1. Introduction
Multiobjective programming (MOP) is a vital tool for tackling optimization challenges with multiple conflicting objectives commonly encountered in fields like business, economics, and science (see, for instance, [
1,
2]). By considering multiple objectives simultaneously, MOP aids in making decisions that balance conflicting priorities. Numerous researchers have contributed to the theory and applications of MOP, exploring diverse approaches and settings to address several optimization problems (for instance, see, [
3,
4]).
Convexity is a cornerstone of optimization theory and algorithms ensuring that stationary points are also global minima. Moreover, the satisfaction of the necessary optimality conditions guarantees global optimality. However, many real-world problems are nonconvex. To address this limitation, the convex optimization theory has been significantly enriched by introducing a variety of generalized convex functions. Mangasarian [
5] pioneered the idea of pseudoconvex and pseudoconcave functions as generalizations of convex and concave functions, respectively. De Finetti [
6] was one of the first to recognize some of the characteristics of functions having convex level sets. He did not name this class, but he did note that it includes all convex functions and some nonconvex functions. Fenchel [
7] was one of the early pioneers in formalizing, naming, and developing the class of quasiconvex functions. For a more comprehensive study on convex functions and their role in optimization theory, see [
8,
9,
10].
Nonsmoothness occurs inevitably in many real-life problems arising in various fields, including engineering, science, and numerous other related fields of modern research (see, [
11,
12], and the references mentioned therein). For instance, Ştefănescu et al. [
13] developed a surrogate-based robust design for a non-smooth radiation source detection problem. Antonelli et al. [
14] introduced a total-variation-regularized image segmentation model and discussed the preservation of spatial features in nonsmooth regions. To solve nonlinear complementarity problems, Śmietański [
15] devised nonsmooth gauss-newton algorithms. To tackle the challenges posed by nonsmooth functions in optimization problems, the notion of subdifferentials and generalized derivatives has been developed and thoroughly examined. Clarke [
16] established various theories for nonsmooth analysis and presented subdifferentials for nonsmooth optimization problems. Michel and Penot [
17] introduced a simple way of defining a generalized derivative for arbitrary functions. Mordukhovich and Shao [
18] explored the subdifferentials for extended real-valued functions defined based on Banach spaces. Treiman [
19] introduced a linear generalized gradient that is smaller than the generalized gradients defined by Clarke and Mordukhovich. Demyanov and Jeyakumar [
20] discussed several results of Clarke and Michel–Penot subdifferentials. By extending the concepts of upper convex and lower concave approximations, Demyanov [
21] introduced the notion of convexificators. Jeyakumar and Luc [
22] presented noncompact convexificators and developed a comprehensive calculus for their computation. Convexificators are weaker versions of well-known subdifferentials, such as Clarke [
16], Treiman [
19], Morduchovich-Shao [
18], and Michel-Penot [
17]. In this context, it is important to note that in sharp contrast to various known subdifferentials, convexificators, generally, are not necessarily bounded or convex sets (but are closed sets). In the case of a locally Lipschitz function, the various generalized subdifferentials mentioned above turn out to be convexificators. Furthermore, it is interesting to note that the subdifferentials mentioned above may contain the convex hull of a convexificator (for reference, see, [
22]). In the framework of Banach spaces, Luu [
23,
24] established necessary optimality criteria for MOP involving mixed as well as set constraints via convexificators. Rimpi and Lalitha [
25] employed convexificators to establish constraint qualifications (CQ) for nonsmooth optimization problems with mixed constraints.
Over the last few years, mathematical programming problems with vanishing constraints (MPVC) have gained prominence as a significant area of research (see, [
26,
27,
28]). Achtziger and Kanzow [
29] are considered the pioneers of MPVC, laying the groundwork for its formulation and development. The nomenclature “vanishing constraints” aptly captures a critical feature of these problems. In many real-world applications, certain constraints become inactive for specific feasible solutions within the decision space (see, [
30]). A significant challenge in investigating MPVC is the fact that the feasible set may be non-convex and disconnected, even when all constraint functions are convex (see [
30]).
