1. Introduction
Inverse problems are a special class of mathematical problems where the focus is on inferring causal relationships from the set of observations. These problems are often ill-posed and suffer from various numerical issues [
1], however, are encountered extensively in different fields of science and engineering. In the past few decades, there has been a plethora of research on solving these problems [
2,
3,
4].
A subclass of inverse problems, where, the interest is in estimating the right-hand side, or “source term”, of a governing equation, is known as inverse source problems (ISP). ISPs arise frequently in several domains of physics and engineering, a few noteworthy examples are the following: Optical Molecular Imaging (OMI), where the spatial distribution of bio-luminescent and fluorescent markers in the human tissues is reconstructed from light-intensity measurements [
5,
6]; Radiative Heat Transfer, where temperature distribution of a medium is reconstructed from radiation intensity measurements and medium properties [
6]; Magnetoencephalography (MEG) and Electroencephalography (EEG), where surface electrical and magnetic current measurements on the head are used to determine the source of brain activity [
7,
8].
In this paper, we study one such ISP known as the dynamic load identification problem. Here, we attempt to recover the ‘forcing function’ or ‘excitation force’ of linear and non-linear oscillators from the dynamic response data. This problem can be solved both in the time and frequency domains; however, in this study, we adopt the time domain approach owing to its simplicity and straightforwardness.
In the past few decades, plenty of research has been published discussing various approaches to solving this problem, and it will be difficult to enumerate them all given the scope of this paper; nonetheless, a few notable mentions are as follows. Huang [
9] used the conjugate gradient method to estimate the time-dependent forces in a non-linear oscillator. Ma et al. [
10] developed a recursive estimator based on the Kalman filter to determine the impulsive load from the measurement data for the single and multi-degree-of-freedom systems. In another interesting work by Azam et al. [
11], the authors proposed a dual Kalman filter for estimating the full states of a linear multi-degree of freedom system with unknown input from a limited number of noisy acceleration measurements and a known physical model. Ref. [
12] formulated the force identification problem of the duffing oscillator as a Volterra-type integral equation of the first kind and used the regularization technique to stabilize the solution. Feldman [
13] proposed a method for predicting forces only from response data without the need for any parametric or governing equation information using the Hilbert transform. Ref. [
14] solved the non-linear force identification problem in the frequency domain using ordinary least squares with Tikhonov regularization and its variants. Liu et al. [
15] solved the non-linear vibration problem by transforming the non-linear ordinary differential equations into parabolic ordinary differential equations due to their robustness against large noise. Recently, Rice et al. [
16] proposed a calibration-based integral formulation for estimating the forcing function in the spring mass damper system from response data. For a detailed review of past and present literature on dynamic load identification techniques, interested readers are advised to refer to [
17].
In recent years, there has been a significant interest in applying machine learning and deep learning techniques for load identification. Pravin and Rao [
18] proposed a technique for recovering the input forces from acceleration time history using dynamic principal component analysis. Zhou et al. [
19] used a deep Recurrent Neural Networks (RNNs) technique with two variants of Long Short Term Memory (LSTM) to recover the impact loads on non-linear structures from response data. They tested their architecture on a damped duffing oscillator subjected to an impact load expressed by normal distribution function and on a composite plate. Another work [
20] proposed RNN with different architecture, but this work was mainly focused on recovering the forces on beam structure excited by harmonic, impact, and random forces. In another work by Luca Rosafalco et al. [
21], the authors implemented a deep learning based autoencoder for load identification, for structural health monitoring, from multivariate structural vibration data. They employed residual learning and inception modules in their autoencoder network. Ref. [
22] proposed an ANN based on Bayesian Probability Framework to estimate the forces from the displacement responses.
In spite of the massive success of deep learning techniques in tackling a variety of problems owing to their ability to explore vast design space and to manage ill-posed problems, deep learning predictions are oftentimes physically inconsistent and generalize poorly [
23]. However, this behavior can be alleviated to some extent by embedding various biases; one way of achieving this is by infusing the governing equation in the loss function of a neural network as proposed by [
24], known as a “physics-informed neural network (PINNs). Recently, PINNs have been used to solve inverse source problems; one such account is the paper by He et al. [
25]. In this work, the author utilized PINNs to predict the spatially and temporally varying heat source from the simulated temperature data with good accuracy. In this work, we use the PINNs approach for estimating the forcing function of one degree of freedom system.
