1. Introduction
Currently, with more and more data being generated every day at a rapid rate, Big Data applications are very popular. It is important to provide better data storage and processing for these applications. Recently, in addition to traditional relational databases, NoSQL databases [
1,
2] offer more flexible and higher performance, especially for data in irregular formats.
As one of the NoSQL databases, key-value stores (KVS) [
3] provide a simple, but efficient data access. KVS systems (e.g., Amazon Dynamo [
4], Facebook Cassandra [
5], and LinkedIn Voldemort [
6]) have been widely adopted for many data intensive applications. In a key-value store system, a data record consists of a
key and a
value. A
key is an index for identifying the data record. A
value stores the actual data of any type, such as numbers, web pages, or images. With a given
key, the data record can be quickly retrieved, changed, or deleted.
Recently, Seagate [
7] developed a new disk drive device called the “Kinetic Drive” [
8,
9]. Specifically designed for storing key-value pairs, the Kinetic Drive is an example of object-based storage devices (OSDs) [
10,
11] and active disks [
12,
13,
14]. With its own CPU, RAM, and built-in LevelDB system [
15], the Kinetic Drive can independently run key-value operations. The Kinetic Drive significantly changes the storage stack and data management for key-value stores. As shown in
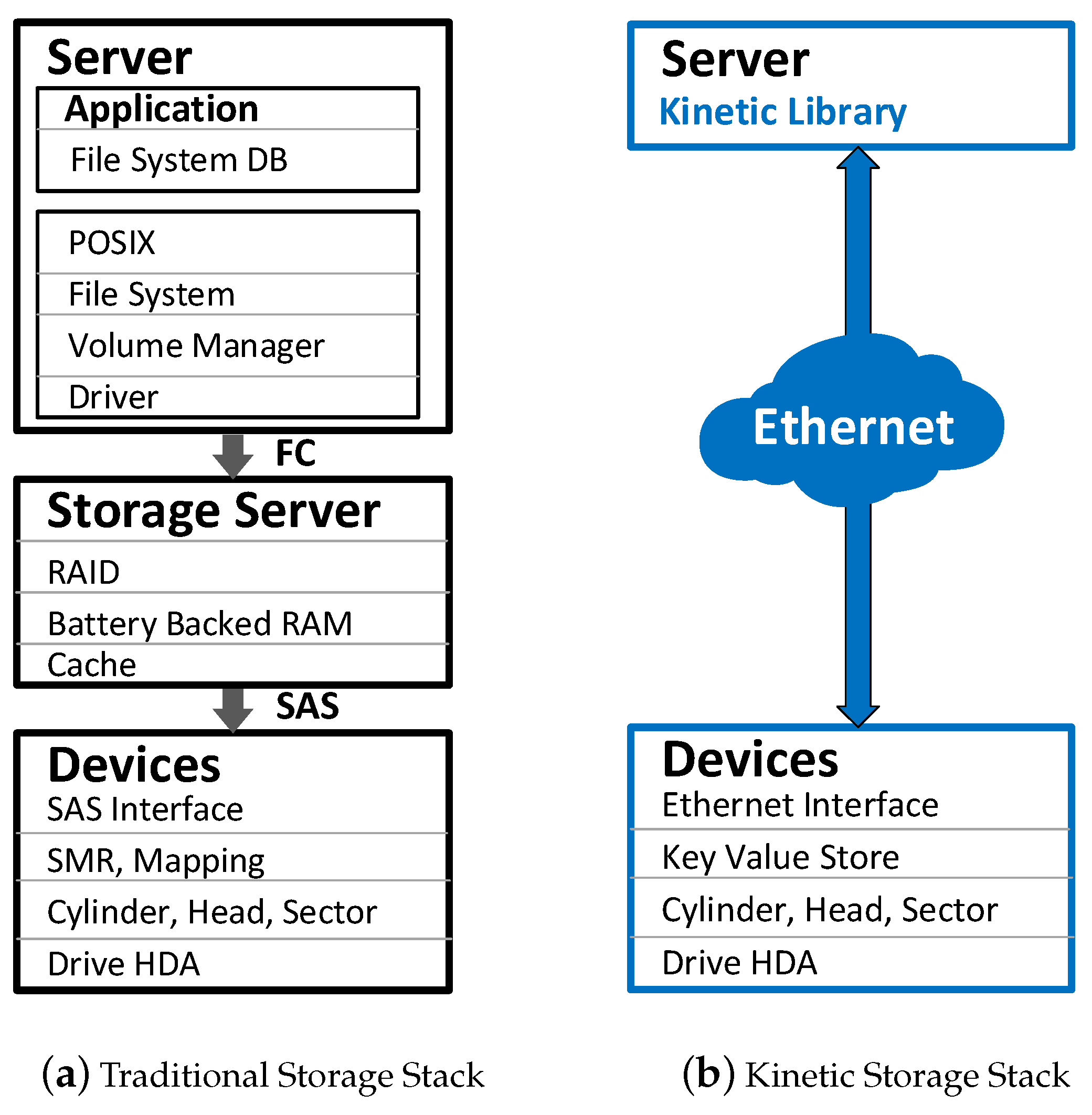
Figure 1a, there is a storage server in the traditional storage stack for accessing data stored in block-based disk drives. However, as shown in
Figure 1b, key-value pairs stored in Kinetic Drives can be directly accessed by the application via Ethernet connection. Hence, the Kinetic storage stack offers easy and flexible data access.
In Big Data environments, huge amounts of key-value data are generated from different regions worldwide. It is necessary to manage those data by a global key-value store system. Many Kinetic Drives form a very large pool of key-value store devices when they are connected to networks. Users should be provided with efficient data access by this global key-value store system. Given a key, this KVS system should quickly find which Kinetic Drive stores the data. In that case, we need metadata servers to manage key-value data stored in Kinetic Drives. Hence, this global KVS system requires a good design and architecture of data management for these metadata servers.
It is challenging to propose such data management for metadata servers in a global KVS system. First, it is important to map huge amounts of key-value pairs to Kinetic Drives in various regions. Second, data usually are stored in multiple copies in this global KVS system due to redundancy and fault tolerance requirements. Third, the fact that key-value pairs are dynamically received should be considered. Fourth, a location-aware design is necessary for quick data access. Fifth, the data management scheme should have a small and affordable overhead. Last but not least, with multiple metadata servers, coordination among them is needed. A good design should include these considerations.
This paper is an extended version of the work published in [
17]. In this paper, we propose a novel global key-value store system based on Kinetic Drives. Several indexing scheme designs of Kinetic Drives were proposed in [
16,
18], which only considered data allocation in a cluster from one location rather than focusing on a global system. In contrast, we offer a comprehensive design and architecture for a global key-value store system using Kinetic Drives among various regions.
The contributions of this paper are as follows.
A data management scheme with small storage overhead is proposed for metadata servers to manage Kinetic Drives in different regions.
A comprehensive solution is offered considering several practical aspects, such as data access, key indexing, data backup, and recovery.
Quick data access is provided by a location-aware design.
For the global KVS system, our solution includes the coordination among different metadata servers in various regions.
The rest of paper is organized as follows.
Section 2 gives the related work. In
Section 3, we introduce the background of Kinetic Drives.
Section 4 gives the motivation of this paper. In
Section 5, we propose our design and architecture. The numerical result of storage overhead is given in
Section 6. The performance evaluation is shown in
Section 7. Finally, we conclude our paper and present the future work in
Section 8.
2. Related Work
NoSQL databases [
1,
2] provide many Big Data applications with better performance, efficiency, and flexibility. Recently, many types of NoSQL databases have been developed, such as key-value stores [
3], column stores [
19,
20,
21], document stores [
22,
23,
24,
25], and graph databases [
26,
27,
28].
There are many large-scale key-value store systems, such as Amazon Dynamo [
4], Facebook Cassandra [
5], and LinkedIn Voldemort [
6]. In these KVS systems, data are stored in traditional block-based hard disk drives. Hence, it is necessary to have dedicated storage servers and/or layers to manage data. However, our global key-value store system in this paper is different from these existing systems. It is based on Kinetic Drives specifically designed for key-value pair data without dedicated storage servers/layers.
Object-based storage devices (OSDs) [
10,
11] manage data as objects rather than traditional data blocks. With more powerful CPU and memory, active disks [
12,
13,
14] have been designed to process data on disks to achieve better performance than traditional hard disk drives. Developed by Seagate [
7], the Kinetic Drive is an example and special case of OSDs and active disks. Some documents about Kinetic Drives were provided in [
8,
9]. Recently, the research work in [
29] compared the performance between Kinetic Drives and traditional hard disk drives. In [
16], the authors investigated the data allocation issues for Kinetic Drives in a cluster in one location and proposed multiple indexing schemes to manage data. The authors in [
18] considered Kinetic Drives’ bandwidth constraints and proposed the solution to allocate key-value pairs accordingly. Both research works in [
16,
18] only focused on a cluster of Kinetic Drives in one data center location, so that the solution did not consider a global-scale KVS system. In this paper, however, we focus on a global key-value store system with multiple regions and offer our design and architecture.