Hoheisel and Kanzow [
31] made significant contributions to MPVC by deriving necessary optimality criteria for MPVC. Hoheisel and Kanzow [
32] introduced various MPVC-tailored CQs and established interrelationships among them. Later, Hoheisel and Kanzow [
33] investigated Guignard and Abadie CQs for MPVC. Kazemi and Kanzi [
34] introduced various CQs for MPVC with non-differentiable constraints and established several KKT-type stationarity conditions. For nonsmooth MPVC, Kazemi et al. [
35] estimated the Fréchet normal cone of the feasible set and derived corresponding stationarity conditions. Shaker et al. [
36] introduced two new Abadie-type CQ and established the necessary optimality criteria for properly efficient solutions for multiobjective MPVC with non-differentiable convex constraints and continuously differentiable objective functions. Sadeghieh et al. [
37] established first-order necessary and sufficient optimality criteria for an efficient and weakly efficient solution for nonsmooth multiobjective MPVC. Upadhyay and Ghosh [
38] introduced several CQs for MPVC on Hadamard manifolds. Later, Upadhyay et al. [
39] introduced several CQs and established Pareto efficiency criteria for multiobjective MPVC based on Hadamard manifolds. Using convexificators, Hu et al. [
40] introduced CQs and stationary conditions for MPVC involving non-differentiable functions. By leveraging the concept of convexificators, Lai et al. [
41] introduced generalized cottle-type and Guignard-type CQs for nonsmooth semidefinite multiobjective MPVC and derived stationary conditions for the considered problem. Recently, Upadhyay et al. [
42] introduced the concept of convexificators within the context of Hadamard manifolds and employed them to investigate multiobjective MPVC on Hadamard manifolds.
Duality is a fundamental concept in optimization that allows us to view the same optimization problem from a different perspective. In many circumstances, tackling the dual problem is often seen to be more advantageous than addressing the primal problem. Wolfe [
43] and Mond and Weir [
44] introduced two important dual models for differentiable scalar functions, which have subsequently been extended to nonsmooth scalar and multiobjective optimization problems under various generalized convexity and subdifferential assumptions. Mishra et al. [
45] presented Mond–Weir- and Wolfe-type dual models for MPVC. Hu et al. [
46] formulated new Mond–Weir- and Wolfe-type dual models for MPVC, which eliminate the need for index set calculations. Tung [
47] studied Pareto efficiency criteria and various duality results for multiobjective semi-infinite programming problems with vanishing constraints. Recently, in the setting of Hadamard manifolds, for nonsmooth multiobjective semi-infinite programming problems with vanishing constraints, Upadhyay et al. [
48] investigated optimality criteria and formulated dual models.
Robust optimization deals with uncertain data in an optimization problem. Mathematical programming problems often incorporate parameters with inherent uncertainty due to estimation errors, rounding discrepancies, or implementation issues. Robust optimization aims to find solutions that remain optimal even when faced with uncertainties in the problem’s parameters. Generally, robust optimization reformulates the original problem into a deterministic equivalent, called the robust counterpart. This allows us to use the standard optimization algorithms to find solutions that are resilient to these uncertainties. Such problems arise frequently in various areas of modern research (see, for instance, [
49,
50]).
To tackle the barriers posed by the nonsmooth nature of data uncertainty problems, several authors have thoroughly investigated nonsmooth optimization problems with uncertain data under various assumptions. Lee and Lee [
51] established nonsmooth optimality criteria for robust MOP. Fakhar et al. [
52] developed sufficient optimality criteria and dual models for nonsmooth MOP with uncertain data. Chen et al. [
53] introduced two new classes of generalized convex functions, which are not necessarily convex, and established optimality and duality results under the assumptions of generalized convexity for nonsmooth MOP with uncertain data. Recently, Gadhi and Ohda [
54] established necessary optimality conditions for robust nonsmooth MOP. Utilizing convexificators, Chen et al. [
55] deduced weak Pareto efficiency criteria and duality results for nonconvex MOP with uncertain data.
It is worthwhile to mention that the optimality conditions and duality theorems have so far been studied by several researchers for nonsmooth robust optimization problems defined in Euclidean spaces (see, for instance, [
52,
53,
54]). However, to the best of our knowledge, prior work has not addressed problems involving vanishing constraints and data uncertainty. In this paper, our main focus is to primarily tackle the aforementioned research gap. Motivated by the research work presented in [
40,
45,
53,
54], we examine a class of nonsmooth multiobjective programming problems with vanishing constraints under data uncertainty via convexificators. We introduce GS-ACQ for UNMPVC and introduce generalized robust versions of various stationary points, namely RW-stationary, RM-stationary, and RS-stationary points, for UNMPVC. Subsequently, under generalized convexity assumptions, we deduce sufficient optimality conditions for UNMPVC. We further enrich the analysis of the primal problem, UNMPVC, by formulating WRD and MWRD-type dual models. This enables us to derive weak, strong, and strict converse duality relationships between the original problem and its dual model. The importance of results established in this paper is demonstrated through suitable illustrative examples.
