
Optimal Coronavirus Optimization Algorithm Based PID Controller for High Performance Brushless DC Motor


Abstract
1. Introduction
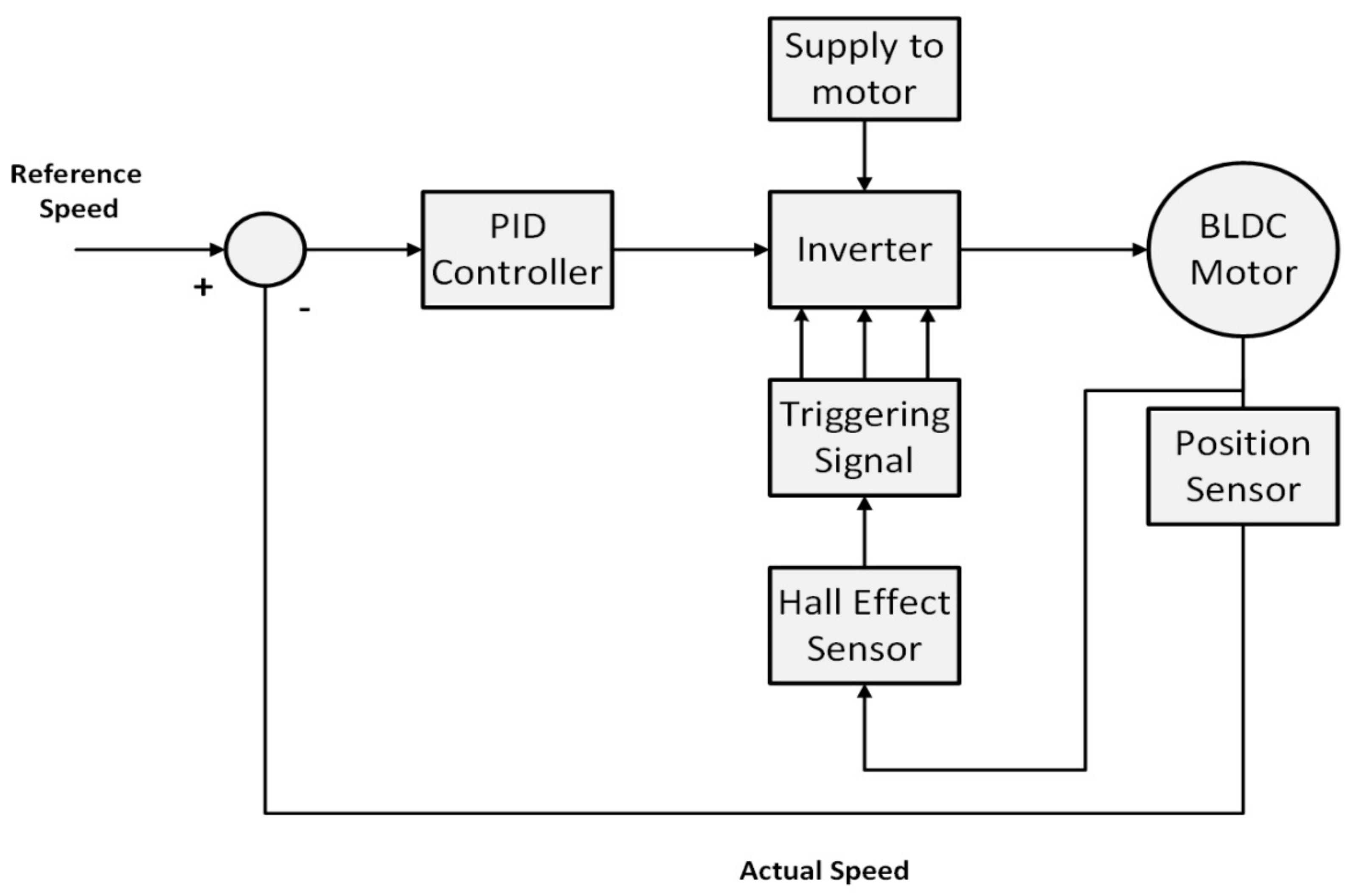
2. BLDC Motor Dynamic Model
3. Control Techniques
3.1. GA Based PID Controller
3.2. HS Based PID Controller
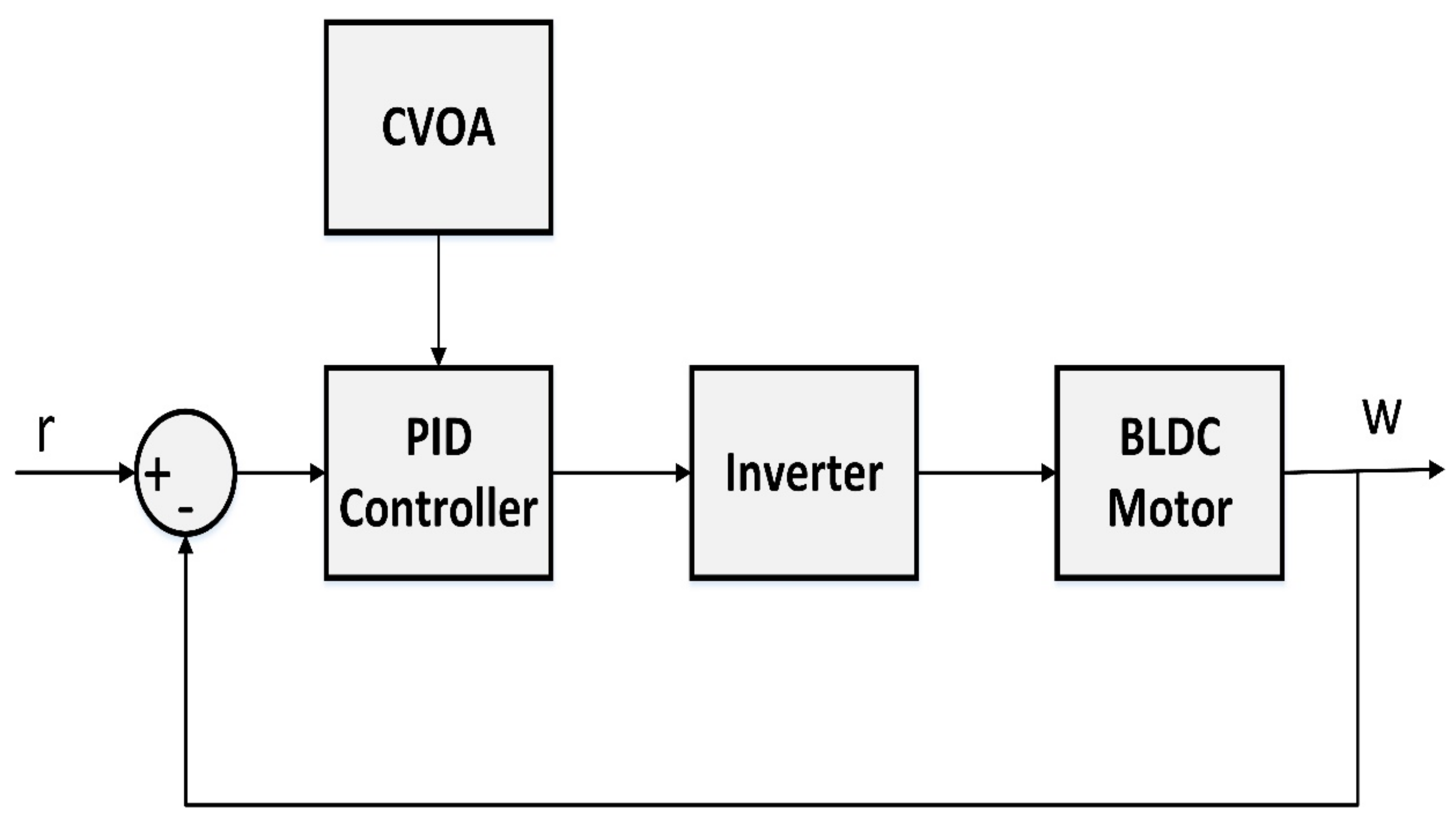
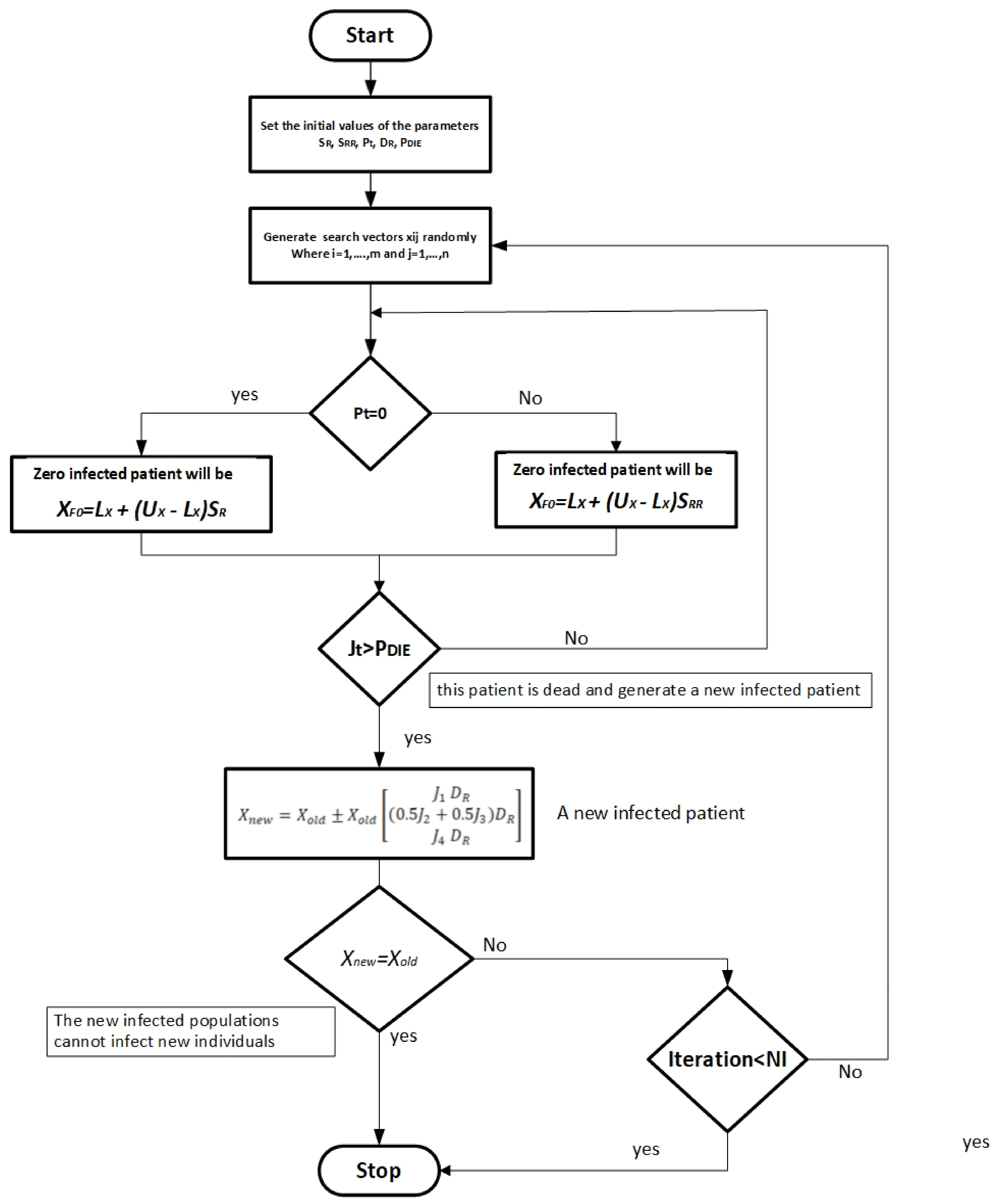
3.3. CVOA Based PID Controller
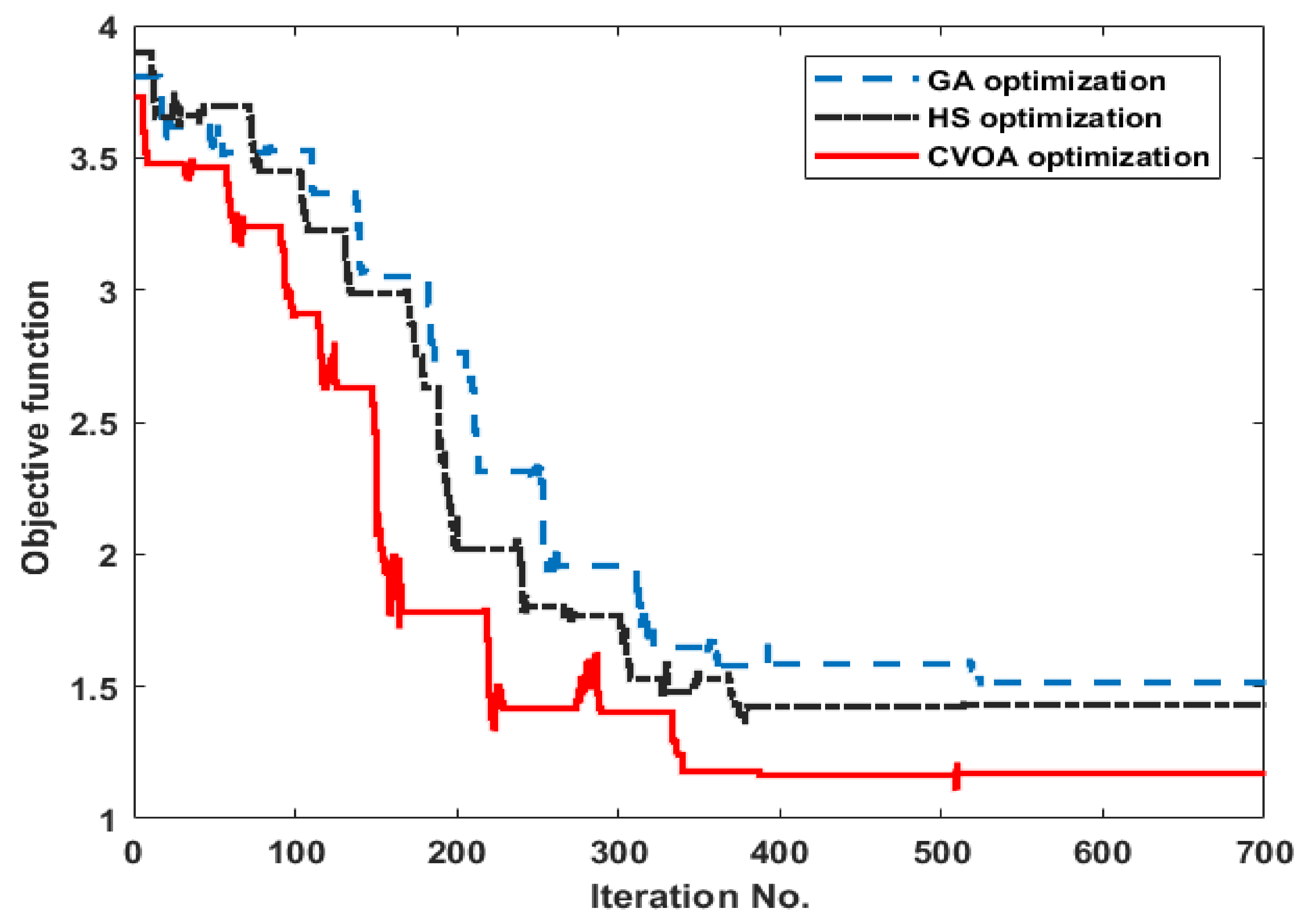
3.4. Optimization Results
4. Simulation Results
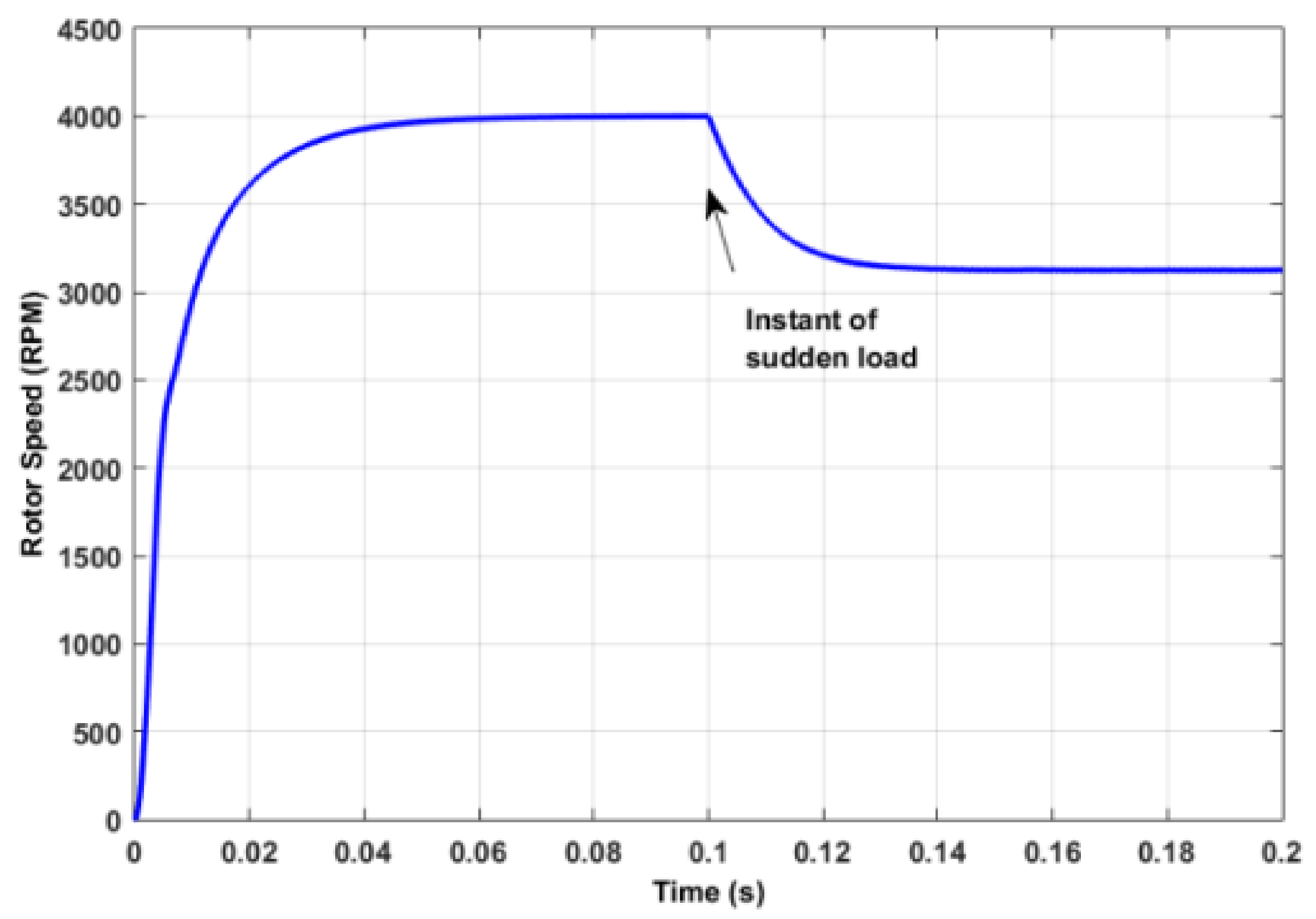
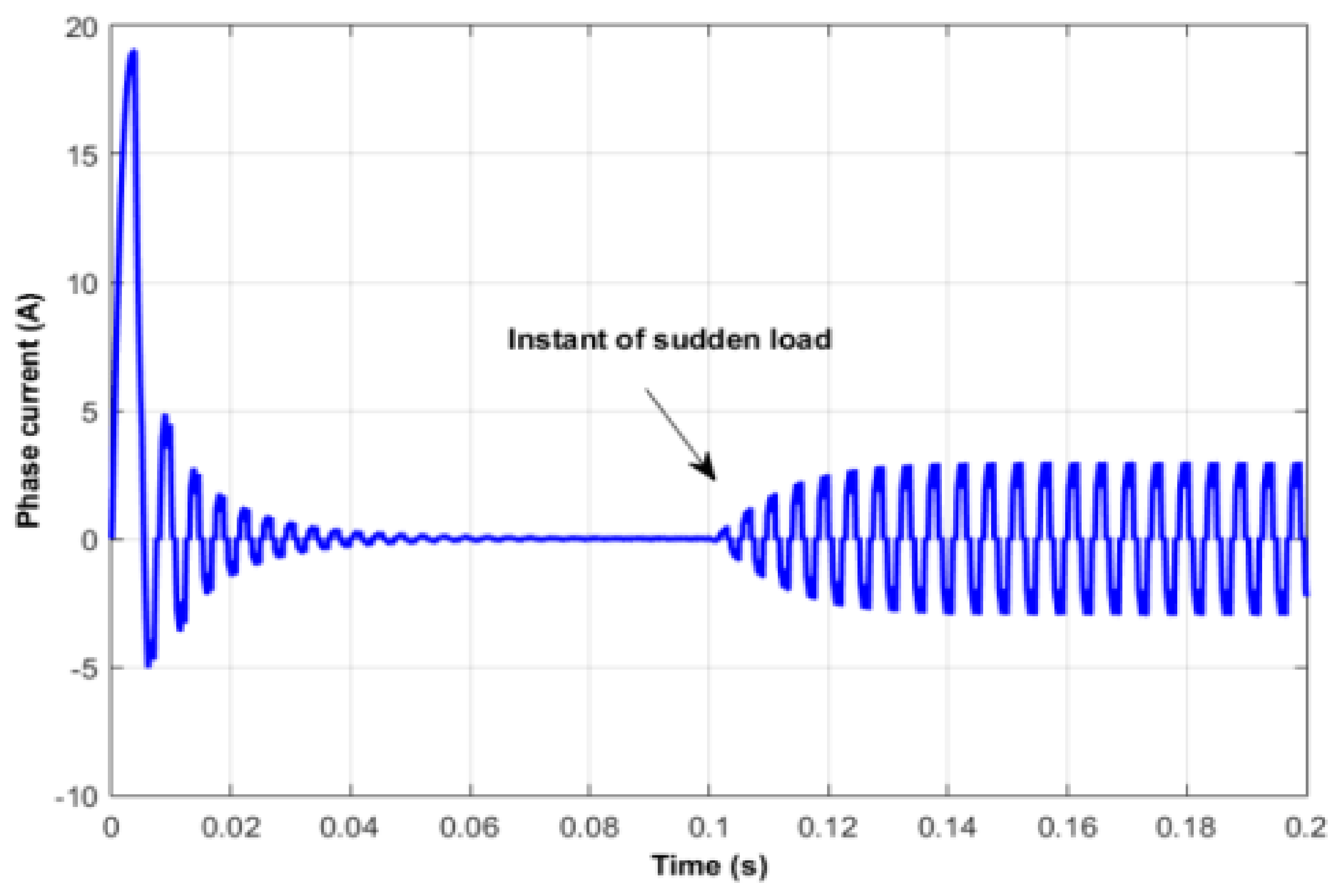
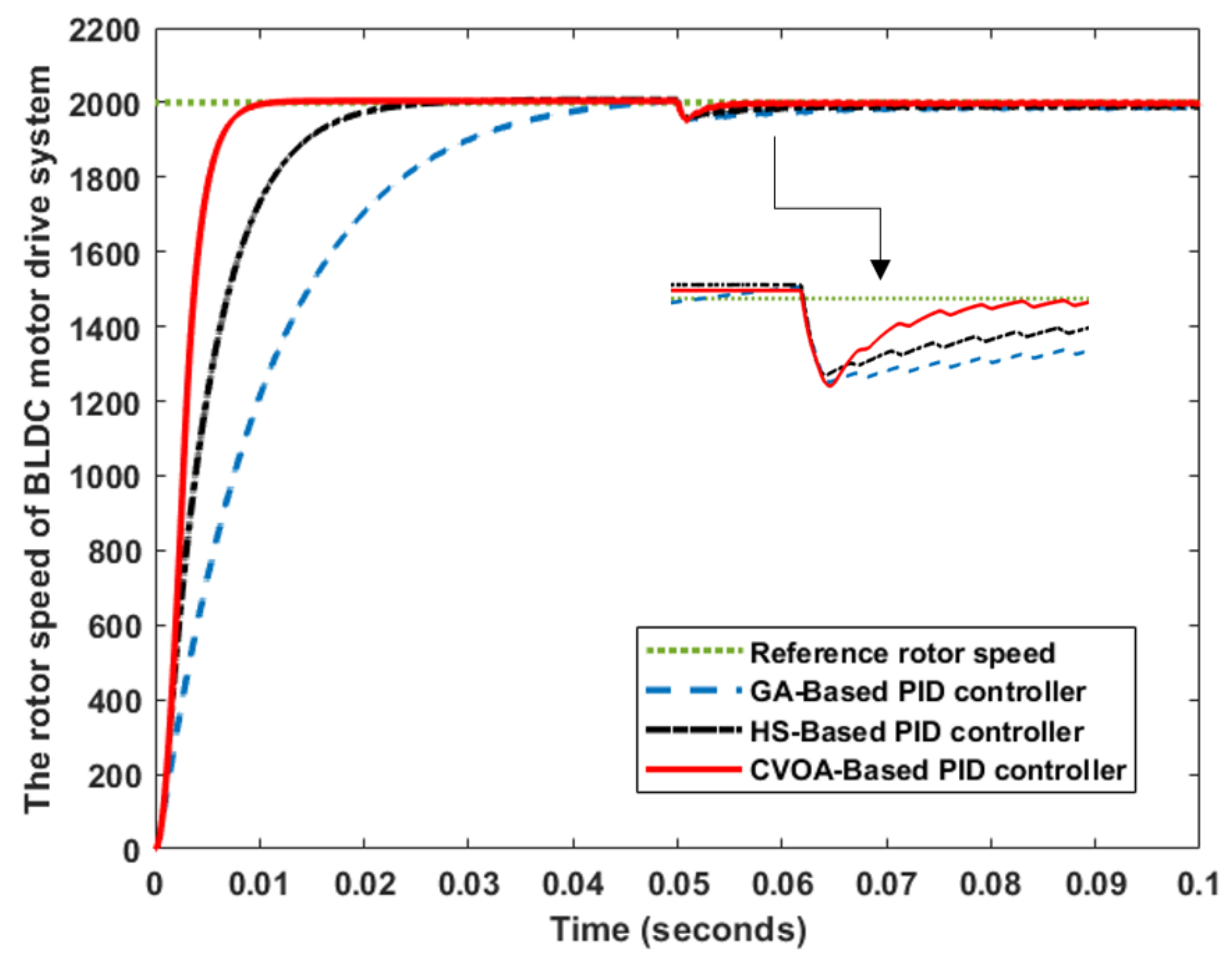
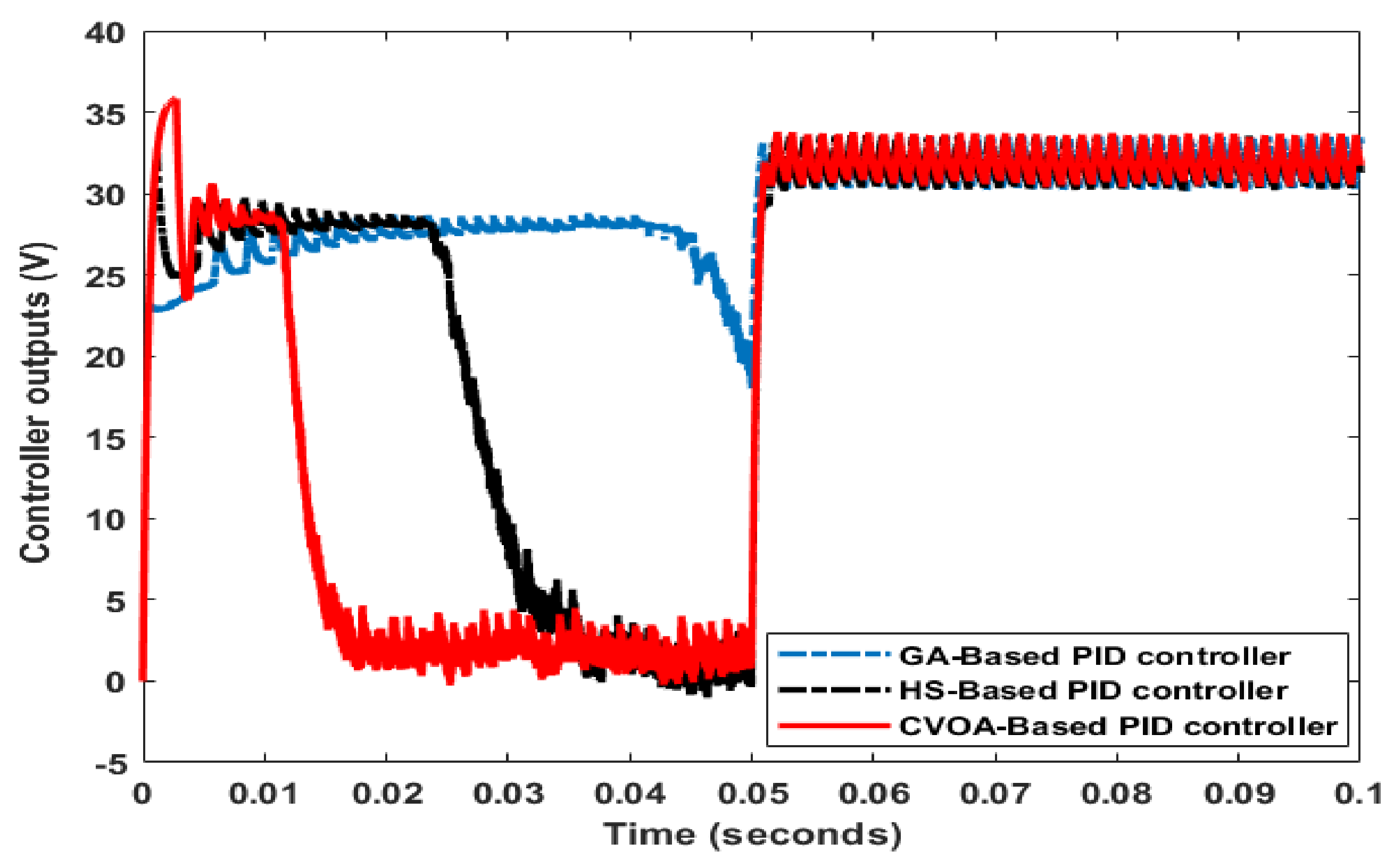
4.1. Speed Regulation at Sudden Load Case
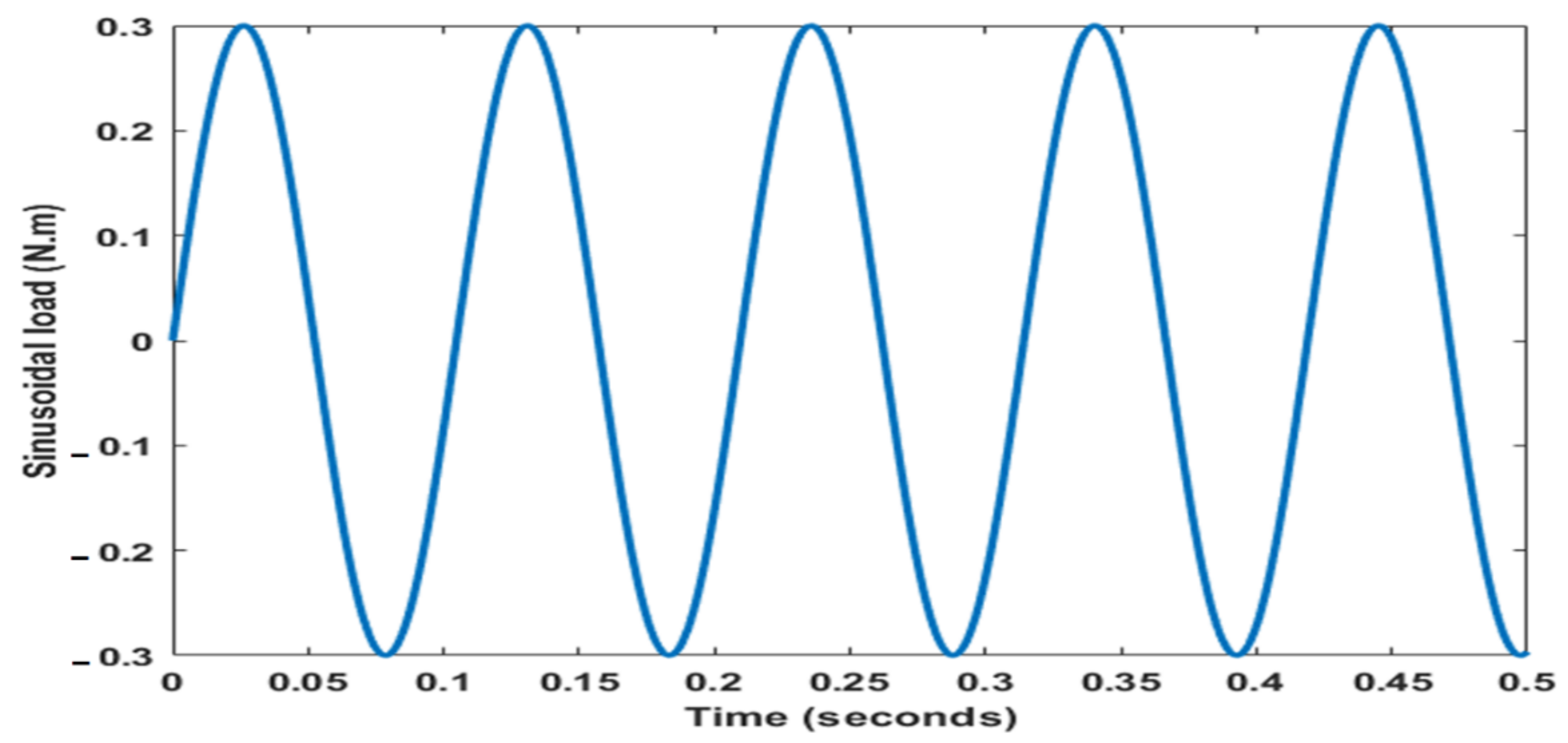
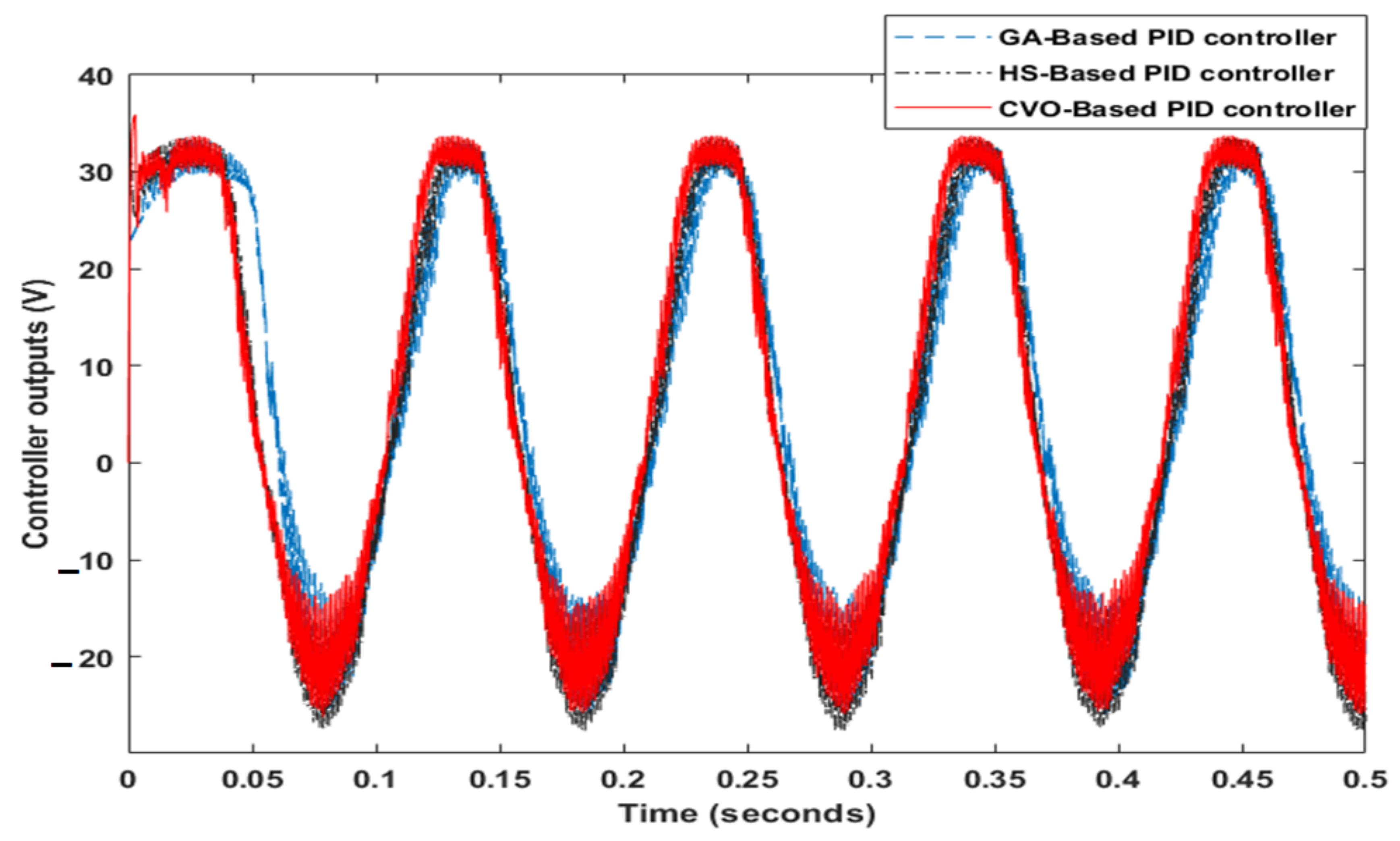
4.2. Speed Regulation at Sinusoidal Load Case
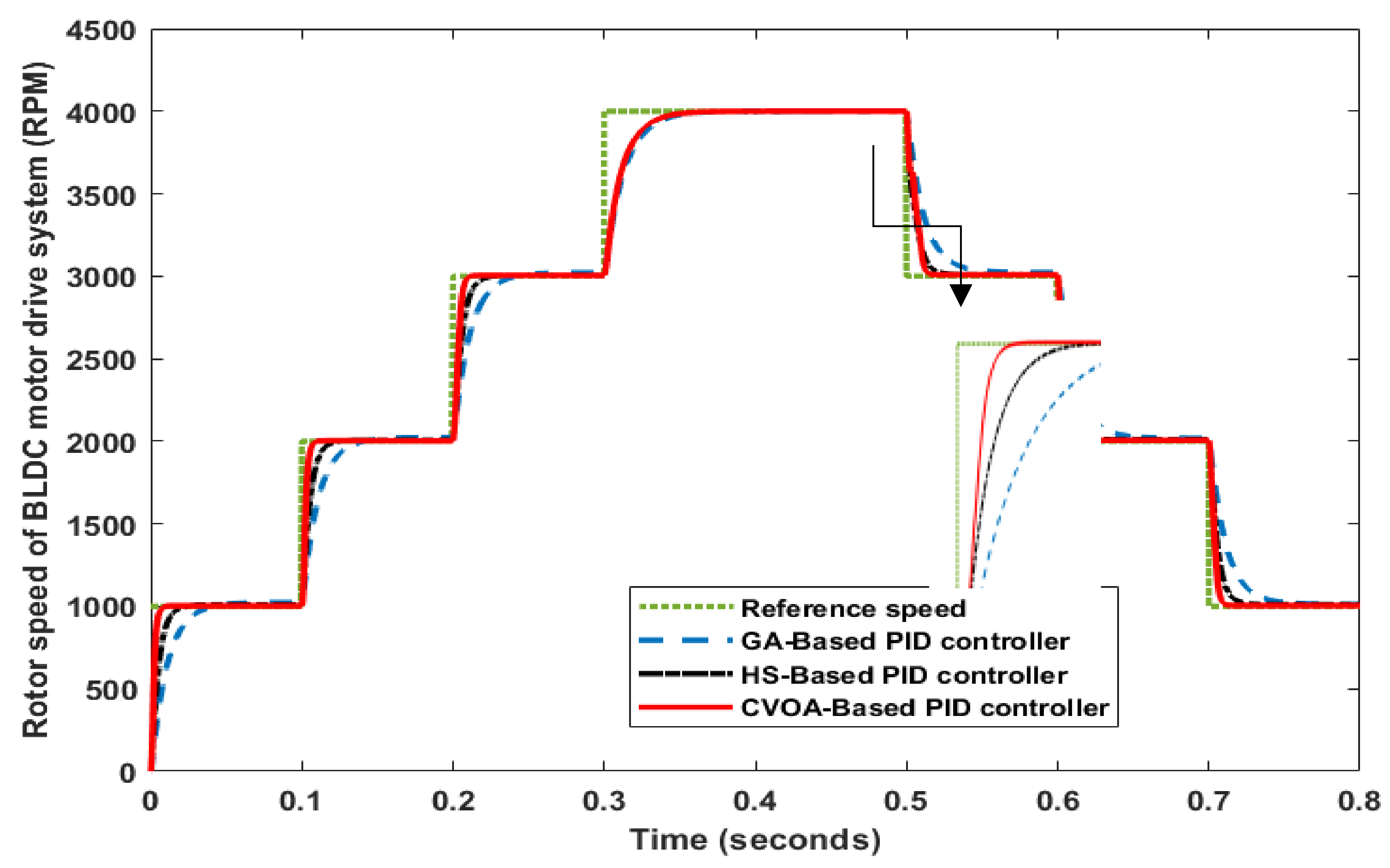
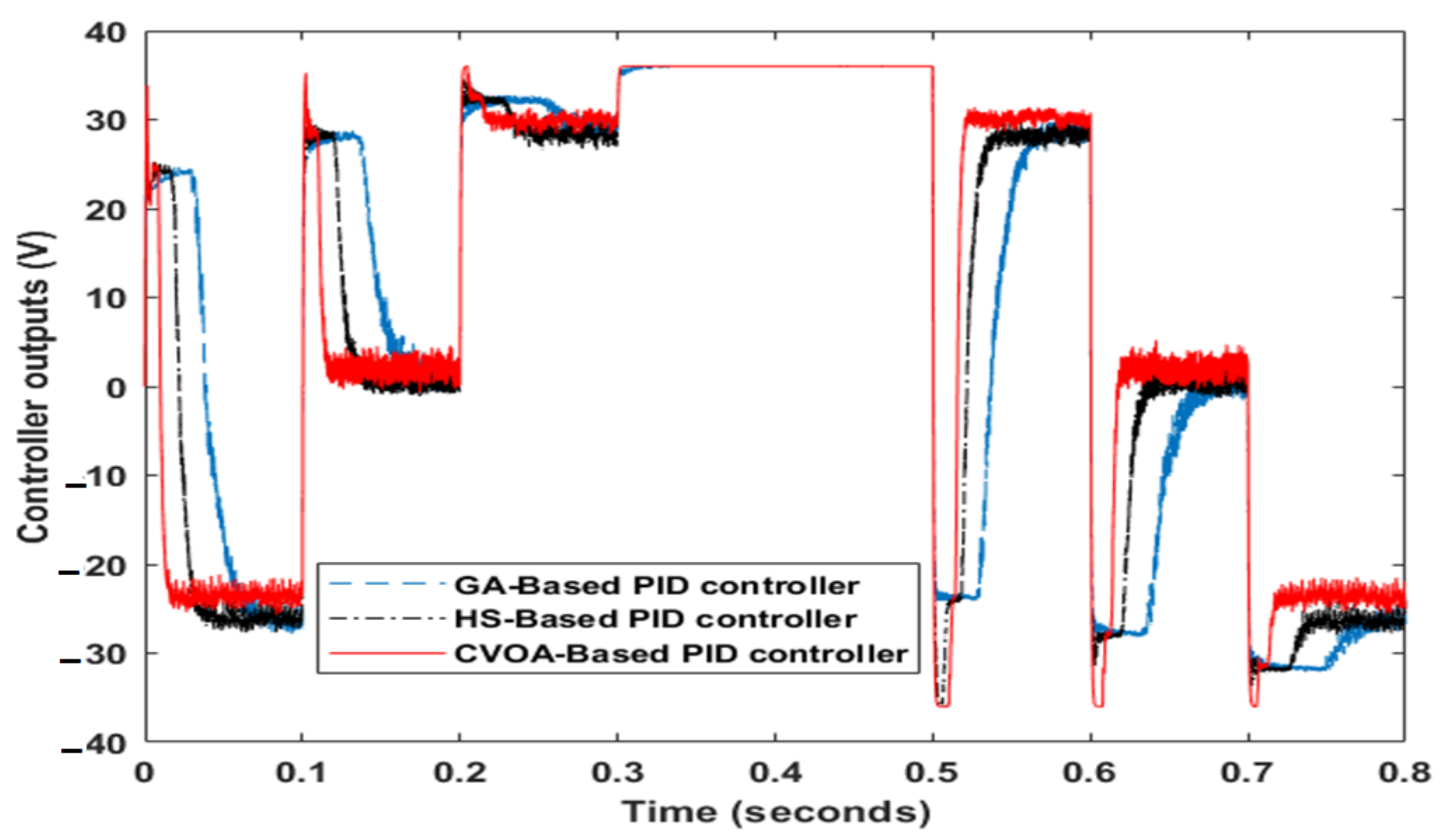
4.3. Speed Tracking Case
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Kumar, S.D. Modeling of brushless dc drive using genetic algorithm based tuning of pid con-troller. IJEEER 2014, 4, 113–126. [Google Scholar]
- Chen, S.-C.; Kuo, C.-Y. Design and implementation of double-integral sliding-mode controller for brushless direct current motor speed control. Adv. Mech. Eng. 2017, 9, 1–9. [Google Scholar] [CrossRef]
- Kota, R.T.U.K. Tuning of PID Controller for A Linear Brushless DC Motor using Swarm Intelligence Technique Pooja Sharma, Rajeev Gupta. J. Eng. Res. Appl. 2014, 4, 125–128. [Google Scholar]
