
Interval Extended Kalman Filter—Application to Underwater Localization and Control

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
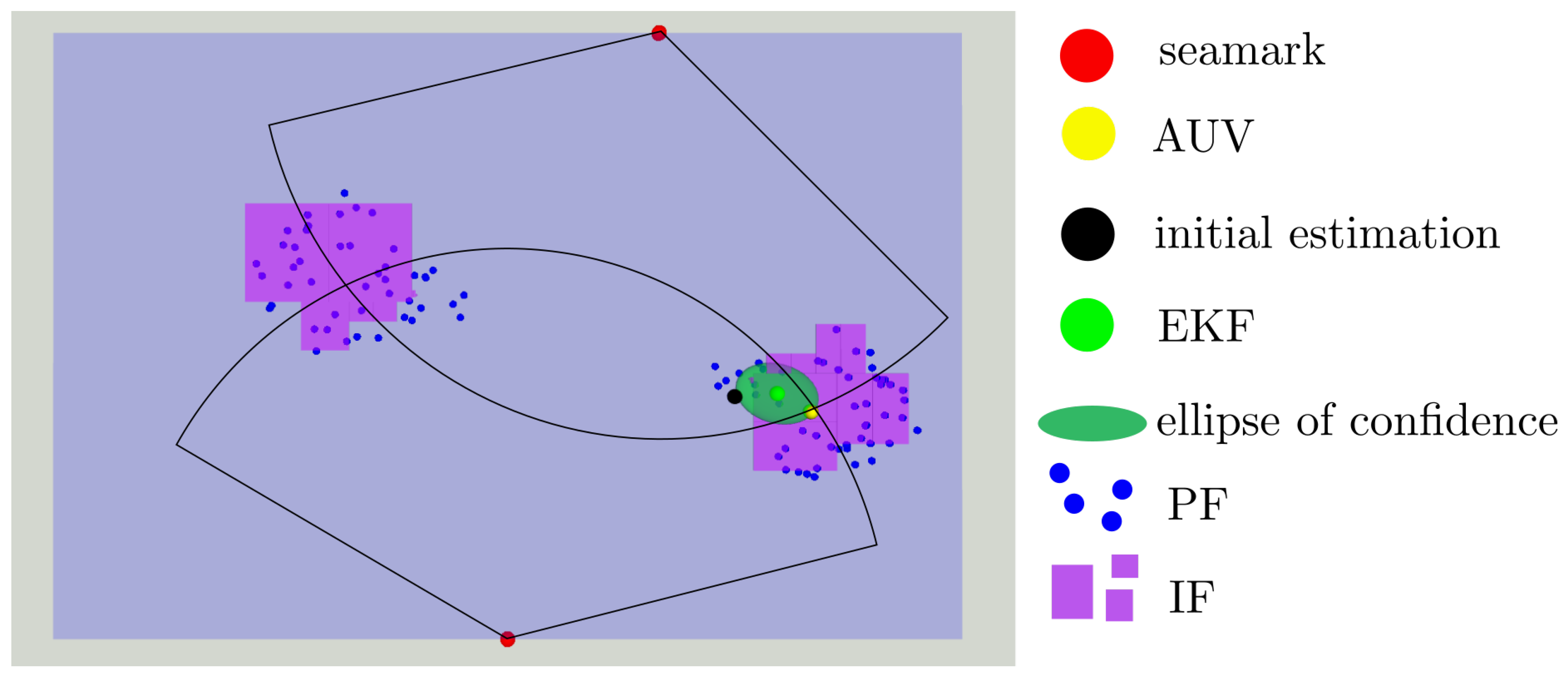
- The set membership approach [4] is over-pessimistic. Its principle is to discard states [5] that are inconsistent with the collected data. Since no consistent state is rejected, these approaches have a high level of integrity [6,7], even if they are considered are not precise. Usually, the implementation uses interval analysis and leads to what we can call an interval filter (IF) [8].
