1. Introduction
Interception of ballistic missiles has been a research topic for years. Calculation of interception trajectories is usually performed off-line by using two-point boundary-value problem formulation. The paper [
1] employs the proposed guidance law in real-world conditions, where interception trajectories are sought in
, comprising of: three NED (north-east-down) coordinates, speed, path angle and heading of the interceptor. This usually calls for the use of optimization techniques to obtain the reference trajectories to follow. In [
2], there are four different guidance laws considered, showing that the interception of the missile is possible if one has perfect measurements and accurate estimation of the target maneuvers. To obtain the optimal interception point, one can use multiple approaches, ranging from classical variational calculus as in this paper, or others, such as metaheuristics, e.g., a genetic algorithm, see [
3], which is used there to establish the optimal interception point, minimizing certain functional. The functional may refer to flight time of the intercepting missile, or distance between the interceptor and the ballistic missile. Guidance of an intercepting rocket is a problem which has multiple solutions. One can distinguish passive and active guidance approaches [
4]. Several types of active guidance methods can be distinguished:
line of sight guidance (also called a two-point guidance), where the intercepting rocket always points to the target,
deviated pursuit, where the intercepting missile points ahead of the target,
proportional navigation, where the line of sight angle of the target is estimated,
optimal guidance by minimizing a certain functional.
Among the last, one can consider many approaches, such as LQR [
5] embedded into variational calculus framework, LQI (LQ integrated) control law [
6], applied to linearized systems, predictive control and nonlinear predictive control, which fall into the optimization strand [
7], or performance-based approaches to PID tuning, [
8]. This paper adopts the optimization technique to generate the optimal open-loop control signal to reach the desired point minimizing a certain performance index. A more comprehensive view on a general framework of a ballistic missile defense systems, comprising of a launcher and a radar, please refer to [
9]. Another study of tracking a ballistic missile can also be found in [
10].
Optimization techniques have been developed for ages—it was in 17th century when such mathematicians as Leibnitz, Bernoulli, Newton of d’Hospital pushed their horizons further. They are required in production processes, business/management, or in military applications, since everybody is interested in gathering as much as possible, at the least expense, in the shortest time, etc. The aim of this paper is to use this approach in the optimal interception problem of a ballistic rocket with a known trajectory, using the intercepting missile.
As has been already remarked, an optimization approach is attractive in many areas, and can include, e.g., quadratic cost function in an unbounded problem, leading to an easy solution. In real world applications, however, constraints are ubiquitous, and need to be taken into consideration during the optimization process. In this work, optimization is based on variational calculus that could be, e.g., presented as the problem of finding, among all the continuous functions
, the one that satisfies terminal conditions [
11]:
achieving local extremum of the functional
The latter task has fixed terminal conditions, and the necessary condition of existence of such an extremum is satisfying the Euler–Lagrange (E–L) equation
From now on, whenever applicable without misunderstandings, the time indexes will be omitted. In the case of a variable initial point lying on the curve
, the function
is sought that crosses
and intersects
at time
. This function satisfies, in addition to E–L equation, the following transversality conditions:
If the functional depends on , then the necessary conditions are formed as a set of E–L equations. In the considered interception task, might depict the route traced by the nuclear train from what the missile is launched at , or the path of the rocket to be hit at .
Finally, when constraints are present and can be put in the form
, where
u denotes the control signal, and
is some function satisfying continuity conditions, the functional can be put in the form
The variational approach presented above will be adopted for finding optimal control signals of a missile to intercept a ballistic rocket, for which model and parameters will be presented in the next Section. The anti-ballistic missile is abbreviated in the paper as ABM, and is usually a surface-to-air missile designed to counter ballistic missiles [
12,
13].
As optimal interception tasks have already been solved and considered in the literature, presenting various scenarios and solutions, though as a set of pure results only, and form a continuously-developed research field, this paper presents the software in open text which can be used not only to simulate interception task, taking multiple system parameters into account during analysis, but also to perform parametric analysis on selected performance indices. All the issues will be addressed in the paper, which is the main motivation and contribution of this work.