- Navatakke, R.R.; Bichagatti, J. Optimal PID control of a brushless DC motor using PSOtechnique. IOSR J. Electr. Electron. Eng. 2015, 10, 13–17. [Google Scholar] [CrossRef]
- Selvakumar, P.; Kannadasan, T. Comparative Study of Intelligent Controllers for Brushless. Dc Motor. J. Theor. Appl. Inf. Technol. 2014, 63, 431–436. [Google Scholar]
- Reddy, C.S.R.; Kalavathi, M.S. Performance Analysis of BLDC Motor Drive using New Simulation Model with Fuzzy and ANFIS Speed Controllers. Glob. J. Res. Eng. F Electr. Electron. Eng. 2014, 14, 55697187. [Google Scholar]
- Reddy, P.N. Modeling and Analysis of PI Controller Based Speed Control of Brushless DC Motor Drive. IJESRT 2013, 2, 2226–2231. [Google Scholar]
- Purwadi, A.; Dozeno, J.; Heryana, N. Testing Performance of 10 kW BLDC Motor and LiFePO4 Battery on ITB-1 Electric Car Prototype. Procedia Technol. 2013, 11, 1074–1082. [Google Scholar] [CrossRef][Green Version]
- Shamseldin, M.; Eissa, M.A.; EL-Samahy, A. Practical Implementation of GA-Based PID Controller for Brushless DC Motor. In Proceedings of the 17th International Middle East Power System Conference (MEPCON’15), Mansoura University, Mansoura, Egypt, 15–17 December 2015. [Google Scholar]
- Bingul, Z.; Karahan, O. Comparison of PID and FOPID controllers tuned by PSO and ABC algorithms for unstable and integrating systems with time delay. Optim. Control Appl. Methods 2018, 39, 1431–1450. [Google Scholar] [CrossRef]
