
On Parameter Identification for Reaction-Dominated Pore-Scale Reactive Transport Using Modified Bee Colony Algorithm



Abstract
:1. Introduction
2. Pore-Scale Reactive Transport
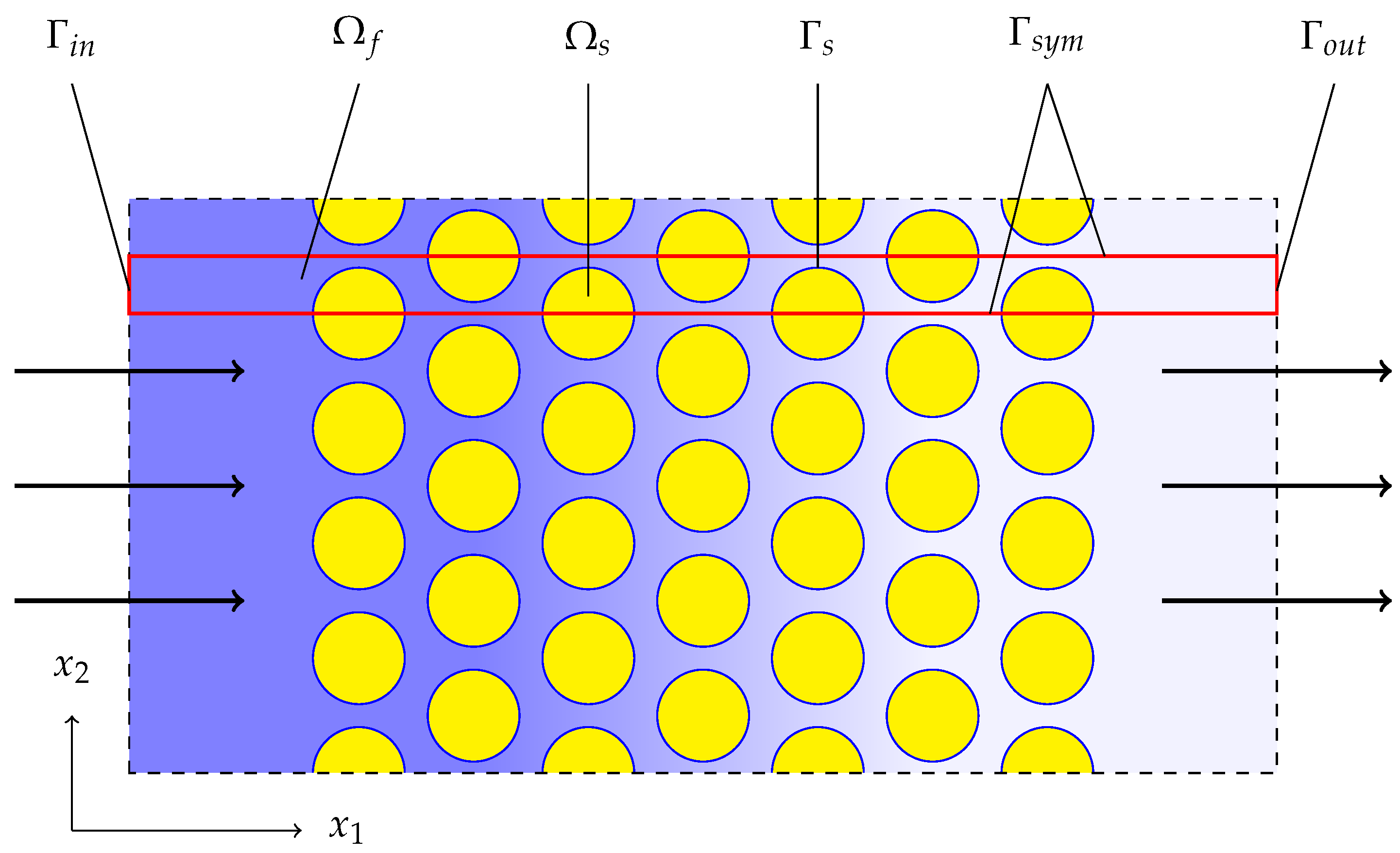
2.1. Flow Problem
