1. Introduction
A crucial part of making cities more sustainable is the transition from private transport methods to public modes of transport. In cities with existing transport networks, this means that operators need to make their services more attractive to potential passengers. For many patrons, convenience is a key area for improvement [
1]. Therefore, it is crucial to improve the estimated arrival time (ETA) predictions, which allow passengers to better plan their journeys. Especially in the case of bus networks, passengers rely heavily on Real-Time Passenger Information (RTPI) systems at bus stops, online, and in mobile apps. Such RTPI systems can be unreliable [
2], thus making the bus less attractive as a mode of transport. The UK has seen a steady decline in bus patronage since records began in 1985; bus travel has decreased by a total of 0.7 billion journeys [
3]. Because local buses in most areas can only be replaced by private vehicles, this suggests that more passengers opt for their private cars, which can be seen in the steady increase in car traffic on British roads [
3]. Taking into account the environmental and social impact of congestion, which causes a substantial waste of energy and human time, this is a troubling trend. Data for 2018/19 show that 4.8 billion bus trips were made in the UK, 58% of all public transport trips [
3]. In sum, these travels correspond to an estimated 27.4 billion kilometres travelled and saved approximately 96 million tonnes of CO
2 [
4]. In a recent study, the social costs of owning a privately owned SUV were estimated to be close to EUR 1 million if the costs associated with pollution, infrastructure maintenance, and climate are taken into account. This study highlights that the ownership of private vehicles is associated with substantial costs to society and should therefore be reduced [
5]. This highlights the importance of making bus networks as attractive as possible to attract travellers who are currently using private cars. If this is achieved, not only will it have a positive environmental impact but will also alleviate congestion issues in urban areas. Additionally, the pandemic has had an impact on the usage of public transport, and operators must restore public confidence in the safety of this mode of transport. Alongside these efforts, reliable ETA predictions will make a difference in the perceived passenger convenience of public transport [
6].
We previously noted that the latency of data transmission from buses is caused by the delay in the wireless network infrastructure and the fact that the data in our operational area passes through a number of third-party systems [
7]. Consequently, the RTPI system may suggest that the vehicle is further away from a bus stop than it is in reality.
The literature contains a wide range of approaches to predict bus ETAs. These range from more conventional methods such as historic averages [
8,
9], ARIMA [
10] or Kalman Filters [
11,
12,
13,
14,
15,
16]. In general, such methods have low predictive power, and the introduction of Neural Networks (NN) drastically improved the performance of ETA predictions [
14,
15,
16]. In the more recent literature, NN-based approaches have taken centre stage with some impressive results [
17], however, further improvements compared to NNs were achieved using hierarchical NNs [
18]. A particular focus can be found on RNN structures due to the sequential nature of ETA prediction problems. These methods include Long Short Term Memory (LSTM) networks [
19], bidirectional LSTMs [
20] or even convolutional LSTMs [
21]. However, much more complex methods have become more common and tend to use different types of models for different aspects of the prediction task [
22,
23,
24]. As there is no limit to the complexity of an ETA model somewhat more exotic methods, such as the artificial bee colony algorithm are also represented in the recent literature [
25].
As a continuation of our previous work, we investigated possible architectural solutions to capture the interconnectedness of public transport networks and its effects on the accuracy of the prediction. All urban transport networks are, as the name suggests, networks consisting of directly or indirectly connected routes. Disruptions in a specific part of the network can have an impact on vehicles in different areas of the system [
26]. Therefore, it is expected that any prediction that is made based on either the entire network or a more extensive part of the network could improve ETA and other predictions. Some examples that address a similar approach are studies that include vehicles on the same route in their prediction, allowing any algorithm to have a better view of the state of the network and thus improving prediction accuracies [