2. Introductory Problem
3. Filters
3.1. Extended Kalman Filter
3.2. Interval Filter
| Algorithm 1:Algorithm of at the iteration k |
Input: the boxes Output: the same updated boxes |
3.3. Interval Extended Kalman Filter
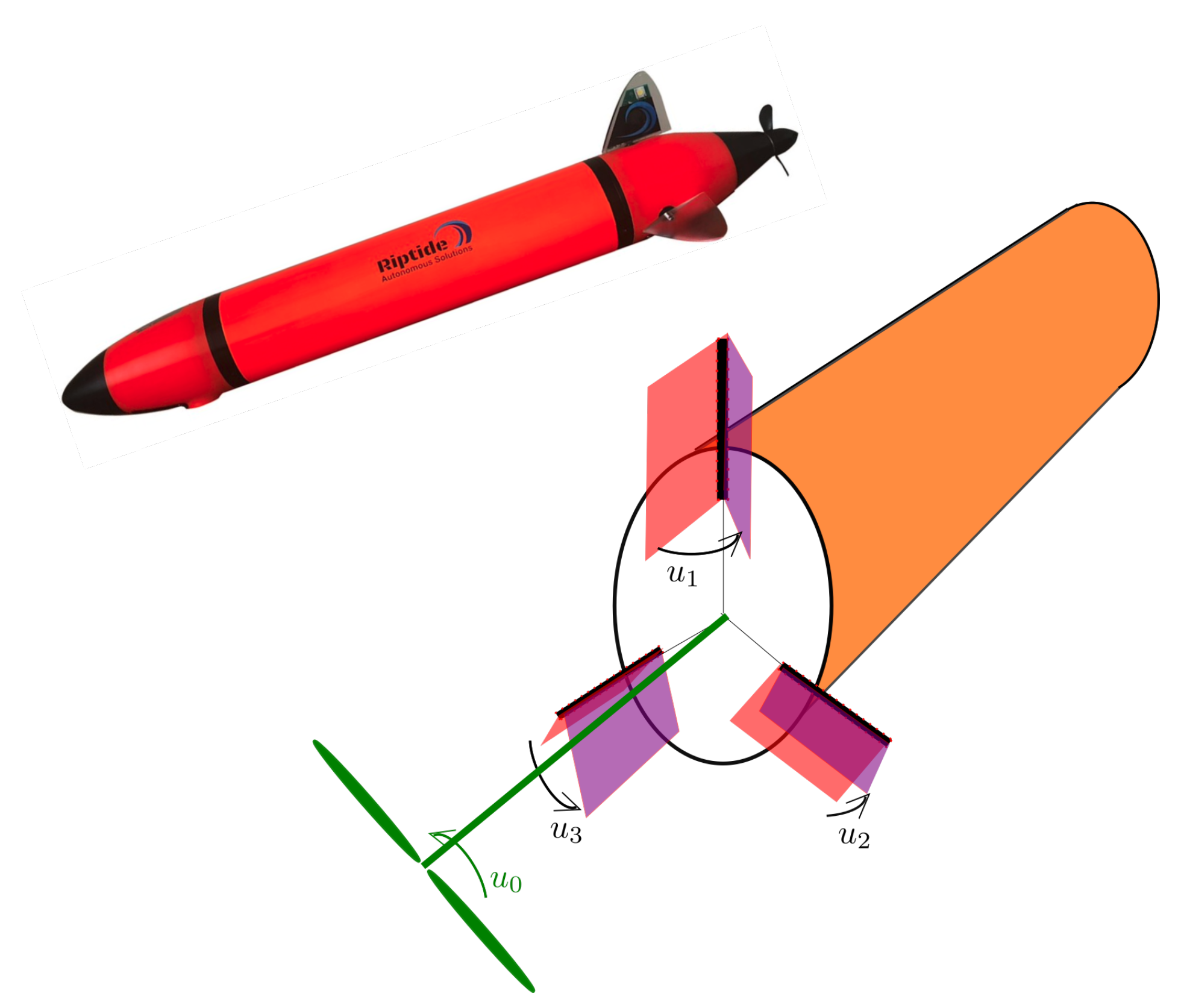
4. Test-Cases
- and are known parameters. represents the effect of the propeller’s speed on the acceleration while represents the water friction.
- is the known repartition matrix.
- is the position of the robot.
- is the orientation matrix.
- is its longitudinal speed (lateral speed are supposed to be null).
- is its angular speed vector.
- In the first one, the initial estimation of the position of the robot has an error of 1 m.
