1. Introduction
LMIs provide powerful tools for the design of guaranteed stabilizing controllers for exactly known (nominal) system models as well as for scenarios with bounded uncertainty in selected parameters. In both cases, the basic idea of using LMIs for control design (as well as for the dual task of state estimation) is the proof of asymptotic stability of the closed-loop dynamics by means of a suitable Lyapunov function candidate. Then, this stability proof can be included directly in the stabilizing control synthesis. The most important options for a control synthesis with the help of LMIs are the solution of a so-called pure feasibility problem (i.e., a controller guaranteeing asymptotic stability and, in the cases of bounded parameter uncertainty, achieving input-to-state stability) or extensions which deal with optimization problems (such as
and
). Furthermore, regions for the closed-loop eigenvalues can be specified so that minimum and maximum state variation rates during transient phases can be influenced systematically. Numerous references, such as [
1,
2,
3,
4,
5,
6,
7], provide further information concerning techniques for an LMI-based control synthesis.
For linear system models with uncertain, bounded parameters, parameter-independent Lyapunov function candidates can be used in many application scenarios. The resulting LMIs need to be specified for suitably chosen extremal system realizations of a polytopic uncertainty representation. Thereby, not only stability can be ensured but also restrictions on admissible eigenvalue domains (referred to as
-stability in [
8]) can be guaranteed if the design task is solved successfully [
5,
6]. If the assumption of a parameter-independent Lyapunov function leads to an unacceptably high level of conservativeness, augmented LMI representations can be introduced, which are based on parameter-dependent techniques (cf. [
2,
3]). Besides pure parameter uncertainty, which reflects inevitable tolerances such as imprecisely known masses in mechanical systems, quasi-linear system models can also be handled with these techniques. In such cases, polytopic uncertainty representations are required that are composed of state-dependent system and input matrices, which are bounded by their element-wise defined worst-case realizations. In such a way, LMI techniques can also be employed for the design of robust controllers for nonlinear process models [
9].
The statements above hold equally for the design of state observers with a Luenberger-like structure. Corresponding design criteria have been derived by exploiting the duality to control synthesis in [
10]. However, the interconnection of independently designed controllers and state observers, where both of them need to be robust against bounded parameter uncertainty, is not ensured to be asymptotically stable. This issue is visualized in
Section 2 with an academic example. As a consequence, it is inevitable to design controllers and observers simultaneously. For example, this problem is treated in [
11,
12,
13] for discrete-time systems. The simultaneous controller and observer design leads to nonlinear matrix inequalities that can be solved in an iterative way.
Moreover, most practical systems are subject to stochastic disturbances in the forms of actuator, process, and sensor noise. These systems can be controlled by an optimal observer-based LQG technique if the system model is linear and specified by precisely known, that is, point-valued system matrices. The LQG technique combines a linear quadratic regulator design with the optimal Gaussian (i.e., Kalman filter-based) state estimation. As summarized, for example, by Skelton in [
7], the problem of control parameterizations that make sure that the noise-induced output and input covariances (i.e., uncertainty on the closed-loop system outputs and actuator signals) fall below specific threshold values, can be cast into LMIs.
If the techniques for an optimal LMI-based observer parameterization of continuous-time systems, published in [
14], are used, the domains around the system’s equilibrium states can be identified for which no contractivity, that is, stability in a stochastic sense, can be verified. To perform the analysis, the Itô differential operator [
15] was applied to a Lyapunov function candidate to perform its temporal differentiation in the corresponding stochastic setting. In addition, we introduced an LMI-based numerical optimization of the observer gains in [
14] to minimize the domains for which the contractivity of the observer’s error dynamics cannot be proven by the technique above.
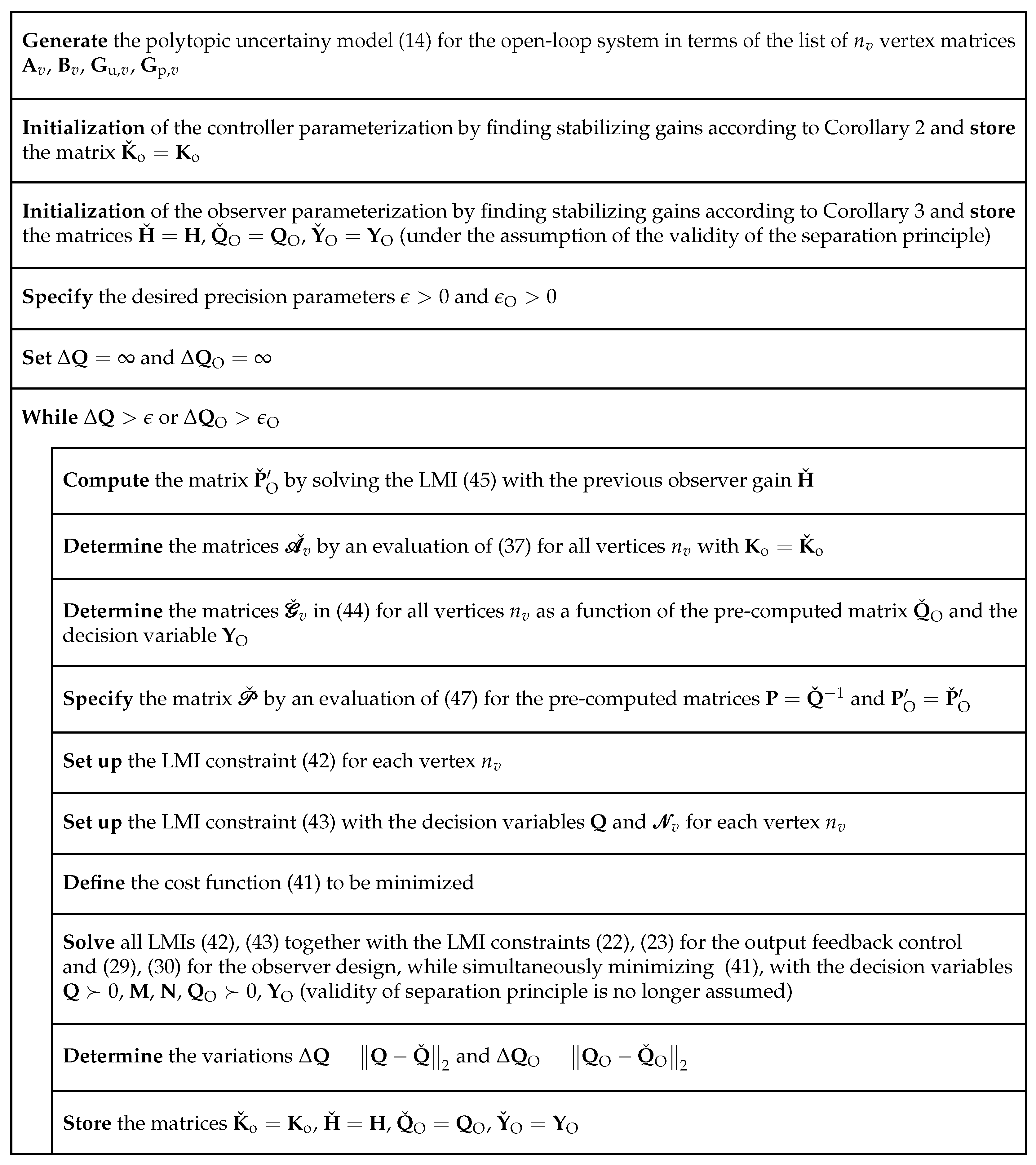
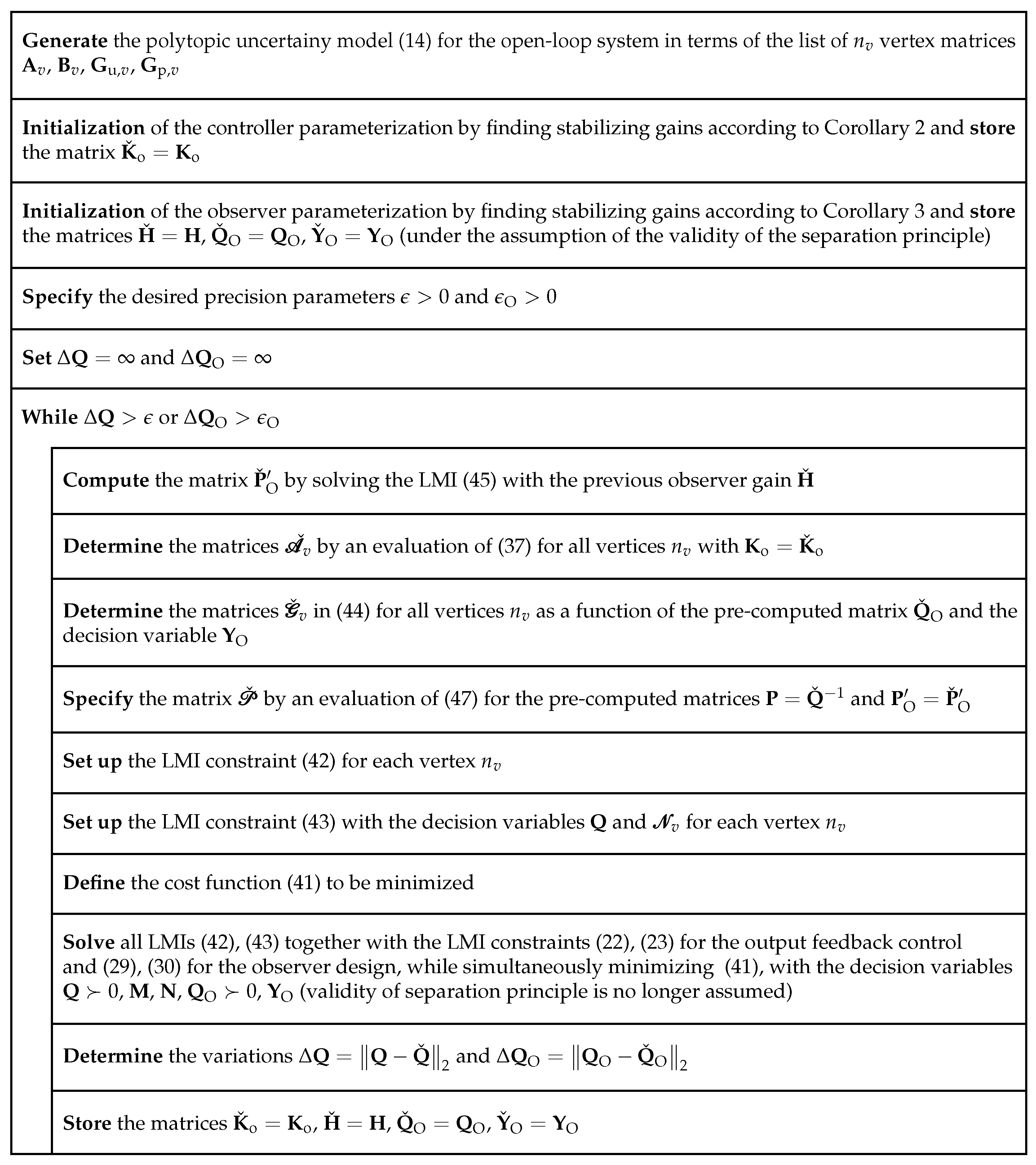
This paper proposes a novel iterative solution that (i) solves the nonlinear matrix inequalities for a combined control and observer design of linear continuous-time processes with polytopic parameter uncertainty in an iterative manner and (ii) generalizes the procedures from [
14] to optimize the controller and observer gains so that the sensitivity against actuator, process, and sensor noise on the closed-loop trajectories and the observer’s error dynamics is minimized by means of the simultaneous control and observer design. Besides the design of observer-based full state feedback controllers, our approach is also capable of designing output feedback control laws, where the measured outputs and fed-back quantities do not necessarily have to coincide. Due to the inclusion of the state observer in the design procedure, the proposed approach is more general than the robust output feedback design that was proposed by Gershon and Shaked in [
16] for discrete-time systems.
