Generalized Polynomial Chaos Expansion for Fast and Accurate Uncertainty Quantification in Geomechanical Modelling




Abstract
1. Introduction
2. Mathematical Framework
2.1. Geomechanical Governing Equations and Model Parameterization
2.2. gPCE Surrogate Model
2.3. Sobol’ Indices in the gPCE Framework
2.4. gPCE-ES and gPCE-MDA
3. Numerical Results
| Algorithm 1 gPCE-ES and gPCE-MDA for the forward model . |
|
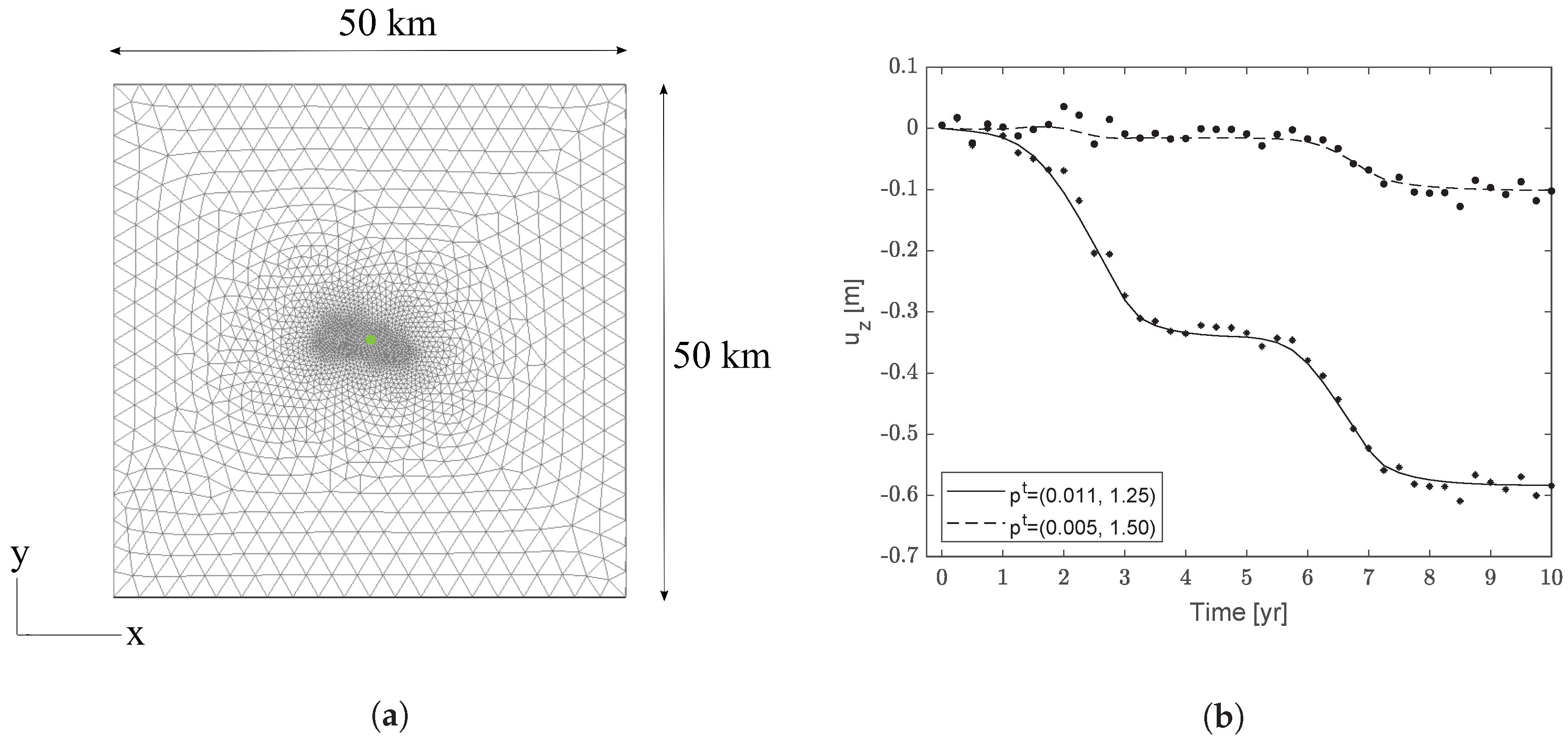
3.1. Model Set-Up and Random Parameters
3.2. gPCE Surrogate Model
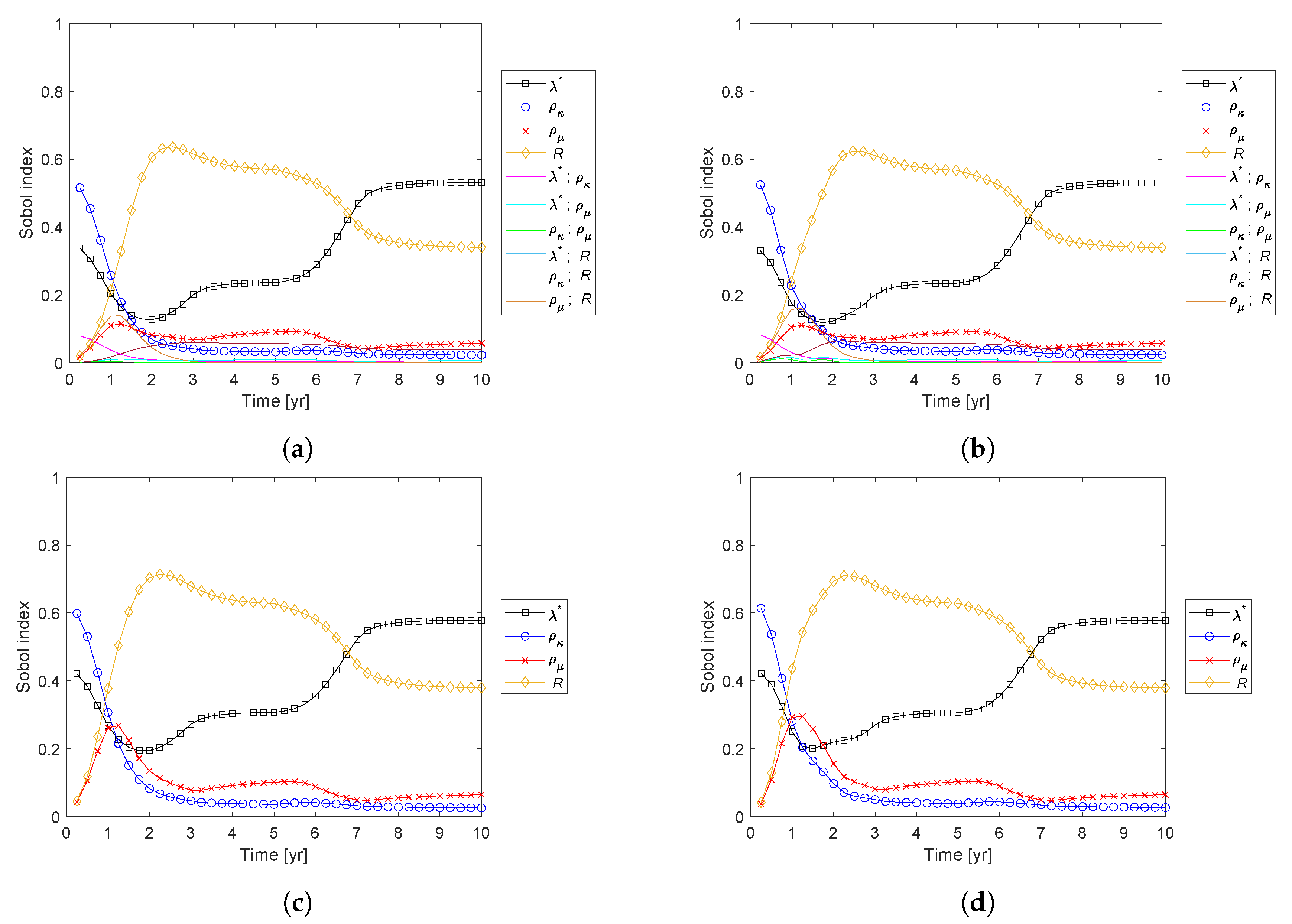
3.3. Sensitivity Analysis
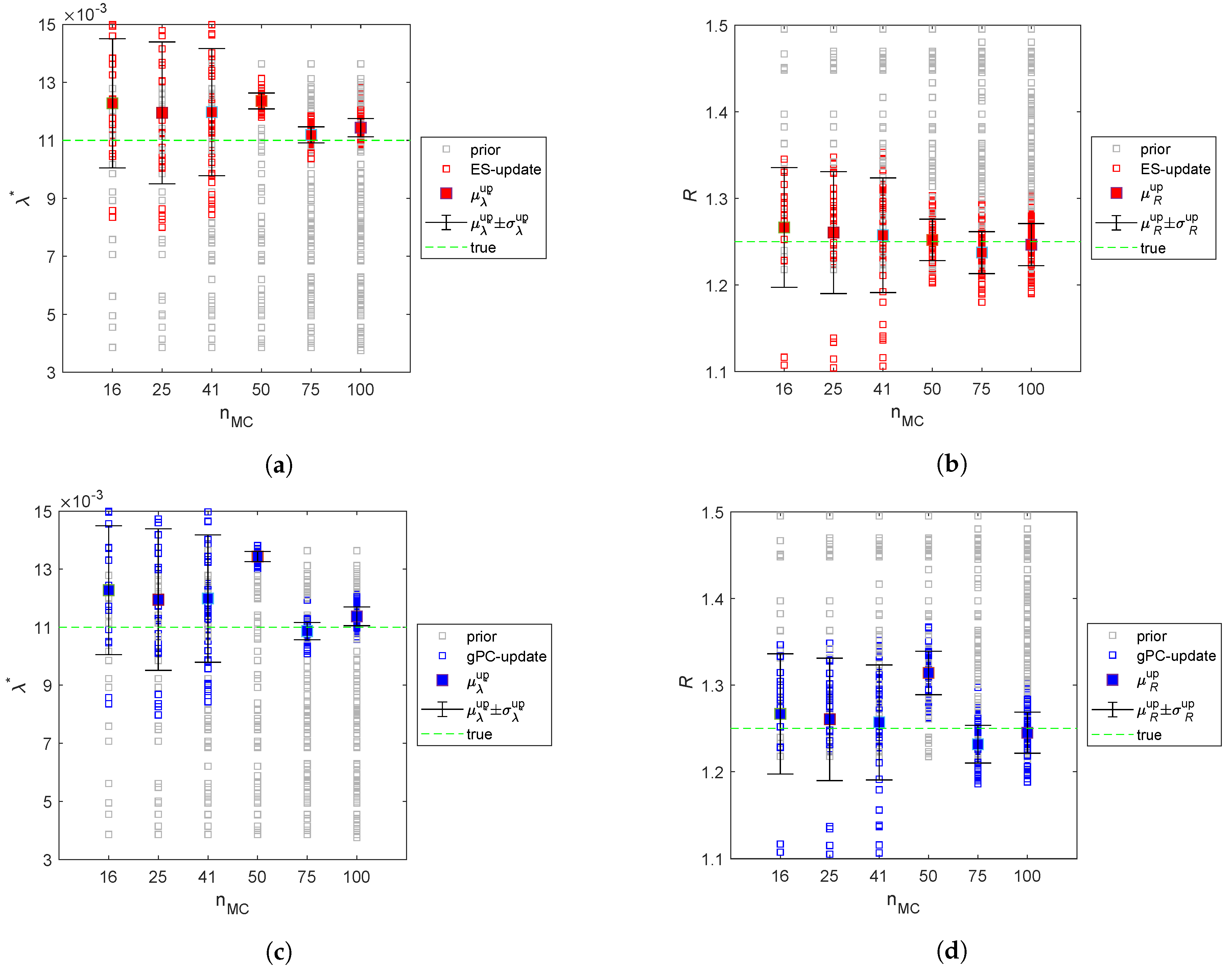
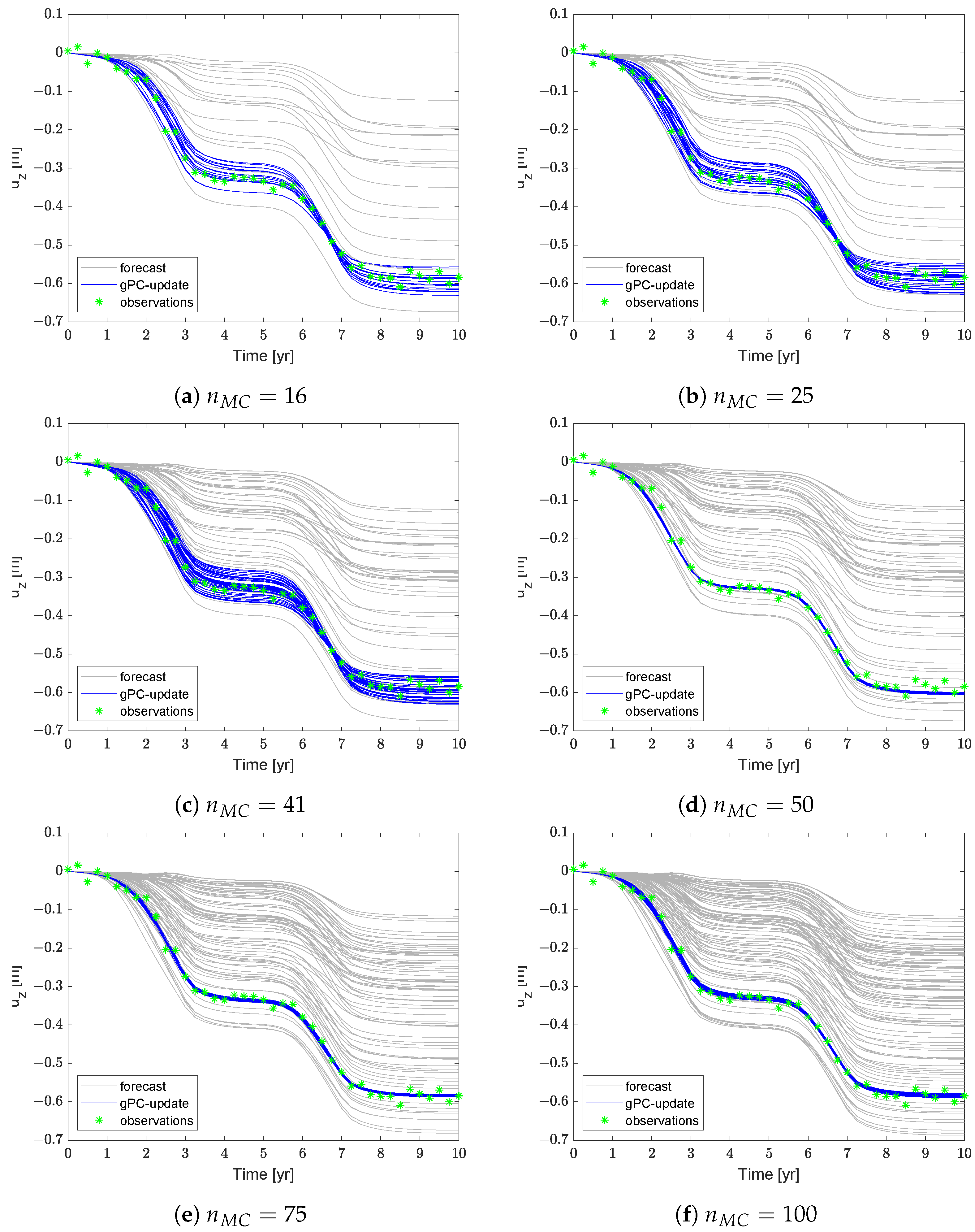
3.4. Bayesian Update
3.4.1. ES and gPCE-ES
3.4.2. gPCE-MDA
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| UQ | Uncertainty Quantification |
| SA | Sensitivity Analysis |
| ES | Ensemble Smoother |
| FE | Finite Element |
| gPCE | generalized Polynomial Chaos Expansion |
| MC | Monte Carlo |
| MDA | Multiple Data Assimilation |
| PSI | Permanent Scatterer Interferometry |
| VN | Vermeer-Neher |
References
- Gambolati, G.; Ferronato, M.; Teatini, P.; Deidda, R.; Lecca, G. Finite element analysis of land subsidence above depleted reservoirs with pore pressure gradient and total stress formulations. Int. J. Numer. Anal. Methods Geomech. 2001, 25, 307–327. [Google Scholar] [CrossRef]
- Spiezia, N.; Ferronato, M.; Janna, C.; Teatini, P. A two-invariant pseudoelastic model for reservoir compaction. Int. J. Numer. Anal. Methods Geomech. 2017, 41, 1870–1893. [Google Scholar] [CrossRef]
- Isotton, G.; Teatini, P.; Ferronato, M.; Janna, C.; Spiezia, N.; Mantica, S.; Volontè, G. Robust numerical implementation of a 3D rate-dependent model for reservoir geomechanical simulations. Int. J. Numer. Anal. Methods Geomech. 2019, 43, 2752–2771. [Google Scholar] [CrossRef]
- Lanier, J.; Caillerie, D.; Chambon, R.; Viggiani, G.; Bésuelle, P.; Desrues, J. A general formulation of hypoplasticity. Int. J. Numer. Anal. Methods Geomech. 2004, 28, 1461–1478. [Google Scholar] [CrossRef]