Recently, two studies [
26,
27] have been published where the authors utilized machine learning and physics information to solve the vibration problem. The former used the Hilbert transform and a variant of the least-squares method to estimate the non-linear restoring force in a bi-stable structure, and the latter used PINNs to solve forced vibration and plate vibration problems.
Haghighat et al. [
27] also used PINNs to solve forced spring mass damper systems similar to ours, but their work was mostly about predicting the displacements for a future time step and natural frequency, whereas our approach is more focused on estimating the excitation forces. We propose PINNs to estimate harmonic or non-harmonic and periodic or aperiodic forcing functions for systems with one degree of freedom subjected to various initial conditions.
Although in this work our attention is on oscillators as a mechanical system, to our understanding, this work also has the potential to be applied to any systems governed by linear or non-linear ordinary differential equations in different domains.
The remainder of the paper is organized as follows: In
Section 2, we talk about the mathematical model of duffing’s equation followed by
Section 3 where we discuss the structure of our neural network and share details about the training process. Later, in the following
Section 4, we share our findings and finally conclude this paper with
Section 5 and
Section 6 with discussions and conclusions, respectively.
2. Mathematical Model
Duffing’s equation is a nonlinear ordinary differential equation used to model the approximate behavior of various physical systems, such as nano-mechanical resonators [
28], ultrasonic cutting systems [
29], piezo-ceramics under influence of a magnetic field, and, the flight motor of an insect [
30], to name a few. One formulation of Duffing’s equation is given by
Here,
is the solution to a differential equation. Initial conditions are given by
and
,
is the amount of damping,
is linear stiffness,
is the amount of non-linearity, and
is the forcing function. By rearranging and fixing different values of coefficients, i.e.,
in Equation (
1), the governing equation of various linear and non-linear oscillators can be derived. For a detailed mathematical treatment and understanding of Duffing’s equation, interested readers are advised to refer to [
31].
In this work, we are going to recover from the simulated measurement of , its derivative , and initial conditions using artificial neural network (ANN) and governing equation information. This is different than solving in a forward manner, where we typically solve the differential equation analytically or numerically, to get the solution given and initial conditions.