Finally, the work of Do et al. in [
17] should be mentioned. There, a combined control and observer design was performed. However, the authors do not aim at directly minimizing the domain for which stability in a stochastic sense cannot be proven. Instead, they aim to achieve the stability of the overall closed-loop control structure by suppressing the influence of disturbances by means of a frequency response shaping approach.
This paper is structured as follows. After a short introductory example in
Section 2,
Section 3 reviews our results published in [
14] to turn them into a novel iterative LMI approach for an optimized, guaranteed stabilizing combined control and observer synthesis in
Section 4. The efficiency of this approach is demonstrated in
Section 5 in numerical simulations for the stabilization of the Zeeman catastrophe machine [
18]. The stabilization is performed along the curve of input-dependent unstable equilibria. In addition, a representative tracking control task is presented, in which the feedforward control signal is determined by a P-type iterative learning control approach [
19,
20]. Finally, conclusions and an outlook on future work are provided in
Section 6.
2. Observer-Based Control of Systems with Polytopic Uncertainty: A Cautionary Tale
As an introductory warning example, consider the unstable linear plant
with the interval parameter
. It is desired to parameterize a linear feedback controller
, where
is a filtered state estimate resulting from the observer
Here, represents the measured plant output and is a fixed point-valued parameter taken from the interval .
Remark 1. Because this example should purely visualize the loss of validity of the classical separation principle of control and observer synthesis due to the bounded uncertainty of the parameter , stochastic process and sensor noise are not considered in this section. Noise will be accounted for systematically in Section 3 and Section 4. A classical control synthesis for the system model (
1) would assume that
holds. Then, the closed-loop dynamics result in
which become asymptotically stable if the controller gain
k is chosen so that
holds.
Similarly, the observer error dynamics with
would classically be stated as
under the assumption of an identical parameter
a in both the plant and observer model, where
would ensure stability.
When considering that
in the observer differential Equation (
2) is some point value taken from the interval
, the resulting combined system dynamics turn into
for which the control and observer gains
k and
h need to be chosen so that all eigenvalues of
are guaranteed to lie strictly within the open left complex half-plane for all possible realizations of
.
Due to the simple structure of the scalar system model with a single uncertain parameter, the optimal choice (with respect to maximizing the admissible domains for the gains
k and
h) is obvious; it would be
. However, in more general settings, such simple statements are typically not possible. At least for systems with a small number of uncertain parameters, as well as controller and observer gains, the choice could be assisted analytically by the parameter space approach from [
8].
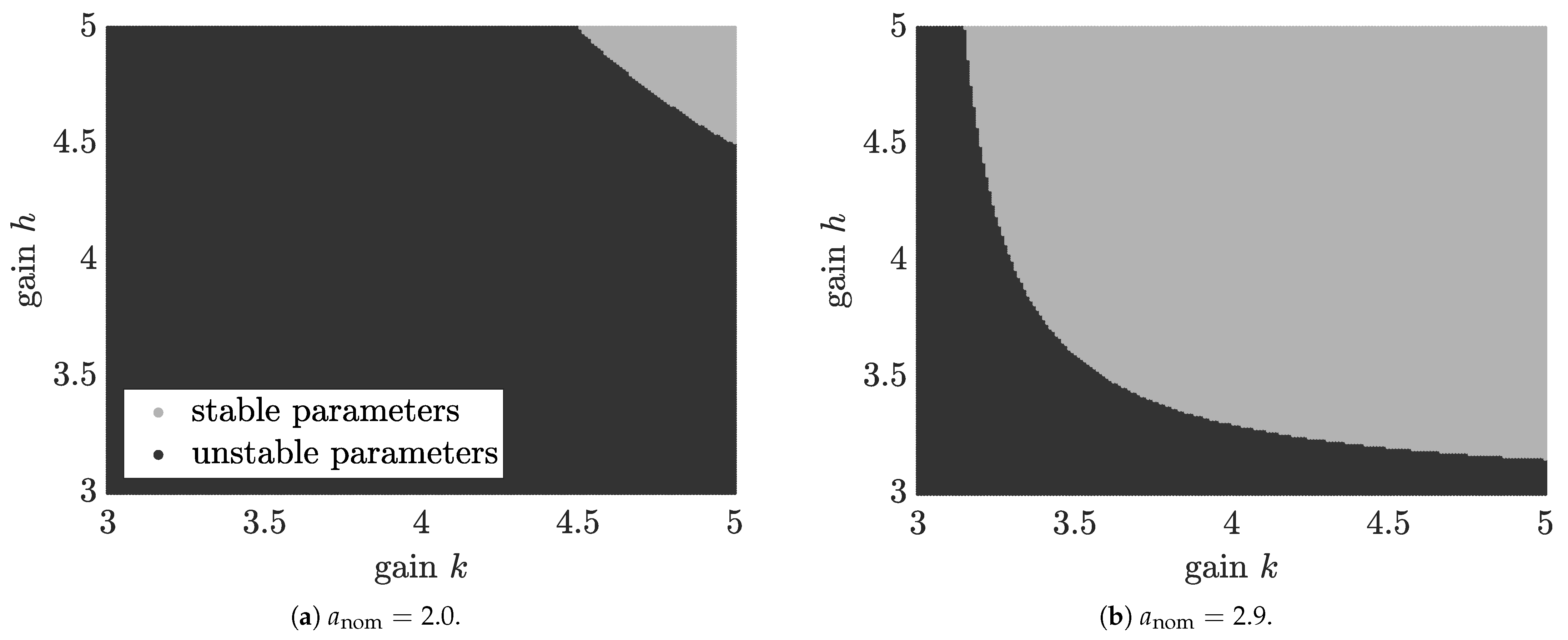
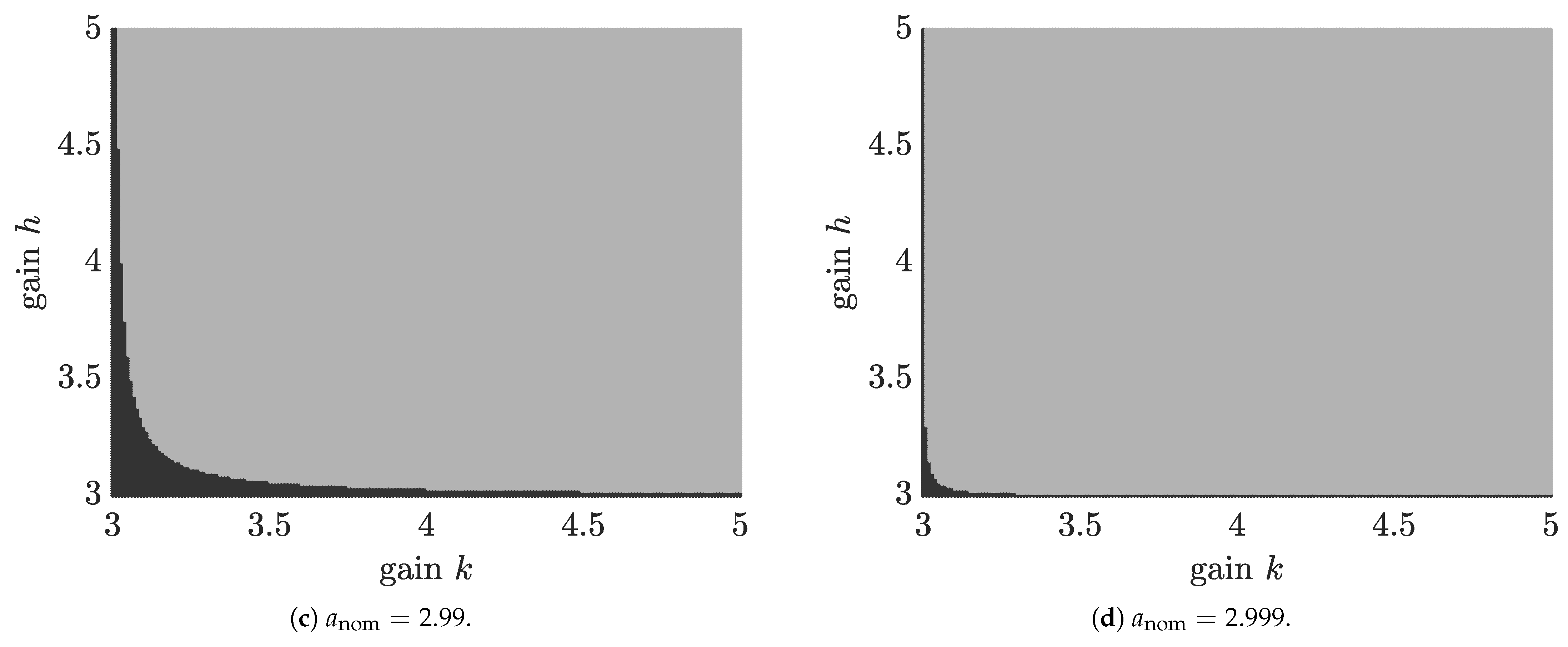
For more complex models, only numerical techniques are helpful for determining the admissible domains of stabilizing controller and observer gains
k and
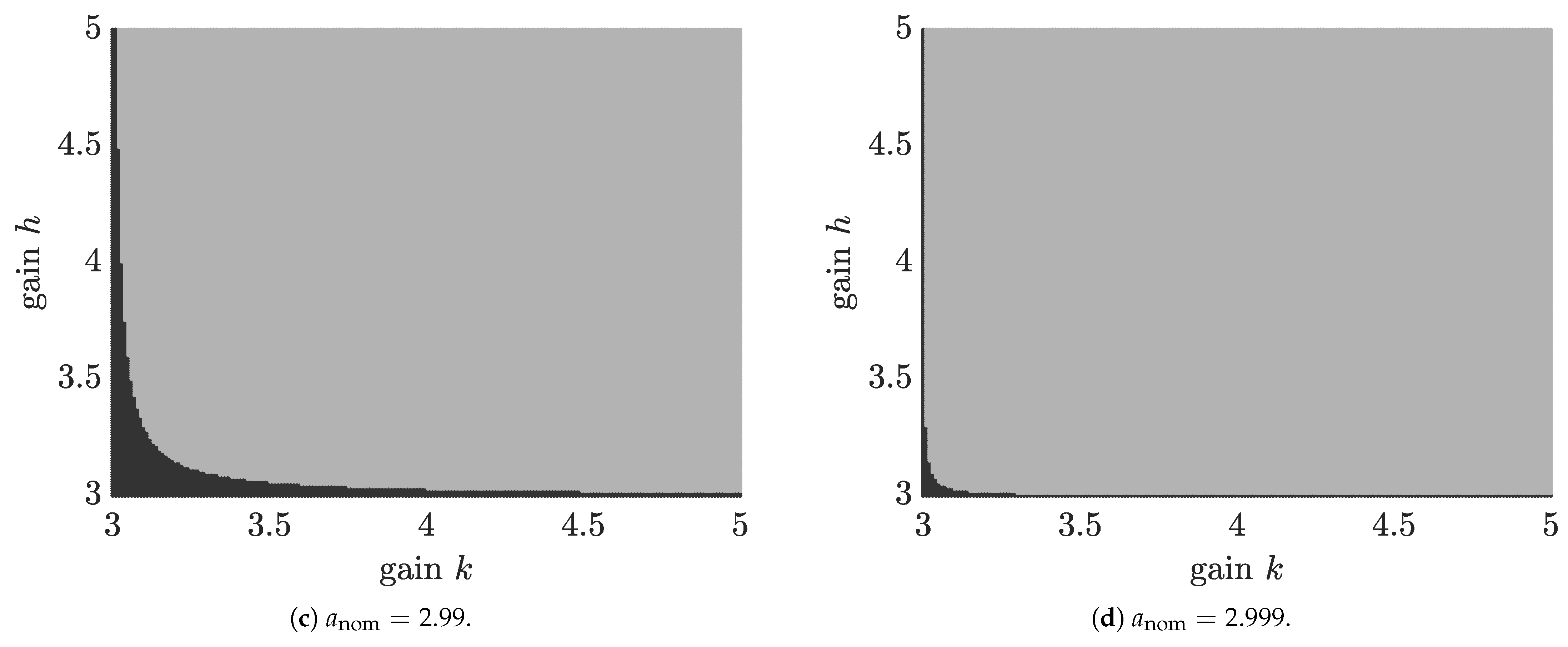
h, respectively. For the academic example in this section, a numerical analysis of the stability domains is shown in
Figure 1. Domains of robustly stabilizing gains are highlighted in a light gray color, while gains with unstable eigenvalues for at least one
are highlighted in dark gray. Clearly, setting
to a value that is significantly smaller than
(e.g., to the interval midpoint
in
Figure 1a) requires much larger gains for
k and
h than the settings in
Figure 1b–d. The loss of the validity of the separation principle of control and observer design can be seen clearly from the fact that the boundary between stable and unstable realizations is a curved line that is not parallel to the coordinate axes
k and
h in
Figure 1. The separation principle would only hold in cases where the stability boundaries for
k and
h are fully decoupled.
The iterative LMI-based solution procedure given in the following sections provides a systematic approach for stabilizing the observer-based closed-loop control system when the point-valued parameterization of the parallel model in the observer (the parameter
in (Equation (
2))) is fixed. In addition to purely finding the stabilizing controller and observer gains, the proposed technique optimizes the gains so that the resulting dynamics become as insensitive as possible against stochastic actuator, process, and sensor noise. An optimization of the point-valued parameters of the parallel model included in the state observer can be considered a subject for future work.
3. Methodological Background: LMI-Based Control and Observer Design
In this paper, dynamic system models are considered, which are given by the stochastic differential equations
with the state vector
and the input vector
;
and
are the system and input matrices, where
is a vector of either constant or time-varying bounded parameters. Alternatively, this vector may denote the dependence of all system matrices on the state variables
, cf. [
9]. For the sake of a compact notation, all entries of
are treated as mutually independent with an affine dependence of
and
on these quantities. Moreover,
and
are stochastically independent standard normally distributed Brownian motions of actuator and process noise. In this sense,
and
represent the (element-wise non-negative) disturbance input matrices containing the corresponding standard deviations.
The measured system output is given by
where the output matrix
is assumed to be exactly known;
is the standard normally distributed sensor noise, while
is the weighting matrix representing the actual standard deviation of the output disturbance.
In the following, we aim at designing either an observer-based state feedback (Case 1) or an observer-based output feedback control strategy (Case 2). In the second case, the measured output does not necessarily coincide with the system output to be controlled. A linear filter-based output feedback (Case 3), in which the filter is designed in a model-free manner, is only mentioned for the sake of completeness and has been treated by the authors in a separate publication [
