
Quantifying Uncertainties in OC-SMART Ocean Color Retrievals: A Bayesian Inversion Algorithm


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. OC-SMART
2.1. Overview
2.2. Neural Network Training
2.3. Algorithm Validation
2.4. Application
3. Methodology for Quantifying Uncertainties
3.1. Bayesian Inversion
3.1.1. Convergence Check
3.1.2. Evaluation of the Jacobian
3.2. Measurement Error
3.3. A Priori Estimation

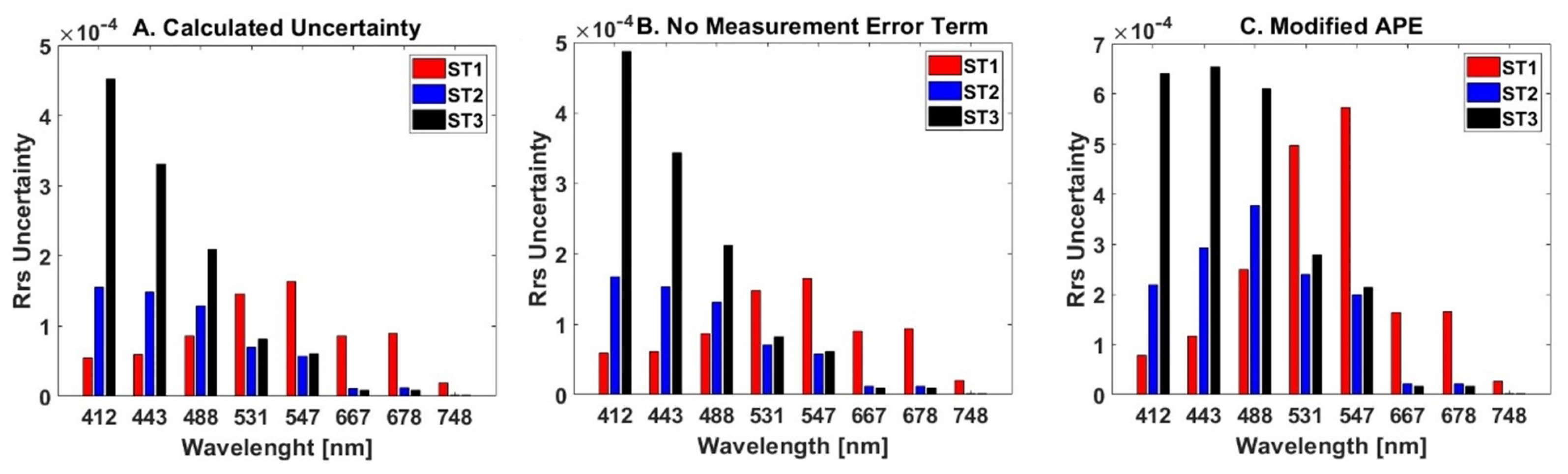
3.4. Special Cases
3.5. Experimental Setup
4. Case Studies and Discussion
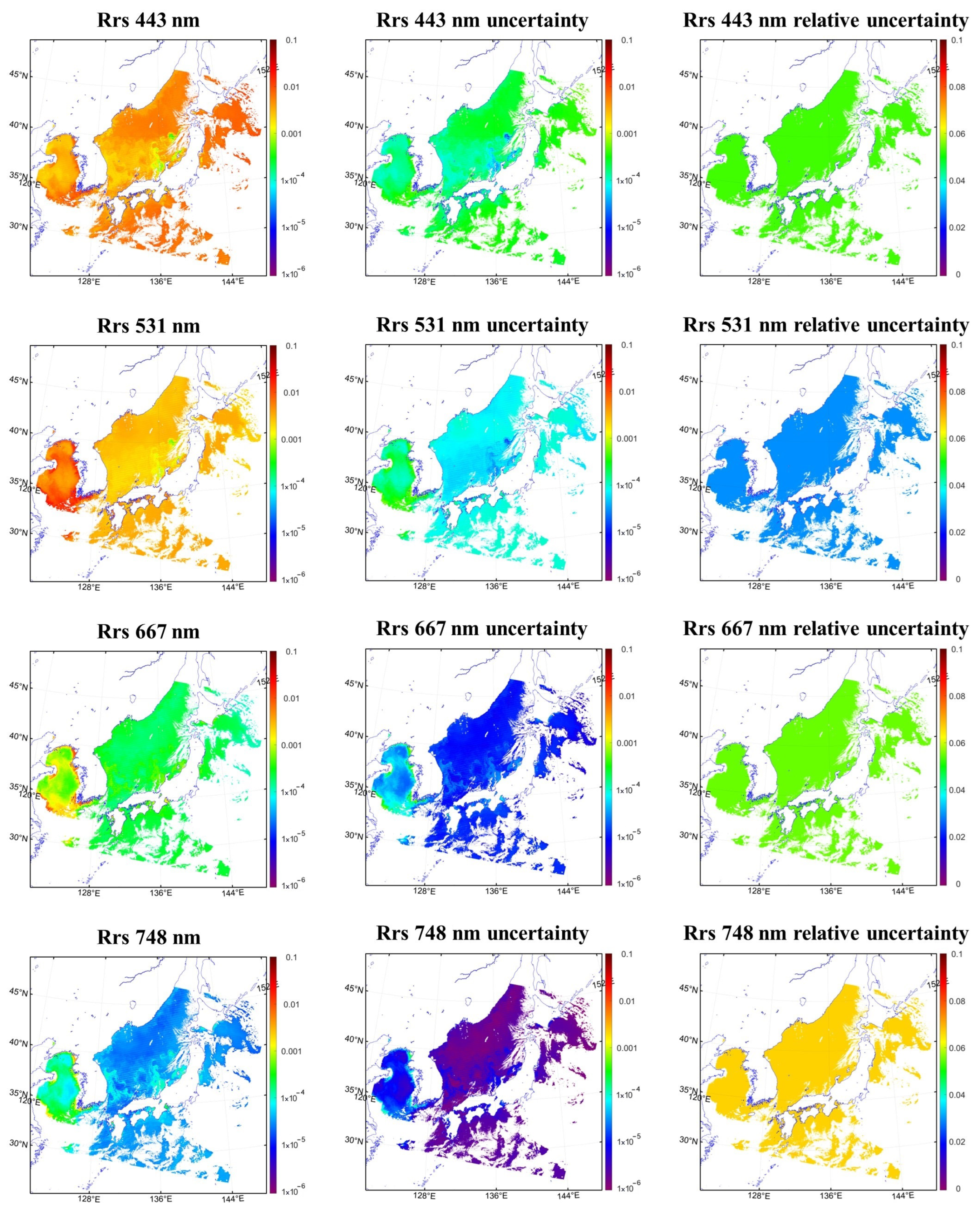
4.1. Application to MODIS
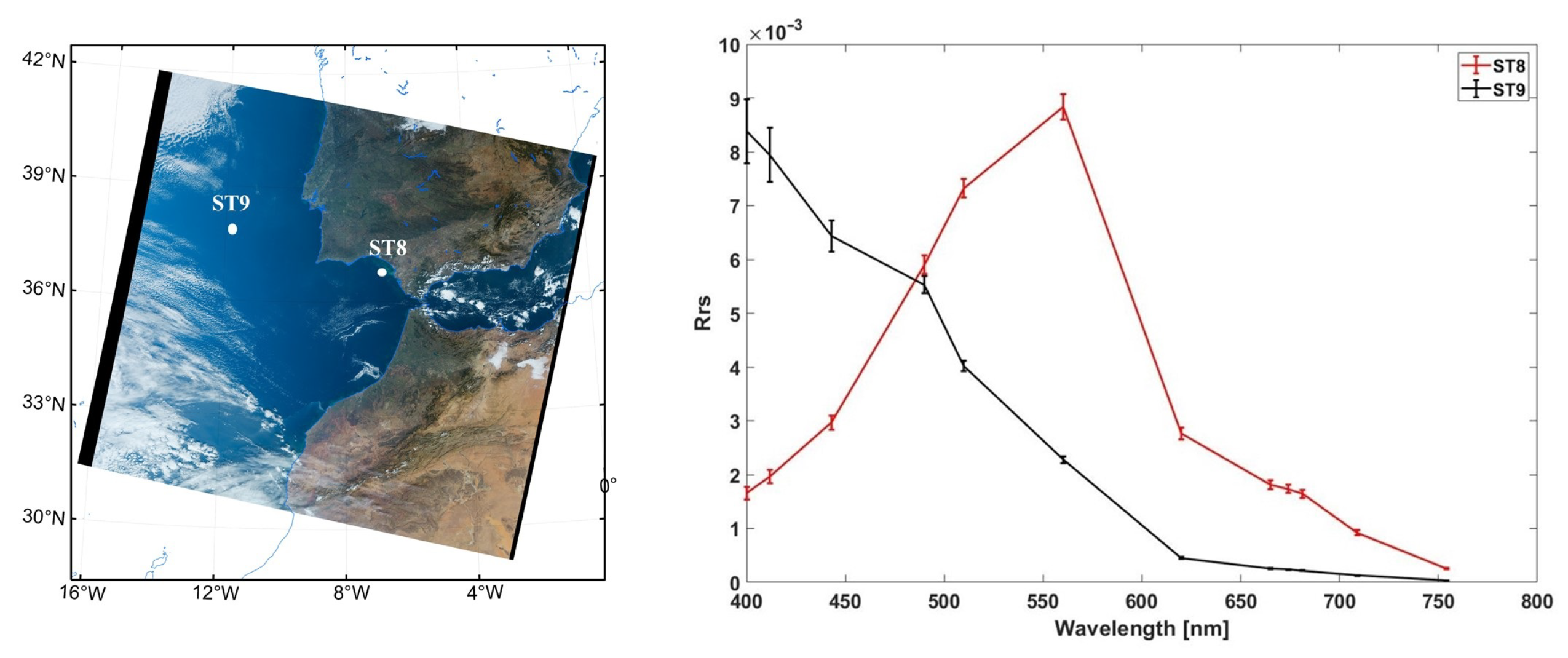
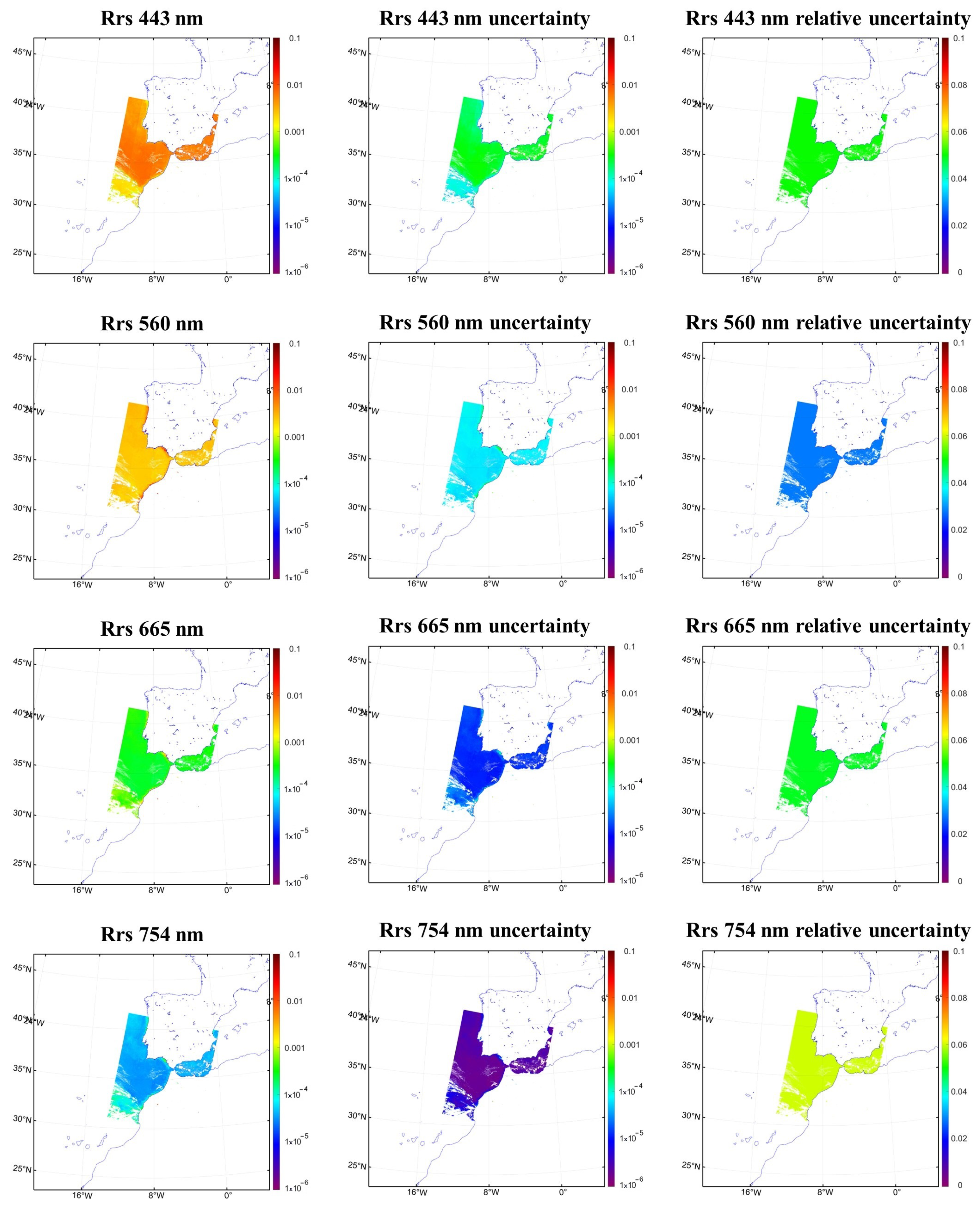
4.2. Application to Other Sensors
5. Conclusions and Perspectives
