1. Introduction
Traffic breakdown occurs when the speed of traffic rapidly decreases from free-flow to low speeds. When a breakdown occurs, vehicles are forced to rapidly decelerate, leading to delays and safety hazards [
1]. This speed reduction can extend to kilometers [
2]. It is a critical issue in urban areas where high volumes of vehicles often lead to breakdowns, cause traffic delays, and increase emissions. Thus, it is crucial for transportation engineers and traffic system operators to understand the causes of traffic breakdown and develop strategies to manage and mitigate it.
Researchers have conducted studies and analysis on traffic breakdown events. By analyzing the traffic flow before breakdown events, researchers have constructed probabilistic models linking the traffic flow and the probability of the occurrence of a breakdown event. As the available traffic data becomes more abundant, researchers have discovered that traffic breakdown occurrences are related not only to traffic flow rate but also to other factors. However, previous probabilistic models usually considered only one variable. With the advancements in machine learning techniques in recent years, researchers have started using neural networks to predict traffic breakdown events and have achieved high accuracy in predicting their occurrences. Given the advantages of neural networks, the model can incorporate multiple variables considering temporal and spatially correlated data. Currently, no research considers the impact of traffic flow from ramps on breakdown occurrences using neural networks.
2. Related Work
Previous studies have shown that the occurrence of traffic breakdowns is stochastic in nature [
3,
4,
5,
6,
7]. Furthermore, a breakdown event can occur at different flow levels rather than at a predetermined threshold value (i.e., capacity). In particular, the probability of a breakdown occurrence follows an ‘S’ shape as a function of traffic flow [
7]. Parametric [
5,
8] and nonparametric [
9,
10] methods have been adopted to represent the survival rate based on pre-breakdown flow rates.
Due to the diversity in traffic design and traffic characteristics specific to each location, several methods have been used to identify breakdowns in previous research. First, a speed threshold was used to identify breakdown events in [
6]. The threshold is determined for each study site based on geometric and traffic conditions. Dong and Mahmassani [
5] defined the threshold speed as 10 mph below the free flow speed. Filipovska and Mahmassani [
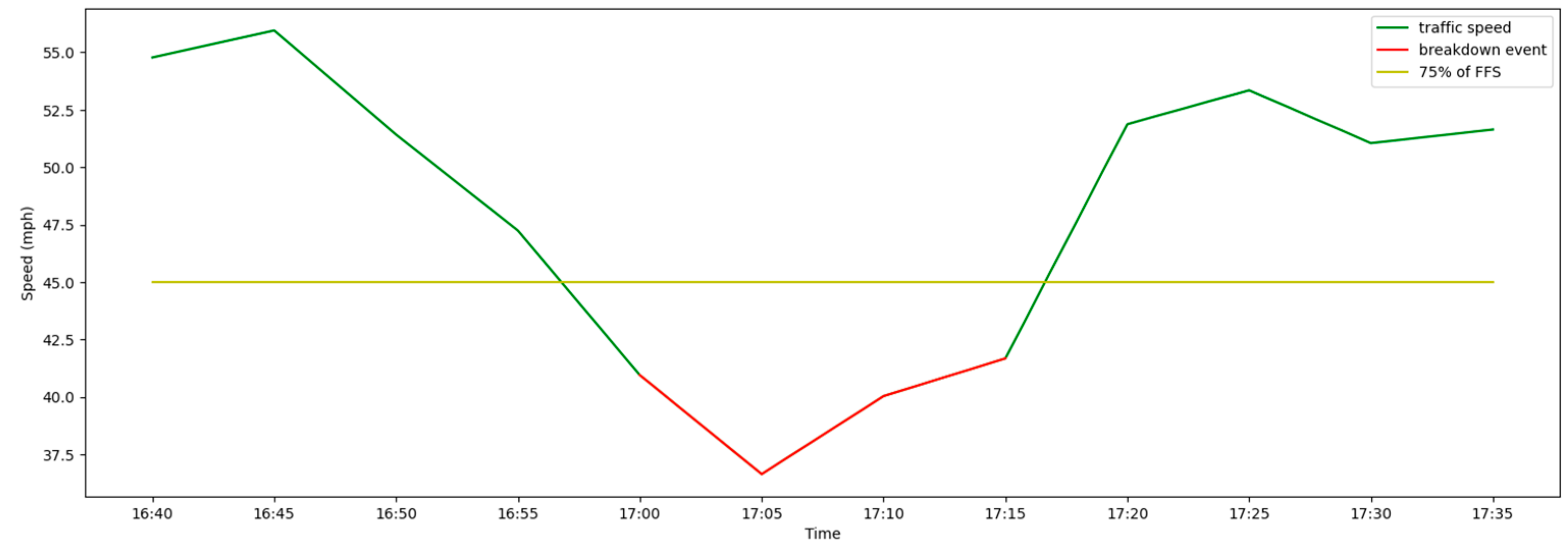
11] used a 20% threshold below the prevailing free flow speed. Second, traffic breakdowns were identified by sudden speed drops. For example, ref. [
6] proposed using a speed drop of 6 miles per hour and below 45 miles per hour in consecutive time intervals of 5 min as a threshold to detect a breakdown event. The third method, known as the volume-occupancy correlation method, identifies breakdowns by requiring a correlation between traffic volume and occupancy that satisfies a minimum threshold over a sustainable period of time [
12].