21]. The reason for this separate investigation is the fact that the design criteria do not fully coincide with the requirements derived for the Cases 1 and 2 in this paper:
- Case 1:
The control signal is defined as
where (without loss of generality)
is a constant feedforward signal and
is the state estimate determined by the robust observer
which makes use of the nominal system and input matrices
and
, see
Section 3.4. For the following stabilization and performance optimization,
is assumed. Desired operating points outside the origin
are easily achievable by adding suitable nonzero offset terms.
- Case 2:
The control signal is defined as
with the same observer as in (
11). Note that the output matrix
does not necessarily coincide with the matrix
defined in (
9).
- Case 3:
The control signal is defined as
where
is a vector consisting of filtered system outputs and estimated output derivatives, cf. [
21].
Remark 2. Case 3 can be interpreted as a dynamic output feedback control approach, whereas the Cases 1 and 2 are model-based approaches employing feedback controllers that rely on an estimation of the complete state vector by an appropriate full observer. It should be noted that the different control structure of Case 3 leads to a similar, however not identical, LMI approach. Therefore, Case 3 is treated separately in [21]. Moreover, as already discussed in [21], Case 3 should typically only be used if a maximum of two time derivatives of measured output signals are estimated with the model-free filter. In all other cases, the observer-based concepts of Cases 1 and 2 are advantageous. To guarantee solvability of the control design task in all three cases above, it is assumed that the system (
8) is stabilizable using either of the system inputs (
10), (
12), or (
13), and that the pair
is robustly observable (or at least detectable) in Case 1 as well as in Case 2. Here, robust observability is defined as observability of all possible values of the parameters
according to the definition given in [
8]. Note that the requirements of both stabilizability and detectability will not be proven explicitly. These properties are instead verified constructively by determining a solution that ensures input-to-state stability of the system dynamics as well as of the observer’s error dynamics.
3.1. Polytopic Uncertainty Modeling
As shown in [
4,
6,
22], it is possible to describe the influence of uncertainty in many practical applications by bounded uncertainty domains
of polytope type. There, it is assumed that all system matrices in (
8) belong to a convex combination of extremal vertex matrices in the form
where
denotes the number of independent extremal realizations for the union of all four matrices included in (
14).
3.2. Robust State Feedback Control
In all following subsections, sufficient conditions for asymptotic stability of the closed-loop system dynamics (and the observers’ error dynamics, respectively) are derived on the basis of quadratic, parameter-independent, radially unbounded Lyapunov function candidates
with the positive definite matrix
as a free decision variable to be determined during the proposed iterative solution of matrix inequalities.
Theorem 1 ([
4,
6] Sufficient stability condition for full state feedback)
. Robust asymptotic stability of the closed-loop control system according to Case 1 for a noise- and error-free state feedback (i.e., ) is ensured if the gain matrix satisfies the bilinear matrix inequalities, for all polytope vertices in (14). Proof. Substituting the control law (
10) with
in the deterministic part of the system model (
8), computing the time derivative of the Lyapunov function candidate (
15), and representing the system matrices
and
by the polytopic uncertainty model (
14) leads to
A sufficient stability condition is guaranteed to be satisfied in terms of
for all
if all matrix inequalities (
17) hold true for a parameter-independent controller gain
. □
Corollary 1. To allow for an efficient solution of the bilinear matrix inequalities in Theorem 1 with the help of standard solvers for LMIs such asSeDuMi[23] in combination withYALMIP[24], the linearizing change of variablesis introduced. Multiplying (17) from the left and right with the matrix leads to equivalent LMIswith . Their solution with then needs to be transformed back by means of (19). 3.3. Robust Output Feedback Control
Theorem 2 (Sufficient stability condition for output feedback control)
. Robust asymptotic stability of the closed-loop control system according to Case 2 for an error-free output feedback (i.e., ) is ensured if the gain matrix satisfies the bilinear matrix inequalities, for all polytope vertices in (14). Proof. The proof of Theorem 2 is a direct consequence of the sufficient stability condition used for the proof of Theorem 1. □
Corollary 2 ([
25])
. For precisely known matrices , an LMI formulation of Theorem 2 is obtained by introducing a linearizing change of variables with and the equality constraintsMultiplying (21) from the left and right by and considering the relations (22) yields the LMIs If the matrix , and therefore also , have full row rank, the resulting controller gain is given by Remark 3. In the literature [10,25], an alternative problem formulation is often given in terms ofwith and the additional equality constraintleading to . Applying this formulation is, however, only useful for precisely known matrices , where instead may be subject to a polytopic uncertainty model. Remark 4. Theorems 1 and 2 become identical for the case of a full state feedback, namely, for . Then, the constraint becomes redundant as .
3.4. Robust State Observation
Following the duality principle between control and observer synthesis, as described for example in [
10,
26], leads to the counterparts of Theorem 1 and Corollary 1 according to the following Theorem 3, where the observer differential equation is given by Equation (
11).
Theorem 3 ([
10] Sufficient stability condition for robust state observer)
. The error dynamics of a robust state observer according to Equation (11) with the exactly known output matrix are robustly asymptotically stable if the observer gain satisfies the bilinear matrix inequalitiesfor some positive definite matrix at all polytope vertices in (14). As stated before, the matrix
in (
27) does not necessarily have to be identical to the matrix
to be fed back in the control law (
12). Note that the prime symbol
in (
27) has been introduced to indicate that the matrix
is typically not the same as
in the following corollary.