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Nieke, J.; Borde, F.; Mavrocordatos, C.; Berruti, B.; Delclaud, Y.; Riti, J.B.; Garnier, T. The Ocean and Land Colour Imager (OLCI) for the Sentinel 3 GMES Mission: Status and first test results. In Proceedings of the Earth Observing Missions and Sensors: Development, Implementation, and Characterization II, Kyoto, Japan, 30 October–1 November 2012. [Google Scholar]
- Frerick, J.; Mavrocordatos, C.; Berruti, B.; Donlon, C.; Cosi, M.; Engel, W.; Bianchi, S.; Smith, S. Next generation along track scanning radiometer—SLSTR. In Proceedings of the Remote Sensing System Engineering IV, San Diego, CA, USA, 12–16 August 2012; Volume 8516. [Google Scholar]
- Wang, M. (Ed.) Atmospheric Correction for Remotely-Sensed Ocean-Colour Products; Technical Report; International Ocean Colour Coordinating Group (IOCCG): Dartmouth, NS, Canada, 2010. [Google Scholar]
- Gordon, H.; Wang, M. Retrieval of water-leaving radiance and aerosol optical thickness over the oceans with SeaWiFS: A preliminary algorithm. Appl. Opt. 1994, 33, 443–452. [Google Scholar] [CrossRef]
- O’Reilly, J.; Maritorena, S.; Mitchelle, B.; Siegel, D.; Carder, K.; Garver, S.; Kahru, M.; McClain, C. Ocean colour chlorophyll algorithms for SeaWIFS. J. Geophys. Res. 1998, 103, 24937–24953. [Google Scholar] [CrossRef]
- Fichot, C.; Downing, B.; Bergamschi, B.; Windham-Myers, L.; Marvin-DiPasquale, M.; Thompson, D.; Gierach, M. High-resolution remote sensing of water quality in the San Francisco Bay–Delta Estuary. Environ. Sci. Technol. 2016, 50, 573–583. [Google Scholar] [CrossRef]
- Kudela, R.; Palacios, S.; Austerberry, D.; Accorsi, E.; Guild, L.; Torres-Perez, J. Application of hyperspectral remote sensing to cyanobacterial blooms in inland waters. Remote. Sens. Environ. 2015, 167, 196–205. [Google Scholar] [CrossRef]
- Platt, T.; Hoepffner, N.; Stuart, V.; Brown, C. Why Ocean Colour? The Societal Benefits of Ocean-Colour Technology; Technical Report; International Ocean Colour Coordinating Group (IOCCG): Dartmouth, NS, Canada, 2008. [Google Scholar]
- Greb, S.; Dekkler, A.; Binding, C. Earth Observations in Support of Global Water Quality Monitoring; Technical Report; International Ocean Colour Coordinating Group (IOCCG): Dartmouth, NS, Canada, 2018. [Google Scholar]
- Joint Committee for Guides in Metrology. JCGM 100: Evaluation of Measurement Data—Guide to the Expression of Uncertainty in Measurement. 2008, pp. 1–120. Available online: https://www.sci.utah.edu/~kpotter/Library/Papers/jcgm:2008:EMDG/index.html (accessed on 23 May 2023).