Once researchers have selected the breakdown identification method and gained access to additional data, they initiated the search for factors other than traffic volume that influence the occurrence of traffic breakdowns and found that in addition to flow rates, other factors, such as adverse weather conditions [
13], incident [
14] and merging behavior [
15] have been found to influence probabilities of traffic breakdown. Maze et al. [
13] investigated the relationship between weather, traffic density and capacity, and they found that in adverse weather conditions, drivers tend to increase their following distances and decrease their driving speeds, resulting in a decrease in throughput. This has also been supported in the research of Kamiska and Chalfen [
16]. They highlighted the direct impact of vehicle spacing on speed by simulation. Specifically, when time headway increases from 1 s to 4 s, the average travel time will experience a 35.6% increase. By constructing a probability model of traffic breakdown, they found that, at the same levels of traffic flow, the probability of breakdown occurring on a rainy day is significantly higher than on a sunny day [
4]. The other factor that has been shown to have an impact on breakdown events is incident. Wright et al. [
14] analyzed the impact of traffic incidents on travel time reliability on freeways using historical incident data. The analysis revealed that an incident on the shoulders increases the probability of traffic breakdowns because they reduce the capacity of a freeway segment and generate a temporary bottleneck. Furthermore, in the merge segments of the freeways, the traffic condition is influenced by ramp traffic. Therefore, the merging behavior and the flow rate on the ramp can affect the characteristics of traffic breakdown such as the critical flow rate and the phenomenon of congestion [
15].
Because the occurrence of traffic breakdown can be attributed to various factors, researchers have included multiple features in building breakdown prediction models. For example, speed and occupancy were used to construct a bivariate Weibull distribution to model the probability of breakdown [
17]. In recent years, machine learning algorithms have been used to predict the occurrence of breakdowns and have achieved high accuracy [
11,
18]. In particular, Filipovska and Mahmassani [
11] proposed a machine learning algorithm to predict the occurrence of traffic breakdowns considering spatial and temporal correlations in traffic data. They showed that the machine learning method outperformed the probabilistic models in terms of short-term breakdown prediction with an accuracy of 98% from the machine learning method, compared to 65% accuracy from the probabilistic model. Zechin and Cybis [
18] predicted the occurrence of traffic breakdown by building a neural network to forecast speed. Then they used the Bayesian approximation to compute the probability of the breakdown event. Their model has an accuracy of 89% in predicting the occurrence of breakdowns and can evaluate the uncertainty of the predictions.