Corollary 3 ([
10])
. To allow for an efficient solution of the bilinear matrix inequalities in Theorem 3, after considering the duality between control and observer synthesis by evaluating the transposed of (27) according tothe linearizing change of variablesis introduced. Multiplying (27) from the left and right with the matrix leads to equivalent LMIsfor all polytope vertices in (14). 5. Simulation Results
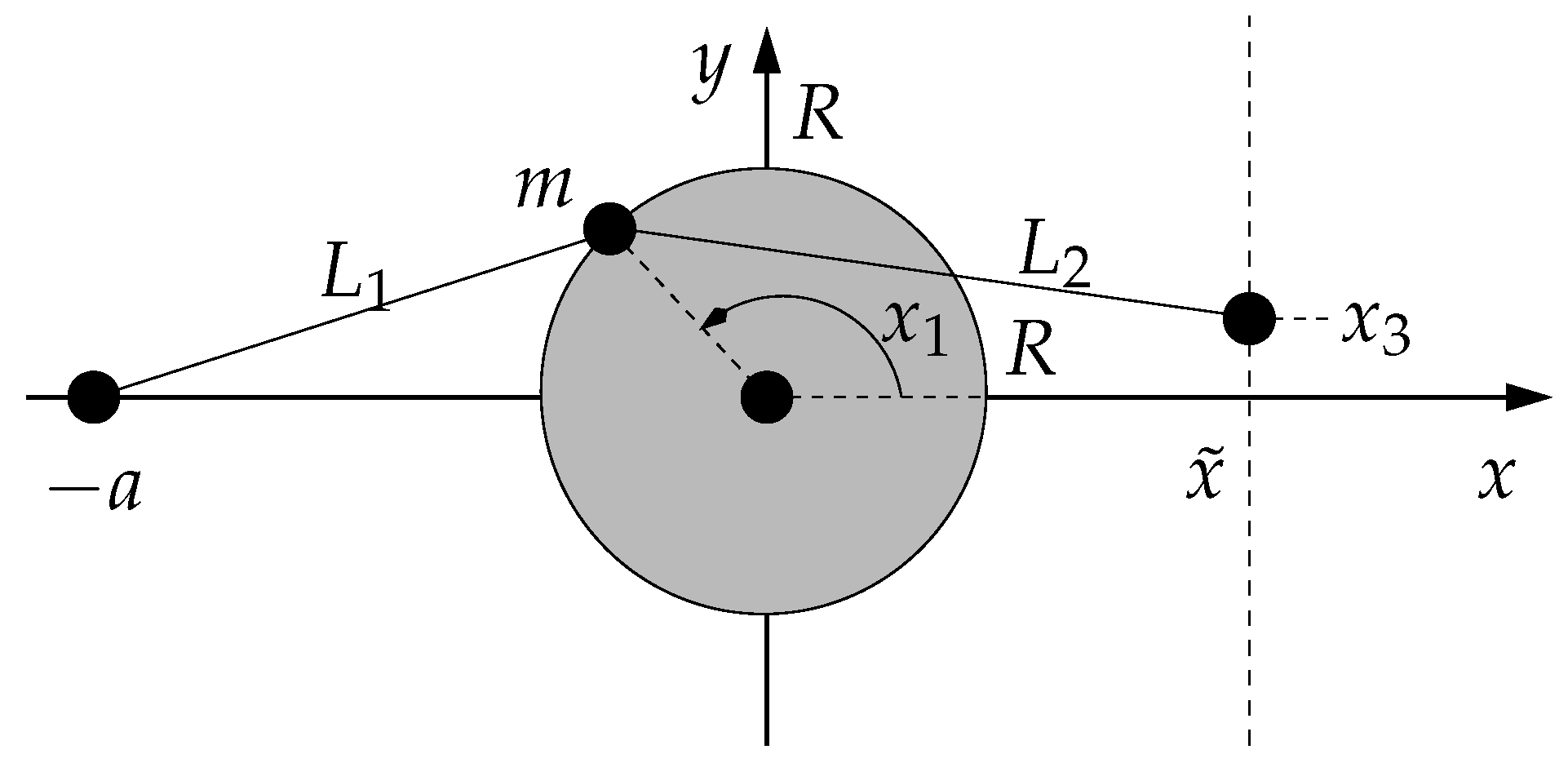
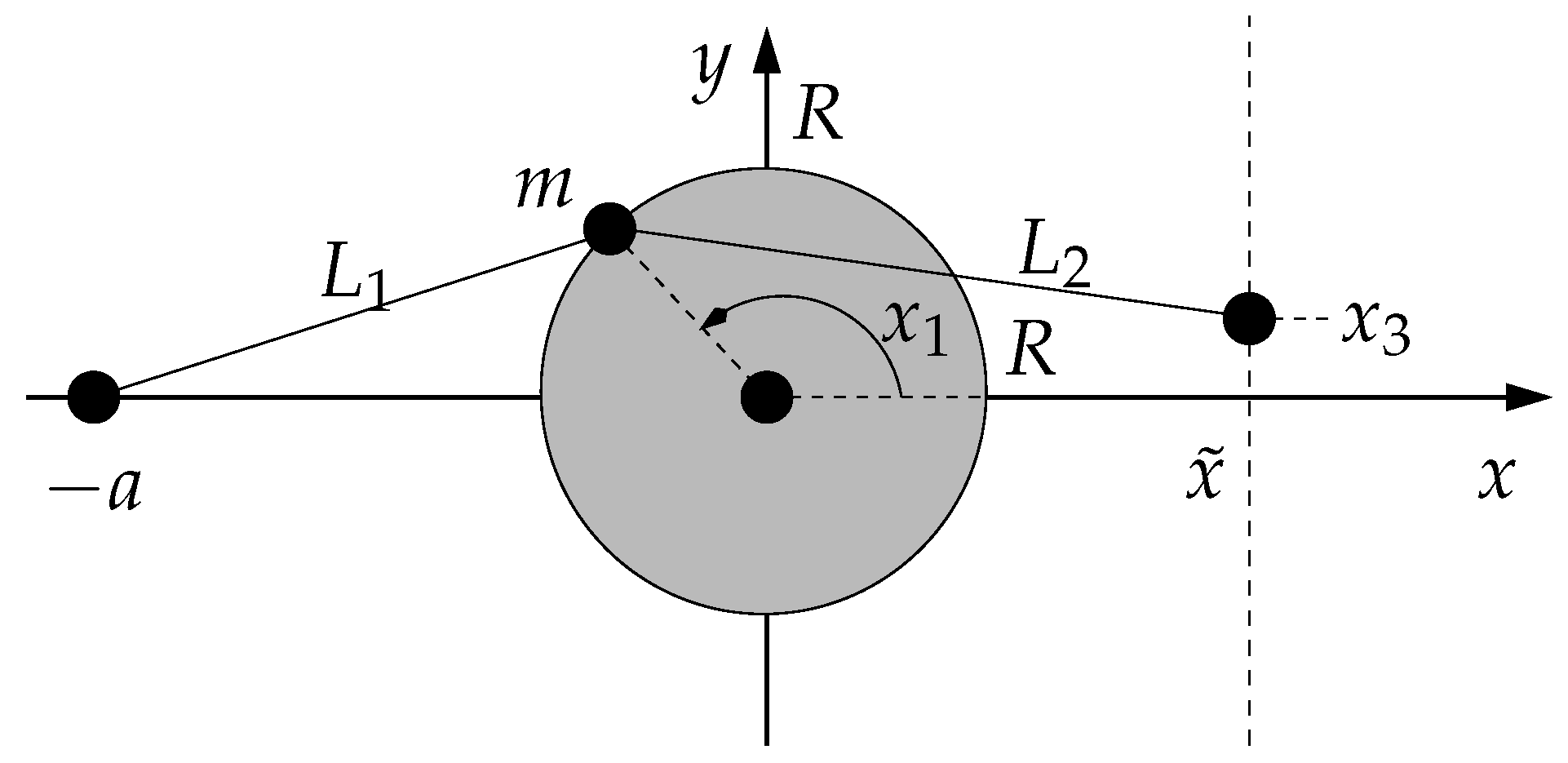
As a benchmark for the proposed control design, we consider the Zeeman catastrophe machine illustrated in
Figure 3. It consists of a disc of radius
R that can rotate freely around its center at the origin of the
-plane. The angle of orientation
(with corresponding velocity
) can be manipulated by using the position
as a control input. This position is assumed to be controlled by an actuator with a non-negligible time constant
T, where
u denotes the control signal in terms of the desired value for
.
5.1. Modeling
Depending on the location
, which is assumed to be fixed, this simple mechanical setup with the connecting elements of the variable lengths
and
, which are given by linear springs with stiffness
k, can show nonlinear behavior including hysteresis and chaotic motion [
18]. Both springs have the nominal length
.
The first goal of designing a partial state feedback controller (using only the measurable angle and its derivative , where both are smoothened and estimated by a state observer) is to realize a stable transition between two bifurcation points at which the open-loop dynamics change between asymptotic stability and instability (represented by a jump-like motion between two significantly different angles). Second, a tracking controller is designed, which allows for following a reference trajectory for the angle .
According to the discussion above, the controller is parameterized with the output matrix
while
represents the sensor’s relation to the state vector.
The equations of motion of this system
with the velocity–proportional damping term
and the state-dependent spring lengths
and
can be derived on the basis of Lagrange’s equations of second kind. For this derivation, it is assumed that the total mass
m of the system is located at a single point on the edge of the rotating disc.
For the LMI-based design procedure, the system model is re-written into the quasi-linear form
of a polytopic uncertainty system model with
and
, where
and
These intervals have been determined for the parameters
,
,
,
,
,
,
,
and the worst-case operating domains
and
All of these parameters and state variables are assumed to be given in terms of corresponding SI units.
