1. Introduction
The successful flight of Colombia in 1981, the first space shuttle of the United States, pioneered the partial reuse of a space launch vehicle [
1]. However, it had high launch costs and a long preparation period. Applying the learning experience from this shuttle mission [
2], NASA implemented the second-generation reusable launch vehicle (RLV) research program. At present, X-37B has been successfully launched several times, with the longest orbiting flight time of 718 days [
3], demonstrating a breakthrough in RLV technology.
As a new type of aerospace flight vehicle, the effects of system failure caused by various actuators, sensors, or system components are of more concern to researchers. Statistics from the Federal Aviation Authority (FAA) and the National Transport Safety Board (NTSB) show that among the flight accidents over the past decade, hardware and system failure were the main cause of loss-of-control during flight [
4]. Considering the harsh aerospace environment and the complexity of aerospace tasks, there is a call for intelligent fault tolerance control that can handle component faults and does not increase hardware complexity, cost, and mass [
5].
RLV reentry usually relies on the thruster to supplement the aerodynamic actuator for attitude control. Specifically, during orbit, deorbit, and initial reentry phase, the thruster is the main actuator for the attitude control of the RLV.
Currently, the pulse width modulation (PWM) method [
6,
7] is mainly used for thruster control in spacecraft. When a duty cycle of a thruster is modulated using this method, the thruster can be considered as a continuous actuator. Its advantage lies in the application of the continuous multivariable control method to the RLV’s attitude control. However, the PWM method requires a thruster that is capable of high-frequency operation, which may lead to excessive wear of the thruster valve. In addition, the PWM duty cycle of the thruster system is subject to a certain practical limit [
8].
One common approach to detect and isolate spacecraft thruster faults is to install pressure, temperature, and electrical sensors on the thrusters. The use of these additional sensors makes the fault detection and isolation quite simple and robust, as these sensors can assist in the direct detection of thrust. However, the need for additional sensors adds to the complexity, mass, and volume requirements of the spacecraft. This type of system is used, for example, on NASA’s space shuttle orbiter [
9]. When such extensive sensing is unavailable, an online fault diagnosis approach for thrusters can play an emergency role in the cases of hardware sensor failure or work as a supplementary reference for online monitoring [
10].
A maximum-likelihood-based approach was proposed in the literature [
11,
12] to detect leaking thrusters for the space shuttle orbiter’s reactive control system jets; the soft failure was used to designate a fuel or oxidizer leak in a vehicle reactive control system jet. For the fuel leak, it only described the state in which one valve was open and the jet did not fire, but it did not consider the fuel leak after valve wear and other valve failure cases. In the literature [
13,
14], fault detection and isolation methods were developed based on the exponentially weighted recursive least squares estimation using an accelerometer and angular rate sensors. A neural network then provided adaptive control reconfiguration to multiple destabilizing hard and soft thruster faults. However they did not provide an analysis of the failure caused by thruster valves, or, more particularly, the impact of thruster failure caused by valve performance degradation on the RLV or spacecraft. A nonlinear fault detection observer was designed in literature [
15] to realize active fault tolerance tracking and RLV attitude control, combined with adaptive sliding mode technology, by the actuator redundancy. However, the fault detection observer was assumed to be idealized and less affected by the sensor noise and disturbances. In the literature [
16], a velocity-free nonlinear proportional-integral control allocation scheme was provided for the fault-tolerant attitude control of flexible spacecraft under thruster redundancy. A uniform actuator fault model was established, but the system states before and after the fault were not considered; moreover, the noise signals that approximate the control input were also not regarded, leading to an output error from the model. The literature [
17] proposed a sliding mode observer with an equivalent output injection to reconstruct external disturbances and actuator faults and developed a sliding mode-based attitude controller using an exponential reaching law. The exponential reaching law relies on the state of the system and the corresponding formation of the estimated parameters, although in the theoretical design process, the authors described the partial failure of the thruster using the thruster fault modeling. However, it could not detect faults under low thrust conditions due to the thruster leakage in the simulation verification process. The simulation results also showed that the fault detection time frame of the designed sliding observer was more than 6 s. In literature [
18], an observer-based fault-tolerant controller was constructed such that the states of the resulting closed-loop systems were uniformly and ultimately bounded in the presence of model parameter uncertainty, external disturbances, time-varying input delay, actuator faults, and actuator saturation. However, the controller gain matrix and observer gain matrix were required to be designed for satisfying the results of the uniformly and ultimately bounded system. This method helped in dealing with several problems at the expense of optimal control performance in different situations, and the fixed gain of the observer did not consider the requirements of specific fault detection such as false alarm rates, fault detection rates, and fault detection time.
Literature [
19] showed that any motion-based fault detection and isolation is reliant on the accuracy of the measurement data used, thus, great care has been taken here to obtain highly accurate angular and translational acceleration estimates from the gyros and accelerometers. The motion-based method presented in this work was used and extended in this research.