- Sun, C.; Gong, G.; Wang, F.; Yang, H.; Ouyang, X. Single neuron adaptive PID control for hydro-viscous drive clutch. In Proceedings of the 2016 12th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications (MESA), Auckland, New Zealand, 29–31 August 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Shamseldin, M.A.; Sallam, M.; Bassiuny, A.M.; Mohamed, A.G. LabVIEW implementation of an enhanced nonlinear PID controller based on harmony search for one-stage servomechanism system. J. Comput. Appl. Res. Mech. Eng. 2020, 10, 111–123. [Google Scholar] [CrossRef]
- Shamseldin, M.A.; Sallam, M.; Bassiuny, A.M.; Abdel, A. A new model reference self-tuning fractional order PD control for one stage servomechanism system. WSEAS Trans. Syst. Control 2019, 14, 8–18. [Google Scholar]
- Shamseldin, M.A.; Sallam, M.; Bassiuny, A.M.; Ghany, A.M.A. Real-time implementation of an enhanced nonlinear PID controller based on harmony search for one-stage servomechanism system. J. Mech. Eng. Sci. 2018, 12, 4161–4179. [Google Scholar] [CrossRef]
- Pillai, B.; Nair, K.T. Intelligent adaptive controller for DC servo motor position control in LabVIEW. In Proceedings of the 2017 International Conference on Intelligent Computing, Instrumentation and Control Technologies (ICICICT), Kannur, India, 6–7 July 2017; pp. 981–985. [Google Scholar] [CrossRef]
- Shamseldin, M.; Abdel Ghany, M.; Hendawey, Y. Optimal Nonlinear PID Speed Control Based on Harmony Search for An Electric Vehicle Optimal Nonlinear PID Speed Control Based on Harmony Search for An Electric. Future Eng. J. 2021, 2, 4. [Google Scholar]
