
Resource Allocation for Intelligent Reflecting Surfaces Assisted Federated Learning System with Imperfect CSI


Abstract
:1. Introduction
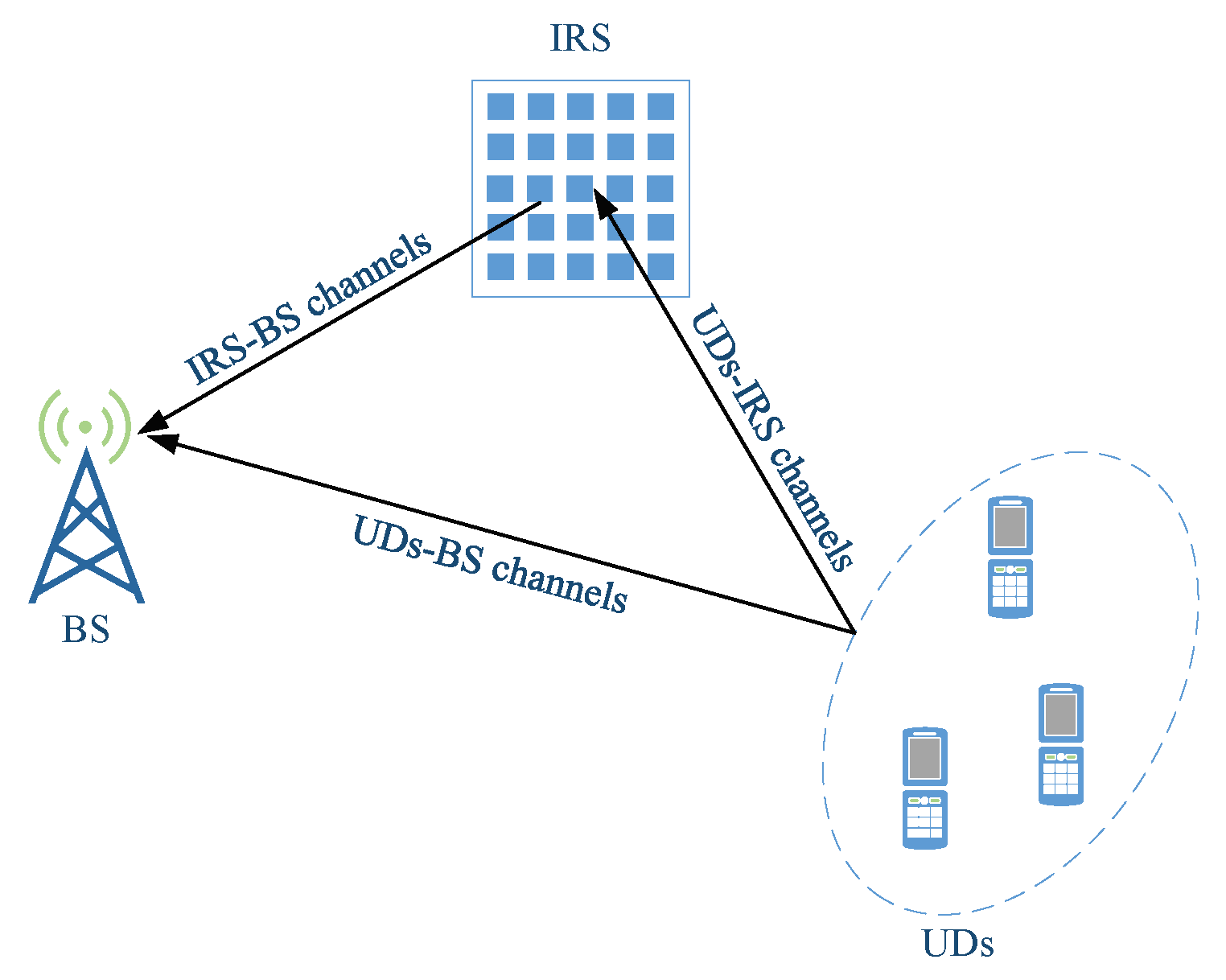
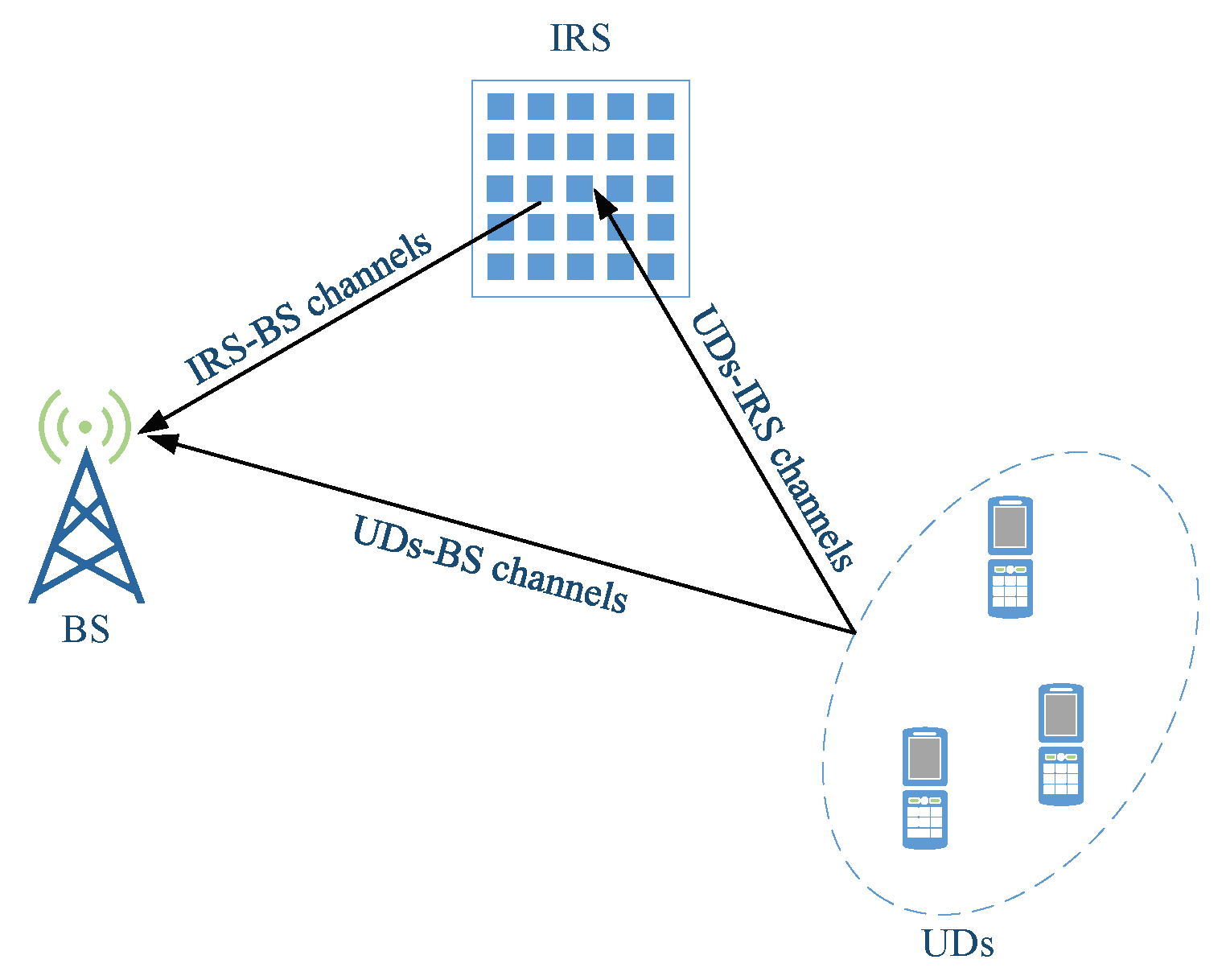
- In this paper, we study the FL system assisted by IRS under the imperfect CSI, and outage probability is introduced to characterize the impact of imperfect CSI. We aim to minimize