Many peer-to-peer (P2P) systems [
30,
31,
32,
33,
34] adopt the idea of key-value pairs. Although data in P2P systems are stored in key-value pair format, the goal of P2P is to offer file sharing, which is different from our paper. In this paper, our global key-value store system is to provide services for users to store and access data.
There are some other research works [
35,
36,
37,
38,
39] about various perspectives of key-value store systems. However, they did not consider Kinetic Drives as the storage devices. In this paper, we take advantage of Kinetic Drives and use them to build a global key-value store system, focusing on its design and architecture.
3. Background
3.1. Preliminaries of Kinetic Drives
Seagate recently announced the invention of Kinetic Drives [
8,
9].
Figure 1 shows the difference between traditional and Kinetic storage stacks. We can see that traditional hard disk drives are connected via an Serial Attached SCSI (SAS) or AT Attachment (ATA) interface, while Kinetic Drives are accessed via Ethernet connections. Currently, there are two Ethernet ports in a Kinetic Drive, and its storage capacity is 4 TB. Kinetic Drives support a
key size up to 4 KB and a
value size up to 1 MB for key-value pairs. With Ethernet connections and supported by TCP/IP, data stored in Kinetic Drives can be quickly accessed by users via the IP addresses of the drives using the following built-in APIs.
Get(key): Given a key, gets the key-value pair.
GetPrevious(key): Given a key, gets the previous key-value pair.
GetNext(key): Given a key, gets the next key-value pair.
GetKeyRange(key1, key2): Given key1 and key2, gets the key-value pairs in the range between them.
Put(key, value): Given a key and a value, stores the key-value pair.
Delete(key): Given a key, deletes the key-value pair.
With its own CPU, RAM, and built-in LevelDB system [
15], the Kinetic Drive manages data by sorting and storing key-value pairs in an order based on
keys. With a given
key, a Kinetic Drive can independently operate itself to perform key-value operations and directly returns the result to the user. Hence, we can see that a Kinetic Drive becomes a part of the storage resource pool for users to access data, when it is connected to the Internet.
In addition, there is a unique feature of Kinetic Drives—P2P operation. Direct data migration via P2P operation is available between two Kinetic Drives because they are accessed via IP addresses. Therefore, a P2P data transfer can be initiated from one Kinetic Drive to another, given the IP address of the destination drive. This direct P2P data transfer does not need any storage server as the intermediary.
3.2. Comparison between Traditional and Kinetic KVS Systems
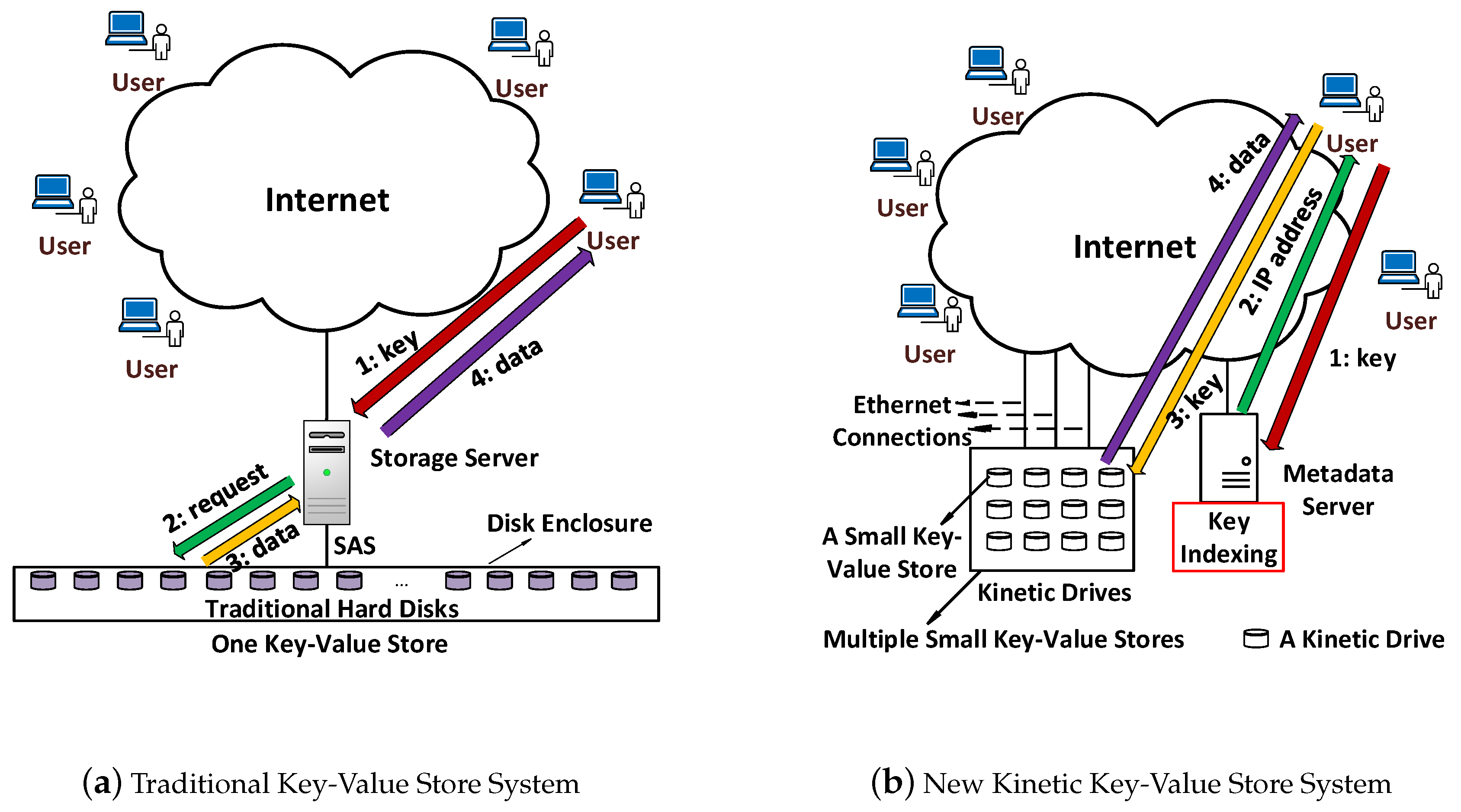
The comparison between traditional and Kinetic KVS systems is shown in
Figure 2 in detail. In traditional KVS, a storage server directly manages data stored in multiple disk drives. In
Figure 2a, a
key arrives first at the storage server, which finds the specific drive containing the key-value pair. Then, the storage server fetches those data and sends them to the user. Hence, the storage server is the intermediary for the actual data
value to go through.
It is different for the Kinetic KVS system. To manage a set of Kinetic Drives and find which drive stores the specific key-value pair, a metadata server is needed. This metadata server only maintains a mapping between
keys and the IP addresses of the Kinetic Drives, as shown in
Figure 2b. We can see that when a
key arrives at the metadata server, it finds the IP address of the Kinetic Drive storing that key-value pair and returns the IP to the user. Then, the user directly contacts the specific Kinetic Drive to access the key-value pair. Hence, the actual data
value does not need to go through the metadata server to arrive at the user.
3.3. Advantages and Impact of Kinetic Drives
The above architectural difference shown in
Figure 2 is crucial for reducing the amount of data going through the metadata server. Although
keys still have to arrive at the metadata server, the actual data (
values) do not. In key-value store systems, the
value size usually is much larger than the size of the
key. Hence, with the huge amount of key-value pairs in the whole system, the total data traffic going through the metadata server is significantly reduced.
Furthermore, the traditional KVS system consists of the storage server(s) and multiple hard disks drives, as shown in
Figure 2a. Those hard disk drives only store data, without the capability to process the key-value operations by themselves. However, in
Figure 2b, this new Kinetic KVS system actually has multiple small key-value stores plus a metadata server. Each Kinetic Drive is a small key-value store and is able to process key-value operations by itself independently. Hence, users can interact with Kinetic Drives in parallel so that the throughput is improved.
In addition, due to P2P operations, it is easier to migrate data among Kinetic Drives to further improve scalability. The metadata server does not even need to participate in the data transfer between two Kinetic Drives. In a large-scale deployment, this feature becomes especially important because of parallel data transfer among those drives. Therefore, the system can greatly mitigate the bottleneck effect of the server.