- Chandong, C.; Zoback, M. Viscous creep in room-dried unconsolidated Gulf of Mexico shale (II): Development of a viscoplasticity model. J. Pet. Sci. Eng. 2010, 72, 50–55. [Google Scholar] [CrossRef]
- Oka, F.; Kimoto, S.; Higo, Y.; Ohta, H.; Sanagawa, T.; Kodaka, T. An elasto-viscoplastic model for diatomaceous mudstone and numerical simulation of compaction bands. Int. J. Numer. Anal. Methods Geomech. 2011, 35, 244–263. [Google Scholar] [CrossRef]
- Cassiani, G.; Brovelli, A.; Hueckel, T. A strain-rate-dependent modified Cam-Clay model for the simulation of soil/rock compaction. Geomech. Energy Environ. 2017, 11, 42–51. [Google Scholar] [CrossRef]
- Nguyen, S.K.; Volontè, G.; Musso, G.; Brignoli, M.; Gemelli, F.; Mantica, S. Implementation of an elasto-viscoplastic constitutive law in Abaqus/Standard for an improved characterization of rock materials. In Proceedings of the 51st U.S. Rock Mechanics/Geomechanics Symposium, San Francisco, CA, USA, 25–28 June 2017. [Google Scholar]
- Ferronato, M.; Castelletto, N.; Gambolati, G.; Janna, C.; Teatini, P. II cycle compressibility from satellite measurements. Geotechnique 2013, 63, 479. [Google Scholar] [CrossRef]
- Zoccarato, C.; Baù, D.; Ferronato, M.; Gambolati, G.; Alzraiee, A.; Teatini, P. Data assimilation of surface displacements to improve geomechanical parameters of gas storage reservoirs. J. Geophys. Res. Solid Earth 2016, 121. [Google Scholar] [CrossRef]
- Zoccarato, C.; Baù, D.; Bottazzi, F.; Ferronato, M.; Gambolati, G.; Mantica, S.; Teatini, P. On the importance of the heterogeneity assumption in the characterization of reservoir geomechanical properties. Geophys. J. Int. 2016, 207, 47–58. [Google Scholar] [CrossRef]
- Fokker, P.A.; Wassing, B.B.; van Leijen, F.J.; Hanssen, R.F.; Nieuwland, D.A. Application of an ensemble smoother with multiple data assimilation to the Bergermeer gas field, using PS-InSAR. Geomech. Energy Environ. 2016, 5, 16–28. [Google Scholar] [CrossRef]
