Particle Probability Hypothesis Density Filter Based on Pairwise Markov Chains

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. PHD Filter Based on the PMC Model
2.1. PMC Model
2.2. PHD Filter Based on PMC Model
3. PF-PMC-PHD Filter
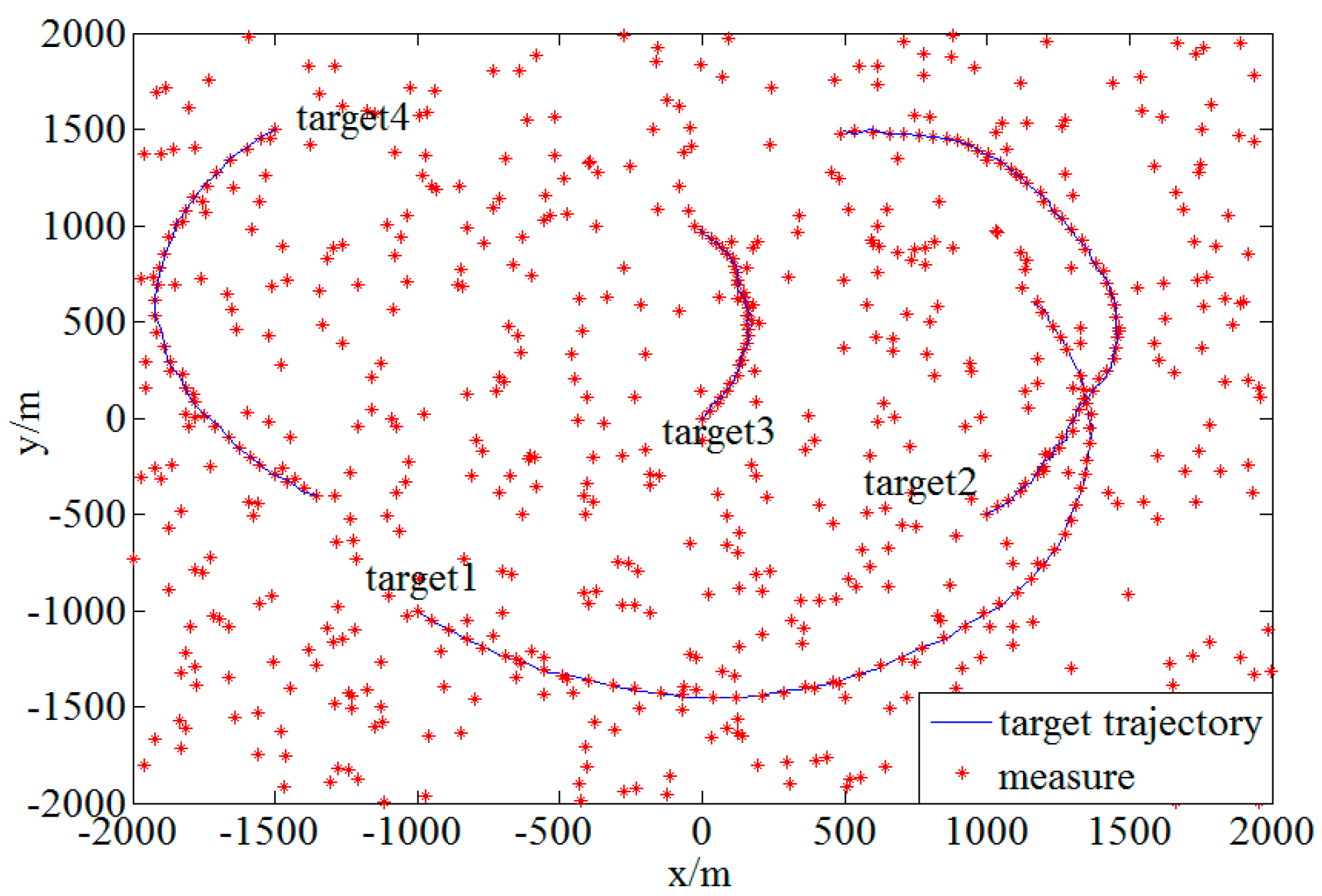
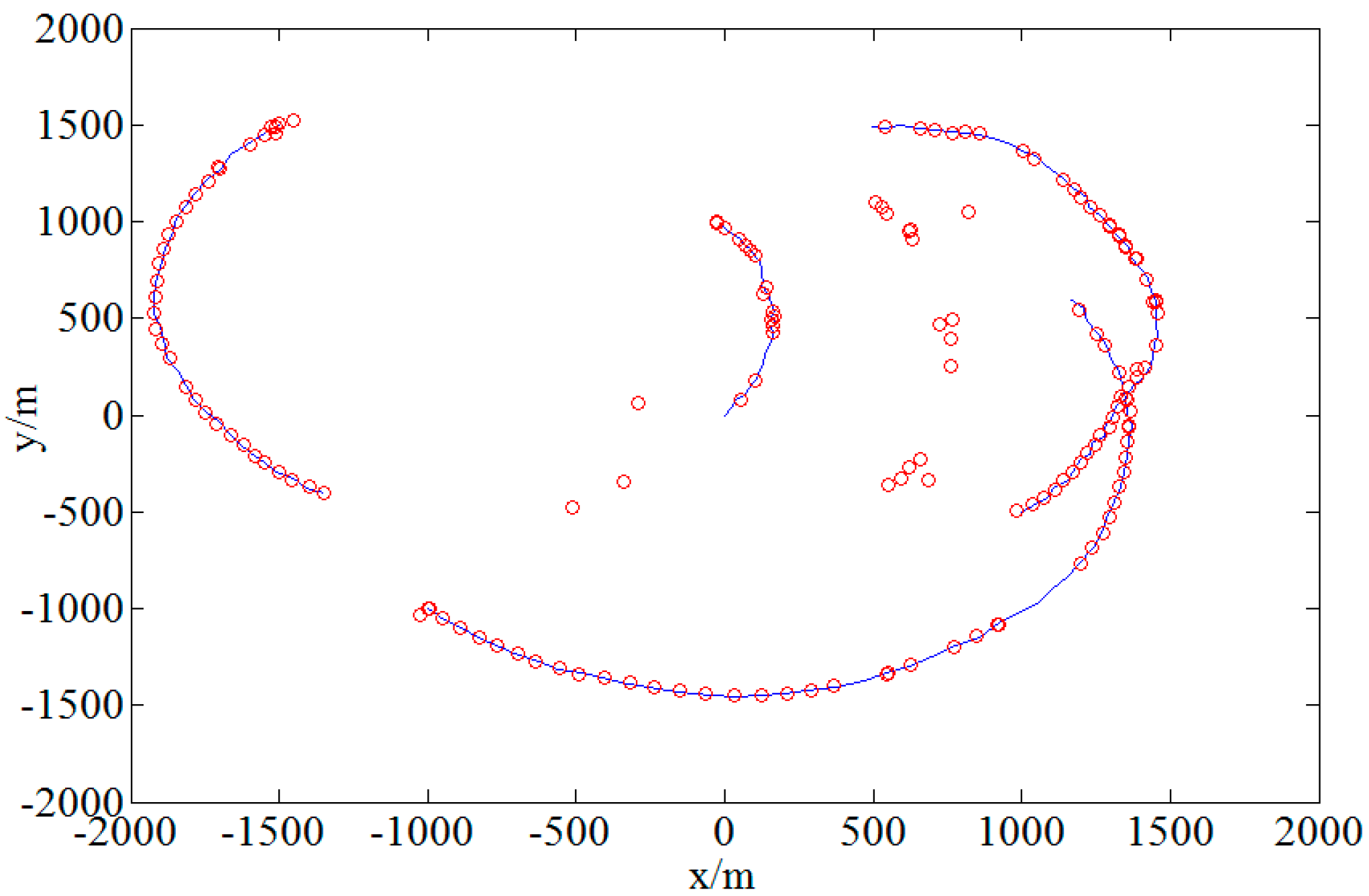
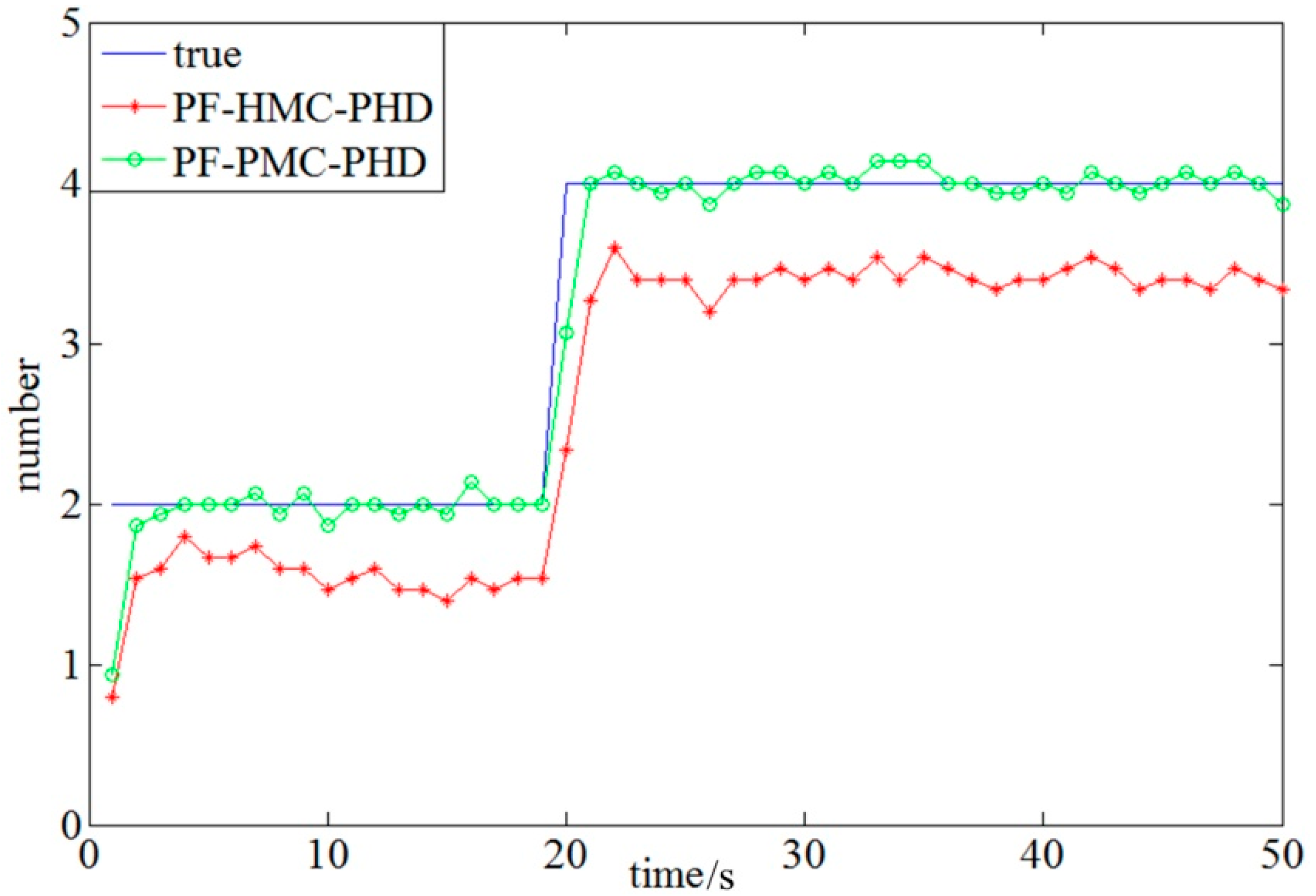
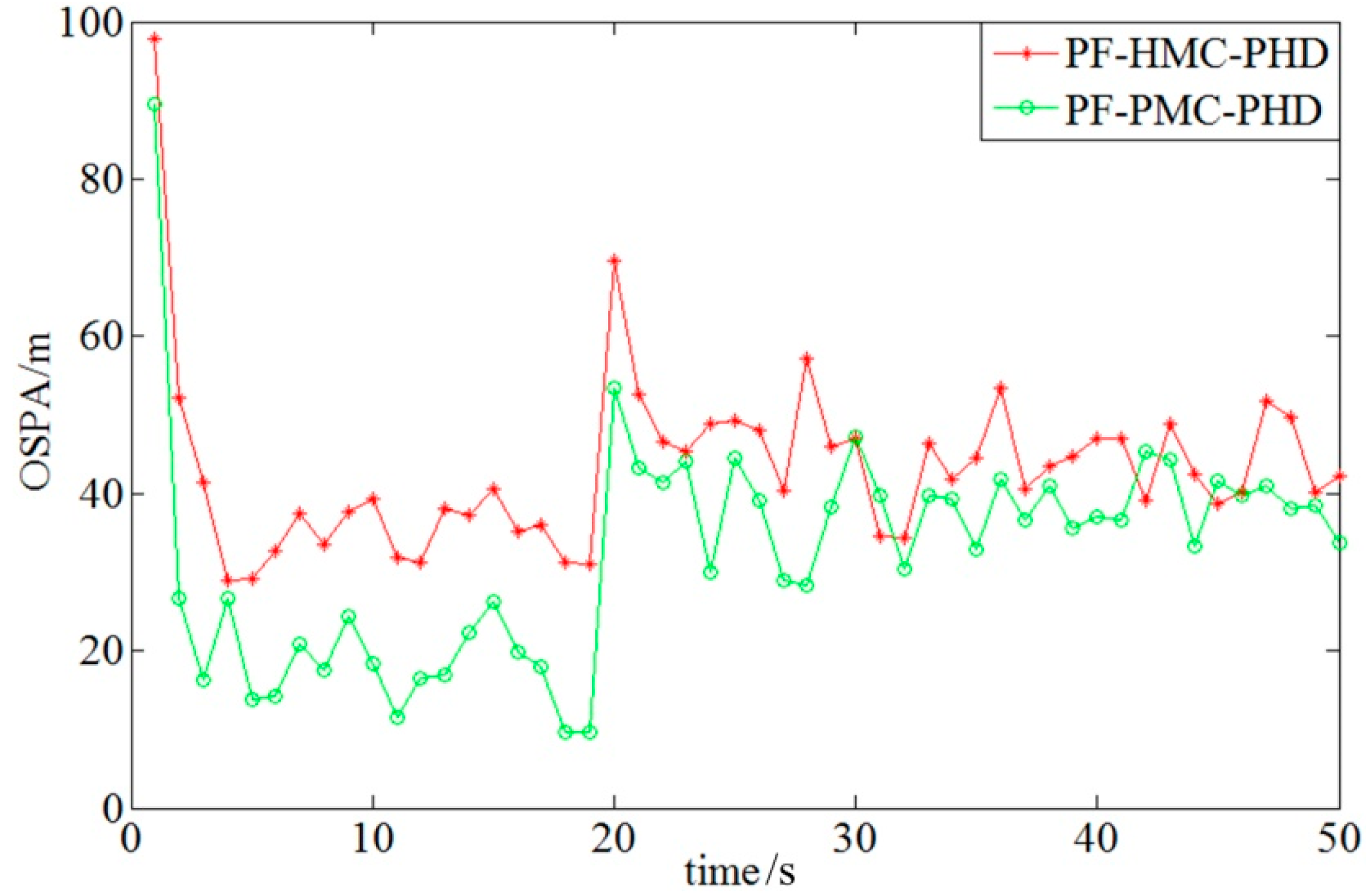
4. Experimental Simulation
4.1. A Particular Class of Gaussian PMC Model
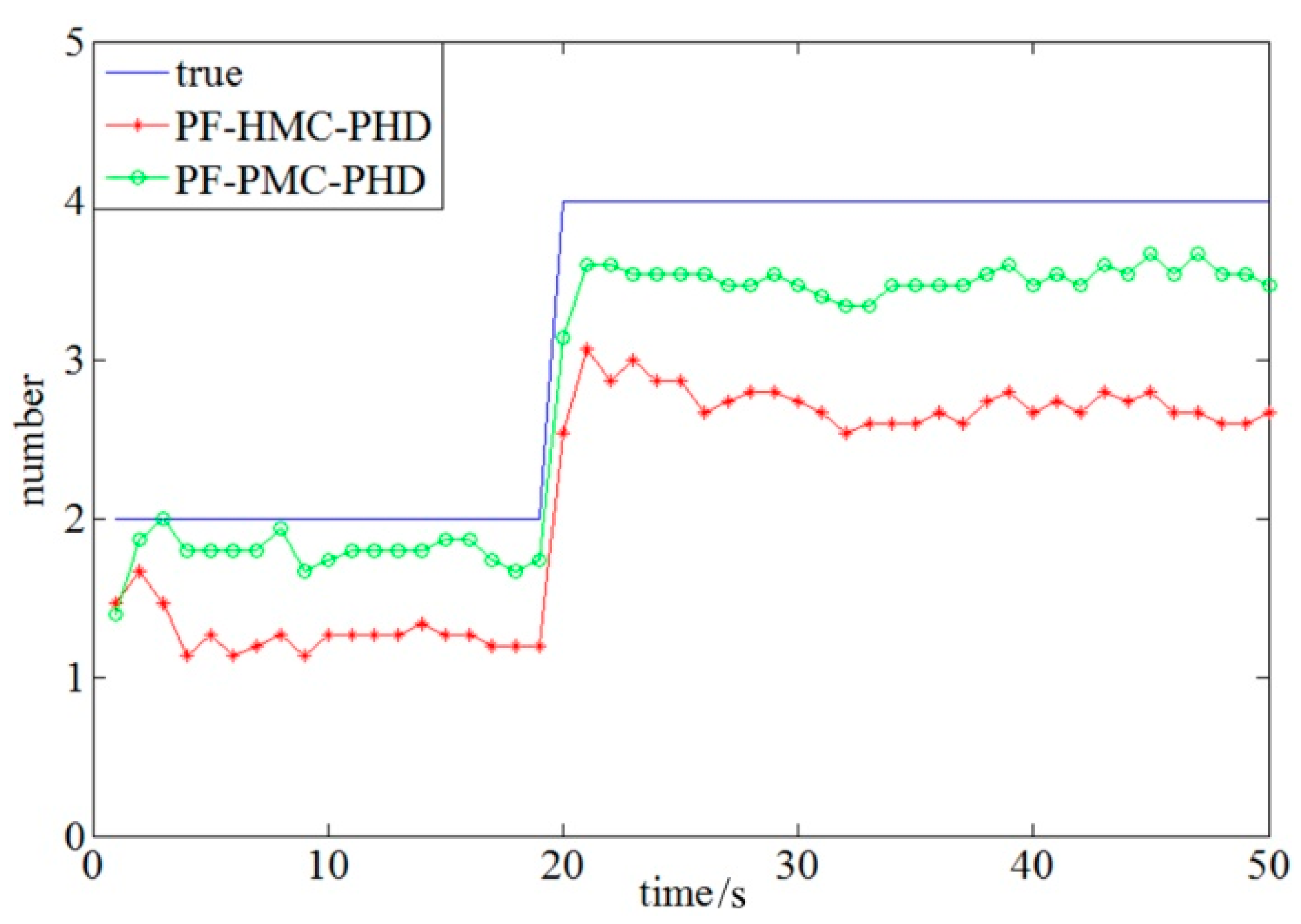