27,
28,
29]. To the best of the author’s knowledge, only one study used true network-based information including some short-term historical data from the entire network in their ETA predictions [
30]. Examples from freight networks are more common and have demonstrated that a prediction based on multiple network-based models can improve ETA predictions [
31,
32]. Another example demonstrates a similar approach for the prediction of taxi ETAs [
33].
In sequential data, such as language translation, the so-called attention mechanisms can significantly improve predictive performance. The underlying idea is that the attention head will learn the importance of the order of words in a sentence and will focus more on the important parts of the query. In practice, this is achieved by using an encoder-decoder model with either an attention mechanism in between or a flavour of the attention head that doubles as a decoder. Various versions of attention mechanisms have been described in the recent literature [
34,
35,
36].
In this study, we present a working concept of a model architecture allowing to leverage the state of an entire transport network to make ETA and next-step predictions. To this end a combination of an attention mechanism with a dynamically changing recurrent neural network (RNN) based encoder library. This study presents a pilot investigation into the suitability of this novel model architecture but does not claim superiority. The findings in this study should be considered as a possible and promising avenue for further research into this novel architecture.
2. Methods—Data Processing
To avoid confusion, the term “network” will be used for bus networks and road networks, and all neural networks are hereafter referred to as “models”.
2.1. Data Collection
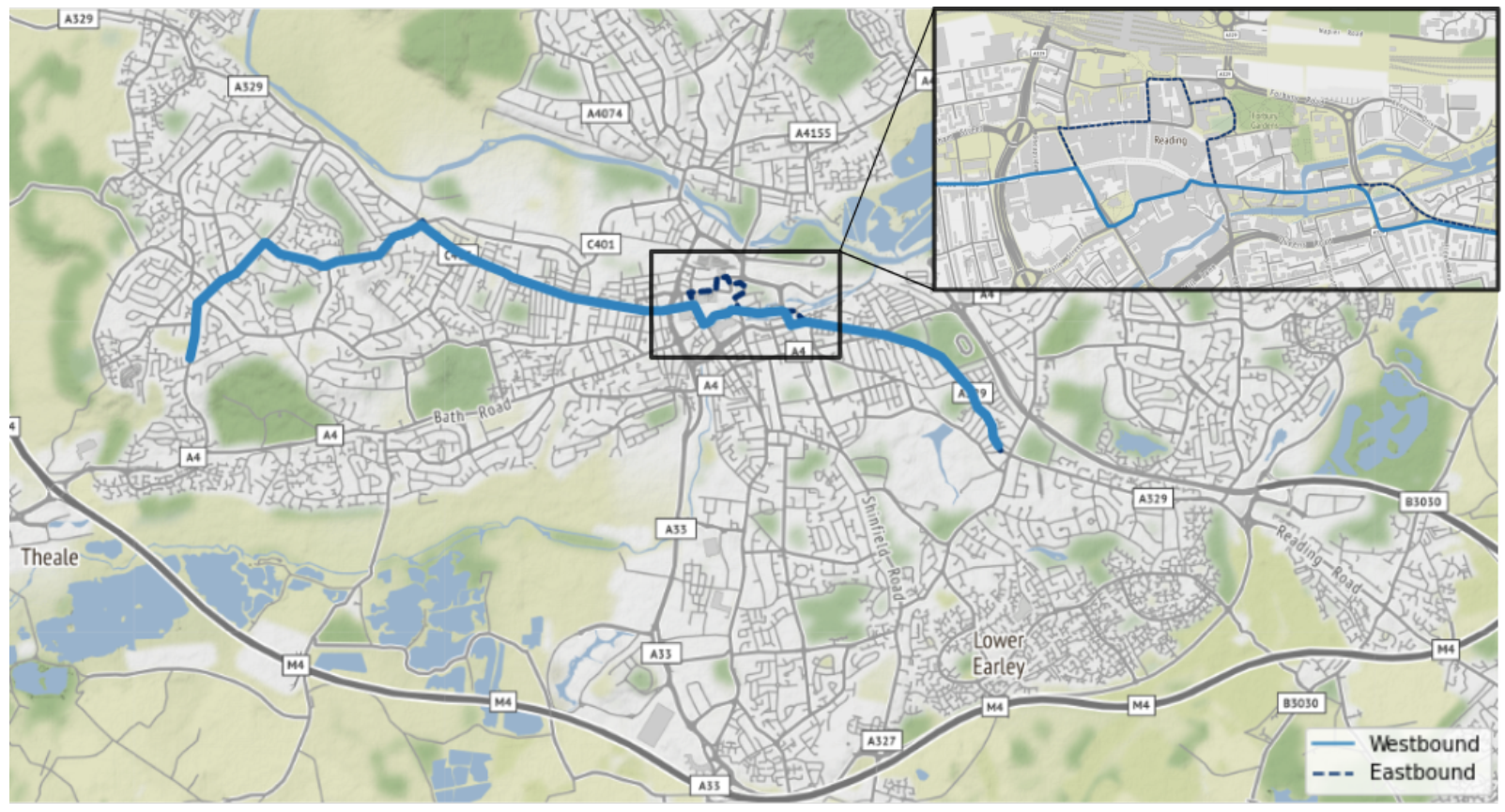
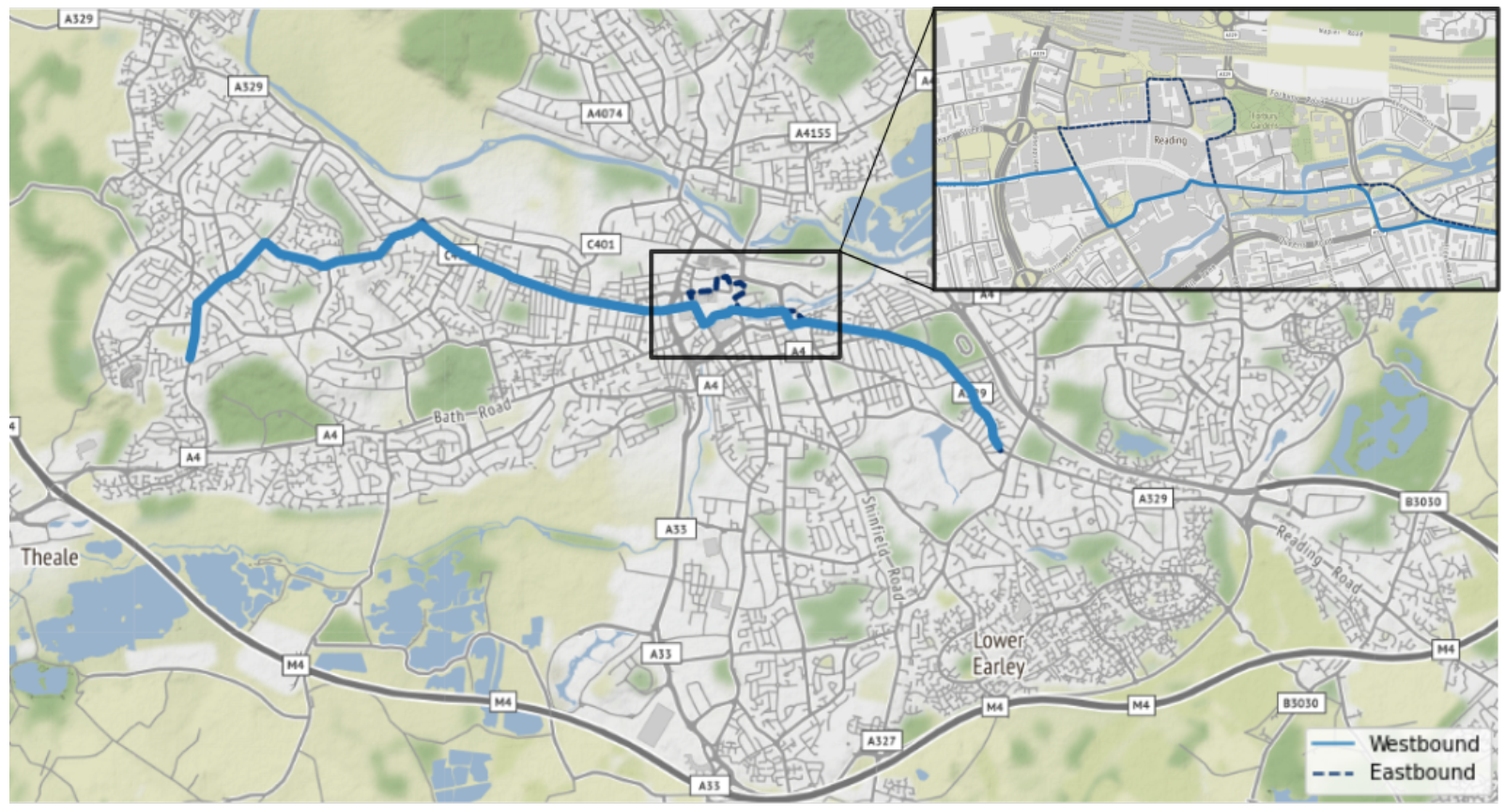
Data were accessed through the infrastructure of our collaborators. For this study, the city Reading (UK) was selected due to the largest amount of available data (
Figure 1). As a line of interest, bus line 17 was chosen as it runs with the highest frequency and thus generates the most data. For this line, the predictions were made based on all vehicles which interact with this particular line, see
Section 2.2.1. Automatic Vehicle Location (AVL) data were collected for all vehicles within the Reading bus network. Each vehicle sends its position approximately every 40 s, and the company providing the integrated AVL system passes the data on to several third-party entities before it is recorded. Due to the handling of data by several independent companies, only limited amounts of information are transmitted and retained. The available data are as follows.
Based on this limited information, it is not possible to match the vehicles with the timetables for the current journey. A journey is a specific trip found in the bus line timetables, such as the 9 AM eastbound service. An additional challenge is matching a vehicle to a specific route pattern. These patterns are slightly different routes that a vehicle on the same line might take. On the basis of the available data, a vehicle cannot be matched to such a pattern. Therefore, a route pattern for each city was arbitrarily selected and used to calculate route trajectories, which is an acceptable approach, as in the selected cities the differences between patterns are negligible.
2.2. Data Processing
We have previously described a heuristic method to identify individual journeys, which was applied to the collected data [
37]. In summary, it involves the identification of an individual journey based on the change in direction of a vehicle. Then a journey is represented as a trajectory, which is the distance travelled along a route. Finally, the repetitions at the start where the vehicle did not move further than 10 m were removed, and the journey is assumed to start once the vehicle has started moving and ends once the vehicle has reached its destination.
The final dataset included for the westbound direction 113,358 training samples and 24,214 holdout samples and for the eastbound 107,831 and 22,953.
2.2.1. Vehicle Interactions
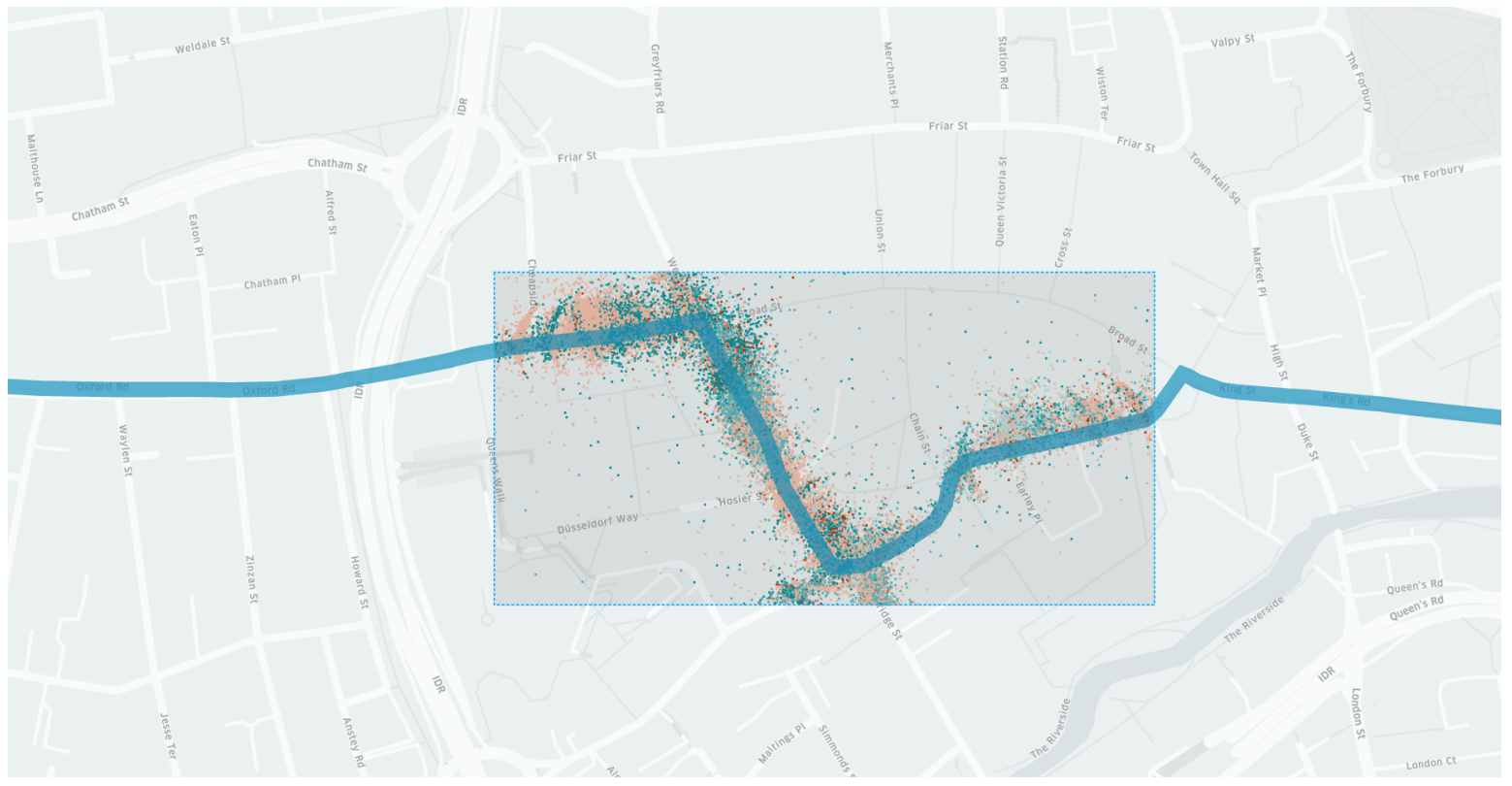
As our hypothesis assumes that additional information can be gained from vehicles which interact with buses on line 17, such interactions should be defined. A road section was selected in the city centre of Reading which poses a bottleneck that most vehicles have to pass. Vehicles passing through the same section as vehicles on line 17 (east or west) were assumed to constitute an interacting line.