- Gazzola, L.; Ferronato, M.; Frigo, M.; Janna, C.; Teatini, P.; Zoccarato, C.; Antonelli, M.; Corradi, A.; Dacome, M.; Mantica, S. Uncertainty quantification and reduction through Data Assimilation approaches for the geomechanical modeling of hydrocarbon reservoirs. In Proceedings of the 53rd US Rock Mechanics Geomechanics Symposium ARMA, New York, NY, USA, 23–26 June 2019. [Google Scholar]
- Emerick, A.; Reynolds, A. Ensemble smoother with multiple data assimilation. Comput. Geosci. 2013, 55, 3–15. [Google Scholar] [CrossRef]
- Bottazzi, F.; Della Rossa, E. A Functional Data Analysis Approach to Surrogate Modeling in Reservoir and Geomechanics Uncertainty Quantification. Math. Geosci. 2017, 49, 517–540. [Google Scholar] [CrossRef]
- Botti, M.; Pietro, D.A.D.; Maître, O.L.; Sochala, P. Numerical approximation of poroelasticity with random coefficients using Polynomial Chaos and Hybrid High-Order methods. Comput. Methods Appl. Mech. Eng. 2019, 361, 112736. [Google Scholar] [CrossRef]
- Ganesh, A.; Zhang, B.; Chalaturnyk, R.J.; Prasad, V. Uncertainty quantification of the factor of safety in a steam-assisted gravity drainage process through polynomial chaos expansion. Comput. Chem. Eng. 2020, 133, 106663. [Google Scholar] [CrossRef]
- Castiñeira, D.; Jha, B.; Juanes, R. Uncertainty Quantification and Inverse Modeling of Fault Poromechanics and Induced Seismicity: Application to a Synthetic Carbon Capture and Storage (CCS) Problem. In Proceedings of the ARMA-2016-151, American Rock Mechanics Association, 50th U.S. Rock Mechanics/Geomechanics Symposium, Houston, TX, USA, 26–29 June 2016. [Google Scholar]
- Zoccarato, C.; Ferronato, M.; Franceschini, A.; Janna, C.; Teatini, P. Modeling fault activation due to fluid production: Bayesian update by seismic data. Comput. Geosci. 2019, 23, 705–722. [Google Scholar] [CrossRef]
- Verde, A. Global Sensitivity Analysis of Geomechanical Fractured Reservoir Parameters. In Proceedings of the 49th U.S. Rock Mechanics/Geomechanics Symposium, San Francisco, CA, USA, 28 June–1 July 2015; American Rock Mechanics Association: Alexandria, VA, USA, 2015. [Google Scholar]