The fundamental contributions and novelty of this paper are twofold. At first, we introduce GS-ACQ and robust stationary conditions for UNMPVC, which is employed to extend the optimality conditions derived in [
40] for nonsmooth MPVC to a more general category of optimization problems dealing with data uncertainty. Moreover, we extend the duality theorems established in [
45] for MPVC to a wider class of mathematical programming problems dealing with data uncertainty. Secondly, we generalize the robust optimality and duality results established in [
54,
55] to a broader class of general robust mathematical programming problems incorporating vanishing constraints. To the best of our knowledge, optimality and duality results in terms of convexificators presented in this paper have not been given before.
The present article is structured as follows: we review some fundamental definitions and mathematical concepts in
Section 2. In
Section 3, we introduce GS-ACQ constraint qualification and various stationary conditions for UNMPVC. Moreover, we deduce sufficient optimality conditions for UNMPVC. In
Section 4 and
Section 5, we formulate two dual models, namely WRD and MWRD, related to the problem of UNMPVC. We deduce various duality relationships between the UNMPVC and its corresponding dual models. In
Section 6, we discuss the applicability of the results derived in this article in truss topology optimization. In
Section 7, we conclude the article by providing a summary of the key findings and various possible future research avenues.
3. Optimality Criteria
In this section, we consider a nonsmooth MOP with vanishing constraints under data uncertainty. We introduce GS-ACQ at a feasible point of UNMPVC. Moreover, we introduce RW-stationary, RM-stationary and RS-stationary points for UNMPVC. By employing GS-ACQ, we establish that the RS-stationary is a necessary optimality criterion for UNMPVC. Subsequently, we establish sufficient optimality criteria for UNMPVC.
In the remaining portion of this article, we examine the following UNMPVC:
where
,
,
,
,
,
,
,
, and
,
are extended real-valued functions and admit bounded USRC;
,
and
are uncertain parameters; and
,
,
are nonempty convex subsets of
,
and
, respectively.
Associated with UNMPVC, the robust multiobjective programming problem (RNMPVC) is defined as
The feasible set
of RNMPVC is
Therefore, the problem RNMPVC can be transformed into the following nonsmooth multiobjective programming problems with vanishing constraints (NMPVC*):
The feasible set
of NMPVC* is:
In the sequel, the following definitions are used.
Definition 6 ([
55])
. A feasible element is a robust Pareto (robust weak Pareto, respectively) solution of UNMPVC if there is no other feasible point , such that . Definition 7 ([
55])
. A feasible element is a robust local Pareto (robust local weak Pareto, respectively) solution of UNMPVC if for any neighbourhood of there is no other feasible point , such that To facilitate the development of our main results, we define the subsequent index sets for a given
.
We define the subsequent notations as follows:
Generalized standard Abadie constraint qualification (GS-ACQ) for UNMPVC is introduced in the following definition, which will be useful in establishing first-order necessary local weak Pareto efficiency conditions for UNMPVC.
Definition 8. For , if at least one of the dual sets used to define is non-zero andthen the generalized standard Abadie constraint qualification (GS-ACQ) is satisfied at . In the subsequent definitions, we introduce various stationary conditions for UNMPVC employing convexificators.
Definition 9. Let . is a generalized robust weakly stationary (RW-stationary) point if there exist and such that Definition 10. Let . is a generalized robust Mordukhovich stationary (RM-stationary) point if there exist and such that they satisfy conditions (1)–(3) along with the subsequent condition: Definition 11. Let . is a generalized robust strong stationary (RS-stationary) point if there exist and such that they satisfy conditions (1)–(3) along with the subsequent condition: From the above definitions, we conclude that
In the following theorem, by employing GS-ACQ, we establish that the RS-stationary conditions are necessary for a local weak Pareto efficiency of UNMPVC.
Theorem 3. Let be a robust local weak Pareto solution of UNMPVC. Assume that , , are locally Lipschitz functions and admit bounded USRC. If GS-ACQ holds at and the coneis closed, then there exist , , and , such that is a RS-stationary point of UNMPVC. Proof. Since
is a robust local weak Pareto solution of UNMPVC, then
is a robust local weak Pareto solution of NMPVC*. To derive the above result, it is enough to demonstrate that for every
Let us consider an alternative scenario where there exists an index
such that the following condition holds:
Since
admits bounded USRC,
and
are compact convex set and closed convex set, respectively; therefore,
is a closed convex set in
. According to the convex separation theorem, there exists
, such that the following inequality holds:
Given that every cone includes the zero vector, we obtain
Hence
, such that
Also, we deduce that
Consequently,
From (
5)–(
11), we obtain
According to GS-ACQ, we obtain
Therefore, there exist
and
, such that
Let
denote the Lipschitz constant for
in the vicinity of
. Then for sufficiently large
n we have
Hence, for a sufficiently large
n, we have
From (
12) and (
13), we derive a contradiction with the local weak Pareto efficiency at
Consequently, (
4) holds. As a result, there exist non-negative multipliers
, such that
Taking
from (
14), we obtain
Hence, is an RS-stationary point of NMPVC*. From Theorem 2, there exist , , and , such that is a RS-stationary point of UNMPVC. □
Remark 1. - 1
It is worthwhile to note that Theorem 3 extends the scope of Theorem 3.1 established by Hu et al. [40] for nonsmooth MPVC to a broader class of programming problems involving data uncertainty. If , and are singleton sets, then Theorem 3 reduces to Theorem 3.1 established in [40]. - 2
In the domain of robust optimization, Theorem 3 extends the robust first-order optimality conditions established by Chen et al. [55] for nonsmooth MOP with uncertain data to encompass a more general class of programming problems, UNMPVC. In particular, if and , Theorem 3 reduces to Theorem 3.3 established by Chen et al. [55].