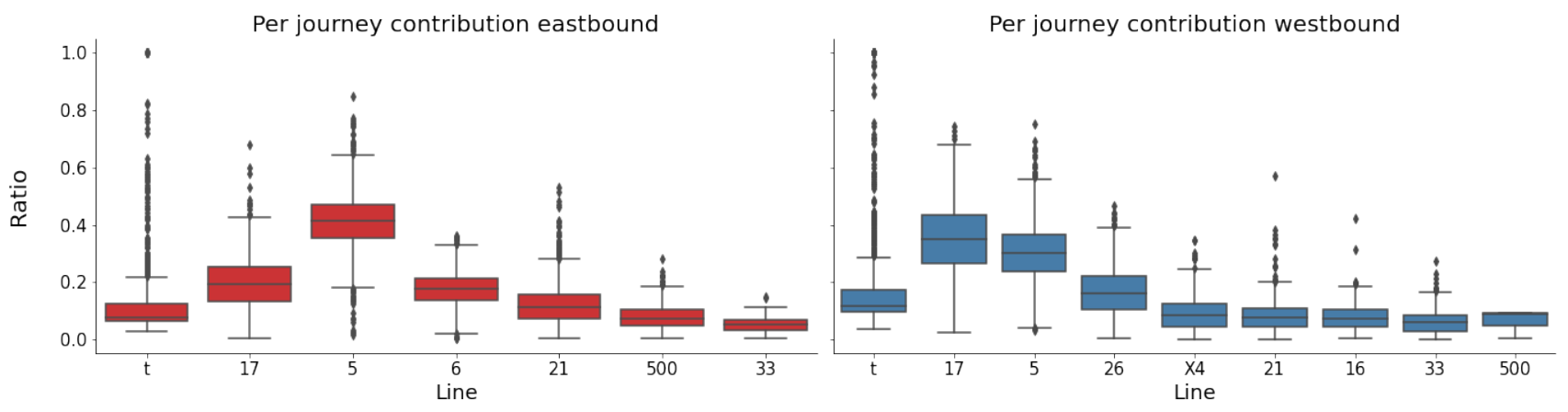
The lines that will be included to test the effect of interactions are identified using an area of interest in the city centre by Reading (
Figure 2). A randomly selected subset of 100 k data points are then used to identify lines that travel through this area at any point in time in the same direction as the line of interest. This means that when predicting, for example, line 17 eastbound, not all other lines necessarily are assigned the direction “eastbound” as some might have different starting points, meaning the direction does not match the line of interest.
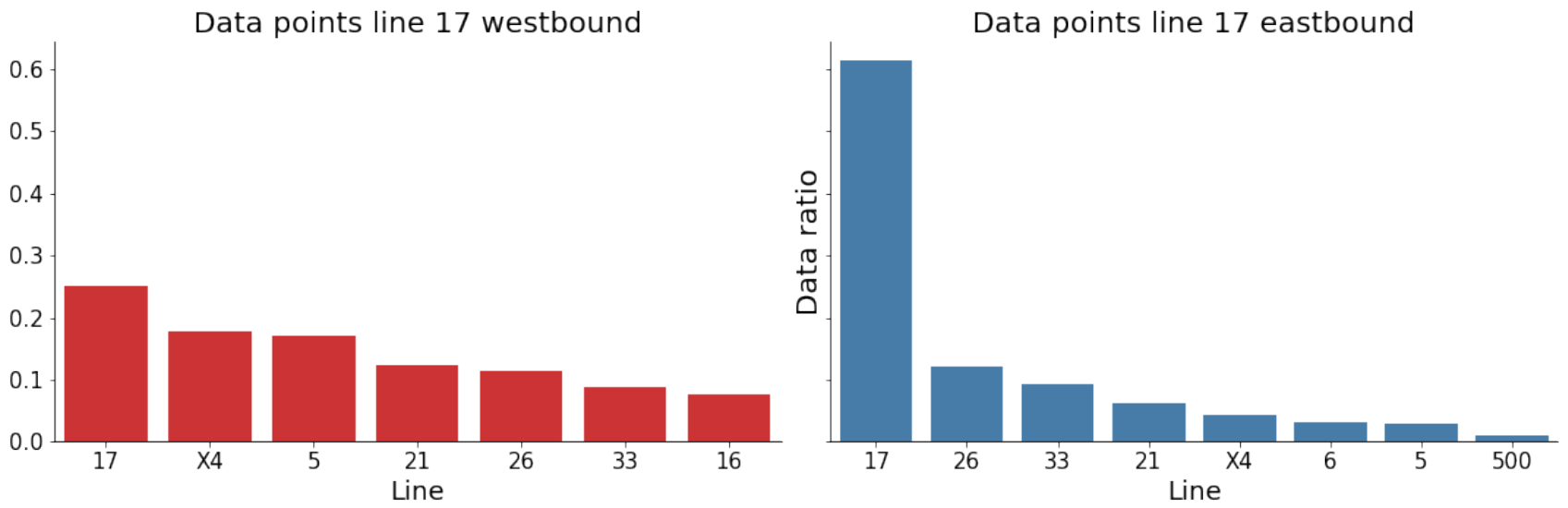
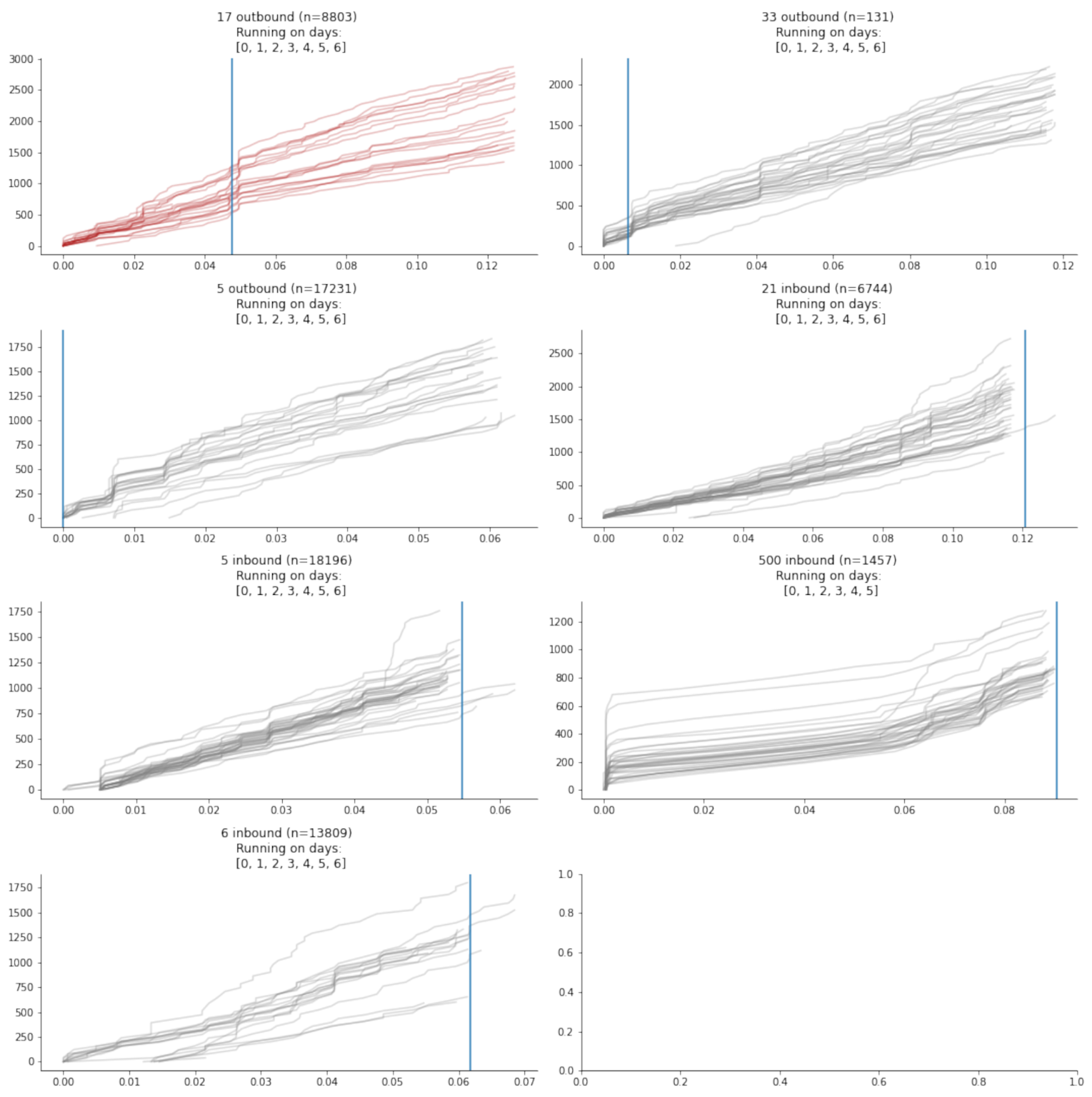
This results in 70 possible lines, of which many only contribute a minuscule fraction. The final selection is made by choosing those lines that contribute more than 3% of the total number of data points in the area of interest
Figure 3 and
Figure 4.
