
Research on Optimization of Multi-Objective Regional Public Transportation Scheduling


Abstract
1. Introduction
2. Literature Review
3. The Regional Public Transportation Scheduling Model
- (1)
- The buses operating on each line are considered to be full-range buses.
- (2)
- There are no overtaking, stopovers and U-turns.
3.1. Notations
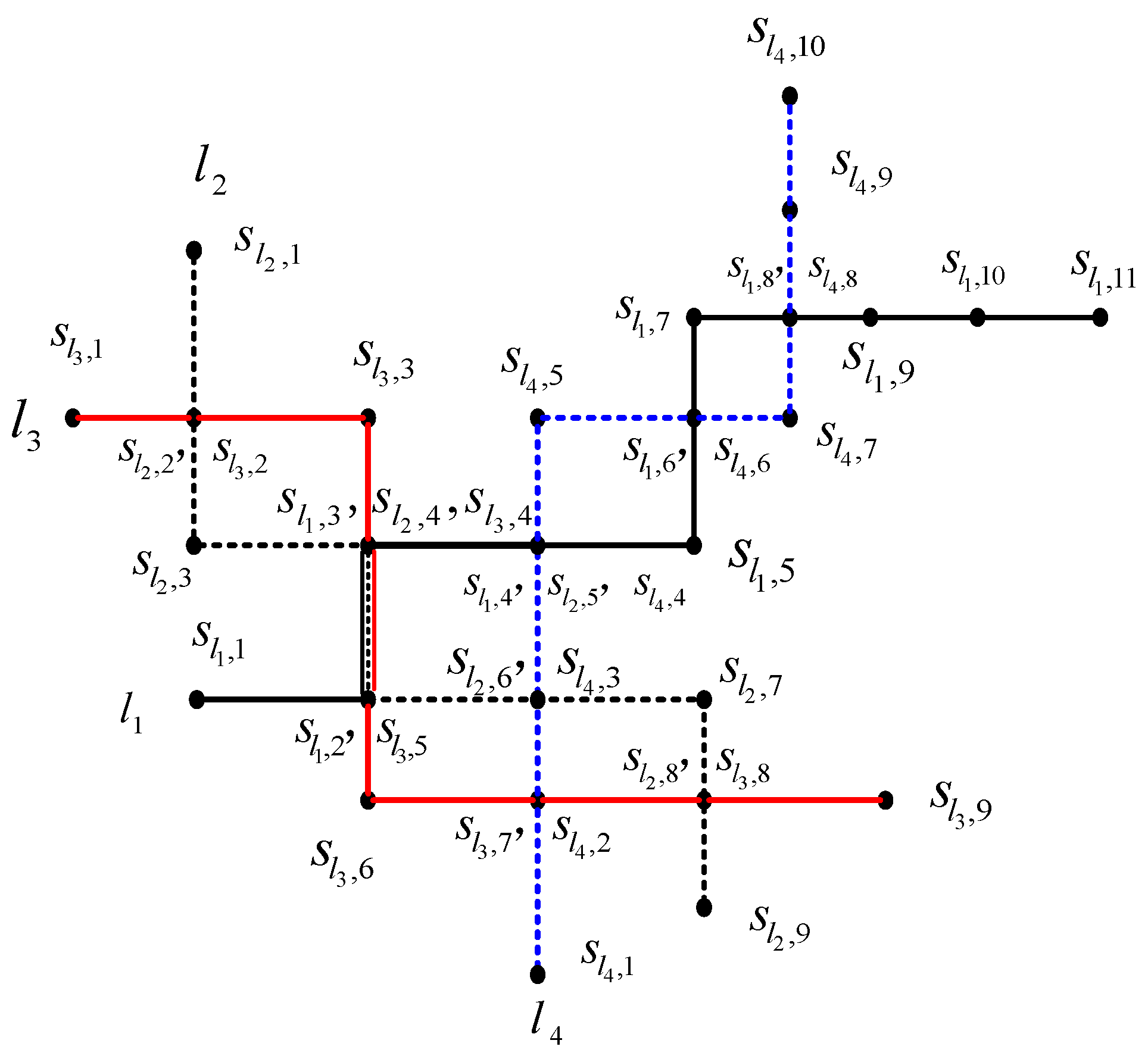
3.2. Operation Analysis
3.3. The Optimization Model
4. Solution Algorithms
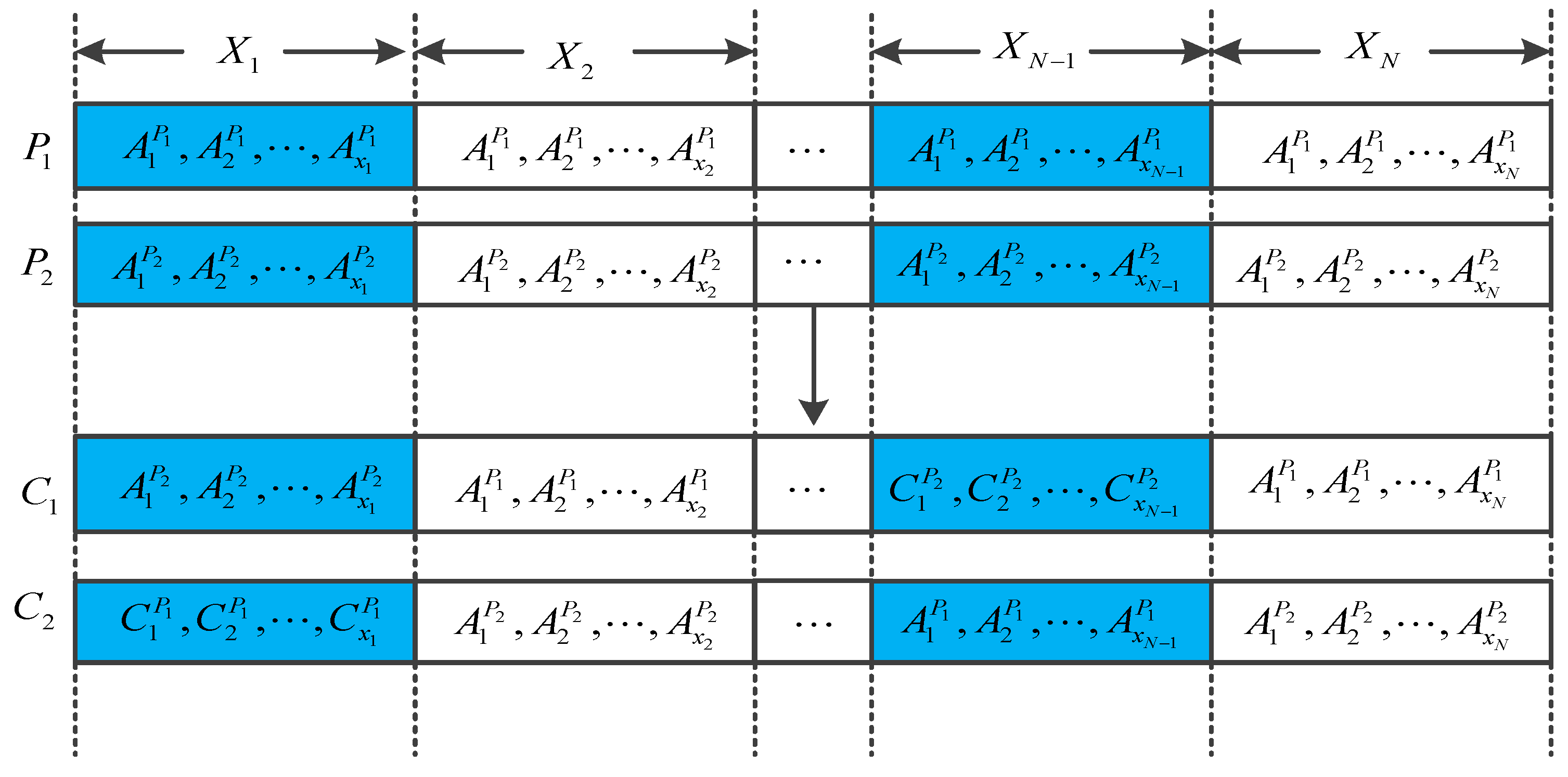
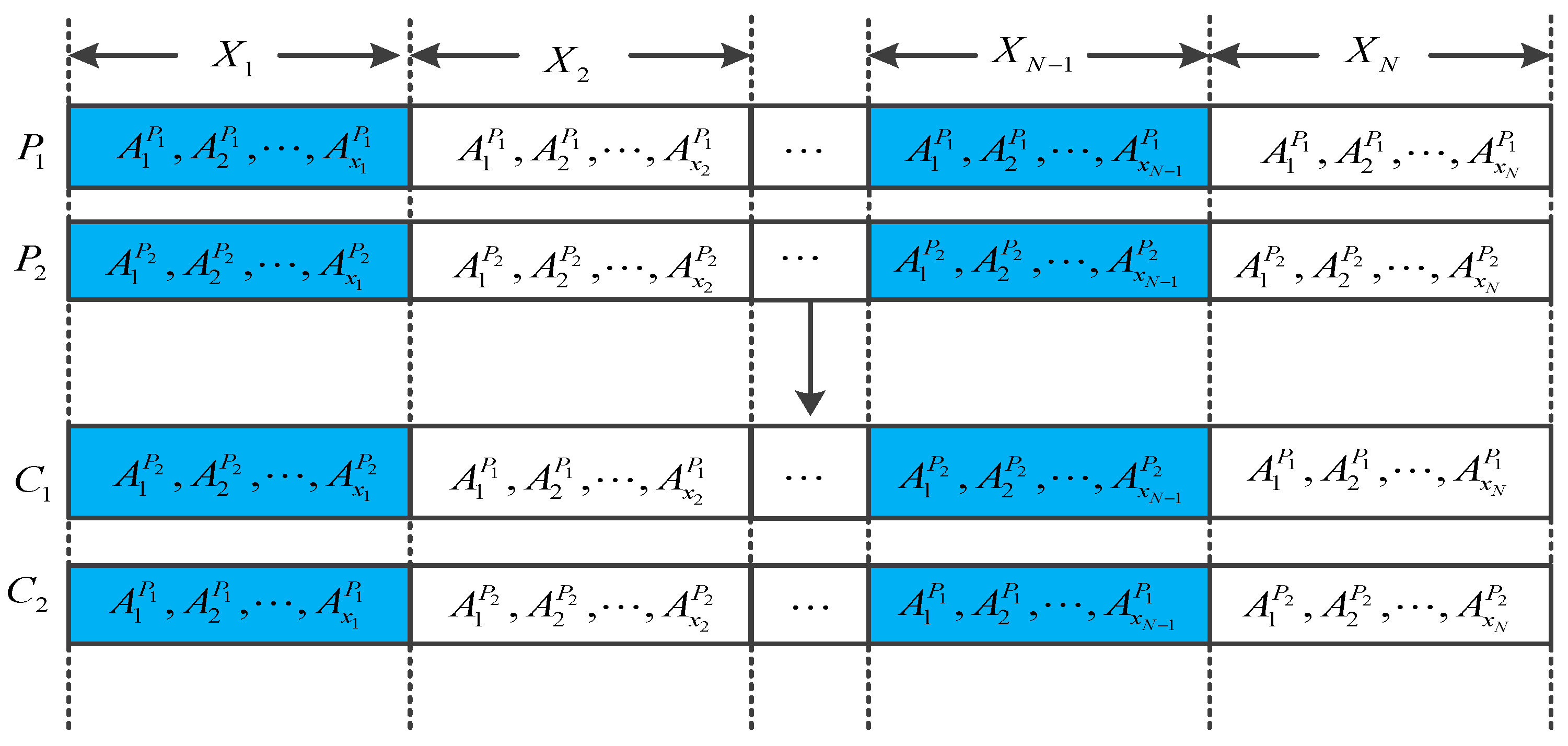
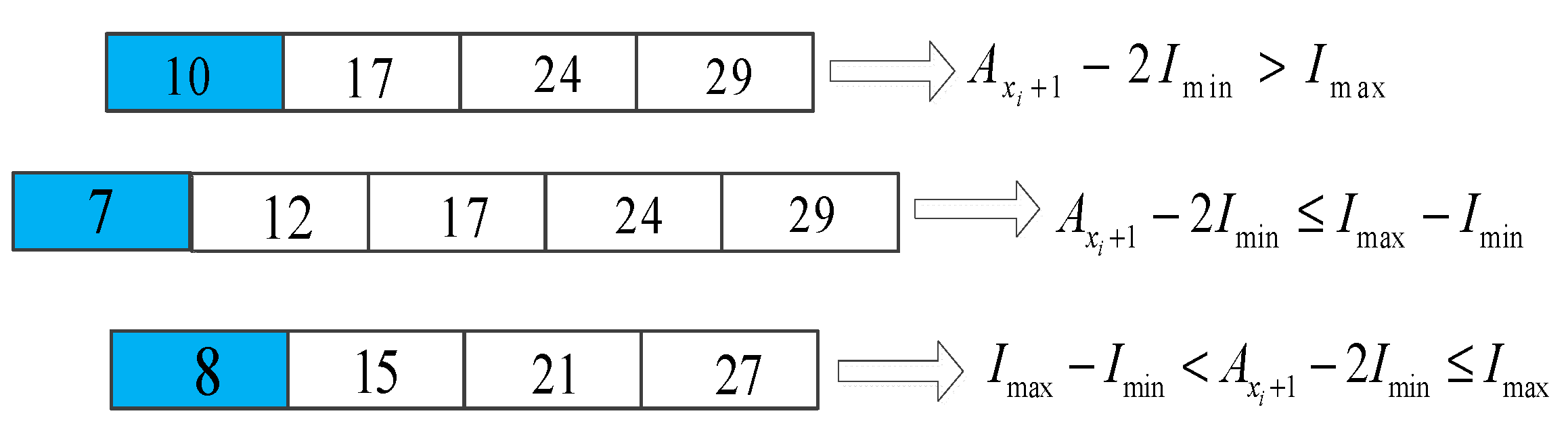
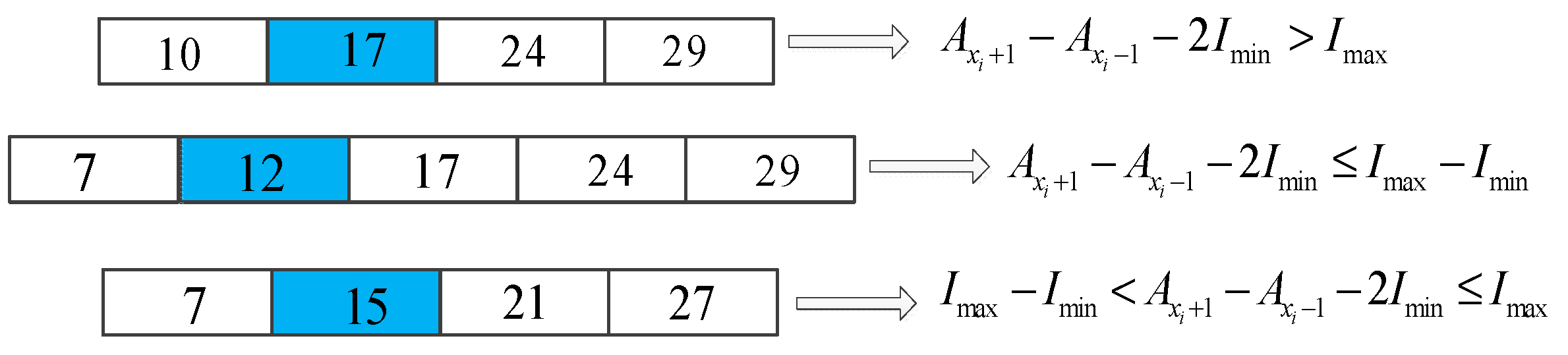
4.1. The NSGA-II Algorithm
4.2. Obtain Satisfactory Scheme from Pareto Solution Set
5. Example Analysis
6. Conclusions
- (1)
- Considering the uncertainty of the running time to design the regional public transport scheduling model and algorithm.
- (2)
- Considering other factors, such as multiple types of buses, energy consumption, depots capacities, to the regional bus scheduling problem is studied, to research on the regional public transportation scheduling.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Beijing Transport Institute: Analysis on the Characteristics of Beijing Residents’ Public Transport Travel. Available online: https://mp.weixin.qq.com/s/oeK1d8iaqrRN8PS39smfyw (accessed on 5 June 2019).