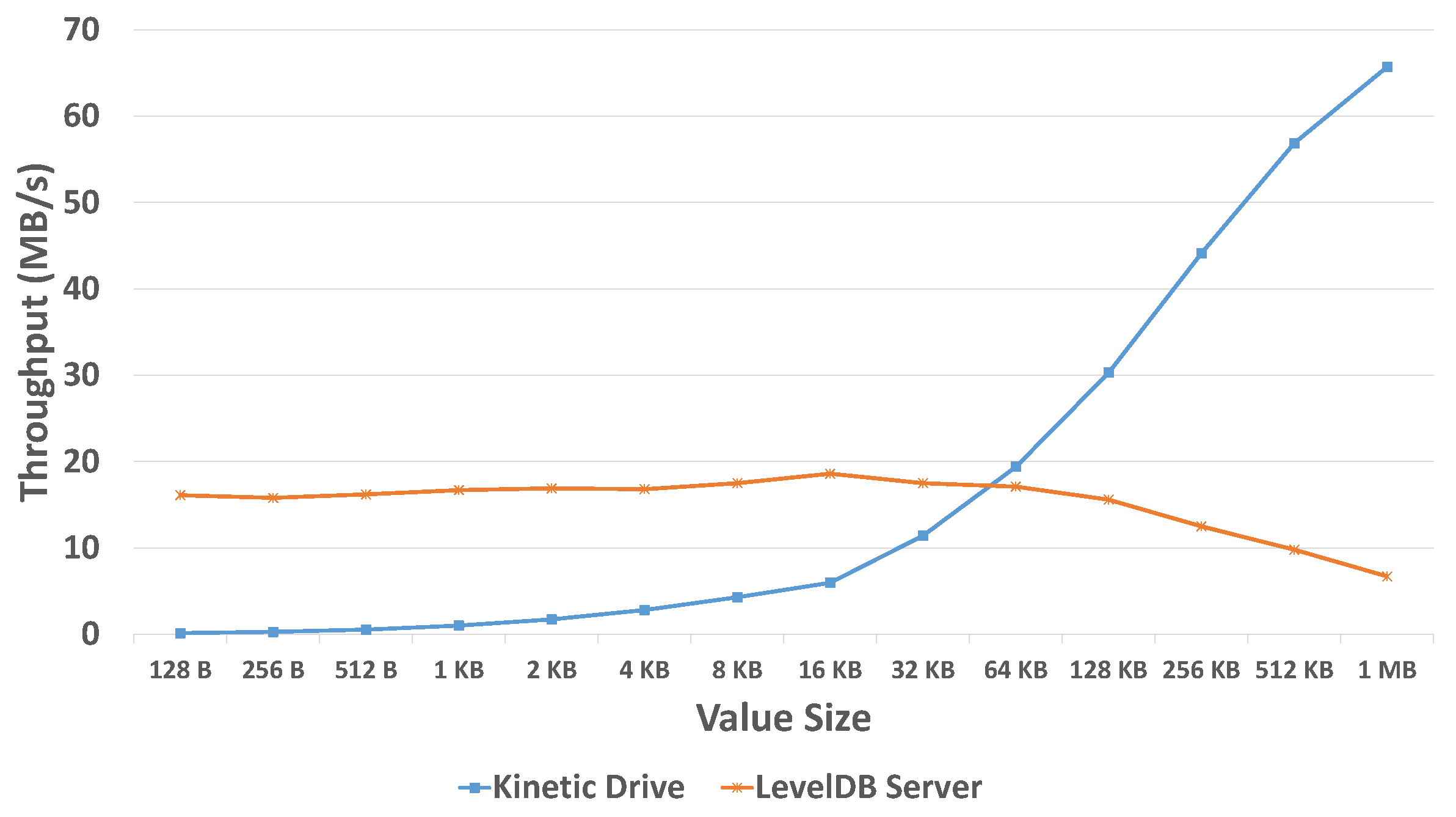
In [
29], experimental results showed different write throughput performed by a traditional KVS system and Kinetic Drives when the
sizes were changed, as shown in
Figure 3 as an example. We can see that when the
size is small, the traditional LevelDB server indeed has greater throughput. This is because the CPU of the dedicated storage server is more powerful than the CPU of the Kinetic Drive, so that the server processes data quicker. When the
size becomes larger, the amount of data also increases. Due to the internal LevelDB system, data access operations take place inside the Kinetic Drives. Therefore, for Kinetic Drives, those large amounts of data do not need to be frequently accessed by the storage server, so that the I/O traffic can be reduced. However, for the traditional LevelDB server, it still has to access data from/to disk drives, thus generating many I/O operations, which reduce the throughput. Hence, the throughput is greatly increased for Kinetic Drives with a larger
size.
3.4. Big Data and Kinetic Drives
Data volume is one of the important dimensions of the Big Data concept. The amount of data currently is huge and keeps growing at a rapid rate. In the Big Data environment, variety is another dimension. There are huge amounts of data sources. For example, in the Internet of Things environment, all kinds of “things” are generating data, such as vehicles, appliances, people, mobile devices, and industrial sensors. These different types of data sources have been generating data in various and irregular formats (e.g., videos, images, texts, numbers, and web pages).
To deal with various and irregular data formats, NoSQL databases usually offer more flexible and better performance than traditional SQL databases. As one of the NoSQL databases, the key-value store system provides a simple, but efficient data storage and access scheme. Key-value store systems have been widely used in many Big Data applications, such as Amazon Dynamo [
4], Facebook Cassandra [
5], and LinkedIn Voldemort [
6]. When those applications generate a data record such as a customer’s information or a user’s profile, it can be stored in a key-value pair format in those decentralized systems.
Kinetic Drives are specifically designed for key-value store systems to store key-value pair data. As mentioned previously, we can find that Kinetic Drives significantly change the data access mechanism for user-to-drive and drive-to-drive interactions. The performance of the entire large-scale KVS system can be improved by Kinetic Drives due to better parallelism and scalability.
Kinetic Drives can be widely deployed to replace traditional hard disk drives for key-value store systems. As shown in
Figure 1a,b, Kinetic Drives reduce the complexity of data access and storage. With proper metadata management schemes, those large-scale key-value store systems such as Amazon Dynamo [
4], Facebook Cassandra [
5], and LinkedIn Voldemort [
6] can use Kinetic Drives to improve the performance and reduce the overhead of the system. Furthermore, with Kinetic Drives, the Seagate Open Storage Platform [
40] can even work with storage in OpenStack (an open standard cloud computing platform) [
41], which is widely deployed in the cloud. Kinetic Drives can be the storage devices for key-value pair data, and our design in this paper offers scalable solutions for a global-scale key-value store system.
4. Motivation
Figure 4 shows data storing and retrieval by a user with only a cluster of Kinetic Drives. Based on the discussion above in this paper, we can see that a metadata server is needed for a cluster to find the destination drive.
Currently, in the Big Data environment, a huge amount of data sources worldwide is distributed in different regions and keeps generating key-value pairs. In order to store data and provide access, a global system with a large pool of Kinetic Drives is needed. Hence, similar to
Figure 4, metadata servers are required to manage those Kinetic Drives. Given a
key, the system should quickly find which Kinetic Drive in which region has stored the key-value pair. Furthermore, if this given
key is for a new key-value pair, the location of it to be stored should be decided as well. It is important to design a global KVS system for users in many regions to access data.
There is a naive approach that there is no mapping table between the keys and IP addresses of drives. In this case, given a key, all drives’ IP addresses are returned to the user by the metadata servers. However, this naive approach is unrealistic, because the user has to contact all the Kinetic Drives to search their data. This “exhaustive search” is not possible, considering the unacceptable cost and inefficiency of the amount of drives. Hence, the system needs an indexing scheme to map keys to IP addresses of drives.
On the other hand, it is also impractical to build a huge indexing table to map every key-value pair to the IP address of each Kinetic Drive. The key size a Kinetic Drive supports is up to 4 KB. If all the possible key-value pairs were mapped in the indexing table, there would be (= ) records, which is so large that they could not be stored in metadata servers, along with the huge search cost. This “exhaustive mapping” should be avoided as well, since the size of the indexing table(s) should be limited. We need to explore the tradeoff between these two extremes “exhaustive search” and “exhaustive mapping” for the indexing scheme design.
Practically, some crucial factors should be considered for a large-scale system, such as data backup, recovery, and coordination among metadata servers. For example, it is important to backup data from a drive to others in the case of data corruption and drive failure. Furthermore, with the Big Data scenario, more than one metadata server is needed. The coordination among them is necessary.
5. Design and Architecture
In this section, we present our design and architecture in detail.
5.1. Overview
The goal of our work is to present a global key-value store system. We assume the entire system is divided into multiple regions worldwide. We believe the concept of regions is important, similar to regions (e.g., U.S. East, Asia Pacific) in Amazon Web Services (AWS) [
43]. In each region, there is a group of Kinetic Drives that offers key-value pair storage and access. There are also many users dispersed globally in different locations, accessing key-value pairs stored in Kinetic Drives.
Figure 5 shows the overall picture of the system with
N regions.
In order to manage this group of Kinetic Drives for each region, a metadata server is needed. This metadata server is also the first contact for users in this region accessing data. We assume all the metadata servers worldwide know the IP addresses of each other.
In the real deployment, practically, there should be multiple synchronized metadata servers in each region for reliability and fault tolerance. In this paper, to better explain our design, we use a metadata server to represent these multiple ones in each region. In other words, we assume this one metadata server takes care of data management in its region. The data synchronization issues among metadata servers in a region are classical problems in distributed systems, and they are not unique for Kinetic Drives. In this paper, we focus on the coordination among metadata servers in different regions.