the delay of FL by jointly designing the computation and communication resource allocation;
- Due to the non-convex form of the objective function, the coupling effect of multiple variables and the binary constraint brought by the user selection vector, the optimization problem is difficult to solve. By introducing additional variables and invoking the semi-definite relaxation (SDR) and the constrained concave convex procedure (CCCP) techniques, we convert it into a convex optimization problem. Then, a low-complexity algorithm is proposed to optimize the computation and communication resources allocation;
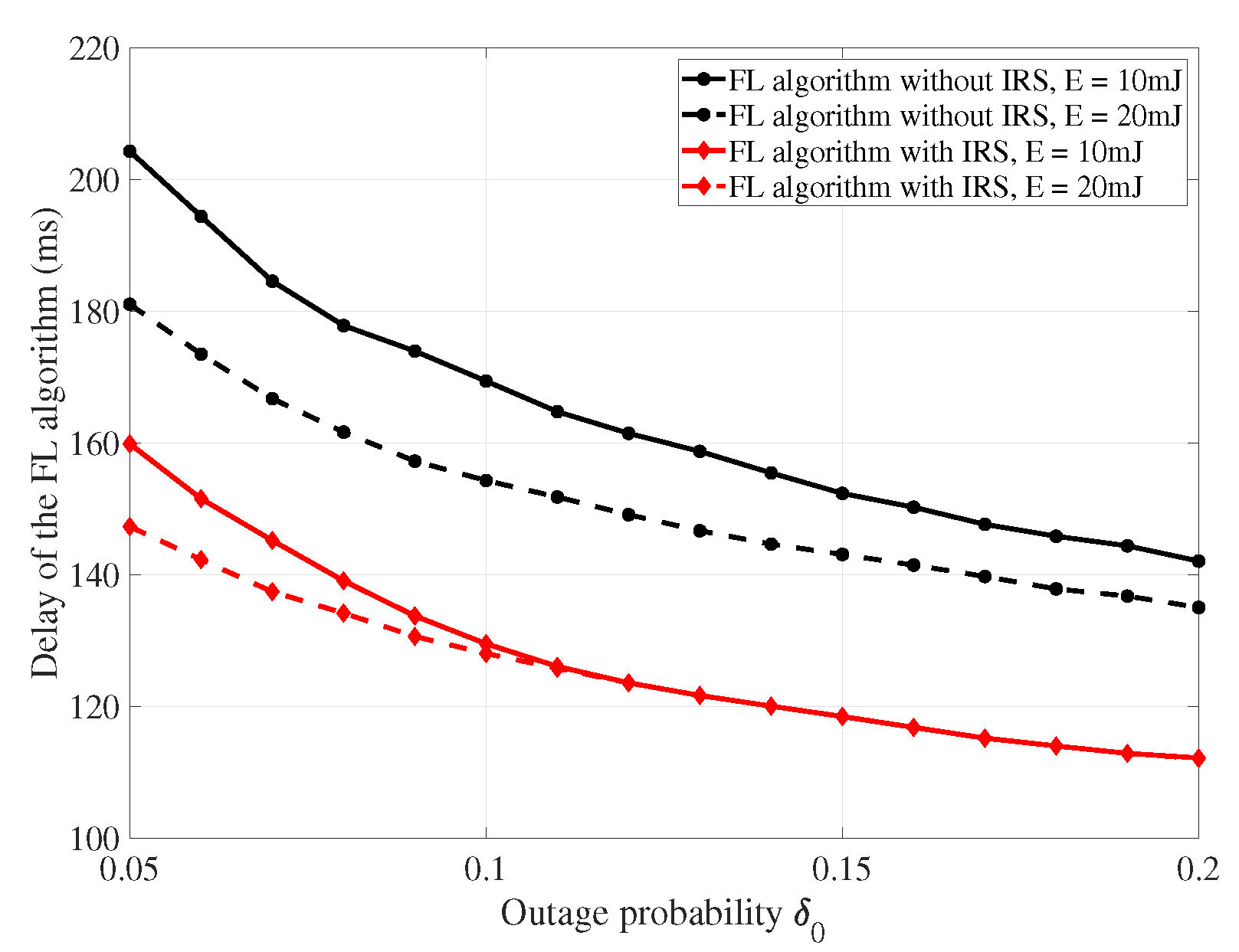
- The simulation results demonstrate that the effectiveness of proposed algorithm in reducing the training time of the FL system base on imperfect CSI.
