
Infrared Image Deblurring Based on Lp-Pseudo-Norm and High-Order Overlapping Group Sparsity Regularization

Abstract
:1. Introduction
2. Materials and Methods
2.1. The Background to Deblurring Algorithms
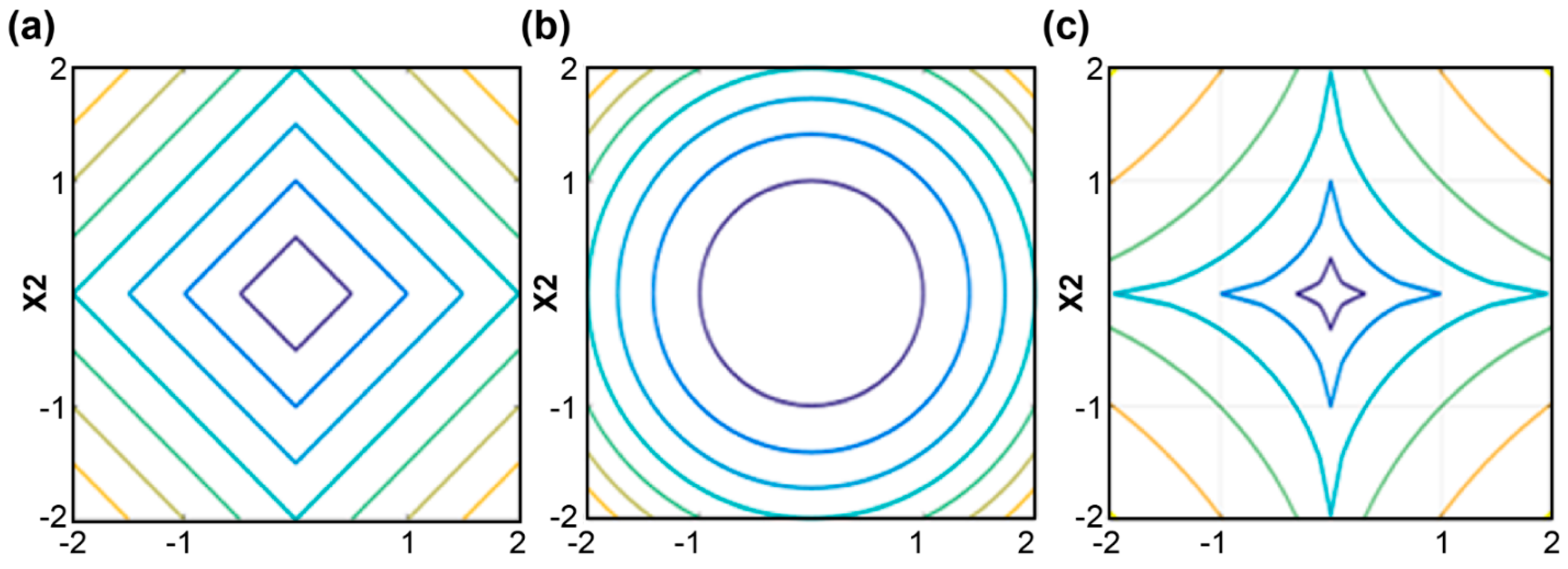
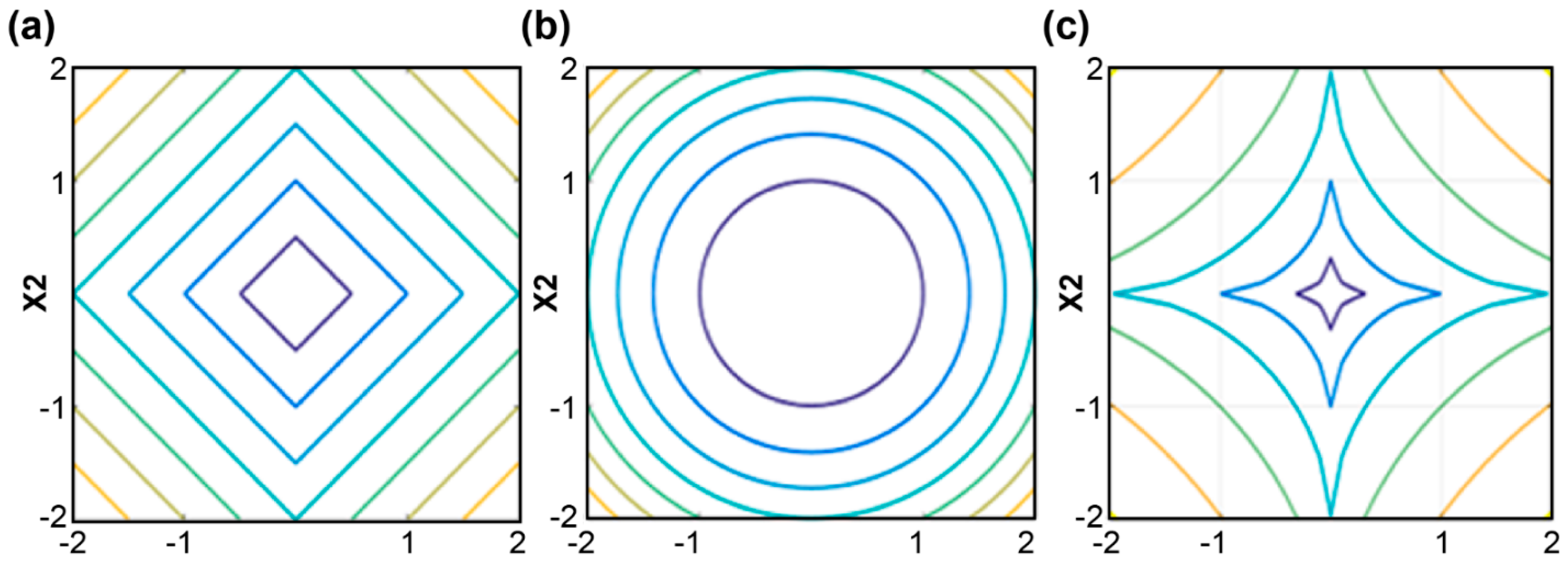
2.1.1. The Lp-Pseudo-Norm
2.1.2. The Overlapping Group Sparse TV Regularization Term
2.1.3. The Lp_LOGS Model
2.2. The Solution of the Lp_HOGS Model