For redundancy and fault tolerance considerations, each drive in a region is assumed to have two backup drives in two other regions. In other words, each key-value pair has three copies distributed in three regions. In the rest of this paper, we use the term “original data” to represent the primary copy of the key-value pair. These original data are initially stored by users. The term “original drive” means the drive initially storing these original data as the primary copies. Furthermore, the terms “Backup 1” and “Backup 2” are used to indicate the first and second additional backup copies in two other regions. These backup copies are replicated by the KVS system based on the original data.
5.2. Indexing Scheme for Original Data
Several
key indexing schemes for a cluster of Kinetic Drives in one location were discussed in [
16]. This paper, in contrast, focuses on a global KVS system with multiple regions. In this paper, we generally follow one approach in [
16] to assign key-value pairs of the
original data to drives. Generally speaking, it maps the key-value pairs to drives based on
key ranges. Essentially, a
key consists of a series of bits 0 and 1. Furthermore, we apply the same idea to map key-value pairs to different regions. The impacts of other indexing schemes in [
16] are beyond this paper’s scope and will be considered as our future work.
In this paper, the keys are assumed to be randomly generated (e.g., a common way to generate a key is to apply a hash function on the value), so that they are more or less uniformly distributed. We use the prefix of a key to decide a key-value pair’s region. We assume there are N regions so that the first bits are used to make the decision. For example, if there are eight regions in total, then the region is decided by the first three bits of the key. The original data (primary copy) of the key-value pair whose key starts with “000” is stored in Region 0. Therefore, the mapping between prefixes of keys and regions works in the following way.
We apply the same method to locate which Kinetic Drive stores the key-value pair within a region. In one region, a part of the all the drives is used for storing
original data (primary copies), and the rest of the drives are for backup and other possible usages. The metadata server in each region maintains a table to map
key ranges to drives. If there are
M drives for storing original data in a region (of course, the number
M is variable among different regions), the additional
bits after the first
bits are used for locating the specific drive. In
Table 1, we show an example of Region 4 (eight regions in total), assuming 128 drives are used for storing
original data. In that case, we know that all the key-value pairs whose
keys start with “100” are stored in this region. The fourth to 10th bits decide the specific drive. Hence, the key-value pair whose
key starts with “
100 0000011” (indicating the
key range from “
100 0000011 0…” to “
100 0000011 1…”) is stored in the third drive (IP: 135.37.118.6) in Region 4 (drive numbers start from 0).
5.3. Initial Stage
When key-value pairs are generated, we use the above indexing scheme to store
original data in the drives at the initial stage.
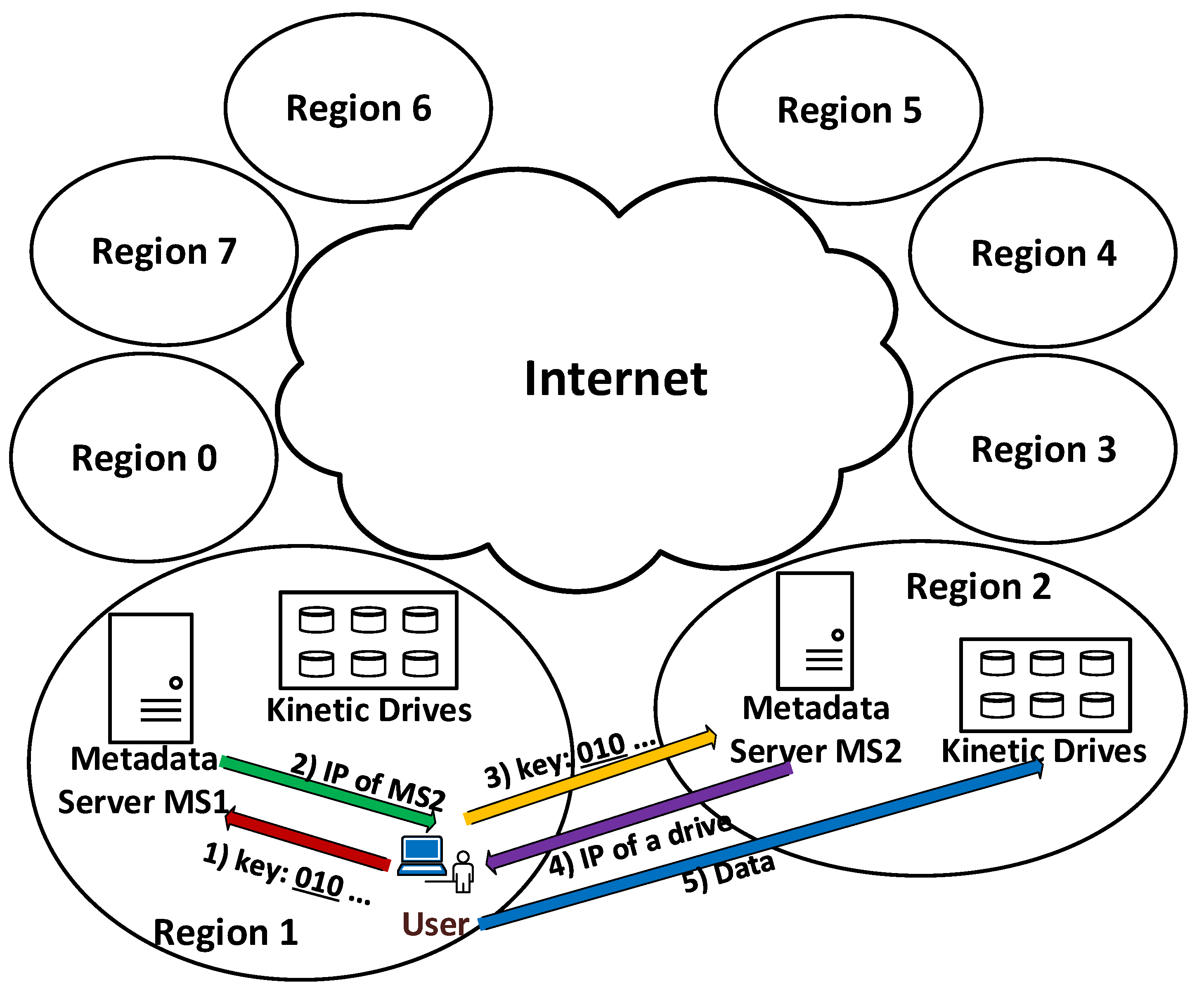
Figure 6 shows our system with multiple regions. At the very beginning, all drives in all regions are empty. When a user in Region 1 generates a key-value pair, it first contacts the metadata server MS1 of the user’s region by sending the
key. Based on the prefix of the
key, the metadata server MS1 looks at the
key and finds where (i.e., which region) this key-value pair should be stored (Region 2 in this case) as the
original data (primary copy).
The IP address of metadata server MS2 of Region 2 is returned to the user by the metadata server MS1. Next, the user sends the key to that metadata server MS2, which finds the specific drive that should store the key-value pair, based on additional bits after the first bits, as mentioned earlier. Then, metadata server MS2 returns the IP address of that particular Kinetic Drive to the user. Finally, the user directly contacts the drive via its IP address to store the key-value pair.
We can see that during this initial stage, only original data (primary copies) are stored without additional backup copies.
5.4. Preparation and Rules for Backup
For the practical deployment, it is likely that a drive can be backed up (locally) to the drive(s) in the same region for future quick data recovery. In that case, it is trivial that the metadata server just adds entries in the mapping table to reflect the backup. In this paper, we focus on location-aware data access so that we intentionally show how to backup data to drives in different regions. Although local backups in the same region can be helpful, sometimes, this inter-region backup can even provide more fault tolerance and resilience for the system.
For the purpose of backing up the original data to two different regions, the metadata server in each region keeps track of its drives’ access frequencies by users in all regions during the initial stage. For example, if a user from Region 2 accesses Drive 3 in Region 4 once, the metadata server (MS4) in Region 4 increases Drive 3’s access frequency from Region 2 by one. This information of data access can be easily maintained, because a metadata server has to be contacted first by a user. Hence, after the initial stage, metadata servers have clear knowledge about the access frequencies of all their drives accessed by all regions, which is helpful for backup. In this paper, we assume the initial stage is a relatively long enough period to gather data access information. The access frequencies afterwards are stable, so that they generally follow the statistics in the initial stage.
At some moment, a drive’s initial stage ends, when this drive is full or getting too full (e.g., reaching a threshold, such as 80% full). Then, backup and drive splitting happen. In this paper, the concepts of backup and drive splitting are different. Backup means that data in this drive are copied and transferred to two additional drives in two other regions. Drive splitting means that part of the data needs to be transferred to another drive (in the same region) to acquire more capacity for future storage.
We have the following rules for backup:
To reduce the overhead, instead of backing up key-value pairs one by one, the system backs up the entire drive in one shot when needed.