Unlike previous studies, in this study, the failure of thruster valves, including valve wear and leakage failure in addition to valve jams and difficulty in closure, was investigated. We proposed a detection solution for the failures based on motion state estimation with particular consideration of the noise that affects the RLV operation in initial reentry, on-orbit, and de-orbit phase, which is caused by electromagnetic radiation in near-Earth space [
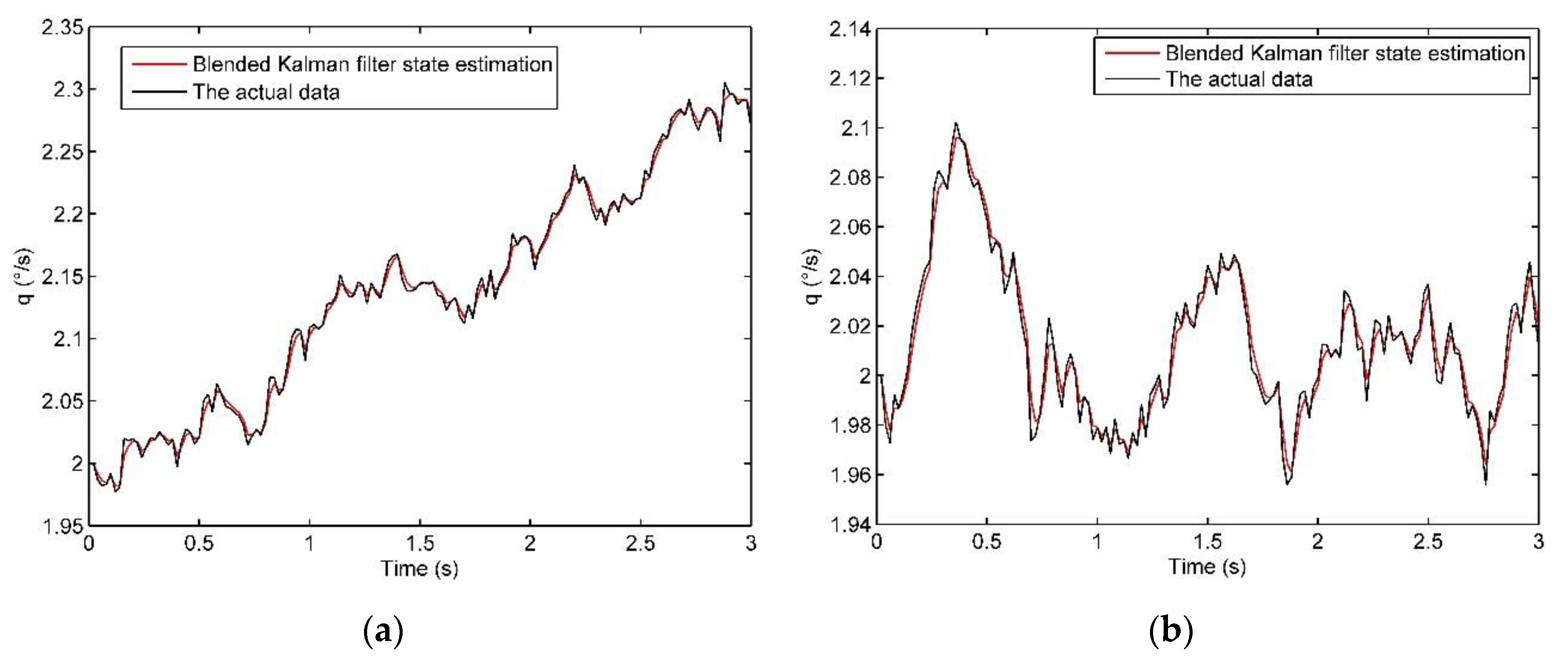
20]. In this paper, a physical filter was used in combination with a Kalman filter to suppress the input interference of the approximate control of the thruster valve, enhance the consistency of physical input and algorithm model input, improve the accuracy of motion state estimation, and thereby improve the fault detection rate.
The paper aims at developing an online thruster fault detection method that can handle thruster valve failure and does not increase more hardware complexity or cost.
Firstly, the failure of thruster valves under different working conditions was analyzed, and the thruster model caused by valve failure was established.
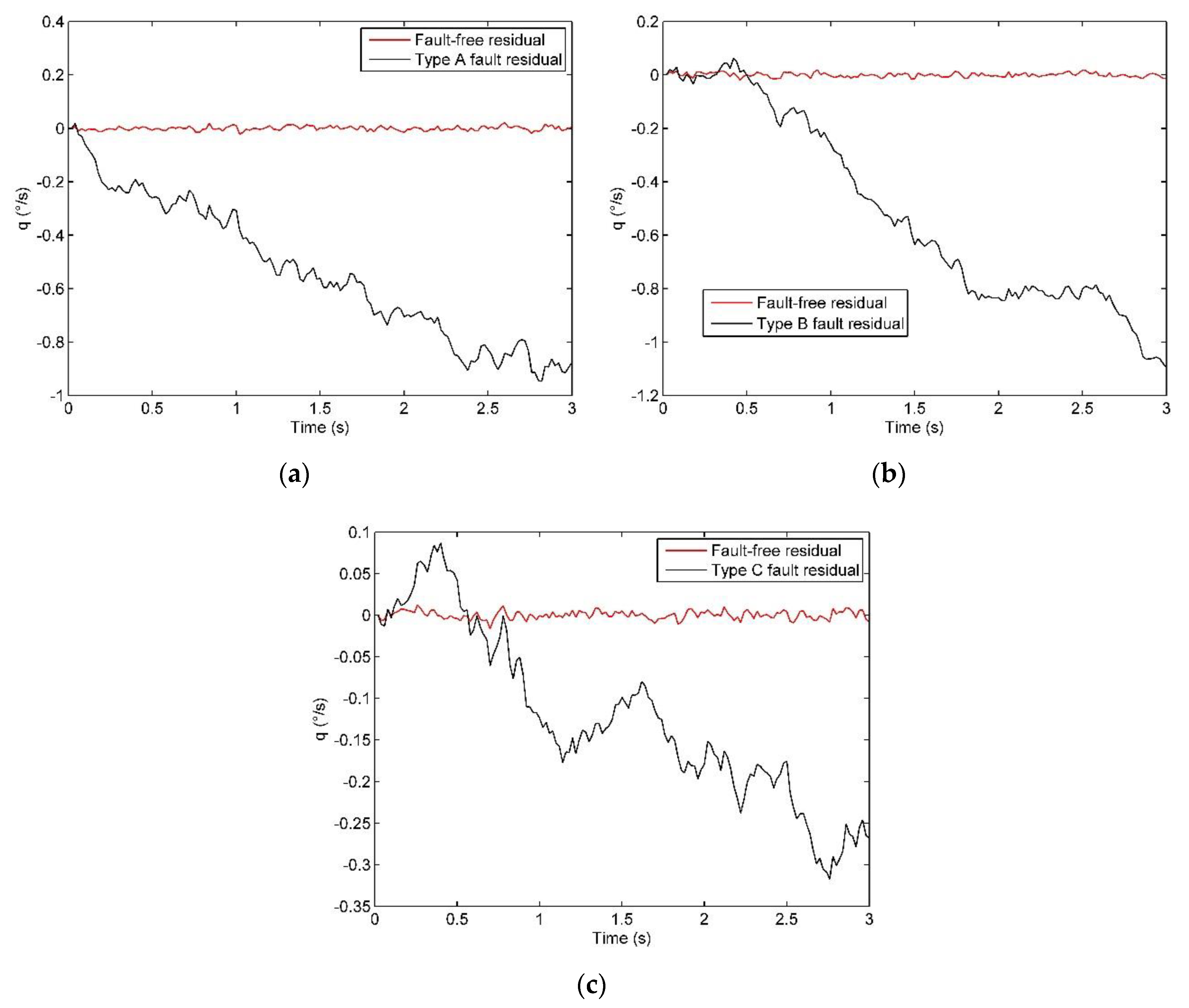
Then, on the basis of the thruster model, a motion-based blending filter fault detection method is proposed. The blending filter was used to estimate the thruster state and suppress the noise signals that approximate the control signal. The fault detection was conducted by comparing the variance-based function of the observed output in a certain time window with the threshold.
