
Outdoor Node Localization Using Random Neural Networks for Large-Scale Urban IoT LoRa Networks †




Abstract
:1. Introduction
- Developing a new LoRaWAN-based localization model using RNN for large, dense urban scenarios.
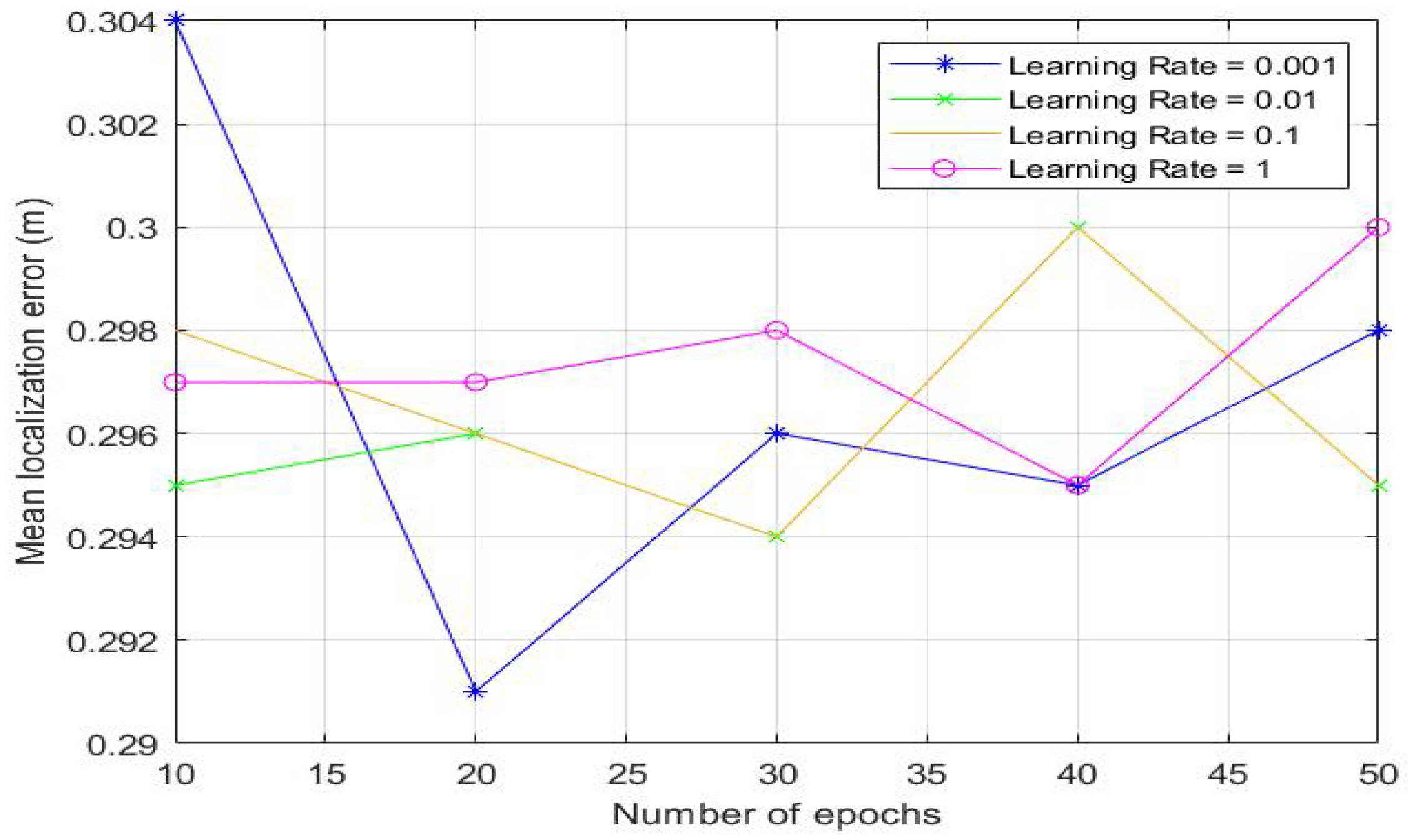