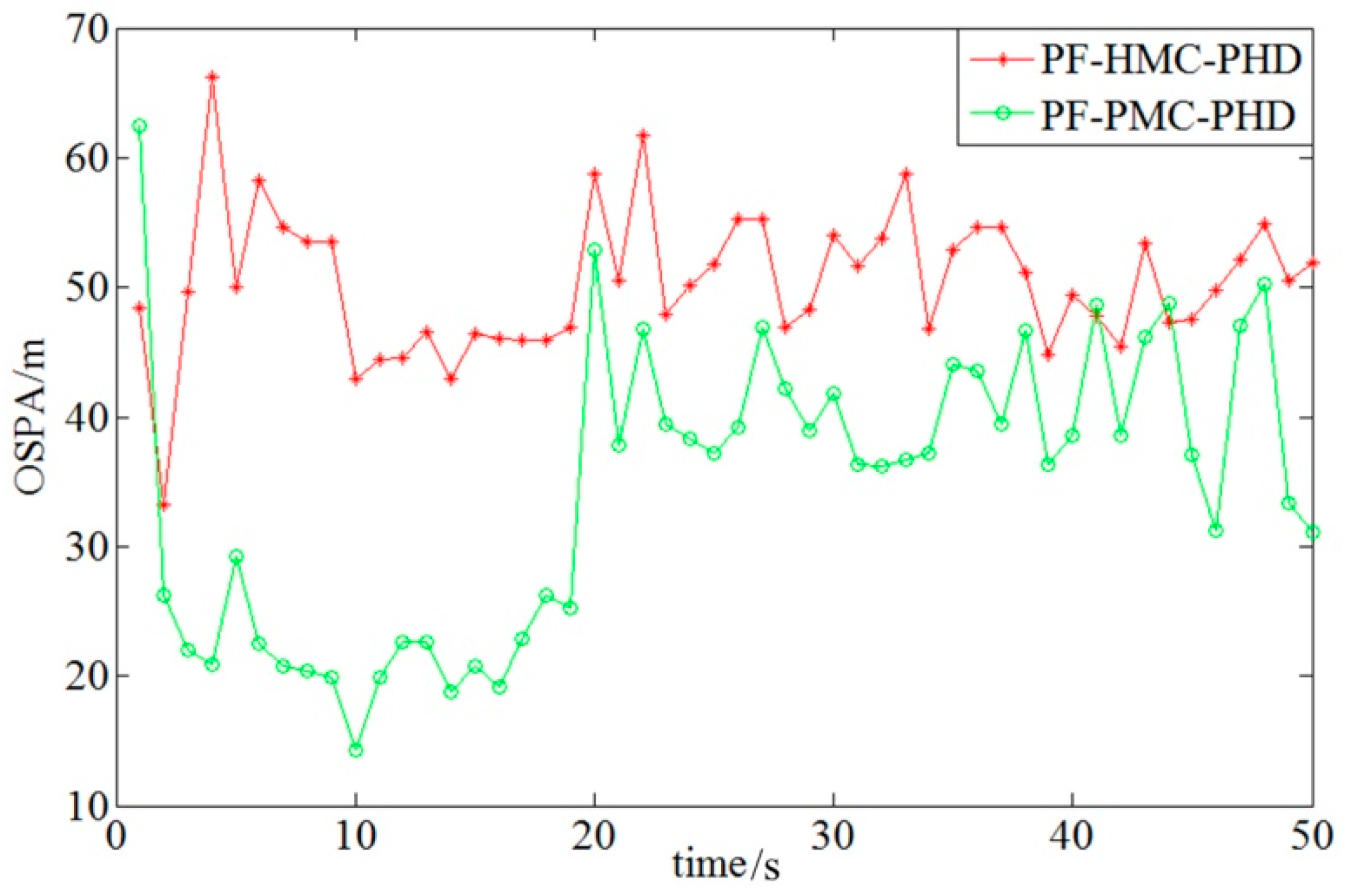
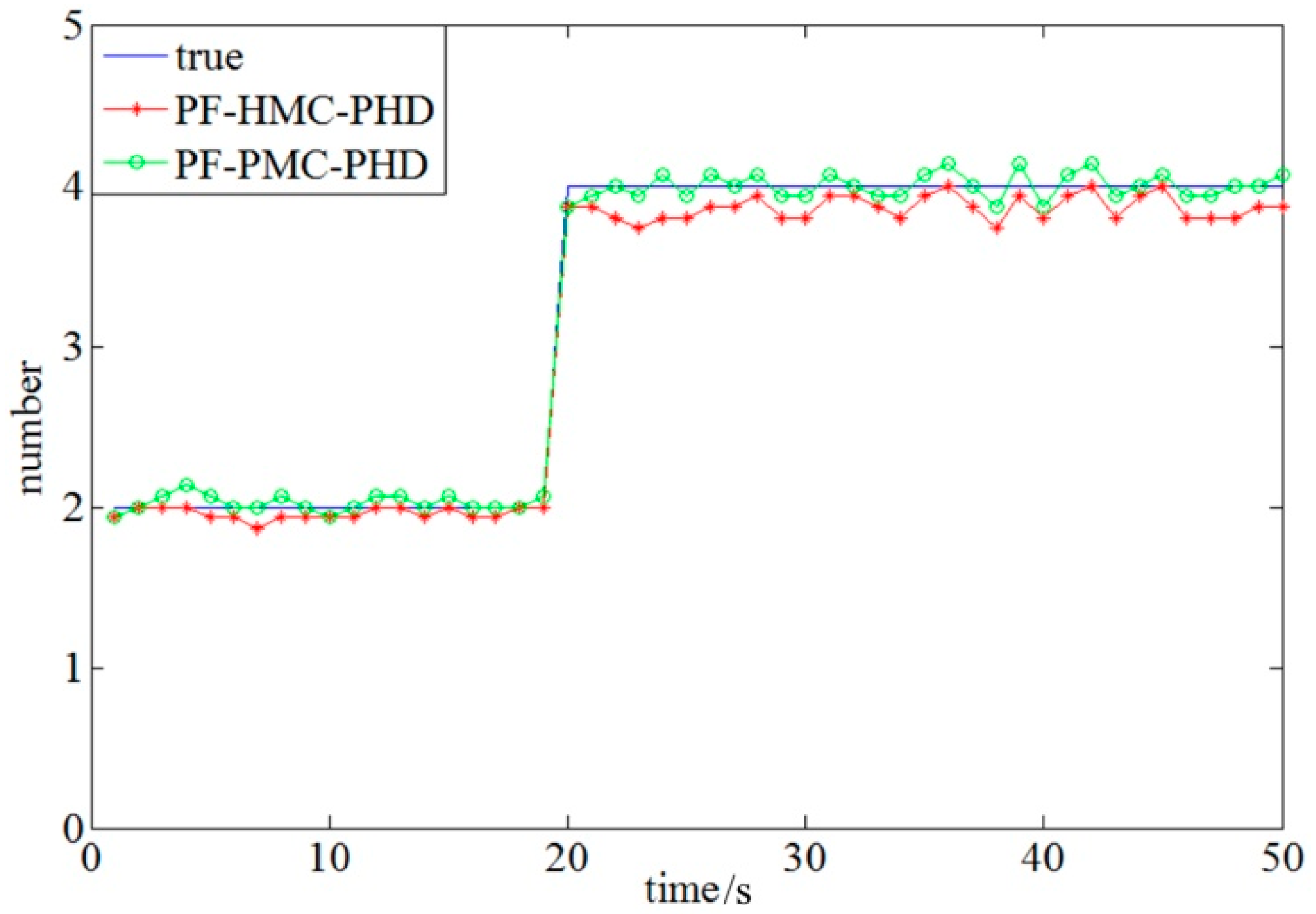
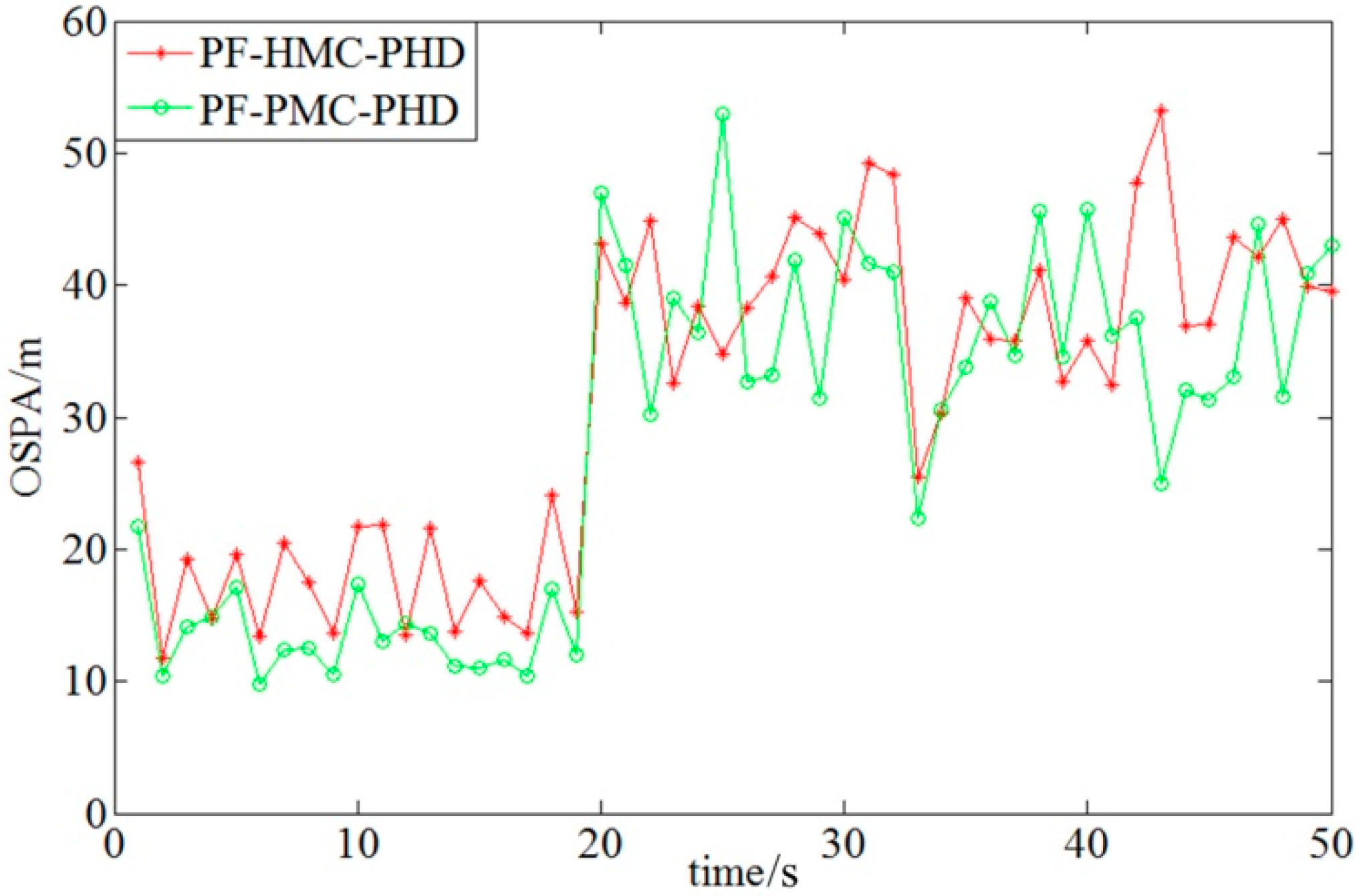
4.2. Performance Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mahler, R. An Introduction to Multisource-Multitarget Statistics and Its Applications; Technical Monograph for Lockheed Martin: Eagan, MN, USA, 2000. [Google Scholar]
- Mahler, R.P. Statistical Multisource-Multitarget Information Fusion; Artech House, Inc.: Norwood, MA, USA, 2007. [Google Scholar]