- Rezaei, A.; Nakshatrala, K.B.; Siddiqui, F.; Dindoruk, B.; Soliman, M. A global sensitivity analysis and reduced-order models for hydraulically fractured horizontal wells. Comput. Geosci. 2020. [Google Scholar] [CrossRef]
- Wiener, N. The homogeneous chaos. Am. J. Math. 1938, 60, 897–936. [Google Scholar] [CrossRef]
- Ghanem, R.G.; Spanos, P.D. Stochastic Finite Elements: A Spectral Approach; Springer: New York, NY, USA, 1991; (Reedited by Dover Publications: Mineola: NY, USA, 2003). [Google Scholar]
- Xiu, D.; Karniadakis, G. The Wiener-Askey polynomial chaos for stochastic differential equations. SIAM J. Sci. Comput. 2002, 24, 619–644. [Google Scholar] [CrossRef]
- Najm, H.N. Uncertainty Quantification and Polynomial Chaos Techniques in Computational Fluid Dynamics. Annu. Rev. Fluid Mech. 2009, 41, 35–52. [Google Scholar] [CrossRef]
- Le Maître, O.P.; Knio, O.M. Spectral Methods for Uncertainty Quantification: With Applications to Computational Fluid Dynamics; Scientific Computation, Springer: Dordrecht, The Netherlands, 2010. [Google Scholar] [CrossRef]
- Xiu, D. Numerical Methods for Stochastic Computations A Spectral Method Approach; Princeton University Press: Princeton, NJ, USA, 2010. [Google Scholar]
- Ghanem, R. Stochastic finite elements with multiple random non-Gaussian properties. J. Eng. Mech. 1999, 125, 26–40. [Google Scholar] [CrossRef]
- Sudret, B.; Berveiller, M. Stochastic finite element methods in geotechnical engineering. In Reliability-Based Design in Geotechnical Engineering: Computations and Applications; Taylor & Francis: New York, NY, USA, 2008; pp. 260–297. [Google Scholar]
- Li, W.; Lu, Z.; Zhang, D. Stochastic analysis of unsaturated flow with probabilistic collocation method. Water Resour. Res. 2009, 45, 1–13. [Google Scholar] [CrossRef]