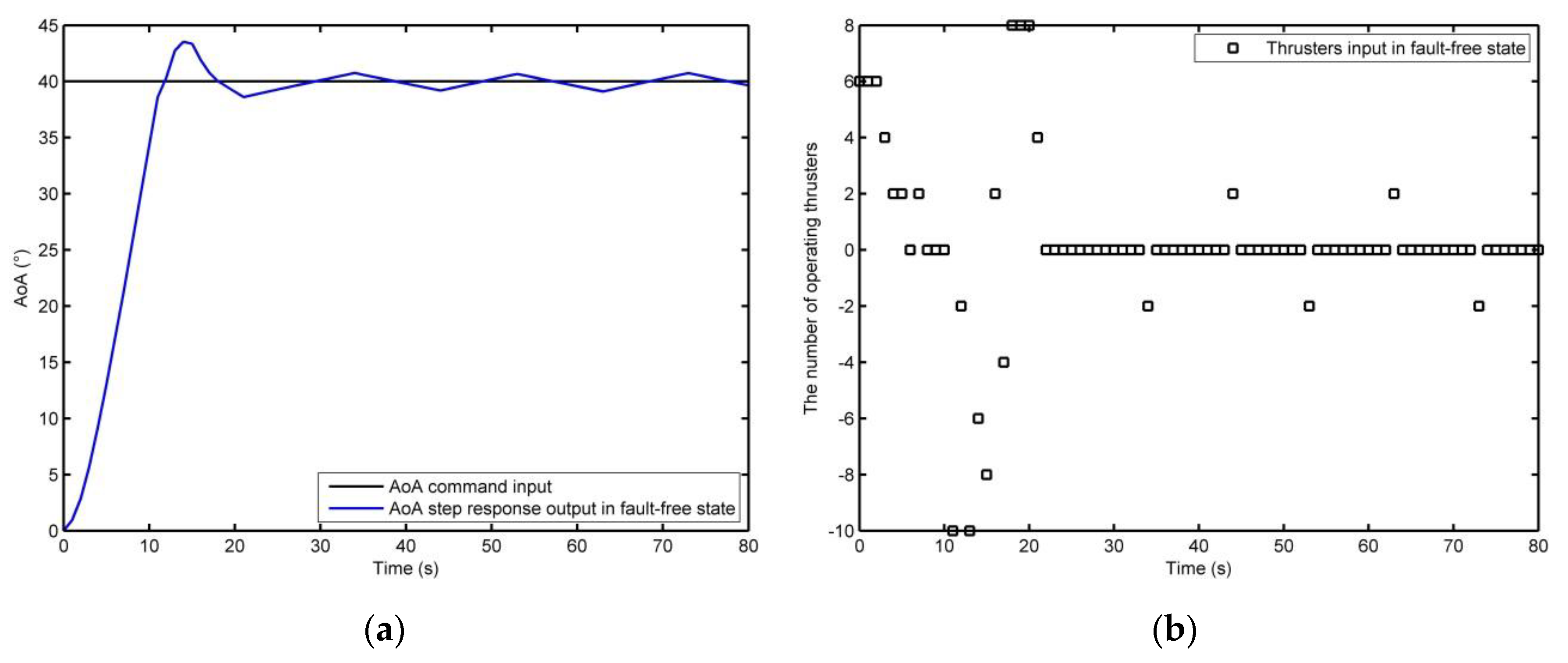
Finally, based on the thruster redundancy, a nonlinear model-based numerical control prediction method is proposed to evaluate whether the remaining fault-free thruster can track the attitude control response performance under thruster valve failure, and conducted for longitudinal attitude control as an example.
3. Thruster Control Recovery Evaluation Based on Proposed Fault Detection
An RLV is a highly maneuverable vehicle that can implement missions of on-orbit, de-orbit, and reentry in the atmosphere. For different missions, the attitude control response needs to achieve different performances according to guidance commands, but when the working thrusters fail, the attitude control response performance will be affected. As an important actuator for an RLV, the thruster is usually designed with redundancy to ensure a safe flight. Based on the redundancy of the thruster, stopping the thruster failure and quickly selecting the fault-free thruster to recover the attitude control response performance are very helpful to improve the fault-tolerant ability of the RLV.
This section describes the nonlinear model-based numerical prediction method that was used to evaluate whether the remaining fault-free thrusters can track the attitude control response performance under the failure of the thruster valve.