- Wang, C.; Quan, L.; Jiao, Z.; Zhang, S. Nonlinear Adaptive Control of Hydraulic System With Observing and Compensating Mismatching Uncertainties. IEEE Trans. Control Syst. Technol. 2017, 26, 927–938. [Google Scholar] [CrossRef]
- Dinc, A.; Otkur, M. Optimization of Electric Vehicle Battery Size and Reduction Ratio Using Genetic Algorithm. In Proceedings of the 2020 11th International Conference on Mechanical and Aerospace Engineering (ICMAE), Athens, Greece, 14–17 July 2020; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2020; pp. 281–285. [Google Scholar]
- Alanazi, S.A.; Kamruzzaman, M.M.; Alruwaili, M.; Alshammari, N.; Alqahtani, S.A.; Karime, A. Measuring and Preventing COVID-19 Using the SIR Model and Machine Learning in Smart Health Care. J. Healthc. Eng. 2020, 2020, 1–12. [Google Scholar] [CrossRef]
- Kozioł, K.; Stanisławski, R.; Bialic, G. Fractional-Order SIR Epidemic Model for Transmission Prediction of COVID-19 Disease. Appl. Sci. 2020, 10, 8316. [Google Scholar] [CrossRef]
- Águila-León, J.; Chiñas-Palacios, C.D.; Vargas-Salgado, C.; Hurtado-Perez, E.; García, E.X. Optimal PID Pa-rameters Tunning for a DC-DC Boost Converter. In Proceedings of the 2020 IEEE Conference on Technologies for Sustainability (SusTech) Optimal, Las Vegas, NV, USA, 24–25 April 2020; pp. 40–45. [Google Scholar]
- Kumar, M.; Chaursiya, K. Position control of brushless DC motor using harmony search algorithm optimization technique. In Proceedings of the 2017 International conference of Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 20–22 April 2017; Volume 1, pp. 754–757. [Google Scholar]