2. System Model and Channel Model
2.1. System Model
2.1.1. Local Model Computation
2.1.2. Local Model Transmission
2.1.3. Global Model Aggregation and Broadcast
2.2. Imperfect Channel Model
2.3. Outage Probability
3. Problem Formulation
4. Resource Allocation Design for Delay Minimization
| Algorithm 1: Local optimal iterative algorithm. |
1. Initialization Initialize the a feasible initial point . Initialize the maximum number of iterations and penalty factor Initialize iteration index and accuracy index . 2. Joint optimization of , , , , and repeat • Calculate by • Calculate by solving problem for a given point • Calculate accuracy • untilor 3. Output optimal , , , and find from by SVD and Gaussian randomization. = , = , = , = |
5. Numerical Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gündüz, D.; Kurka, D.B.; Jankowski, M.; Amiri, M.M.; Ozfatura, E.; Sreekumar, S. Communicate to Learn at the Edge. IEEE Commun. Mag. 2020, 58, 14–19. [Google Scholar] [CrossRef]
- Nguyen, D.C.; Cheng, P.; Ding, M.; Lopez-Perez, D.; Pathirana, P.N.; Li, J.; Seneviratne, A.; Li, Y.; Poor, H.V. Enabling AI in Future Wireless Networks: A Data Life Cycle Perspective. IEEE Commun. Surv. Tutor. 2021, 23, 553–595. [Google Scholar] [CrossRef]
- Nguyen, M.N.H.; Tran, N.H.; Tun, Y.K.; Han, Z.; Hong, C.S. Toward Multiple Federated Learning Services Resource Sharing in Mobile Edge Networks. IEEE Trans. Mob. Comput. 2021. [Google Scholar] [CrossRef]
- Zaw, C.W.; Hong, C.S. Loss and Energy Tradeoff in Multi-access Edge Computing Enabled Federated Learning. In Proceedings of the 2021 International Conference on Information Networking (ICOIN), Jeju Island, Korea, 13–16 January 2021; pp. 597–602. [Google Scholar] [CrossRef]
- Zaw, C.W.; Pandey, S.R.; Kim, K.; Hong, C.S. Energy-Aware Resource Management for Federated Learning in Multi-Access Edge Computing Systems. IEEE Access 2021, 9, 34938–34950. [Google Scholar] [CrossRef]
- Pase, F.; Giordani, M.; Zorzi, M. On the Convergence Time of Federated Learning Over Wireless Networks Under Imperfect CSI. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Wadu, M.M.; Samarakoon, S.; Bennis, M. Federated Learning under Channel Uncertainty: Joint Client Scheduling and Resource Allocation. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Korea, 25–28 May 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Towards Smart and Reconfigurable Environment: Intelligent Reflecting Surface Aided Wireless Network. IEEE Commun. Mag. 2020, 58, 106–112. [Google Scholar] [CrossRef] [Green Version]
- Chu, Z.; Xiao, P.; Shojafar, M.; Mi, D.; Mao, J.; Hao, W. Intelligent Reflecting Surface Assisted Mobile Edge Computing for Internet of Things. IEEE Wirel. Commun. Lett. 2021, 10, 619–623. [Google Scholar] [CrossRef]
- Zheng, J.; Ni, W.; Tian, H.; Wang, Y. QoS-Constrained Federated Learning Empowered by Intelligent Reflecting Surface. In Proceedings of the 2021 IEEE 32nd Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Helsinki, Finland, 13–16 September 2021; pp. 947–952. [Google Scholar] [CrossRef]
- Liu, H.; Yuan, X.; Zhang, Y.J.A. Reconfigurable Intelligent Surface Enabled Federated Learning: A Unified Communication-Learning Design Approach. IEEE Trans. Wirel. Commun. 2021, 20, 7595–7609. [Google Scholar] [CrossRef]