2. Models of an Intercepting Missile and Ballistic Rocket
2.1. Simplified Intercepting Missile Model (1D)
Prior to giving a model of a rocket the question of model accuracy should be addressed. It would seem advantageous to find the most accurate model, but in such a case, computer calculations would take too much time, and mathematical description would disable any actions. The model should be simplified enough to mirror the dynamics of the missile, but not be oversimplified.
The missile is assumed to move on the basis of propulsion force, where gases leaving the rocket move it in the opposite direction [
14,
15,
16]. In order to enable mathematical description, the momentum conservation rule has been used, which states that the total momentum of the rocket (
) always adds to zero, where
with
m being the mass of the rocket, and
being its velocity. The effect of the drag force is harder to quantify, nevertheless, since in many important applications drag effects are very small, the drag force is omitted here. Potential drag effects, where the density of air changes with altitude, usually result in equations that are impossible to be integrated analytically (numerical integrations are needed), and leads to, in typical flight conditions of a 12,000
rocket flying at
, a drag force at the level of
of gravity force.
The considered control system should work in the following way: the control signal is the momentum of the gas, which when divided by m gives the velocity of the rocket. By integrating this velocity one can obtain information about the position of the rocket that should be compared with the information about the trajectory of the rocket that must be intercepted. The location is measured by a sensor, represented by pure feedback gain, and this signal should be subtracted from the reference signal w to obtain tracking error. The controller itself is not needed, since the open-loop control signal will be obtained as the result of optimization.