2.2. Species Transport
3. Numerical Simulation
3.1. Variational Formulation
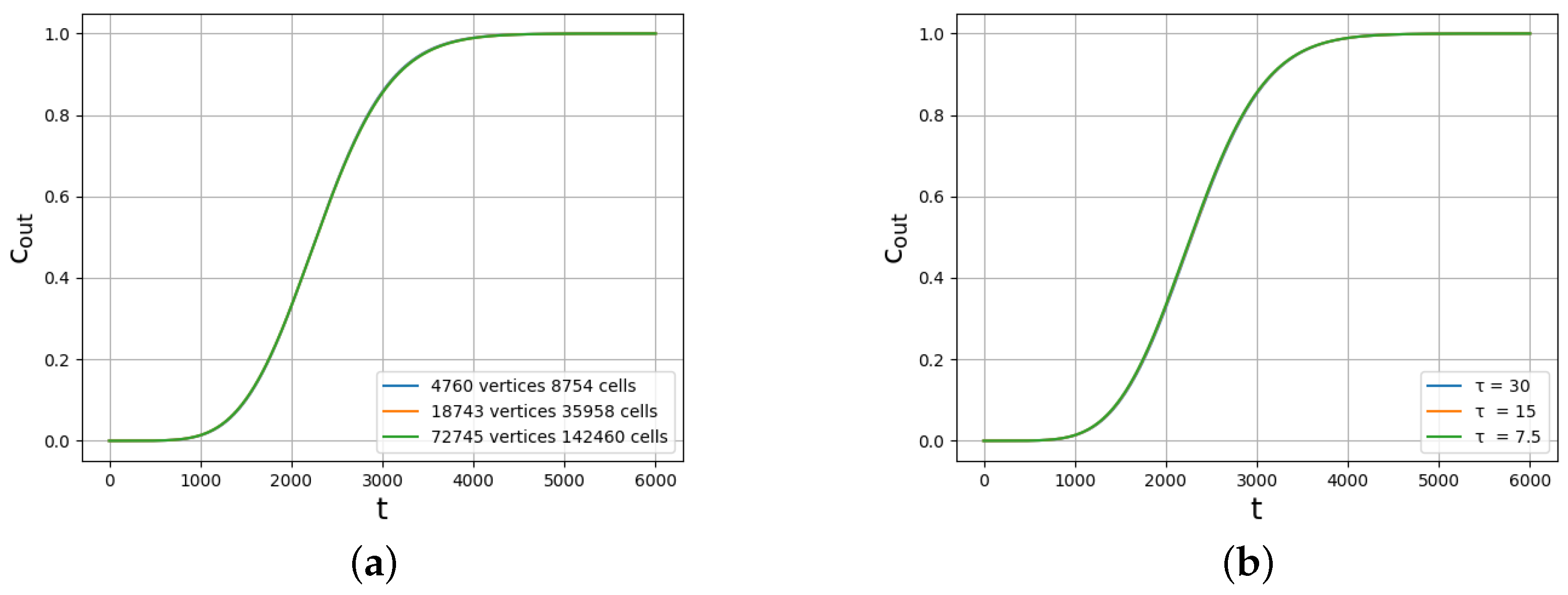
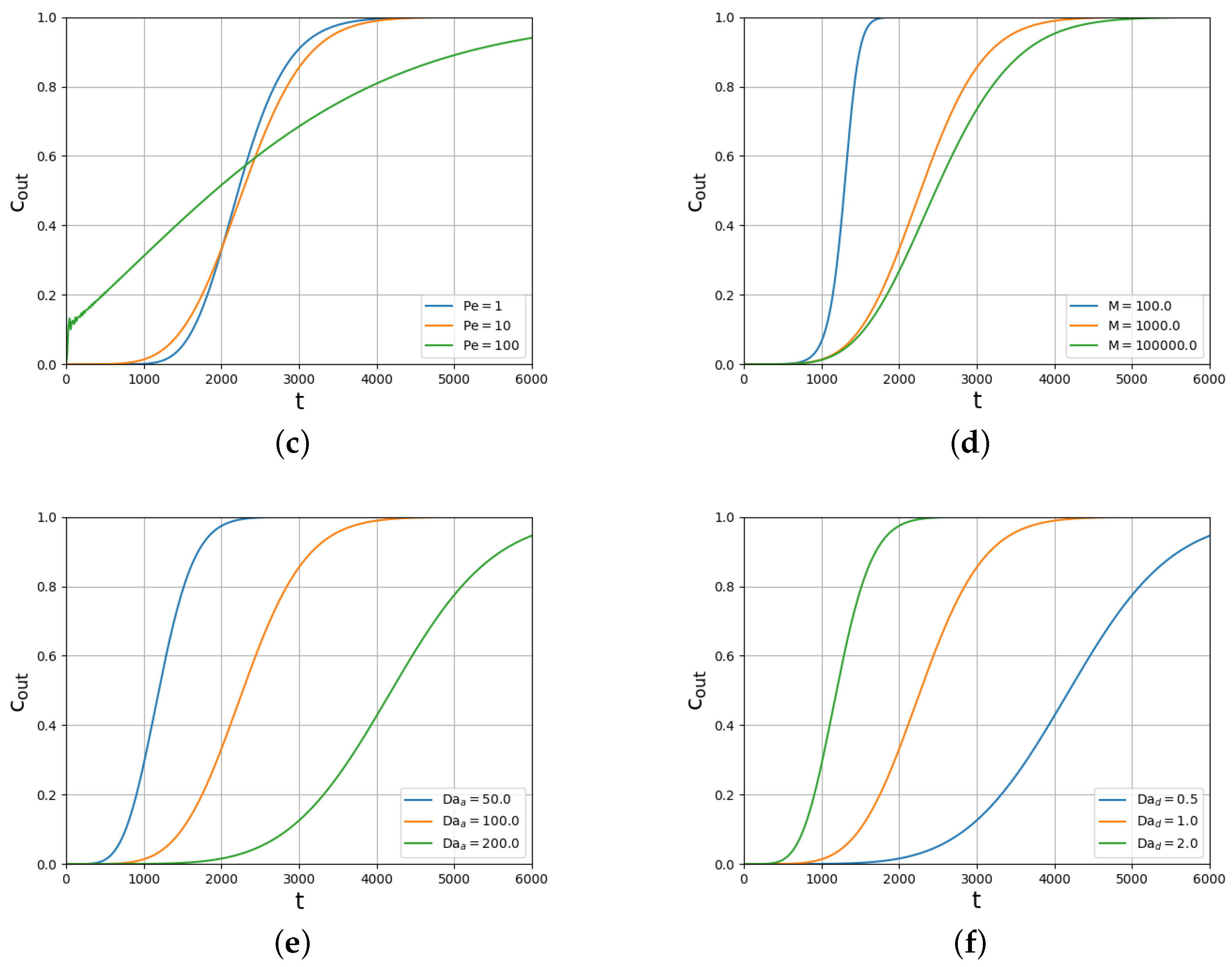
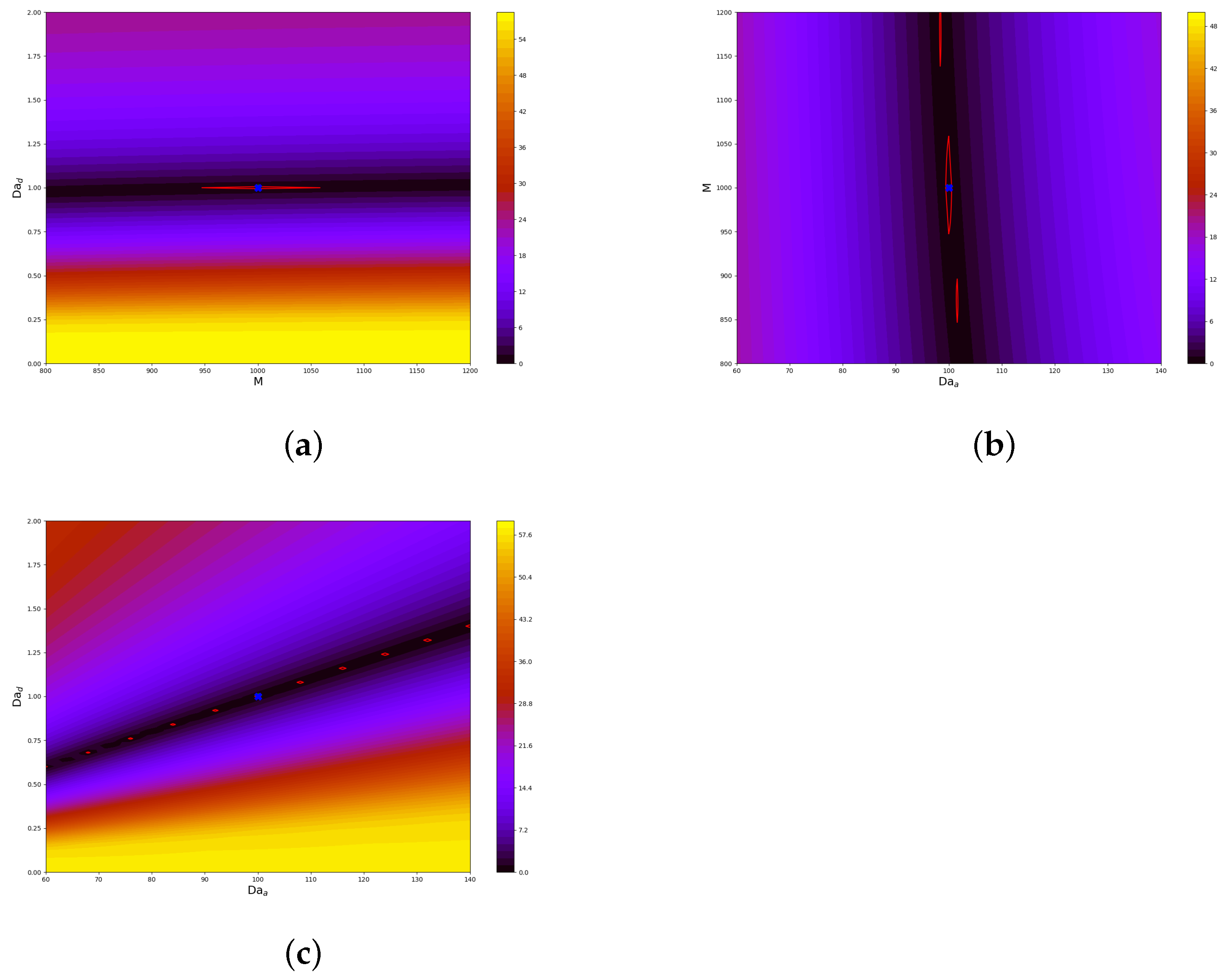
3.2. Geometry and Sensitivity Analysis
- ;
- ;
- ;
- .