- Fu, J.G. The Key Technologies research to improve transit trip rate. Urban Dev. Stud. 2014, 21, 79–83. [Google Scholar]
- Guo, Z.; Wilson, N.H.M. Assessing the cost of transfer inconvenience in public transport systems: A case study of the London underground. Transp. Res. Part A Policy Pract. 2011, 45, 91–104. [Google Scholar] [CrossRef]
- Wei, M.; Chen, X.W.; Sun, B. Multi-objective single line transit mixed scheduling model considering express bus Service. J. Transp. Syst. Eng. Inf. Technol. 2015, 15, 169–174. [Google Scholar]
- Yang, X.F.; Liu, L.F. A Multi-objective bus rapid transit energy saving dispatching optimization considering multiple types of vehicles. IEEE Access 2020, 8, 79459–79471. [Google Scholar] [CrossRef]
- Liebchen, C.; Stiller, S. Delay resistant timetabling. Public Transp. 2009, 1, 55–72. [Google Scholar] [CrossRef]
- Liu, Z.G.; Shen, J.S. Regional bus operation bi-level programming model integrating timetabling and vehicle scheduling. Syst. Eng. Theory Pract. 2007, 11, 135–141. [Google Scholar] [CrossRef]
- Ceder, A.; Golany, B.; Tal, O. Creating bus timetables with maximal synchronization. Transp. Res. Part A Policy Pract. 2001, 35, 913–928. [Google Scholar] [CrossRef]
- Ibarra-Rojas, O.J.; Rios-Solis, Y.A. Synchronization of bus timetabling. Transp. Res. Part B Methods 2012, 46, 599–614. [Google Scholar] [CrossRef]
- Eranki, A. A Model to Create Bus Timetables to Attain Maximum Synchronization Considering Waiting Times at Transfer Stops. Master’s Thesis, University of South Florida, Tampa, FL, USA, 2004. [Google Scholar]
- Wei, M.; Chen, X.W.; Sun, B. A model and an algorithm of schedule coordination for multi-mode regional bus transit. J. Highw. Transp. Res. Dev. 2015, 32, 136–142. [Google Scholar]
- Liu, Z.G.; Shen, J.S.; Wang, H.X.; Yang, W. Regional public transportation timetabling model with synchronization. J. Transp. Syst. Eng. Inf. Technol. 2007, 7, 109–113. [Google Scholar]
- Nesheli, M.M.; Ceder, A. Optimal combinations of selected tactics for public-transport transfer synchronization. Transp. Res. Part C Emerg. Technol. 2014, 48, 491–504. [Google Scholar] [CrossRef]
- Hu, B.Y.; Zhao, H.; Wang, D.X. Synchronous transfer model of urban public transport and rural passenger transport. J. Highw. Transp. Res. Dev. 2019, 13, 144–150. [Google Scholar]
- Wagale, M.; Singh, A.P.; Sarkar, A.K.; Arkatkar, S. Real-time optimal bus scheduling for a city using a DTR model. Procedia Soc. Behav. Sci. 2013, 104, 845–854. [Google Scholar] [CrossRef]
- Ibeas, A.; Alonso, B.; Dell’Olio, L.; Moura, J.L. Bus size and headways optimization model considering elastic demand. J. Transp. Eng. 2014, 140, 370–380. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, D.X.; Hu, L.; Yang, Y.; Lee, L.H. A data-driven and optimal bus scheduling model with time-dependent traffic and demand. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2443–2452. [Google Scholar] [CrossRef]