The attitude control response includes the following parts:
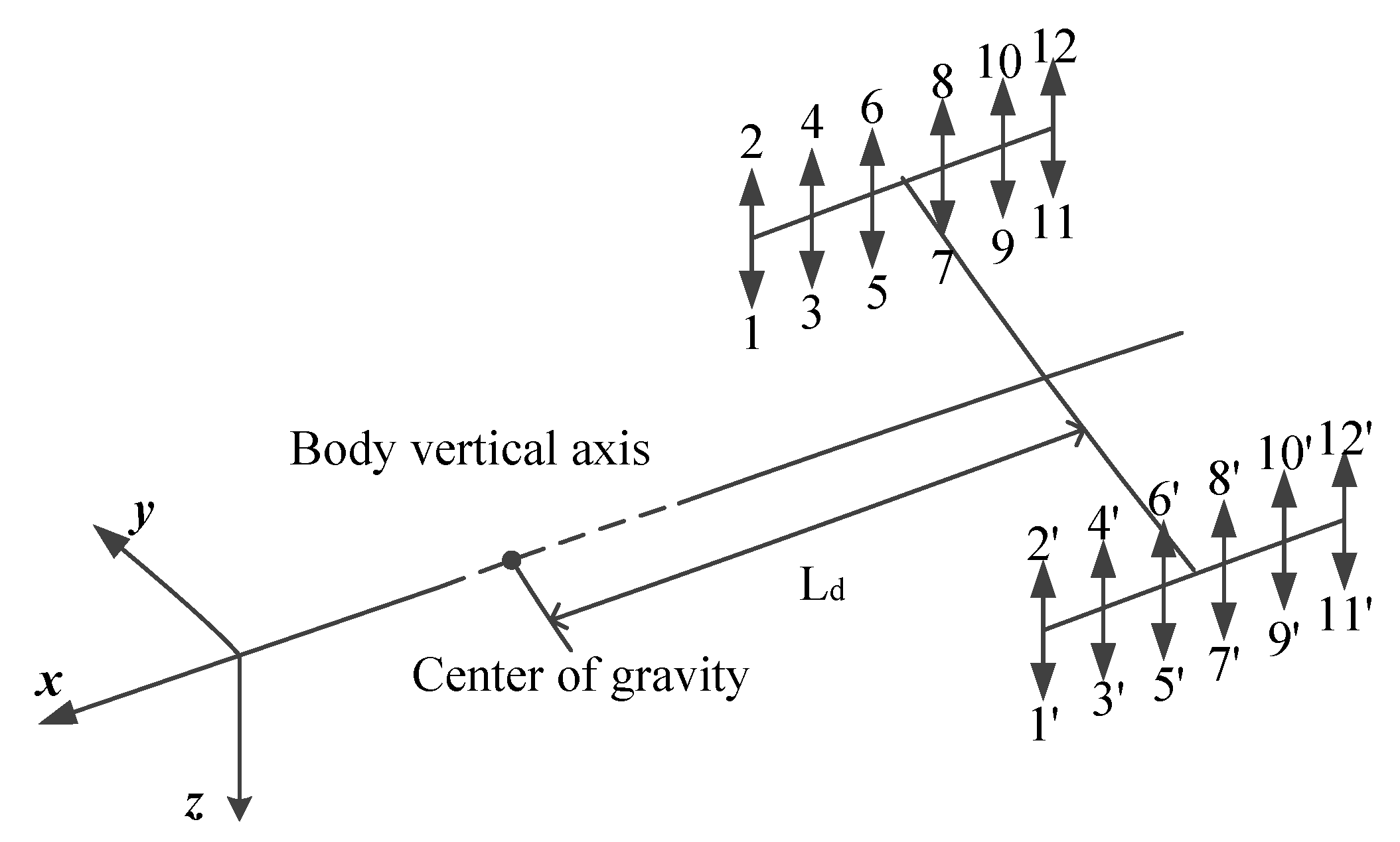
In the RLV’s longitudinal attitude loop, it has a plurality of thrusters for pitch control; the force generated by a single thruster is
F, the maximum thrust generated by the thrusters is
Fmax, and the fault boundary of the thruster is
Fhold, as shown in
Figure 5.
For RLV longitudinal attitude control, the thrusters provide directional impulses in the -axis.
Considering the RLV’s longitudinal attitude nonlinear model from Equation (1), M represents the operating pitch moment of thrusters,
where
corresponds to the output of the
thruster, see Equation (2),
is the switch command of the
thruster valve for two states 0 and 1. The command to turn off the thruster valve is 0, and that to turn on the thruster valve is 1.
is the distance from the acting force to the center of gravity of the RLV.
In this study, when the fault was detected, the working thrusters were isolated and the other thrusters were employed to track the attitude control response performance. It is important to note that multiple thruster control allocation schemes may satisfy the attitude control response performance; however, minimum consumption of energy is the foremost objective for control allocation strategy:
where
represents each thruster control allocation scheme of energy consumption in a selected time frame,
is the number of working thrusters at each control period and
is the priority objective for the control allocation strategy.
An allocation scheme for thruster control that can satisfy the attitude control response of performance was determined in three steps.
The first step was to calculate the gain
according to the required rise time after the attitude angle control command was given. The specific algorithm is as follows:
| Algorithm 1: gain numerical calculation for rise time requirement |
![Algorithms 12 00228 i001]() |
where
is the pitch rate reference command,
is then given command of the AoA,
is the deviation between the pitch rate reference command and the feedback,
is the adjustment gain in the limit range
of the RLV’s pitch acceleration,
is the reference pitch acceleration, and
is the expected control moment. RK45 is the Runge–Kutta method including Equation (1).
The second step is to calculate the control moment and identify the thruster control allocation scheme satisfying the steady-state error requirement based on Algorithm 1. The specific algorithm is as follows:
| Algorithm 2: Nonlinear model-based numerical control |
![Algorithms 12 00228 i002]() |
where
is the deviation between the AoA command and the feedback,
is the remaining fault-free thruster working number,
is the control moment from a single thruster,
is the control moment for each control period, and
is an assumed control moment. The condition of
, the algorithm used a circular prediction calculation by the Runge-Kutta method (RK45) to match it with
input and the flight dynamics model;
was replaced in turn from rest fault-free thruster
at each cycle to find the optimized control moment.
