

Systematic Analysis and Design of Control Systems Based on Lyapunov’s Direct Method


{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methods
2.1. Polynomialization
| Algorithm 1 Rational recast [29,30] |
|
2.2. Quantifier Elimination
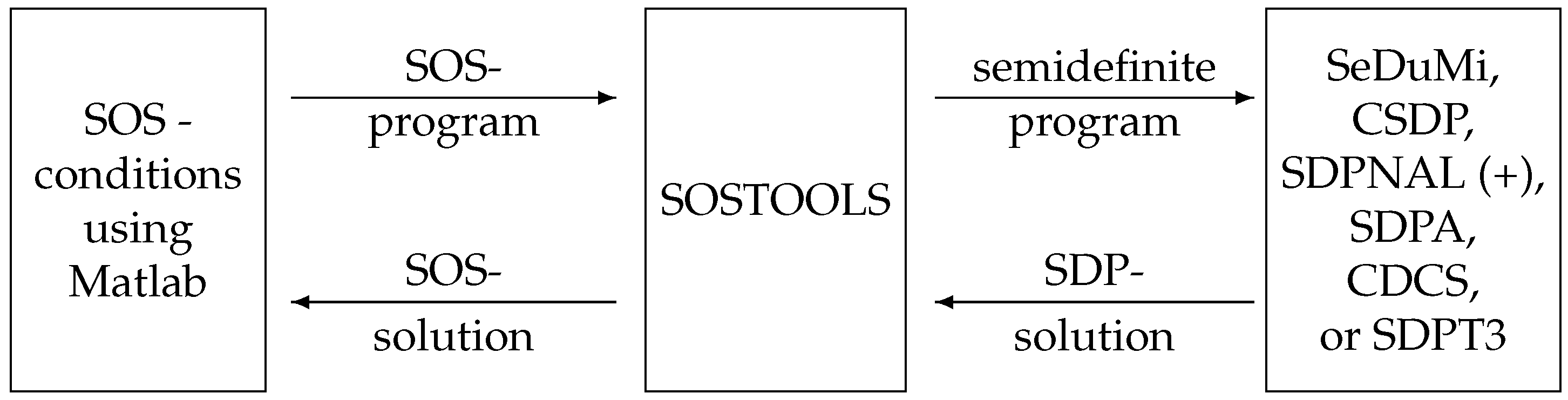
2.3. Sum-of-Squares Decomposition
3. Stability Analysis
3.1. Lyapunov’s Direct Method
3.2. Input-to-State Stability
3.3. Input-to-State Stability of the Recasted System
4. Controller Design
4.1. Control Lyapunov Function
4.2. ISS Control Lyapunov Function
5. Examples
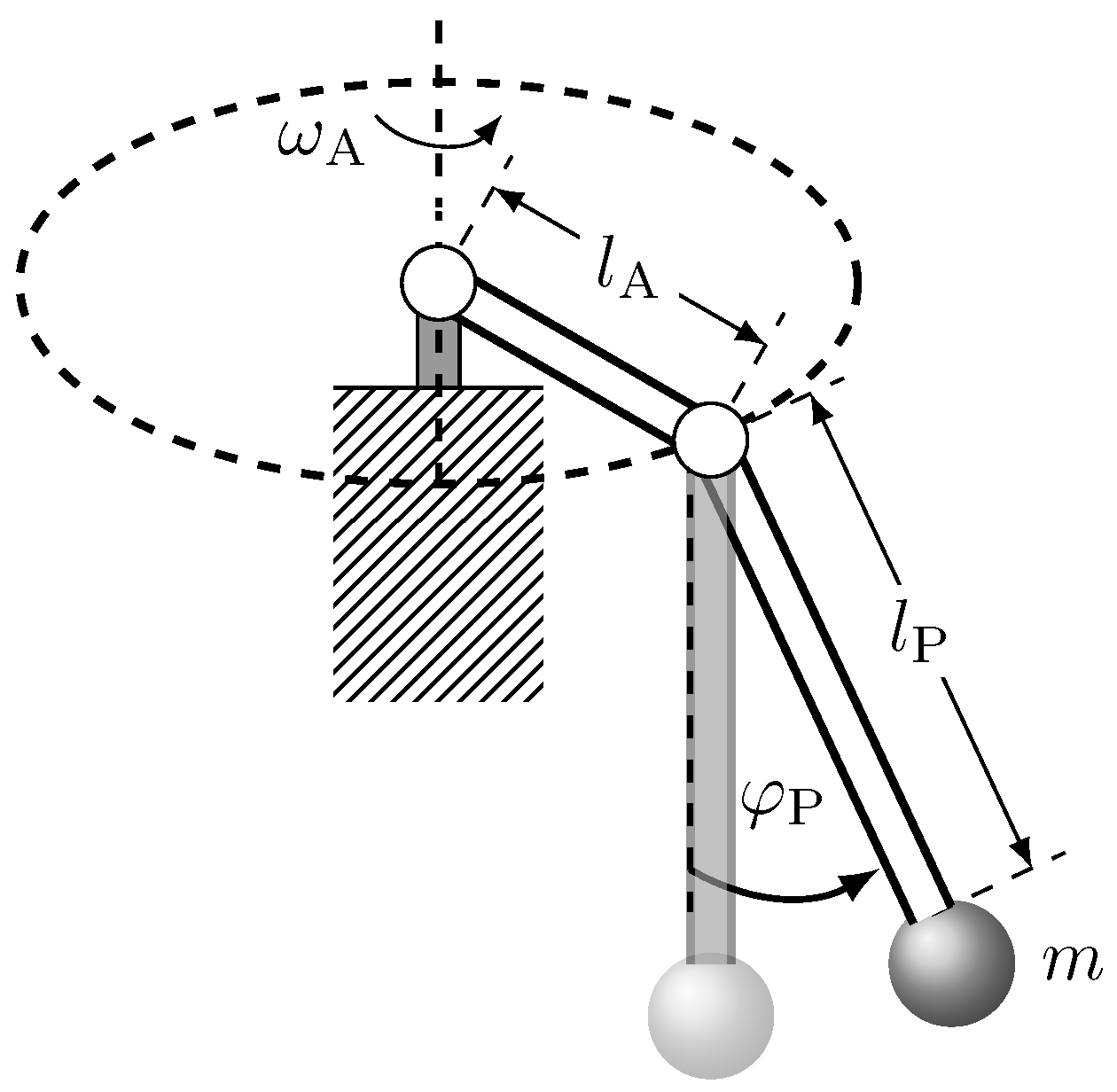
5.1. Furuta Pendulum
5.2. Van de Vusse-Reaction
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kalman, R.E.; Bertram, J.E. Control system analysis and design via the “Second Method” of Lyapunov: I Continuous-time systems. J. Basic Engeineering 1960, 82, 371–393. [Google Scholar] [CrossRef]
- Hahn, W. Stability of Motion; Springer: Berlin/Heidelberg, Germany, 1967. [Google Scholar]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prentice-Hall: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Adamy, J. Nichtlineare Systeme und Regelungen, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Sontag, E.; Teel, A. Changing supply functions in input/state stable systems. IEEE Trans. Autom. Control 1995, 40, 1476–1478. [Google Scholar] [CrossRef]
- Sontag, E.D.; Wang, Y. On Characterization of the Input-to-State Stability Property. Syst. Control Lett. 1995, 24, 351–359. [Google Scholar] [CrossRef]
- Sontag, E.D.; Wang, Y. New characterizations of input-to-state stability. IEEE Trans. Autom. Control 1996, 41, 1283–1294. [Google Scholar] [CrossRef]
- Sontag, E.D. A ‘universal’ construction of Artstein’s theorem on nonlinear stabilization. Syst. Control Lett. 1989, 13, 117–123. [Google Scholar] [CrossRef]
- Artstein, Z. Stabilization with relaxed controls. Nonlinear Anal. 1983, 7, 1163–1173. [Google Scholar] [CrossRef]
- Sepulchre, R.; Janković, M.; Kokotović, P. Constructive Nonlinear Control; Springer: London, UK, 1997. [Google Scholar]
- Bellman, R. Vector Lyapunov functions. J. Soc. Ind. Appl. Math. Ser. A Control 1962, 1, 32–34. [Google Scholar] [CrossRef]
- Nersesov, S.G.; Haddad, W.M. On the stability and control of nonlinear dynamical systems via vector Lyapunov functions. IEEE Trans. Autom. Control 2006, 51, 203–215. [Google Scholar] [CrossRef]
- Lakshmikantham, V.; Matrosov, V.M.; Sivasundaram, S. Vector Lyapunov Functions and Stability Analysis of Nonlinear Systems; Springer: Dortrecht, The Netherlands, 1991; Volume 63 of Mathematics and Its Applications. [Google Scholar]