We consider the following non-trivial example in the Euclidean space to highlight the significance of the necessary optimality conditions derived in Theorem 3.
Example 1. Let us examine the following problem given bywhere , , , and It is evident thatand is a robust local weak Pareto solution in (P1). Furthermore, in view of Definition 3, the upper semi-regular convexificators at of each function constituting (P1) are given by Hence, GS-ACQ is satisfied at and is a closed set. Moreover, there exist and , such that is a RS-stationary point of (P1).
Next, we derive the sufficient optimality conditions, under the assumptions of generalized convexity, for the robust local weak Pareto solution and robust local Pareto solution of UNMPVC.
Theorem 4. Let us assume that be an RS-stationary point of UNMPVC. Let us consider the following index sets: Assume that , , , , and , are -quasiconvex at . Then,
- 1
is a robust weak Pareto solution of UNMPVC, if are -pseudoconvex at and ;
- 2
is a robust Pareto solution of UNMPVC, if are strictly -pseudoconvex at and .
Remark 2. - 1
Theorem 4 extends Theorem 3.4 derived in [55] from nonsmooth uncertain programming problems to a broader category of mathematical programming problems, namely UNMPVC. For and Theorem 4 simplifies to Theorem 3.4 derived in [55]. - 2
Theorem 4 extends Theorem 3.3 derived in [40] from nonsmooth MPVC to a wider category of optimization problems, UNMPVC. If and are singleton sets, then Theorem 4 is similar to the sufficient optimality criteria derived in [40].
To illustrate the practical relevance of the results established in Theorem 4, we furnish the subsequent example:
Example 2. Let us consider the following nonsmooth multiobjective programming problem incorporating vanishing constraints under data uncertainty given bywhere , , , , and It is evident thatand is a robust local weak Pareto solution of (P2). Furthermore, according to Definition 3, the upper semi-regular convexificators at of each function constituting (P2) are given byWe know that is a RS-stationary point and . Moreover, at , are -pseudoconvex and Ψ, , and are -quasiconvex. Therefore, the requirements of Theorem 4 are fulfilled at . In the next example, we investigate a UNMPVC with the objective function having three components. Employing MATLAB R2024a, we generate the Pareto front of the considered problem.
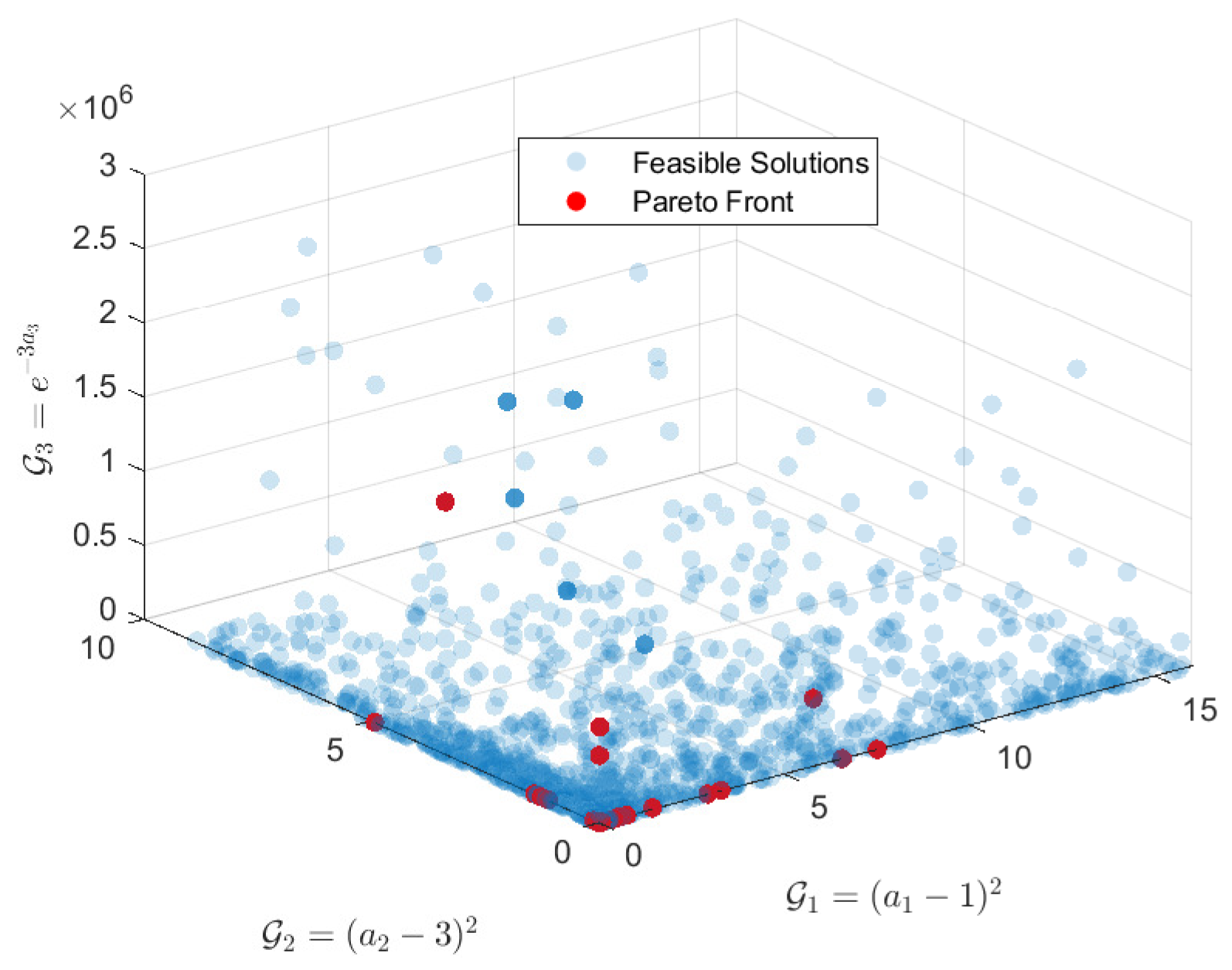
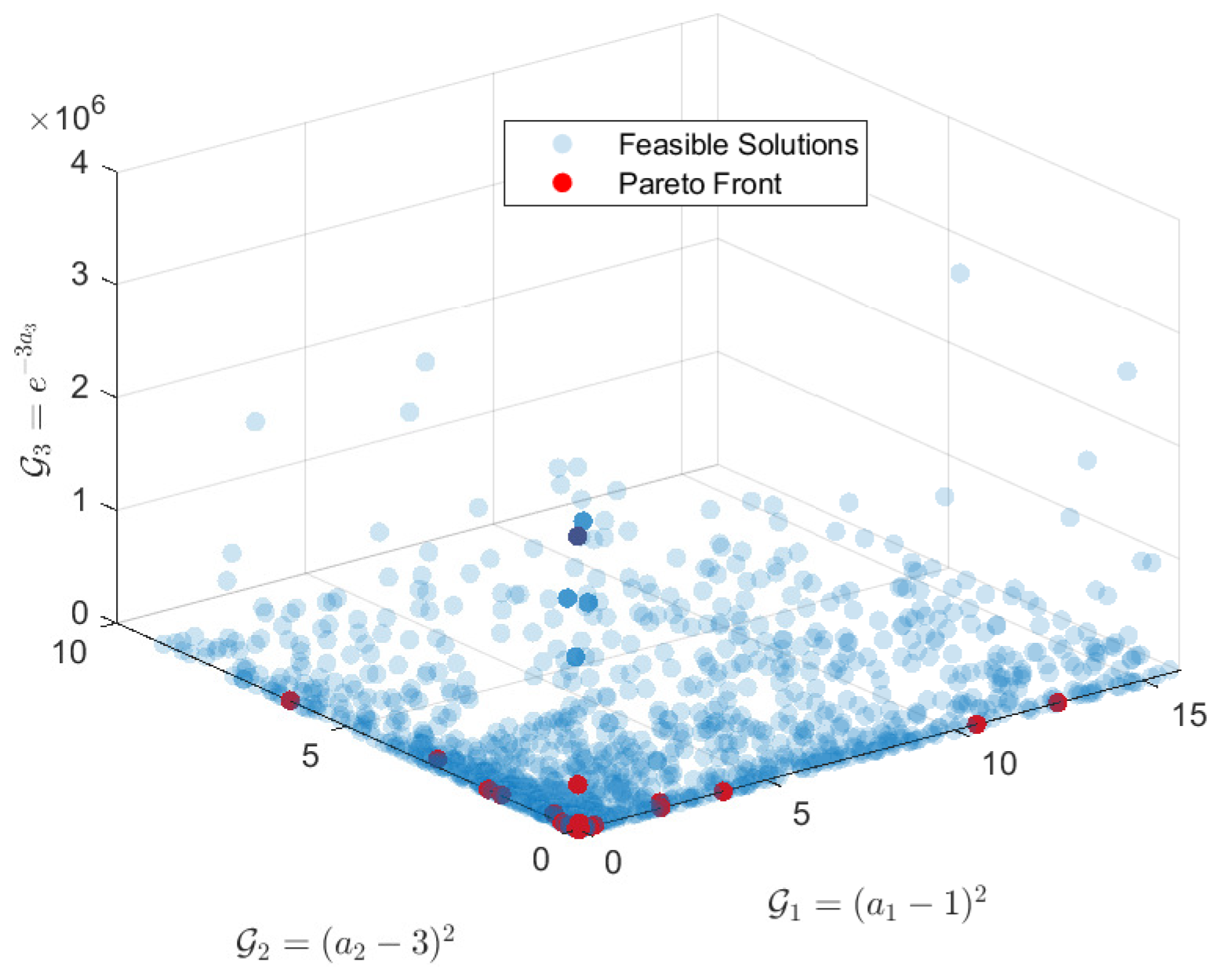
Example 3. Let us consider the following nonsmooth MPVC under data uncertainty given bywhere , , , , and Then, the robust counterpart of (P3) is given by Now, employing MATLAB R2024a, we generate the Pareto front of the problem (P3) and the robust counterpart (RC), as shown in the following figures:
Employing MATLAB R2024a, we generate 5000 random values of for each and verify whether it is feasible or not. Then, from the set of feasible solutions, we find the Pareto front of the considered problem (P3) and the RC. In Figure 1 and Figure 2, the feasible solutions are represented by a blue colour, and the Pareto front solutions are represented by a red colour. Since the robust counterpart is formed by maximizing the constraints over the uncertain parameters, some of the feasible points of the problem (P3) may no longer be feasible in the robust counterpart.
4. Wolfe-Type Robust Dual Model
This section deals with formulating a Wolfe-type robust dual model (WRD) relating to the problem, UNMPVC. We further extend our analysis by establishing weak, strong, and strict converse duality results. These theorems illuminate the profound interrelationships between UNMPVC and its corresponding dual model, WRD.
We formulate WRD corresponding to the problem UNMPVC as follows:
where
and
is feasible set of WRD given by