- Scheidt, C.; Li, L.; Caers, J. Quantifying Uncertainty in Subsurface Systems; John Wiley & Sons, American Geophysical Union: Washington, DC, USA, 2018. [Google Scholar]
- Yang, L.; Hyde, D.; Grujic, O.; Scheidt, C.; Caers, J. Assessing and visualizing uncertainty of 3D geological surfaces using level sets with stochastic motion. Comp. Geosci. 2019, 122, 54–67. [Google Scholar] [CrossRef]
- Fan, Y.; Li, W.; Gatebe, C.; Jamet, C.; Zibordi, G.; Schroeder, T.; Stamnes, K. Atmospheric correction over coastal waters using multilayer neural networks. Remote. Sens. Environ. 2017, 199, 218–240. [Google Scholar] [CrossRef]
- Fan, Y.; Li, W.; Chen, N.; Ahn, J.; Park, Y.; Kratzer, S.; Schroeder, T.; Ishizaka, J.; Chang, R.; Stamnes, K. OC-SMART: A machine learning based data analysis platform for satellite ocean color sensors. Remote. Sens. Environ. 2021, 253, 112236. [Google Scholar] [CrossRef]
- Moore, G.; Aiken, J.; Lavender, S. The atmospheric correction of water color and the quantitative retrieval of suspended particulate matter in Case II waters: Application to MERIS. Int. J. Remote. Sens. 1999, 20, 1713–1733. [Google Scholar] [CrossRef]
- Bailey, S.; Franz, B.; Werdell, P. Estimation of near-infrared water-leaving reflectance for satellite ocean color data processing. Opt. Express 2010, 18, 7521–7527. [Google Scholar] [CrossRef]
- Stamnes, K.; Li, W.; Yan, B.; Elde, H.; Barnard, A.; Pegau, S.; Stamnes, J.J. Accurate and selfconsistent ocean color algorithm: Simultaneous retrieval of aerosol optical properties and chlorophyll concentrations. Appl. Opt. 2007, 42, 939–951. [Google Scholar] [CrossRef]
- Ibramhim, A.; Franz, B.; Ahmad, Z.; Bailey, S. Multiband Atmospheric Correction Algorithm for Ocean Color Retrievals. Front. Earth Sci. 2019, 7, 116. [Google Scholar] [CrossRef]
- Thompson, D.; Natraj, V.; Green, R.; Helmlinger, M.; Gao, B.; Eastwood, M. Optimal estimation for imaging spectrometer atmospheric correction. Remote. Sens. Environ. 2018, 216, 355–373. [Google Scholar] [CrossRef]
- Steinmetz, F.; Deschamps, P.; Ramon, D. Atmospheric correction in presence of sun glint: Application to MERIS. Opt. Express 2011, 19, 9783–9800. [Google Scholar] [CrossRef]
- Doerffer, R.; Schiller, H. The MERIS Case 2 water algorithm. Int. J. Remote. Sens. 2007, 28, 517–535. [Google Scholar] [CrossRef]
- Thompson, D.; Cawse-Nicholson, K.; Erickson, Z.; Fichot, C.; Frankenberg, C.; Gao, B.-C.; Gierach, M.M.; Green, R.O.; Jensen, D.; Natraj, V.; et al. A unified approach to estimate land and water reflectances with uncertainties for coastal imaging spectroscopy. Remote. Sens. Environ. 2019, 231, 111198. [Google Scholar] [CrossRef]
- Frouin, R.; Pelletier, B. Bayesian methodology for inverting satellite ocean-color data. Remote Sens. Environ. 2015, 159, 332–360. [Google Scholar] [CrossRef]
- Feng, R.; Grana, D.; Mukerji, T.; Mosegaard, K. Application of Bayesian generative adversarial networks to geological facies modeling. Math. Geosci. 2022, 54, 831–855. [Google Scholar] [CrossRef]
- Brockmann, C.; Doerffer, R.; Peters, M.; Stelzer, K.; Embacher, S.; Ruescas, A. Evolution of the C2RCC Neural Network for Sentinel 2 and 3 for the Retrieval of Ocean Colour Products in Normal and Extreme Optically Complex Waters. In Proceedings of the Living Planet Symposium. European Space Agency Special Publication, Prague, Czech Republic, 9–13 May 2016; pp. 1–6. [Google Scholar]