- Mukhtar, A.; Tayal, V.K.; Singh, H. PSO Optimized PID Controller Design for the Process Liquid Level Control. In Proceedings of the 2019 3rd International Conference on Recent Developments in Control, Automation & Power Engineering (RDCAPE), Noida, India, 10–11 October 2019; pp. 590–593. [Google Scholar] [CrossRef]
- Bennaoui, A.; Saadi, S.; Ameur, A. Performance Comparison of MFO and PSO for Optimal Tuning the fractional order fuzzy PID Controller for A DC-DC Boost Converter. In Proceedings of the 2020 International Conference on Electrical Engineering (ICEE), Istanbul, Turkey, 25–27 September 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Yang, L.; Zhu, Z.Q.; Shuang, B.; Bin, H. Adaptive Threshold Correction Strategy for Sensorless High-Speed Brushless DC Drives Considering Zero-Crossing-Point Deviation. IEEE Trans. Ind. Electron. 2019, 67, 5246–5257. [Google Scholar] [CrossRef]
- Maharajan, M.P.; Xavier, S.A.E. Design of Speed Control and Reduction of Torque Ripple Factor in BLdc Motor Using Spider Based Controller. IEEE Trans. Power Electron. 2019, 34, 7826–7837. [Google Scholar] [CrossRef]
- Gaurav, A.; Gaur, A. Modelling of Hybrid Electric Vehicle Charger and Study the Simulation Results. In Proceedings of the 2020 International Conference on Emerging Frontiers in Electrical and Electronic Technologies (ICEFEET), Aarhus, Denmark, 10–11 July 2020; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2020; pp. 1–6. [Google Scholar]