- Boyer, V.; Ibarra-Rojas, O.J.; Ríos-Solís, Y.Á. Vehicle and crew scheduling for flexible bus transportation systems. Transp. Res. Part B Meth. 2018, 112, 216–229. [Google Scholar] [CrossRef]
- Kumar, B.A.; Prasath, G.H.; Vanajakshi, L. Dynamic bus scheduling based on real-time demand and travel time. Int. J. Civ. Eng. 2019, 17, 1481–1489. [Google Scholar] [CrossRef]
- Kang, L.J.; Chen, S.K.; Meng, Q. Bus and driver scheduling with mealtime windows for a single public bus route. Transp. Res. 2019, 101, 145–160. [Google Scholar] [CrossRef]
- Burdett, R.L. Multi-objective models and techniques for analysing the absolute capacity of railway networks. Eur. J. Oper. Res. 2015, 245, 489–505. [Google Scholar] [CrossRef]
- Bevrani, B.; Burdett, R.; Bhaskar, A.; Yarlagadda, P.K.D.V. A multi-criteria multi-commodity flow model for analysing transportation networks. Oper. Res. Perspect. 2020, 7, 100159. [Google Scholar] [CrossRef]
- Bevrani, B.; Burdett, R.L.; Yarlagadda, P.K.D.V. A capacity assessment approach for multi-modal transportation systems. Eur. J. Oper. Res. 2017, 263, 864–878. [Google Scholar] [CrossRef]
- Ghaderi, A.; Burdett, R.L. An integrated location and routing approach for transporting hazardous materials in a bi-modal transportation network. Transp. Res. Part E Logist. Transp. Rev. 2019, 127, 49–65. [Google Scholar] [CrossRef]
- Larsen, O.I.; Sunde, Ø. Waiting time and the role and value of information in scheduled transport. Res. Transp. Econ. 2008, 23, 41–52. [Google Scholar] [CrossRef]
- Xiang, W. A multi-objective ACO for operating room scheduling optimization. Nat. Comput. 2017, 16, 607–617. [Google Scholar] [CrossRef]
- Dulebenets, M.A.; Pasha, J.; Kavoosi, M.; Abioye, O.F.; Ozguven, E.E.; Moses, R.; Boot, W.R.; Sando, T. Multiobjective optimization model for emergency evacuation planning in geographical locations with vulnerable population groups. J. Manag. Eng. 2020, 36, 04019043. [Google Scholar] [CrossRef]
- Han, Y.Y.; Li, J.Q.; Sang, H.Y.; Liu, Y.P.; Gao, K.Z.; Pan, Q.K. Discrete evolutionary multi-objective optimization for energy-efficient blocking flow shop scheduling with setup time. Appl. Soft. Comput. 2020, 93, 106343. [Google Scholar] [CrossRef]
- Li, Y.Y.; Wang, S.Q.; Duan, X.B.; Liu, S.J.; Liu, J.P.; Hu, S. Multi-objective energy management for Atkinson cycle engine and series hybrid electric vehicle based on evolutionary NSGA-II algorithm using digital twins. Energy Convers. Manag. 2021, 230, 113788. [Google Scholar] [CrossRef]
- Liu, J.; Ma, B.; Zhao, H.B. Combustion parameters optimization of a diesel/natural gas dual fuel engine using genetic algorithm. Fuel 2020, 260, 116365. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S. A fast and elitist multi-objective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Luo, J.; Chen, S.Y.; Sun, X.; Zhu, Y.Y.; Zeng, J.X.; Chen, G.P. Analysis of city centrality based on entropy weight TOPSIS and population mobility: A case study of cities in the Yangtze River Economic Belt. J. Geogr. Sci. 2020, 30, 515–534. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transfer Station Pair | Transfer Proportion | Transfer Station | Transfer Proportion |