| Algorithm 1. Lp_ HOGS |
| Input Observed image . |
| Output Deblurred image . |
| Initialize: |
| 1: If do |
| 2: Use Equations (15)–(17) to update ; |
| 3: Use Equation (20) to update ; |
| 4: Use Equations (22) and (24) to update ; |
| 5: Use Equation (26) to update ; |
| 6: Use Equations (28) and (29) to update ; |
| 7: ; |
| 8: ; |
| 9: End if |
| 10: Return as . |
3. Results and Discussion
3.1. The Comparison of Lp_HOGS with Lp_LOGS
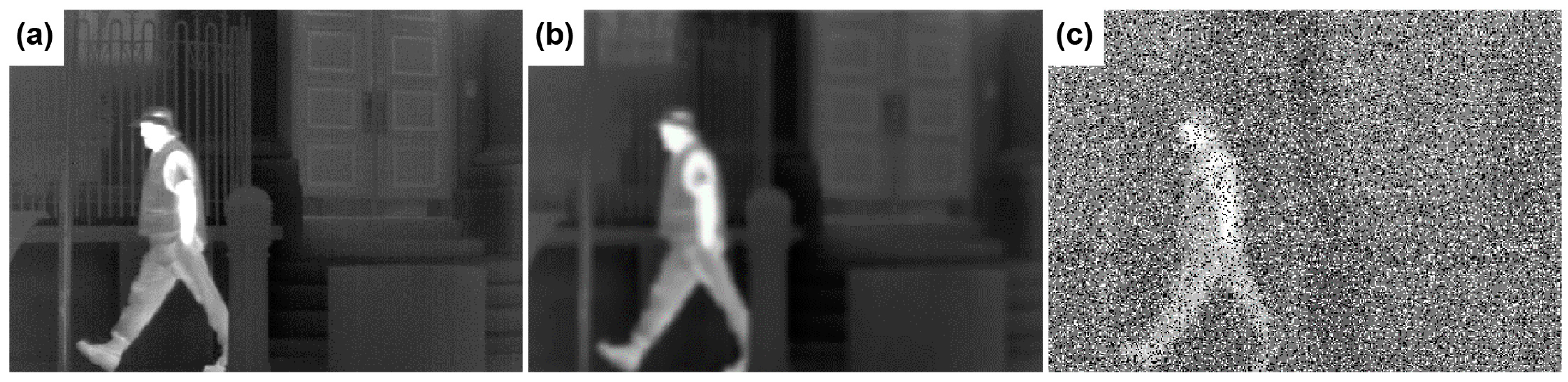
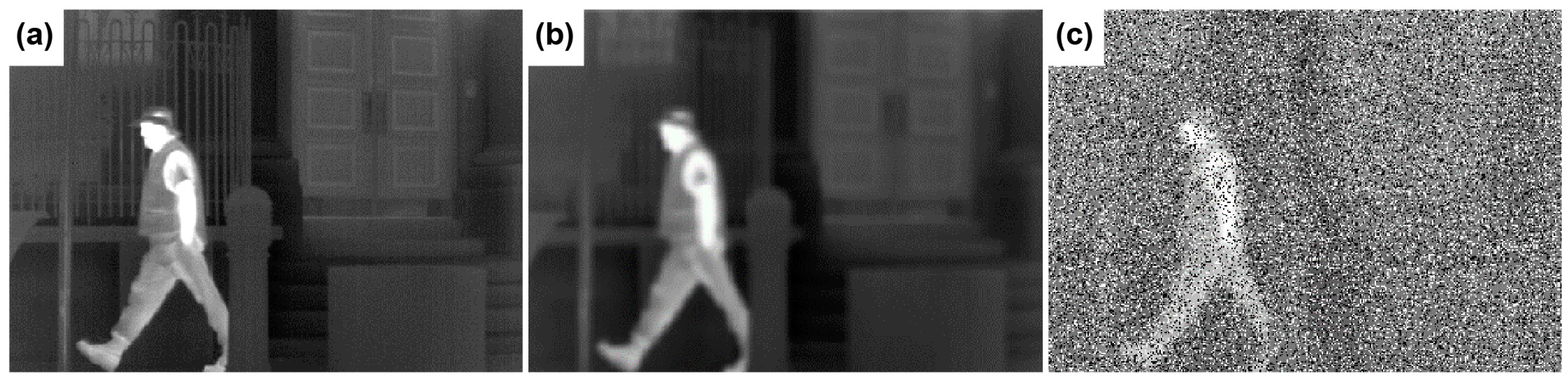
3.1.1. The Gaussian Blur
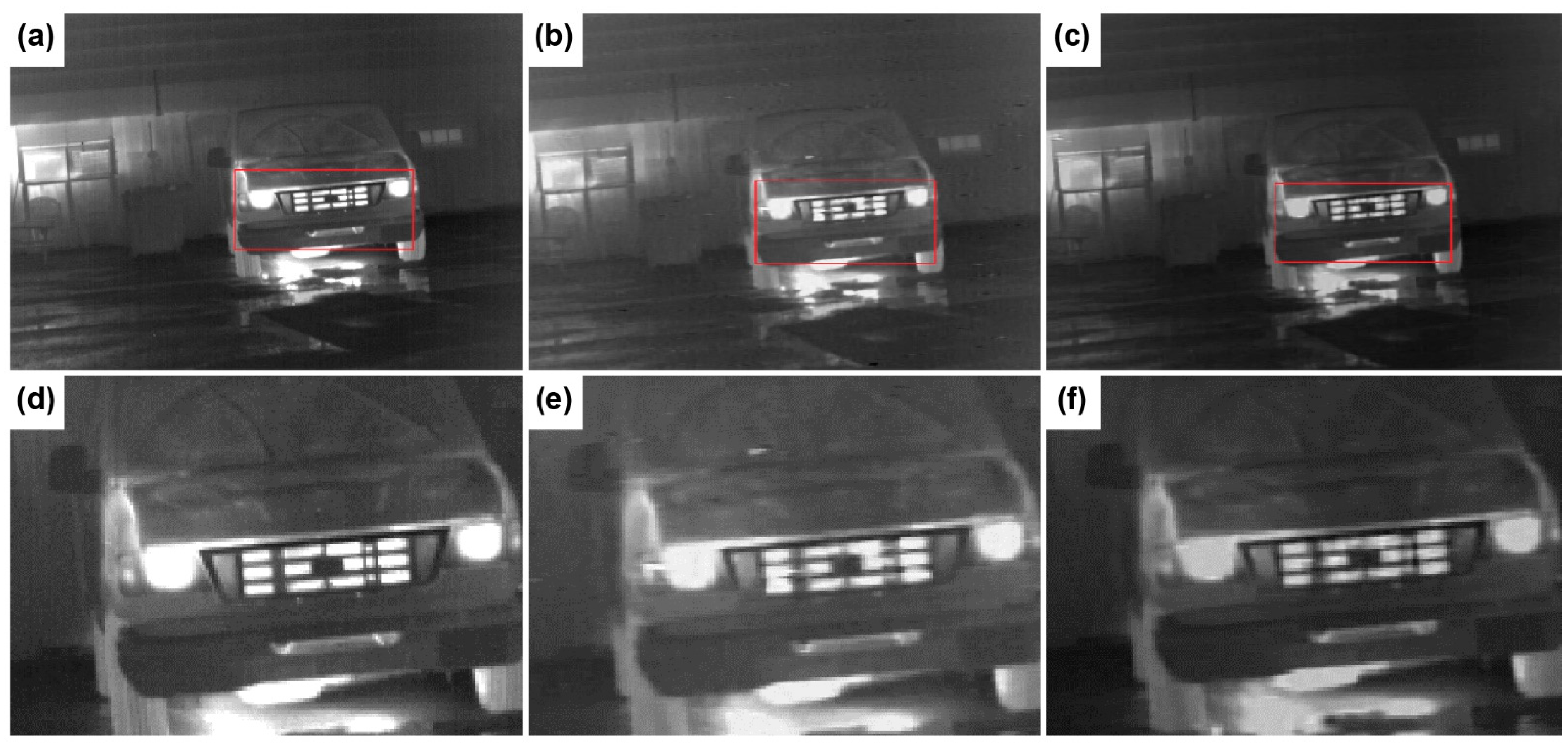
3.1.2. The Box Blur
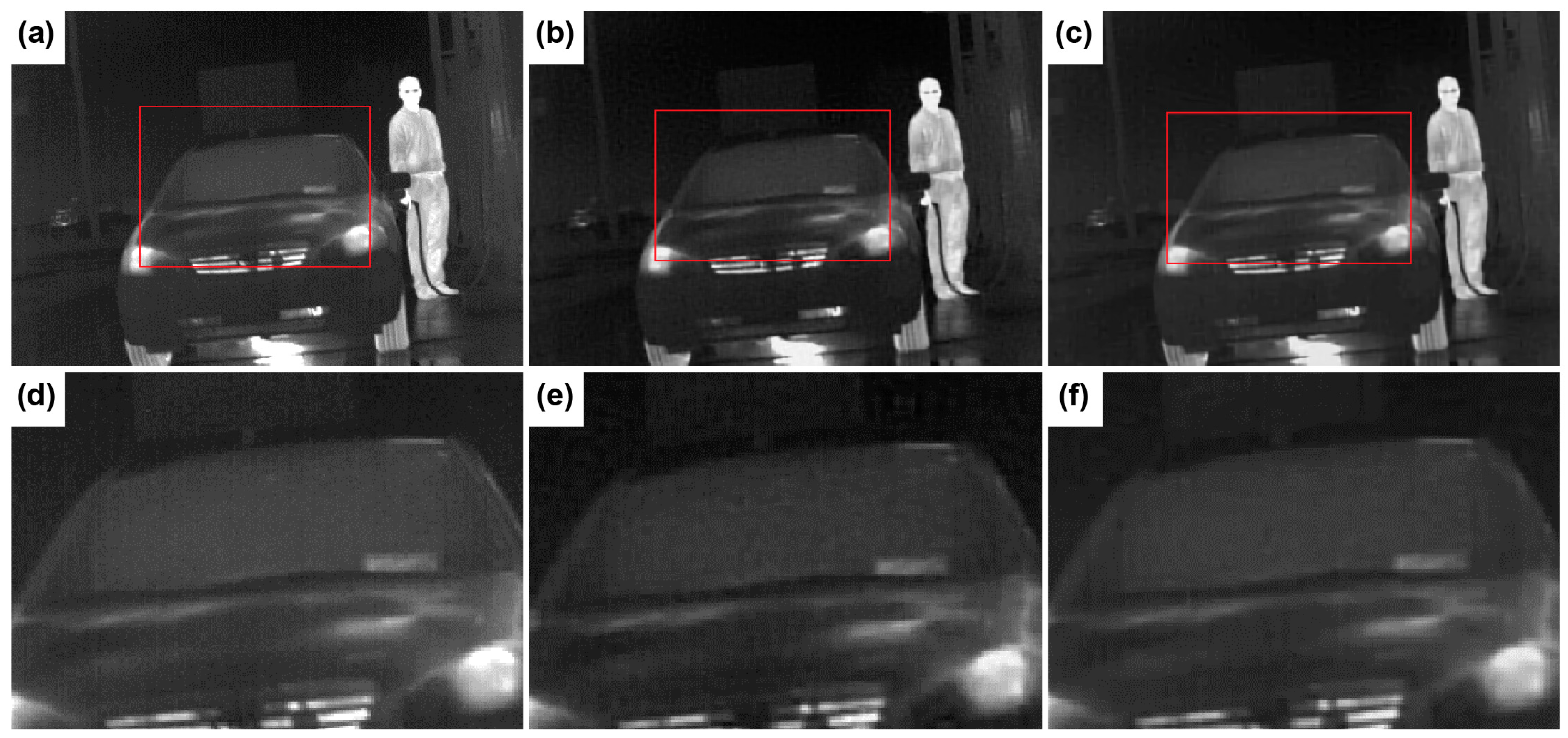
3.1.3. The Motion Blur
3.2. The Comparison with Other Methods
4. Conclusions
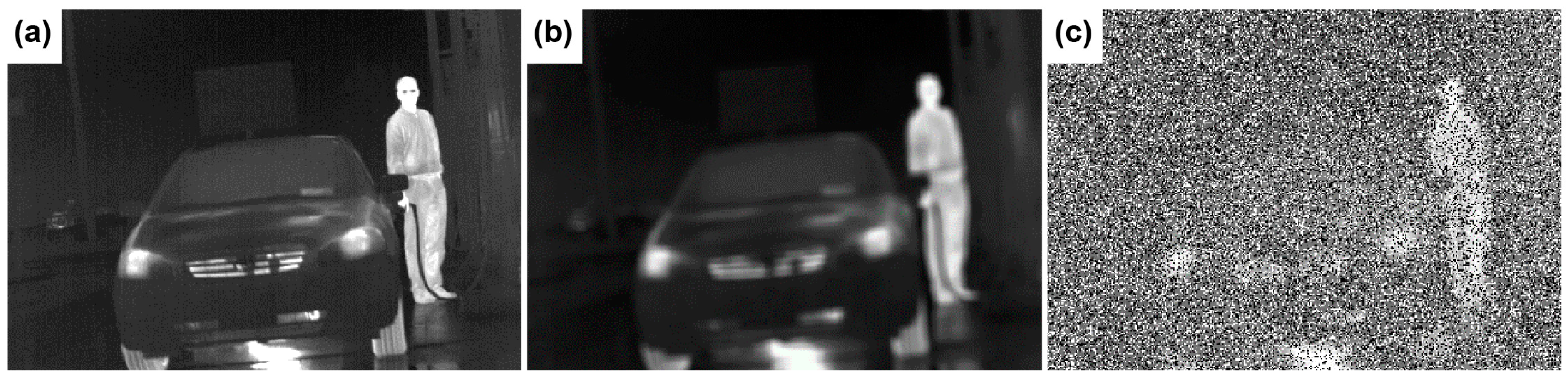
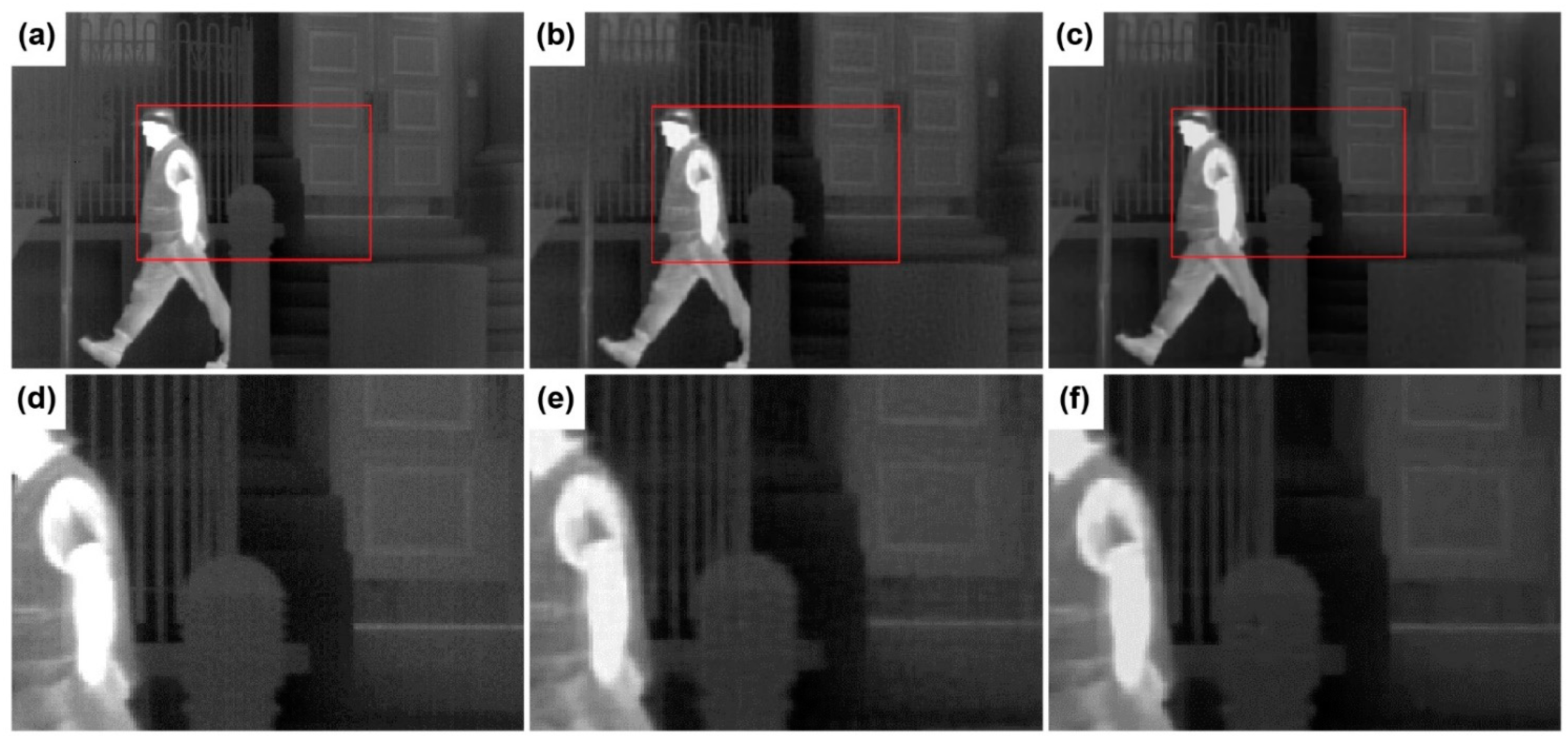
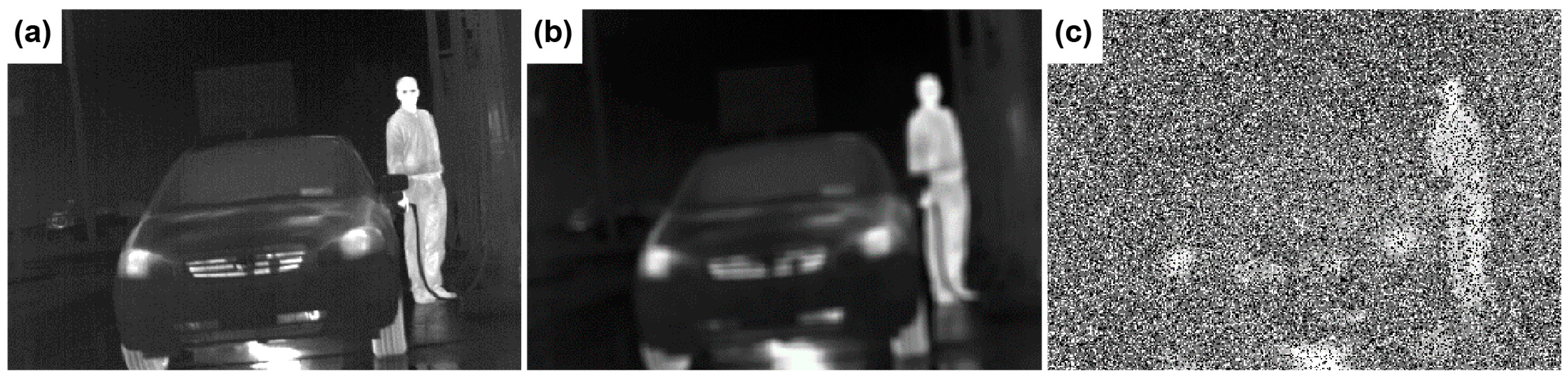
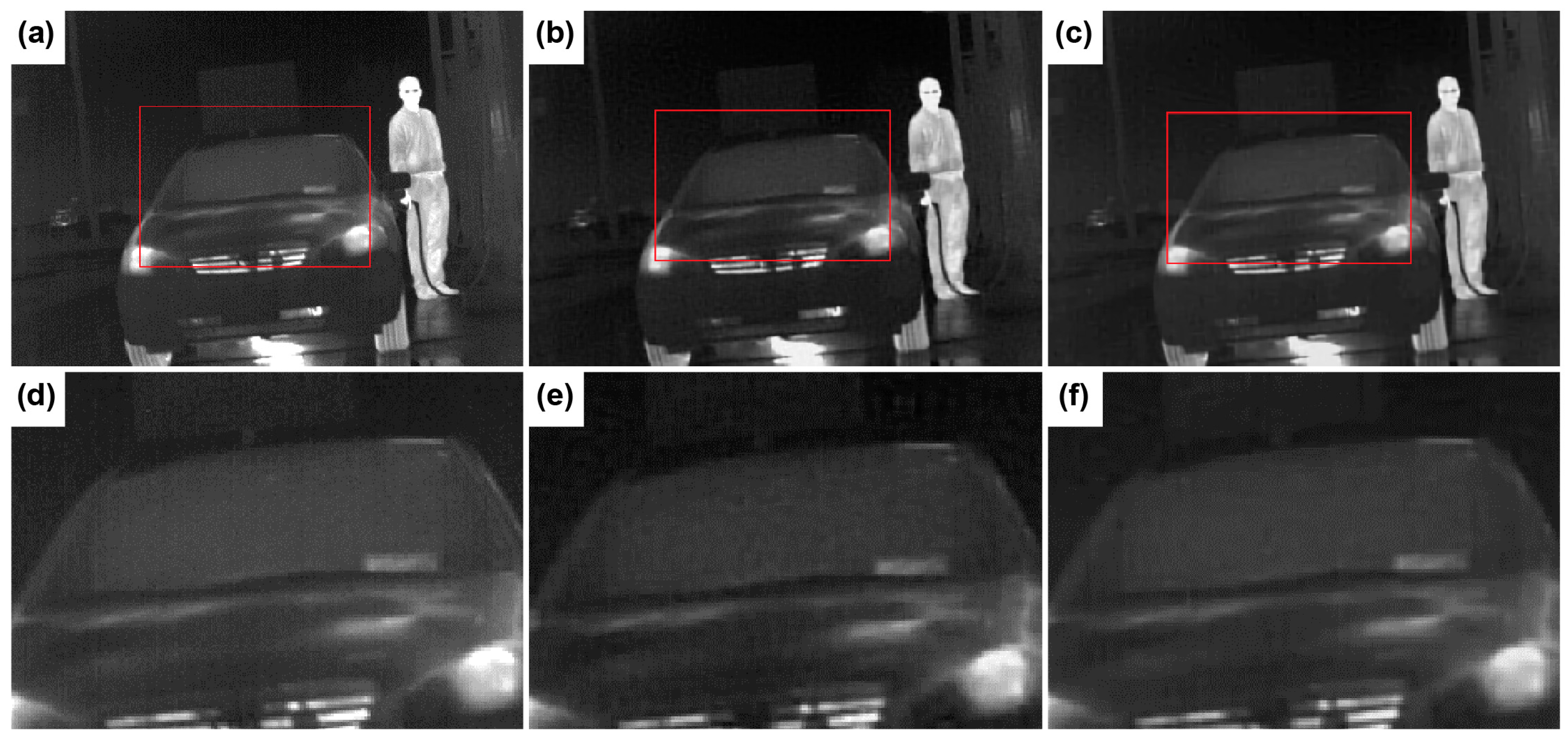