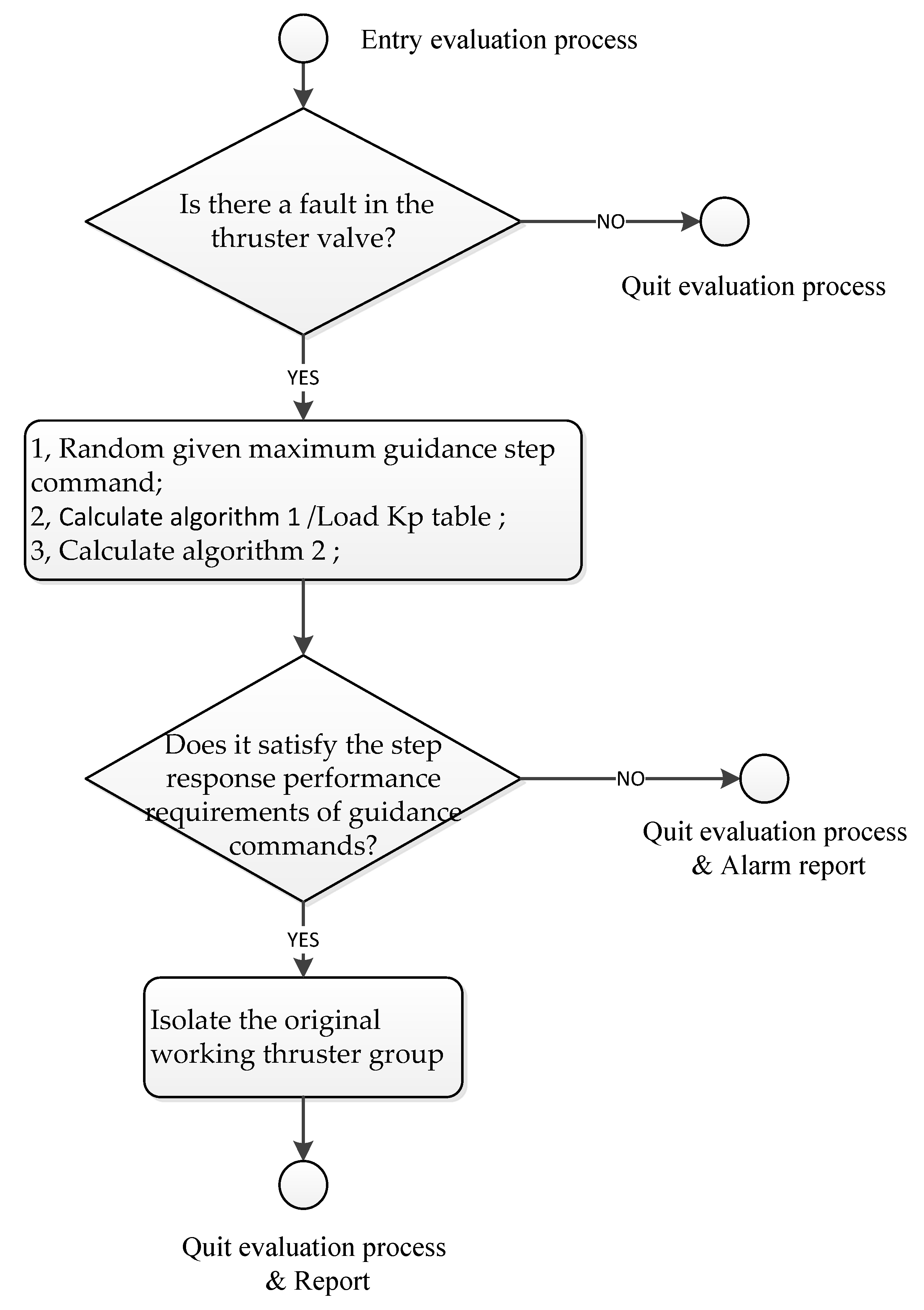
The third step is to evaluate whether the remaining fault-free thruster that can track the attitude control response performance under the failure of the thruster valve using the nonlinear model-based numerical control prediction. The prediction flow chart is as following
Figure 6:
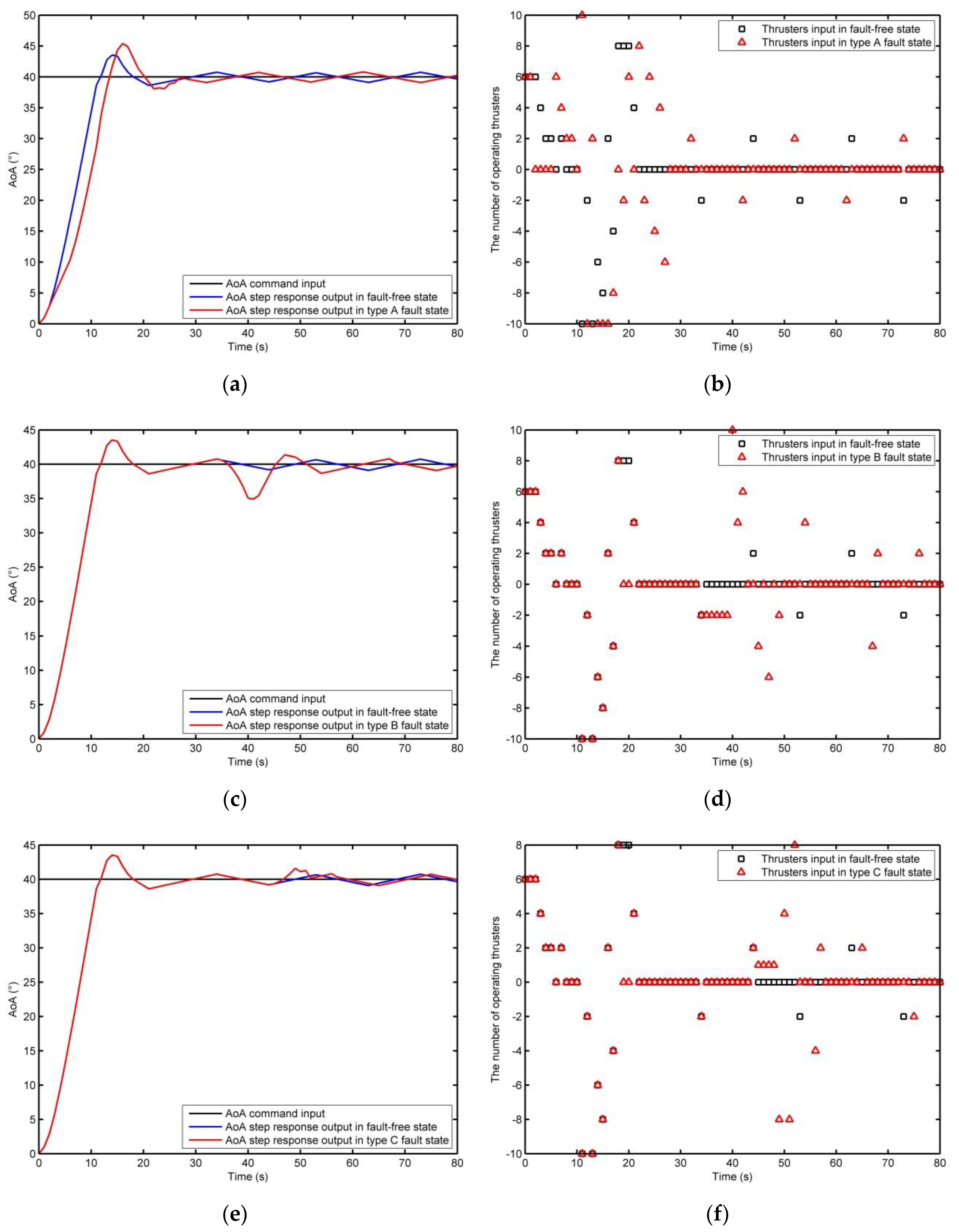
In conclusion, the multi-thruster, from a working equivalence point of view, can be regarded as a single thruster. The upper limit of the thruster can be set, and fault detection and isolation can be conducted based on the three types of faults, with the isolation state either turned on or off for all of the types. A numerical calculation method based on a nonlinear model was used to evaluate control