The first backup copy of the drive (i.e., Backup 1) is stored in another region by which the access frequency of this drive is the highest, after the initial stage. For example, we assume Drive 3 in Region 4 needs backup, and this drive is accessed mostly by users in Region 2. Hence, the first backup copy (Backup 1) of Drive 3 in Region 4 is a drive in Region 2. This rule considers the access frequency, so that Region 2’s users who frequently access data in Drive 3 of Region 4 do not have to interact with Region 4 for future access (instead, they can just access data from the backup drive in Region 2), so the distance and delay are reduced.
The second backup copy of the drive (i.e., Backup 2) is stored in another region, which is the farthest from the region of the original drive and the region chosen by the above rule (using the highest access frequency). For instance, following the above example, Region 5 is the farthest region from Regions 2 and 4. Then, the second backup copy (Backup 2) of Drive 3 in Region 4 is stored in a drive in Region 5. This rule is applied so that users physically far from Regions 2 and 4 can just access data in their closer region (i.e., Region 5) to reduce the distance and delay as well.
In this paper, we show our criteria to choose two backup drives for location-aware access. In the real deployment, these criteria could be changed for different requirements. We can find that backup copies are not only for fault tolerance, but also can help reduce distance and delay for data access.
5.5. Backup and Splitting
The system backs up a drive to two other regions, when this drive is full or getting too full for original data (primary copies). Based on the information of access frequencies and locations mentioned in the backup preparation and rules, the metadata server of this drive knows the destinations (which two regions) of two backup copies. Hence, it contacts two other metadata servers of those two regions.
After that, each of these two other metadata servers finds an empty drive in its region and returns its IP address to the metadata server of the original drive that needs backup. Then, this original drive gets those two drives’ IP addresses and initiates P2P data transfer operations to them to backup (copy) the data. The data transfer from a drive to another drive does not need a metadata server as the intermediary. As long as the original drive knows the IP address of the destination drive from the metadata server, P2P data transfer can be started and finished.
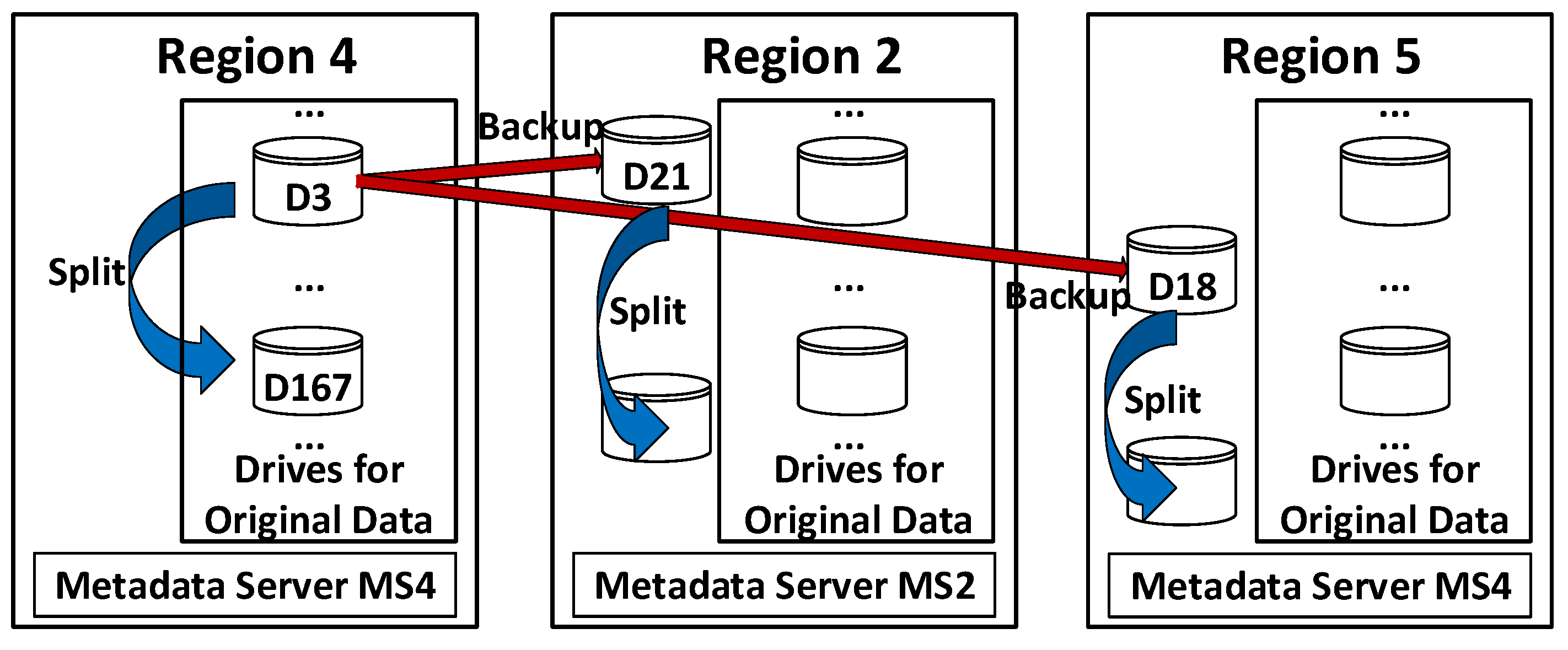
An example of backup and splitting is shown in
Figure 7. We can see that Drive 3 in Region 4 needs to be backed up. Based on the backup rules, the metadata server MS4 of Region 4 knows that the destinations for backup should be two empty drives in Region 2 and Region 5, respectively. Then, MS4 contacts the metadata server MS2 of Region 2 and the metadata server MS5 of Region 5. Next, MS2 and MS5 find within their regions that drive D21 and drive D18 are empty drives for backup data respectively, so that the IP addresses of drive D21 and drive D18 are returned to MS4. After that, MS4 shares these IP addresses with its drive D3, which initiates P2P data transfer operations to copy data to drive D21 in Region 2 and drive D18 in Region 5 for backups.
There are three identical copies of data stored in drives in three regions after backup. We know those three drives are full or getting too full. To make more storage space, we need to split the data in them and transfer part of the data to other drives. Here, we adopt the approach in [
16]. Since each drive covers key-value pairs in a certain
key range as shown in
Table 1, it can split its data into two parts with smaller and greater
keys and transfer one part to another empty drive in the same region. Then, the metadata server updates the indexing table.
For example, now drive D3 in Region 4 is full or getting too full, so that it needs to be split. As shown in
Table 1, this drive stores key-value pairs whose
key range is from “
100 0000011 0…” to “
100 0000011 1…” currently. The metadata server can find an empty drive (e.g., drive D167) as the destination for splitting. Then, the second half of the data with greater
keys in drive D3 is transferred to drive D167. The metadata server MS4 also splits the indexing mapping for drive D3 and updates that as follows.
From
Figure 7, we can see that the data in drive D3 of Region 4 have been backed up to drive D21 of Region 2 and drive D18 of Region 5. Hence, those two drives (D21 of Region 2 and D18 of Region 5) need to be split as well following the same way as D3 of Region 4. The indexing tables in metadata servers MS2 and MS5 are also updated.
From the technical perspective, it is feasible to separate key-value pairs into two parts with smaller and greater keys for data splitting, because Kinetic Drives support the APIs “GetPrevious(key)” and “GetNext(key)”. Practically, the metadata server can record the smallest and greatest keys of data in a drive. Hence, using these APIs, the Kinetic Drive can easily separate data.
5.6. Future Data Access
There are three drive copies in the system, after a drive has been backed up to two other regions. When a user tries to access a key-value pair, it is best for the user to get these data from the region closest to his/her location. In order to support that, each metadata server for all regions maintains a table, recording the mapping between
key ranges and the IP addresses of all three drive copies, as shown in
Table 2, which is an advanced version based on
Table 1.
In
Table 2,
M is the number of drives for storing the
original data (primary copies). Each
key range is covered by three drives, including
original drive in this metadata server’s region and two additional backup drives in two other regions. The IP addresses of these three drives are stored in three columns respectively. For the example in
Figure 7, the
key range of drive D3 in Region 4 and the IP addresses of drives D3 (Region 4), D18 (Region 5), and D21 (Region 2) are stored (drive D3 is the
original drive in Region 4) in metadata server MS4’s table. In addition to these
M rows,
Table 2 also stores the mapping between
key ranges and IP addresses of those drives as additional backup copies for other regions. For example, in metadata server MS2’s table, the
key range of drive D21 in Region 2 and the IP addresses of drives D3, D18, and D21 are also stored, because drive D21 is one backup copy of drive D3 in Region 4.
When a user reads/retrieves a key-value pair, he/she first sends the
key to the metadata server in its region. After the metadata server receives the
key, it checks the first
bits to see in which region this key-value pair is supposedly stored, based on our indexing scheme described in
Section 5.2.