4. Bee Colony Algorithms
4.1. A Modified Bee Colony Algorithm
- -
- The number of best locations, n;
- -
- The number of perspective locations, m;
- -
- The local area side lengths , where i here stands for the dimension of the problem;
- -
- The Euclidean distance value between two points in the parameter space, ;
- -
- The number of scout bees, ;
- -
- The number of agent bees at the best locations, ;
- -
- The number of agent bees on perspective locations, ;
- -
- The maximum number of iterations allowed for one location before shrinking;
- -
- The stopping criteria and to control the distance between the best locations in one local area for two consecutive iterations and to control the size of the local area, respectively.
- -
- This algorithm demonstrates competent division into local areas through the Euclidean distance;
- -
- The shrinkage of the area occurs after unsuccessful attempts, not after every failure, thus reducing the chance to miss local minima;
- -
- The shrinkage of the area is aggressive in order to achieve faster convergence and higher accuracy (it is adapted for the class of problems considered here);
- -
- When a local extremum is found, it is stored, and the bees from the local area disappear; at the same time, the search in the other local areas continues;
- -
- The stopping criteria is checked for each location individually.
| Algorithm 1: A modified Bee Colony algorithm pseudo-code. |
 |
4.2. Benchmark Testing
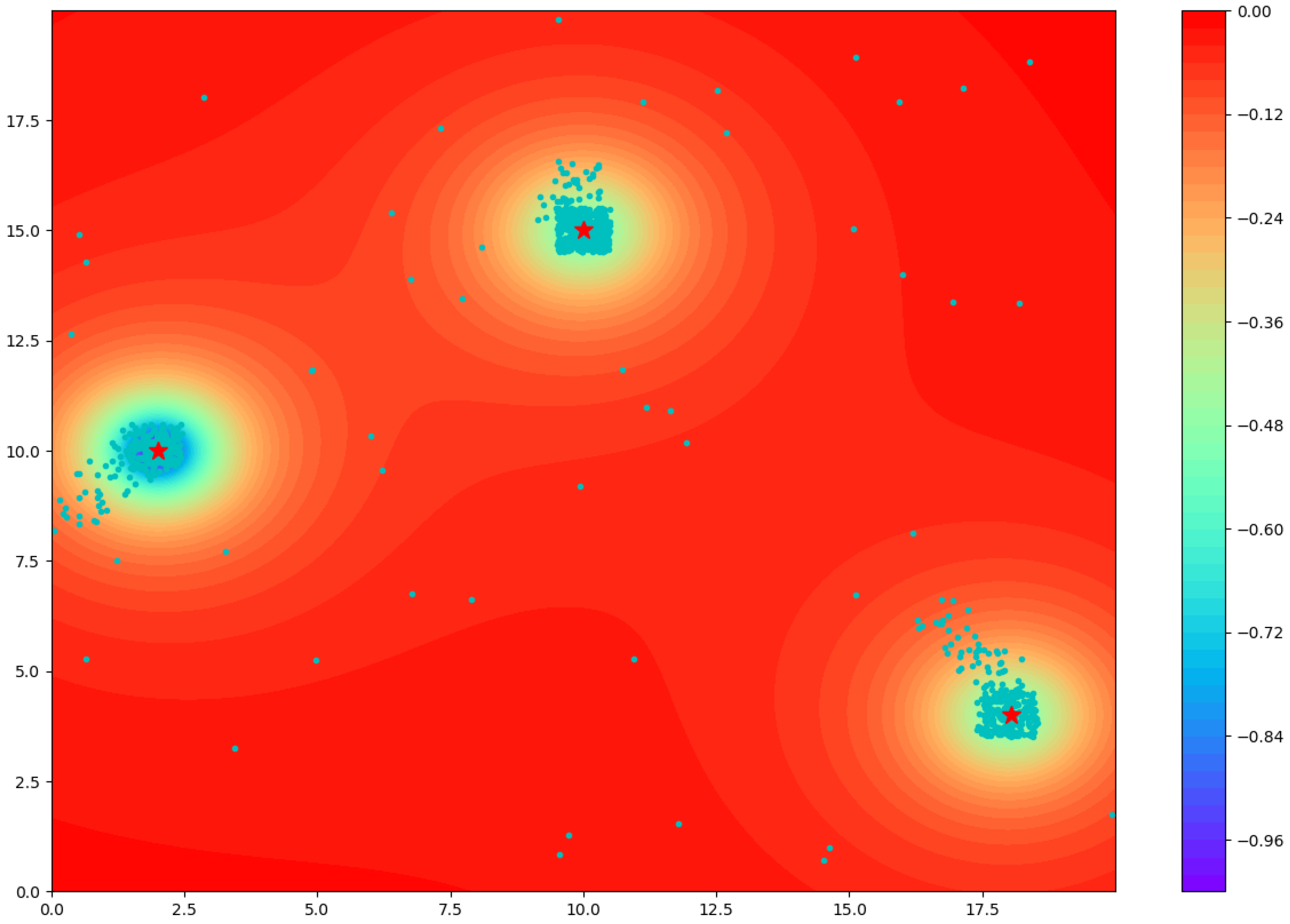
- Shekel function. This is a multidimensional, multimodal, continuous, deterministic function commonly used as a test function for testing optimization techniques [46];
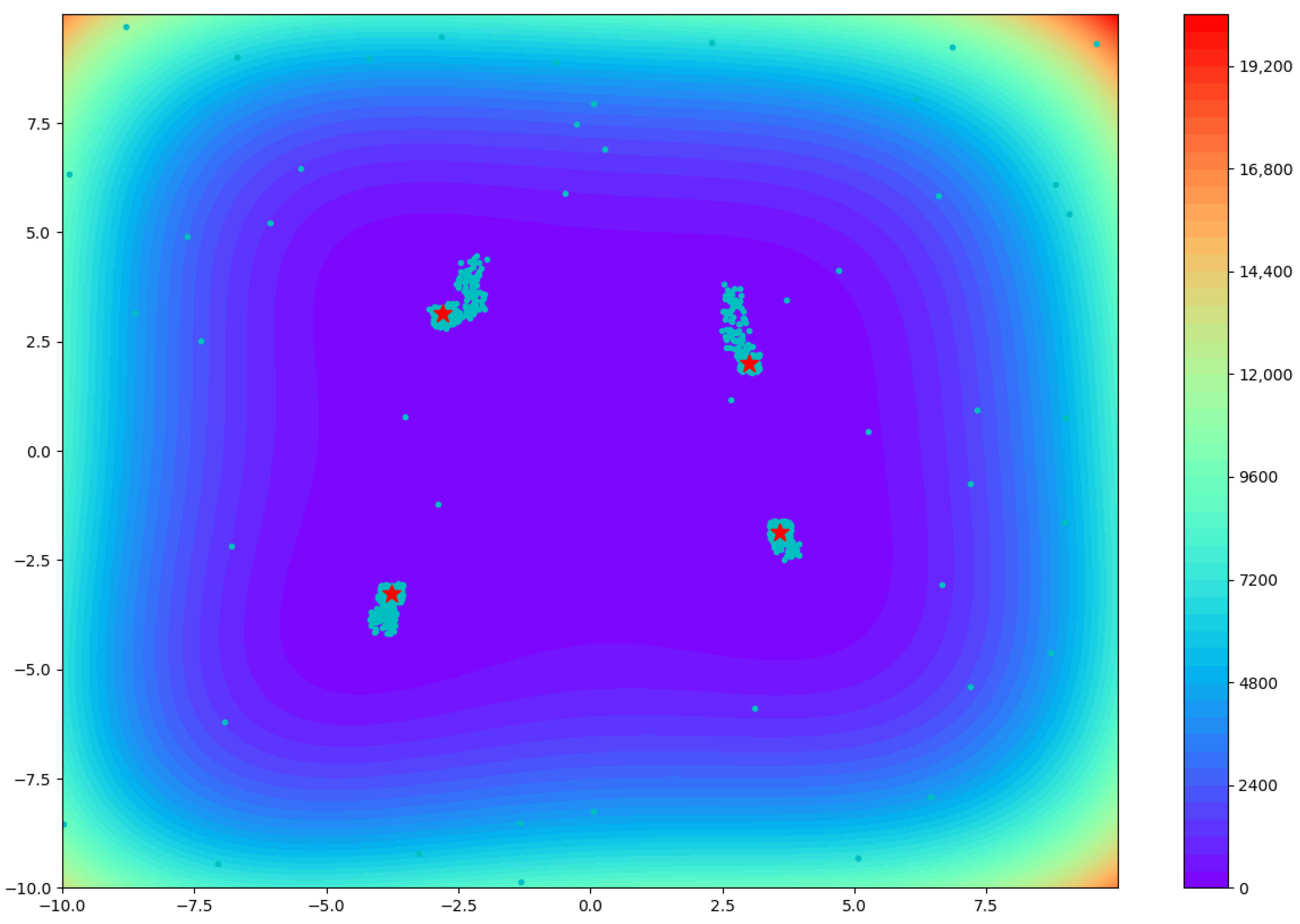
- Rosenbrock function. This is a non-convex function, introduced by Howard H. Rosenbrock in 1960 [47], which is used as a performance test problem for optimization algorithms. The global minimum is inside a long, narrow, parabolic-shaped flat valley. To find the valley is trivial. To converge to the global minimum, however, is difficult;
- Himmelblau function. This is a multi-modal function used to test the performance of optimization algorithms. The locations of all the minima can be found analytically. However, because they are roots of cubic polynomials, when written in terms of radicals, the expressions are somewhat complicated. The function is named after David Mautner Himmelblau, who introduced it [48];
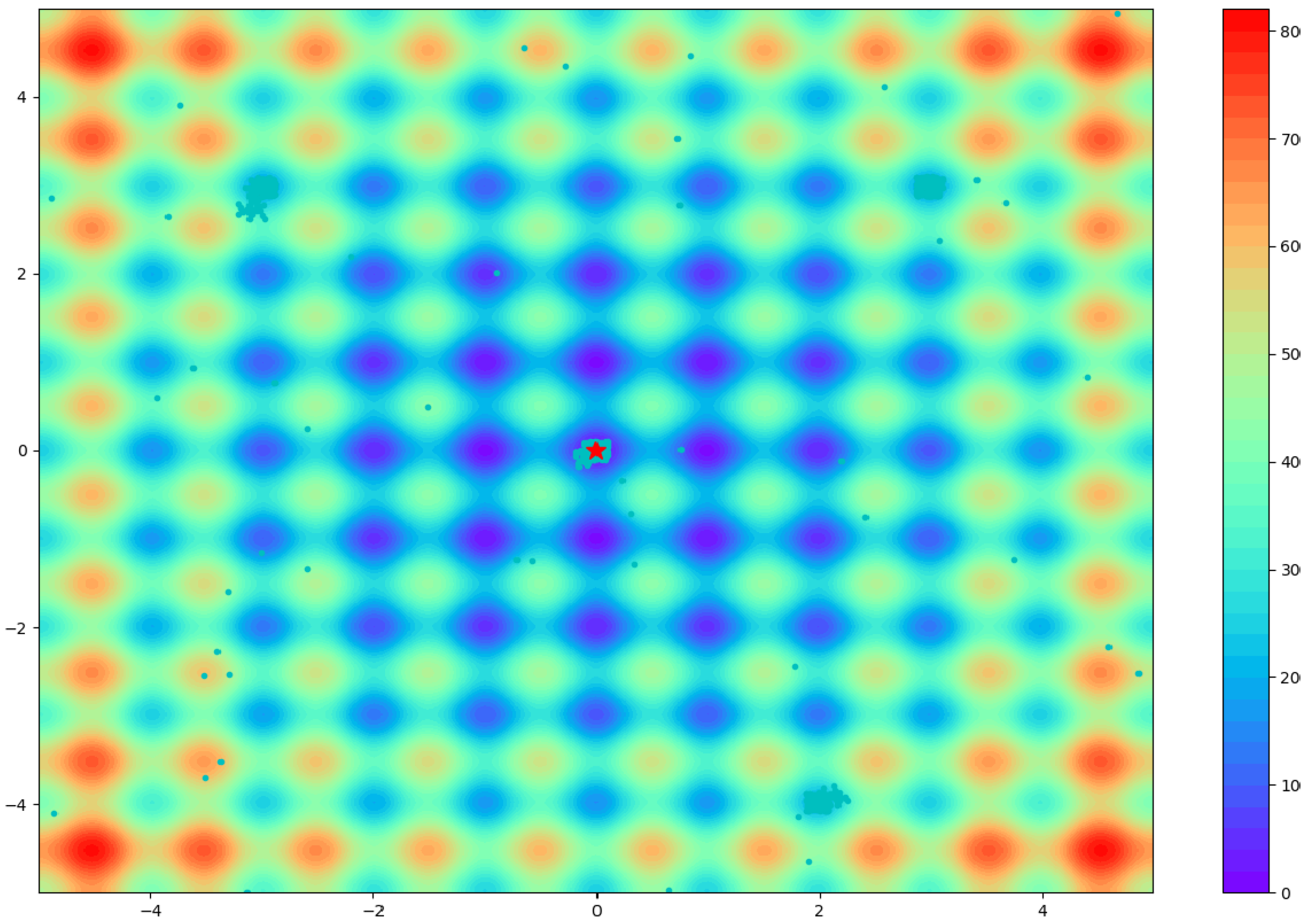
- Rastrigin function. This is a non-convex, non-linear multimodal function. It was first proposed by Rastrigin [49] as a 2-dimensional function and has been generalized by Rudolph [50]. The generalized version was popularized by Hoffmeister and Bäck [51] and Mühlenbein et al. [52]. Finding the minimum of this function is a fairly difficult problem due to its large search space and its large number of local minima.