Remark 6. In the following simulations, the nonlinear model is used to represent the controlled plant and observer. The observer gain is designed according to Section 4 with a point-valued system matrix given by the nominal values of the quasi-linear form. Note that this is only one solution of the parameter-dependent observer matrix . This simplification is possible under the assumption that both tracking and state estimation errors are small. In general, however, the stability of the nonlinear observer can be proven by checking the stability of all combinations of the vertex matrices of the controlled plant to each extremal system matrix of the observer. 5.2. Tracking the Unstable Branch of the Bifurcation Diagram
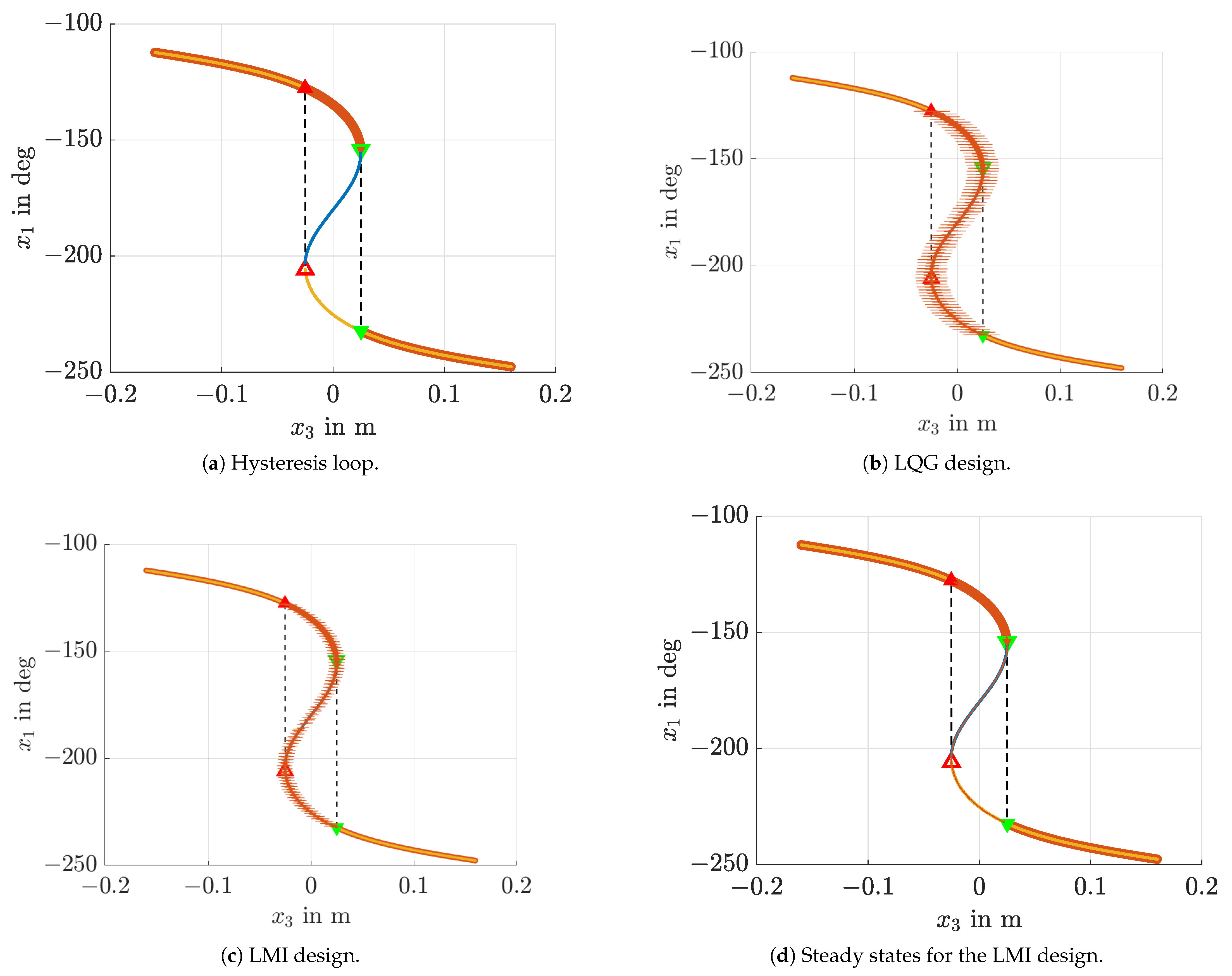
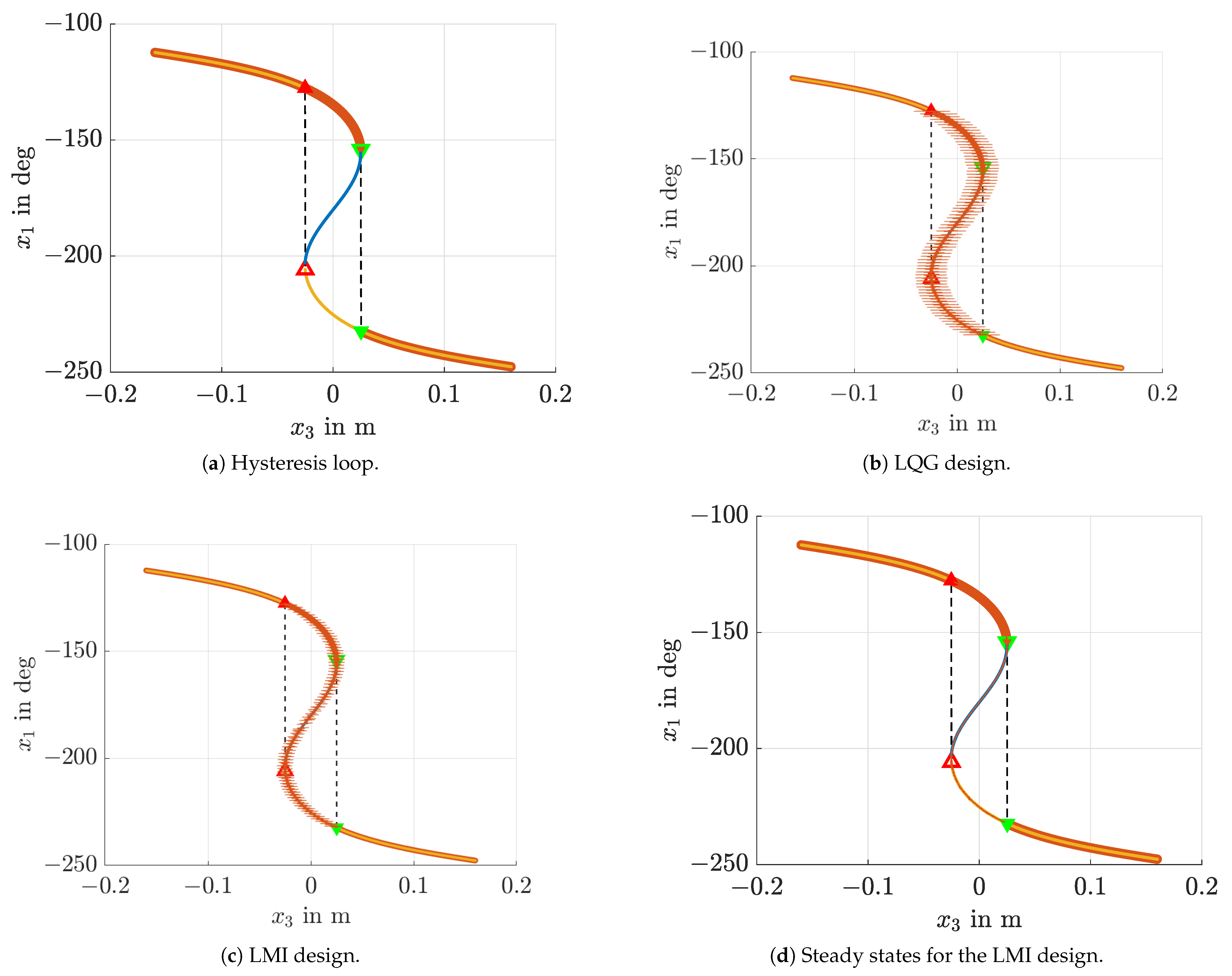
Figure 4a shows the numerically computed equilibria of the system (
58) in dependence of piecewise constant inputs
. The hysteresis behavior of the open-loop system can be clearly seen so that starting with angles of approximately
, an increase of
leads to a jump in the angle
(transition from the open to the filled green triangle at some
in
Figure 4), while successively reducing
leads to a jump between two different angles for some
(red triangles in
Figure 4).
Figure 4a can be interpreted as a bifurcation diagram in the phase space, where the branch between both open green and red triangles is unstable and is not visible in an open-loop operation of the system.
However, this branch can be visualized by using the closed-loop control strategy as shown in
Figure 4b,c with
where
is a piecewise constant reference signal and
holds in the second scenario due to the choice of
according to (
56) for the LMI-based controller (
12).
For the sake of comparison with a standard approach (which, however, does not strictly guarantee closed-loop stability due to the parameter dependency of the system model), an LQG approach has been implemented additionally. It makes use of a continuous-time steady-state Extended Kalman Filter. Both LQG and LMI approaches are parameterized with
,
, and
in this subsection, where
is chosen according to (
57).
The controller optimization in the LQG case was performed with
and
for the point-valued parameters
and
. These values were chosen to reflect the strongest instability of the open-loop plant for the control synthesis. Due to the state dependency of the system matrix in (
61), this parameterization does not provide a strict proof of stability. In contrast, the LMI approach provides a strict proof of stability and considerably reduced deviations in transient operation from the unstable branch of the bifurcation diagram compared to the LQG design. To limit the observer’s eigenvalues so that a simulation with a fixed step size of
is admissible, the heuristically chosen penalty term
was added onto
J, defined in (
41).
All simulations were performed for piecewise constant signals for
(hold time of
) with increments of approximately
. If only the terminal states of each step are plotted (cf.
Figure 4d), the LMI-case reconstructs the exact unstable branch with deviations of less than
, which is slightly better than in the LQG case. Obviously, the LMI-based solution approach does not only provide a strict proof of stability of the observer-based control structure but in addition, it leads to a significant reduction of the control effort, resulting also in much smoother values for
in
Figure 4c. The reduction of the control effort is investigated in more detail in the following example.