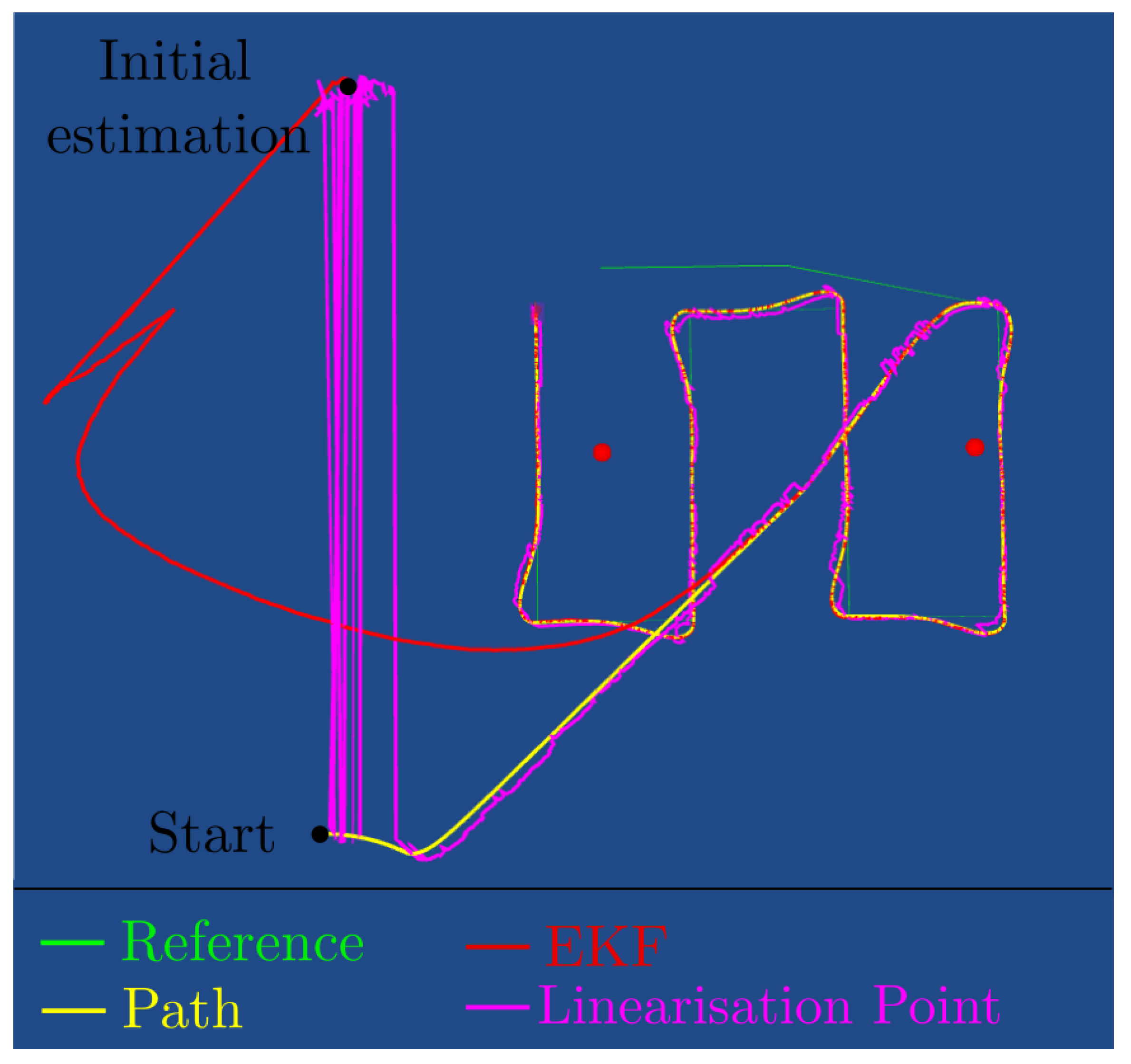
- In the second one, the initial position is chosen to make the Extended Kalman Filter diverge. The initial error is large, approximately 23 m (see Figure 7).