5. Parameter Identification
5.1. Reaction-Dominated Case, Deterministic Approach
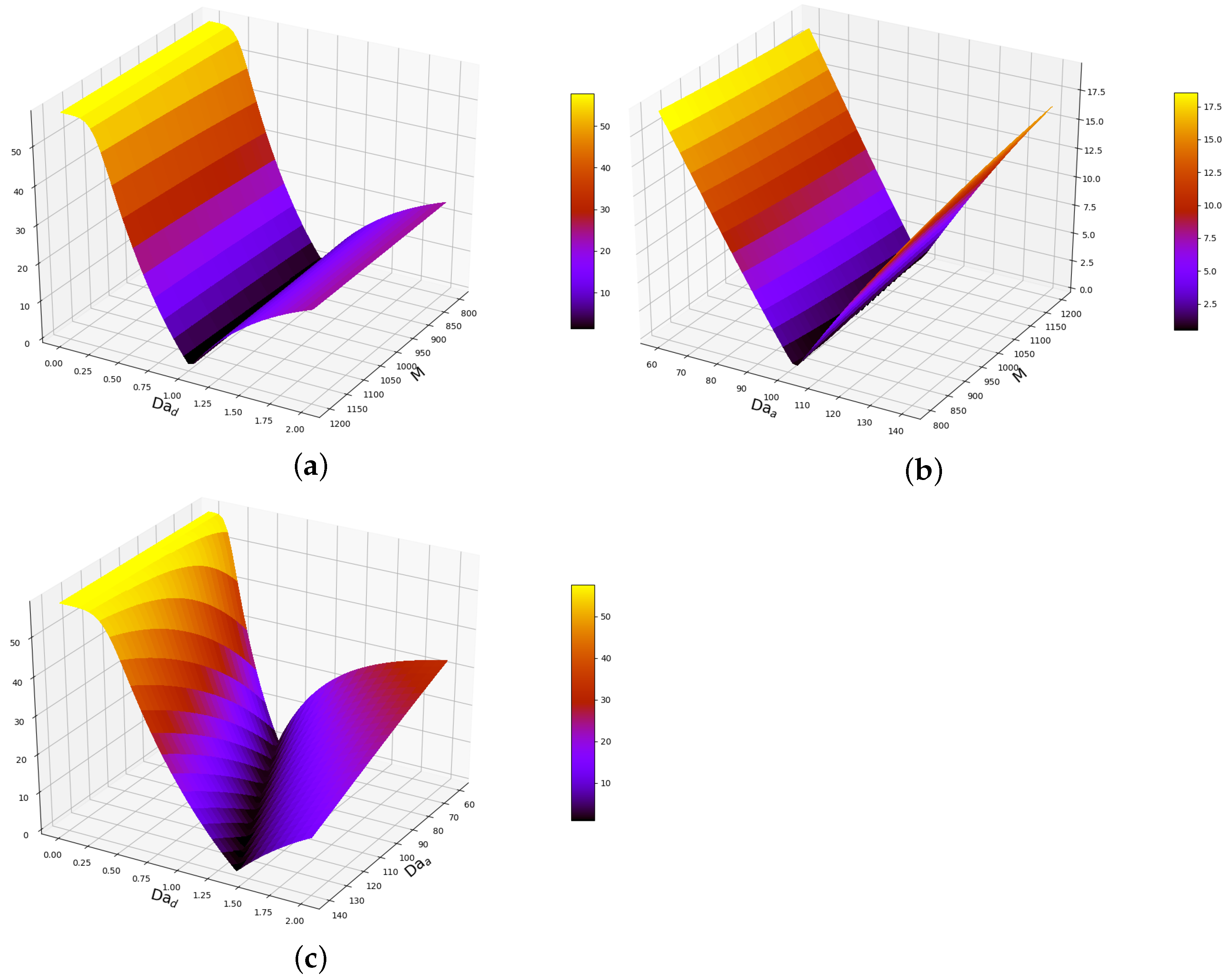
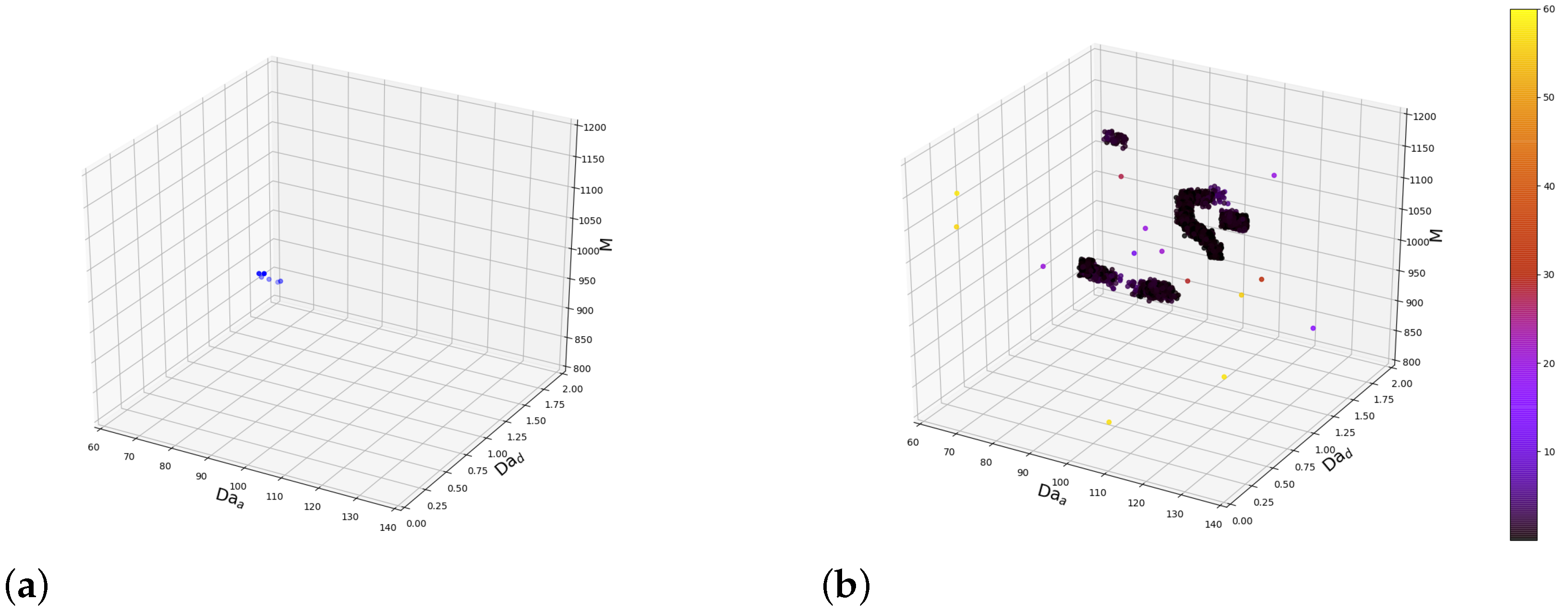
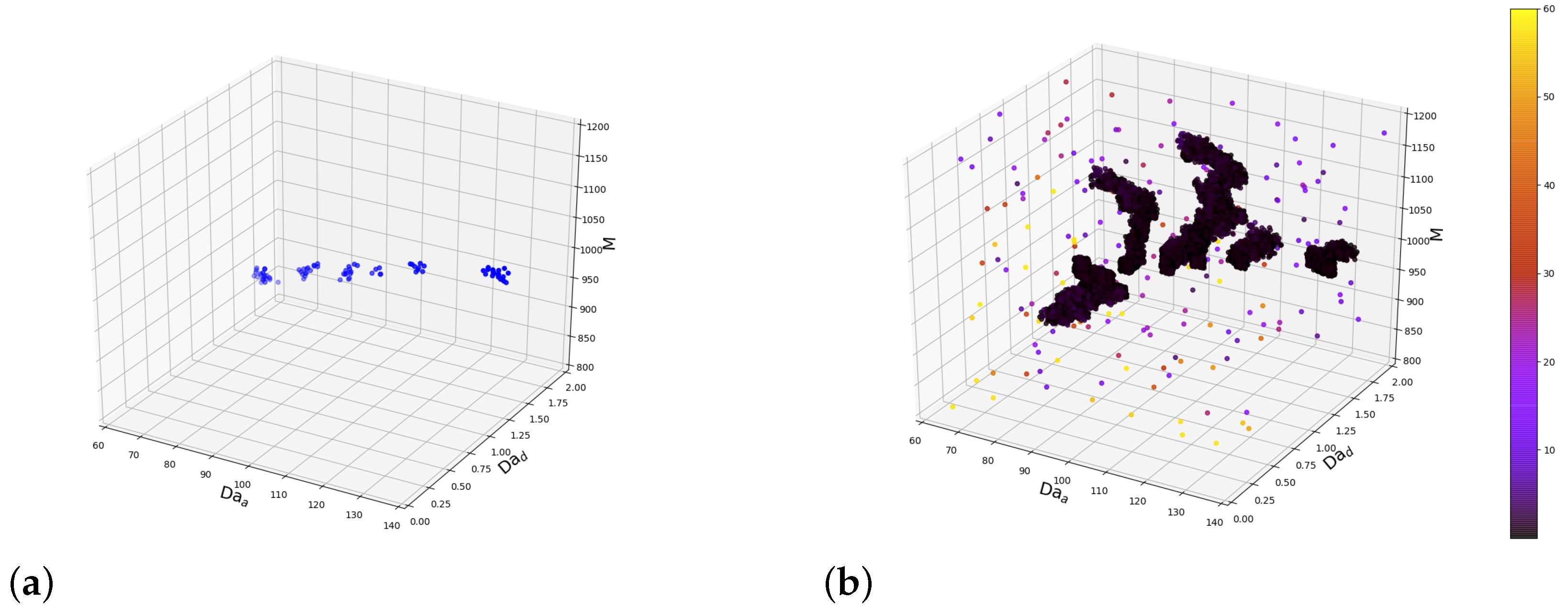
5.2. Reaction-Dominated Case, Modified Bee Colony Algorithm
- I:
- , , , ;
- II:
- , , , .
6. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MBC | Modified Bee Colony |
| BA | Bees Algorithm |
| BBA | Basic Bees Algorithm |
| ShBA | Shrinking-based Bees Algorithm |
| SBA | Standard Bees Algorithm |
| ABC | Artificial Bee Colony |
| FEM | Finite Element Method |
| NFE | Number of Function Evaluations |
References
- Bear, J. Dynamics of Fluids in Porous Media; Courier Corporation: New York, NY, USA, 2013. [Google Scholar]
- Helmig, R. Multiphase Flow and Transport Processes in the Subsurface: A Contribution to the Modeling of Hydrosystems; Springer: Berlin/Heidelberg, Germany, 1997. [Google Scholar]
- Lavrent’ev, M.M.; Romanov, V.G.; Shishatskii, S.P. Ill-Posed Problems of Mathematical Physics and Analysis; American Mathematical Society: Providence, RI, USA, 1986. [Google Scholar]
- Alifanov, O.M. Inverse Heat Transfer Problems; Springer: Berlin, Germany, 2011. [Google Scholar]
- Isakov, V. Inverse Problems for Partial Differential Equations; Springer: New York, NY, USA, 2006; Volume 127. [Google Scholar]
- Samarskii, A.A.; Vabishchevich, P.N. Numerical Methods for Solving Inverse Problems of Mathematical Physics; De Gruyter: Berlin, Germany, 2007. [Google Scholar]
- Sun, N.Z. Inverse Problems in Groundwater Modeling; Springer Science & Business Media: Berlin/ Heidelberg, Germany, 2013; Volume 6. [Google Scholar]
- Tarantola, A. Inverse Problem Theory and Methods for Model Parameter Estimation; SIAM: Philadelphia, PA, USA, 2005. [Google Scholar]