3. Methodology
In this section, we discuss the structure of the neural network (NN) that was used, followed by details on the loss function, and later, sum up the section by shedding some light on the training algorithm and process that was employed.
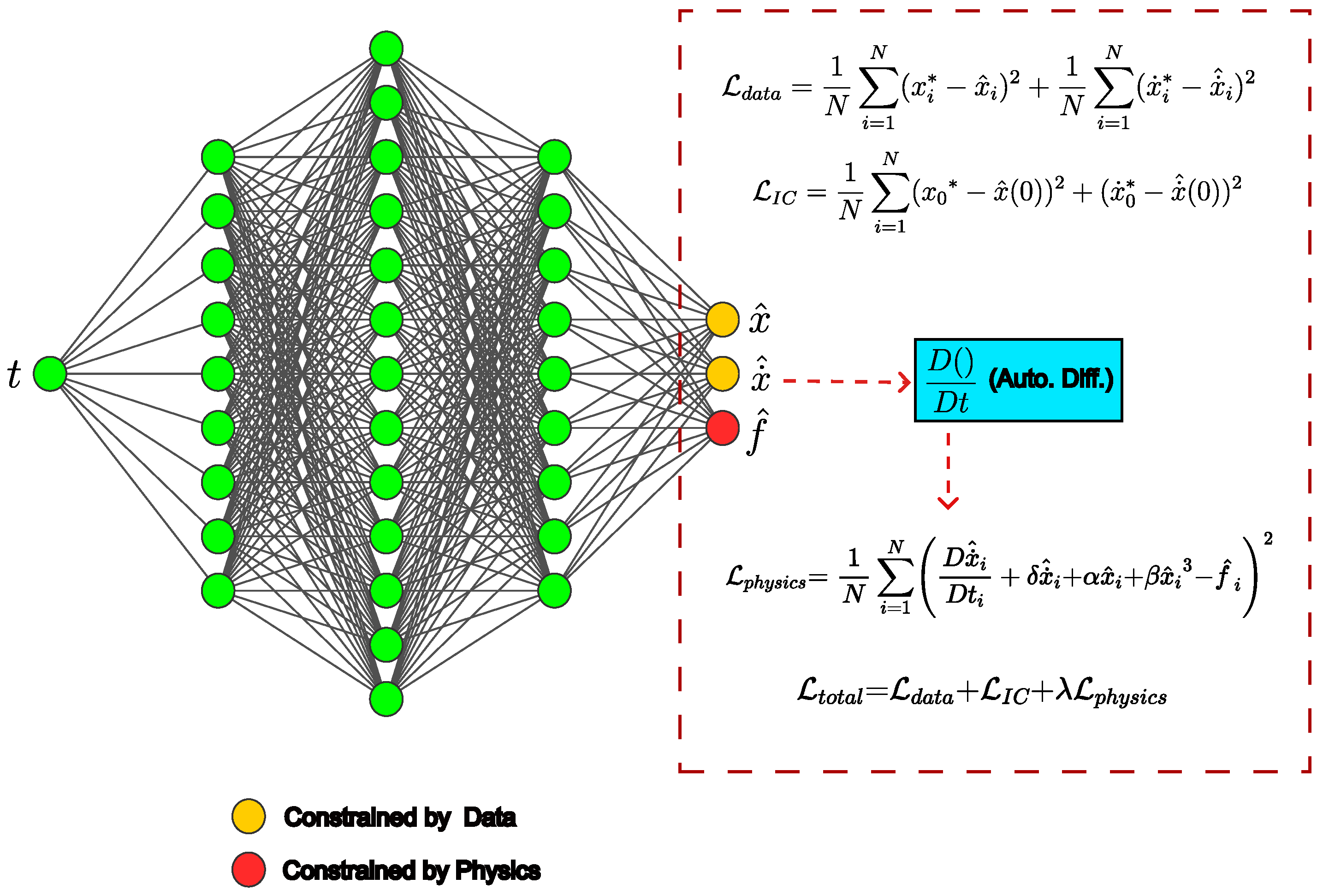
3.1. Structure of NN
The structure of NN is shown in
Figure 1 and mathematically is represented by
where the function
represents the neural network with
L number of layers;
is the input and
,
,
are the outputs;
and
are the neural network parameters. The architecture was defined in this way since it makes the differentiation of NN output with respect to input more manageable. Differentiation was performed using Automatic Differentiation (AD) with the help of the TensorFlow [
32] library functions.
The NN is feed-forward in a sense, such that the first layer is an input to the second, and the second to the next, and so on until the last layer. This can be represented by the composite equation below,
where
j is the layer number,
is the activation function which adds non-linearity to the NN, and
and
are weights and biases of the specific layer.
For example, a 4-layer neural network, i.e.,
, can be represented by
where
and
. The output of NN,
is constrained by the physical model and
,
are constrained by the displacement and velocity data, respectively. This is discussed in more detail in the
Section 3.2.
The proposed NN architecture was developed using the Keras [
33] library with a TensorFlow backend. It consists of
layers with [1,15,30,60,120, 240,120,60,30,15,3] units each. The batch normalization layer is present alternately after every dense layer and, each dense layer is passed through the eLU activation function, which adds the non-linearity to the network.
The optimal hyper-parameters were determined by performing systematic hyper-parameter tuning, which involved exploring different combinations of neural network architectures, initialization methods, activation functions, learning rates, and number of epochs. Initially, a shallow network with a smaller number of trainable parameters and ReLU activation function was used, but this did not yield satisfactory results. Subsequently, other activation functions were experimented with, and it was found that the eLU activation function produced better results. Finally, a deeper architecture with eLU activation function was employed. Similar experiments were conducted to identify other optimal hyper-parameter choices. Additional optimal hyper-parameters choices used in study are discussed in the
Section 3.3.