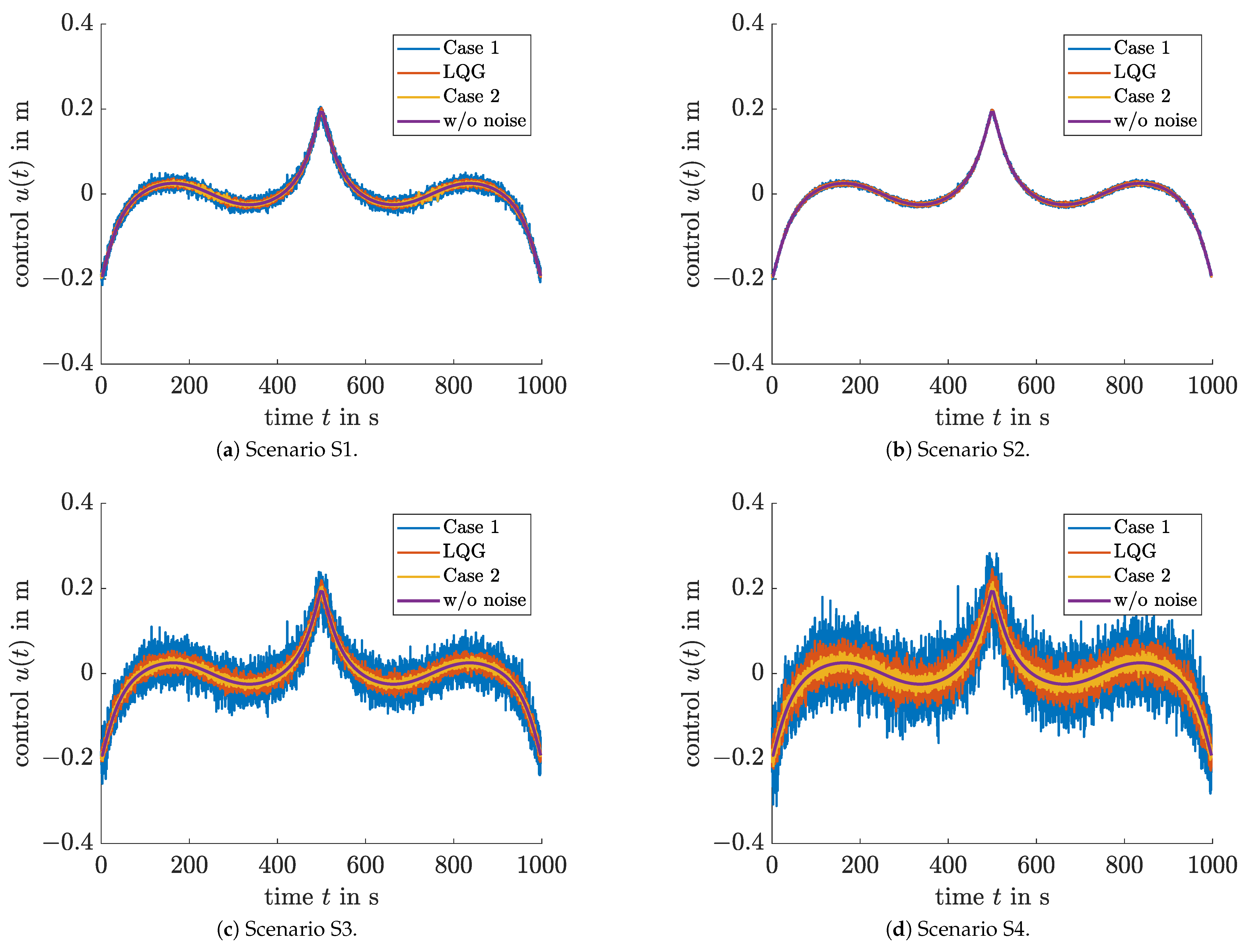
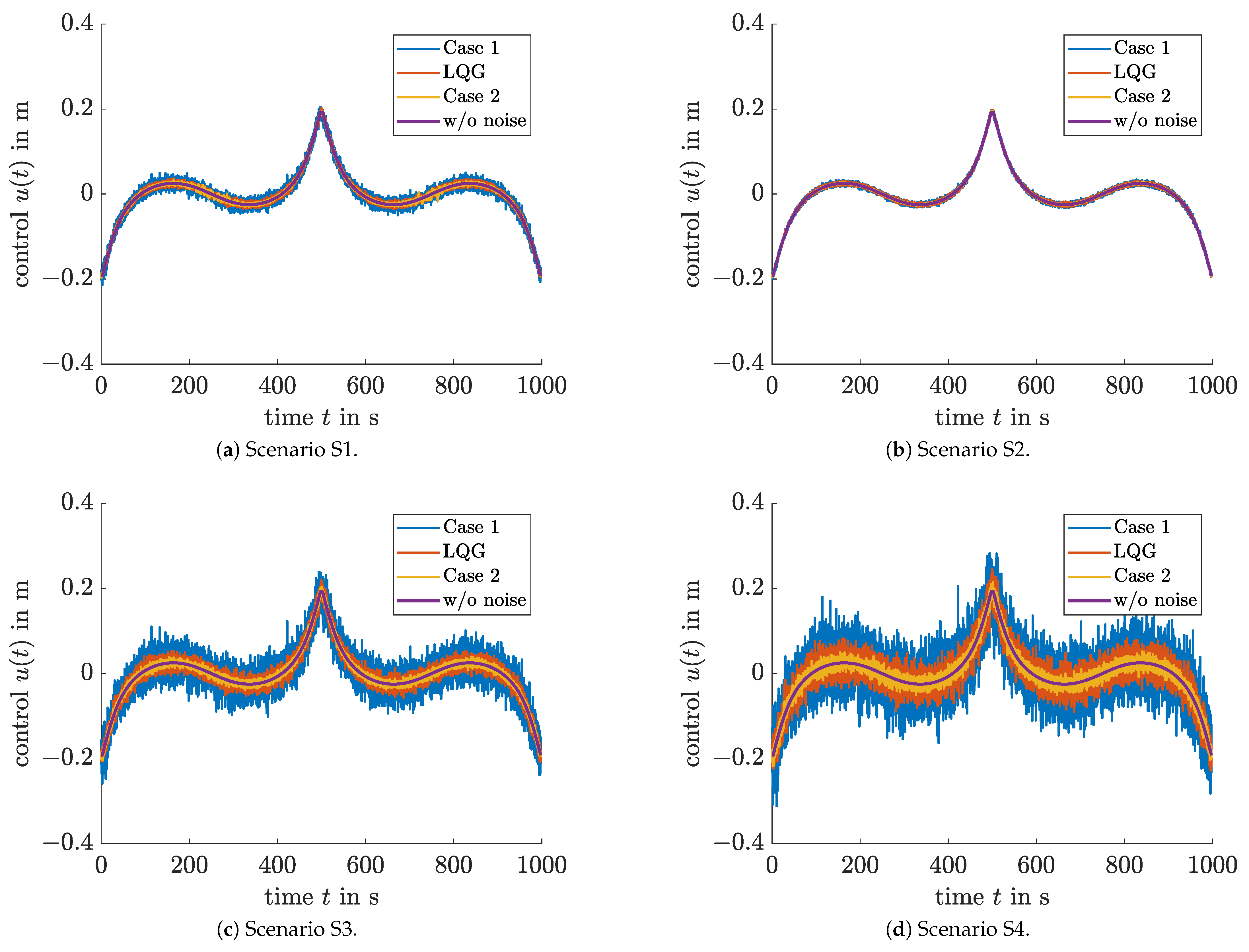
5.3. Trajectory Tracking Control
As a second application for the proposed LMI-based parameterization of the control laws (
10), Case 1, and (
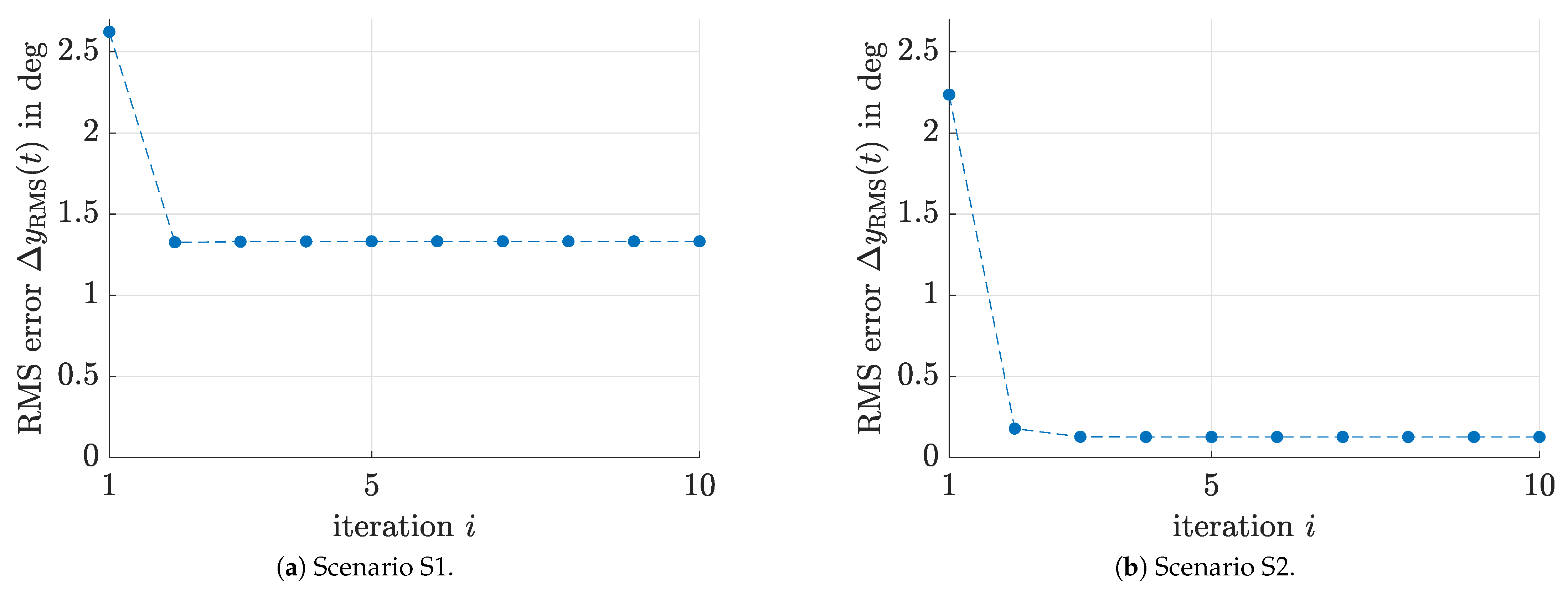
12), Case 2, and its comparison with the LQG design, consider the following four scenarios:
- S1:
, , ;
- S2:
, , ;
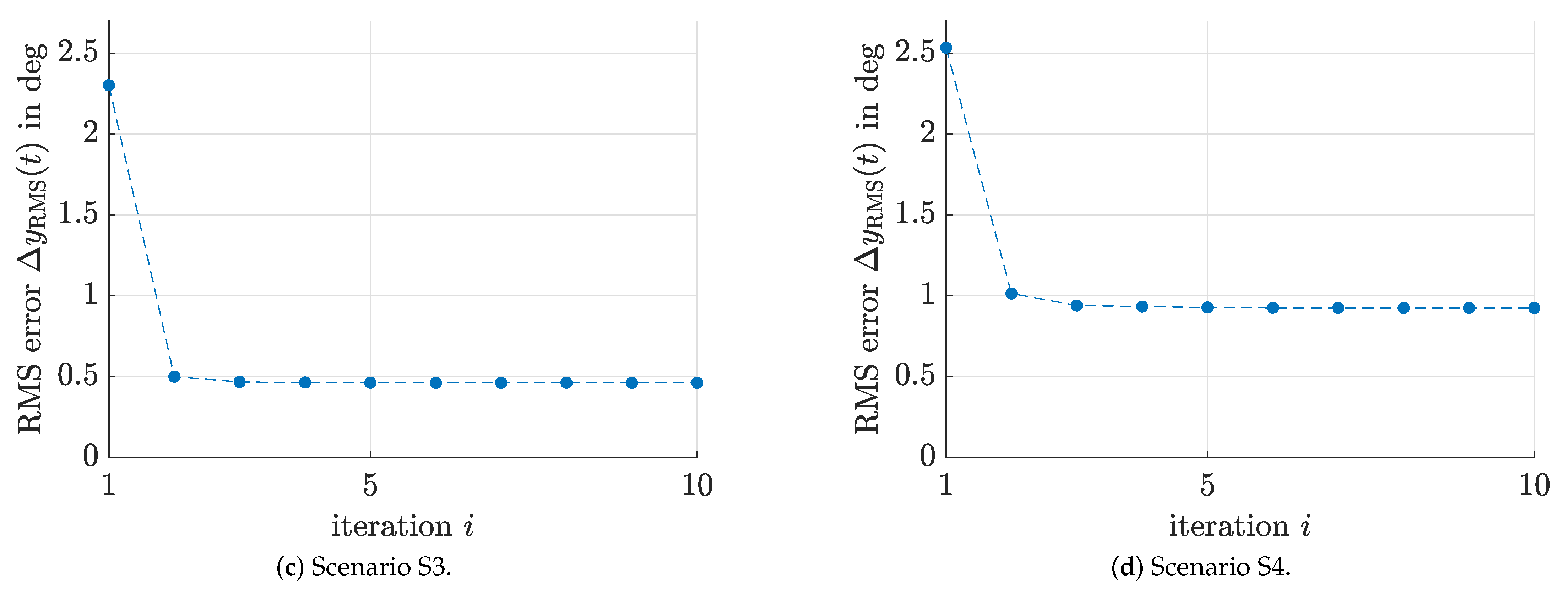
- S3:
, , ;
- S4:
, , .