- Aster, R.C.; Borchers, B.; Thurber, C.H. Parameter Estimation and Inverse Problems; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Tikhonov, A.N.; Arsenin, V.Y. Solutions of Ill-Posed Problems; V.H. Winston & Sons: New York, NY, USA, 1977. [Google Scholar]
- Engl, H.W.; Groetsch, C.W. Inverse and Ill-Posed Problems; Elsevier: Amsterdam, The Netherlands, 2014; Volume 4. [Google Scholar]
- Horst, R.; Pardalos, P.M. (Eds.) Handbook of Global Optimization; Springer: Berlin, Germany, 2013. [Google Scholar]
- Nocedal, J.; Wright, S.J. Numerical Optimization, 2nd ed.; Springer Series in Operations Research and Financial Engineering; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Goldberg, D.E. Genetic Algorithms; Pearson Education: Karnataka, India, 2006. [Google Scholar]
- Wei, Y.; Qiqiang, L. Survey on particle swarm optimization algorithm. Eng. Sci. 2004, 5, 87–94. [Google Scholar]
- Sette, S.; Boullart, L. Genetic programming: Principles and applications. Eng. Appl. Artif. Intell. 2001, 14, 727–736. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Marques-Silva, J.P.; Sakallah, K.A. GRASP: A search algorithm for propositional satisfiability. IEEE Trans. Comput. 1999, 48, 506–521. [Google Scholar] [CrossRef] [Green Version]
- Najari, S.; Gróf, G.; Saeidi, S.; Gallucci, F. Modeling and optimization of hydrogenation of CO2: Estimation of kinetic parameters via Artificial Bee Colony (ABC) and Differential Evolution (DE) algorithms. Int. J. Hydrogen Energy 2019, 44, 4630–4649. [Google Scholar] [CrossRef]
- Yang, J.; Lu, L.; Ouyang, W.; Gou, Y.; Chen, Y.; Ma, H.; Guo, J.; Fang, F. Estimation of kinetic parameters of an anaerobic digestion model using particle swarm optimization. Biochem. Eng. J. 2017, 120, 25–32. [Google Scholar] [CrossRef]
- Barbalho, T.J.; Santos, A.C.; Aloise, D.J. Metaheuristics for the Work-Troops Scheduling Problem. 2020. Available online: https://onlinelibrary.wiley.com/doi/abs/10.1111/itor.12925 (accessed on 10 November 2021).