The subsequent theorem delves into the weak duality relation between UNMPVC and WRD.
Theorem 5. Let and . Suppose that , , and are -convex functions at and admit bounded USRC. Moreover, we suppose that . Then, we have Proof. On the other hand, suppose that
Multiplying (
24) by
, and since
, we obtain
Let
. In light of the fact that
are
-convex at
, and we obtain the subsequent inequalities:
In a similar manner, by employing the
-convexity assumptions of
,
, and
at
, we obtain the subsequent inequalities:
If
, then multiplying (
26)–(
32) by
,
,
,
,
,
, respectively, and then by summing these inequalities, we obtain the following:
Given the feasibility conditions of
, there exist
,
,
,
,
,
, and
, such that
Since
, we have
Therefore,
Hence, from (
25), a contradiction is reached, which concludes the proof of the weak duality theorem. □
In the subsequent theorem, a strong duality result is established, which relates UNMPVC with the associated WRD dual model.
Theorem 6. Let be a robust local weak Pareto solution of UNMPVC. Suppose that , and are -convex functions at and admit bounded USRC. Assume also that at , GS-ACQ holds. Then, there exists , such that becomes a robust local weak Pareto solution of the WRD. Moreover, the corresponding objective function values are equal.
Proof. Given that GS-ACQ holds as a robust local weak Pareto solution
of UNMPVC, then, in light of Theorem 3, there exists
such that
satisfies RS-stationary conditions of UNMPVC. Thus, there exist
,
,
,
,
and
, such that
Therefore,
. Theorem 5 then implies that for any
, we have
Given the feasibility conditions of UNMPVC and WRD, we have
Therefore, we have
From Equations (
33) and (
34), we have
Therefore, is a robust local weak Pareto solution of WRD. Moreover, the corresponding objective function values are equal. □
Now, we establish the strict converse duality theorem relating WRD and UNMPVC.