- Rudolph, J. Rekursiver Entwurf stabiler Regelkreise durch sukzessive Berücksichtigung von Integratoren und quasi-statische Rückführungen. Automatisierungstechnik 2005, 53, 389–399. [Google Scholar] [CrossRef]
- Yegorov, I.; Dower, P.M.; Grüne, L. Synthesis of control Lyapunov functions and stabilizing feedback strategies using exit-time optimal control Part II: Numerical approach. Optim. Control Appl. Methods 2021, 42, 1410–1440. [Google Scholar] [CrossRef]
- Grüne, L.; Sperl, M. Examples for separable control Lyapunov functions and their neural network approximation. IFAC-PapersOnLine 2023, 56, 19–24. [Google Scholar] [CrossRef]
- Taylor, A.J.; Dorobantu, V.D.; Le, H.M.; Yue, Y.; Ames, A.D. Episodic learning with control Lyapunov functions for uncertain robotic systems. In Proceedings of the International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 6878–6884. [Google Scholar]
- Voßwinkel, R.; Röbenack, K. Determining input-to-state and incremental input-to-state stability of nonpolynomial systems. Int. J. Robust Nonlinear Control. 2020, 30, 4676–4689. [Google Scholar] [CrossRef]
- Voßwinkel, R.; Mihailescu-Stoica, D.; Schrödel, F.; Röbenack, K. Determining Passivity via Quantifier Elimination. In Proceedings of the 27th Mediterranean Conference on Control and Automation (MED), Akko, Israel, 1–4 July 2019; pp. 13–18. [Google Scholar] [CrossRef]
- Röbenack, K.; Voßwinkel, R.; Franke, M. On the Eigenvalue Placement by Static Output Feedback Via Quantifier Elimination. In Proceedings of the Mediterranean Conference on Control and Automation (MED’18), Zadar, Croatia, 19–22 June 2018; pp. 133–138. [Google Scholar] [CrossRef]
- Röbenack, K.; Voßwinkel, R. Static Output Feedback Control by Interval Eigenvalue Placement using Quantifier Elimination. SWIM 2018, 2018, 11. [Google Scholar]
- Röbenack, K.; Voßwinkel, R.; Franke, M.; Franke, M. Stabilization by Static Output Feedback: A Quantifier Elimination Approach. In Proceedings of the International Conference on System Theory, Control and Computing (ICSTCC 2018), Sinaia, Romania, 10–12 October 2018; pp. 715–721. [Google Scholar] [CrossRef]
- Chesi, G. Domain of Attraction-Analysis and Control via SOS Programming; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Röbenack, K.; Voßwinkel, R.; Richter, H. Calculating Positive Invariant Sets: A Quantifier Elimination Approach. J. Comput. Nonlinear Dyn. 2019, 14, 074502. [Google Scholar] [CrossRef]