- Mahler, R.P. Multitarget Bayes Filtering via First-Order Multitarget Moments. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1152–1178. [Google Scholar] [CrossRef]
- Vo, B.N.; Singh, S.; Doucet, A. Sequential Monte Carlo methods for multi-target filtering with random finite sets. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1224–1245. [Google Scholar]
- Gao, Y.; Jiang, D.; Liu, M. Particle-gating SMC-PHD Filter. Signal Process. 2017, 130, 64–73. [Google Scholar] [CrossRef]
- Vo, B.N.; Ma, W.K. The Gaussian mixture probability hypothesis density filter. IEEE Trans. Signal Process. 2006, 54, 4091–4104. [Google Scholar] [CrossRef]
- Yang, J.; Li, P.; Yang, L.; Ge, H. An Improved ET-GM-PHD Filter for Multiple Closely-spaced Extended Target Tracking. Int. J. Control Autom. Syst. 2017, 15, 468–472. [Google Scholar] [CrossRef]
- Pieczynski, W. Pairwise Markov chains and Bayesian unsupervised fusion. In Proceedings of the International Conference on Information Fusion, Paris, France, 10–13 July 2000. [Google Scholar]
- Derrode, S.; Pieczynski, W. Signal and image segmentation using pairwise Markov chains. IEEE Trans. Signal Process. 2004, 52, 2477–2489. [Google Scholar] [CrossRef]
- Pieczynski, W. Pairwise Markov chains. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 634–639. [Google Scholar] [CrossRef]
- Petetin, Y.; Desbouvries, F. Bayesian multi-object filtering for pairwise Markovchains. IEEE Trans. Signal Process. 2013, 61, 4481–4490. [Google Scholar] [CrossRef]