- Hieronymi, M.; Muller, D.; Doerffer, R. The OLCI Neural Network Swarm (ONNS): A Bio-Geo-Optical Algorithm for Open Ocean and Coastal Waters. Front. Mar. Sci. 2017, 4, 140. [Google Scholar] [CrossRef]
- Schroeder, T.; Schaale, M.; Lovell, J.; Blondeau-Patissier, D. An ensemble neural network atmospheric correction for Sentinel-3 OLCI over coastal waters providing inherent model uncertainty estimation and sensor noise propagation. Remote. Sens. Environ. 2022, 270, 112848. [Google Scholar] [CrossRef]
- Ibrahim, A.; Franz, B.; Sayer, A.; Knobelspiesse, K.; Zhang, M.; Bailey, S.; McKinna, L.; Gao, M.; Werdell, J. Optimal estimation framework for ocean color atmospheric correction and pixel-level uncertainty quantification. Appl. Opt. 2022, 61, 6453–6475. [Google Scholar] [CrossRef]
- Zhang, M.; Ibrahim, A.; Franz, B.; Ahmad, Z.; Sayer, A. Estimating pixel-level uncertainty in ocean color retrievals from MODIS. Opt. Express 2022, 30, 31415–31438. [Google Scholar] [CrossRef]
- Stamnes, K.; Hamre, B.; Stamnes, S.; Chen, N.; Fan, Y.; Li, W.; Lin, Z.; Stamnes, J. Progress in forward-inverse modeling based on radiative transfer tools for coupled atmosphere-snow/ice-ocean systems: A review and description of the accurt model. Appl. Sci. 2018, 8, 2682. [Google Scholar] [CrossRef]
- Ahmad, Z.; Franz, B.; McClain, C.; Kwiatkowski, E.; Werdell, J.; Shettle, E.; Holben, B. New aerosol models for the retrieval of aerosol optical thickness and normalized water-leaving radiances from the seawifs and modis sensors over coastal regions and open oceans. Appl. Opt. 2010, 49, 5545–5560. [Google Scholar] [CrossRef]
- Koepke, P.; Gasteiger, J.; Hess, M. Technical note: Optical properties of desert aerosol with non-spherical mineral particles: Data incorporated to opac. Atmos. Chem. Phys. 2015, 15, 5947–5956. [Google Scholar] [CrossRef]
- Garver, S.; Siegel, D. Inherent optical property inversion of ocean color spectra and its biogeochemical interpretation: 1. Time series from the sargasso sea. J. Geophys. Res. Ocean. 1997, 102, 18607–18625. [Google Scholar] [CrossRef]
- Ruddick, K. Due Coastcolour Round Robin Protocol. 2010. Available online: https://www.coastcolour.org/documents/Coastcolour-RRP-v1.2.pdf (accessed on 1 June 2020).
- Morel, A.; Antoine, D.; Gentili, B. Bidirectional reflectance of oceanic waters: Accounting for raman emission and varying particle scattering phase function. Appl. Opt. 2002, 41, 6289–6306. [Google Scholar] [CrossRef]
- Chen, S.; Billings, S.; Grant, P. Non-linear system identification using neural networks. Int. J. Control 1990, 51, 1191–1214. [Google Scholar] [CrossRef]
- D’Alimonte, D.; Zibordi, G. Phytoplankton determination in an optically complex coastal region using a multilayer perceptron neural network. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2861–2868. [Google Scholar] [CrossRef]
- Clark, D.; Yarbough, M.; Feinholz, M.; Flora, S.; Broenkow, W.; Kim, Y.S.; Johnson, B.C.; Brown, S.W.; Yuen, M.; Mueller, J.L. Moby, a Radiometric Buoy for Performance Monitoring and Vicarious Calibration of Satellite Ocean Color Sensors: Measurement and Data Analysis Protocols; NASA Technical Report; NASA: Washington, DC, USA, 2003.