- Fajraoui, N.; Ramasomanana, F.; Younes, A.; Mara, T.A.; Ackerer, P.; Guadagnini, A. Use of global sensitivity analysis and polynomial chaos expansion for interpretation of nonreactive transport experiments in laboratory-scale porous media. Water Resour. Res. 2011, 47, W02521. [Google Scholar] [CrossRef]
- Oladyshkin, S.; Class, H.; Helmig, R.; Nowak, W. An integrative approach to robust design and probabilistic risk assessment for CO2 storage in geological formations. Comput. Geosci. 2011, 15, 565–577. [Google Scholar] [CrossRef]
- Formaggia, L.; Guadagnini, A.; Imperiali, I.; Lever, V.; Porta, G.; Riva, M.; Scotti, A.; Tamellini, L. Global sensitivity analysis through polynomial chaos expansion of a basin-scale geochemical compaction model. Comput. Geosci. 2013, 17, 25–42. [Google Scholar] [CrossRef]
- Deman, G.; Konakli, K.; Sudret, B.; Kerrou, J.; Perrochet, P.; Benabderrahmane, H. Using sparse polynomial chaos expansions for the global sensitivity analysis of groundwater lifetime expectancy in a multi-layered hydrogeological model. Reliab. Eng. Syst. Saf. 2016, 147, 156–169. [Google Scholar] [CrossRef]
- Maina, F.Z.; Guadagnini, A. Uncertainty quantification and global sensitivity analysis of subsurface flow parameters to gravimetric variations during pumping tests in unconfined aquifers. Water Resour. Res. 2018, 54, 501–518. [Google Scholar] [CrossRef]
- Li, J.; Xiu, D. A generalized polynomial chaos based ensemble Kalman filter with high accuracy. J. Comput. Phys. 2009, 228, 5454–5469. [Google Scholar] [CrossRef]
- Marzouk, Y.; Xiu, D. A stochastic collocation approach to Bayesian inference in inverse problems. Commun. Comput. Phys. 2009, 6, 826–847. [Google Scholar] [CrossRef]
- Saad, G.; Ghanem, R. Characterization of reservoir simulation models using a polynomial chaos-based ensemble Kalman filter. Water Resour. Res. Available online: https://agupubs.onlinelibrary.wiley.com/doi/epdf/10.1029/2008WR007148 (accessed on 15 May 2020). [CrossRef]