Assuming that
is the mass of he missile,
is the gain in the inner feedback loop of the rocket,
is the reference signal (optimized input signal to the control system), and
is its output, one can propose the following model with
(see
Figure 1):
The time constant of the rocket is assumed to be approximately several minutes, and its mass approximately
[
13,
17,
18].
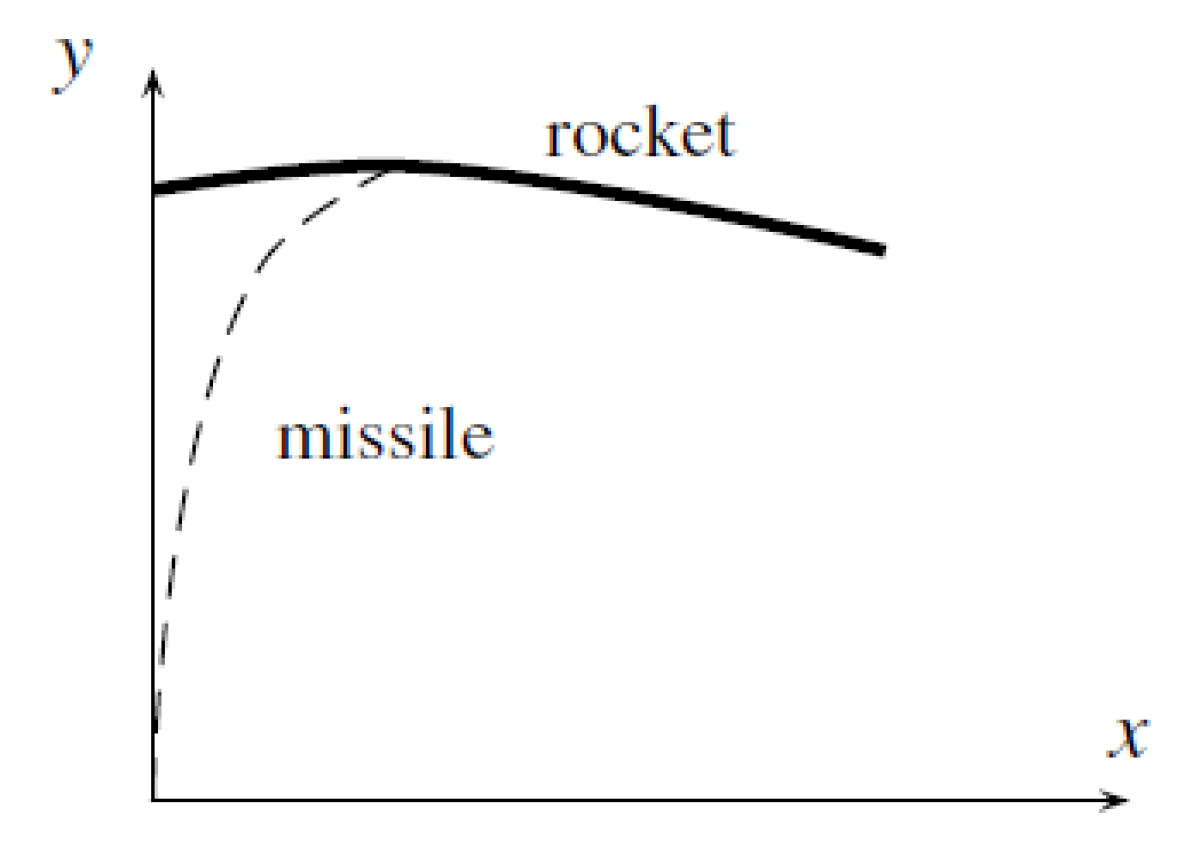
2.2. Simplified Rocket Model (1D)
Typical ballistic rocket is flying approximately horizontally the middle phase of its flight, plotting parabolic ∩-shaped function. The parabola should have a flat graph with some maximum attitude assumed, as in this paper, i.e.,
. Typical parameters of the intercepting missiles are given in the
Table 1 and
Table 2 [
12].
The trajectory of the rocket might be defined by the following canonical quadratic function
where
is the time in which the missile reaches its maximum altitude,
a is the slope, and
is the maximum altitude [
14,
16].
The missile used to intercept the ballistic rocket does not have any information about the time when the latter has been launched, thus
denotes the launch time of the intercepting missile. Assuming, as an example, that
with arbitrary chosen
, the default canonical ballistic rocket equation in 1D becomes
Such a 1D case can be interpreted as a situation when the interception takes place directly above the place of installation of intercepting rockets, below expected ballistic missile trajectory.
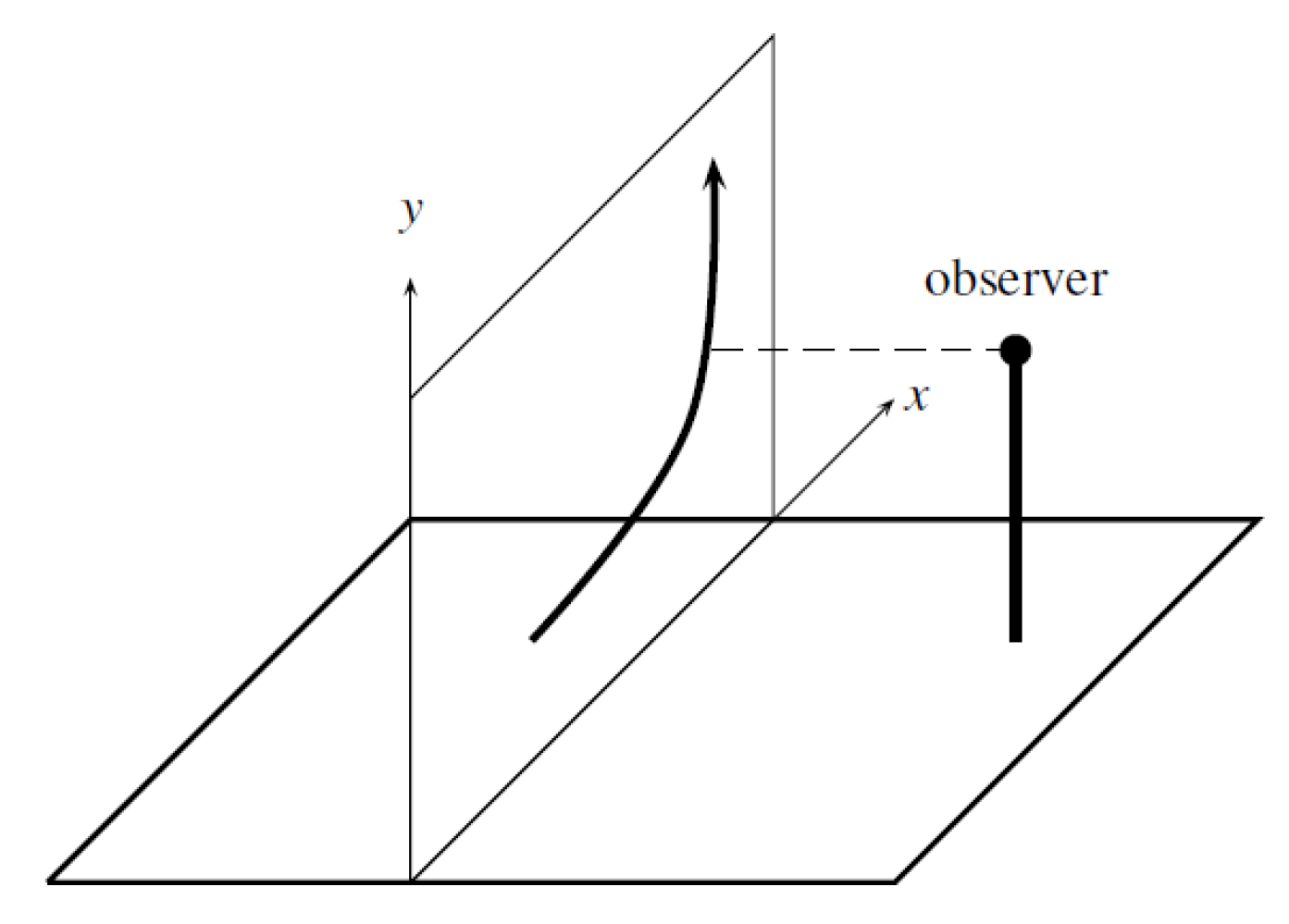
2.3. Intercepting Missile Model (2D)
The 2D task is the actual point of interest, where translation of the missile takes place in a two-dimensional space (distance
x vs. altitude