Compared to traditional probabilistic models, the advantage of machine learning lies in its ability to accommodate more features and assess the impact of each feature on model performance through self-learning. Machine learning algorithms have been used in various aspects of the field of transportation engineering. Lu et al. [
19] combined the autoregressive integral moving average (ARIMA) and long-short-term memory (LSTM) neural network to predict the short-term traffic flow rate and achieve the average test error at 6.5%. Alqatawna et al. [
20] used ANN to estimate traffic accident frequencies and have shown that the neural network can provide results close to the true value. Although a machine learning algorithm has been used to predict the occurrence of traffic breakdowns (e.g., [
11]), previous research did not consider the traffic condition of the on-ramps when building breakdown prediction models. On-ramp traffic has been shown to have an impact on mainline traffic flow, especially when the inflow rate of ramps is high. Additionally, merging traffic tends to increase the probability of traffic breakdowns [
15,
21]. Consequently, dynamic ramp meters generally use the traffic density of the mainline as a trigger threshold to ensure that the density of the mainline remains within an acceptable range [
22]. By stabilizing traffic flow, ramp meters reduce emissions. Bae et al. [
23] compared traffic conditions before and after ramp meters were installed and demonstrated that hourly CO
2 can have 7.3% reduction. However, due to the stochastic nature of traffic breakdown, the existing ramp meter design cannot account for the probability of a breakdown.
Therefore, in this paper, neural networks were used to predict the probability of breakdown events considering the spatial and temporal characteristics of the traffic conditions of upstream segments, downstream segments, and on-ramps. By incorporating ramp flows into the breakdown prediction model, the proposed approach sheds light on the new ramp meter design aimed at reducing the probability of flow breakdown on the mainline.
The remainder of the paper is organized as follows. The next section presents the data description and traffic breakdown identification method, followed by the methodologies of feature selection, machine learning model, hyperparameter, and performance measurements. Then, a discussion of the results of model performance is presented. The final section discusses concluding remarks and future research.
4. Methodology
4.1. Overview
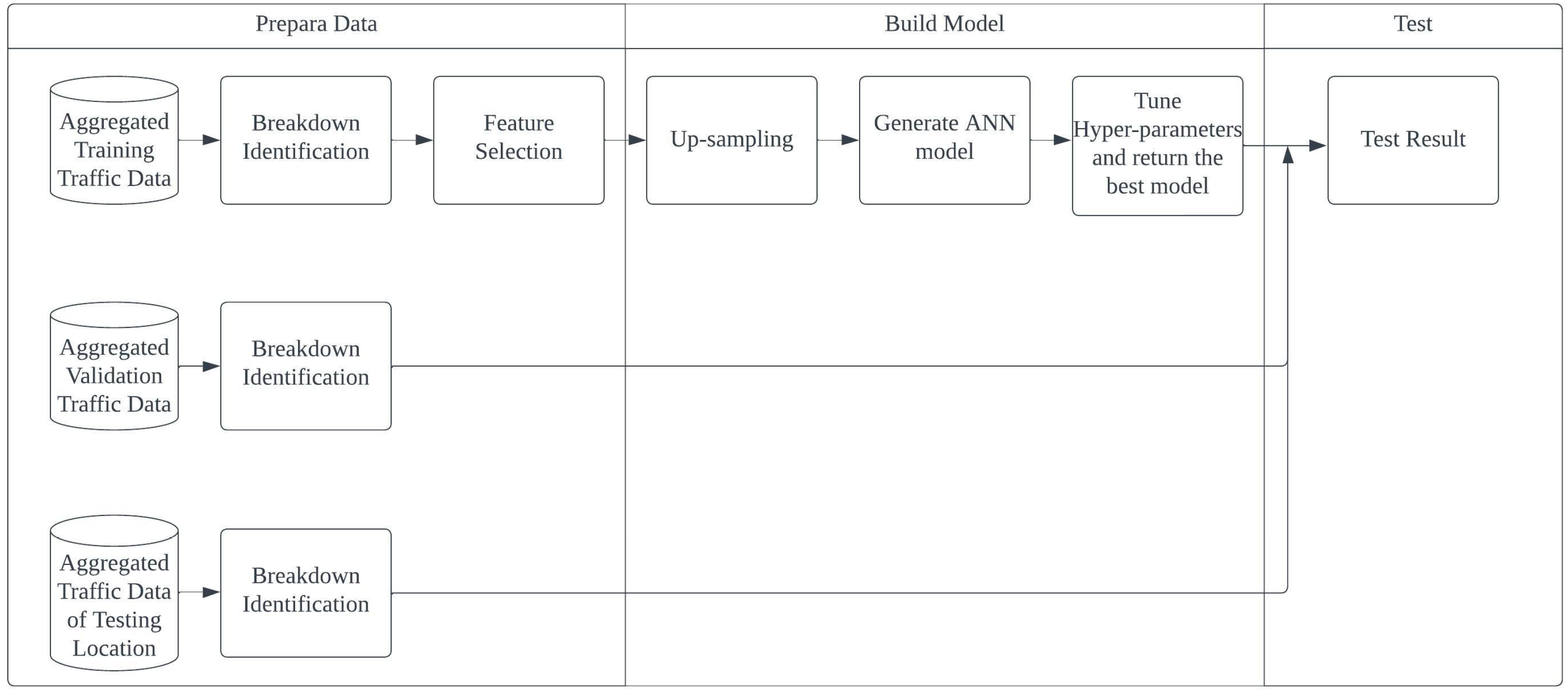
The research process is summarized in
Figure 3. After data pre-processing, feature selection is performed to determine the variables to be included in the prediction model. Then, an artificial neural network model is constructed. The hyperparameters of the ANN model are tuned to achieve maximum training accuracy. Finally, the performance of the model is evaluated by applying the optimal model to the test dataset.