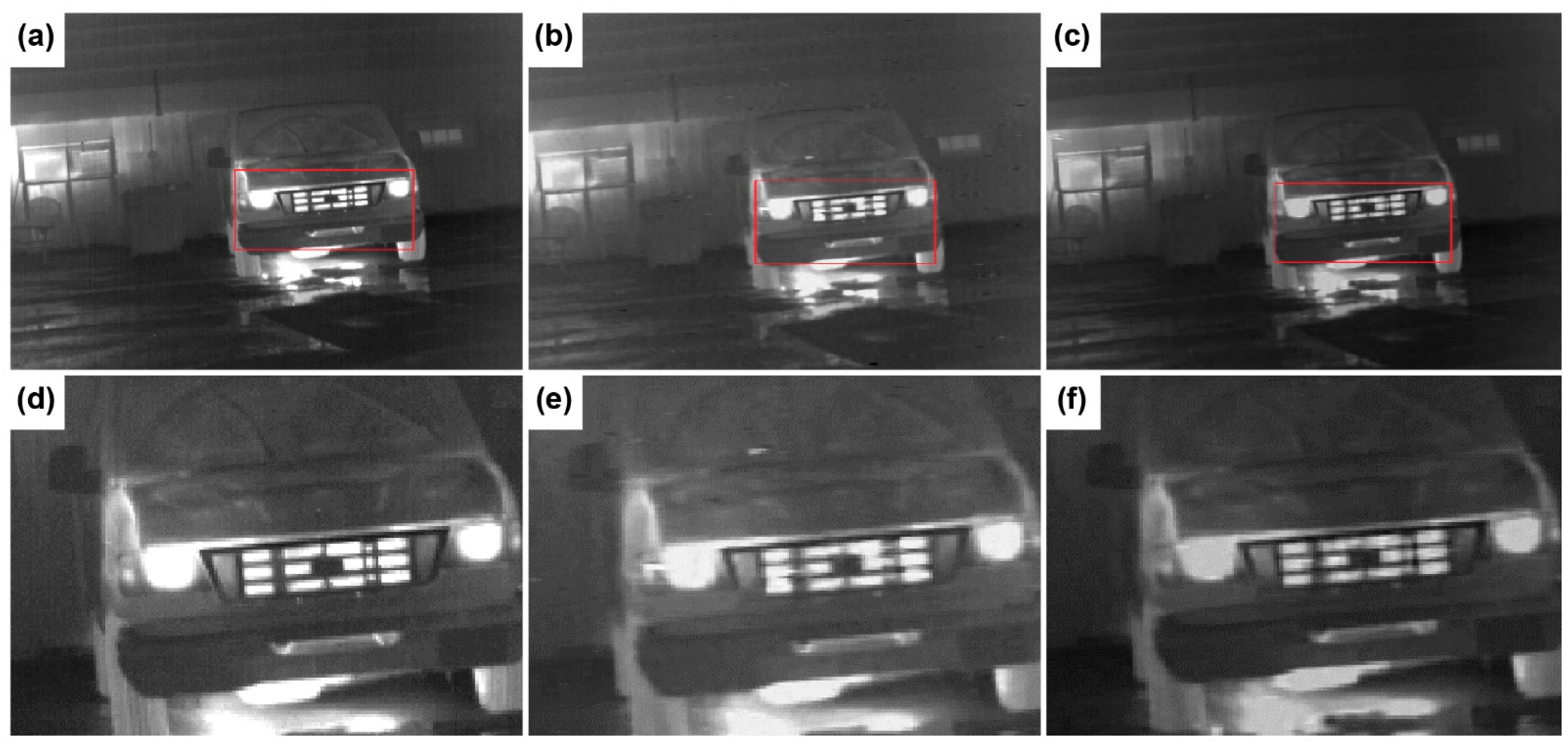
- Upon adding the Gaussian blur and different levels of salt-and-pepper noise to a given test image, the Lp_HOGS model exhibited a better deblurring effect than the existing models. This result implies that the Lp-pseudo-norm had a stronger sparse representation ability and the overlapping group sparsity regularization term increased the difference between the smooth and the edge areas of an image.