y). It is assumed that the observer is in parallel to the hyperplane on which the translation of the missile takes place, as well as the translation of the rocket, and their observation angle is the right angle, as depicted in
Figure 2.
By assuming a specified localization of the observer, there is no need to present the translation in 3D space, thus z axis information can be omitted.
Generalizing the previous 1D momentum equation to the 2D case [
15],
where velocity vector
is decomposed into
x- and
y-components.
With the base vectors and , the momentum .
2.4. Rocket Model (2D)
The ballistic rocket that should be intercepted is assumed to move as in the 1D case on a paraboloid, and its range is assumed to be
by default and maximum height in
y coordinate—
, i.e., it is a medium-range missile according to the American division or Russian classification [
12], see
Table 3 and
Table 4.
Among American ABMs currently used one can find: MIM-104 Patriot (PAC-1 and PAC-2), U.S. Navy Aegis combat system using RIM-161 Standard Missile 3, or Russian Federation’s missiles, as ABM-1 Galosh, ABM-3 Gazelle, ABM-4 Gorgon, and rockets of SAM system, like S-300P (SA-10) to S-400 (SA-21).
A rocket’s trajectory along the
y axis is described as in the 1D case, i.e., by the canonical form of a quadratic equation
with the same description, whereas along the
x axis as
where
g is the velocity of the missile along the
x axis. As in a 2D case, the to-be-presented plots depict the interception phase taking place in the middle phase of flight, where missile trajectory is relatively flat.
Just as in the case of a 1D task, in order to generate control action, no information concerning its launch time is available, thus denotes launch of our missile time again, all parameters of flight along the y axis remain the same as in the 1D case. The parameter g is set as default to .