4.2. Feature Selection
To improve the accuracy of the model and reduce computational costs, this study uses the Boruta feature selection method to select the variables to be incorporated into the breakdown prediction model. Boruta is a feature selection algorithm that utilizes the random forest framework to identify significant features in a data set. Compared to traditional random forests, Boruta has the advantage of not requiring manually defining the threshold of feature importance [
27]. Instead, it utilizes random forests to obtain an importance hit and selects variables with importance values higher than the hit. This approach is more effective, as it eliminates the subjective nature of manually setting a threshold and allows for a more objective and data-driven selection process. Boruta first creates shadow features that are randomized copies of the dataset and appends them to the original dataset. It then creates a random forest to obtain the importance of all features and compares the importance of the original features to the importance of the shadow ones. Original features of greater importance than the maximum importance of shadow features are considered significant. This approach provides robust feature selection results that can handle noisy and correlated data. In this paper, we employ not only the traffic data directly collected from the sensors, but also the differences between the features of the traffic data from consecutive time intervals (such as
) and adjacent segments (such as
) to analyze the impact of the changes in traffic conditions on the occurrence of breakdown events.
4.3. Artificial Neural Network (ANN)
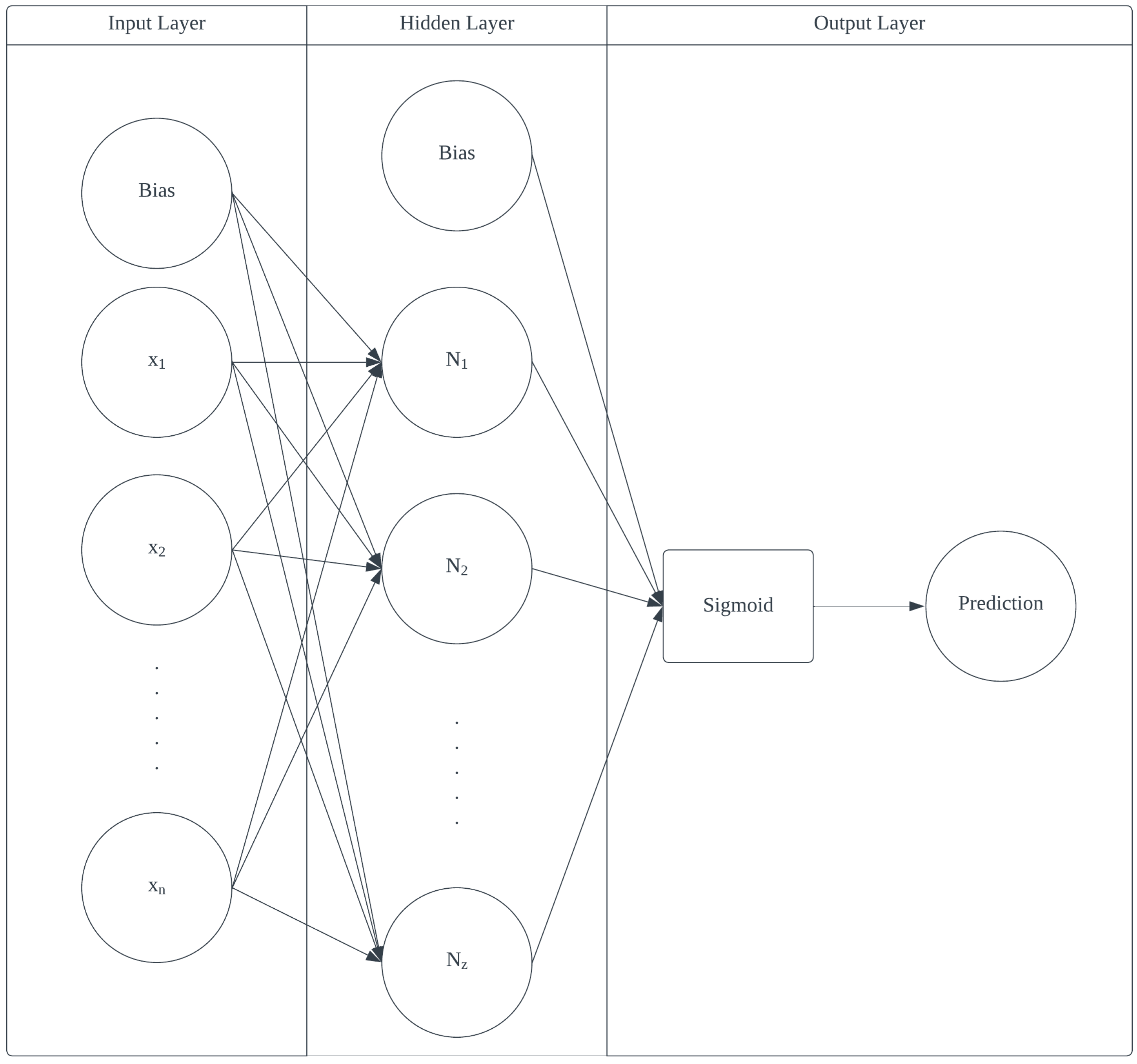
A supervised feedforward artificial neural network (ANN) is adopted to predict the occurrence of a traffic breakdown in the next time interval. The typical structure of an ANN consists of an input layer, one or more hidden layers, and an output layer.
The input layer serves as the first stage of neural network processing to receive training data. Typically, this layer includes a bias neuron, which provides the network with the ability to horizontally shift the activation function. This enables the modeling of a diverse range of input-output relationships. As a result, the number of neurons in this layer is equal to the number of input features plus one.