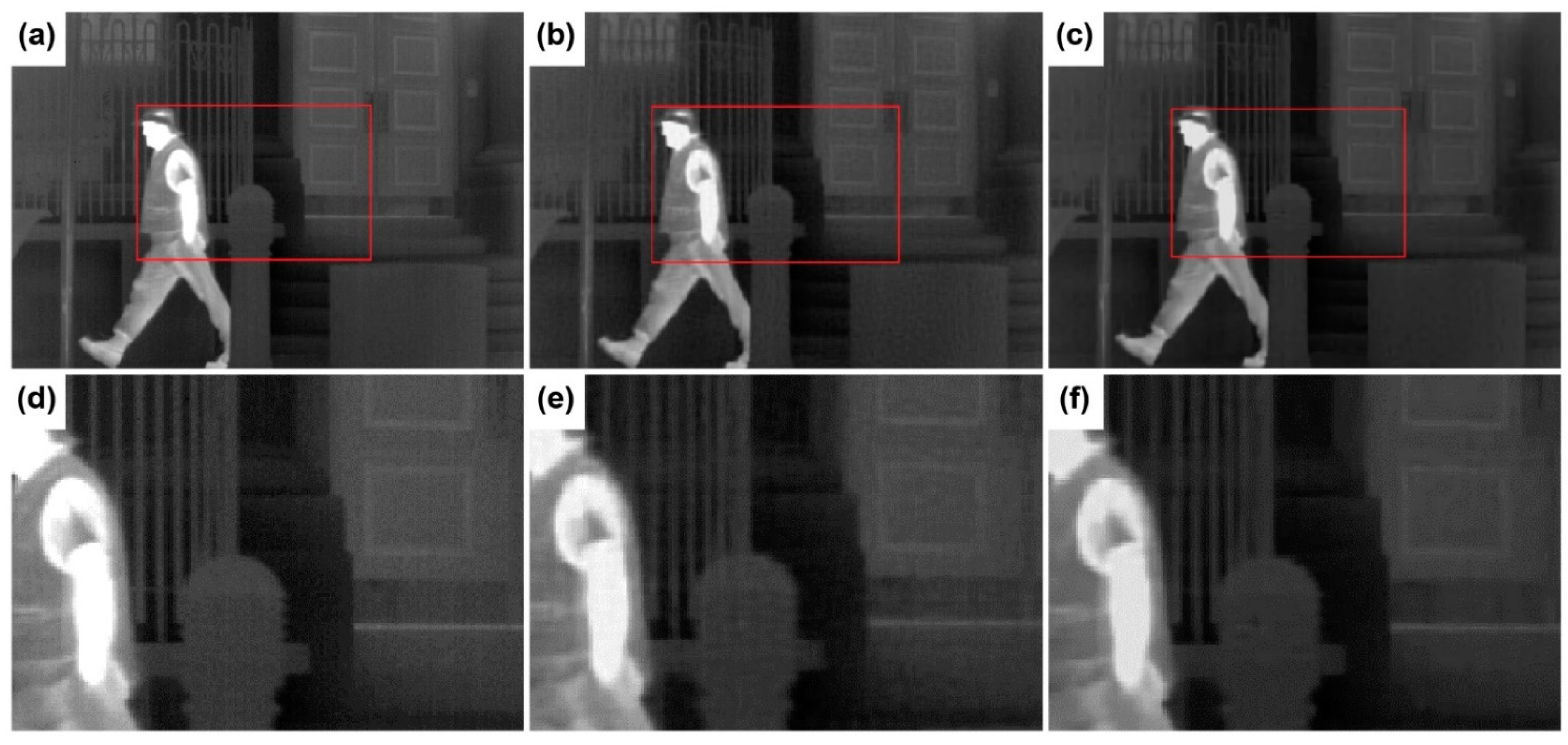
- Upon adding the different types of blur and levels of salt-and-pepper noise to a given test image, Lp_HOGS yielded stronger indicators than Lp_LOGS. This advantage became greater as the noise level increased. Therefore, the high-order prior information of the image improved the quality of the deblurred IR images and the stability of salt-and-pepper noise removal.
- The advantage of Lp_HOGS over Lp_LOGS was most obvious in terms of the motion blur, indicating that adding the prior constraints of the high-order gradient to the model could significantly improve the IR image deblurring effect amid the motion blur.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, J.; Yang, W.; Zhang, X. Infrared Image Processing, Analysis, and Fusion; Science Press: Beijing, China, 2009; pp. 7–12. Available online: https://max.book118.com/html/2019/0105/5210100330001344.shtm (accessed on 15 January 2022).
- Fan, Z.; Bi, D.; He, L.; Ma, S. Noise suppression and details enhancement for infrared image via novel prior. Infrared Phys. Technol. 2016, 74, 44–52. [Google Scholar] [CrossRef]
- Faragallah, O.S.; Ibrahem, H.M. Adaptive switching weighted median filter framework for suppressing salt-and-pepper noise. Int. J. Electron. Commun. 2016, 70, 1034–1040. [Google Scholar] [CrossRef]
- Afraites, L.; Hadri, A.; Laghrib, A. A denoising model adapted for impulse and Gaussian noises using a constrained-PDE. Inverse Probl. 2020, 36, 025006. [Google Scholar] [CrossRef]
- Lim, H.; Williams, T.N. A Non-standard Anisotropic Diffusion for Speckle Noise Removal. Syst. Cybern. Inform. 2007, 5, 12–17. Available online: http://www.iiisci.org/Journal/pdv/sci/pdfs/P610066.pdf (accessed on 16 August 2022).
- Osher, S.; Burger, M.; Goldfarb, D.; Jinjun, X.; Wotao, Y. An iterative regularization method for total variation-based image restoration. Multiscale Model. Simul. 2005, 4, 460–489. [Google Scholar] [CrossRef]
- Peng, Z.; Chen, Y.; Pu, T.; Wang, Y.; He, Y. Image denoising based on sparse representation and regularization constraint: A Review. J. Data Acquis. Process. 2018, 33, 1–11. Available online: http://www.cnki.com.cn/Article/CJFDTotal-SJCJ201801001.htm (accessed on 16 December 2021).