- Ni, W.; Liu, Y.; Yang, Z.; Tian, H. Over-the-Air Federated Learning and Non-Orthogonal Multiple Access Unified by Reconfigurable Intelligent Surface. In Proceedings of the IEEE INFOCOM 2021-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Vancouver, BC, Canada, 10–13 May 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Taha, A.; Alrabeiah, M.; Alkhateeb, A. Enabling Large Intelligent Surfaces With Compressive Sensing and Deep Learning. IEEE Access 2021, 9, 44304–44321. [Google Scholar] [CrossRef]
- Mishra, D.; Johansson, H. Channel Estimation and Low-complexity Beamforming Design for Passive Intelligent Surface Assisted MISO Wireless Energy Transfer. In Proceedings of the ICASSP 2019–2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 4659–4663. [Google Scholar] [CrossRef]
- Nadeem, Q.U.A.; Alwazani, H.; Kammoun, A.; Chaaban, A.; Debbah, M.; Alouini, M.S. Intelligent Reflecting Surface-Assisted Multi-User MISO Communication: Channel Estimation and Beamforming Design. IEEE Open J. Commun. Soc. 2020, 1, 661–680. [Google Scholar] [CrossRef]
- Zheng, B.; Zhang, R. Intelligent Reflecting Surface-Enhanced OFDM: Channel Estimation and Reflection Optimization. IEEE Wirel. Commun. Lett. 2020, 9, 518–522. [Google Scholar] [CrossRef] [Green Version]
- Hong, S.; Pan, C.; Ren, H.; Wang, K.; Chai, K.K.; Nallanathan, A. Robust Transmission Design for Intelligent Reflecting Surface-Aided Secure Communication Systems With Imperfect Cascaded CSI. IEEE Trans. Wirel. Commun. 2021, 20, 2487–2501. [Google Scholar] [CrossRef]
- Zhou, G.; Pan, C.; Ren, H.; Wang, K.; Nallanathan, A. A Framework of Robust Transmission Design for IRS-Aided MISO Communications With Imperfect Cascaded Channels. IEEE Trans. Signal Process. 2020, 68, 5092–5106. [Google Scholar] [CrossRef]
- Ren, J.; Yu, G.; Ding, G. Accelerating DNN Training in Wireless Federated Edge Learning Systems. IEEE J. Sel. Areas Commun. 2021, 39, 219–232. [Google Scholar] [CrossRef]
- Yang, Z.; Chen, M.; Saad, W.; Hong, C.S.; Shikh-Bahaei, M. Energy Efficient Federated Learning Over Wireless Communication Networks. IEEE Trans. Wirel. Commun. 2021, 20, 1935–1949. [Google Scholar] [CrossRef]
- Luo, S.; Chen, X.; Wu, Q.; Zhou, Z.; Yu, S. HFEL: Joint Edge Association and Resource Allocation for Cost-Efficient Hierarchical Federated Edge Learning. IEEE Trans. Wirel. Commun. 2020, 19, 6535–6548. [Google Scholar] [CrossRef]
- Fang, F.; Wang, K.; Ding, Z.; Leung, V.C.M. Energy-Efficient Resource Allocation for NOMA-MEC Networks With Imperfect CSI. IEEE Trans. Commun. 2021, 69, 3436–3449. [Google Scholar] [CrossRef]
- Sun, Y.; Baricz, Á.; Zhou, S. On the Monotonicity, Log-Concavity, and Tight Bounds of the Generalized Marcum and Nuttall Q-Functions. IEEE Trans. Inf. Theory 2010, 56, 1166–1186. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Ng, D.W.K.; Ding, Z.; Schober, R. Optimal Joint Power and Subcarrier Allocation for MC-NOMA Systems. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Y.; Pesavento, M. Joint Optimization of Source Power Allocation and Distributed Relay Beamforming in Multiuser Peer-to-Peer Relay Networks. IEEE Trans. Signal Process. 2012, 60, 2962–2973. [Google Scholar] [CrossRef]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programming, Version 2.1. 2014. Available online: http://cvxr.com/cvx (accessed on 3 November 2021).