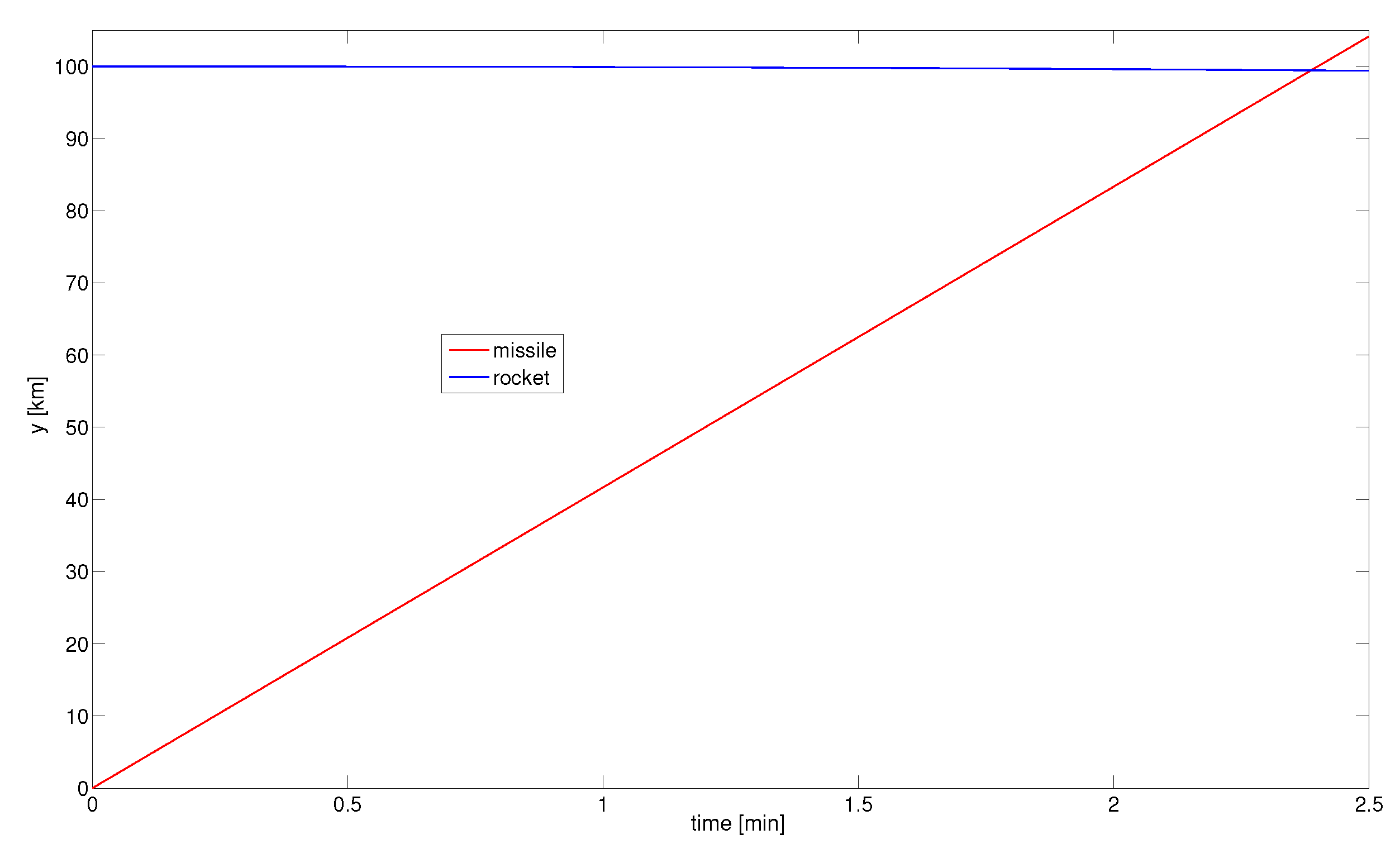
The interception process should take place when the ballistic rocket is in its descending phase of flight, whereas the missile continuously increases its altitude, as presented in
Figure 3.