- Werdell, P.; Bailey, S.; Franz, B.; Morel, A.; McClain, C. On-orbit vicarious calibration of ocean color sensors using an ocean surface reflectance model. Appl. Opt. 2007, 46, 5649–5666. [Google Scholar] [CrossRef]
- Zibordi, G.; Melin, F.; Berthon, J.C.; Holben, B.; Slutsker, I.; Giles, D.; D’Alimonte, D.; Vandemark, D.; Feng, H.; Schuster, G.; et al. Aeronet-OC: A network for the validation of ocean color primary products. J. Atmos. Ocean. Technol. 2009, 26, 1634–1651. [Google Scholar] [CrossRef]
- Rodgers, C.D. Inverse Methods for Atmospheric Sounding: Theory and Practice; World Scientific: London, UK, 2000. [Google Scholar]
- Stamnes, K.; Stamnes, J. Radiative Transfer in Coupled Environmental Systems: An Introduction to Forward and Inverse Modeling; Wiley-VCH: Weinheim, Germany, 2015. [Google Scholar]
- Lamquin, N.; Mangin, A.; Mazeran, C.; Bourg, B.; Bruniquel, V.; D’Andon, O. OLCI L2 Pixel-by-Pixel Uncertainty Propagation in OLCI Clean Water Branch; European Space Agancy: Paris, France, 2013; pp. 1–51. [Google Scholar]
- Gilerson, A.; Herra-Estrella, E.; Foster, R.; Agagliate, J.; Hu, C.; Ibrahim, A.; Franz, B. Determining the Primary Sources of Uncertainty in Retrieval of Marine Remote Sensing Reflectance From Satellite Ocean Color Sensors. Front. Remote. Sens. 2022, 3, 25. [Google Scholar] [CrossRef]
- Jospin, L.; Buntine, W.; Boussa, F.; Laga, H.; Bennamoun, M. Hands-on Bayesian Neural Networks—A Tutorial for Deep Learning Users. IEEE Comput. Intell. Mag. 2022, 17, 29–48. [Google Scholar] [CrossRef]
- Gelman, A. Prior Choice Recommendations. 2020. Available online: https://github.com/stan-dev/stan/wiki/Prior-Choice-Recommendations (accessed on 10 December 2020).
- Hu, C.; Feng, L.; Lee, Z. Uncertainties of SeaWiFS and MODIS remote sensing reflectance: Implications from clear water measurements. Remote. Sens. Environ. 2013, 133, 168–182. [Google Scholar] [CrossRef]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pachniak, E.; Fan, Y.; Li, W.; Stamnes, K. Quantifying Uncertainties in OC-SMART Ocean Color Retrievals: A Bayesian Inversion Algorithm. Algorithms 2023, 16, 301. https://doi.org/10.3390/a16060301
Pachniak E, Fan Y, Li W, Stamnes K. Quantifying Uncertainties in OC-SMART Ocean Color Retrievals: A Bayesian Inversion Algorithm. Algorithms. 2023; 16(6):301. https://doi.org/10.3390/a16060301
Chicago/Turabian StylePachniak, Elliot, Yongzhen Fan, Wei Li, and Knut Stamnes. 2023. "Quantifying Uncertainties in OC-SMART Ocean Color Retrievals: A Bayesian Inversion Algorithm" Algorithms 16, no. 6: 301. https://doi.org/10.3390/a16060301
APA StylePachniak, E., Fan, Y., Li, W., & Stamnes, K. (2023). Quantifying Uncertainties in OC-SMART Ocean Color Retrievals: A Bayesian Inversion Algorithm. Algorithms, 16(6), 301. https://doi.org/10.3390/a16060301