recovery and determine if the fault-free thruster could track the attitude control response performance following failure of a thruster valve.
5. Discussion
The PWM method is a mature technology of thruster control and is widely used [
6,
7,
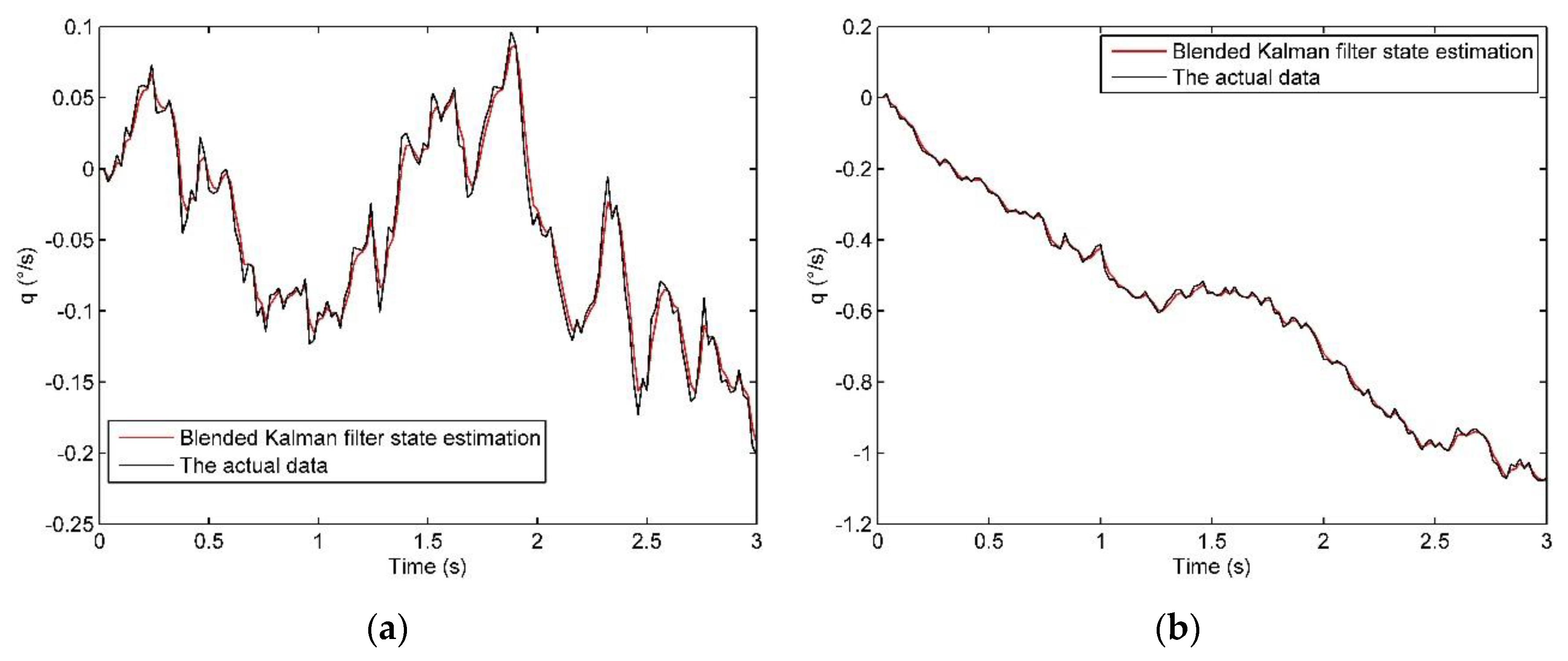
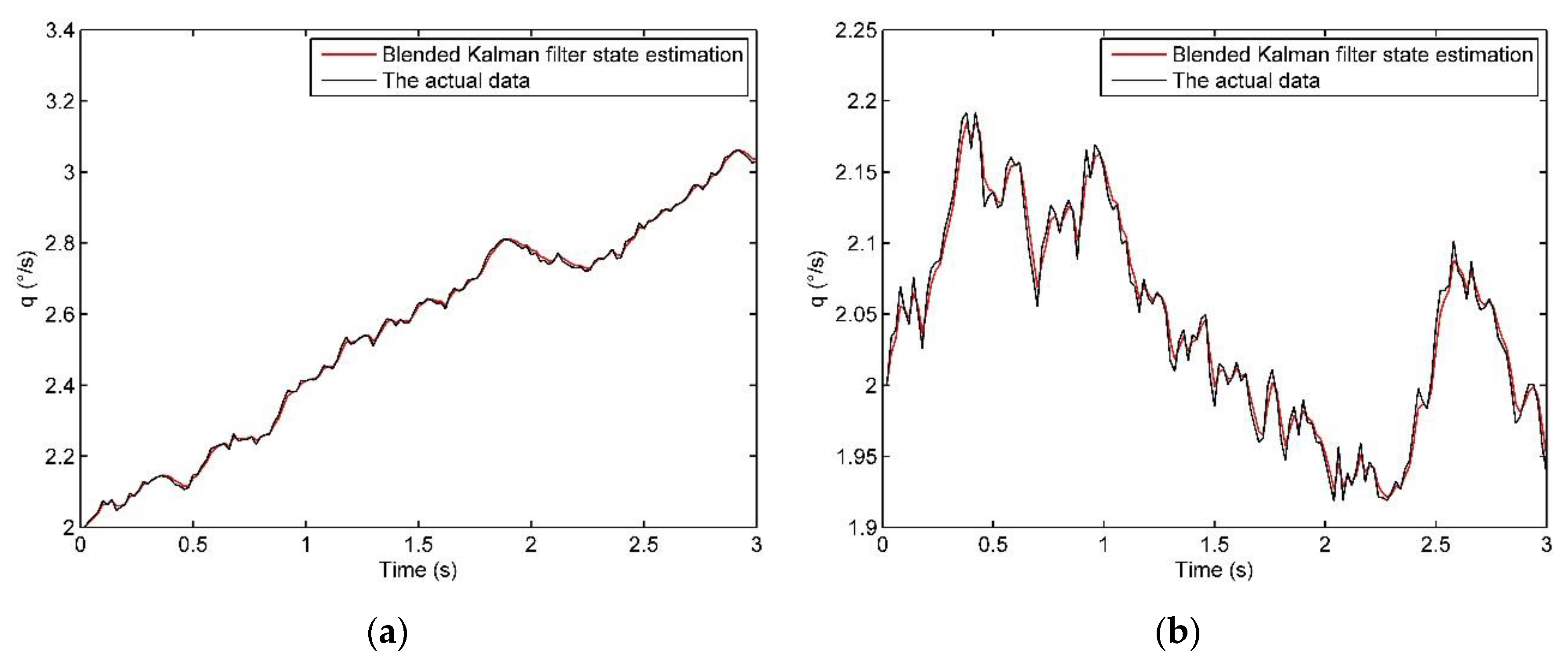
8], but its high-frequency on/off thruster valve operation and valve lifetime are the main causes of the failure problems studied in this paper. Motion-based diagnosis has been proven to be effective [
19], and Kalman filtering has been applied in engineering for a long time, however, some shortcomings existed in the proposed research of motion-based fault diagnosis. The approximate control signal noise has a serious impact on Kalman filter model-based