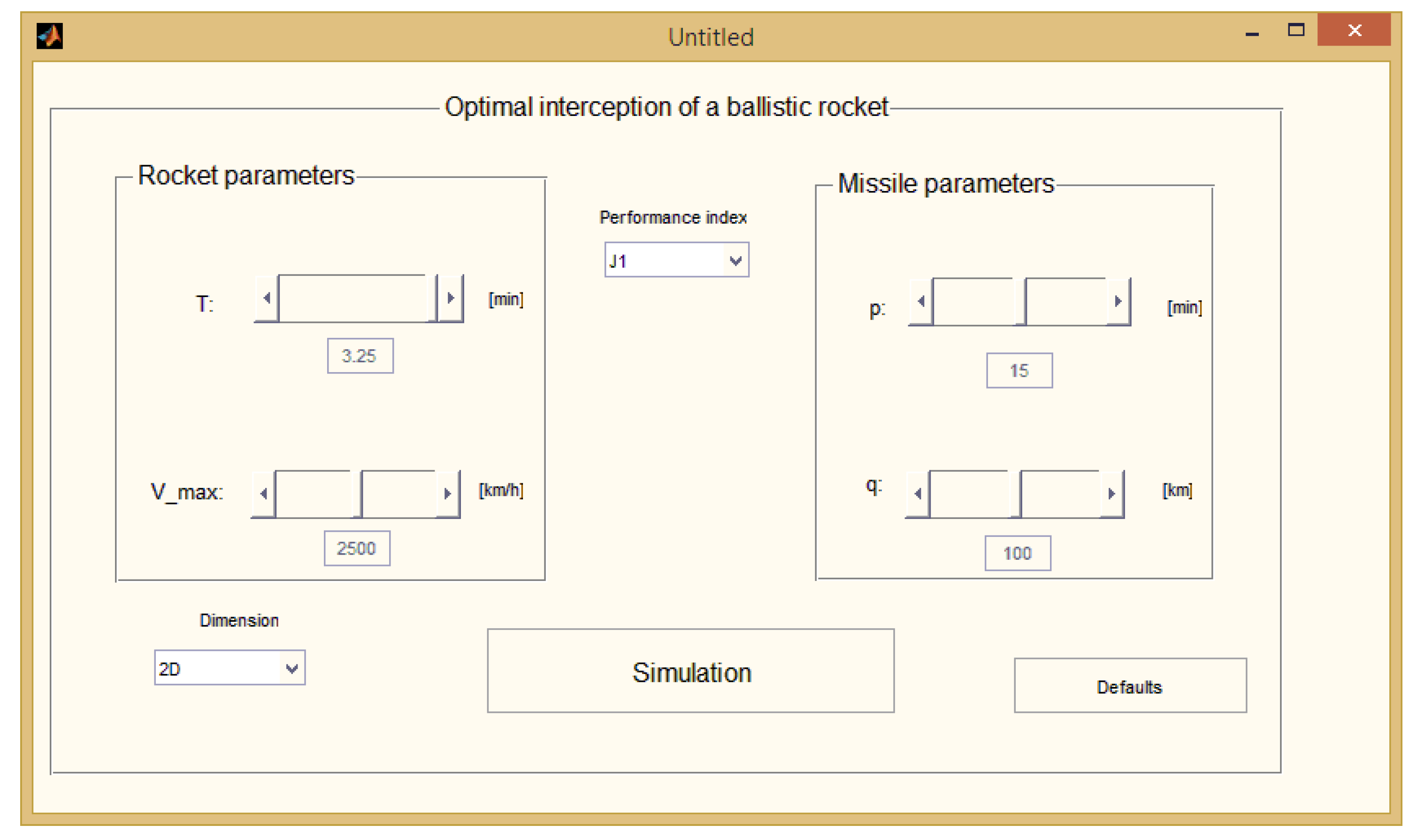
5. Software Program to Calculate Optimal Interception Time
The software program with the GUI in Matlab has been created that solves using Symbolic Toolbox the equations defining interception time instants , calculates integration constants, and visualises the results.
Its main window is presented in
Figure 10, where it is possible to define the task giving
p,
q,
T,
, choosing the appropriate performance index to minimize (
,
,
) and dimensionality of the problem (1D, 2D). After pressing
Simulation button, the calculations are executed, with the final plot drawn at the end, see
Figure 11.