|---|---|---|---|
| 0.35 | 0.5 | ||
| 0.45 | 0.25 | ||
| 0.35 | 0.15 | ||
| 0.05 | 0.2 | ||
| 0.4 | 0.3 | ||
| 0.45 | 0.05 | ||
| 0.35 |
| 2 | 1 | 0 | 3 | 2 | 0.05 | 3.5 | 1 | 0.35 | ||||||
| 3.5 | 1 | 0.05 | 3 | 2 | 0.25 | 2 | 2 | 0.4 | ||||||
| 2.5 | 2 | 0.05 | 2.5 | 2 | 0.2 | 2.5 | 0 | 1 | ||||||
| 3.5 | 3 | 0.1 | 3 | 2 | 0.25 | 1.5 | 1 | 0 | ||||||
| 3 | 2 | 0.25 | 3 | 1 | 0.25 | 2 | 1 | 0.05 | ||||||
| 3.5 | 3 | 0.2 | 4.5 | 1 | 0.4 | 2 | 2 | 0.35 | ||||||
| 4 | 2 | 0.2 | 3 | 0 | 1 | 4 | 2 | 0.25 | ||||||
| 3 | 1 | 0.25 | 2 | 1 | 0 | 3 | 3 | 0.3 | ||||||
| 4.5 | 1 | 0.35 | 2 | 2 | 0.2 | 3 | 2 | 0.25 | ||||||
| 3 | 1 | 0.25 | 3.5 | 2 | 0.15 | 2.5 | 1 | 0.2 | ||||||
| 3 | 0 | 1 | 2.5 | 1 | 0.25 | 3 | 1 | 0.3 | ||||||
| 2 | 1 | 0 | 2.5 | 2 | 0.2 | 2 | 1 | 0.35 | ||||||
| 2.5 | 1 | 0.05 | 3 | 3 | 0.25 | 2 | 0 | 1 |
| Solution No. | Weighted Objective Value | Solution No. | Weighted Objective Value | ||||
|---|---|---|---|---|---|---|---|
| 1 | 3910.78 | 1.5967 | 1 | 26 | 2749.43 | 1.3955 | 0.1732 |
| 2 | 2578.71 | 1.3270 | 0 | 27 | 2970.66 | 1.4790 | 0.3906 |
| 3 | 2589.56 | 1.3571 | 0.0451 | 28 | 3491.44 | 1.5538 | 0.741 |
| 4 | 3497.20 | 1.5612 | 0.7535 | 29 | 2966.80 | 1.4757 | 0.3843 |
| 5 | 2580.83 | 1.3287 | 0.0032 | 30 | 3691.16 | 1.5744 | 0.8646 |
| 6 | 3795.25 | 1.5852 | 0.9292 | 31 | 3437.34 | 1.5525 | 0.7131 |
| 7 | 2641.18 | 1.3760 | 0.095 | 32 | 3223.69 | 1.5172 | 0.5633 |
| 8 | 2609.90 | 1.3619 | 0.0613 | 33 | 3756.70 | 1.5768 | 0.8994 |
| 9 | 2955.62 | 1.4616 | 0.3602 | 34 | 3380.22 | 1.5417 | 0.6713 |
| 10 | 3613.80 | 1.5638 | 0.8132 | 35 | 2898.54 | 1.4475 | 0.314 |
| 11 | 3091.34 | 1.5025 | 0.48 | 36 | 3869.82 | 1.5920 | 0.9741 |
| 12 | 2718.75 | 1.3875 | 0.1477 | 37 | 2686.30 | 1.3821 | 0.125 |
| 13 | 3126.04 | 1.5083 | 0.5044 | 38 | 2813.10 | 1.4142 | 0.2287 |
| 14 | 3084.49 | 1.4888 | 0.4586 | 39 | 2764.92 | 1.3994 | 0.1859 |
| 15 | 2934.42 | 1.4532 | 0.3388 | 40 | 2825.46 | 1.4202 | 0.2426 |
| 16 | 3271.71 | 1.5290 | 0.602 | 41 | 3436.29 | 1.5454 | 0.7032 |
| 17 | 2868.64 | 1.4271 | 0.2726 | 42 | 3760.29 | 1.5786 | 0.9035 |
| 18 | 3330.26 | 1.5399 | 0.6448 | 43 | 3175.89 | 1.5114 | 0.5325 |
| 19 | 3688.07 | 1.5708 | 0.8582 | 44 | 3044.15 | 1.4863 | 0.4357 |
| 20 | 3282.35 | 1.5371 | 0.618 | 45 | 2777.11 | 1.4064 | 0.2011 |
| 21 | 3041.99 | 1.4813 | 0.4281 | 46 | 2853.55 | 1.4225 | 0.2591 |
| 22 | 3616.53 | 1.5653 | 0.8166 | 47 | 3177.62 | 1.5141 | 0.5369 |
| 23 | 2884.80 | 1.4407 | 0.2984 | 48 | 2677.38 | 1.3786 | 0.1161 |
| 24 | 3867.57 | 1.5880 | 0.9676 | 49 | 2793.91 | 1.4095 | 0.2132 |
| 25 | 3225.69 | 1.5231 | 0.572 | 50 | 3396.20 | 1.5444 | 0.6826 |
| Solution No. | Solution No. | ||||||
|---|---|---|---|---|---|---|---|
| 1 | 0.6423 | 0.3577 | 0.3577 | 26 | 0.2793 | 0.5673 | 0.6701 |
| 2 | 0.3577 | 0.6423 | 0.6423 | 27 | 0.2452 | 0.4961 | 0.6693 |
| 3 | 0.3179 | 0.6383 | 0.6675 | 28 | 0.4437 | 0.3625 | 0.4496 |
| 4 | 0.4454 | 0.3691 | 0.4532 | 29 | 0.2465 | 0.4960 | 0.6680 |