- Oladyshkin, S.; Class, H.; Nowak, W. Bayesian updating via bootstrap filtering combined with data-driven polynomial chaos expansions: Methodology and application to history matching for carbon dioxide storage in geological formations. Comput. Geosci. 2013, 17, 671–687. [Google Scholar] [CrossRef]
- Elsheikh, A.H.; Hoteit, I.; Wheeler, M.F. Efficient Bayesian inference of subsurface flow models using nested sampling and sparse polynomial chaos surrogates. Comput. Methods Appl. Mech. Eng. 2014, 269, 515–537. [Google Scholar] [CrossRef]
- Biot, M.A. General theory of three-dimensional consolidation. J. Appl. Phys. 1941, 12, 155–164. [Google Scholar] [CrossRef]
- Coussy, O. Poromechanics; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Vermeer, P.; Neher, H. A soft soil model that accounts for creep. In Proceedings of the International Symposium “Beyond 2000 in Computational Geotechnics”, Amsterdam, The Netherlands, 18–20 March 1999; pp. 249–261. [Google Scholar]
- Xiu, D. Efficient collocational approach for parametric uncertainty analysis. Commun. Comput. Phys. 2007, 2, 293–309. [Google Scholar]
- Sobol’, I. Sensitivity estimates for nonlinear mathematical models. Mat. Model. 1990, 2, 112–118, (in English in Sobol’ (1993)). [Google Scholar]
- Saltelli, A.; Marco, R.; Andres, T.; Campolongo, F.; Cariboni, J.; Gatelli, D.; Saisana, M.; Tarantola, S. Global Sensitivity Analysis. The Primer; John Wiley & Sons, Ltd.: Chichester, UK, 2007. [Google Scholar] [CrossRef]
- Sudret, B. Global sensitivity analysis using polynomial chaos expansions. Reliab. Eng. Syst. Saf. 2008, 93, 964–979. [Google Scholar] [CrossRef]
- Crestaux, T.; Le Maître, O.; Martinez, J.M. Polynomial chaos expansion for sensitivity analysis. Reliab. Eng. Syst. Saf. 2009, 94, 1161–1172. [Google Scholar] [CrossRef]
- Van Leeuwen, P.; Evensen, G. Data assimilation and inverse methods in terms of a probabilistic formulation. Mon. Weather. Rev. 1996, 124, 2898–2913. [Google Scholar] [CrossRef]
- Emerick, A.; Reynolds, A. History matching time-lapse seismic data using the ensemble Kalman filter with multiple data assimilation. Comput. Geosci. 2012, 16, 639–659. [Google Scholar] [CrossRef]