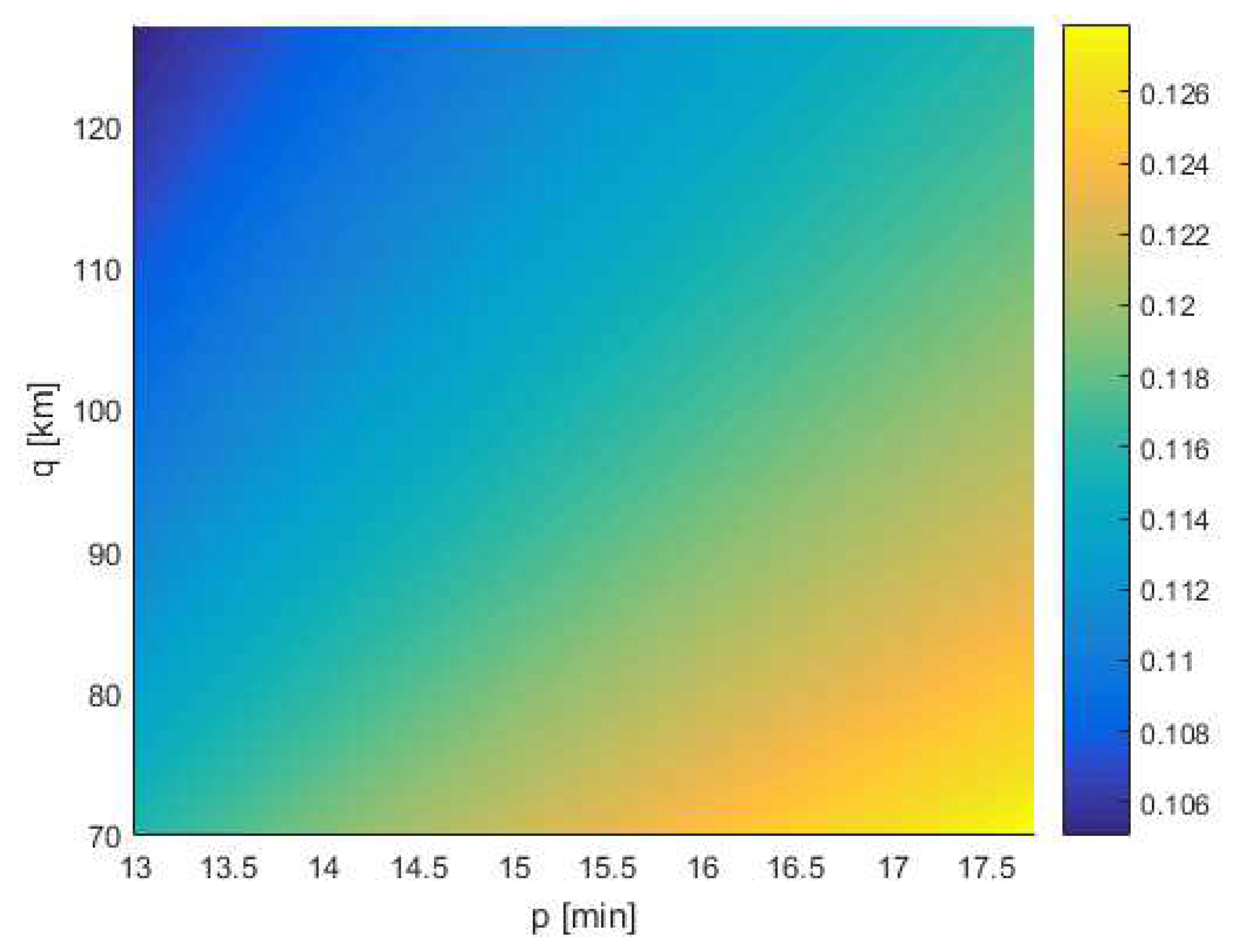
Optionally, it is also possible to perform parametric analysis. where in different windows one can choose simulations for three different values of parameters from the list: p, q, T, , for which appropriate plots of x, y, , are automatically drawn, with performance indices and interception time instants printed.
The software program will be made available in the open code, as m-files, in the MMD Database (see [
19]), to enable further development of the program by interested researchers, and on the web page of Applied Control Techniques research group (
http://act.put.poznan.pl). It can also be found at the link in the
Supplementary section.
In order to make use of the derived equations and optimal trajectories, one can perform a sample parametric analysis. For example,
Figure 12 presents results from 2D case with
,
, and
index. In all the cases,
,
,
,
.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}