If the
key falls into the same region as the user and is covered by the
key ranges of
original drives in this region, then the metadata server directly looks up its mapping table, finds out which drive covers the
key, and returns the drive’s IP address to the user. Finally, the user directly contacts this drive for data retrieval. For example, in
Figure 7, if a user in Region 4 reads a key-value pair whose
key is covered by the
key range of the Drive 3 in Region 4, this scenario is applied.
If the
key is not covered by the
original drives’ key ranges of the metadata server, but it is covered by the
key range of an additional drive as the backup copy of another region, a similar process happens. For example, in
Figure 7, a user in Region 2 initiates a read request for data whose
key is covered by drive D21’s
key range of Region 2. This
key is not covered by the
original drives in Region 2, because drive D21 is the additional backup copy of drive D3 in Region 4. The metadata server MS2 still returns the IP address of drive D21 of Region 2 to the user, since drive D21 is the closest one to the user (i.e., in the same region).
If the
key is neither covered by the
original drives’ key ranges of the metadata server, nor the
key ranges of the additional drives as backup copies of other regions, the metadata server then involves another metadata server in a different region for data retrieval. For example, in
Figure 7, a user in Region 2 retrieves data whose
key is covered by drive D155 in Region 5. However, in Region 2, both
original drives and additional drives as backup copies of other regions do not cover this
key. In that case, the metadata server MS2 checks the
key and finds that it is covered by
original drives in Region 5. Hence, it returns the IP address of metadata server MS5 to the user. After the user contacts the metadata server MS5, then MS5 looks up its table as shown in
Table 2 and finds that the
key range of drive D155 covers this
key. Instead of immediately returning drive D155’s IP address to the user, MS5 compares the distances from the user to three drive copies’ locations respectively, figures out which drive copy is the closest one to the user (it could be drive D155’s additional backup drive in other regions such as Region 1), and returns its IP address to the user.
We can see that by taking advantage of three drive copies, the user receives the IP address of the drive closest to its location.
When a user writes/updates a key-value pair into a drive, a similar process is applied. The difference is that, instead of receiving only the IP address of the closest drive, the user gets the IP addresses of three drive copies covering these data’s
key, from the metadata server. Then, it contacts these three drives and writes/updates data into them, so that all three drives get updated. For example, in
Figure 7, if a user writes/updates a key-value pair into drive D3 in Region 4, the metadata server returns the IP addresses of drive D3 (Region 4), drive D21 (Region 2), and drive D18 (Region 5) to the user. Then, the user updates data in drive D21 (Region 2) and drive D18 (Region 5).
5.7. Data Recovery
All data are stored in three drives from three different regions. If one of these three drives fails, the system can replace the bad drive and recover the data from two other drives. The metadata server just finds the closer drive, initiates a P2P data transfer to recover data, updates its mapping table, and notifies two other metadata servers in different regions.
For example, in
Figure 7, if drive D3 in Region 4 fails, the metadata server MS4 figures out that either drive D21 in Region 2 or drive D18 in Region 5 is the closer one to drive D3. Then, MS4 finds an empty drive (e.g., D137) in its region and initiates a P2P data transfer operation from drive D21 or D18 to drive D137. Finally, MS4 replaces drive D3’s IP address with D137’s in its mapping table and notifies metadata servers MS2 and MS5 to update their mapping tables to reflect the change as well.
Following a similar idea of local backup discussed in
Section 5.4, practically, for each region, data can be quickly recovered from drives within the same region, if some drives are reserved as local backups for the
original data. However, in this paper, we just show that our design is also feasible for data recovery between different regions, especially if inter-region data recovery is necessary.
5.8. Adding Drives
As time goes on with newly generated data, it is possible that more drives need to be added. When a set of new Kinetic Drives is added in a region, some of them can be used to store the
original data of this region, while the rest of them become other regions’ backup drives. In both cases, when new drives are available, the metadata server can simply update
Table 2 for new key-value pairs by filling in the IP addresses of new drives. Hence, our approach discussed in this section can work well in this scenario.
5.9. Discussion
Part of our design can be applied to other key-value store systems without using Kinetic Drives. For example, maintaining multiple copies per data is a usual way to handle fault tolerance and reliability. Furthermore, location-aware design is a common scheme to speed up data access.
However, most of our design is tailored to Kinetic Drives. As mentioned previously, Kinetic Drives are specifically designed for storing key-value pairs and providing data access. Given a key, Kinetic Drives can run and perform searches for data by themselves. With this unique feature, data management becomes easier, so that traditional storage servers can be eliminated. Only simple metadata servers are needed for managing those Kinetic Drives. Hence, the indexing table design mapping keys to drives is unique for Kinetic Drives. Furthermore, many other issues such as data access, data backup and splitting, and data recovery become more efficient by taking advantage of the P2P data transfer offered by Kinetic Drives. With P2P data transfer, data can be directly sent and received by Kinetic Drives without going through the storage servers.
6. Numerical Result: Storage Overhead
In this section, we show that the storage overhead for metadata servers to manage those Kinetic Drives is affordable.
For example, we assume there are 32 regions worldwide. In each region, there are 2048 Kinetic Drives including drives for original data and additional backup copies for other regions. In that case, the first five bits in a key are used to decide the region, and the additional 11 bits are used to locate drives within a region.
We have 32 metadata servers in total. For each metadata server, there are 2048 rows and four columns (
key range plus three IPs) in its mapping table, as shown in
Table 2, assuming all drives are used. The
key range takes 5 bits + 11 bits = 16 bits = 2 bytes to store. Furthermore, to support the drive splitting mentioned in
Section 5.5, the metadata server maintains the smallest and largest
keys for each drive. Each
key is up to 4 KB, so that each entry in the first column for each row takes 4 KB ∗ 2 + 2 B ≈ 8 KB. Assuming IPv6 is used for the drives, each of the second to fourth columns takes 128 bits = 16 B. Hence, each row in the mapping table takes fewer than 9 KB (if a shorter
key is used, it can be further reduced). The total storage overhead for each metadata server is less than 9 KB ∗ 2048 = 18,432 KB = 18 MB, which is affordable (To be precise, we also need to include the access frequencies of drives accessed by all regions mentioned in
Section 5.4. However, the storage overhead of these numbers is relatively very small compared to the current result, so that it can be negligible and does not affect our conclusion.), We can see that the dominating storage overhead for each row in the mapping table is the cost to store the smallest and greatest
keys for drive splitting, and others can be negligible.
Based on the above calculation, we can find that the storage overhead for each metadata server is approximately up to 9
M KB (9 KB ∗ M), where
M is the number of Kinetic Drives for the region.
Table 3 summarizes the total storage capacity of a region and the storage overhead of its metadata server for different numbers of drives. For example, only 72 MB of storage overhead are needed for a cluster of 8192 Kinetic Drives to provide a 32,768 TB storage capacity.
We conclude that the storage overhead for each metadata server is very affordable and roughly linearly proportional to the number of drives in its region. Hence, a good scalability is achieved.
7. Performance Evaluation
While this paper focuses on the high-level design for the entire global key-value store system based on Kinetic Drives, in this section, we conduct simulations to show the performance of the data backup approach and rules discussed in
Section 5.4.
7.1. Simulation Setup
We simulated a global key-value store system with 16 and 32 regions respectively. In each region, there is a cluster of Kinetic Drives accessed by users. The locations of those clusters and users are randomly generated and distributed in a normalized 1000 ∗ 1000 map.
For each Kinetic Drive in each region, we assume it is accessed by all the users following a Poisson distribution with a mean of 500 times.
Network latency is an important performance metric of a large-scale networked system. Propagation delay is a typical component of the network latency. It is the amount of time taken by the first bit to travel from the sender to the receiver over the physical medium of the network link. Propagation delay depends on the distance between sender and receiver and the propagation speed, as shown in the following equation.
We can see that it is proportional to the distance between the source and destination in the network, and a shorter distance can reduce the propagation delay. Since clusters of Kinetic Drives and users are dispersed among different locations, the propagation delay directly reflects the distance between a user and the target Kinetic Drive, to show the cost of a data access. Moreover, with a shorter distance, the number of intermediate networking devices (e.g., routers) along the path may be decreased as well, possibly reducing processing and queuing delays, so that the entire network latency can be further shortened.
This paper discusses the high-level architecture design of a global key-value store system, especially focusing on the backup rules and coordination among metadata servers, Kinetic Drives, and users. Hence, in order to evaluate this design, we use the average propagation delay per data access request for all drives in all regions by all the users as the metric. As mentioned above, this propagation delay reflects the distance between users and the target Kinetic Drives, which also has influence on the entire network latency.
We compare our result with the random approach, which just randomly chooses two regions to find two available Kinetic Drives for the original data’s backups, without considering the access frequencies and distances. To fairly show the advantage of our approach, however, in the random approach, when a user tries to access a Kinetic Drive, we still use the same way as our approach to choose a Kinetic Drive in the region with the shortest distance to the user as the target drive to calculate the result. In other words, for the random approach, the randomness is only applied for the selection of backup drives.