- Shamseldin, M.A.; El-Samahy, A.A.; Ghany, A. Different techniques of self-tuning FOPID control for Brushless DC Motor. In Proceedings of the 2016 Eighteenth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 27–29 December 2016; pp. 342–347. [Google Scholar]
- Nasri, M.; Nezamabadi-Pour, H.; Maghfoori, M. A PSO-Based Optimum Design of PID Controller for a Linear Brushless DC Motor. Int. J. Electr. Robot. Electron. Commun. Eng. 2007, 1, 184–188. [Google Scholar]
- Deraz, S.A. Genetic Tuned PID Controller Based Speed Control of DC Motor Drive. Int. J. Eng. Trends Technol. 2014, 17, 88–93. [Google Scholar] [CrossRef]
- Omar, M.; Soliman, M.; Ghany, A.M.A.; Bendary, F. Optimal Tuning of PID Controllers for Hydrothermal Load Frequency Control Using Ant Colony Optimization. Int. J. Electr. Eng. Inform. 2013, 5, 348–360. [Google Scholar] [CrossRef]
- Kiran, S.R.; Amani, G. Load Frequency Control of a Two-Area Power System Using FOPID with Harmony Search Algorithm. Natl. Conf. Trends Eng. Technol. 2017, 6495, 12–17. [Google Scholar] [CrossRef]
- Omar, M.; Ebrahim, M.A.; Abdel Ghany, A.M.; Bendary, F. Reduced Size Harmony Search Algorithm for Optimization. J. Electr. Eng. 2016, 1, 1–8. [Google Scholar]
- Omar, M.; Ebrahim, M.A.; Ghany, A.M.A.; Bendary, F. Tuning of PID Controller for Load Frequency Control Problem via Harmony Search Algorithm. Indones. J. Electr. Eng. Comput. Sci. 2016, 1, 255–263. [Google Scholar] [CrossRef]