2.2.2. Input Features
The features included were: coordinates normalised to a bounding box, the bearing reported by the AVL system, the time delta between consecutive recordings, the elapsed time from the start of the journey and time embeddings as described below. The input features were min-max normalised unless stated otherwise.
2.2.3. Time Embeddings
The time information was split into its components to allow algorithms to learn seasonal patterns. To achieve this, the timestamp was translated into minutes of the day, hour of the day, and day of the week. These were embedded in a multidimensional space as detailed in the architecture description.
2.2.4. Target Encoding
Two targets were simultaneously predicted with the reasoning that this might give gradients with richer information and thus could benefit convergence (
Section 3.3.6 for details of how the loss was calculated). The first target was an ETA to the final known position. It has to be kept in mind that this could also be a point along the route where a short journey ends and does not necessarily have to be the final stop on the trajectory. This is expressed as minutes from the last data transmission. The second target is the next position along the trajectory, which is equivalent to a fraction along the route and can be decoded to give exact GPS coordinates. As noted previously, reducing the prediction space improves the final prediction. Therefore, the target was expressed as the distance along the trajectory from the last known position, which can be simply added to the previous distance to give a location along the trajectory. This enforces a forward prediction and is more useful, as a vehicle should never change direction in the middle of a journey. The combination of the two targets is an example which is more applicable, as network operators will in most cases be interested in ETA predictions and more accurate vehicle locations.
3. Methods—Model Architecture
Several models and techniques are combined to form a single workflow that accounts for the current state of the entire city network. In the following sections, each individual part is described, followed by a workflow that combines all models into one predictor.
3.1. Line Based Models
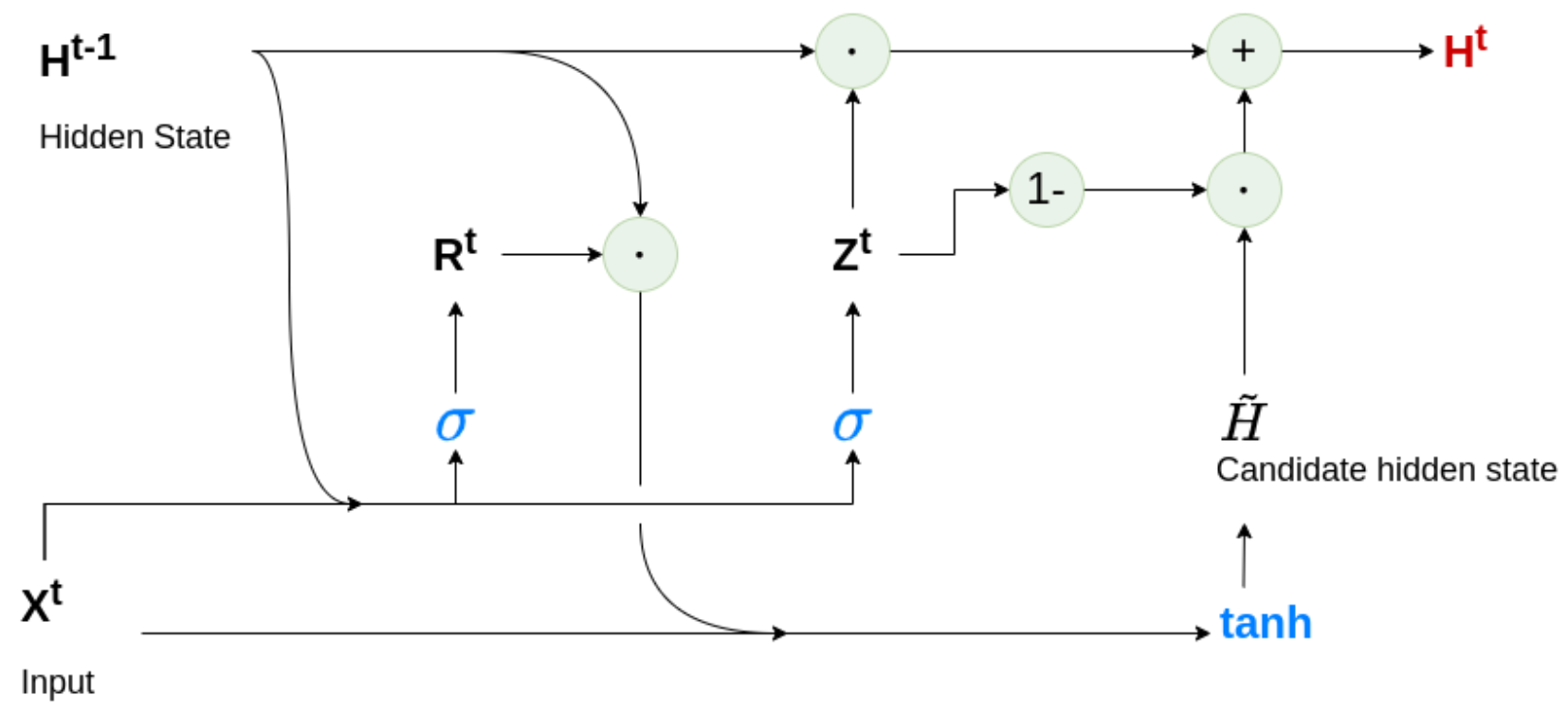
Each included line is assigned a model for both the westbound and eastbound directions. These models are simple Gate Recurrent Units (GRU),
Figure 5. Additionally, a separate model was included for the target vehicle, which means that a specific GRU was used for vehicles of line 17, depending on whether they were the target or an interacting vehicle. The time embeddings were learned by the model in a multidimensional space. The dimension is half the possible value of each embedded variable. These 46-dimensional embeddings were fed into a linear layer and reduced to their original dimensions. The output of the linear layer was concatenated with the remaining input features and fed into the GRU. The dimensionality of the output as well as the number of layers was empirically derived based on the training results of a small subset of data (1000 samples). This was necessary due to the very slow training of the model, which will be discussed in
Section 3.3.4.
3.2. Attention Mechanism
The outputs of the encoding line-based models are handed over to the decoder, using a user-defined number
n of outputs
yt-n from the last
n historic network states. These historical network states are used as encoding
e to be used by the attention mechanism
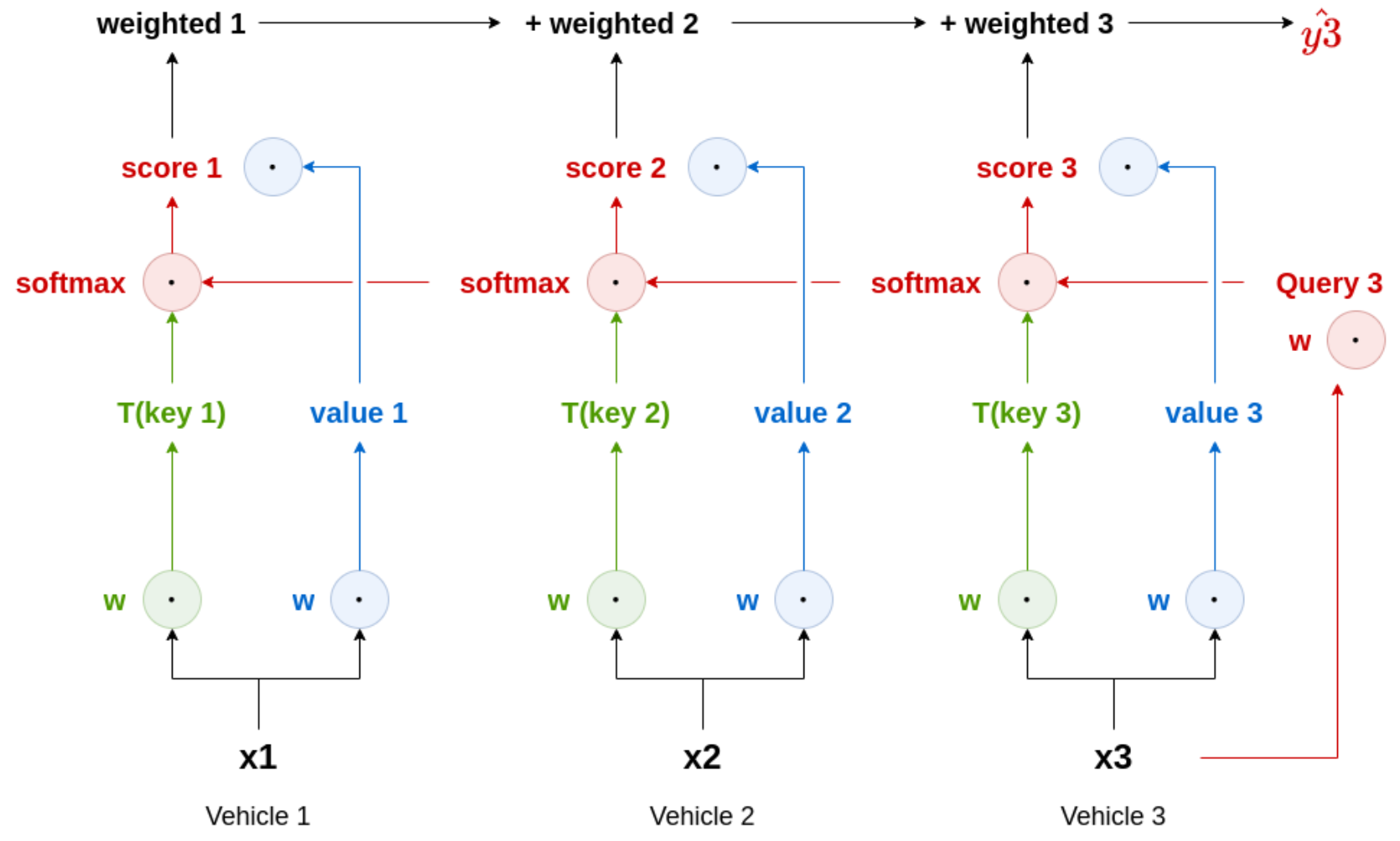
Figure 6. The first step of the attention mechanism is to derive
Queries (Q),
Keys (K), and
Values (V). To obtain these values, a matrix product is calculated between
e and the previously randomly initialised corresponding weights as shown below:
where:
e = embedding of user-defined n network states.