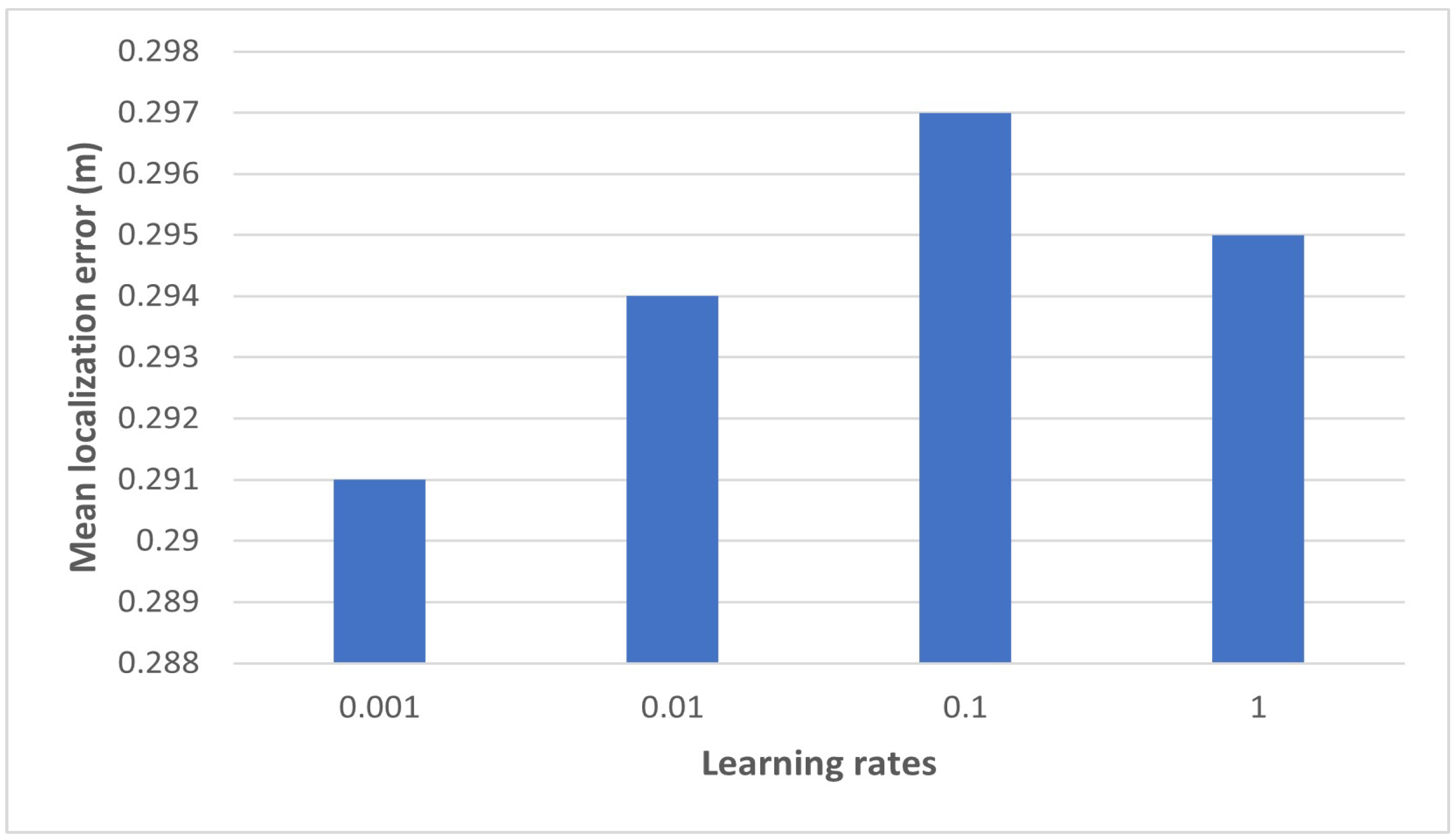
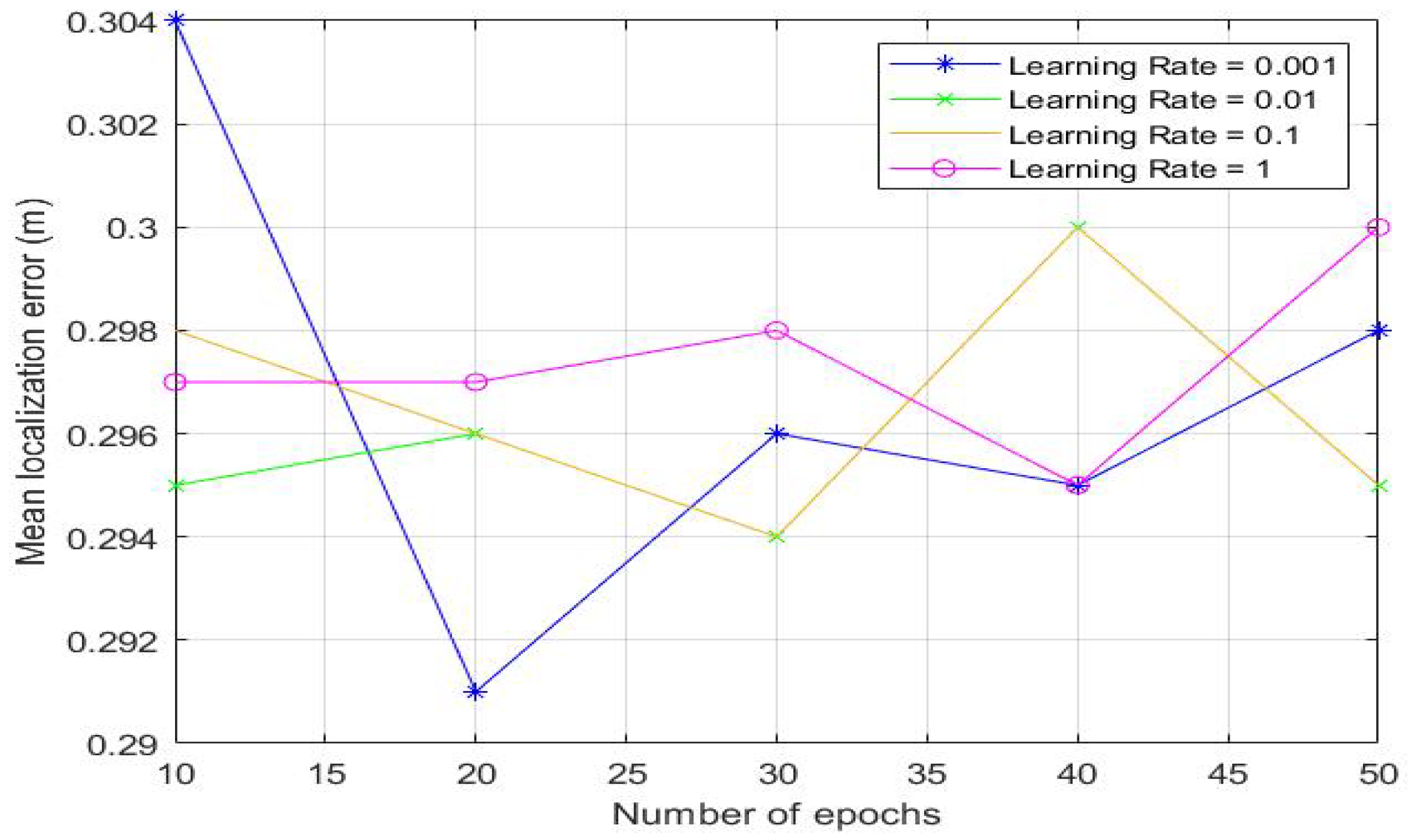
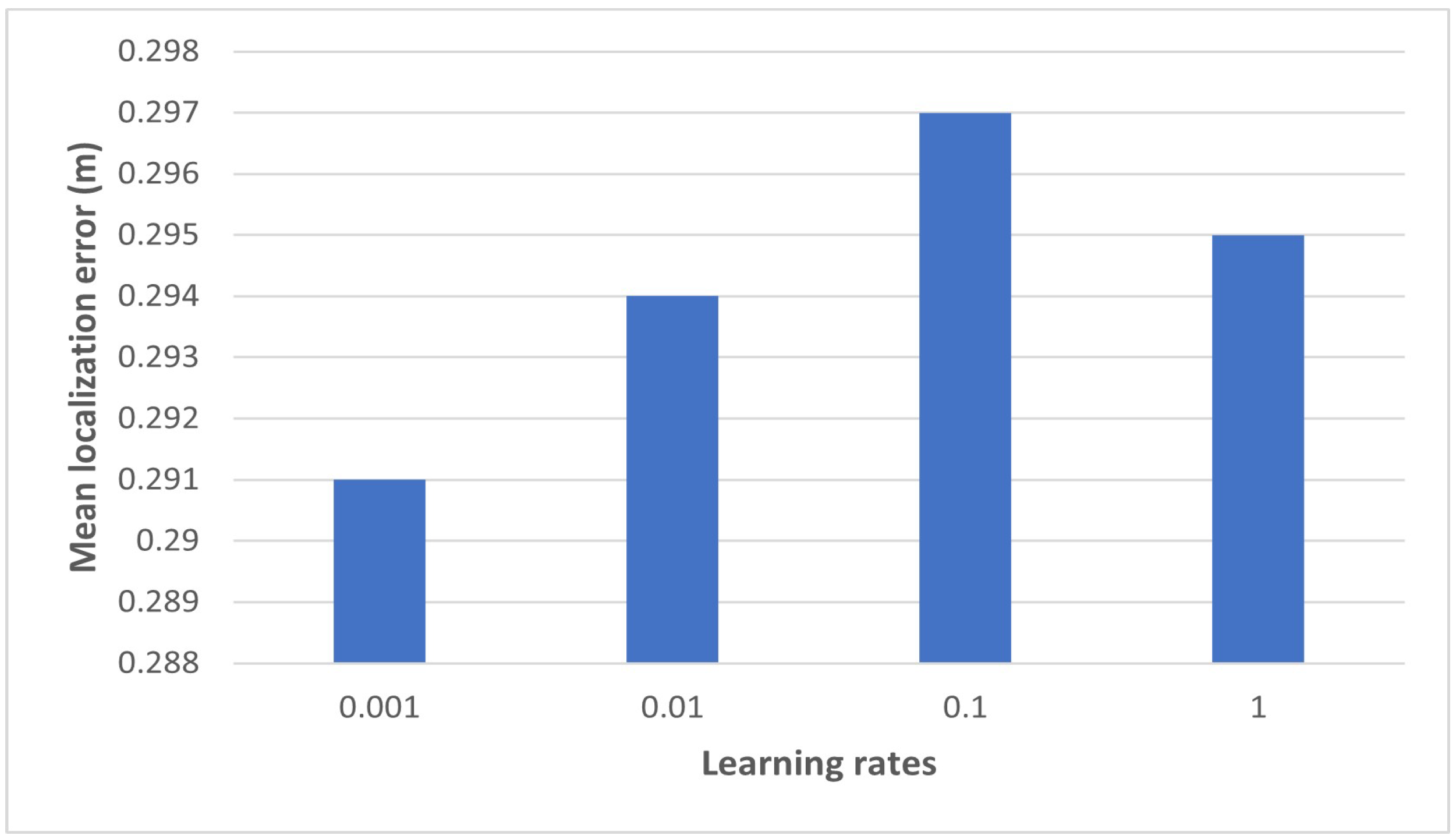
- Training and testing the different RNN-based localization systems with various learning rates.
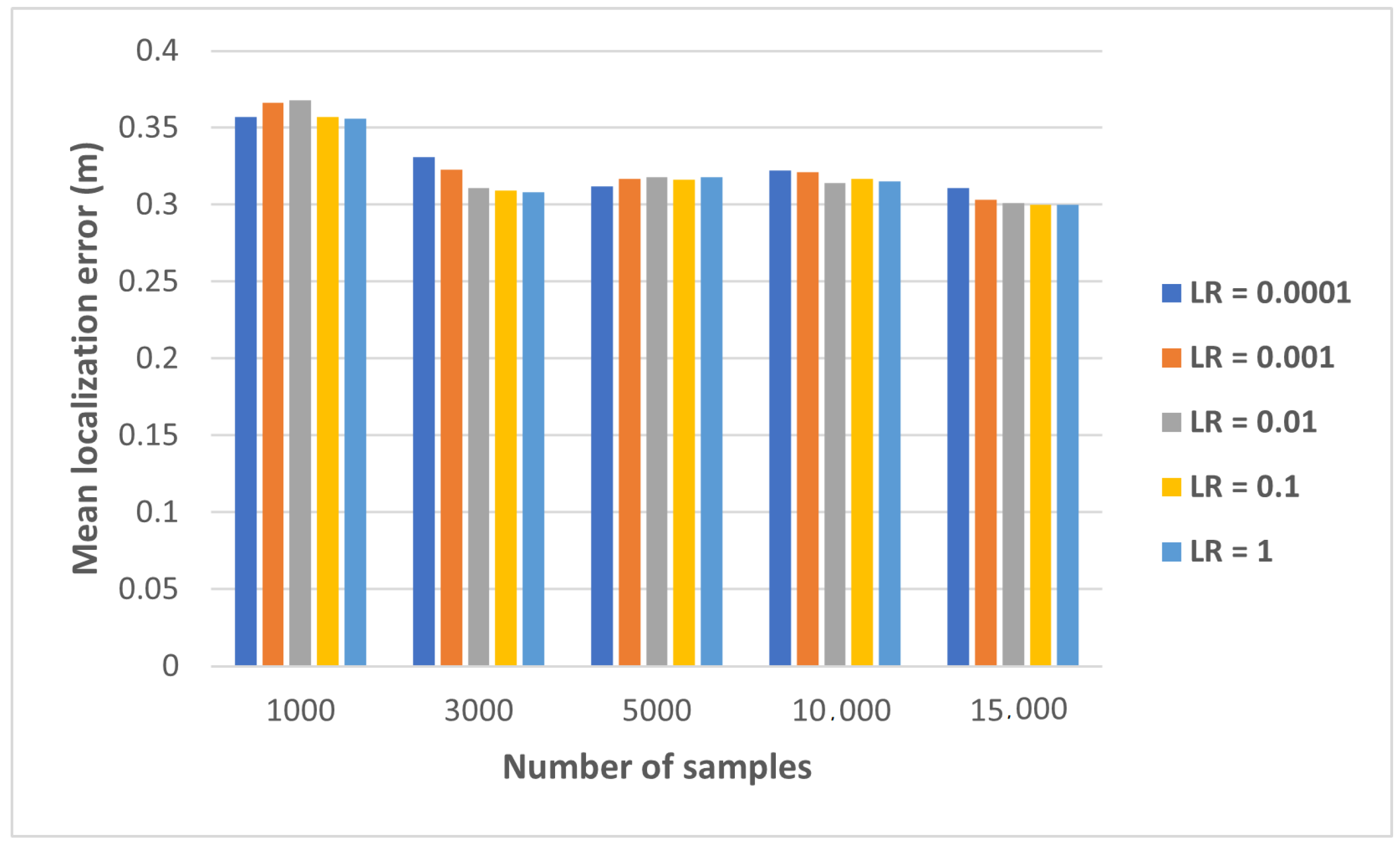