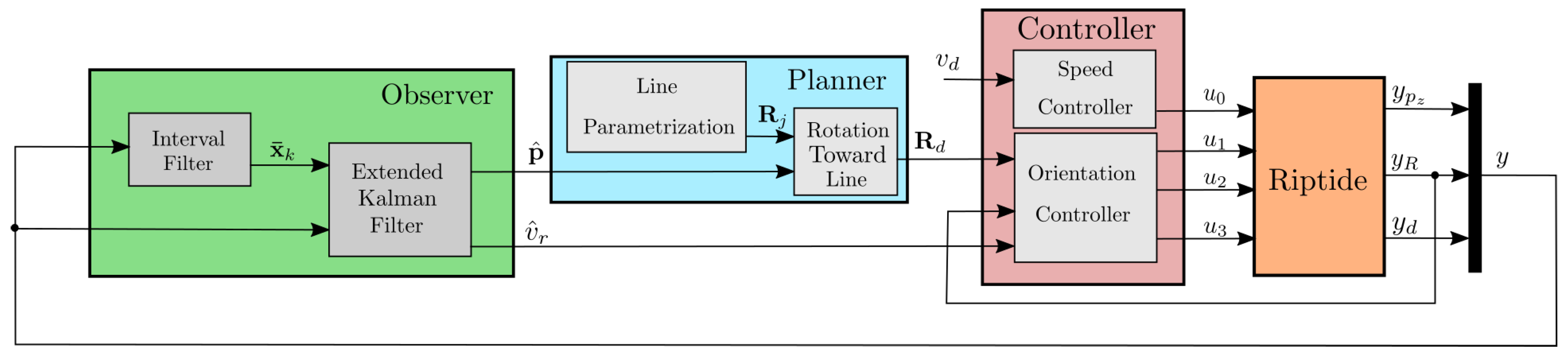
5. Simulation Results
5.1. Interval Analysis Observer
5.2. Extended Kalman Filter
5.3. Extended Kalman Filter with Interval Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Thrun, S.; Bugard, W.; Fox, D. Probabilistic Robotics; MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Julier, S.; Uhlmann, J. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Ljung, L. Asymptotic Behavior of the Extended Kalman Filter as a Parameter Estimator for Linear Systems. IEEE Trans. Autom. Syst. 1979, 24, 36–50. [Google Scholar] [CrossRef]
- Milanese, M.; Norton, J.; Piet-Lahanier, H.; Walter, E. (Eds.) Bounding Approaches to System Identification; Plenum Press: New York, NY, USA, 1996. [Google Scholar]
- Jaulin, L.; Kieffer, M.; Didrit, O.; Walter, E. Applied Interval Analysis, with Examples in Parameter and State Estimation, Robust Control and Robotics; Springer-Verlag: London, UK, 2001. [Google Scholar]
- Drevelle, V.; Bonnifait, P. High integrity GNSS location zone characterization using interval analysis. In Proceedings of the 22nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2009), Savannah, GA, USA, 22–25 September 2009. [Google Scholar]
- Rauh, A.; Auer, E. Interval Approaches to Reliable Control of Dynamical Systems. In Proceedings of the Computer-Assisted Proofs—Tools, Methods and Applications, Wadern, Germany, 15–20 November 2009. [Google Scholar]
- Rohou, S.; Jaulin, L.; Mihaylova, M.; Bars, F.L.; Veres, S. Guaranteed Computation of Robots Trajectories. Robot. Auton. Syst. 2017, 93, 76–84. [Google Scholar] [CrossRef]
- Abdallah, F.; Gning, A.; Bonnifait, P. Box particle filtering for nonlinear state estimation using interval analysis. Automatica 2008, 44, 807–815. [Google Scholar] [CrossRef]
- Gning, A.; Ristic, B.; Mihaylova, L.; Abdallah, F. An Introduction to Box Particle Filtering. IEEE Signal Process. Mag. 2013, 30, 166–171. [Google Scholar] [CrossRef]
- Neuland, R.; Nicola, J.; Maffei, R.; Jaulin, L.; Prestes, E.; Kolberg, M. Hybridization of Monte Carlo and Set-membership Methods for the Global Localization of Underwater Robots. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 199–204. [Google Scholar]
- Neuland, R.; Mantelli, M.; Hummes, B.; Jaulin, L.; Maffei, R.; Prestes, E.; Kolberg, M. Robust Hybrid Interval-Probabilistic Approach for the Kidnapped Robot Problem. Int. J. Uncertain. Fuzziness Knowl. Based Syst. 2020, 29, 313–331. [Google Scholar] [CrossRef]
- Tran, T.; Jauberthie, C.; Trave-massuyes, L.; Lu, Q. Interval Kalman filter enhanced by lowering the covariance matrix upper bound. Ifac Pap. 2017, 50, 1595–1600. [Google Scholar] [CrossRef]
- Jaulin, L. Mobile Robotics; ISTE: London, UK, 2015. [Google Scholar]
- Colle, E.; Galerne, S. Mobile robot localization by multiangulation using set inversion. Robot. Auton. Syst. 2013, 61, 39–48. [Google Scholar] [CrossRef]
- Kieffer, M.; Jaulin, L.; Walter, E. Guaranteed Recursive Nonlinear State Estimation Using Interval Analysis. In Proceedings of the 37th IEEE Conference on Decision and Control, Tampa, FL, USA, 18 December 1998; pp. 3966–3971. [Google Scholar]
- Moore, R.E. Interval Analysis; Prentice-Hall: Englewood Cliffs, NJ, USA, 1966. [Google Scholar]
- Kreinovich, V.; Lakeyev, A.; Rohn, J.; Kahl, P. Computational Complexity and Feasibility of Data Processing and Interval Computations. Reliab. Comput. 1997, 4, 405–409. [Google Scholar]