3.2. Loss Function
The workhorse of our approach is the way the neural network loss function is defined. The total loss
is composed of the data term
,
and the physics loss term
:
such that
and
Here, and are the displacement and velocity from the data, and are displacement and velocity predictions from the neural network, represents the regularization term, and are the initial conditions.The task of and is to constrain the neural network predictions using the data.
The physics loss
term is where the physics information is infused into the neural networks and is given by,
This equation is obtained by rearranging Equation (
1) and replacing velocities and displacements with their equivalent neural network predictions. For calculating the acceleration from velocity prediction, we make use of automatic differentiation, which is represented by
in the above equation. The job of
is to force the
to take values that obey the governing equation.
3.3. Training
The objective of the proposed NN architecture is to recover the forcing function, , from the displacement and velocity data. The training algorithm is shown below (refer to Algorithm 1). Inputs to the algorithm are t, ,, i.e., time, displacement, and velocity data. The NN takes in t and outputs , i.e., forcing function, displacement, and velocity predictions, respectively. The weights of the neural network are initialized using He-Normal initialization.
The network was trained on 500 data points in batches of 250 points on NVIDIA GTX 2060 GPU for 60,000 epochs. The training time for all the training instances was around 3 to 3.5 h approximately. The learning rate was chosen as 0.001 and the regularization term was chosen as either 0.1 or 0.01 depending on which provided a better result.
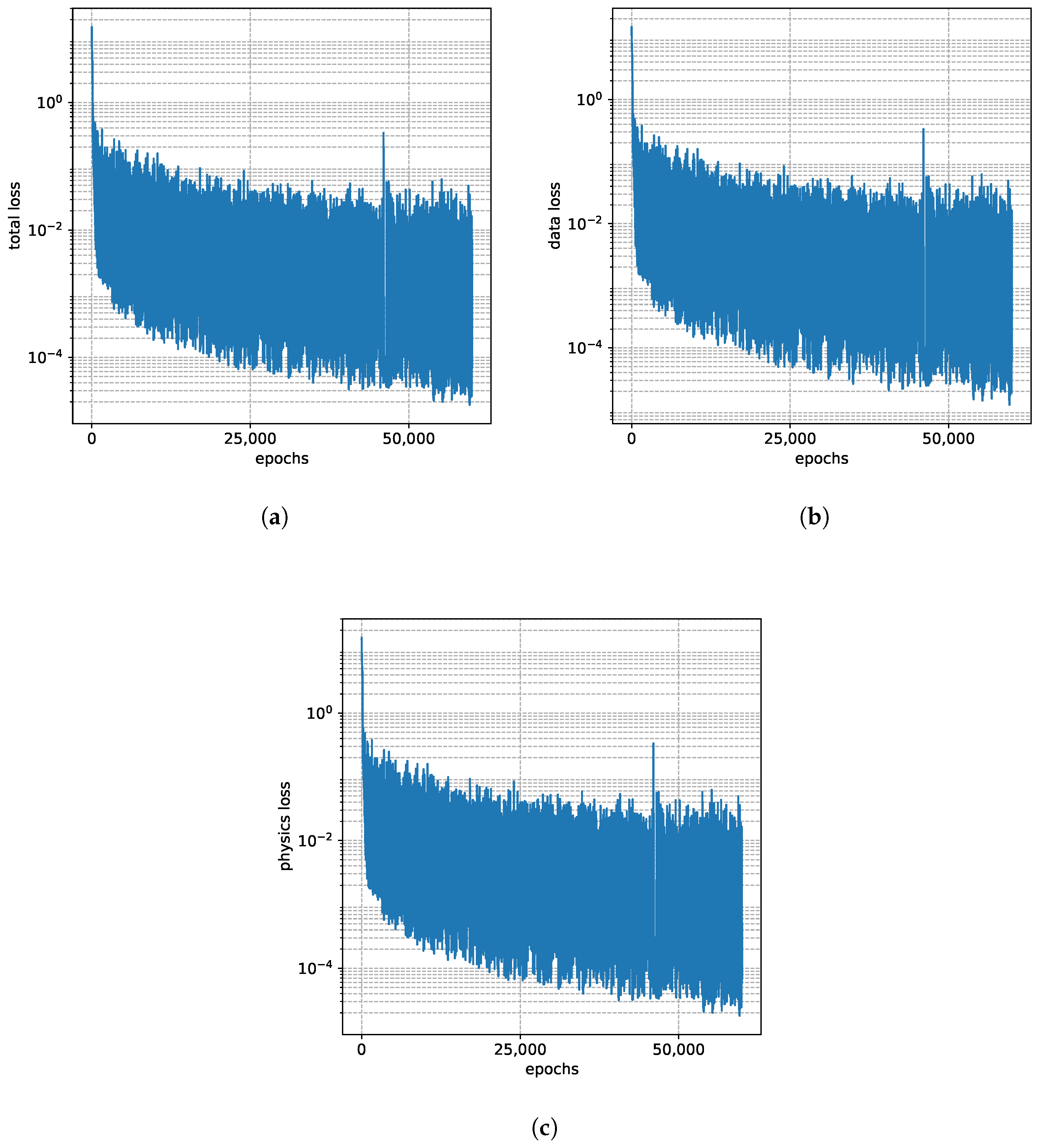
At each epoch, the
is calculated from the data and neural network predictions. Later, Adam optimizer [
34] takes in
and calculates its gradients with respect to NN parameters and propagates them to the network using the back-propagation algorithm. This algorithm uses these gradients to adjust the weights and biases of the network at every epoch. A snapshot of
,
and
progression with respect to epochs for one training instance is shown in the
Figure 2. Ideally, for the neural network to learn successfully
, which can be observed in the
Figure 2 below.
| Algorithm 1 Training Algorithm |
Require: t, ,
Ensure:
no. of epochs
learning rate
batch size
regularization
while do
▹ This is calculated using (6)–(8)
Adam()
end while |
5. Discussion
In
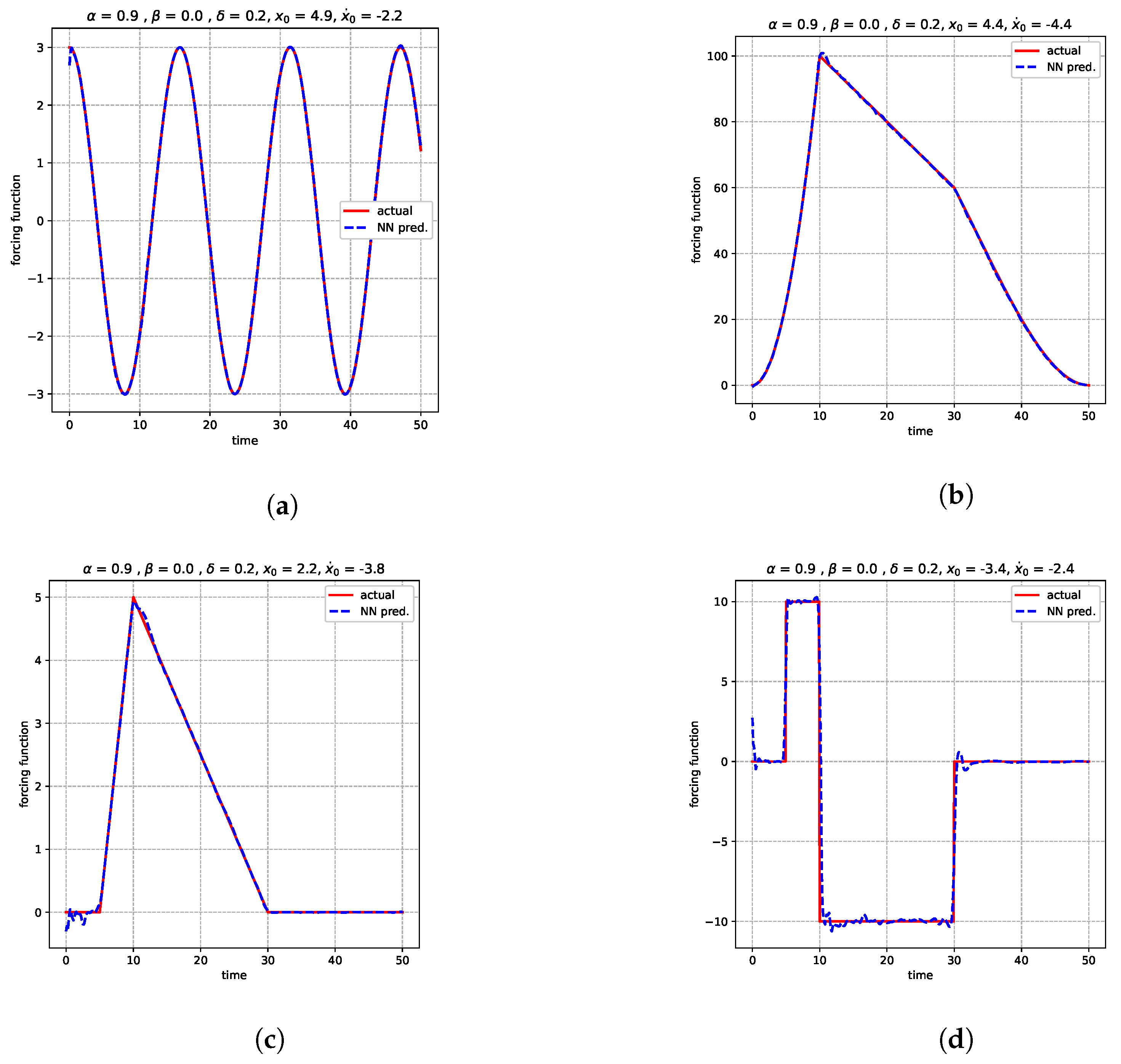
Section 4 we shared our findings that demonstrated the effectiveness of our proposed neural network approach for solving the inverse source problem of dynamic load identification by incorporating physics information. The neural network structure and best working hyper-parameter choices were obtained by performing