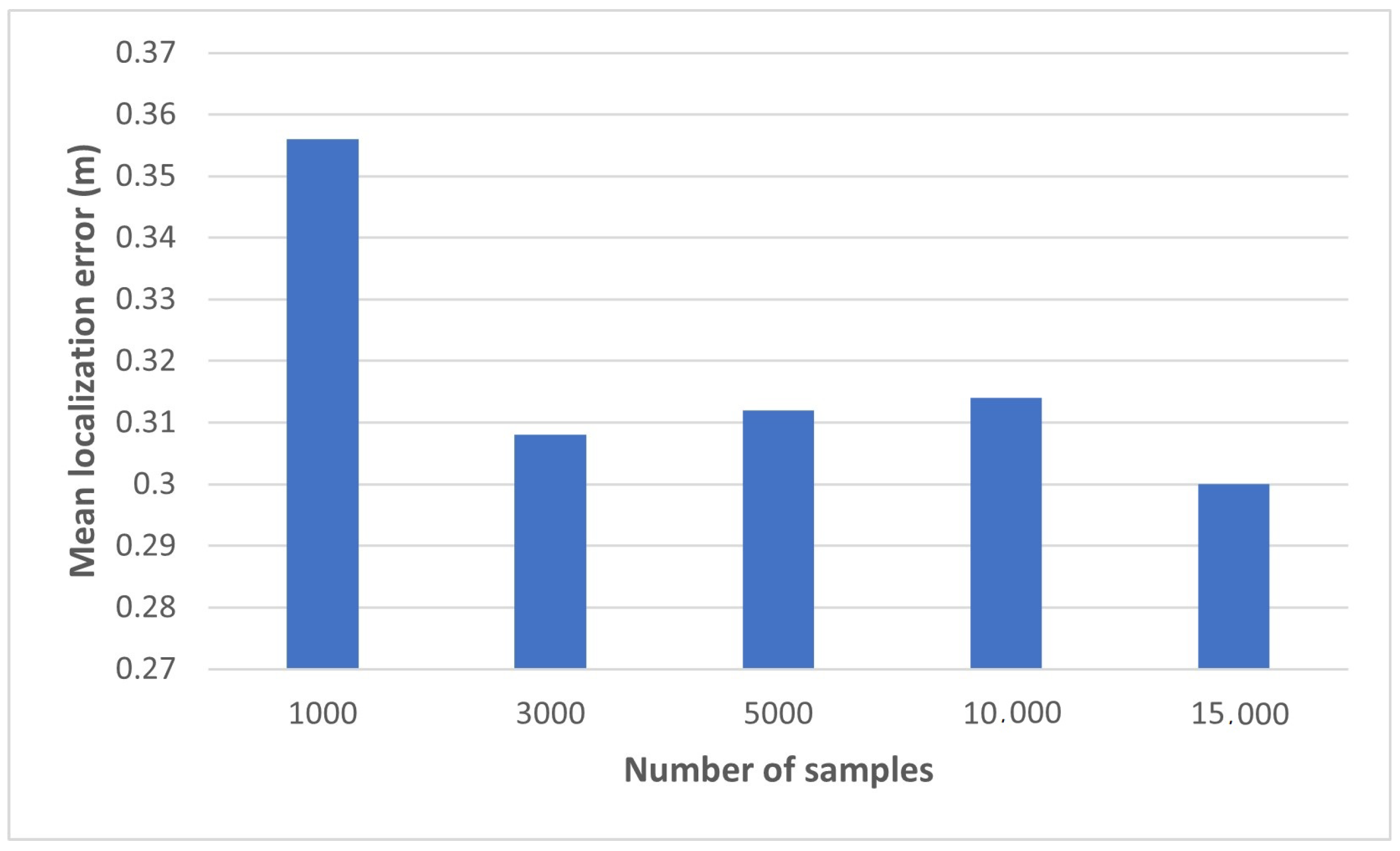
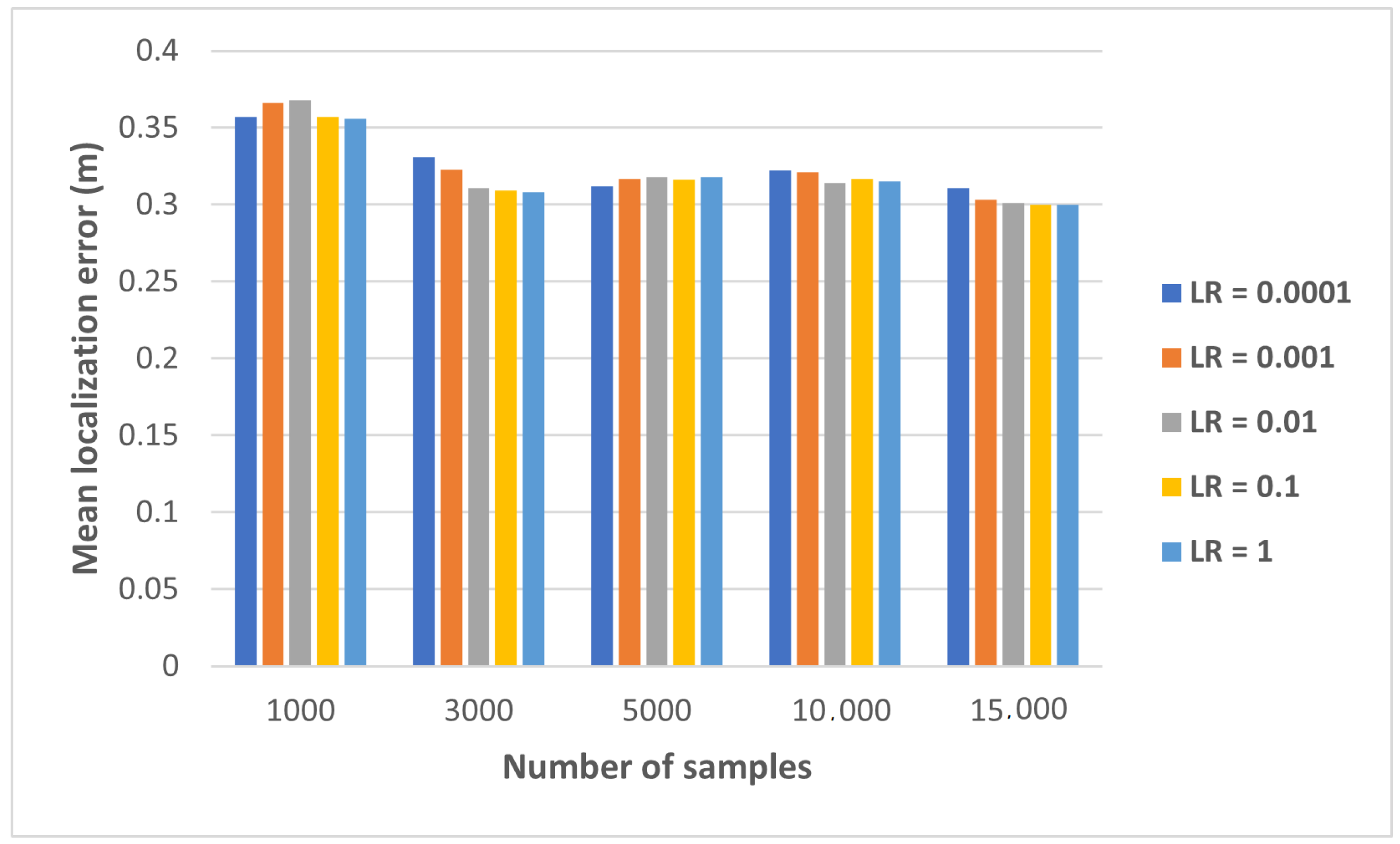
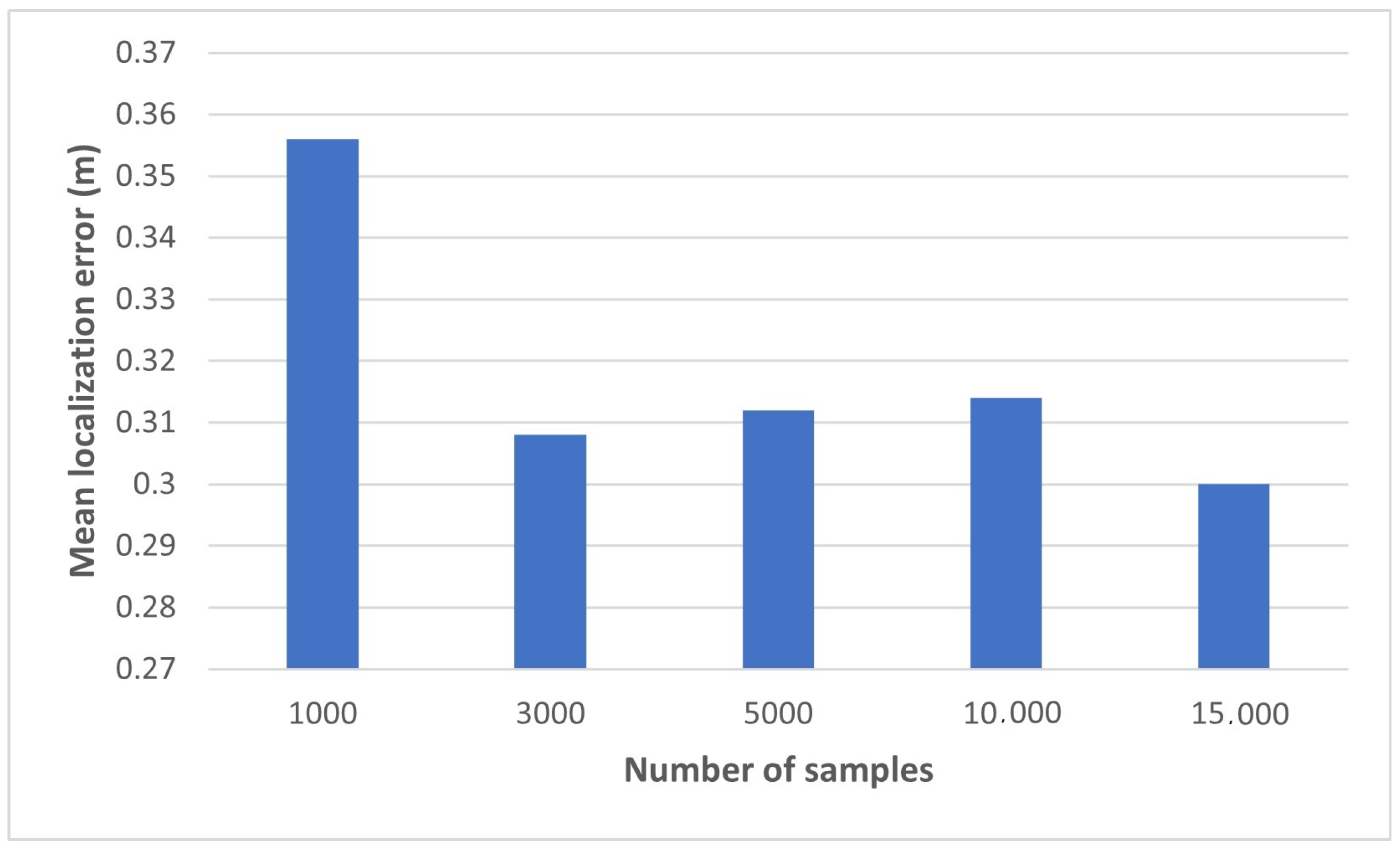
- Training and testing the different RNN-based localization models with different data samples in Antwerp dataset publicly available and used in many research papers.