Theorem 7. Let be the global weak Pareto solution of WRD and be a robust local weak Pareto solution of UNMPVC. Moreover, we suppose that the hypotheses of strong duality theorem hold at , such that are strictly -convex at and . Then .
Proof. Suppose that
. Theorem 6 then stipulates that
Multiplying (
35) by
, and since
, we get
In view of the fact that
are strictly
-convex at
, we infer that
In a similar manner, by employing the
-convexity assumptions of
at
, we obtain the subsequent inequalities:
If
, then multiplying (
37)–(
43) by
,
,
,
,
,
,
, respectively, and then by summing these inequalities, we obtain the following:
Given the feasibility conditions of
, there exist
,
,
,
,
,
and
, such that
Since
, we have
Therefore,
This contradicts (
36). Thus,
. This concludes the proof. □
Remark 3. - 1
It is worthwhile to note that the weak, strong, and strict converse duality theorems presented in this article for the Wolfe-type robust dual model generalize Theorem 3, Theorem 4, and Theorem 7, respectively, derived by Mishra et al. [45] for MPVC to a more general programming problem, UNMPVC. - 2
If all the functions are continuously differentiable and if , and are singleton sets, then the Theorem 5, Theorem 6, and Theorem 7 reduce to Theorem 3, Theorem 4 and Theorem 7, respectively, derived by Mishra et al. [45].
5. Mond–Weir-Type Robust Dual Model
This section deals with formulating a Mond–Weir-type robust dual model (MWRD) associated with UNMPVC. We then deduce various duality results, including weak, strong, and strict converse duality, revealing the intricate connections between UNMPVC and MWRD.
We present the MWRD corresponding to the problem, UNMPVC, as follows:
where
represents the set of feasible elements of MWRD, which is defined as follows:
The subsequent theorem establishes a weak duality result connecting UNMPVC and MWRD.
Theorem 8 (Weak Duality).
Let and . We assume that are -convex at and admit bounded USRC. Assume also that . Then, Proof. On the other hand, suppose that
Multiplying (
45) by
, we obtain
Since
are
-convex at
, we have
Similarly, according to the
-convexity of
,
, and
at
, we have
If
, then multiplying (
47)–(
53) by
,
,
,
,
,
, respectively, and then by summing these inequalities, we obtain the following:
Given the feasibility conditions of
, there exist
,
,
,
,
,
, and
, such that
Since
, we have
Since
we have
Hence,
Hence, from (
46), we arrive at a contradiction. This concludes the proof of the weak duality theorem. □
In the subsequent theorem, a strong duality result is established, which relates UNMPVC to the associated MWRD dual model.
Theorem 9. Let be a local robust Pareto solution UNMPVC. Moreover, we assume that , and admit bounded USRC at , such that each function is a -convex function at . Furthermore, we suppose that at , GS-ACQ holds. Then, there exists , such that is a robust local weak Pareto solution of MWRD. Moreover, the corresponding objective function values are equal.
Proof. Given that GS-ACQ holds as a robust local weak Pareto solution
of UNMPVC, then, in light of Theorem 3, there exists
, such that
is a RS-stationary point of UNMPVC. Thus, there exist
,
,
,
and
, such that
Therefore,
. Theorem 8 then implies that for any
, we have
Therefore, is a robust local weak Pareto solution of MWRD. Moreover, the corresponding objective function values are equal. □
Now, we establish the strict converse duality theorem relating WRD and UNMPVC.
Theorem 10. Let be the global weak Pareto solution of WRD and be a robust local weak Pareto solution of UNMPVC. Moreover, we suppose that the hypotheses of the strong duality theorem hold at , such that are strictly -convex at , then .
Proof. Suppose that
. Theorem 9 then stipulates that
such that
and
Multiplying (
54) by
, we obtain
In view of the fact that
are strictly
-convex at
, we infer that
Similarly, according to the
-convexity of
at
, we have
If
, then multiplying (
56)–(
62) by
,
,
,
,
,
,
, respectively, and then by summing these inequalities, we obtain the following:
Given the feasibility conditions of
, there exist
,
,
,
,
,
, and
, such that
Since
and
, we have
which contradicts (
55). Therefore,
. □
Remark 4. Theorem 8, Theorem 9, and Theorem 10 presented in this article for the Mond–Weir-type robust dual model generalize Theorem 8, Theorem 9 and Theorem 12, respectively, deduced by Mishra et al. [45] for MPVC to a broader class of programming problems involving data uncertainty. To illustrate the duality results deduced in the manuscript for WRD- and MWRD-type dual problems related to UNMPVC, we present the following non-trivial example in the Euclidean space setting.