Here, we assume tracking of a continuous reference trajectory along the unstable branch of the previously investigated bifurcation diagram.
Figure 5 presents a comparison of all three control approaches with an ideal tracking behavior in a noise-free setting. Obviously, the control effort of the LMI-based output feedback control is the best in all scenarios. This is achieved by minimizing the domain of non-provable stability properties and by feeding back only the first two components of the estimated state vector.
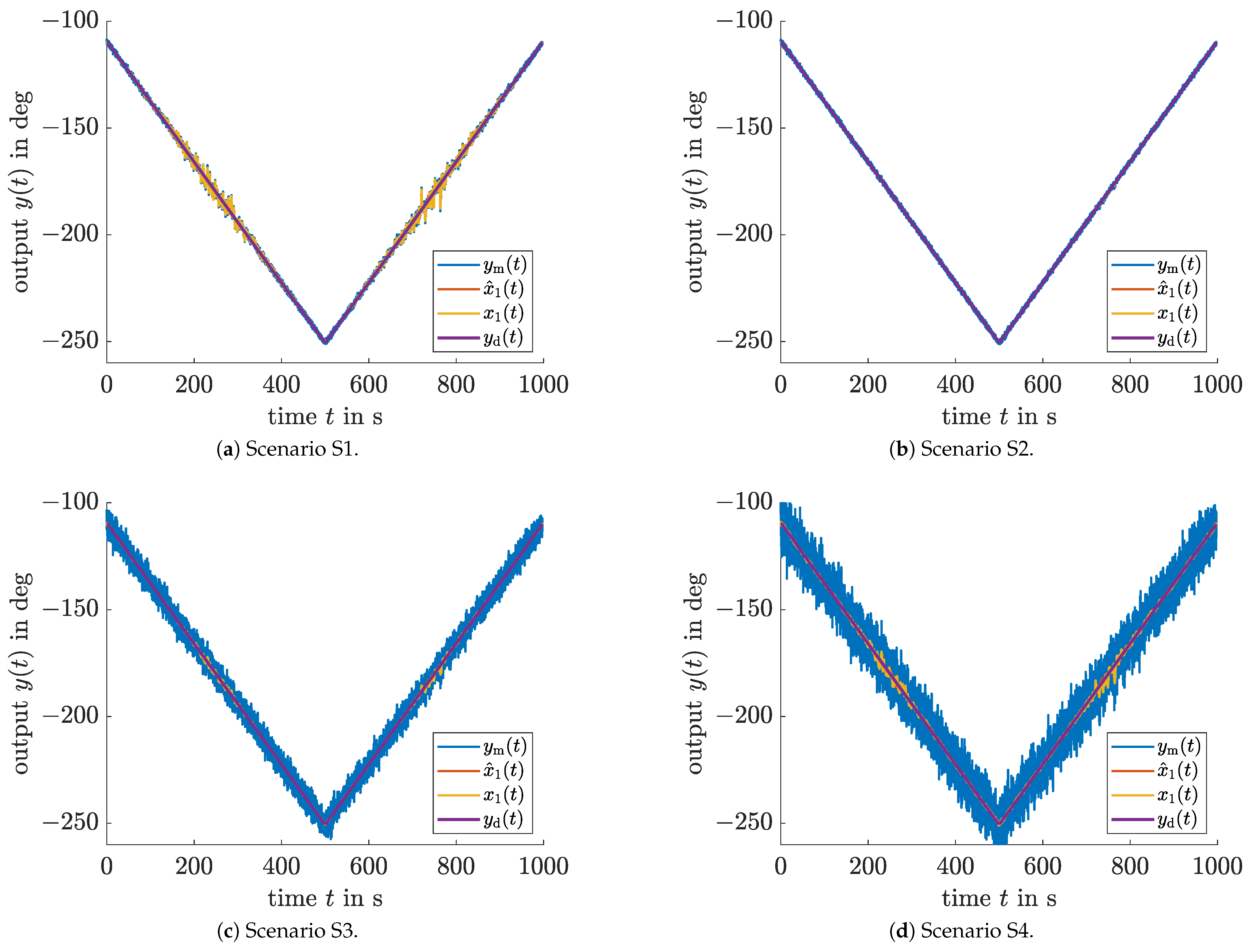
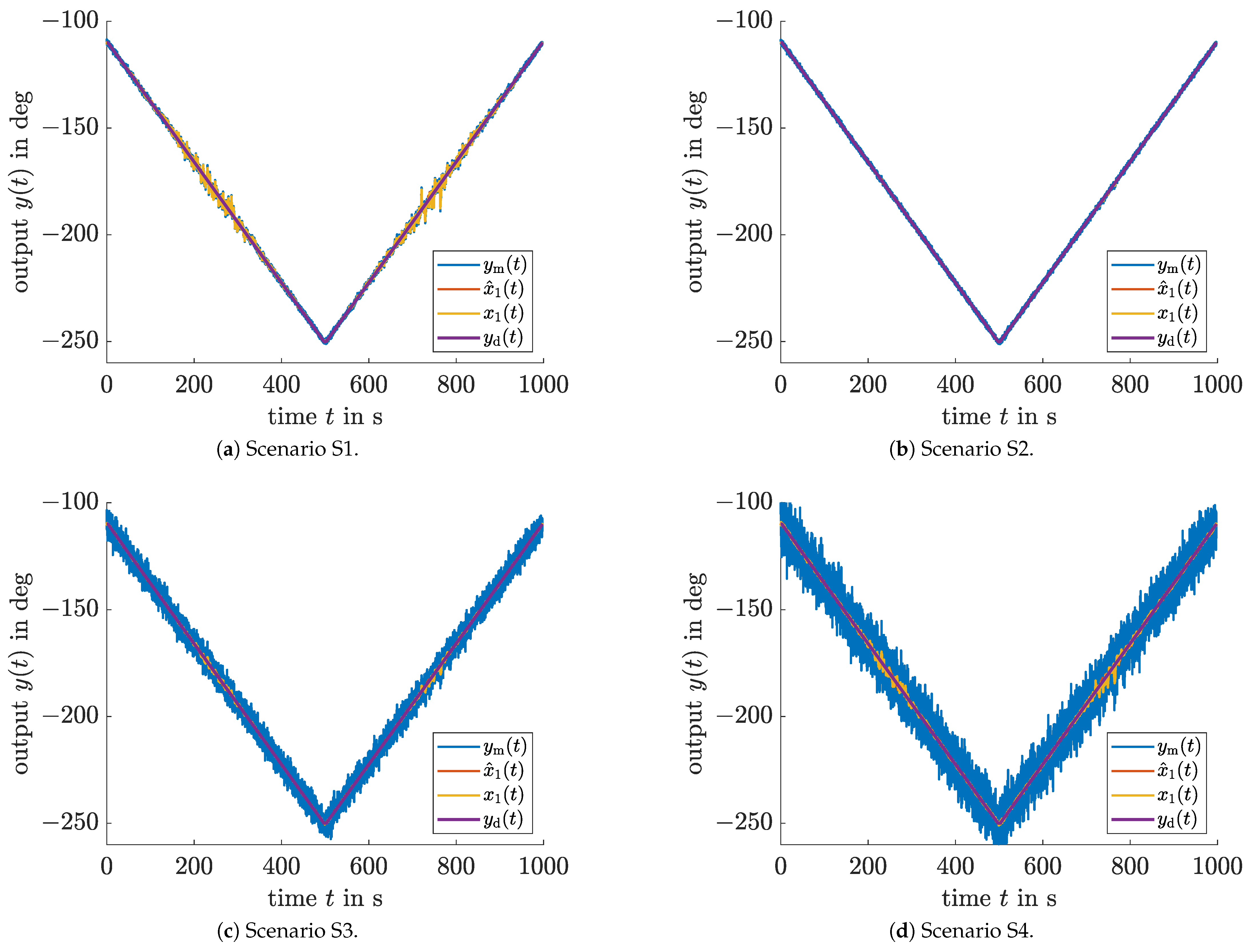
To achieve accurate tracking of the reference trajectory
in
Figure 6, the feedforward control signal
in (
10) and (
12) was chosen as a signal that is piecewise constant for intervals of
. It is determined in the sense of a P-type iterative learning control approach by the update rule
with the initialization
where
generally holds for
. The learning gain
, weighting the difference between the observed system output
in the iteration
i and the reference signal, is given by
where
is either the LQG controller’s gain, the full state feedback gain in (
10), or
for the partial state feedback (
12);
and
result from evaluating the system matrices in (
61) for the current state estimate
at the point of time
during the epoch
i (also denoted as
trial or
pass in the literature on iterative learning control).