- Banu, U.S.; Lakshmanaprabu, S.K. Multivariable Centralized Fractional Order PID Controller tuned using Harmony search Algorithm for Two Interacting Conical Tank Process. In Proceedings of the SAI Intelligent Systems Conference, London, UK, 10–11 November 2015; pp. 320–327. [Google Scholar]
- Omar, M.; Ghany, A.M.A.; Bendary, F. Harmony Search based PID for Multi Area Load Frequency Control Including Boiler Dynamics and Nonlinearities. WSEAS Trans. Circuits Syst. 2015, 14, 407–414. [Google Scholar]
- Martínez-Álvarez, F.; Asencio-Cortés, G.; Torres, J.F.; Gutiérrez-Avilés, D.; Melgar-García, L.; Pérez-Chacón, R.; Rubio-Escudero, C.; Riquelme, J.C.; Troncoso, A. Coronavirus Optimization Algorithm: A Bioinspired Metaheuristic Based on the COVID-19 Propagation Model. Big Data 2020, 8, 308–322. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rating | Symbol | Value | Units |
|---|---|---|---|
| DC resistance | R | 0.57 | Ω |
| Inductance | L | 1.5 | mH |
| Torque constant | KT | 0.082 | N.m/A |
| No. of Poles | P | 4 | |
| Rated torque | Tp | 0.42 | N.m |
| Rated Voltage | V | 36 | V |
| Rotor Inertia | J | 23 × 10−6 | Kg.m2 |
| Friction coefficient | Bv | 0.0000735 | N.M. S |
| Rated Speed | ω | 4000 | RPM |
| Rated current | I | 5 | A |
| No. | CVOA Parameter | Symbol | Value |
|---|---|---|---|
| 1 | Probability of Death | PDIE | random value from 0 to 1 |
| 2 | Death Rate | DR | random value from 0 to 1 |
| 3 | Spreading Rate | SR | random value from 0 to 0.5 |