- Ramdani, N.; Poignet, P. Robust dynamic experimental identification of robots with set membership uncertainty. IEEE/ASME Trans. Mechatronics 2005, 10, 253–256. [Google Scholar] [CrossRef]
- Desrochers, B.; Jaulin, L. A Minimal Contractor for the Polar Equation; Application to Robot Localization. Eng. Appl. Artif. Intell. 2016, 55, 83–92. [Google Scholar] [CrossRef]
- Dit Sandretto, J.A.; Trombettoni, G.; Daney, D.; Chabert, G. Certified Calibration of a Cable-Driven Robot Using Interval Contractor Programming. In Computational Kinematics; Thomas, F., Gracia, A.P., Eds.; Springer: Dordrecht, The Netherlands, 2014. [Google Scholar]
- Combastel, C. A State Bounding Observer for Uncertain Non-linear Continuous-time Systems based on Zonotopes. In Proceedings of the 44th IEEE Conference on Decision and Control, andthe European Control Conference, Seville, Spain, 12–15 December 2005. [Google Scholar]
- Raissi, T.; Ramdani, N.; Candau, Y. Set membership state and parameter estimation for systems described by nonlinear differential equations. Automatica 2004, 40, 1771–1777. [Google Scholar] [CrossRef]
- Ramdani, N.; Nedialkov, N. Computing Reachable Sets for Uncertain Nonlinear Hybrid Systems using Interval Constraint Propagation Techniques. Nonlinear Anal. Hybrid Syst. 2011, 5, 149–162. [Google Scholar] [CrossRef]
- Sandretto, J.A.D.; Chapoutot, A. Validated Simulation of Differential Algebraic Equations with Runge-Kutta Methods. Reliab. Comput. 2016, 22, 56–77. [Google Scholar]
- Meizel, D.; Preciado-Ruiz, A.; Halbwachs, E. Estimation of mobile robot localization: Geometric approaches. In Bounding Approaches to System Identification; Milanese, M., Norton, J., Piet-Lahanier, H., Walter, E., Eds.; Plenum Press: New York, NY, USA, 1996; pp. 463–489. [Google Scholar]
- Pronzato, L.; Walter, E. Robustness to outliers of bounded-error estimators and consequences on experiment design. In Bounding Approaches to System Identification; Milanese, M., Norton, J., Piet-Lahanier, H., Walter, E., Eds.; Plenum: New York, NY, USA, 1996; pp. 199–212. [Google Scholar]
- Meizel, D.; Lévêque, O.; Jaulin, L.; Walter, E. Initial Localization by Set Inversion. IEEE Trans. Robot. Autom. 2002, 18, 966–971. [Google Scholar] [CrossRef]
- Benhamou, F.; Goualard, F.; Granvilliers, L.; Puget, J.F. Revising Hull and Box Consistency. In Logic Programming: Proceedings of the 1999 International Conference on Logic Programming; MIT Press: Chambridge, MA, USA, 1999; pp. 230–244. [Google Scholar]
- Fossen, T. Guidance and Control of Ocean Vehicles; Wiley: New York, NY, USA, 1995. [Google Scholar]
- Sola, J.; Deray, J.; Atchuthan, D. A micro Lie theory for state estimation in robotics. arXiv 2018, arXiv:1812.01537. [Google Scholar]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Louédec, M.; Jaulin, L. Interval Extended Kalman Filter—Application to Underwater Localization and Control. Algorithms 2021, 14, 142. https://doi.org/10.3390/a14050142
Louédec M, Jaulin L. Interval Extended Kalman Filter—Application to Underwater Localization and Control. Algorithms. 2021; 14(5):142. https://doi.org/10.3390/a14050142
Chicago/Turabian StyleLouédec, Morgan, and Luc Jaulin. 2021. "Interval Extended Kalman Filter—Application to Underwater Localization and Control" Algorithms 14, no. 5: 142. https://doi.org/10.3390/a14050142
APA StyleLouédec, M., & Jaulin, L. (2021). Interval Extended Kalman Filter—Application to Underwater Localization and Control. Algorithms, 14(5), 142. https://doi.org/10.3390/a14050142