= randomly initialised weights for Q, K and V respectively.
The decoder employs a scaled dot product attention as described by [
34]. The authors used the following scaling method:
where:
= dimension of queries and keys.
Q, K, V = Queries, Keys and Values respectively.
The authors of [
34] hypothesised that the reasons this scaling is necessary are issues caused by vanishing gradients of the softmax layer if the input data of the encoder had high dimensions. We found in our experiments that scaling did worsen the overall performance of the prediction model, and therefore the scaling was abandoned, and a simple dot product attention was modified by upscaling the attention by a constant of 1.5 which was empirically chosen by testing the performance of small subsets of data.
where:
Q, K, V, c = Queries, Keys, Values and upscaling constant (1.5) respectively.
The output of this attention decoder was fed through a fully connected layer followed by a sigmoid layer to give the final prediction.
3.3. The Training Procedure
The training of this model ensemble is challenging, as it dynamically changes depending on the state of the transport network. At the same time, the weights of a line will be shared between vehicles on the same route and therefore could be accessed several times for each sample. The training procedure is performed in several steps, which are described below in detail. Pytorch [
38] was used as the software library of choice.
3.3.1. Initialisation and Optimisation
The GRU initialisation uses a random initialisation with an optional randomness seed for reproducibility for all parameters except for biases. The biases are initialised as zero. All parameters of the attention mechanism are also initialized randomly with the option of providing a seed.
The parameter initialisation for both types of models is performed before the model is defined. This means that in the case of the line GRUs n (n = number of interacting bus lines) sets of parameters are defined. These are stored as a dictionary, which are then loaded into each of the corresponding models. The same procedure is repeated for the attention model.
The handling of these weights poses a technical challenge, as sharing weights between several instances can easily prevent a successful backpropagation. If the parameters are explicitly stored, this causes issues by overwriting the gradients through the inplace operation. This is avoided by the described procedure. As a result, it is possible to leverage Pytorch’s automatic differentiation engine autograd [
38]. In practice, this is done by iteratively adding parameters to an optimiser until all parameters of all models are included. This then allows us to backpropagate all models at the same time. Stochastic Gradient Descent [
39] was used for this purpose with a momentum of 0.9.
3.3.2. Initial Encoder Pass
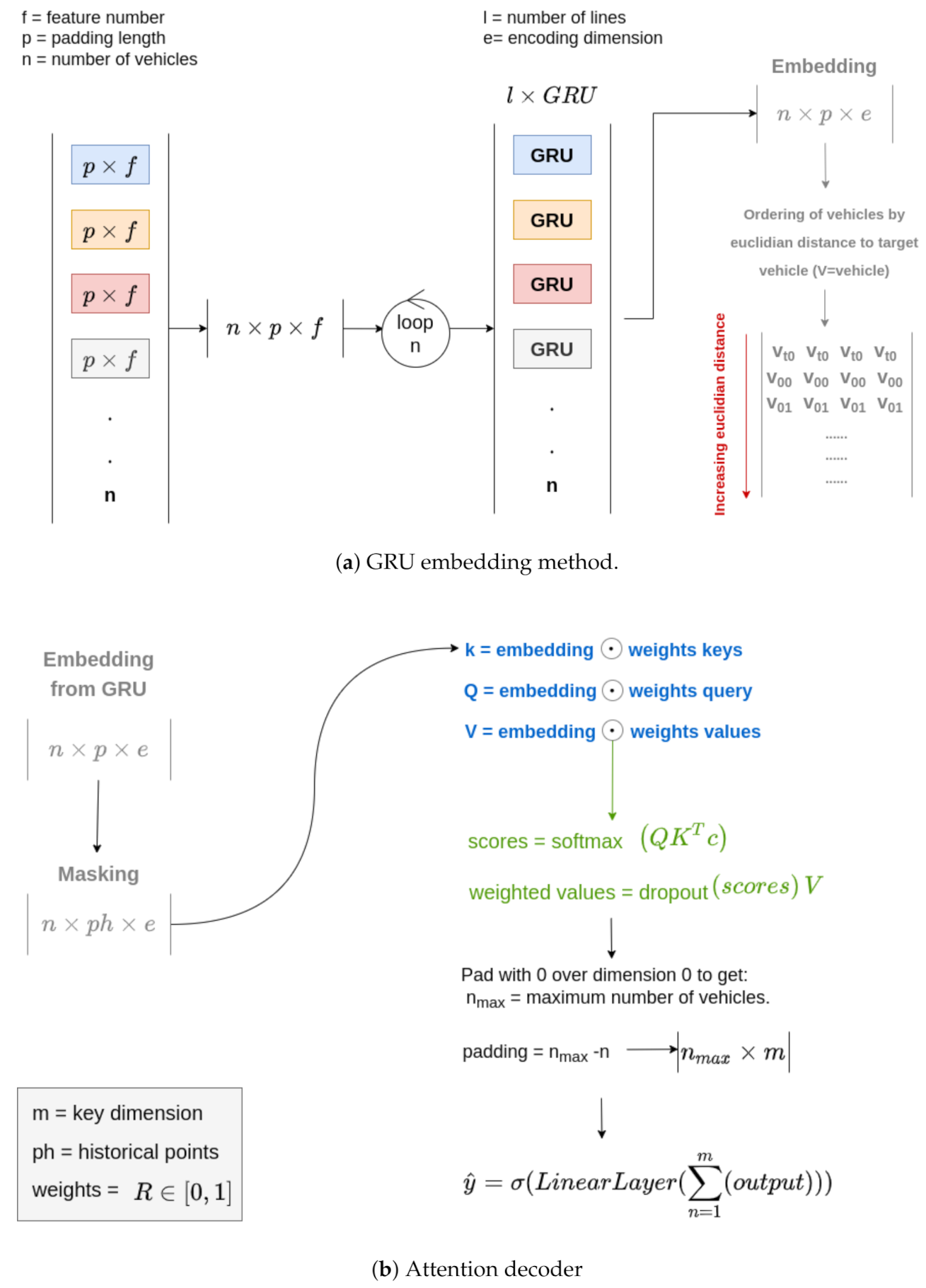
Each sample consists of the last five positions of the interacting bus lines. If fewer positions are available, zero padding is applied. Due to the dynamic nature of the data, where a varying number of vehicles with a varying number of lines make up the input data, an iterative approach for training is required. This means that for each vehicle, the corresponding line model is selected from a dictionary acting as a model library (
Figure 7a). This means that if the vehicle is assigned line 3, the line-model number 3 is selected and the vehicle data are passed to this model. The output is temporarily stored for later use in the attention model described in
Section 3.3.3. This process is then repeated until all vehicles have been included in the initial training step. The number of vehicles will vary depending on the time of the day and week.
3.3.3. Pass through Attention Decoder
The temporarily stored encoded outputs of the line models are then passed to the attention decoder. The number of historical outputs from positions further in the past can be adjusted to maximise performance. There is no fast rule, and an iterative approach has to be used. The order used was based on the Euclidian distance of the normalised coordinates of all vehicles, where each individual bus is ranked by the distance to the target vehicle. As the interest lies in focusing attention on individual vehicles rather than on the progress of the journey itself, the output is zero-padded to the maximum number of vehicles seen in the dataset (in this example, 24). Although the attention mechanism should be able to account for the order of vehicles, it became apparent through experimental tests that an increase in performance of approximately 30% could be achieved by ordering vehicles. This is necessary to keep the dimension of the weighted values constant to allow them to be fed into the final fully connected layer of the attention mechanism, see
Figure 7a,b. This model will return two decimal predictions corresponding to the trajectory of the line of interest (line 17) describing the progress along the route and the time to the final stop. This prediction is stored to be used for the loss calculation at a later point (
Section 3.3.4).