systematic hyper-parameter tuning. The network was later trained on different data instances generated by simulating spring mass damper systems subjected to different types of forcing functions, including smooth, abrupt changes in gradient, and jump discontinuities.
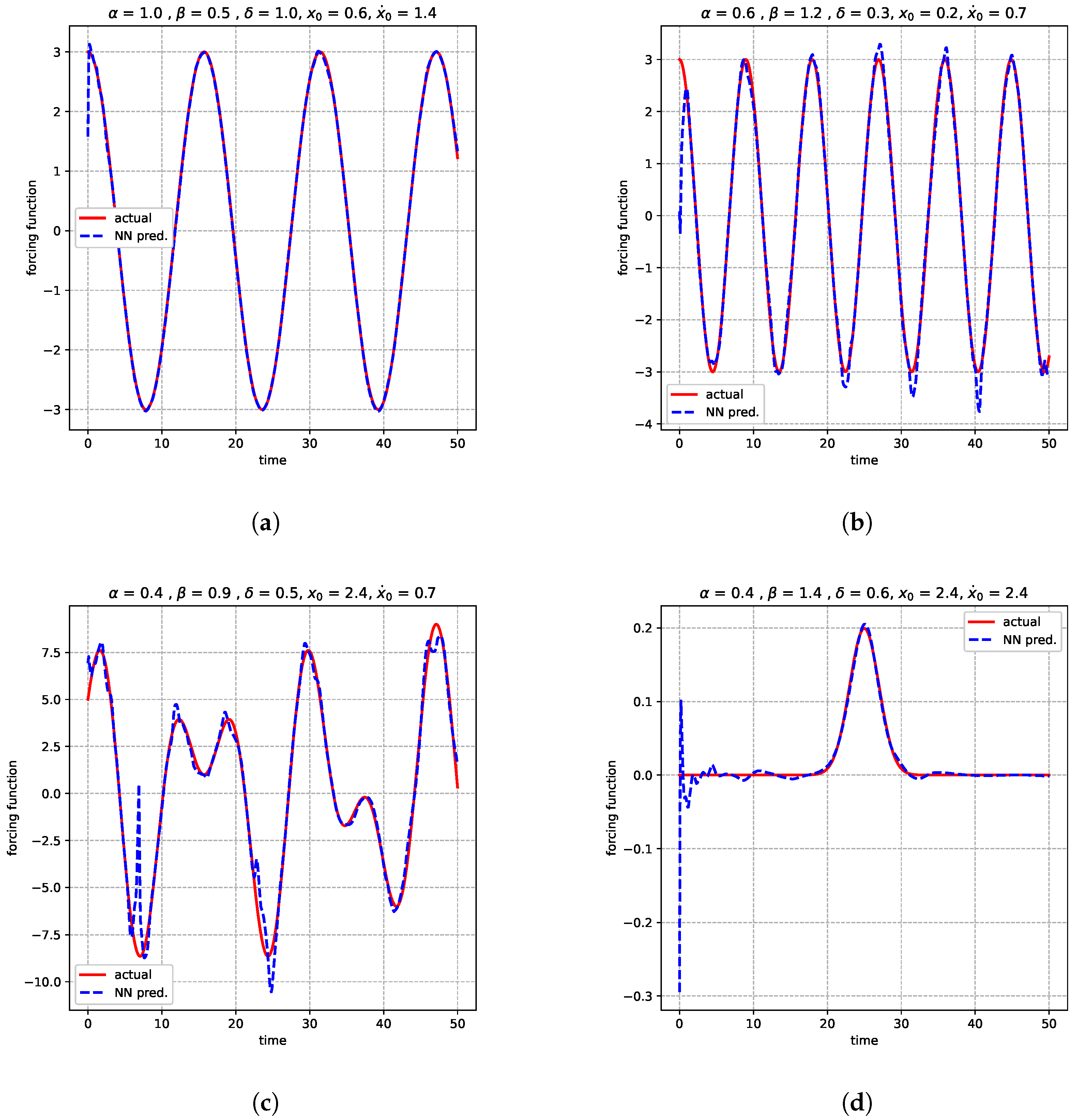
The neural network predictions in all cases were excellent, with slight overshoot and undershoot at the cusp of both piece-wise functions and some small oscillations at the start of the triangular function. However, some numerical oscillations were observed in step function predictions that resemble the Gibbs phenomenon. The findings suggest that the proposed neural network approach was effective in predicting different types of forcing functions.
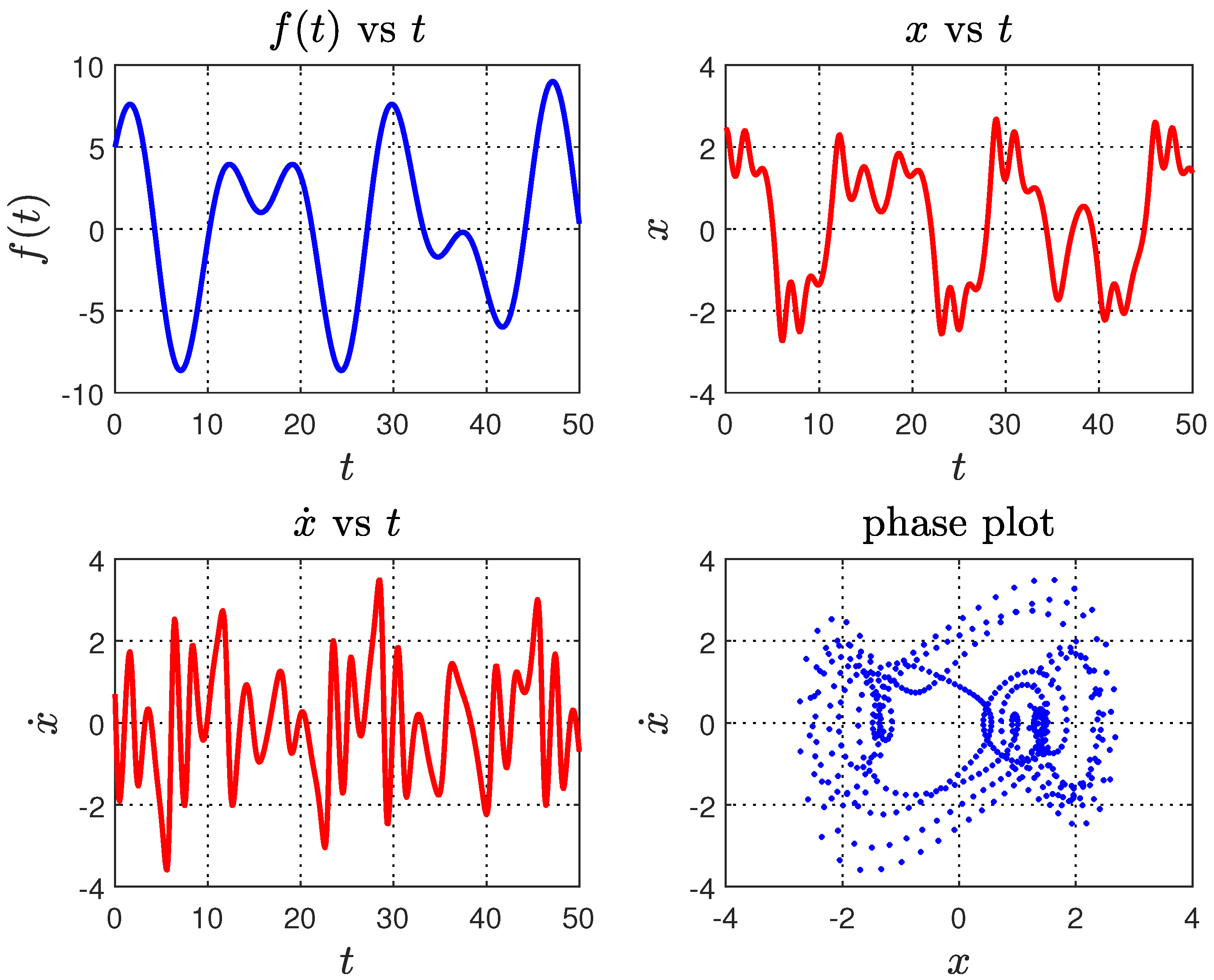
The study also tested the network to recover the forcing functions of non-linear oscillators from the data. The data were generated by solving duffing equations subjected to various smooth forcing functions. The network was able to predict sinusoidal functions and sinusoidal functions with increased non-linearity and frequency with small amounts of instability and minor overshoot and undershoot at the peak and trough of the periodic function.