- Critically analyzing the results with other popular methods applied to the same dataset.
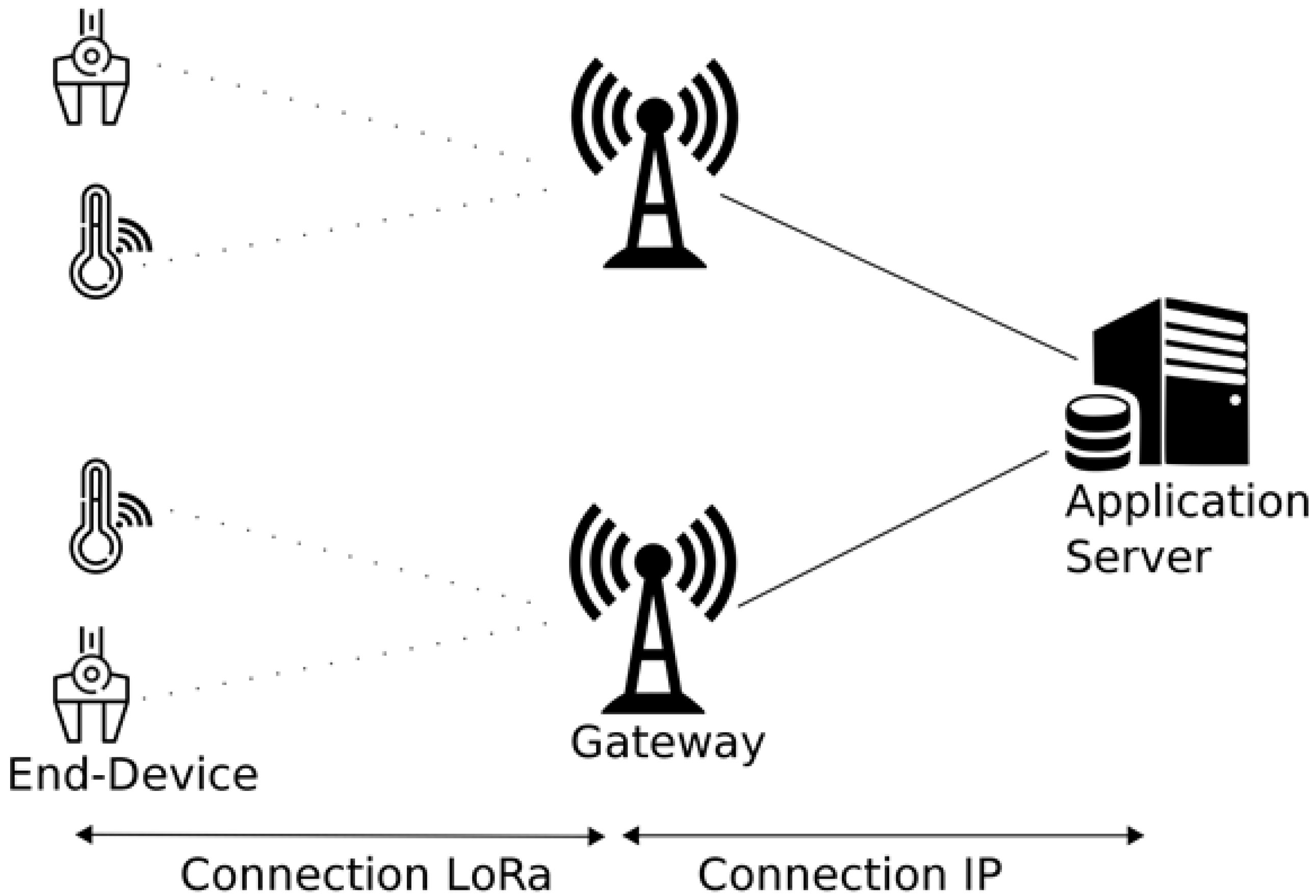
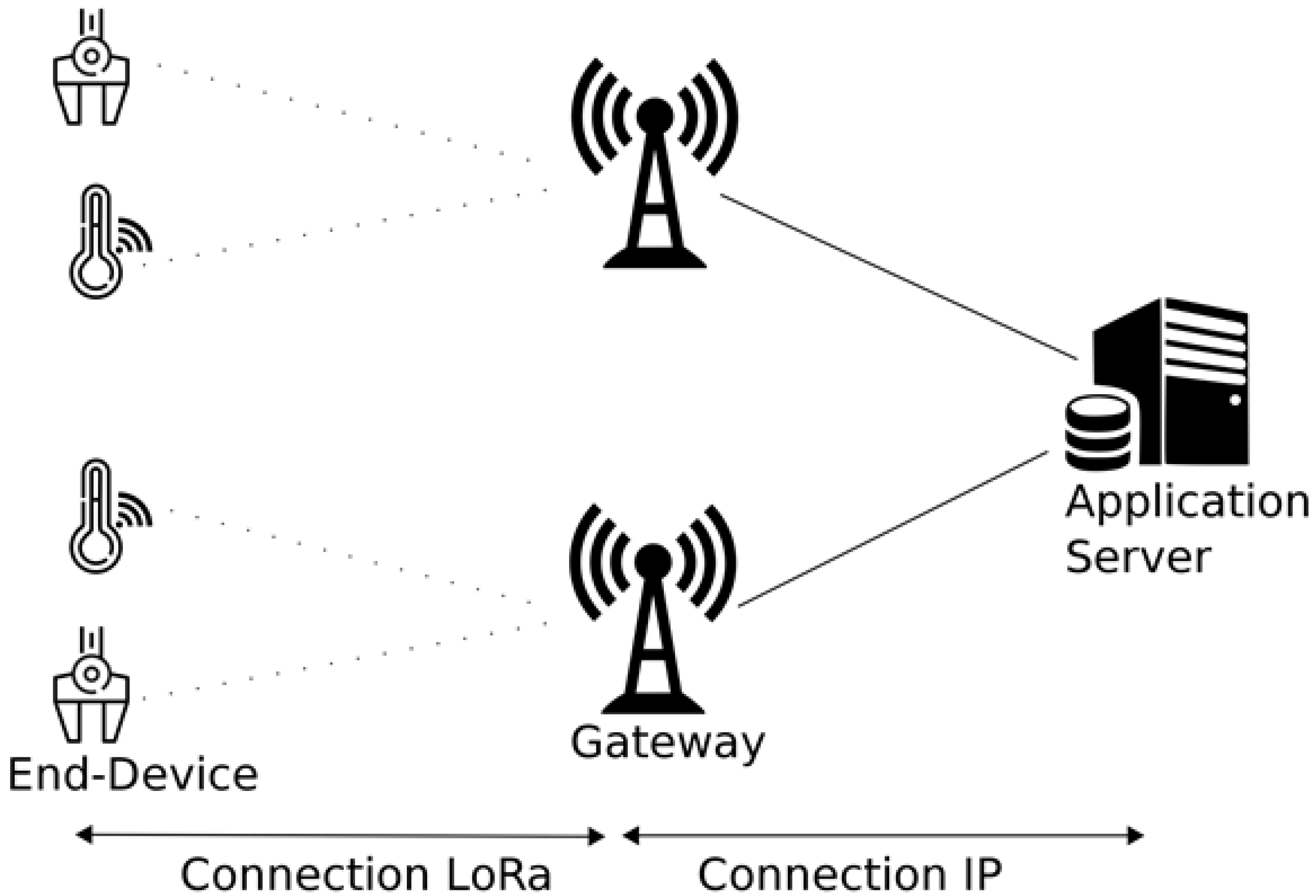
2. LoRa and LoRaWAN
3. Related Work
4. Methodology
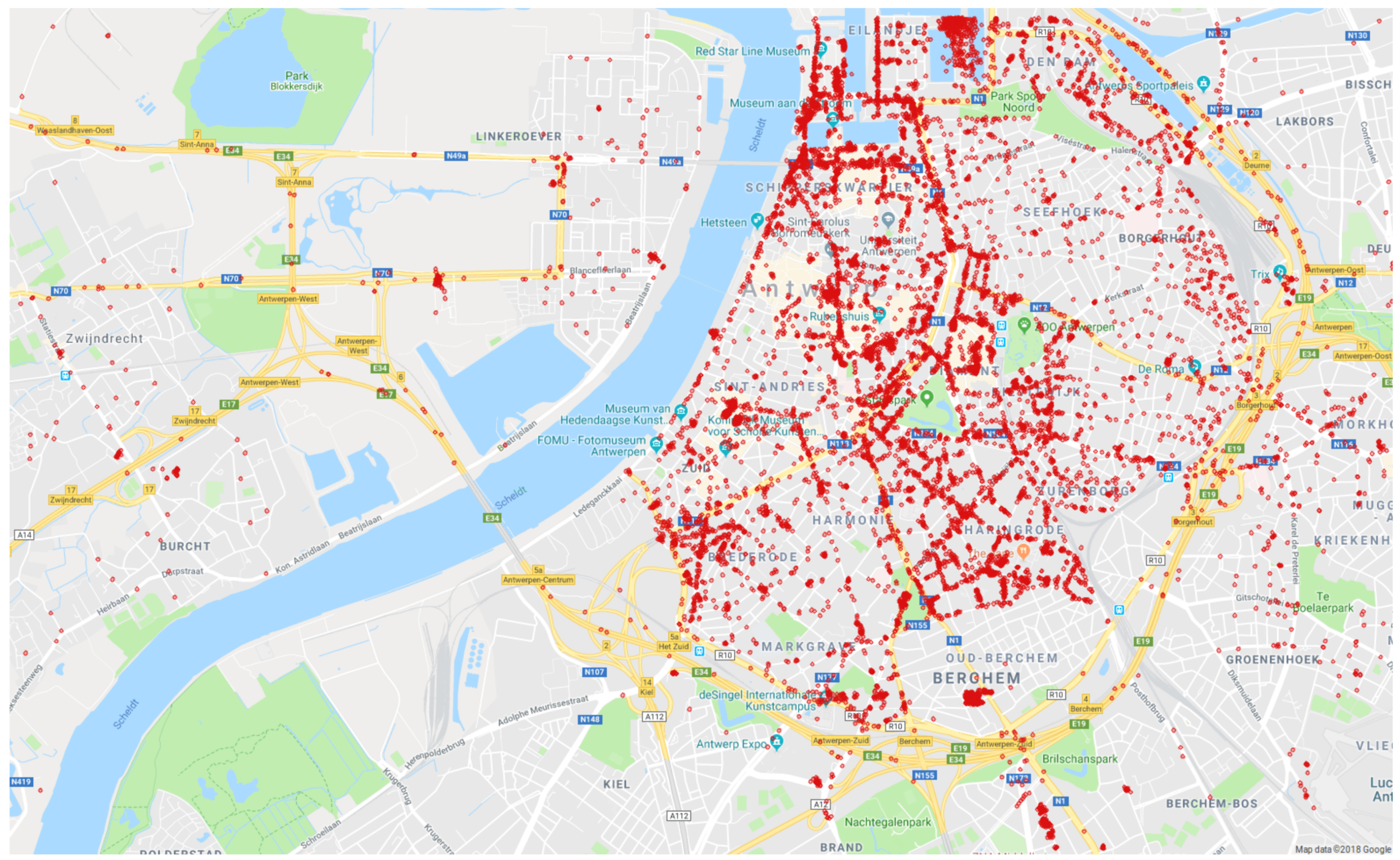
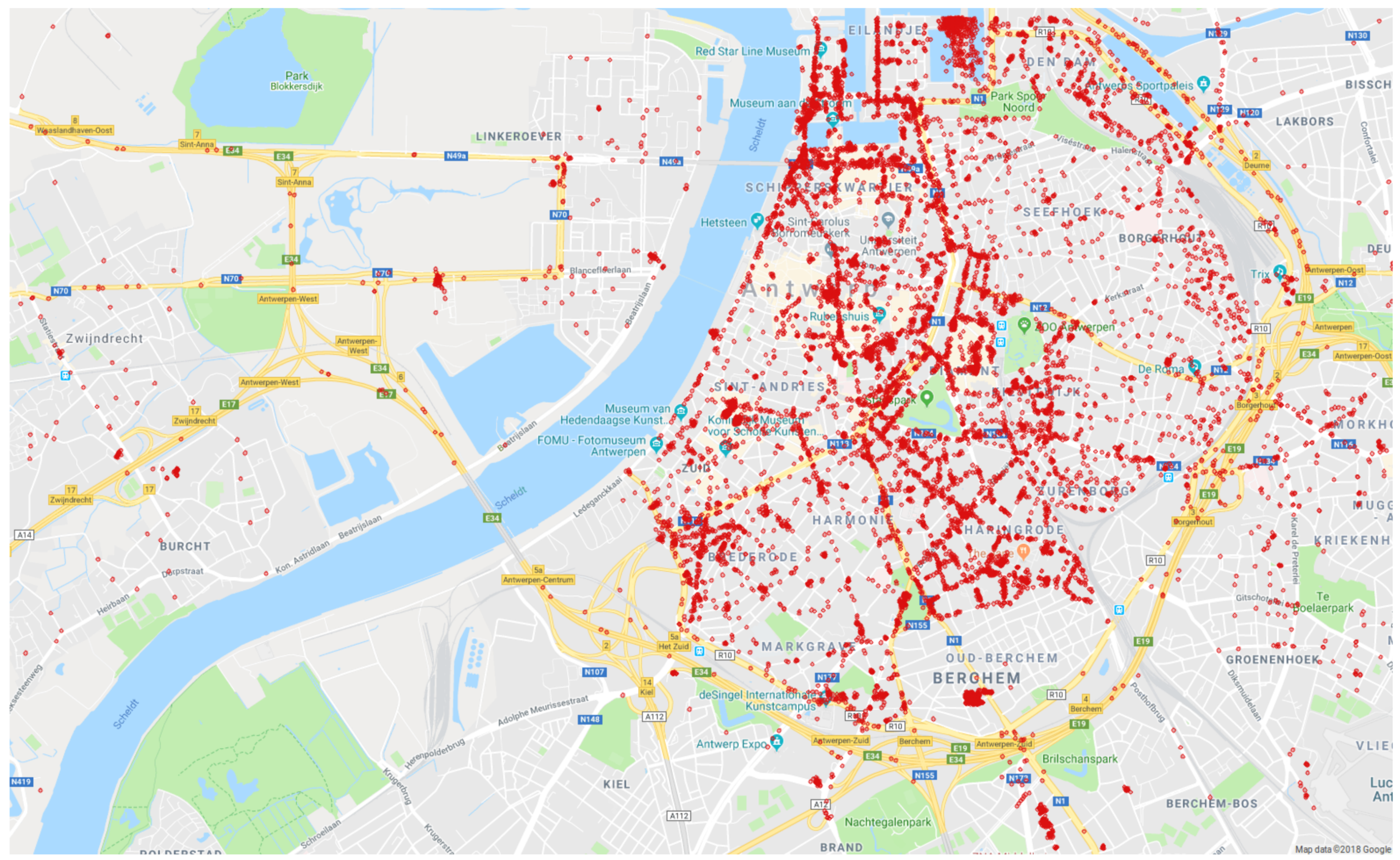
4.1. Dataset
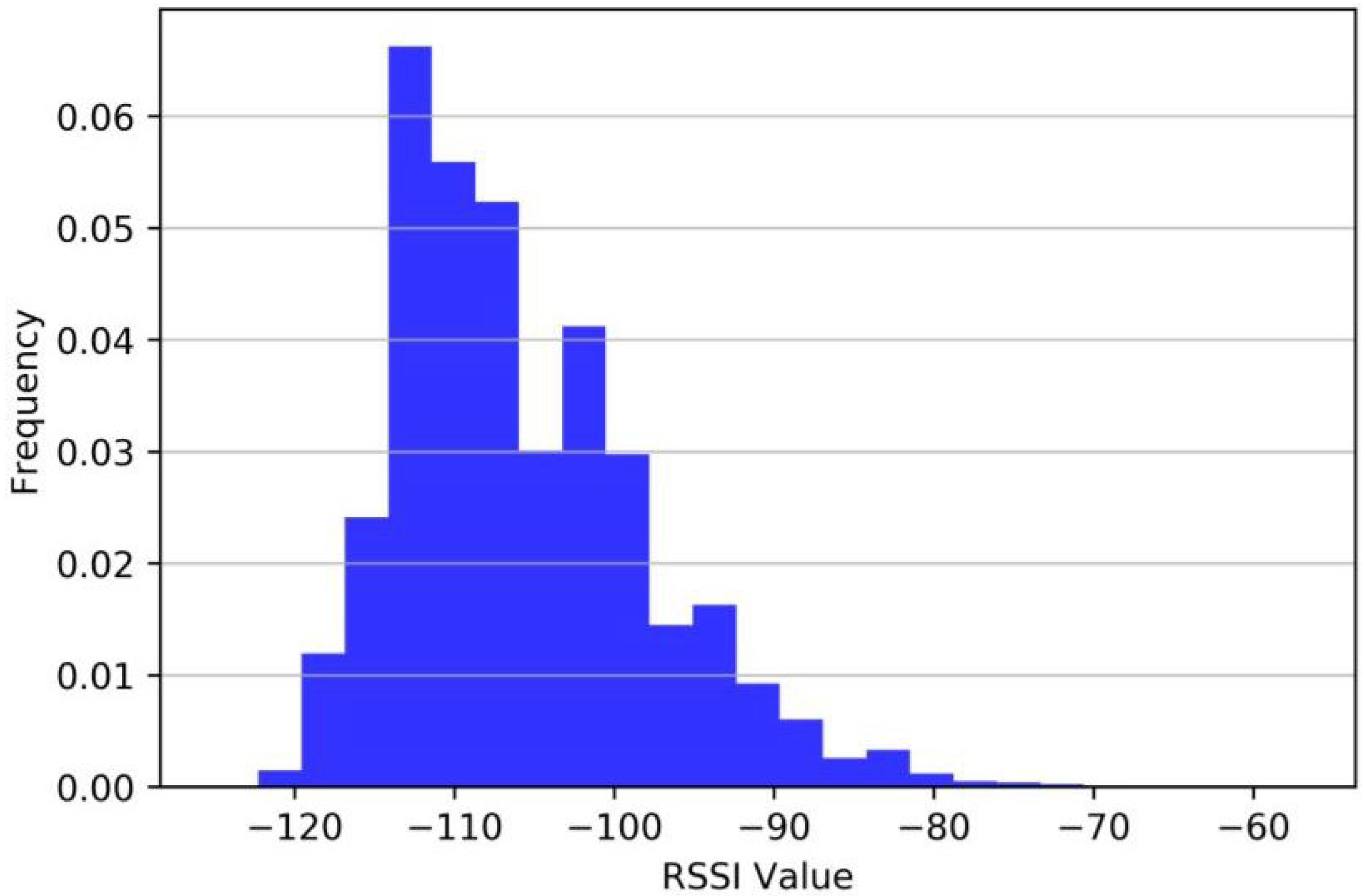
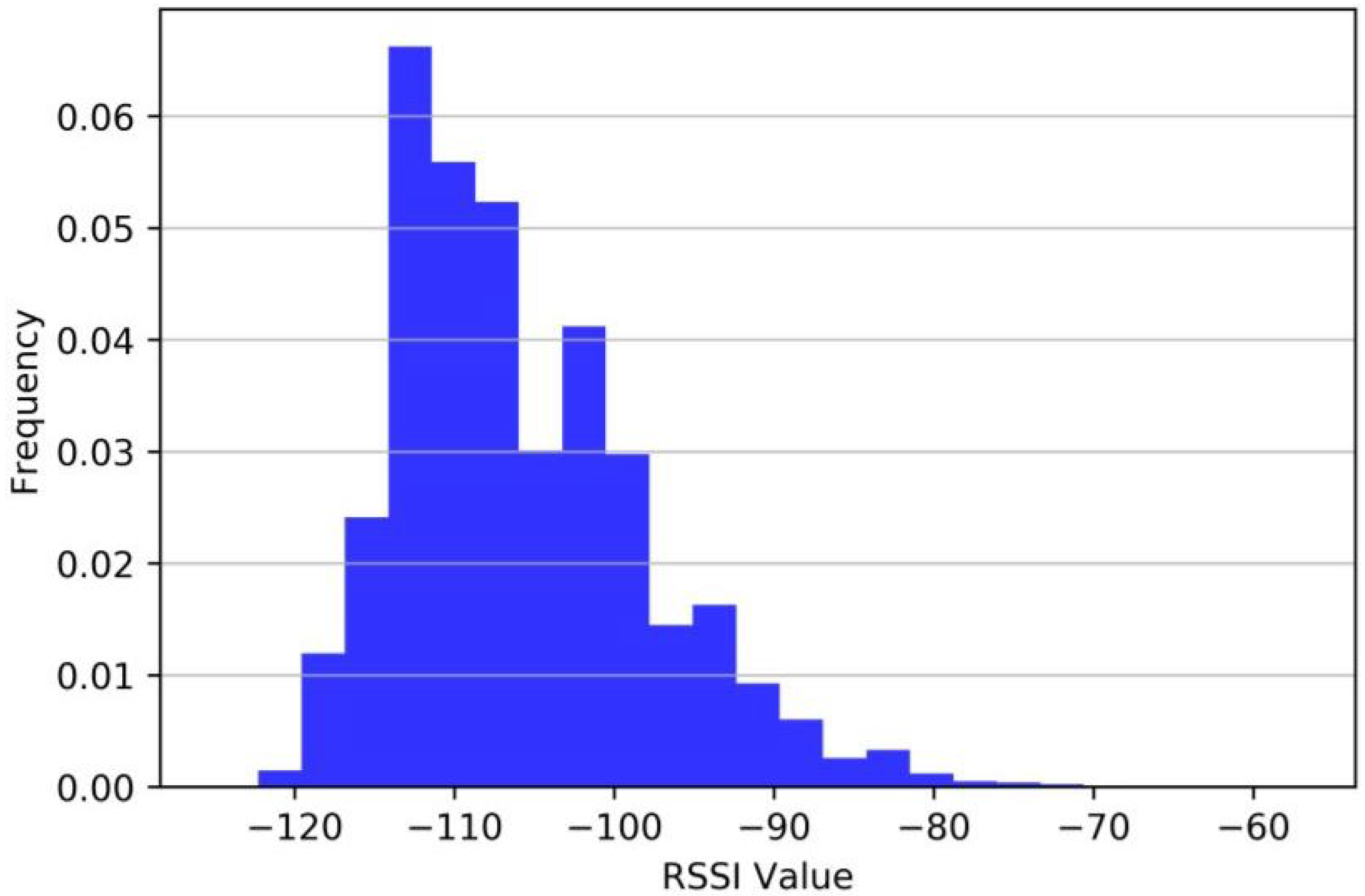
4.2. Data Normalization
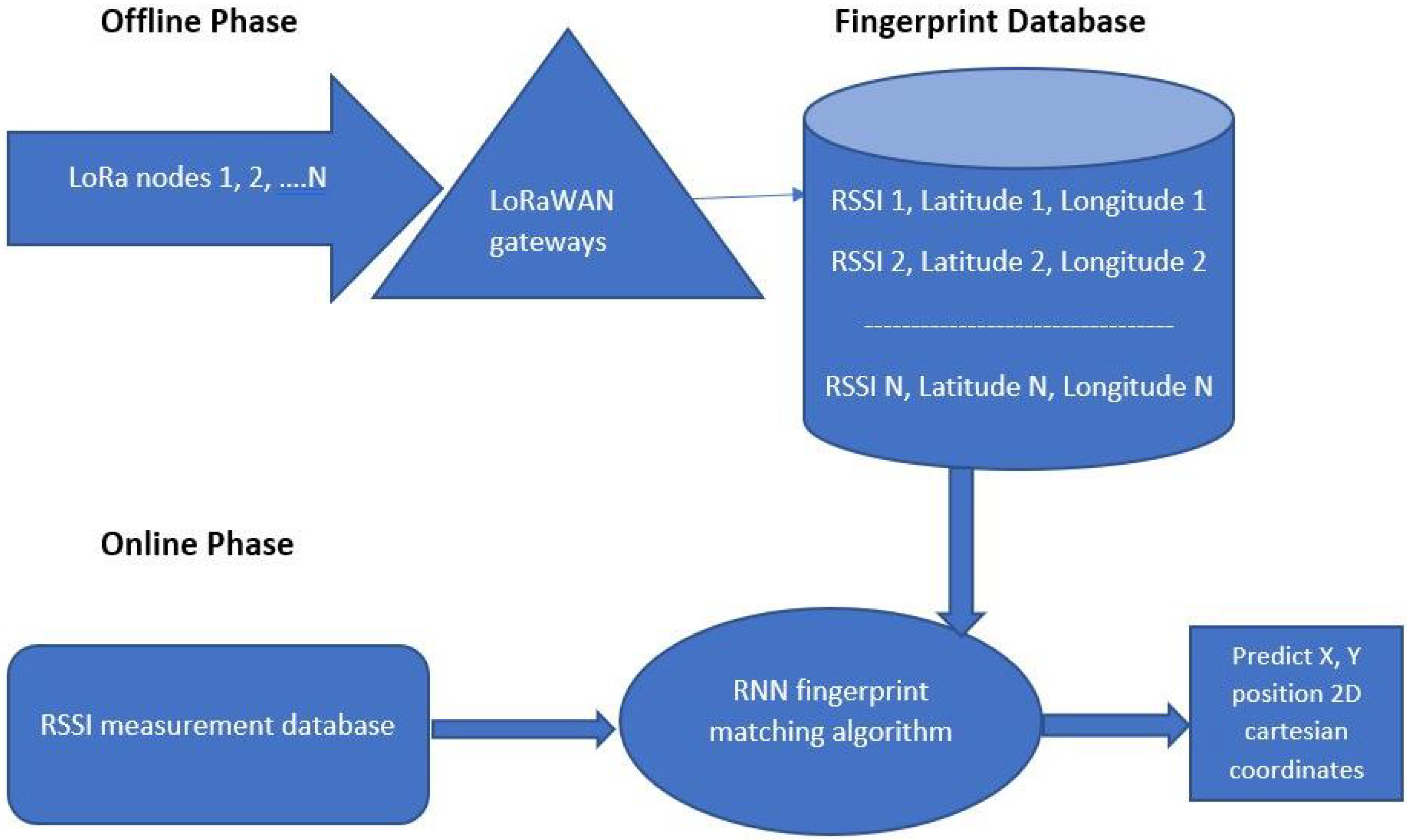
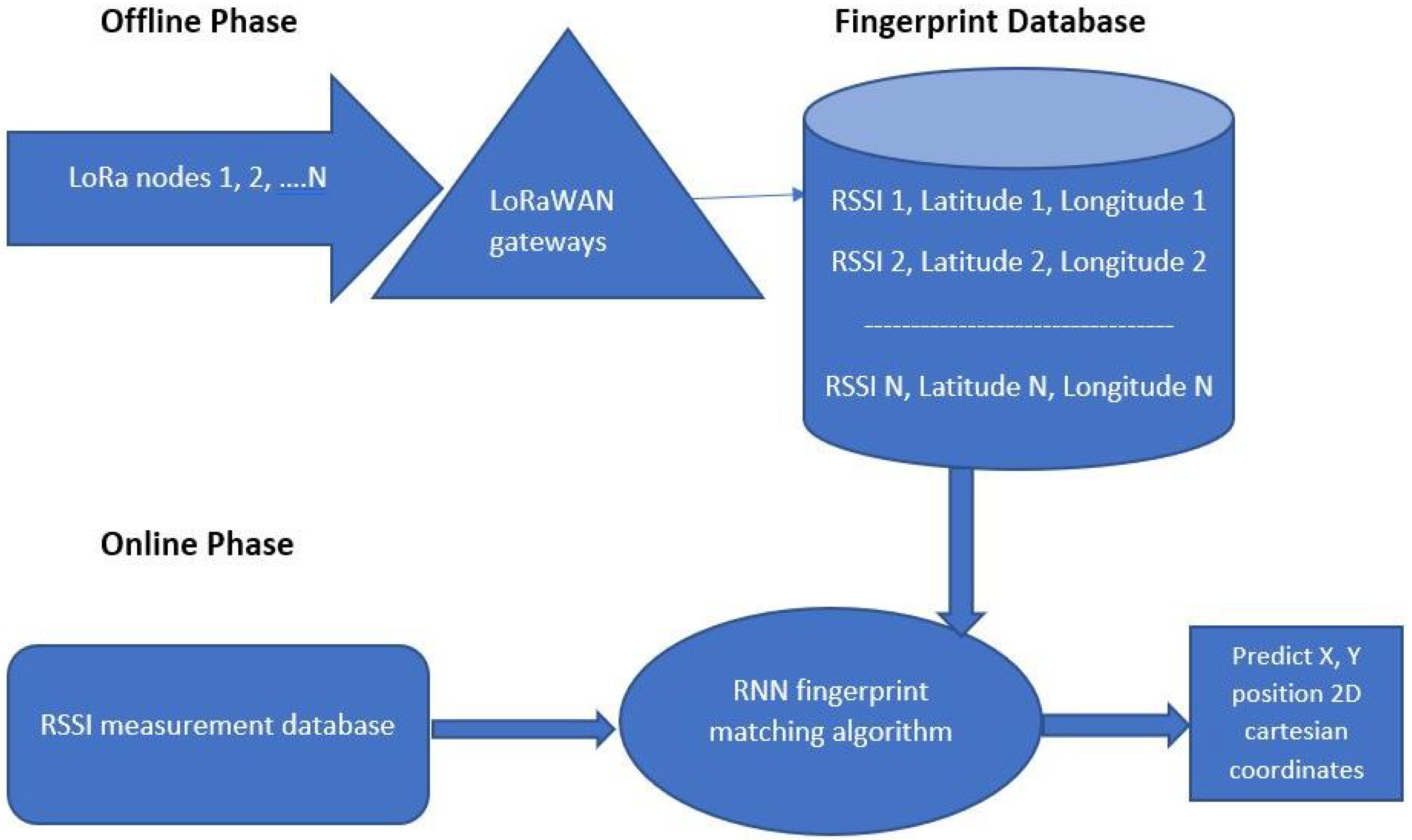
4.3. Proposed RNN-Based Localization System Using LoRaWAN
| Algorithm 1: RNN-Based Localization. |
| Input: RSSIxt,yt in each time slot, M Output: Regression model based on RNN 1: Use 80% of the collected RSSI values from trajectory where the user moved and consider enough of the data in this trajectory. 2: Generate the RSSI database in each time slot. 3: Initialize the structure of RNN. 4: Train RNN and compute the RNN parameters. 5: Use 20% of the collected RSSI data for testing, then verify the trained RNN model in step 4. 6: Change the RNN parameters and estimate the best parameters for accurate localization using steps 5 and 6. |
5. Results and Analysis
Comparative Performance Analysis
6. Conclusions and Future Work
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Poulose, A.; Kim, J.; Han, D.S. A sensor fusion framework for indoor localization using smartphone sensors and Wi-Fi RSSI measurements. Appl. Sci. 2019, 9, 4379. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Schafer, J.; Ganz, A. Disaster response: Victims’ localization using Bluetooth Low Energy sensors. In Proceedings of the 2017 IIEEE International Symposium on Technologies for Homeland Security (HST), Waltham, MA, USA, 25–26 April 2017; pp. 31–34. [Google Scholar]
- Uradzinski, M.; Guo, H.; Liu, X.; Yu, M. Advanced Indoor Positioning Using Zigbee Wireless Technology. Wirel. Pers. Commun. 2017, 97, 6509–6518. [Google Scholar] [CrossRef]
- Richter, P.; Toledano-Ayala, M. Ubiquitous and Seamless Localization: Fusing GNSS Pseudoranges and WLAN Signal Strengths. Mob. Inf. Syst. 2017, 2017, 8260746. [Google Scholar] [CrossRef] [Green Version]
- Kang, J.M.; Yoon, T.S.; Kim, E.; Park, J.B. Lane-level map-matching method for vehicle localization using GPS and camera on a high-definition map. Sensors 2020, 20, 2166. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Daramouskas, I.; Kapoulas, V.; Pegiazis, T. A survey of methods for location estimation on Low Power Wide Area Networks. In Proceedings of the 2019 10th International Conference on Information, Intelligence, Systems and Applications (IISA), Patras, Greece, 15–17 July 2019; pp. 2019–2022. [Google Scholar]
- Podevijn, N.; Trogh, J.; Karaagac, A.; Haxhibeqiri, J.; Hoebeke, J.; Martens, L.; Suanet, P.; Hendrikse, K.; Plets, D.; Joseph, W. TDoA-based outdoor positioning in a public LoRa network. In Proceedings of the 12th European Conference on Antennas and Propagation (EuCAP 2018), London, UK, 9–13 April 2018. [Google Scholar]