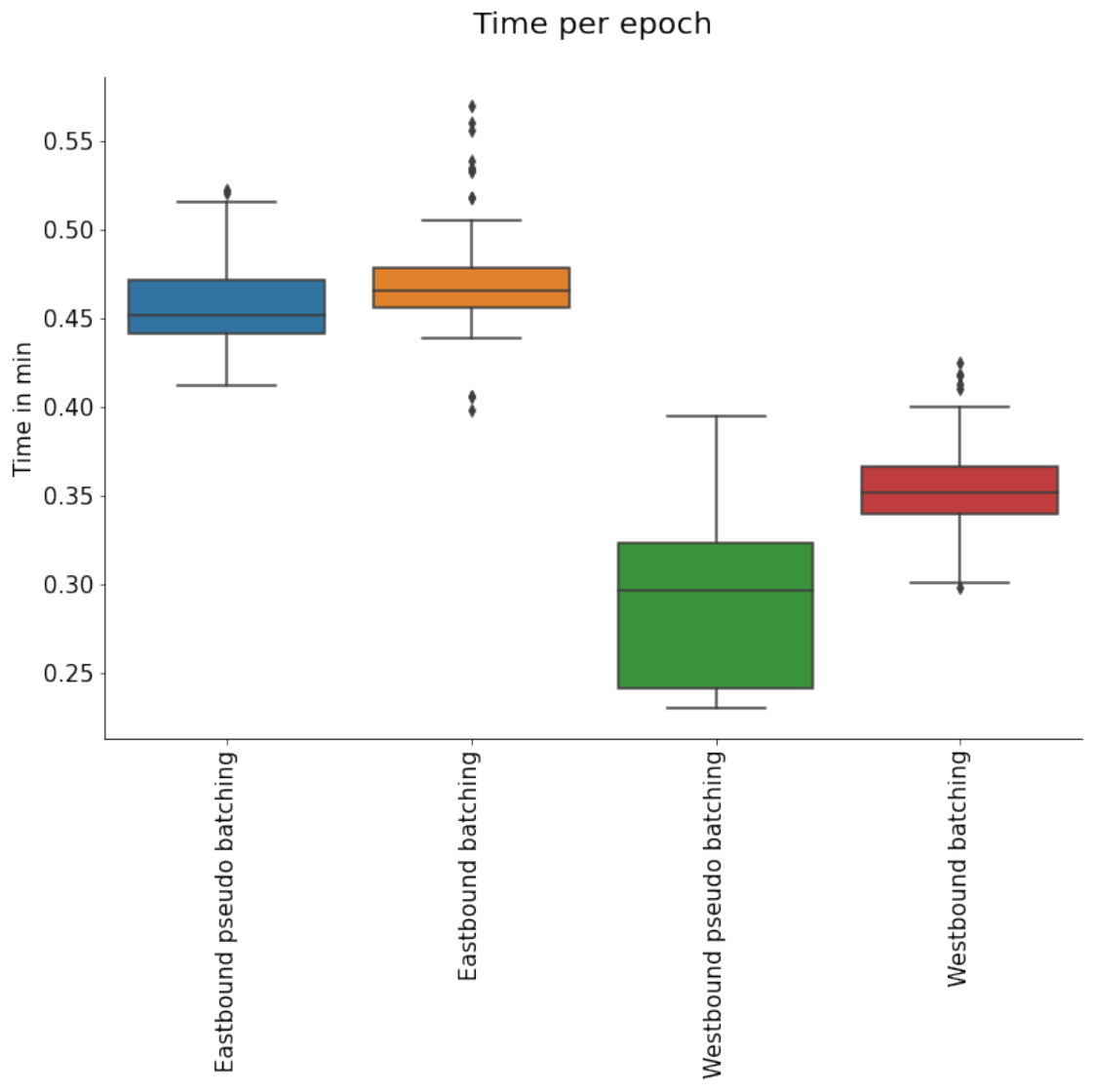
3.3.4. Pseudo-Batching
Due to the complexity of the described training procedure, a true batching of the data is not possible, as the number of underlying line models is dynamic and has to be individually adapted to each sample. Therefore, model training must be done iteratively for each sample. As backpropagation after each sample would cause instability of the model, an alternative was chosen where backpropagation was applied after every 500 samples. This compromise is used to avoid having to wait until the end of an epoch before backpropagation can be run, with the intuition that this should speed up the convergence of the model with fewer epochs needed for training. This method is of course not as effective as true batching, as it cannot leverage the parallel computing capability of a GPU and thus is a very slow process.
3.3.5. Batching
Although true batching is not possible because the composition of the dataset changes for each sample, a batching method was applied to the attention mechanism. To achieve this, the outputs from the line-based GRU models were collected into a batch, which was then handed over to the attention mechanism. This was hypothesised to increase processing speed and improve performance through a regularising effect [
40]. To directly compare this batching method with the pseudo-batching method described in
Section 3.3.4 equal chunk and batch sizes were used to compare training times.
3.3.6. Loss Calculation and Backpropagation
After a user-defined number of samples, which are considered a pseudo batch, the loss is calculated based on the stored predictions. Due to the initialisation of the optimiser described in
Section 3.3.1 the backpropagation can simply be calculated using a single optimiser and will be applied to all models. With the optimised model, a new pseudo-batch can be fed through the model.
As in this study, two targets are predicted, the next position along the trajectory as well as the time of arrival at the final stop, the Mean Average Error (MAE) is calculated for each metric individually, and both are summed during the training process. This allows to also monitor these individually during training to allow a better evaluation of the training progress.
3.4. Hyper Parameters