- Emerick, A. Analysis of the performance of ensemble-based assimilation of production and seismic data. J. Pet. Sci. Eng. 2016, 139, 219–239. [Google Scholar] [CrossRef]
- Evensen, G. Analysis of iterative ensemble smoothers for solving inverse problems. Comput. Geosci. 2018, 22, 885–908. [Google Scholar] [CrossRef]
- Baù, D.; Ferronato, M.; Gambolati, G.; Teatini, P. Basin-scale compressibility of the Northern Adriatic by the radioactive marker technique. Geotechnique 2002, 52, 605–616. [Google Scholar] [CrossRef]
- Smolyak, S.A. Quadrature and Interpolation Formulas for Tensor Products of Certain Classes of Functions. Dokl. Akad. Nauk SSSR 1963, 148, 1042–1043. [Google Scholar]
- Constantine, P.; Eldred, M.; Phipps, E. Sparse pseudospectral approximation method. Comput. Methods Appl. Mech. Eng. 2012, 229–232, 1–12. [Google Scholar] [CrossRef]
- Conrad, P.R.; Marzouk, Y.M. Adaptive Smolyak pseudospectral approximations. SIAM J. Sci. Comput. 2013, 35, A2643–A2670. [Google Scholar] [CrossRef]
- Blatman, G. Adaptive Sparse Polynomial Chaos Expansions for Uncertainty Propagation and Sensitivity Analysis. Ph.D. Thesis, Université Blaise Pascal, Clermont-Ferrand, France, 2009. [Google Scholar]
- Sudret, B. Polynomial chaos expansions and stochastic finite element methods. In Risk and Reliability in Geotechnical Engineering; CRC Press: Boca Raton, FL, USA, 2014; pp. 265–300. [Google Scholar]
- Borgonovo, E. A new uncertainty importance measure. Reliab. Eng. Syst. Saf. 2007, 92, 771–784. [Google Scholar] [CrossRef]
- Dell’Oca, A.; Riva, M.; Guadagnini, A. Moment-based metrics for global sensitivity analysis of hydrological systems. Hydrol. Earth Syst. Sci. 2017, 21, 6219–6234. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ( = 16) | ( = 81) | ( = 137) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| t [yr] | [m] | [m] | Q | [m] | [m] | Q | [m] | [m] | Q | ||
| 1 | −2.1× 10 | 2.0× 10 | 0.820 | −2.3× 10 | 3.1× 10 | 0.931 | −2.3× 10 | 3.0× 10 | 0.823 | ||