- Röbenack, K.; Voßwinkel, R.; Richter, H. Automatic Generation of Bounds for Polynomial Systems with Application to the Lorenz System. Chaos Solitons Fractals 2018, 113C, 25–30. [Google Scholar] [CrossRef]
- She, Z.; Xia, B.; Xiao, R.; Zheng, Z. A semi-algebraic approach for asymptotic stability analysis. Nonlinear Anal. Hybrid Syst. 2009, 3, 588–596. [Google Scholar] [CrossRef]
- Tibken, B. Estimation of the domain of attraction for polynomial systems via LMIs. In Proceedings of the Proc. of the 39th IEEE Conference on Decision and Control (CDC), Sydney, NSW, Australia, 12–15 December 2000; Volume 4, pp. 3860–3864. [Google Scholar] [CrossRef]
- Savageau, M.A.; Voit, E.O. Recasting nonlinear differential equations as S-systems: A canonical nonlinear form. Math. Biosci. 1987, 87, 83–115. [Google Scholar] [CrossRef]
- Papachristodoulou, A.; Prajna, S. Analysis of Non-polynomial Systems Using the Sum of Squares Decomposition. In Positive Polynomials in Control; Springer: Berlin/Heidelberg, Germany, 2005; pp. 23–43. [Google Scholar]
- Tarski, A. A decision method for elementary algebra and geometry. In Quantifier Elimination and Cylindrical Algebraic Decomposition; Caviness, B.F., Johnson, J.R., Eds.; Springer: Vienna, Austria, 1998; pp. 24–84. [Google Scholar]
- Seidenberg, A. A New Decision Method for Elementary Algebra. Ann. Math. 1954, 60, 365–374. [Google Scholar] [CrossRef]
- Caviness, B.F.; Johnson, J.R. (Eds.) Quantifier Elimination and Cylindical Algebraic Decomposition; Springer: Vienna, Austria, 1998. [Google Scholar]
- Collins, G.E. Quantifier elimination for real closed fields by cylindrical algebraic decomposition—Preliminary report. ACM SIGSAM Bull. 1974, 8, 80–90. [Google Scholar] [CrossRef]
- Weispfenning, V. Quantifier Elimination for Real Algebra—The Cubic Case. In Proceedings of the Proc. of the Int. Symp. on Symbolic and Algebraic Computation (ISSAC), Oxford, UK, 20–22 July 1994; pp. 258–263. [Google Scholar] [CrossRef]
- Gonzalez-Vega, L.; Lombardi, H.; Recio, T.; Roy, M.F. Sturm-Habicht Sequence. In Proceedings of the Proc. of the ACM-SIGSAM 1989 International Symposium on Symbolic and Algebraic Computation, Portland, OR, USA, 17–19 July 1989; pp. 136–146. [Google Scholar] [CrossRef]
- Iwane, H.; Yanami, H.; Anai, H.; Yokoyama, K. An effective implementation of symbolic-numeric cylindrical algebraic decomposition for quantifier elimination. Theor. Comput. Sci. 2013, 479, 43–69. [Google Scholar] [CrossRef]
- Dolzmann, A.; Sturm, T. Redlog: Computer algebra meets computer logic. ACM SIGSAM Bull. 1997, 31, 2–9. [Google Scholar] [CrossRef]