Due to the slow training of this model and the large data set, it was not possible to use an automated method such as a gridsearch or a genetic approach to fine-tune the hyperparamaters. Thus, an empirical evaluation was performed using a small subset of the data (3000 randomly selected samples). The convergence speed and final loss for this subset were assessed to make an informed decision on the choice of suitable hyperparameters.
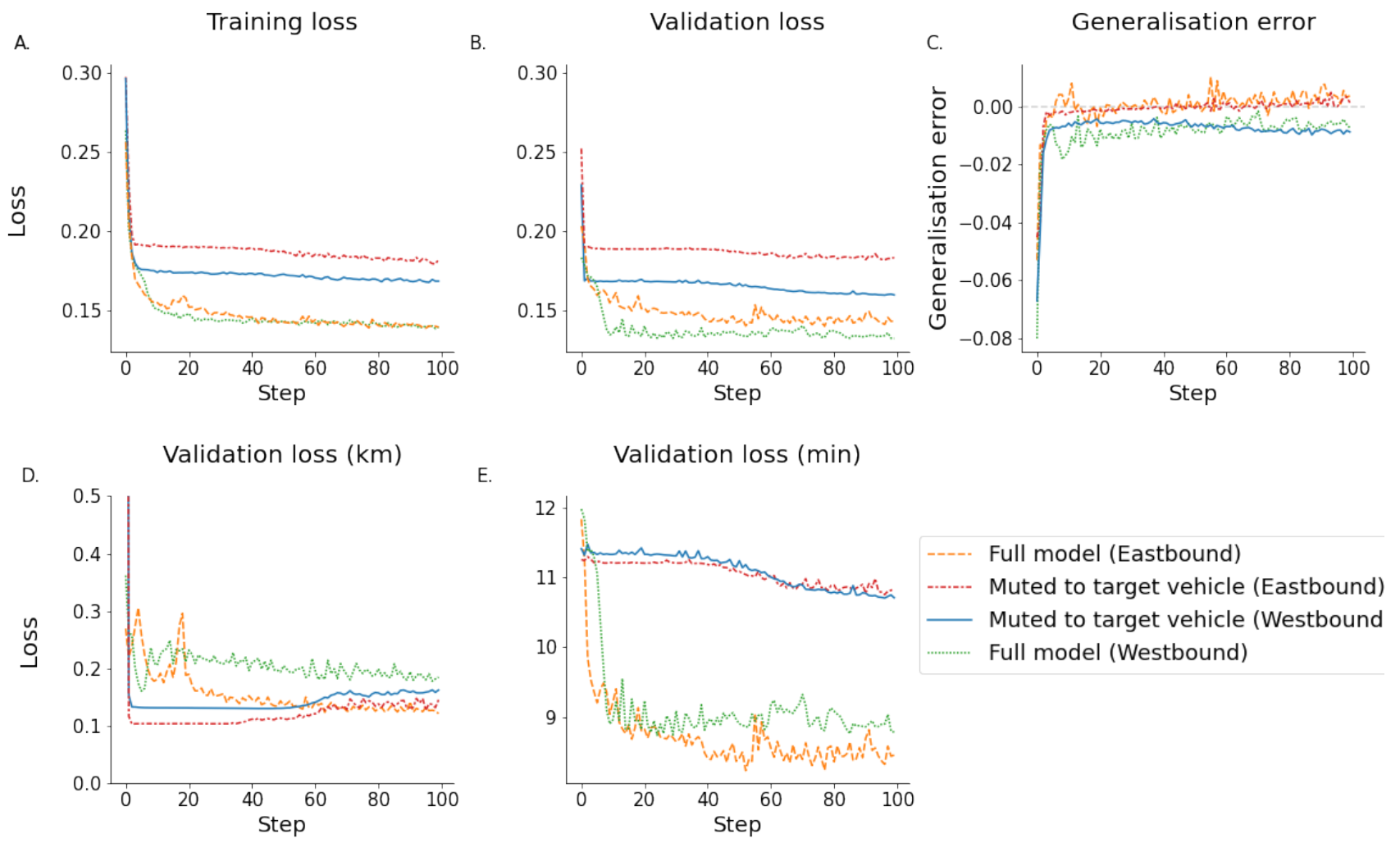
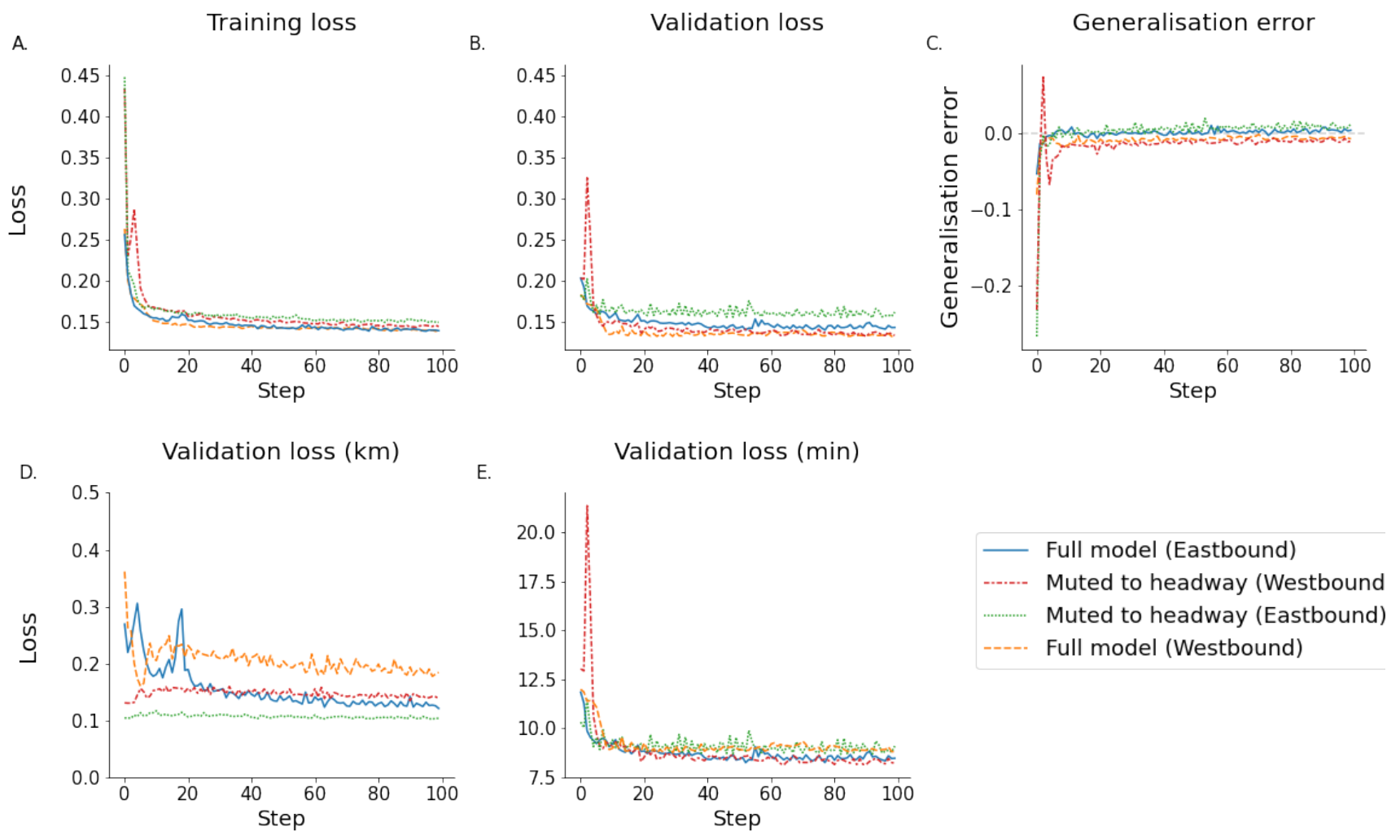
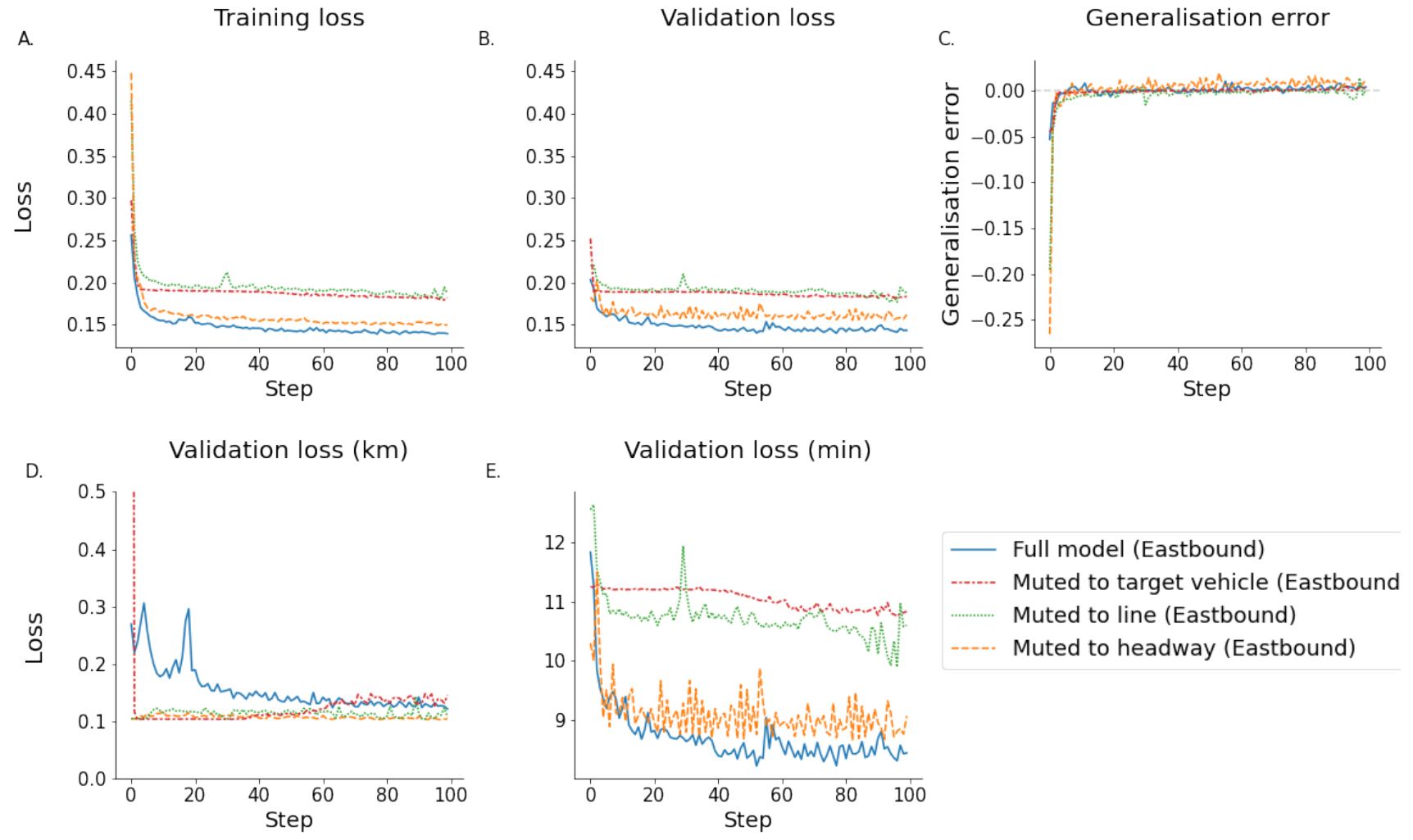
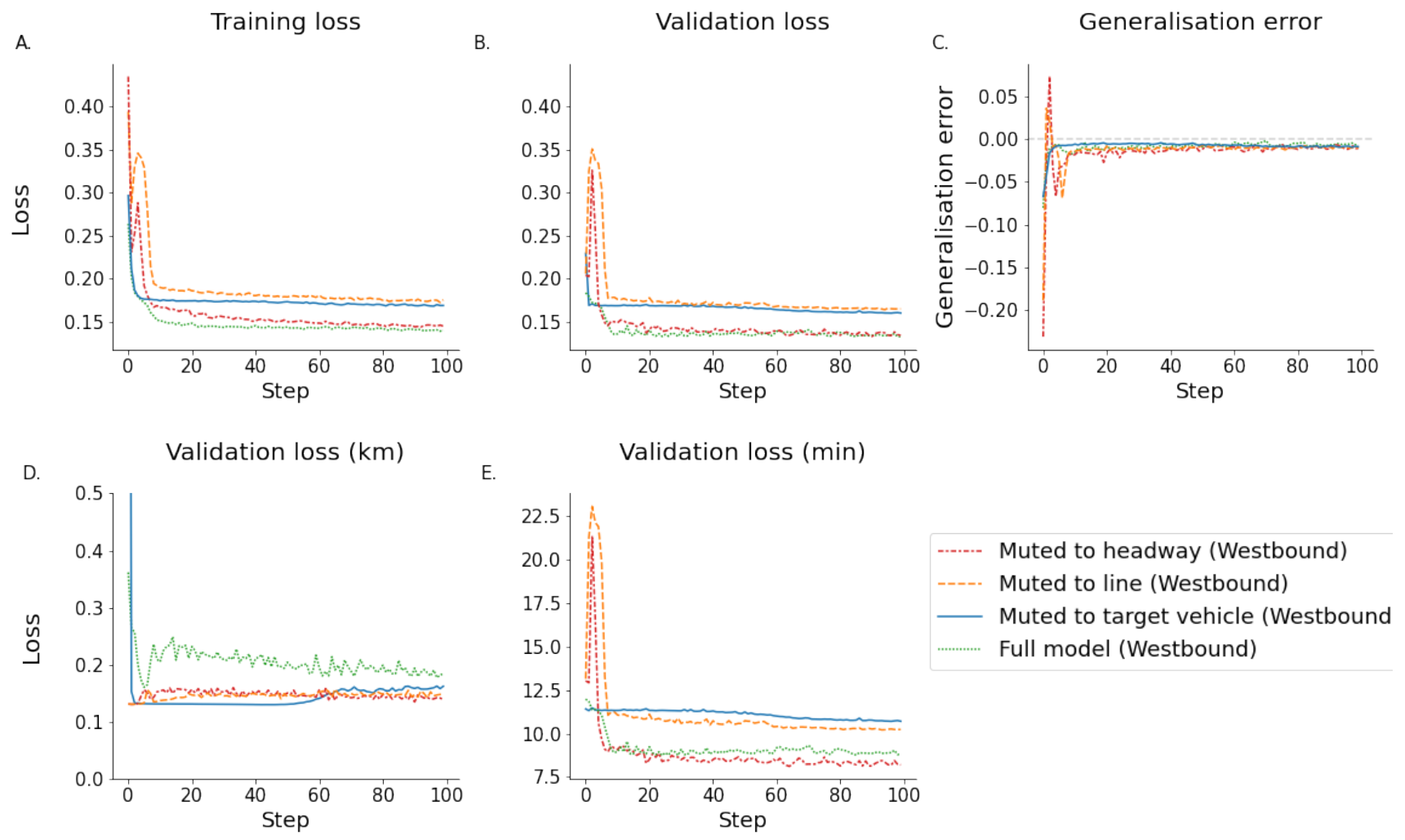
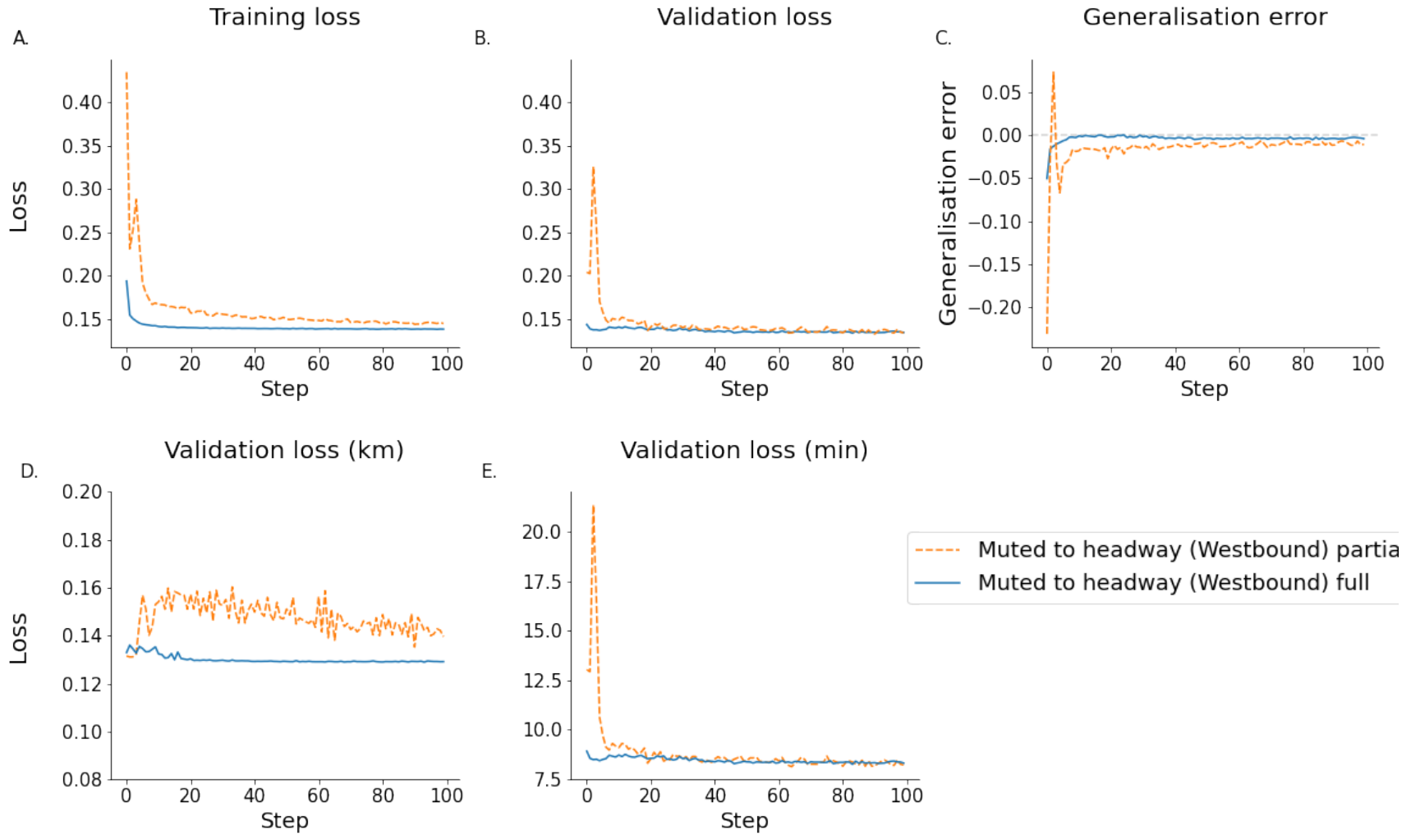
3.5. Performance Evaluation
The calculation of separate losses for both targets allows easy comparison of the loss performance as a whole but also for each target between models. Additionally, the loss distributions were monitored to assess any skewness within the training losses. For any machine learning model, both training and testing losses have to be considered to allow an objective comparison of whether a model generalises well.
3.5.1. Human Interpretable Errors
Furthermore, to make the prediction error more interpretable, the next-step prediction is translated into GPS coordinates based on the shape of the trajectory. This then allows us to calculate the Haversine distance. Note that this will calculate the direct distance and not the distance along the route. Thus, the error could be smaller than the actual distance a vehicle would have to travel along the road.
3.5.2. Generalisation Error
The ultimate goal of most machine learning algorithms is to be generalisable to new unseen data. The ability of an algorithm to generalise can be reduced by overfitting, therefore, the generalisation error was included as a performance metric. The generalisation error is calculated simply by subtracting the training error from the testing error [
41]. In a perfectly balanced model, the generalisation error should be towards 0. A negative value indicates a tendency to underfit, while a positive value indicates overfitting.
To highlight the training and testing process of the data subsets, all metrics are shown alongside each other.
5. Future Work