- Liu, Q.; Li, X.; Liu, H.; Guo, Z. Multi-objective metaheuristics for discrete optimization problems: A review of the state-of-the-art. Appl. Soft Comput. 2020, 93, 106382. [Google Scholar] [CrossRef]
- Karimi-Mamaghan, M.; Mohammadi, M.; Meyer, P.; Karimi-Mamaghan, A.M.; Talbi, E.G. Machine learning at the service of meta-heuristics for solving combinatorial optimization problems: A state-of-the-art. Eur. J. Oper. Res. 2022, 296, 393–422. [Google Scholar] [CrossRef]
- Franco-Sepúlveda, G.; Del Rio-Cuervo, J.C.; Pachón-Hernández, M.A. State of the art about metaheuristics and artificial neural networks applied to open pit mining. Resour. Policy 2019, 60, 125–133. [Google Scholar] [CrossRef]
- Mehrabi, M.; Pradhan, B.; Moayedi, H.; Alamri, A. Optimizing an Adaptive Neuro-Fuzzy Inference System for Spatial Prediction of Landslide Susceptibility Using Four State-of-the-art Metaheuristic Techniques. Sensors 2020, 20, 1723. [Google Scholar] [CrossRef] [Green Version]
- Pham, D.; Ghanbarzadeh, A.; Koc, E.; Otri, S.; Rahim, S.; Zaidi, M. The Bees Algorithm; Technical Note; Manufacturing Engineering Centre, Cardiff University: Cardiff, UK, 2005. [Google Scholar]
- Pham, D.T.; Ghanbarzadeh, A.; Koç, E.; Otri, S.; Rahim, S.; Zaidi, M. The bees algorithm—A novel tool for complex optimisation problems. In Intelligent Production Machines and Systems; Elsevier: Amsterdam, The Netherlands, 2006; pp. 454–459. [Google Scholar]
- Pham, D.T.; Castellani, M. The bees algorithm: Modelling foraging behaviour to solve continuous optimization problems. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2009, 223, 2919–2938. [Google Scholar] [CrossRef]
- Pham, D.T.; Castellani, M. Benchmarking and comparison of nature-inspired population-based continuous optimisation algorithms. Soft Comput. 2014, 18, 871–903. [Google Scholar] [CrossRef]
- Pham, D.T.; Castellani, M. A comparative study of the Bees Algorithm as a tool for function optimisation. Cogent Eng. 2015, 2, 1091540. [Google Scholar] [CrossRef]
- Baronti, L.; Castellani, M.; Pham, D.T. An analysis of the search mechanisms of the bees algorithm. Swarm Evol. Comput. 2020, 59, 100746. [Google Scholar] [CrossRef]
- Hussein, W.A.; Sahran, S.; Abdullah, S.N.H.S. The variants of the Bees Algorithm (BA): A survey. Artif. Intell. Rev. 2017, 47, 67–121. [Google Scholar] [CrossRef]
- Karaboga, D.; Akay, B. An Artificial Bee Colony (ABC) Algorithm on Training Artificial Neural Networks; Technical Report TR06; Erciyes University, Engineering Faculty, Computer Engineering Department: Kayseri, Turkey, 2005. [Google Scholar]
- Karaboga, D.; Basturk, B. On the performance of artificial bee colony (ABC) algorithm. Appl. Soft Comput. 2008, 8, 687–697. [Google Scholar] [CrossRef]
- Karaboga, D.; Akay, B. A comparative study of artificial bee colony algorithm. Appl. Math. Comput. 2009, 214, 108–132. [Google Scholar] [CrossRef]
- Kralchevsky, P.A.; Danov, K.D.; Denkov, N.D. Handbook of Surface and Colloid Chemistry; Chapter Chemical Physics of Colloid Systems and Interfaces; Taylor & Francis Group, LLC: Abingdon, UK, 2009; pp. 197–377. [Google Scholar]
- Grigoriev, V.V.; Iliev, O.; Vabishchevich, P.N. Computational identification of adsorption and desorption parameters for pore scale transport in periodic porous media. J. Comput. Appl. Math. 2019, 370, 112661. [Google Scholar] [CrossRef]
- Grigoriev, V.V.; Vabishchevich, P.N. Bayesian Estimation of Adsorption and Desorption Parameters for Pore Scale Transport. Mathematics 2021, 9, 1974. [Google Scholar] [CrossRef]
- Acheson, D.J. Elementary Fluid Dynamics; Clarendon Press: Oxford, UK, 2005. [Google Scholar]
- Churbanov, A.G.; Iliev, O.; Strizhov, V.F.; Vabishchevich, P.N. Numerical simulation of oxidation processes in a cross-flow around tube bundles. Appl. Math. Model. 2018, 59, 251–271. [Google Scholar] [CrossRef] [Green Version]
- Gresho, P.M.; Sani, R.L. Incompressible Flow and the Finite Element Method, Volume 2, Isothermal Laminar Flow; Wiley: New York, NY, USA, 2000. [Google Scholar]
- Geuzaine, C.; Remacle, J.F. Gmsh: A three-dimensional finite element mesh generator with built-in pre- and post-processing facilities. Int. J. Numer. Methods Eng. 2009, 79, 1309–1331. [Google Scholar] [CrossRef]
- Taylor, C.; Hood, P. A numerical solution of the Navier-Stokes equations using the finite element technique. Comput. Fluids 1973, 1, 73–100. [Google Scholar] [CrossRef]
- Logg, A.; Mardal, K.A.; Wells, G.N. Automated Solution of Differential Equations by the Finite Element Method; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar] [CrossRef]
- Alnæs, M.S.; Blechta, J.; Hake, J.; Johansson, A.; Kehlet, B.; Logg, A.; Richardson, C.; Ring, J.; Rognes, M.E.; Wells, G.N. The FEniCS Project Version 1.5. Arch. Numer. Softw. 2015, 3, 9–23. [Google Scholar] [CrossRef]
- Shekel, J. Test functions for multimodal search techniques. In Proceedings of the Fifth Annual Princeton Conf. on Information Science and Systems, Princeton, NJ, USA, 25–26 March 1971. [Google Scholar]
- Rosenbrock, H. An automatic method for finding the greatest or least value of a function. Comput. J. 1960, 3, 175–184. [Google Scholar] [CrossRef] [Green Version]
- Himmelblau, D.M. Applied Nonlinear Programming; McGraw-Hill: New York, NY, USA, 1972. [Google Scholar]
- Rastrigin, L. Extremal Control Systems. Cybernetics Series; Theoretical Foundations of Engineering: Nauka, Russian, 1974; Volume 3. [Google Scholar]