- Chen, C.; Maza, M.M. Quantifier elimination by cylindrical algebraic decomposition based on regular chains. J. Symb. Comput. 2016, 75, 74–93. [Google Scholar] [CrossRef]
- Anai, H.; Yanami, H. SyNRAC: A Maple-Package for Solving Real Algebraic Constraints. In Computational Science — ICCS 2003: International Conference, Melbourne, Australia and St. Petersburg, Russia, 2–4 June 2003; Part I; Lecture Notes in Computer Science; Sloot, P.M.A., Abramson, D., Bogdanov, A.V., Dongarra, J.J., Zomaya, A.Y., Gorbachev, Y.E., Eds.; Springer: Berlin/Heidelberg, Germany, 2003; Volume 2657, pp. 828–837. [Google Scholar]
- Röbenack, K.; Voßwinkel, R. Solution of control engineering problems by means of quantifier elimination (in German). Automatisierungstechnik 2019, 67, 714–726. [Google Scholar] [CrossRef]
- Motzkin, T.S. The arithmetic-geometric inequality. In Proceedings of the Inequalities (Proc. Sympos. Wright-Patterson Air Force Base); Academic Press: New York, NY, USA, 1967; pp. 205–224. [Google Scholar]
- Reznick, B. Some concrete aspects of Hilbert’s 17th problem. Contemp. Math. 2000, 253, 251–272. [Google Scholar]
- Chesi, G. On the Gap Between Positive Polynomials and SOS of Polynomials. IEEE Trans. Autom. Control 2007, 52, 1066–1072. [Google Scholar] [CrossRef]
- Parrilo, P.A. Structured Semidefinite Programs and Semialgebraic Geometry Methods in Robustness and Optimization. Ph.D. Thesis, California Institute of Technology, Pasadena, CA, USA, 2000. [Google Scholar]
- Sturm, J.F. Using SeDuMi 1.02, A Matlab toolbox for optimization over symmetric cones. Optim. Methods Softw. 1999, 11, 625–653. [Google Scholar] [CrossRef]
- Borchers, B. CSDP, A C library for semidefinite programming. Optim. Methods Softw. 1999, 11, 613–623. [Google Scholar] [CrossRef]
- Zhao, X.; Sun, D.; Toh, K. A Newton-CG Augmented Lagrangian Method for Semidefinite Programming. SIAM J. Optim. 2010, 20, 1737–1765. [Google Scholar] [CrossRef]
- Yang, L.; Sun, D.; Toh, K.C. SDPNAL +: A majorized semismooth Newton-CG augmented Lagrangian method for semidefinite programming with nonnegative constraints. Math. Program. Comput. 2015, 7, 331–366. [Google Scholar] [CrossRef]
- Yamashita, M.; Fujisawa, K.; Kojima, M. Implementation and evaluation of SDPA 6.0 (Semidefinite Programming Algorithm 6.0). Optim. Methods Softw. 2003, 18, 491–505. [Google Scholar] [CrossRef]
- Zheng, Y.; Fantuzzi, G.; Papachristodoulou, A.; Goulart, P.; Wynn, A. CDCS: Cone Decomposition Conic Solver, Version 1.1. Available online: https://github.com/oxfordcontrol/CDCS (accessed on 11 July 2018).