- Anagnostopoulos, G.G.; Kalousis, A. A Reproducible Comparison of RSSI Fingerprinting Localization Methods Using LoRaWAN. In Proceedings of the 2019 16th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 23–24 October 2019. [Google Scholar]
- Podevijn, N.; Plets, D.; Trogh, J.; Martens, L.; Suanet, P.; Hendrikse, K.; Joseph, W. TDoA-Based Outdoor Positioning with Tracking Algorithm in a Public LoRa Network. Wirel. Commun. Mob. Comput. 2018, 2018, 1864209. [Google Scholar] [CrossRef]
- Choi, W.; Chang, Y.S.; Jung, Y.; Song, J. Low-power LORa signal-based outdoor positioning using fingerprint algorithm. ISPRS Int.-Geo-Inf. 2018, 7, 440. [Google Scholar] [CrossRef] [Green Version]
- Bhatti, G. Machine learning based localization in large-scale wireless sensor networks. Sensors 2018, 18, 4179. [Google Scholar] [CrossRef] [Green Version]
- Qureshi, A.U.H.; Larijani, H.; Ahmad, J.; Mtetwa, N. A Novel Random Neural Network Based Approach for Intrusion Detection Systems. In Proceedings of the 2018 10th Computer Science and Electronic Engineering (CEEC), Colchester, UK, 19–21 September 2018; pp. 50–55. [Google Scholar]
- Semtech. LoRaWANspecificationv1.1. Available online: https://www.lora-alliance.org/technology (accessed on 30 August 2021).
- Bissett, D. Analysing Tdoa Localisation in LoRa Networks; Delft University of Technology: Delft, The Netherlands, 2018. [Google Scholar]
- Ha, G.Y.; Seo, S.B.; Oh, H.S.; Jeon, W.S. LoRa ToA-based localization using fingerprint method. In Proceedings of the 2019 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 16–18 October 2019; pp. 349–353. [Google Scholar]
- Fargas, B.C.; Petersen, M.N. GPS-free geolocation using LoRa in low-power WANs. In Proceedings of the 2017 Global Internet of Things Summit (Giots), Geneva, Switzerland, 6–9 June 2017. [Google Scholar]
- Walravens, M.; Verreyken, E.; Steckel, J. Spiking neural network implementation on fpga for robotic behaviour. In Proceedings of the International Conference on P2P, Parallel, Grid, Cloud and Internet Computing 2019, Antwerp, Belgium, 7–9 November 2019; pp. 694–703. [Google Scholar]
- Abdul, N.; Zghair, K.; Croock, M.S.; Abdul, A.; Taresh, R. Indoor Localization System Using Wi-Fi Technology. Iraqi J. Comput. Commun. Control Syst. Eng. 2019, 19, 69–77. [Google Scholar]
- Hernández, N.; Ocaña, M.; Alonso, J.M.; Kim, E. Continuous space estimation: Increasingwifi-based indoor localization resolution without increasing the site-survey effort. Sensors 2017, 17, 147. [Google Scholar] [CrossRef] [PubMed]
- Janssen, T.; Weyn, M.; Berkvens, R. Localization in low power wide area networks using wi-fi fingerprints. Appl. Sci. 2017, 7, 936. [Google Scholar] [CrossRef] [Green Version]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Sadowski, S.; Spachos, P. RSSI-Based Indoor Localization with the Internet of Things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]
- Lin, Y.; Dong, W.; Gao, Y.; Gu, T. SateLoc: A virtual fingerprinting approach to outdoor lora localization using satellite images. In Proceedings of the 19th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN 2020), Sydney, Australia, 21–24 April 2020; pp. 13–24. [Google Scholar] [CrossRef]