state estimation. The frequency of the noise is different from that of the control signal. Therefore, a bandpass filter was introduced to suppress the approximate control signal noise. At the same time, Kalman filtering was used to estimate the motion state and to detect the failure of the thruster valves. The simulation shown in
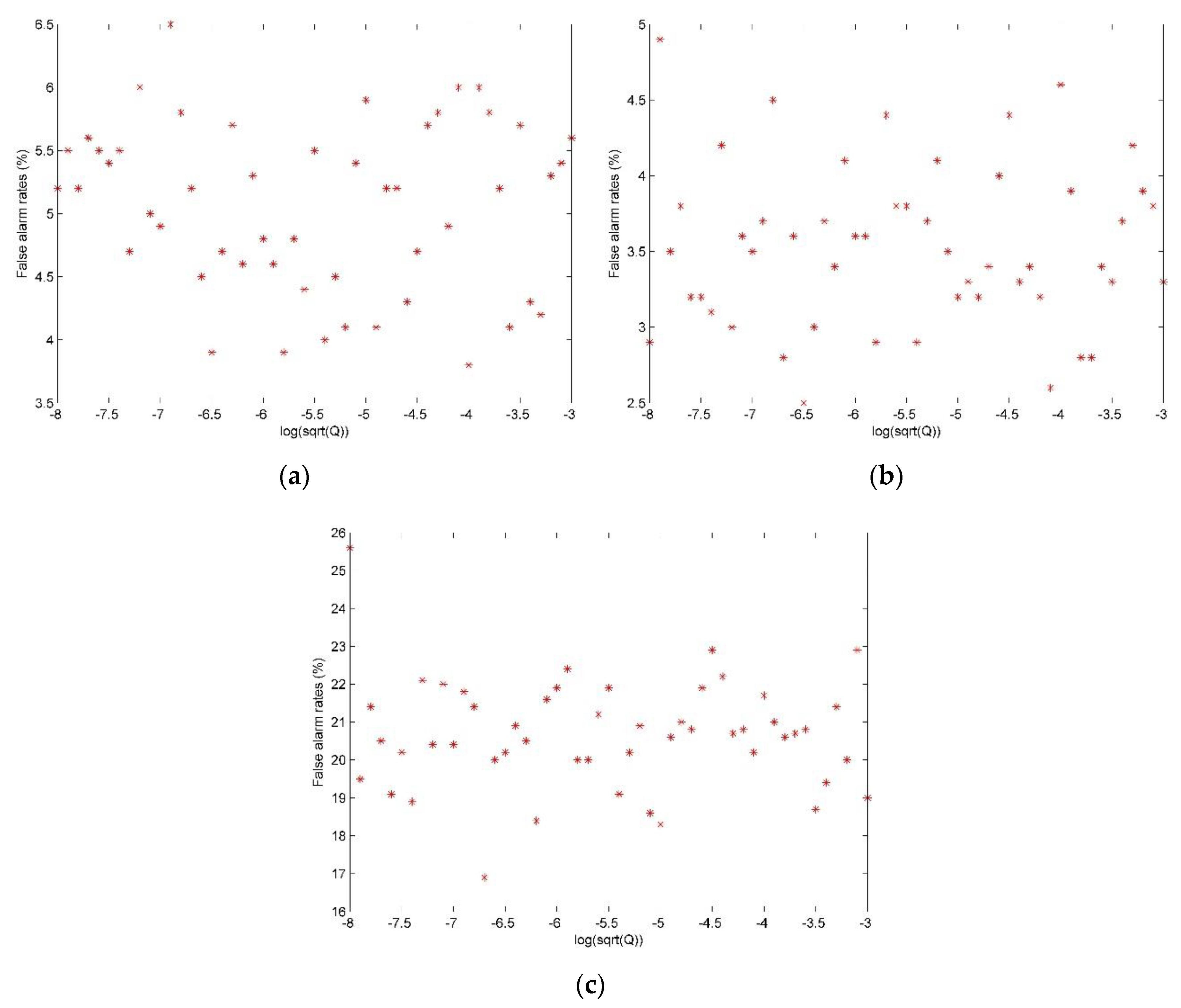
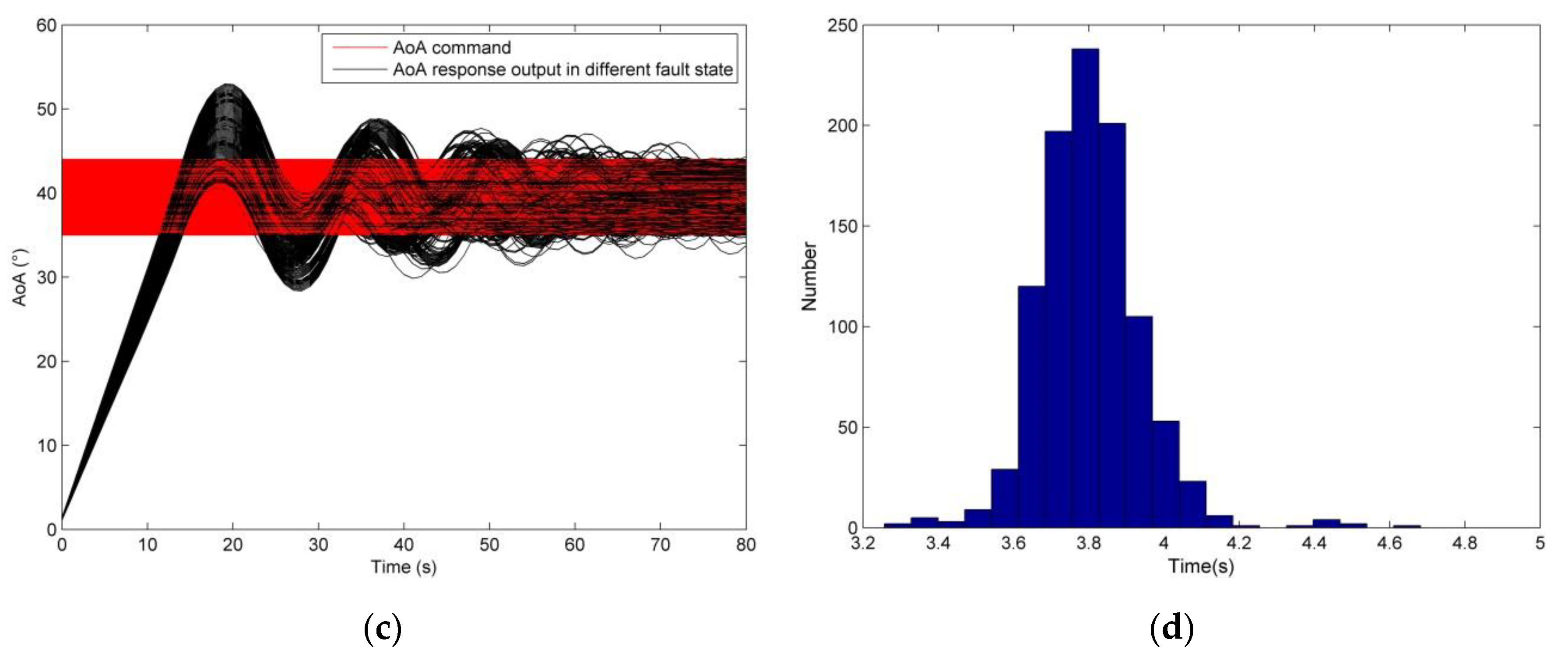
Figure 11 showed that the results met the criterion of the false alarm rates of 5% by blending the filter detection. In addition, to support the redundancy management of the thruster, a recovery evaluation method of employing the remaining fault-free thruster to track the command performance under the failure of a thruster valve was employed;
Figure 14 demonstrates the effectiveness of this method. The algorithm running time and stability were tested in 1000 cases, as shown in
Figure 14. The running time was between 3.2 s and 4.8 s, and the algorithm operated stably without a dead cycle.
In this study, several thruster missions, including on-orbit, de-orbit, and initial reentry, were assumed to be performed, in which the atmospheric density is close to vacuum. In the future, the extended application of this method, such as the aero-assisted orbital transfer mission, will be focused on, in which the atmospheric density is in the low-density state. In addition, the redundancy management of actuators will also be one of the key research directions in the future.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}