Finally, the network was used to predict functions given by the sum of two sinusoidal functions and an impulse, and the network prediction was in close agreement with the actual function. However, some under and over-predictions with small oscillations were observed at the peaks and valleys of the functions in the case of the sum of two sinusoidal functions. In the case of a forcing function involving an impulse, numerical oscillations were observed at the start that dampened out in the later stages of predictions.
Overall, the findings of this study demonstrate that the proposed technique works well in predicting a variety of forcing functions from response data, although, only smooth functions were considered in the case of non-linear oscillators. Additionally, the analysis was based on simulated data without any noise used to train the neural network. Future studies should investigate the effectiveness of this technique using real-world data with noise and compare its performance with other established techniques for dynamic load identification.
6. Conclusions
In this paper, we presented an approach for solving the dynamic load identification problem using neural networks and physics information. We started our analysis by testing the efficacy of our architecture in recovering the forcing functions of the spring mass damper system and finally extending it to non-linear oscillators.
In our analysis of the spring mass damper system, we trained our neural network to recover different types of functions from the data, and it was found that our network was able to seamlessly recover them without much difficulty. Later on, we tried the same for the non-linear ODEs. In the case of non-linear ODEs, we primarily focused on smooth functions, and it was observed that our method was able to recover almost all of the functions, but with minor numerical oscillations at different places.
Though this work was predominantly focused on predicting the source terms of ODEs with mechanical systems in mind, to the best of our understanding, this has the potential to be applied to any system where the interest is in finding the source term from response data.
In the future, this work can be extended by testing whether the architecture can recover discontinuous forcing functions of non-linear ODEs and if similar predictions can be made from data that are corrupted by noise. Also, a similar study can be undertaken for recovering both smooth and discontinuous forcing functions in a multi-degree of freedom system. Another possibility is to test if our neural network architecture can predict the forcing function just from one set of data, i.e., displacement or velocity.
Finally, this work was focused on recovering the forcing function of a specific ODE from its data instances. However, a surrogate model can also be developed that can be trained on huge sets of data and, after training, can predict the forcing function for any instance of a linear or non-linear ODE from its response time histories and initial conditions.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