- Samanta, R.; Kumari, C.; Deb, N.; Bose, S.; Cortesi, A.; Chaki, N. Node localization for indoor tracking using artificial neural network. In Proceedings of the 2018 Third International Conference on Fog and Mobile Edge Computing (FMEC), Barcelona, Spain, 23–26 April 2018; pp. 229–233. [Google Scholar]
- Bhatnagar, T. Application of Artificial Intelligence and Low- Power Wide-Area Network (LPWAN) in the development of Smart Cities. In Unmanned Aerial Vehicles in Smart Cities; Springer International Publishing: New York, NY, USA, 2020. [Google Scholar]
- Gu, C.; Tan, R. LoRa-Based Localization: Opportunities and Challenges LoRa-Based Localization: Opportunities and Challenges. arXiv 2018, arXiv:1812.11481. [Google Scholar]
- Daramouskas, I.; Kapoulas, V.; Paraskevas, M. Using Neural Networks for RSSI Location Estimation in LoRa Networks. In Proceedings of the 2019 10th International Conference on Information, Intelligence, Systems and Applications (IISA), Patras, Greece, 15–17 July 2019; pp. 1–7. [Google Scholar]
- Sallouha, H.; Chiumento, A.; Rajendran, S.; Pollin, S. Localization in Ultra Narrow Band IoT Networks: Design Guidelines and Tradeoffs. IEEE Internet Things J. 2019, 6, 9375–9385. [Google Scholar] [CrossRef] [Green Version]
- Adege, A.B.; Lin, H.P.; Tarekegn, G.B.; Jeng, S.S. Applying deep neural network (DNN) for robust indoor localization in multi-building environment. Appl. Sci. 2018, 8, 1062. [Google Scholar] [CrossRef] [Green Version]
- Xu, B.; Zhu, X.; Zhu, H. An efficient indoor localization method based on the long short-term memory recurrent neuron network. IEEE Access 2019, 7, 123912–123921. [Google Scholar] [CrossRef]
- Wu, L.; Chen, C.H.; Zhang, Q. A mobile positioning method based on deep learning techniques. Electronics 2019, 8, 59. [Google Scholar] [CrossRef] [Green Version]
- Hoang, M.T.; Yuen, B.; Dong, X.; Lu, T.; Westendorp, R.; Reddy, K. Recurrent Neural Networks for Accurate RSSI Indoor Localization. IEEE Internet Things J. 2019, 6, 10639–10651. [Google Scholar] [CrossRef] [Green Version]
- Carrino, F.; Janka, A.; Khaled, O.A.; Mugellini, E. LoRaLoc: Machine Learning-Based Fingerprinting for Outdoor Geolocation using LoRa. In Proceedings of the 2019 6th Swiss Conference on Data Science (SDS), Bern, Switzerland, 14 June 2019; pp. 82–86. [Google Scholar]
- Javed, A.; Larijani, H.; Ahmadinia, A.; Emmanuel, R.; Mannion, M.; Gibson, D. Design and Implementation of a Cloud Enabled Random Neural Network-Based Decentralized Smart Controller with Intelligent Sensor Nodes for HVAC. IEEE Internet Things J. 2017, 4, 393–403. [Google Scholar] [CrossRef] [Green Version]
- Javed, A.; Larijani, H.; Wixted, A.; Emmanuel, R. Random neural networks based cognitive controller for HVAC in non-domestic building using LoRa. In Proceedings of the 2017 IEEE 16th International Conference on Cognitive Informatics & Cognitive Computing (ICCI* CC), Oxford, UK, 26–28 July 2017; pp. 220–226. [Google Scholar]