- Li, S.; He, Y.; Chen, Y.; Liu, W.; Yang, X.; Peng, Z. Fast multi-trace impedance inversion using anisotropic total p-variation regularization in the frequency domain. J. Geophys. Eng. 2018, 15, 2171–2182. [Google Scholar] [CrossRef]
- Wu, H.; He, Y.; Chen, Y.; Shu, L.; Peng, Z. Seismic acoustic impedance inversion using mixed second-order fractional ATpV regularization. IEEE Access 2020, 8, 3442–3452. [Google Scholar] [CrossRef]
- Liu, G.; Huang, T.Z.; Liu, J.; Lv, X.G. Total variation with overlapping group sparsity for image deblurring under impulse noise. PLoS ONE 2015, 10, e0122562. [Google Scholar] [CrossRef]
- Yuan, G.; Ghanem, B. l0tv: A new method for image restoration in the presence of impulse noise. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 5369–5377. [Google Scholar]
- Adam, T.; Paramesran, R. Image denoising using combined higher order non-convex total variation with overlapping group sparsity. J. Multidimens. Syst. Signal Process. 2019, 30, 503–527. [Google Scholar] [CrossRef]
- Chartrand, R. Exact reconstruction of sparse signals via nonconvex minimization. IEEE Signal Process. Lett. 2007, 14, 707–710. [Google Scholar] [CrossRef]
- Chartrand, R. Shrinkage mappings and their induced penalty functions. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014; pp. 1026–1029. [Google Scholar] [CrossRef] [Green Version]
- Chartrand, R.; Staneva, V. Restricted isometry properties and nonconvex compressive sensing. Inverse Probl. 2008, 24, 035020. [Google Scholar] [CrossRef]
- Wu, R.; Chen, D.R. The improved bounds of restricted isometry constant for recovery via l(p)-minimization. IEEE Trans. Inf. Theory 2013, 59, 6142–6147. [Google Scholar] [CrossRef]
- Wen, J.; Li, D.; Zhu, F. Stable recovery of sparse signals via lp-minimization. Appl. Comput. Harmon. Anal. 2015, 38, 161–176. [Google Scholar] [CrossRef]
- Chen, Y.; Peng, Z.; Gholami, A.; Yan, J.; Li, S. Seismic signal sparse time-frequency representation by Lp-quasinorm constraint. Digital Signal Process. 2019, 87, 43–59. [Google Scholar] [CrossRef]
- Liu, X.; Chen, Y.; Peng, Z.; Wu, J. Total variation with overlapping group sparsity and Lp quasinorm for infrared image deblurring under salt-and-pepper noise. J. Electron. Imaging 2019, 28, 043031. [Google Scholar] [CrossRef]
- Liu, X.; Chen, Y.; Peng, Z.; Wu, J.; Wang, Z. Infrared image super-resolution reconstruction based on quaternion fractional order total variation with Lp quasinorm. Appl. Sci. 2018, 8, 1864. [Google Scholar] [CrossRef]
- Xu, J.; Chen, Y. Method of removing salt and pepper noise based on total variation technique and Lp pseudo-norm. J. Data Acquis. Process. 2020, 35, 89–99. Available online: https://qikan.cqvip.com/Qikan/Article/Detail?id=7100955546 (accessed on 16 August 2022).
- Lin, F.; Chen, Y.; Chen, Y.; Yu, F. Image deblurring under impulse noise via total generalized variation and non-convex shrinkage. Algorithms 2019, 12, 221. [Google Scholar] [CrossRef]
- Wang, L.; Chen, Y.; Lin, F.; Chen, Y.; Yu, F.; Cai, Z. Impulse noise denoising using total variation with overlapping group sparsity and Lp-pseudo-norm shrinkage. Appl. Sci. 2018, 8, 2317. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image | Noise Level (%) | Lp_LOGS | Lp_HOGS | ||||
|---|---|---|---|---|---|---|---|
| PSNR (dB) | SSIM | GMSD | PSNR (dB) | SSIM | GMSD | ||
| Passerby | 30 | 40.8630 | 0.9455 | 0.0165 | 41.1052 | 0.9511 | 0.0118 |
| 40 | 39.8587 | 0.9397 | 0.0197 | 40.6369 | 0.9505 | 0.0139 | |
| 50 | 38.3621 | 0.9247 | 0.0310 | 39.7808 | 0.9422 | 0.0178 | |
| Station | 30 | 39.7670 | 0.9466 | 0.0126 | 39.9526 | 0.9504 | 0.0083 |
| 40 | 38.8663 | 0.9413 | 0.0146 | 39.6986 | 0.9497 | 0.0104 | |
| 50 | 37.7629 | 0.9323 | 0.0177 | 38.5159 | 0.9428 | 0.0131 | |
| Truck | 30 | 39.6943 | 0.9472 | 0.0096 | 39.8380 | 0.9502 | 0.0080 |
| 40 | 38.4550 | 0.9391 | 0.0122 | 39.2490 | 0.9491 | 0.0092 | |
| 50 | 36.8715 | 0.9253 | 0.0254 | 38.4970 | 0.9420 | 0.0119 | |
| Garden | 30 | 41.0244 | 0.9804 | 0.0115 | 41.2420 | 0.9879 | 0.0091 |
| 40 | 40.5242 | 0.9781 | 0.0135 | 40.8009 | 0.9871 | 0.0099 | |
| 50 | 39.2265 | 0.9729 | 0.0214 | 40.0002 | 0.9850 | 0.0119 | |
| Stairs | 30 | 41.0574 | 0.9826 | 0.0124 | 41.4211 | 0.9898 | 0.0084 |
| 40 | 40.1333 | 0.9801 | 0.0135 | 40.9604 | 0.9892 | 0.0096 | |
| 50 | 38.6847 | 0.9709 | 0.0273 | 40.0652 | 0.9868 | 0.0114 | |
| Corridor | 30 | 40.3201 | 0.9813 | 0.0128 | 40.7789 | 0.9904 | 0.0092 |
| 40 | 39.4102 | 0.9775 | 0.0156 | 40.4021 | 0.9897 | 0.0105 | |
| 50 | 38.2169 | 0.9719 | 0.0300 | 39.6962 | 0.9872 | 0.0127 | |
| Car | 30 | 39.5951 | 0.9456 | 0.0129 | 39.9887 | 0.9502 | 0.0088 |
| 40 | 38.6298 | 0.9397 | 0.0183 | 39.7841 | 0.9486 | 0.0103 | |
| 50 | 36.7113 | 0.9101 | 0.0229 | 38.5019 | 0.9409 | 0.0163 | |
| Buildings | 30 | 39.3587 | 0.9547 | 0.0171 | 39.8475 | 0.9606 | 0.0120 |
| 40 | 38.6073 | 0.9487 | 0.0190 | 39.2298 | 0.9589 | 0.0145 | |
