles at an Unsignalized Intersection" Algorithms 18, no. 4: 194. https://doi.org/10.3390/a18040194
APA StyleBai, W., Fu, C., Zhao, B., Li, G., & Yao, Z. (2025). An Optimal Scheduling Model for Connected Automated Vehicles at an Unsignalized Intersection. Algorithms, 18(4), 194. https://doi.org/10.3390/a18040194