- Toh, K.C.; Todd, M.J.; Tütüncü, H.R. On the Implementation and Usage of SDPT3—A Matlab Software Package for Semidefinite-Quadratic-Linear Programming, Version 4.0. In Handbook on Semidefinite, Conic and Polynomial Optimization; Springer: New York, NY, USA, 2012; pp. 715–754. [Google Scholar]
- Prajna, S.; Papachristodoulou, A.; Parrilo, P.A. Introducing SOSTOOLS: A general purpose sum of squares programming solver. In Proceedings of the Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002; pp. 741–746. [Google Scholar]
- Voßwinkel, R. Systematische Analyse und Entwurf von Regelungseinrichtungen auf Basis von Lyapunov’s Direkter Methode; Springer Vieweg: Wiesbaden/Heidelberg, Germany, 2019. [Google Scholar]
- Arnold, V.I. Ordinary Differential Equations; Springer: Berlin/Heidelberg, Germany, 1992. [Google Scholar]
- Isidori, A. Nonlinear Control Systems II; Springer: London, UK, 1999. [Google Scholar]
- Ichihara, H. Sum of Squares Based Input-to-State Stability Analysis of Polynomial Nonlinear Systems. SICE J. Control. Meas. Syst. Integr. 2012, 5, 218–225. [Google Scholar] [CrossRef]
- Sontag, E.D. Mathematical Control Theory, 2nd ed.; Texts in Applied Mathematics; Springer: New York, NY, USA, 1998; Volume 6 of Text in Applied Mathematics. [Google Scholar]
- Freeman, R.A.; Primbs, J.A. Control Lyapunov functions: New ideas from an old source. In Proceedings of the IEEE Conference on Decision and Control (CDC), Kobe, Japan, 13 December 1996; pp. 3926–3931. [Google Scholar]
- Freeman, R.A.; Kokotovic, P.V. Inverse optimality in robust stabilization. SIAM J. Control Optim. 1996, 34, 1365–1391. [Google Scholar] [CrossRef]
- Sackmann, M. Modifizierte Optimale Regelung—Stabilitätsorientierter nichtlinearer Reglerentwurf. Automatisierungstechnik 2005, 53, 367–377. [Google Scholar] [CrossRef]
- Tan, W. Nonlinear Control Analysis and Synthesis using Sum-of-Squares Programming. Ph.D. Thesis, University of California, Berkeley, CA, USA, 2006. [Google Scholar]
- Tan, W.; Packard, A. Searching for Control Lyapunov Functions using Sums of Squares Programming. In Proceedings of the 42nd Annual Allerton Conference on Communications, Control and Computing, Monticello, IL, USA, 29 September–1 October 2004; pp. 210–219. [Google Scholar]
- Bochnak, J.; Coste, M.; Roy, M.F. Real Algebraic Geometry; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 1998. [Google Scholar]