| 50 | 37.3181 | 0.9249 | 0.0345 | 38.6869 | 0.9531 | 0.0160 | |
| Zebra crossing | 30 | 39.9135 | 0.9868 | 0.0112 | 40.1558 | 0.9906 | 0.0099 |
| 40 | 38.9183 | 0.9843 | 0.0137 | 39.7001 | 0.9900 | 0.0111 | |
| 50 | 37.7372 | 0.9755 | 0.0264 | 38.7267 | 0.9879 | 0.0133 | |
| Image | Noise Level (%) | Lp_LOGS | Lp_HOGS | ||||
|---|---|---|---|---|---|---|---|
| PSNR (dB) | SSIM | GMSD | PSNR (dB) | SSIM | GMSD | ||
| Passerby | 30 | 40.8217 | 0.9457 | 0.0180 | 41.0760 | 0.9535 | 0.0124 |
| 40 | 40.1691 | 0.9402 | 0.0194 | 40.7809 | 0.9518 | 0.0144 | |
| 50 | 38.7155 | 0.9303 | 0.0281 | 40.2154 | 0.9497 | 0.0159 | |
| Station | 30 | 39.8743 | 0.9474 | 0.0094 | 40.1122 | 0.9532 | 0.0080 |
| 40 | 39.1676 | 0.9415 | 0.0114 | 39.7945 | 0.9521 | 0.0085 | |
| 50 | 37.9245 | 0.9348 | 0.0268 | 39.1034 | 0.9487 | 0.0147 | |
| Truck | 30 | 39.9195 | 0.9480 | 0.0091 | 40.1125 | 0.9534 | 0.0070 |
| 40 | 39.1053 | 0.9415 | 0.0108 | 39.7635 | 0.9520 | 0.0080 | |
| 50 | 37.4036 | 0.9304 | 0.0252 | 38.7291 | 0.9481 | 0.0108 | |
| Garden | 30 | 41.1108 | 0.9821 | 0.0107 | 41.3335 | 0.9872 | 0.0100 |
| 40 | 40.3230 | 0.9766 | 0.0167 | 40.8003 | 0.9863 | 0.0114 | |
| 50 | 39.0822 | 0.9658 | 0.0279 | 39.8915 | 0.9853 | 0.0126 | |
| Stairs | 30 | 41.0179 | 0.9832 | 0.0126 | 41.5490 | 0.9895 | 0.0102 |
| 40 | 40.0870 | 0.9786 | 0.0173 | 41.1270 | 0.9887 | 0.0117 | |
| 50 | 38.6422 | 0.9701 | 0.0255 | 40.0578 | 0.9872 | 0.0133 | |
| Corridor | 30 | 40.4221 | 0.9818 | 0.0162 | 41.0429 | 0.9905 | 0.0093 |
| 40 | 39.3766 | 0.9758 | 0.0247 | 40.5461 | 0.9897 | 0.0106 | |
| 50 | 37.7766 | 0.9578 | 0.0424 | 39.4056 | 0.9882 | 0.0123 | |
| Car | 30 | 39.6822 | 0.9454 | 0.0106 | 40.0593 | 0.9528 | 0.0090 |
| 40 | 38.8954 | 0.9362 | 0.0136 | 39.8088 | 0.9511 | 0.0106 | |
| 50 | 37.5309 | 0.9199 | 0.0340 | 38.9581 | 0.9466 | 0.0136 | |
| Buildings | 30 | 39.6155 | 0.9534 | 0.0129 | 40.2602 | 0.9642 | 0.0099 |
| 40 | 38.9742 | 0.9496 | 0.0154 | 39.7577 | 0.9618 | 0.0114 | |
| 50 | 37.5042 | 0.9338 | 0.0258 | 39.3106 | 0.9594 | 0.0125 | |
| Zebra crossing | 30 | 40.0891 | 0.9851 | 0.0127 | 40.2653 | 0.9904 | 0.0104 |
| 40 | 38.9207 | 0.9816 | 0.0209 | 39.8872 | 0.9896 | 0.0118 | |
| 50 | 37.6985 | 0.9721 | 0.0308 | 38.8089 | 0.9884 | 0.0136 | |
| Image | Noise Level (%) | Lp_LOGS | Lp_HOGS | |||||
|---|---|---|---|---|---|---|---|---|
| PSNR (dB) | SSIM | GMSD | PSNR (dB) | SSIM | GMSD | |||
| Passerby | 30 | 41.4154 | 0.9473 | 0.0224 | 42.7863 | 0.9643 | 0.0109 | |
| 40 | 40.0856 | 0.9324 | 0.0384 | 41.4734 | 0.9594 | 0.0176 | ||
| 50 | 38.0234 | 0.9293 | 0.0487 | 40.0456 | 0.9535 | 0.0311 | ||
| Station | 30 | 41.0730 | 0.9534 | 0.0134 | 42.2171 | 0.9660 | 0.0048 | |
| 40 | 39.3011 | 0.9415 | 0.0253 | 40.7997 | 0.9629 | 0.0088 | ||
| 50 | 36.5096 | 0.9263 | 0.0349 | 38.5807 | 0.9573 | 0.0139 | ||
| Truck | 30 | 41.1586 | 0.9441 | 0.0132 | 42.1004 | 0.9665 | 0.0039 | |
| 40 | 39.1459 | 0.9408 | 0.0178 | 41.0177 | 0.9639 | 0.0058 | ||
| 50 | 36.0788 | 0.9372 | 0.0291 | 39.1823 | 0.9590 | 0.0117 | ||
| Garden | 30 | 43.1018 | 0.9877 | 0.0116 | 44.4994 | 0.9929 | 0.0063 | |
| 40 | 41.6052 | 0.9857 | 0.0144 | 43.3407 | 0.9913 | 0.0096 | ||
| 50 | 38.3654 | 0.9733 | 0.0356 | 40.5691 | 0.9876 | 0.0269 | ||
| Stairs | 30 | 43.2679 | 0.9900 | 0.0133 | 44.7027 | 0.9947 | 0.0102 | |
| 40 | 41.3666 | 0.9861 | 0.0221 | 42.9469 | 0.9939 | 0.0119 | ||
| 50 | 38.2970 | 0.9779 | 0.0330 | 40.0135 | 0.9884 | 0.0343 | ||
| Corridor | 30 | 41.8418 | 0.9888 | 0.0138 | 43.5307 | 0.9939 | 0.0092 | |
| 40 | 40.0657 | 0.9841 | 0.0281 | 41.8881 | 0.9920 | 0.0132 | ||
| 50 | 37.3735 | 0.9703 | 0.0404 | 39.4419 | 0.9854 | 0.0368 | ||
| Car | 30 | 41.1081 | 0.9562 | 0.0084 | 42.2795 | 0.9664 | 0.0048 | |
| 40 | 38.9419 | 0.9439 | 0.0155 | 40.9768 | 0.9635 | 0.0074 | ||
| 50 | 35.9764 | 0.9350 | 0.0406 | 38.7575 | 0.9583 | 0.0157 | ||
| Buildings | 30 | 39.8062 | 0.9577 | 0.0203 | 41.3484 | 0.9716 | 0.0080 | |
| 40 | 37.7007 | 0.9430 | 0.0359 | 39.9433 | 0.9673 | 0.0137 | ||
| 50 | 34.1941 | 0.9151 | 0.0686 | 37.6026 | 0.9592 | 0.0243 | ||
| Zebra crossing | 30 | 41.8608 | 0.9909 | 0.0110 | 43.6546 | 0.9952 | 0.0061 | |
| 40 | 40.2476 | 0.9880 | 0.0167 | 42.0393 | 0.9934 | 0.0135 | ||
| 50 | 37.2561 | 0.9760 | 0.0414 | 39.2335 | 0.9891 | 0.0300 | ||
| Image | Noise Level | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 30% | 40% | 50% | ||||||||
| Method | PSNR | SSIM | GMSD | PSNR | SSIM | GMSD | PSNR | SSIM | GMSD | |
| Truck | ITV | 30.0291 | 0.8884 | 0.0616 | 29.5562 | 0.8893 | 0.0651 | 29.1880 | 0.8837 | 0.0691 |
| ATV | 35.3620 | 0.9228 | 0.0331 | 33.4723 | 0.9087 | 0.0412 | 31.4261 | 0.8976 | 0.0529 | |
| HNHOTV-OGS | 36.9788 | 0.9246 | 0.0280 | 34.6626 | 0.9037 | 0.0365 | 32.1012 | 0.8763 | 0.0490 | |
| L0TVPADMM | 37.1920 | 0.9033 | 0.0271 | 36.5800 | 0.8964 | 0.0291 | 35.5870 | 0.8682 | 0.0326 | |
| Lp_HOGS | 39.8380 | 0.9502 | 0.0080 | 39.2490 | 0.9491 | 0.0092 | 38.4970 | 0.9420 | 0.0119 | |