- Javed, A.; Larijani, H.; Ahmadinia, A.; Gibson, D. Smart Random Neural Network Controller for HVAC Using Cloud Computing Technology. IEEE Trans. Ind. Inform. 2017, 13, 351–360. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, J.; Larijani, H.; Emmanuel, R.; Mannion, M.; Javed, A.; Phillipson, M. Energy demand prediction through novel random neural network predictor for large non-domestic buildings. In Proceedings of the 2017 Annual IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 24–27 April 2017; pp. 1–6. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. In Proceedings of the 3rd International Conference on Learning Representations (ICLR 2015), San Diego, CA, USA, 7–9 May 2015; pp. 1–14. [Google Scholar]
- Qureshi, A.U.H.; Larijani, H.; Javed, A.; Mtetwa, N.; Ahmad, J. Intrusion Detection Using Swarm Intelligence. In Proceedings of the 2019 UK/China Emerging Technologies (UCET), Glasgow, UK, 21–22 August 2019; pp. 1–5. [Google Scholar]
- Qureshi, A.U.H.; Larijani, H.; Mtetwa, N.; Javed, A.; Ahmad, J. RNN-ABC: A new swarm optimization based technique for anomaly detection. Computers 2019, 8, 59. [Google Scholar] [CrossRef] [Green Version]
- Cerkez, C.; Aybay, I.; Halici, U. A digital neuron realization for the random neural network model. In Proceedings of the International Conference on Neural Networks (ICNN’97), Houston, TX, USA, 12 June 1997; Volume 2, pp. 1000–1004. [Google Scholar]
- Abdelbaki, H.; Gelenbe, E.; El-Khamy, S.E. Analog hardware implementation of the random neural network model. In Proceedings of the IEEE-INNS-ENNS International Joint Conference on Neural Networks, Como, Italy, 27 July 2000; Volume 4, pp. 197–201. [Google Scholar]
- Abdelbaki, H. Random Neural Network Simulator (Rnnsim) v. 2. Free Simulator. 1999. Available online: ftp://ftp.mathworks.com/pub/contrib/v5/nnet/rnnsimv2 (accessed on 30 August 2021).
- Mohamed, S.; Rubino, G. A study of real-time packet video quality using random neural networks. IEEE Trans. Circuits Syst. Video Technol. 2002, 12, 1071–1083. [Google Scholar] [CrossRef]
- Ingabire, W.; Larijani, H.; Gibson, R.M. LoRa RSSI Based Outdoor Localization in an Urban Area Using Random Neural Networks. In Intelligent Computing; Lecture Notes in Networks and Systems; Arai, K., Ed.; Springer: Cham, Switzerland, 2021; Volume 284. [Google Scholar] [CrossRef]
- Aernouts, M.; Berkvens, R.; Vlaenderen, K.V.; Weyn, M. Sigfox and LoRaWAN datasets for fingerprint localization in large urban and rural areas. Data 2018, 3, 13. [Google Scholar] [CrossRef] [Green Version]
- Gelenbe, E. Random Neural Networks with Negative and Positive Signal and Product Form Solution. Neural Comput. 1989, 1, 502–510. [Google Scholar] [CrossRef]
- Rafael Palacios. Deg2utm. MATLAB Central File Exchange. Available online: https://www.mathworks.com/matlabcentral/fileexchange/10915-deg2utm (accessed on 30 August 2021).
- Bonafini, F.; Carvalho, D.F.; Depari, A.; Ferrari, P.; Flammini, A.; Pasetti, M.; Rinaldi, S.; Sisinni, E. Evaluating indoor and outdoor localization services for LoRaWAN in Smart City applications. In Proceedings of the 2019 II Workshop on Metrology for Industry 4.0 and IoT (MetroInd4. 0&IoT), Naples, Italy, 4–6 June 2019; pp. 300–305. [Google Scholar]