- Jarvis-Wloszek, Z.; Feeley, R.; Tan, W.; Sun, K.; Packard, A. Some controls applications of sum of squares programming. In Proceedings of the 42nd IEEE International Conference on Decision and Control, Maui, HI, USA, 9–12 December 2003; pp. 4676–4681. [Google Scholar]
- Krstić, M.; Li, Z.H. Inverse optimal design of input-to-state stabilizing nonlinear controllers. IEEE Trans. Autom. Control 1998, 43, 336–350. [Google Scholar] [CrossRef]
- Liberzon, D.; Sontag, E.D.; Wang, Y. Universal construction of feedback laws achieving ISS and integral-ISS disturbance attenuation. Syst. Control Lett. 2002, 46, 111–127. [Google Scholar] [CrossRef]
- Lasalle, J.P. Some Extensions of Liapunov’s Second Method. IRE Trans. Circuit Theory 1960, 7, 520–527. [Google Scholar] [CrossRef]
- Gerbet, D.; Röbenack, K. Application of LaSalle’s Invariance Principle on Polynomial Differential Equations using Quantifier Elimination. IEEE Trans. Autom. Control 2021, 67, 3590–3597. [Google Scholar] [CrossRef]
- van de Vusse, J.G. Plug-flow type reactor versus tank reactor. Chem. Eng. Sci. 1964, 19, 994–997. [Google Scholar] [CrossRef]
- Doyle III, F.J.; Ogunnaike, B.A.; Pearson, R.K. Nonlinear Model-based Control Using Second-order Volterra Models. Automatica 1995, 31, 697–714. [Google Scholar] [CrossRef]
- Sontag, E.D.; Wang, Y. Output-to-state stability and detectability of nonlinear systems. Syst. Control Lett. 1997, 29, 279–290. [Google Scholar] [CrossRef]
- Krichman, M.; Sontag, E.D.; Wang, Y. Lyapunov characterisations of input-output-to-state stability. In Proceedings of the 38th IEEE Conf. on Decision and Control (CDC), Phoenix, AZ, USA, 7–10 December 1999; Volume 3, pp. 2070–2075. [Google Scholar] [CrossRef]
- Angeli, D.; Sontag, E.D.; Wang, Y. A characterization of integral input-to-state stability. IEEE Trans. Autom. Control 2000, 45, 1082–1097. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Voßwinkel, R.; Röbenack, K. Systematic Analysis and Design of Control Systems Based on Lyapunov’s Direct Method. Algorithms 2023, 16, 389. https://doi.org/10.3390/a16080389
Voßwinkel R, Röbenack K. Systematic Analysis and Design of Control Systems Based on Lyapunov’s Direct Method. Algorithms. 2023; 16(8):389. https://doi.org/10.3390/a16080389
Chicago/Turabian StyleVoßwinkel, Rick, and Klaus Röbenack. 2023. "Systematic Analysis and Design of Control Systems Based on Lyapunov’s Direct Method" Algorithms 16, no. 8: 389. https://doi.org/10.3390/a16080389
APA StyleVoßwinkel, R., & Röbenack, K. (2023). Systematic Analysis and Design of Control Systems Based on Lyapunov’s Direct Method. Algorithms, 16(8), 389. https://doi.org/10.3390/a16080389