- Wu, Q.; Zhang, R. Intelligent Reflecting Surface Enhanced Wireless Network via Joint Active and Passive Beamforming. IEEE Trans. Wirel. Commun. 2019, 18, 5394–5409. [Google Scholar] [CrossRef] [Green Version]
- Christopoulos, D.; Chatzinotas, S.; Ottersten, B. Weighted Fair Multicast Multigroup Beamforming Under Per-antenna Power Constraints. IEEE Trans. Signal Process. 2014, 62, 5132–5142. [Google Scholar] [CrossRef] [Green Version]
- Nemirovskii, A.S.; Nesterov, Y.E. Interior-Point Polynomial Algorithms in Convex Programming; SIAM: Philadelphia, PA, USA, 1994. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition | Symbol | Definition |
|---|---|---|---|
| K | Number of UDs | N | Number of IRS elements |
| Set of UDs | Set of IRS elements | ||
| , | The time and energy consumed on local training of the k-th UD | , | The time and energy consumed on the model transmission of the k-th UD |
| L | Number of local iteration | Effective capacitance coefficient of the k-th UD’s computing chipset | |
| Number of CPU cycles for the k-th UD to process one sample data | Training data set of the k-th UD | ||
| CPU frequency variable of the k-th UD for local training | The minimum and maximum computation capacity of UDs | ||
| The transmission power variable of the k-th UD for the model transmission | The max transmission power of UDs | ||
| b | Bandwidth of each UD | , , | Channel from the k-th UD to BS, the k-th UD to IRS and from IRS to BS |
| The noise power spectral density | Estimation error of direct channel and cascaded channel | ||
| The transmission rate of the k-th UD | The transmission target rate of the k-th UD |
| Acronym | Meaning | Acronym | Meaning |
|---|---|---|---|
| ML | Machine learning | FL | Federated learning |
| UD | User device | BS | Base station |
| CSI | Channel state information | IRS | Intelligent reflector surfaces |
| SDR | Semi-definite relaxation | CCCP | Constrained concave convex procedure |
| CCDF | Complementary cumulative distribution function | CSCG | Circularly symmetric complex Gaussian |
| MINLP | Mixed integer non-linear programming | QCQP | Quadratically constrained quadratic program |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, W.; Han, Z.; Zhao, L.; Xu, H.; Li, Z.; Wang, Z. Resource Allocation for Intelligent Reflecting Surfaces Assisted Federated Learning System with Imperfect CSI. Algorithms 2021, 14, 363. https://doi.org/10.3390/a14120363
Huang W, Han Z, Zhao L, Xu H, Li Z, Wang Z. Resource Allocation for Intelligent Reflecting Surfaces Assisted Federated Learning System with Imperfect CSI. Algorithms. 2021; 14(12):363. https://doi.org/10.3390/a14120363
Chicago/Turabian StyleHuang, Wei, Zhiren Han, Li Zhao, Hongbo Xu, Zhongnian Li, and Ze Wang. 2021. "Resource Allocation for Intelligent Reflecting Surfaces Assisted Federated Learning System with Imperfect CSI" Algorithms 14, no. 12: 363. https://doi.org/10.3390/a14120363
APA StyleHuang, W., Han, Z., Zhao, L., Xu, H., Li, Z., & Wang, Z. (2021). Resource Allocation for Intelligent Reflecting Surfaces Assisted Federated Learning System with Imperfect CSI. Algorithms, 14(12), 363. https://doi.org/10.3390/a14120363