| Garden | ITV | 36.4479 | 0.9357 | 0.0379 | 36.0066 | 0.9318 | 0.0400 | 34.5629 | 0.9233 | 0.0456 |
| ATV | 37.1587 | 0.9376 | 0.0352 | 36.6090 | 0.9321 | 0.0385 | 35.2160 | 0.9221 | 0.0432 | |
| HNHOTV-OGS | 38.8667 | 0.9429 | 0.0290 | 37.7810 | 0.9328 | 0.0329 | 36.5325 | 0.9163 | 0.0380 | |
| L0TVPADMM | 39.2100 | 0.9290 | 0.0274 | 39.0490 | 0.9347 | 0.0287 | 38.7830 | 0.9260 | 0.0293 | |
| Lp_HOGS | 41.2420 | 0.9879 | 0.0091 | 40.8009 | 0.9871 | 0.0099 | 40.0002 | 0.9850 | 0.0119 | |
| Stairs | ITV | 36.1477 | 0.9353 | 0.0480 | 35.5521 | 0.9303 | 0.0517 | 34.4880 | 0.9225 | 0.0562 |
| ATV | 37.2454 | 0.9394 | 0.0426 | 36.3834 | 0.9312 | 0.0469 | 35.4070 | 0.9222 | 0.0517 | |
| HNHOTV-OGS | 38.2716 | 0.9351 | 0.0375 | 37.1927 | 0.9226 | 0.0425 | 35.8911 | 0.9027 | 0.0494 | |
| L0TVPADMM | 38.8690 | 0.9273 | 0.0350 | 38.6270 | 0.9251 | 0.0360 | 38.3940 | 0.9227 | 0.0370 | |
| Lp_HOGS | 41.4211 | 0.9898 | 0.0084 | 40.9604 | 0.9892 | 0.0096 | 40.0652 | 0.9872 | 0.0127 | |
| Corridor | ITV | 35.1721 | 0.9273 | 0.0544 | 34.5450 | 0.9227 | 0.0581 | 33.8964 | 0.9122 | 0.0676 |
| ATV | 35.7739 | 0.9299 | 0.0519 | 34.8115 | 0.9202 | 0.0565 | 33.9243 | 0.9078 | 0.0628 | |
| HNHOTV-OGS | 37.4461 | 0.9281 | 0.0420 | 36.4630 | 0.9151 | 0.0470 | 34.9757 | 0.8995 | 0.0558 | |
| L0TVPADMM | 38.5150 | 0.9404 | 0.0373 | 38.4240 | 0.9395 | 0.0375 | 38.0550 | 0.9343 | 0.0391 | |
| Lp_HOGS | 40.7789 | 0.9904 | 0.0092 | 40.4021 | 0.9897 | 0.0105 | 39.6962 | 0.9872 | 0.0127 | |
| Road | ITV | 34.1196 | 0.9351 | 0.0443 | 33.5094 | 0.9300 | 0.0472 | 32.6307 | 0.9202 | 0.0520 |
| ATV | 34.7909 | 0.9377 | 0.0411 | 33.8026 | 0.9289 | 0.0456 | 32.7069 | 0.9155 | 0.0515 | |
| HNHOTV-OGS | 37.3621 | 0.9451 | 0.0302 | 36.3655 | 0.9355 | 0.0338 | 34.8160 | 0.9167 | 0.0404 | |
| L0TVPADMM | 38.5640 | 0.9462 | 0.0262 | 38.0270 | 0.9378 | 0.0276 | 37.7320 | 0.9401 | 0.0289 | |
| Lp_HOGS | 40.6179 | 0.9926 | 0.0077 | 40.1633 | 0.9921 | 0.0088 | 39.0861 | 0.9901 | 0.0119 | |
| Buildings | ITV | 30.1056 | 0.8555 | 0.0613 | 29.7495 | 0.8454 | 0.0645 | 29.2963 | 0.8365 | 0.0676 |
| ATV | 34.8630 | 0.9071 | 0.0374 | 33.1033 | 0.8860 | 0.0443 | 30.4774 | 0.8579 | 0.0585 | |
| HNHOTV-OGS | 36.8107 | 0.9336 | 0.0286 | 34.9021 | 0.9140 | 0.0356 | 32.4871 | 0.8845 | 0.0470 | |
| L0TVPADMM | 37.0520 | 0.9258 | 0.0276 | 36.1780 | 0.9121 | 0.0305 | 35.5460 | 0.8971 | 0.0328 | |
| Lp_HOGS | 39.8475 | 0.9606 | 0.0120 | 39.2298 | 0.9589 | 0.0145 | 38.6869 | 0.9531 | 0.0160 | |
| Car | ITV | 30.9921 | 0.8883 | 0.0555 | 30.6337 | 0.8809 | 0.0578 | 30.2899 | 0.8763 | 0.0602 |
| ATV | 36.0531 | 0.9175 | 0.0310 | 34.6872 | 0.9013 | 0.0363 | 32.1603 | 0.8813 | 0.0485 | |
| HNHOTV-OGS | 37.1645 | 0.9217 | 0.0273 | 35.1484 | 0.8987 | 0.0344 | 32.7652 | 0.8685 | 0.0453 | |
| L0TVPADMM | 37.6620 | 0.9099 | 0.0255 | 37.0140 | 0.8986 | 0.0275 | 36.0630 | 0.8790 | 0.0307 | |
| Lp_HOGS | 39.9887 | 0.9502 | 0.0088 | 39.7841 | 0.9486 | 0.0103 | 38.5019 | 0.9409 | 0.0163 | |
| Figure | ITV | 29.1305 | 0.8744 | 0.0861 | 28.4494 | 0.8759 | 0.0931 | 27.5542 | 0.8740 | 0.1032 |
| ATV | 35.3557 | 0.9040 | 0.0420 | 33.2249 | 0.8911 | 0.0537 | 29.7096 | 0.8736 | 0.0806 | |
| HNHOTV-OGS | 35.2386 | 0.8793 | 0.0426 | 32.6695 | 0.8424 | 0.0573 | 30.0911 | 0.7974 | 0.0771 | |
| L0TVPADMM | 37.3870 | 0.8962 | 0.0318 | 36.7670 | 0.8834 | 0.0357 | 36.2720 | 0.8739 | 0.0378 | |
| Lp_HOGS | 40.9767 | 0.9431 | 0.0094 | 39.7917 | 0.9420 | 0.0147 | 38.7635 | 0.9378 | 0.0190 | |
| ZebraCrossing | ITV | 33.9752 | 0.9193 | 0.0454 | 33.4185 | 0.9134 | 0.0484 | 32.4327 | 0.9023 | 0.0542 |
| ATV | 34.8510 | 0.9267 | 0.0410 | 33.8304 | 0.9170 | 0.0462 | 32.9694 | 0.9032 | 0.0510 | |
| HNHOTV-OGS | 37.3081 | 0.9374 | 0.0309 | 36.1585 | 0.9271 | 0.0353 | 34.5367 | 0.9018 | 0.0426 | |
| L0TVPADMM | 38.3140 | 0.9391 | 0.0324 | 38.0470 | 0.9377 | 0.0284 | 37.1780 | 0.9284 | 0.0360 | |
| Lp_HOGS | 40.1558 | 0.9906 | 0.0099 | 39.7001 | 0.9900 | 0.0111 | 38.7267 | 0.9879 | 0.0133 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, Z.; Ou, X.; Huang, J.; Chen, Y. Infrared Image Deblurring Based on Lp-Pseudo-Norm and High-Order Overlapping Group Sparsity Regularization. Algorithms 2022, 15, 327. https://doi.org/10.3390/a15090327
Ye Z, Ou X, Huang J, Chen Y. Infrared Image Deblurring Based on Lp-Pseudo-Norm and High-Order Overlapping Group Sparsity Regularization. Algorithms. 2022; 15(9):327. https://doi.org/10.3390/a15090327
Chicago/Turabian StyleYe, Zhen, Xiaoming Ou, Juhua Huang, and Yingpin Chen. 2022. "Infrared Image Deblurring Based on Lp-Pseudo-Norm and High-Order Overlapping Group Sparsity Regularization" Algorithms 15, no. 9: 327. https://doi.org/10.3390/a15090327
APA StyleYe, Z., Ou, X., Huang, J., & Chen, Y. (2022). Infrared Image Deblurring Based on Lp-Pseudo-Norm and High-Order Overlapping Group Sparsity Regularization. Algorithms, 15(9), 327. https://doi.org/10.3390/a15090327