The hidden layers consist of multiple neurons, each of which receives inputs from the previous layer and applies a non-linear activation function to generate its output. In the hidden layer, there is also a neuron that serves as a bias. Its function is similar to that of the bias in the input layer and introduces a shift in the data. The number of hidden layers can vary depending on the complexity of the problem, but usually should not exceed two. In this paper, we purposed an ANN model that contains one hidden layer with Rectified Linear Unit (ReLU) activation function. ReLU applies the function f(x) = max (x, 0) to the input x, resulting in an output of 0 for all negative inputs and an output equal to the input for all nonnegative inputs.
The primary function of the output layer is to produce the final output of the network, which is then compared with the desired output to compute the error signal. The number of neurons and the activation function in the output layer are determined by the problem-specific characteristics. As the intended model is for binary classification, the model architecture comprises a single neuron with sigmoid activation function. The sigmoid function is commonly utilized for binary classification purposes. The mathematical expression for the sigmoid function is as follows.
The sigmoid function is an S-shaped curve and maps the input value from 0 to 1.
In the backpropagation algorithm, the error signal from the output layer is propagated backward through the network. The weights of the connections between neurons are iteratively adjusted to minimize the difference between the predicted and actual output. The proposed design of the ANN model is shown in
Figure 4.
4.4. Hyperparameter Optimization
When constructing an ANN model, pre-defined model parameters, also known as hyperparameters, are provided. Hyperparameters are variables such as the number of layers, the number of neurons in the hidden layer, the batch size, and the number of training epochs. The selection of these parameters affects the performance of the ANN model. Therefore, this paper employed the grid search approach to systematically identify hyperparameters that yield optimal performance. Before conducting a grid search, it is necessary to define the hyperparameters. The grid search then utilizes the model with predefined values to explore the model hyperparameters that yield the optimal results through training and evaluation.