- Mahler, R. Tracking targets with pairwise-Markov dynamics. In Proceedings of the International Conference on Information Fusion, Washington, DC, USA, 6–9 July 2015; pp. 280–286. [Google Scholar]
- Schuhmacher, D.; Vo, B.-T.; Vo, B.-N. A consistent metric for performance evaluation of multi-object filters. IEEE Trans. Signal Process. 2008, 56, 3447–3457. [Google Scholar] [CrossRef]
- Martino, L.; Read, J.; Elvira, V.; Louzadaa, F. Cooperative parallel particle filters for on-line model selection and applications to urban mobility. Digit. Signal Process. 2017, 60, 172–185. [Google Scholar] [CrossRef]
- Drovandi, C.C.; McGree, J.; Pettitt, A.N. A sequential Monte Carlo algorithm to incorporate model uncertainty in Bayesian sequential design. J. Comput. Graph. Stat. 2014, 23, 3–24. [Google Scholar] [CrossRef]








© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Wang, C.; Wang, W.; Li, Z. Particle Probability Hypothesis Density Filter Based on Pairwise Markov Chains. Algorithms 2019, 12, 31. https://doi.org/10.3390/a12020031
Liu J, Wang C, Wang W, Li Z. Particle Probability Hypothesis Density Filter Based on Pairwise Markov Chains. Algorithms. 2019; 12(2):31. https://doi.org/10.3390/a12020031
Chicago/Turabian StyleLiu, Jiangyi, Chunping Wang, Wei Wang, and Zheng Li. 2019. "Particle Probability Hypothesis Density Filter Based on Pairwise Markov Chains" Algorithms 12, no. 2: 31. https://doi.org/10.3390/a12020031
APA StyleLiu, J., Wang, C., Wang, W., & Li, Z. (2019). Particle Probability Hypothesis Density Filter Based on Pairwise Markov Chains. Algorithms, 12(2), 31. https://doi.org/10.3390/a12020031