Example 4. Let us examine the subsequent robust multiobjective programming problem with vanishing constraints under data uncertainty given bywhere , , , and The set of feasible elements of (P4) is given by It can be verified that given any feasible solution to the primal problem, inequality (23) is satisfied. Hence, Theorem 5 is satisfied for the considered problem (P4). Furthermore, GS-ACQ is satisfied at and there exists , such that is a feasible solution of the dual problem. Hence, Theorem 6 holds for the considered problem (P4). Moreover, objective functions are strictly -convex at , and according to Theorem 4, is a robust local weak Pareto solution of the primal problem (P4). It can be verified from the weak duality theorem that is the global robust weak Pareto solution of the Wolfe-type dual problem (P4). Hence, Theorem 7 is verified for the problem (P4). Now, corresponding to (P4), we formulate the MWRD as follows: Similar to the Wolfe-type robust dual model, it can be verified that given any feasible solution to the considered problem (P4), inequality (44) is satisfied. Hence, Theorem 8 holds for the considered problem (P4). Moreover, at , GS-ACQ is satisfied and there exists , such that is a feasible solution of the dual problem. Hence, Theorem 9 holds for the considered problem (P4). Moreover, objective functions are strictly -convex at , and from Theorem 4, is a robust local weak Pareto solution of the primal problem (P4). It can be verified from Theorem 8 that is the global robust weak Pareto solution of the Mond–Weir-type dual problem of (P4). Hence, Theorem 10 is verified for the problem (P4). 6. Application and Significance
In this section, we explore the application of UNMPVC in truss topology optimization with uncertainty due to variations in temperature. We examine a truss of size
consisting of six nodes and ten potential bars, with the two leftmost nodes fixed. The cross-sectional area of each of the 10 bars (
) is denoted by
. Moreover, the length of each bar is denoted by
. Let
, and
are three auxiliary vector variables as defined in [
59]. The global stiffness matrix of the truss,
, is given by
with some vectors
and the Young’s modulus
E.
It is worth noting that depends on the Young’s modulus, which is influenced by factors such as temperature, pressure, and material composition. Suppose that there is uncertainty due to variation in temperature, i.e., , where and represent the minimum and maximum temperature of the environment, respectively. Therefore, we suppose that , represents the uncertain global stiffness matrix of the truss.
Building on the above discussions, we now consider the following uncertain truss optimization problem:
where the inequality
bounds the work caused by force
,
is a constant, and
is an uncertain parameter. Moreover,
and
represent the maximum and minimum cross-sectional area, respectively. Furthermore, for each
, the function
denotes the stress on each bar.
Then, the robust counterpart of the considered problem (P5) is given by
The problem (P5) can be effectively solved by employing the results established in this article.
Remark 5. If Ω
is a singleton set, then the problem (P5) reduces to the well-known deterministic truss optimization problem considered by Hoheisel et al. [59]. To illustrate the importance of the results deduced in the present article, we consider the subsequent example:
Example 5. We consider the following problem with vanishing constraints under data uncertainty:where , , , and It is evident thatand is a robust local weak Pareto solution in (P6). Furthermore, in view of Definition 3, the upper semi-regular convexificators at of each function constituting (P6) are given by It can be verified that, at , GS-ACQ holds, and is a closed set. Moreover, is a RS-stationary point of (P6). In addition to this, at , are -pseudoconvex; Ψ, , and are -quasiconvex. Hence, the hypothesis of Theorem 4 is fulfilled at .
We formulate WRD corresponding to the primal problem (P6) as follows:where . The set of feasible solutions is defined as Since, at , GS-ACQ holds, and there exists , such that is a feasible solution of the dual problem. Hence, Theorem 6 holds for the considered problem . Moreover, objective functions are strictly -convex at and from Theorem 4, is a robust local weak Pareto solution of the primal problem . It can be verified from the Theorem 5 that is the global robust weak Pareto solution of the Wolfe-type dual problem of . Hence, Theorem 7 is verified for the problem .
Now, corresponding to the problem , the MWRD problem can be stated as Similar to the WRD, it can be verified that given any feasible solution to the primal problem, inequality (44) is satisfied. Hence, Theorem 8 holds for the considered problem . Moreover, at , GS-ACQ holds and there exists , such that is a feasible solution of the dual problem. Hence, Theorem 9 holds for the considered problem . Moreover, the objective functions are strictly -convex at , and from Theorem 4, is a robust local weak Pareto solution of the primal problem . It can be verified from Theorem 8 that is the global robust weak Pareto solution of the MWRD problem of . Hence, Theorem 10 is verified for the problem . 

 ,
, {kind=link}
{kind=link}