Candidate values of the hyperparameters are shown in
Table 2. The horizon timestamp represents the number of time intervals before the occurrence of the breakdown. For example, when the value of the horizon timestamp is 1, the model only selects the traffic conditions from the previous 5 min before the breakdown to predict the probability of event occurrence. When the value is 2, the model will use the information from the previous 10 min.
4.5. Performance Measures
The confusion matrix is adopted to assess the accuracy of the classification model. The confusion matrix, as shown in
Table 3, indicates the classification accuracy of a model using four metrics known as true positives, true negatives, false positives, and false negatives.
True Positive (TP): instances correctly identified as positive class.
True Negative (TN): instances correctly identified as the negative class.
False Positive (FP): instances incorrectly identified as positive class whereas the true label is negative.
False Negative (FN): instances incorrectly identified as negative class, whereas the true label is positive.
Using the confusion matrix, we can calculate the accuracies of each label and the overall accuracy, as follows.
The accuracy of the positive label can be calculated as TP/(TP + FP).
The accuracy of the negative label can be calculated as TN/(FN + TN).
The overall accuracy of the model can be calculated using (TP + TN)/(TP + FP + FN + TN).
6. Conclusions
Traffic breakdown disrupts the stable flow of traffic on the freeway. Merging traffic on the ramp tends to reduce traffic speeds on the mainline, potentially leading to traffic breakdown. Therefore, an ANN-based model is proposed to predict the occurrence of traffic breakdowns on freeways considering the impact of adjacent road segments and ramps.
The ANN model uses spatial and temporal traffic data from mainline and on-ramps to predict the occurrence of traffic breakdowns. The Boruta feature selection method is used to select features to construct the ANN model. Specifically, the Boruta method recommends including on-ramp traffic volume, speed, and occupancy as input variables, as they are strongly associated with the occurrence of traffic breakdown on the mainline. When the training accuracy obtained from the grid search method is compared, the number of neurons in the hidden layer, the batch size, and the number of previous timestamps required for the model are determined and used in the final ANN model.
The results show that the proposed ANN model has the ability to predict the occurrence of a traffic breakdown event with high accuracy. The ANN model can be applied by transportation agencies for ramp meter activation, as the results of feature selection indicate that traffic from the on-ramps has a significant impact on the occurrence of traffic breakdown. Based on ANN-based prediction of traffic breakdown events, transportation agencies can use real-time traffic data and regulate ramp metering rate to mitigate the impact of the breakdown or prevent it from occurring. Therefore, this mechanism provides a new approach to designing ramp metering systems. Another potential application for the proposed model is the travel information system. By predicting the occurrence of traffic breakdowns, the travel information and navigation system can alter the routes of drivers. Furthermore, if the model predicts that traffic breakdown is occurring, this information can be provided to the safety service patrol, allowing them to deploy proactively to the location where the breakdown is likely to occur.
7. Limitation and Future Work
This study has several limitations. First, the methodology can only be applied to locations with stationary sensors. Other data forms, such as probe-based data, cannot be utilized directly. Second, the model parameters incorporate data from both upstream and downstream sensors. If the distance between adjacent sensors is too far, the correlation may decrease, resulting in loss of the prediction accuracy of the model. In addition, special events or incidents are not excluded from the dataset. These events can act as outliers in the model, and excluding them would improve the model performance. Lastly, if the research time period is extended to the entire year, it would be necessary to consider weather factors in both feature selection and model generation.
Future studies include investigating additional parameters, such as special events and weather factors, that have an impact on the occurrence of traffic breakdowns; constructing the mode using alternative data type; enhancing the existing neural network model or exploring alternative approaches to improve the accuracy of estimation; and extending the model to other locations to evaluate model performance in other scenarios. Ultimately, this work will provide an activation trigger for any ramp meter to alleviate traffic breakdown.








{kind=link}
{kind=link}
{kind=link}
{kind=link}