| 4 | Super Spreading Rate | SRR | random value from 0.5 to 1 |
| 5 | Probability of travel | Pt | random binary value 0 or 1 |
| 6 | Lower boundary | LX | [0.1, 0.1, 0.1] |
| 7 | Upper boundary | UX | [100, 100, 10] |
| Control Technique | Kp | Ki | Kd |
|---|---|---|---|
| GA-based PID controller | 40.325 | 50.23 | 0.401 |
| HS-based PID controller | 90.564 | 66.365 | 0.352 |
| CVOA-based PID controller | 85.144 | 70.365 | 0.121 |
| Control Technique | Rise Time (s) | Settling Time (s) | Overshoot (%) |
|---|---|---|---|
| GA-based PID controller | 0.0234 | 0.0417 | 0.0089 |
| HS-based PID controller | 0.0104 | 0.0191 | 0.0159 |
| CVOA-based PID controller | 0.0042 | 0.0079 | 0.0511 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shamseldin, M.A. Optimal Coronavirus Optimization Algorithm Based PID Controller for High Performance Brushless DC Motor. Algorithms 2021, 14, 193. https://doi.org/10.3390/a14070193
Shamseldin MA. Optimal Coronavirus Optimization Algorithm Based PID Controller for High Performance Brushless DC Motor. Algorithms. 2021; 14(7):193. https://doi.org/10.3390/a14070193
Chicago/Turabian StyleShamseldin, Mohamed A. 2021. "Optimal Coronavirus Optimization Algorithm Based PID Controller for High Performance Brushless DC Motor" Algorithms 14, no. 7: 193. https://doi.org/10.3390/a14070193
APA StyleShamseldin, M. A. (2021). Optimal Coronavirus Optimization Algorithm Based PID Controller for High Performance Brushless DC Motor. Algorithms, 14(7), 193. https://doi.org/10.3390/a14070193