7.2. Results
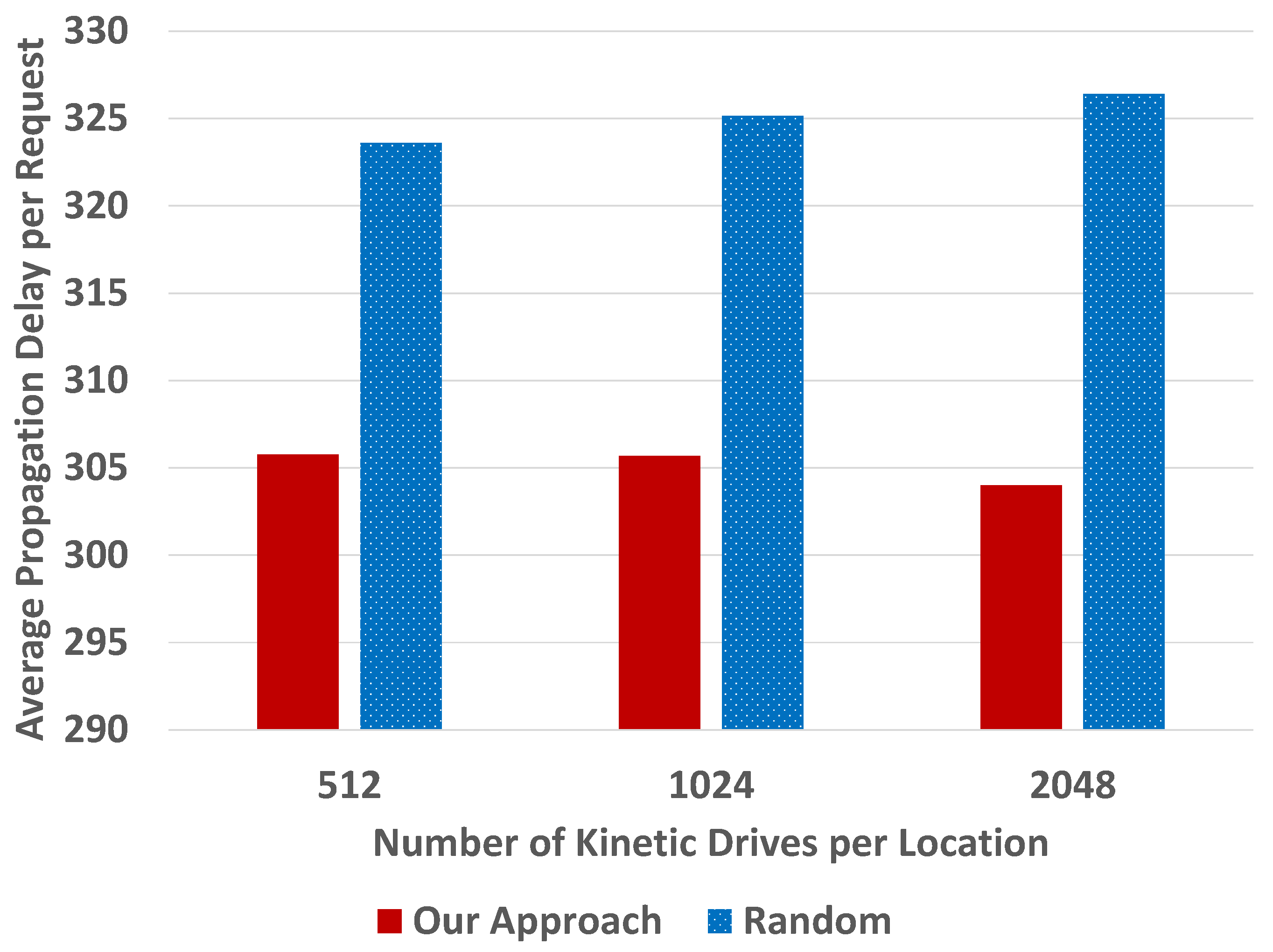
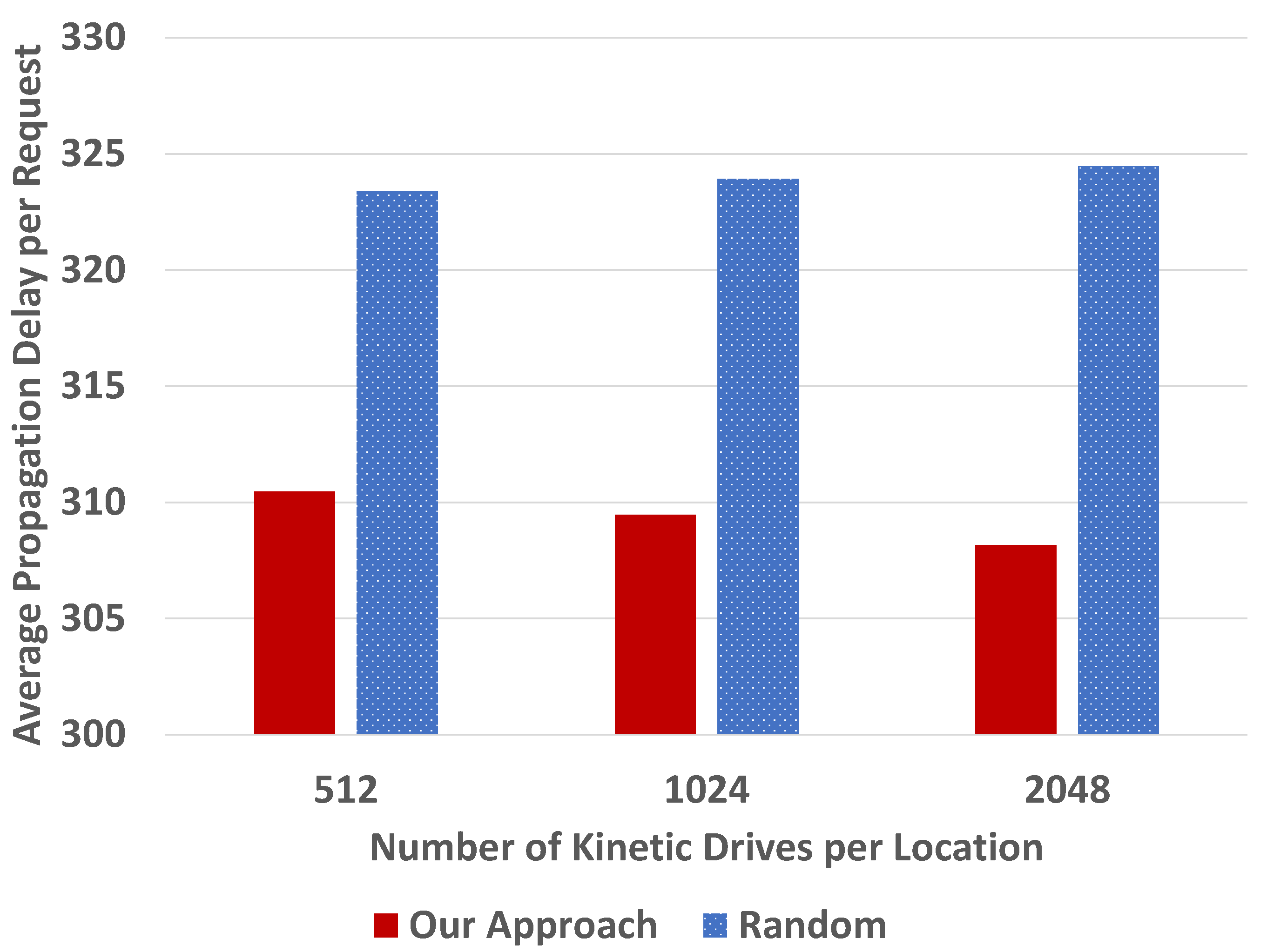
We first conducted simulations with 1000 users. We varied the number of Kinetic Drives per location, 512, 1024 and 2048, as shown in
Figure 8 and
Figure 9.
From
Figure 8 and
Figure 9, we can see that our backup approach outperforms the random one, in terms of the normalized average propagation delay for data access requests. In other words, the average propagation delay in our approach is shorter than the random selection. This is because we consider the data access frequencies when the system selects the first backup drive, so that many frequently accessed data can be accessed near the users. Furthermore, our backup approach considers the distances so that some users can access data from regions that are closer.
Comparing the results between
Figure 8 and
Figure 9, we can find that the average propagation delays per request are generally stable in the random approach when the number of regions is increased from 16 to 32. The results for 16 regions are smaller than those for 32 regions in our approach. This is because with more regions, the randomness of cluster and user distribution plays a more important role, so that the performance improvement in our approach becomes less obvious.