This study highlighted that, in some cases, a network-wide attention-based prediction method can improve ETA, as well as next-step location prediction. It also showed some drawbacks of this method, such as the complexity of implementation due to the fact that many but dynamically changing numbers of models have to be trained in parallel. This made the process computationally very inefficient and, thus, in the current state of research, not a viable alternative to conventional models. The complexity of model training prevented an efficient way of batching training samples. The single most important continuation of this work would be the implementation of a batching method, which not only speeds up training, making the development of a prediction algorithm less computationally costly, but might also improve the generalisation due to a regularising effect. If this is implemented efficiently, this should also allow the use of GPUs to further improve processing times. Another limitation of this study is the definition of what constitutes an interaction between lines. Ideally, all vehicles within the network should be included to prevent suboptimal bias in the choice of lines to be included in the model. Due to the highlighted high computational cost, this is currently not feasible. Once the aforementioned training inefficiencies are addressed, this will become possible and could boost prediction performance. Another issue related to the choice of interacting lines is the fact that most of these interact at the end of the journey of line number 17 as shown in
Figure 4. This means that the interaction between the lines is short-lived and might not have a large effect on the prediction accuracy. This could be alleviated by either choosing a different target line other than line 17 or modifying the selection criteria and definition of interacting lines. Furthermore, hyperparameter tuning was conducted empirically due to processing cost and only on a small subset of the data. Ideally, a hyperparameter search should be conducted on the entire dataset if possible, using a gridsearch or potentially a genetic approach. However, due to the extremely long processing time, this is currently prohibitive. Finally, as we have highlighted before, our dataset has serious data quality issues [
7]. As these issues are caused by infrastructure problems, these could be easily addressed if all involved companies prioritised their data collection and processing methods and made these publicly available.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}