- Du, H.; Zhang, C.; Ye, Q.; Xu, W.; Kibenge, P.L.; Yao, K. A hybrid outdoor localization scheme with high-position accuracy and low-power consumption. Eurasip J. Wirel. Commun. Netw. 2018, 2018, 4. [Google Scholar] [CrossRef] [Green Version]
- Shokry, A.; Torki, M.; Youssef, M. DeepLoc: A Ubiquitous Accurate and Low-Overhead Outdoor Cellular Localization System. In Proceedings of the 26th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Seattle, WA, USA, 6–9 November 2021; pp. 27–29. [Google Scholar]
- Anjum, M.; Khan, M.A.; Hassan, S.A.; Mahmood, A.; Qureshi, H.K. RSSI Fingerprinting-based Localization Using Machine Learning in LoRa Networks. IEEE Internet Things Mag. 2020, 3, 53–59. [Google Scholar] [CrossRef]
- Purohit, J.N.; Wang, X. LoRa Based Localization Using Deep Learning Techniques; California State University: Long Beach, CA, USA, 2019. [Google Scholar]
- Janssen, T.; Aernouts, M.; Berkvens, R.; Weyn, M. Outdoor Fingerprinting Localization using Sigfox. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018. [Google Scholar] [CrossRef]
- Nguyen, T.A. LoRa Localisation in Cities with Neural Networks; Delft University of Technology: Delft, The Netherlands, 2019; p. 71. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Learning Rate | Mean Localization Error (m) |
|---|---|
| 0.001 | 0.291 |
| 0.01 | 0.294 |
| 0.1 | 0.297 |
| 1 | 0.295 |
| Samples | Mean Localization Error (m) |
|---|---|
| 1000 | 0.356 |
| 3000 | 0.308 |
| 5000 | 0.312 |
| 10,000 | 0.314 |
| 15,000 | 0.3 |
| Research Work | Mean Localization Error (m) | Approach |
|---|---|---|
| Proposed RNN-based localization system | 0.29 | RNN |
| Ingabire et al. [45] | 0.39 | RNN |
| Bonafini et al. [49] | 6.2 | Multilateration |
| Du et al. [50] | 7.57 | Hybrid |
| Shokry et al. [51] | 18.8 | Deep learning |
| Anjum et al. [52] | 45.75 | Linear |
| Purohit et al. [53] | 191.52 | ANN-Deep |
| Janssen et al. [54] | 340 | kNN |
| Aernouts et al. [46] | 398.4 | kNN |
| Anagnostopoulos et al. [8] | 358 | ANN |
| Nguyen [55] | 500 | ANN |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ingabire, W.; Larijani, H.; Gibson, R.M.; Qureshi, A.-U.-H. Outdoor Node Localization Using Random Neural Networks for Large-Scale Urban IoT LoRa Networks. Algorithms 2021, 14, 307. https://doi.org/10.3390/a14110307
Ingabire W, Larijani H, Gibson RM, Qureshi A-U-H. Outdoor Node Localization Using Random Neural Networks for Large-Scale Urban IoT LoRa Networks. Algorithms. 2021; 14(11):307. https://doi.org/10.3390/a14110307
Chicago/Turabian StyleIngabire, Winfred, Hadi Larijani, Ryan M. Gibson, and Ayyaz-UI-Haq Qureshi. 2021. "Outdoor Node Localization Using Random Neural Networks for Large-Scale Urban IoT LoRa Networks" Algorithms 14, no. 11: 307. https://doi.org/10.3390/a14110307
APA StyleIngabire, W., Larijani, H., Gibson, R. M., & Qureshi, A.-U.-H. (2021). Outdoor Node Localization Using Random Neural Networks for Large-Scale Urban IoT LoRa Networks. Algorithms, 14(11), 307. https://doi.org/10.3390/a14110307