| 5 | −1.7× 10 | 1.4× 10 | 0.860 | −1.7× 10 | 1.5× 10 | 0.995 | −1.7× 10 | 1.5× 10 | 0.999 | ||
| 10 | −3.6× 10 | 2.6× 10 | 0.904 | −3.7× 10 | 2.8× 10 | 0.999 | −3.7× 10 | 2.8× 10 | 1.000 | ||
| ES | gPCE-ES | ||||||
|---|---|---|---|---|---|---|---|
| [m] | 0.1667 | 0.1642 | 0.1656 | 0.1667 | 0.1642 | 0.1656 | |
| [m] | 0.0190 | 0.0104 | 0.0099 | 0.0189 | 0.0117 | 0.0101 | |
| [m] | 0.0834 | 0.0836 | 0.0803 | 0.0833 | 0.0836 | 0.0803 | |
| [m] | 0.0149 | 0.0010 | 0.0016 | 0.0149 | 0.0010 | 0.0017 | |
| 0.0028 | 0.0029 | 0.0029 | 0.0028 | 0.0029 | 0.0029 | ||
| 0.0021 | 0.0014 | 0.0005 | 0.0021 | 0.0024 | 0.0004 | ||
| 0.0027 | 0.0025 | 0.0024 | 0.0027 | 0.0025 | 0.0024 | ||
| 0.0020 | 0.0002 | 0.0002 | 0.0020 | 0.0001 | 0.0003 | ||
| 0.1109 | 0.1065 | 0.1069 | 0.1109 | 0.1065 | 0.1069 | ||
| 0.0567 | 0.0186 | 0.0192 | 0.0568 | 0.0641 | 0.0184 | ||
| 0.0787 | 0.0724 | 0.0729 | 0.0787 | 0.0724 | 0.0729 | ||
| 0.0538 | 0.0186 | 0.0188 | 0.0538 | 0.0196 | 0.0182 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zoccarato, C.; Gazzola, L.; Ferronato, M.; Teatini, P. Generalized Polynomial Chaos Expansion for Fast and Accurate Uncertainty Quantification in Geomechanical Modelling. Algorithms 2020, 13, 156. https://doi.org/10.3390/a13070156
Zoccarato C, Gazzola L, Ferronato M, Teatini P. Generalized Polynomial Chaos Expansion for Fast and Accurate Uncertainty Quantification in Geomechanical Modelling. Algorithms. 2020; 13(7):156. https://doi.org/10.3390/a13070156
Chicago/Turabian StyleZoccarato, Claudia, Laura Gazzola, Massimiliano Ferronato, and Pietro Teatini. 2020. "Generalized Polynomial Chaos Expansion for Fast and Accurate Uncertainty Quantification in Geomechanical Modelling" Algorithms 13, no. 7: 156. https://doi.org/10.3390/a13070156
APA StyleZoccarato, C., Gazzola, L., Ferronato, M., & Teatini, P. (2020). Generalized Polynomial Chaos Expansion for Fast and Accurate Uncertainty Quantification in Geomechanical Modelling. Algorithms, 13(7), 156. https://doi.org/10.3390/a13070156