- Rudolph, G. Globale Optimierung Mit Parallelen Evolutionsstrategien. Ph.D. Thesis, Universit at Dortmund, Fachbereich Informatik, Dortmund, Germany, 1990. [Google Scholar]
- Hoffmeister, F.; Bäck, T. Genetic algorithms and evolution strategies: Similarities and differences. In International Conference on Parallel Problem Solving from Nature; Springer: Berlin/Heidelberg, Germany, 1990; pp. 455–469. [Google Scholar]
- Mühlenbein, H.; Schomisch, M.; Born, J. The parallel genetic algorithm as function optimizer. Parallel Comput. 1991, 17, 619–632. [Google Scholar] [CrossRef]
- Song, X.; Zhao, M.; Yan, Q.; Xing, S. A high-efficiency adaptive artificial bee colony algorithm using two strategies for continuous optimization. Swarm Evol. Comput. 2019, 50, 100549. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Formulae | Range |
|---|---|---|
| Shekel | ||
| Rosenbrock | ||
| Himmelblau | ||
| Rastrigin |
| Function | Minimum | Program Output | Iterations | NFE |
|---|---|---|---|---|
| Shekel | F(2,10) = −1.014 F(10,15) = −0.517 F(18,4) = −0.509 | F(2.012, 10.005) = −1.014 F(9.991, 14.998) = −0.516 F(18.003, 4.008) = −0.509 | 93 | 1260 |
| Rosenbrock | F(1,1) = 0 | F(1.004, 1.009) = 9.134 × 10 | 138 | 1630 |
| Himmelblau | F(3.584, −1.848) = 0 F(−2.805, 3.131) = 0 F(−3.779, −3.283) = 0 F(3, 2) = 0 | F(3.579, −1.856) = 0.003 F(−2.804, 3.131) = 1.356 × 10 F(−3.777, −3.271) = 0.005 F(3.005, 2) = 0.001 | 113 | 1650 |
| Rastrigin | F(0,0) = 0 | F(−0.002, −0.005) = 0.005 | 96 | 1470 |
| Function | Minimum | Program Output | Iterations | NFE |
|---|---|---|---|---|
| Shekel | F(2,10) = −1.014 F(10,15) = −0.517 F(18,4) = −0.509 | F(1.99, 10.014) = −1.014 | 24 | 4704 |
| Rosenbrock | F(1,1) = 0 | F(0.979, 0.962) = 9.474 × 10 | 53 | 8010 |
| Himmelblau | F(3.584, −1.848) = 0 F(−2.805, 3.131) = 0 F(−3.779, −3.283) = 0 F(3, 2) = 0 | F(−2.805, 3.132) = 5.681 × 10 | 38 | 2964 |
| Rastrigin | F(0,0) = 0 | F(9.251, 7.722 × 10) = 1.183 × 10 | 183 | 14,274 |
| Function | Minimum | Program Output | Iterations | NFE |
|---|---|---|---|---|
| Shekel | F(2,10) = −1.014 F(10,15) = −0.517 F(18,4) = −0.509 | F(2.004, 10.018) = −1.014 | 215 | 4343 |
| Rosenbrock | F(1,1) = 0 | F(0.97, 0.94) = 9.039 × 10 | 1106 | 22,411 |
| Himmelblau | F(3.584, −1.848) = 0 F(−2.805, 3.131) = 0 F(−3.779, −3.283) = 0 F(3, 2) = 0 | F(−2.803, 3.132) = 1.43 × 10 | 83 | 853 |
| Rastrigin | F(0,0) = 0 | F(−1.925 × 10, −4.321 × 10) = 3.712 × 10 | 161 | 1645 |
| Standard Bees Algorithm | Artificial Bee Colony | Modified Bee Colony | ||||
|---|---|---|---|---|---|---|
| Function | Success | NFE (Mean) | Success | NFE (Mean) | Success | NFE (Mean) |
| Shekel | 100% | 3646 | 100% | 2582 | 100% | 502 |
| Rosenbrock | 100% | 3850 | 100% | 40,496 | 100% | 2351 |
| Himmelblau | 100% | 4352 | 100% | 1431 | 100% | 2007 |
| Rastrigin | 100% | 11,220 | 100% | 2806 | 48% | 4274 |
| Function | ||||||||
|---|---|---|---|---|---|---|---|---|
| Shekel | 1 | 2 | {1, 1} | 5 | 50 | 20 | 10 | 5 |
| Rosenbrock | 1 | 2 | {0.4, 0.4} | 4 | 50 | 20 | 10 | 5 |
| Himmelblau | 1 | 2 | {0.4, 0.4} | 4 | 50 | 20 | 10 | 5 |
| Rastrigin | 1 | 2 | {0.2, 0.2} | 1 | 50 | 20 | 10 | 5 |
| Function | SN | D | Limit |
|---|---|---|---|
| Shekel | 10 | 2 | 20 |
| Rosenbrock | 10 | 2 | 20 |
| Himmelblau | 10 | 2 | 20 |
| Rastrigin | 10 | 2 | 20 |
| Function | n | m | d | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Shekel | 1 | 2 | {1, 1} | 5 | 150 | 20 | 10 | 5 | ||
| Rosenbrock | 1 | 2 | {0.4, 0.4} | 4 | 150 | 20 | 10 | 5 | ||
| Himmelblau | 4 | 0 | {0.4, 0.4} | 4 | 250 | 20 | 10 | 5 | ||
| Rastrigin | 1 | 0 | {1, 1} | 1 | 500 | 20 | 10 | 5 |
| Parameter Set I | |||
|---|---|---|---|
| Program output | Error (%) | Iterations | NFE |
| J(84.554, 0.845, 995.593) = 0.002 | 0.016 | 94 | 2230 |
| J(112.266, 1.126, 1029.347) = 0.031 | 0.056 | ||
| J(100.455, 1.001, 964.319) = 0.0477 | 0.08 | ||
| J(116.173, 1.17, 1078.88) = 0.085 | 0.15 | ||
| J(91.394, 0.928, 1200.789) = 0.213 | 0.374 | ||
| Parameter Set II | |||
| Program output | Error (%) | Iterations | NFE |
| J(92.794, 0.928, 997.607) = 1.29 | 0.002 | 281 | 12,300 |
| J(83.358, 0.833, 994.812) = 3.01 | 0.003 | ||
| J(101.655, 1.017, 1000.054) = 4.2 | 0.007 | ||
| J(136.404, 1.367, 1011.473) = 5.7 | 0.01 | ||
| J(117.636, 1.178, 1014.271) = 0.011 | 0.02 | ||
| Program Output | Error (%) | Iterations | NFE |
|---|---|---|---|
| J(126.11, 1.287, 1151.449) = 0.362 | 0.626 | 16 | 205 |
| J(104.861, 1.038, 991.051) = 0.405 | 0.7 | ||
| J(117.213, 1.146, 927.115) = 0.654 | 1.133 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grigoriev, V.V.; Iliev, O.; Vabishchevich, P.N. On Parameter Identification for Reaction-Dominated Pore-Scale Reactive Transport Using Modified Bee Colony Algorithm. Algorithms 2022, 15, 15. https://doi.org/10.3390/a15010015
Grigoriev VV, Iliev O, Vabishchevich PN. On Parameter Identification for Reaction-Dominated Pore-Scale Reactive Transport Using Modified Bee Colony Algorithm. Algorithms. 2022; 15(1):15. https://doi.org/10.3390/a15010015
Chicago/Turabian StyleGrigoriev, Vasiliy V., Oleg Iliev, and Petr N. Vabishchevich. 2022. "On Parameter Identification for Reaction-Dominated Pore-Scale Reactive Transport Using Modified Bee Colony Algorithm" Algorithms 15, no. 1: 15. https://doi.org/10.3390/a15010015
APA StyleGrigoriev, V. V., Iliev, O., & Vabishchevich, P. N. (2022). On Parameter Identification for Reaction-Dominated Pore-Scale Reactive Transport Using Modified Bee Colony Algorithm. Algorithms, 15(1), 15. https://doi.org/10.3390/a15010015