| 5 | 0.3555 | 0.6413 | 0.6433 | 30 | 0.5372 | 0.3449 | 0.3910 |
| 6 | 0.5868 | 0.3471 | 0.3717 | 31 | 0.4181 | 0.3762 | 0.4736 |
| 7 | 0.2944 | 0.6156 | 0.6765 | 32 | 0.3284 | 0.4164 | 0.5591 |
| 8 | 0.3118 | 0.6289 | 0.6686 | 33 | 0.5686 | 0.3396 | 0.3739 |
| 9 | 0.2552 | 0.4939 | 0.6593 | 34 | 0.3933 | 0.3829 | 0.4933 |
| 10 | 0.5010 | 0.3452 | 0.4079 | 35 | 0.2509 | 0.5136 | 0.6718 |
| 11 | 0.2769 | 0.4586 | 0.6235 | 36 | 0.6226 | 0.3521 | 0.3613 |
| 12 | 0.2856 | 0.5803 | 0.6702 | 37 | 0.2894 | 0.5949 | 0.6728 |
| 13 | 0.2888 | 0.4483 | 0.6083 | 38 | 0.2671 | 0.5418 | 0.6697 |
| 14 | 0.2827 | 0.4526 | 0.6155 | 39 | 0.2766 | 0.5608 | 0.6697 |
| 15 | 0.2563 | 0.4996 | 0.6610 | 40 | 0.2626 | 0.5377 | 0.6718 |
| 16 | 0.3460 | 0.4083 | 0.5413 | 41 | 0.4191 | 0.3691 | 0.4683 |
| 17 | 0.2649 | 0.5197 | 0.6624 | 42 | 0.5702 | 0.3416 | 0.3746 |
| 18 | 0.3701 | 0.3976 | 0.5179 | 43 | 0.3094 | 0.4306 | 0.5819 |
| 19 | 0.5360 | 0.3407 | 0.3886 | 44 | 0.2680 | 0.4682 | 0.6360 |
| 20 | 0.3483 | 0.4117 | 0.5417 | 45 | 0.2699 | 0.5567 | 0.6735 |
| 21 | 0.2708 | 0.4662 | 0.6326 | 46 | 0.2664 | 0.5252 | 0.6635 |
| 22 | 0.5021 | 0.3465 | 0.4083 | 47 | 0.3089 | 0.4319 | 0.5830 |
| 23 | 0.2542 | 0.5172 | 0.6705 | 48 | 0.2931 | 0.5986 | 0.6713 |
| 24 | 0.6215 | 0.3468 | 0.3581 | 49 | 0.2691 | 0.5495 | 0.6712 |
| 25 | 0.3269 | 0.4205 | 0.5626 | 50 | 0.4002 | 0.3805 | 0.4874 |
| Line No. | Departure Time | Waiting Time for Transfer Passengers (min) | Number of Passengers Who Not Achieved Easy Transfer | Full Load Rate | R |
|---|---|---|---|---|---|
| 1 | 7:04 7:12 7:21 | 238.0 | 46 | 0.867 | 0.697 |
| 2 | 7:07 7:14 7:22 7:26 | 139.0 | 39 | 0.620 | 0.714 |
| 3 | 7:10 7:19 7:25 | 215.0 | 29 | 0.683 | 0.684 |
| 4 | 7:08 7:13 7:17 7:22 7:27 | 117.4 | 11 | 0.493 | 0.712 |
| Departure Interval | The Total Waiting Cost of Passengers (Yuan) | The Comprehensive Service Ratio of Buses | Number of Passengers Who Not Achieved Easy Transfer |
|---|---|---|---|
| Optimal departure interval | 2641.18 | 1.3760 | 125 |
| 3 min | 3578.25 | 1.1383 | 387 |
| 4 min | 3610.00 | 1.2105 | 413 |
| 5 min | 3703.40 | 1.2802 | 443 |
| 6 min | 3889.94 | 1.3432 | 462 |
| 7 min | 3834.57 | 1.4177 | 510 |
| 8 min | 3717.22 | 1.4981 | 533 |
| 9 min | 4041.29 | 1.5253 | 548 |
| 10 min | 4433.40 | 1.5511 | 594 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Qi, Y. Research on Optimization of Multi-Objective Regional Public Transportation Scheduling. Algorithms 2021, 14, 108. https://doi.org/10.3390/a14040108
Yang X, Qi Y. Research on Optimization of Multi-Objective Regional Public Transportation Scheduling. Algorithms. 2021; 14(4):108. https://doi.org/10.3390/a14040108
Chicago/Turabian StyleYang, Xinfeng, and Yicheng Qi. 2021. "Research on Optimization of Multi-Objective Regional Public Transportation Scheduling" Algorithms 14, no. 4: 108. https://doi.org/10.3390/a14040108
APA StyleYang, X., & Qi, Y. (2021). Research on Optimization of Multi-Objective Regional Public Transportation Scheduling. Algorithms, 14(4), 108. https://doi.org/10.3390/a14040108