For the first iteration
, the controller
is identical to (
66) introduced in the previous subsection due to the initialization (
68).
In addition to the accurate trajectory tracking for the final iteration
,
Figure 6 shows the strong suppression of measurement noise by the LMI-based observer and the fact that the actual trajectories for the state
and the corresponding estimate
practically cannot be distinguished within the graphical resolution. Finally,
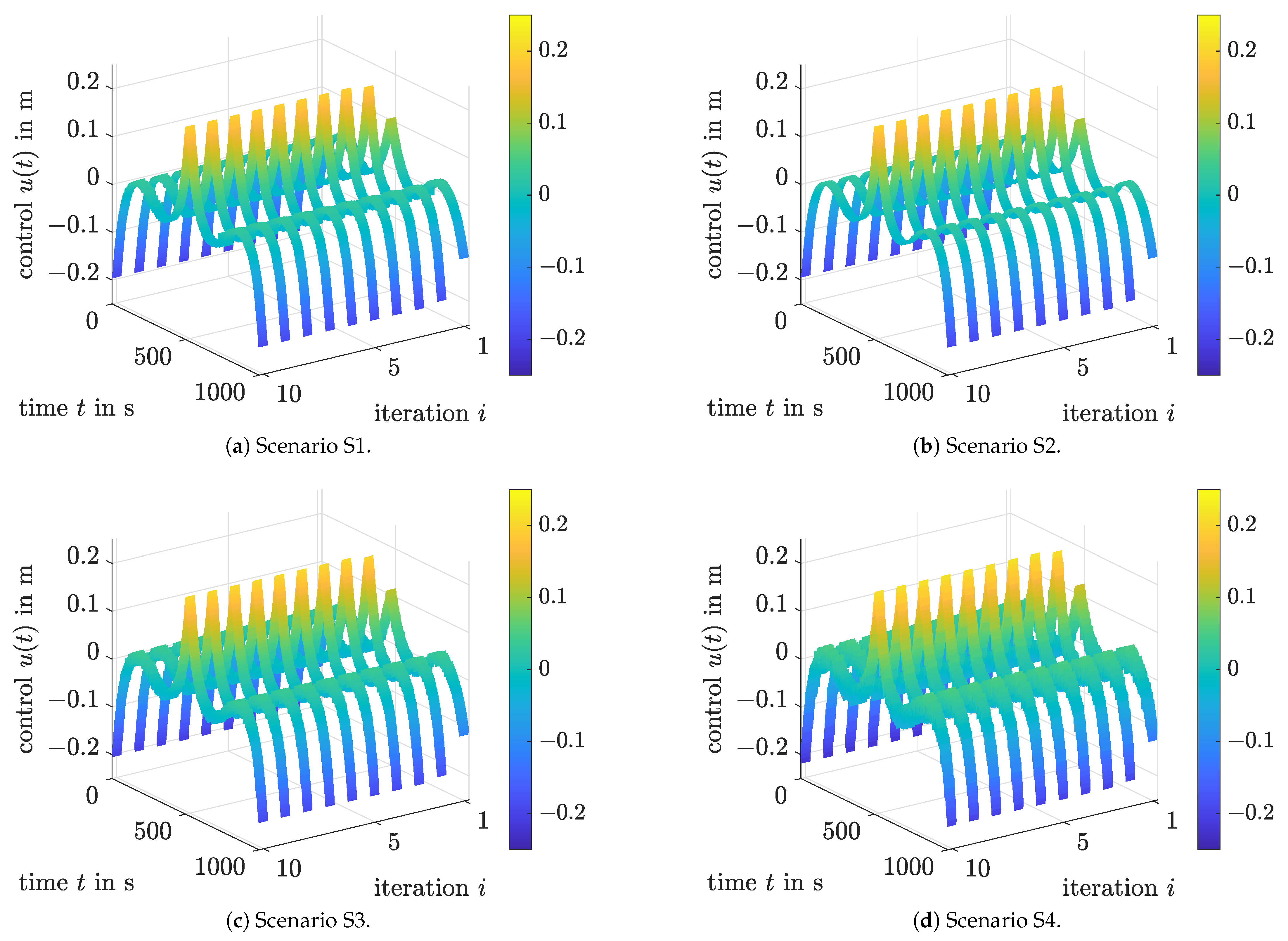
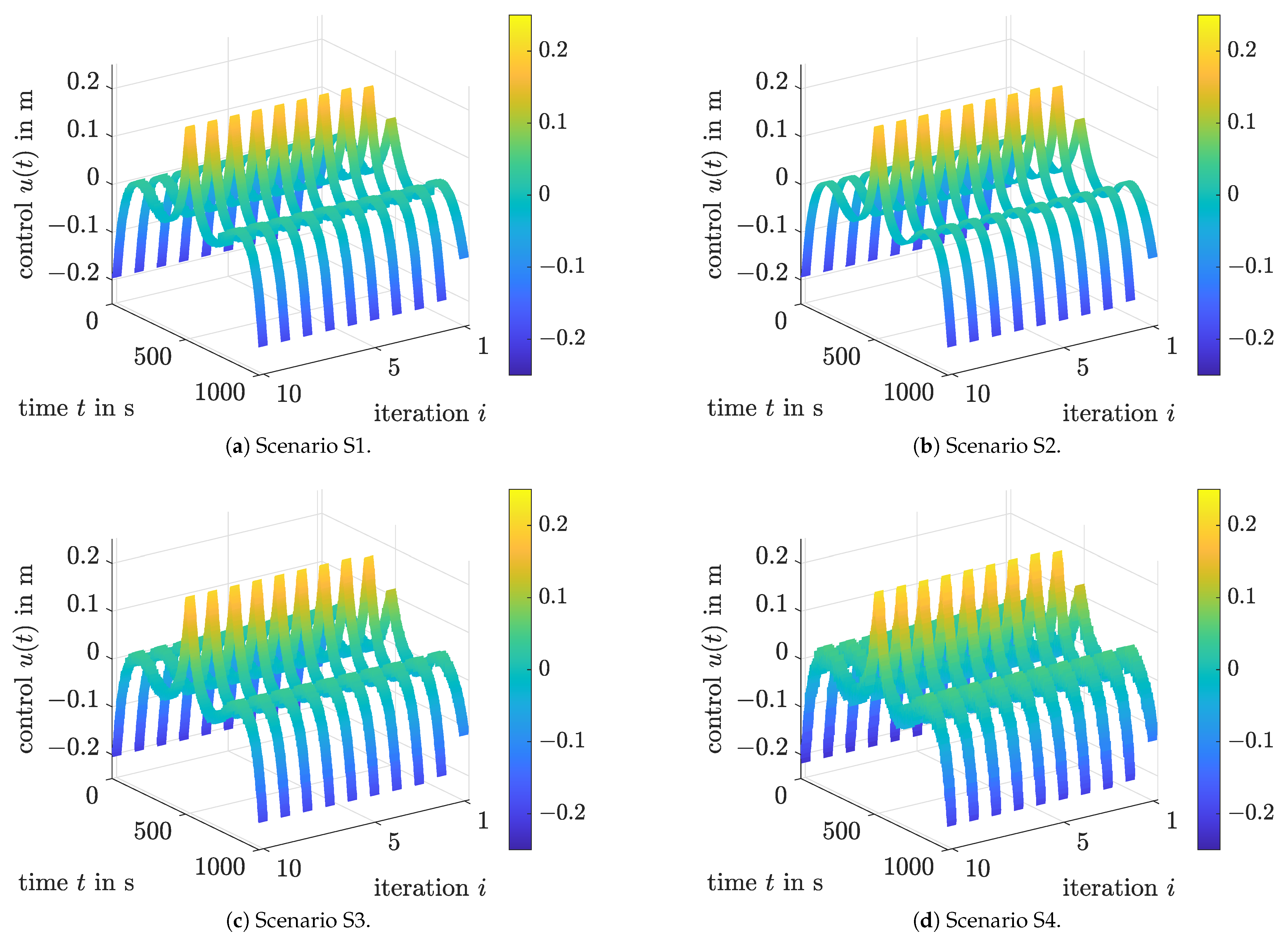
Figure 7 and
Figure 8 show the noise-insensitive convergence of the control signals and root mean square (RMS) output tracking errors for all four scenarios S1–S4.
As a summary, all three control approaches are compared in
Table 1. It can be observed that the LMI-based output feedback controller (Case 2) has the smallest deviations between the actual control signals
and the ideal noise-free system inputs
. This is shown by a reduction of the RMS values
of the system inputs by more than
in all scenarios
, in comparison with the LQG implementation. These RMS values are evaluated on an equidistant discretization grid with
leading to
.
Moreover, the full state feedback according to Case 1 has a quality comparable to that of the classical LQG in terms of the control amplitudes as well as the output RMS values
where
is the simulated first state variable in the respective scenario
. However, in comparison to the LQG, it possesses a strict proof of stability despite the polytopic parameter uncertainty, which makes the separation principle invalid as discussed in
Section 2. Concerning Case 2, which is less accurate concerning output tracking than the full state feedback, it should be pointed out that the RMS output values are significantly smaller than the standard deviations of the measurement noise, except for scenario S1, where a large additive disturbance acts directly on the control input.
From a practical point of view, it is necessary to make a trade-off between tracking accuracy and control effort. Using the presented approach, the partial state feedback (Case 2) reduces the control effort in comparison to the full state feedback (Case 1), however, with the cost of a slight decrease in tracking accuracy.
6. Conclusions and Outlook on Future Work
In this paper, a novel iterative LMI solution for the joint control and observer parameterization of systems with polytopic parameter uncertainty and stochastic process, actuator, and sensor noise was derived. It is, by construction, equally applicable to the design of observer-based state and output feedback approaches. Most importantly, it allows for a guaranteed stabilization of the system dynamics despite bounded (polytopic) uncertainty in the system matrices, which makes the classical separation principle of control and observer design invalid. It was shown in benchmark simulations that the approach outperforms an LQG design for which a point-valued system model was used for the underlying controller and observer parameterization and, therefore, does not guarantee stability by design.
In future work, this approach will be further investigated for discrete-time processes. Moreover, it is desired to optimize the structure of output feedback controllers and reduced-order observers for high-dimensional systems such that the number of variables that are required for a robust parameterization is minimized. Finally, we aim at introducing and optimizing weighting factors for the diagonal entries in the matrix (
47) so that, during the minimization of (
41), the user can decide which of the individual states (or estimation error signals) has the highest importance. This extension will have similarities to tuning the ratio between the weighting matrix entries for state deviations in the classical LQR design.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}