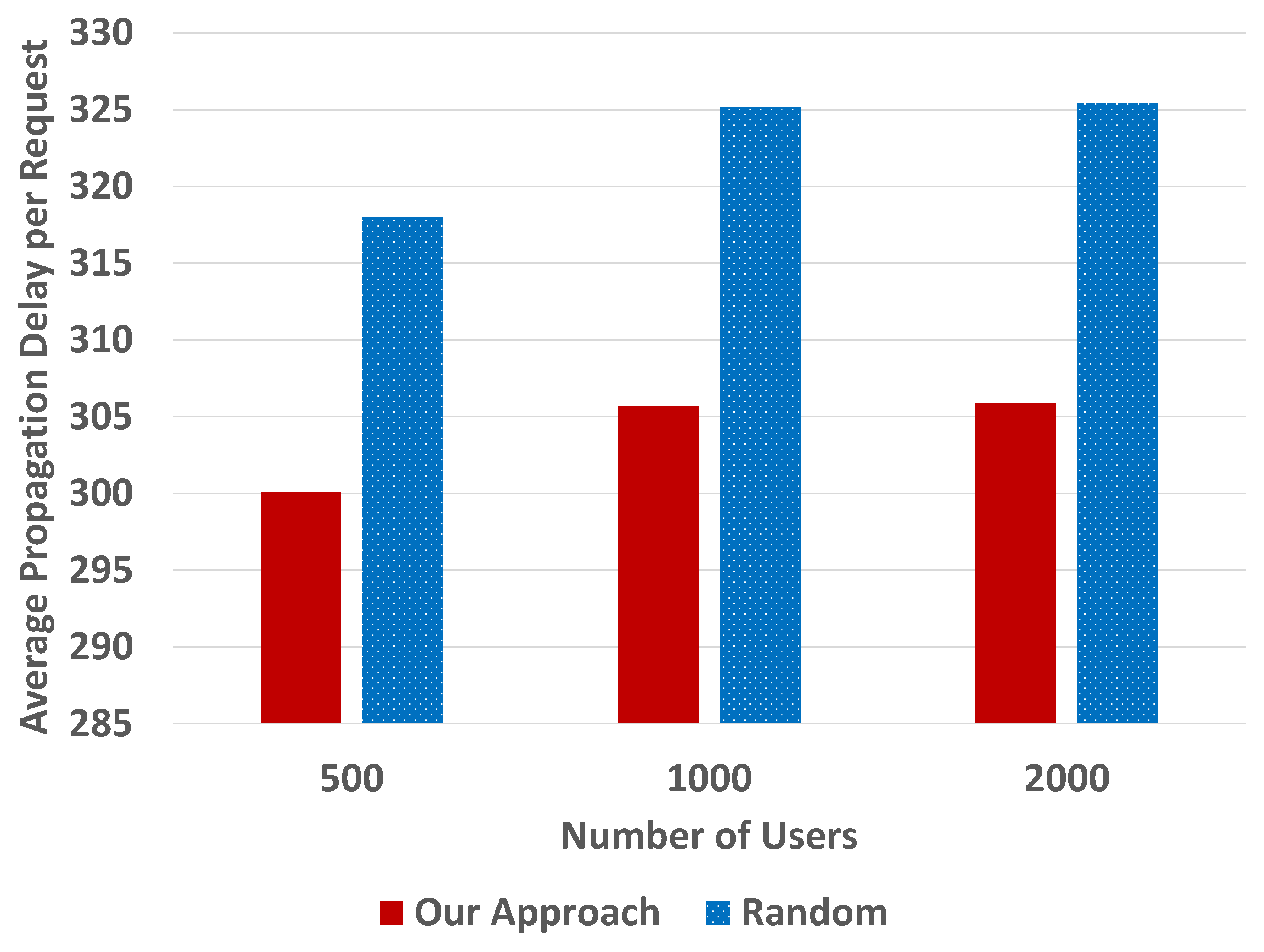
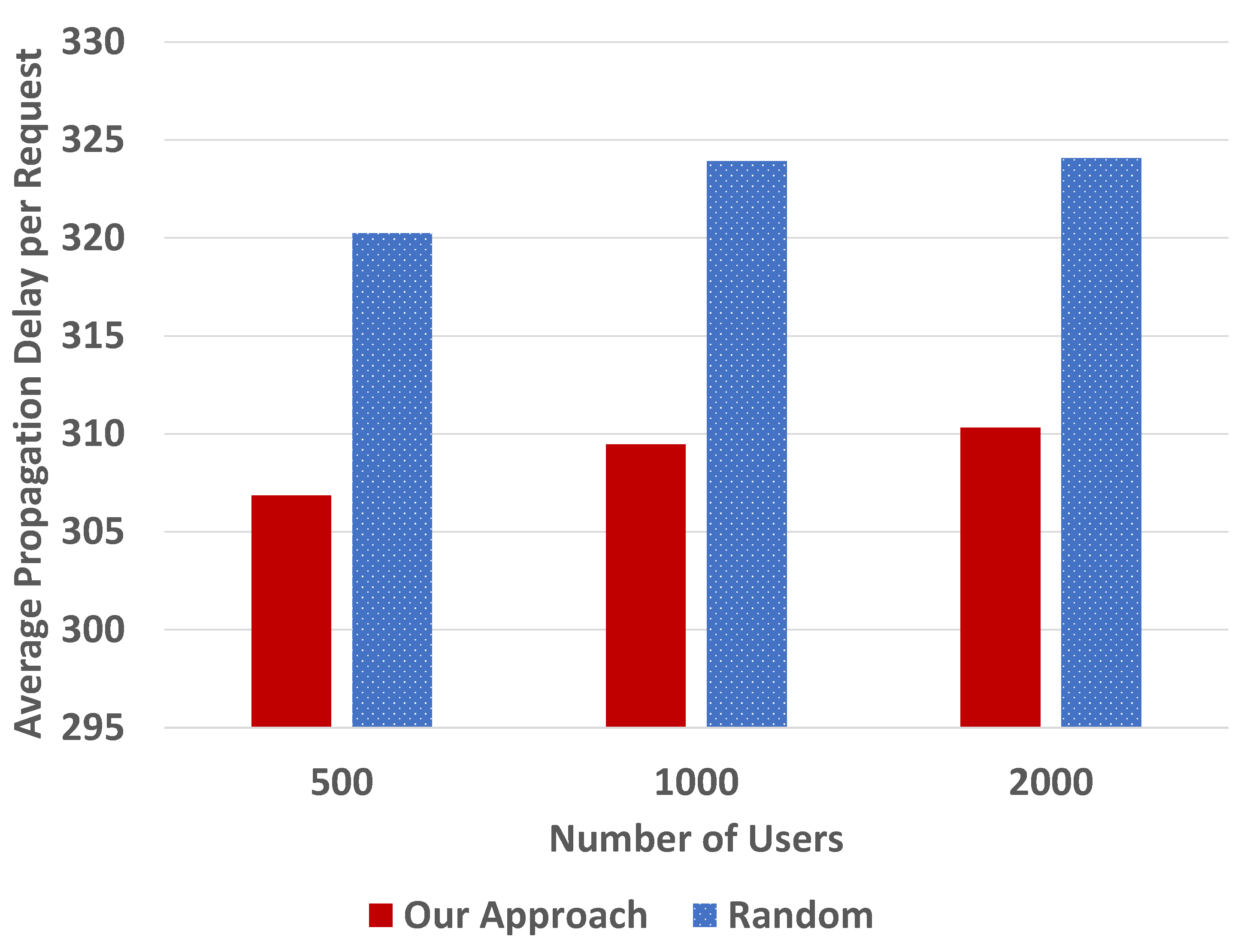
Next, we conducted simulations with 1024 Kinetic Drives per location, varying the number of users, 500, 1000, and 2000, as shown in
Figure 10 and
Figure 11.
From
Figure 10 and
Figure 11, we can see that the results are consistent with
Figure 8 and
Figure 9. The normalized average propagation delay for data access requests in our backup approach is shorter than the random one.
Similar to the results between
Figure 8 and
Figure 9, we can find that the average propagation delays in
Figure 10 and
Figure 11 are generally stable in the random approach. The performance improvement in our approach is smaller when the number of regions is increased from 16 to 32, for the same reason mentioned previously.
To sum up, with the consideration of data access frequencies and distances, the average propagation delay for data access requests can be reduced. Based on the discussion mentioned previously, for the practical deployment, processing/queuing delays are potentially decreased as well because of the shorter distance.
8. Conclusions
In many Big Data applications, as the one of NoSQL databases, key-value store systems provide simple and flexible solutions. Kinetic Drives were recently developed by Seagate especially for efficient key-value pair operations. Users can directly access Kinetic Drives via their IP addressees so that data storage and management complexity can be reduced.
In this paper, we propose a novel global key-value store system based on Kinetic Drives. We investigate data management issues for a large number of Kinetic Drives in different regions. Our proposed approach for data access, key indexing, data backup, and recovery is scalable with a small storage overhead. The performance evaluation shows that our location-aware design with the data backup approach reduces the average propagation delay for data access requests.
As future work, we plan to consider different key distributions and investigate their impacts on the performance. We will explore various approaches to handle different types of workloads, especially imbalanced scenarios, and propose solutions accordingly.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}