Mixed Order Fractional Observers for Minimal Realizations of Linear Time-Invariant Systems

 , ,
, ,  and
and
Abstract
1. Introduction
- In Section 2 we provide a mathematical framework for designing observer for LTIS, which includes systems defined by any generic fractional order derivative (GFOD) e.g., Caputo, Riemann–Liouville, etc. This is a subtle issue given the variety of fractional order derivatives (FOD) existent [7] and the fact that NMOO have been designed for specific type of derivatives [6,8,9,10,11,12]. In this framework, the concept of initial conditions (IC) is unambiguously defined and linear properties (superposition and separation) are easily obtained. Moreover, a minimal realization (MR) structure is chosen in the sense that the dimension of the internal variables is minimal and it is used the minimum number of parameters to describe the system, chosen to simplify the design. It yields a different structure from Luenberger observer.
- In Section 3 and Section 4 convergence and robustness conditions are provided for non-adaptive and adaptive minimal realization observers (MRO) for commensurate systems. The conditions obtained meet those of the integer order observers (IOO) [4] when particularized to them, and constitutes a contribution in the non-mixed fractional order observers (FOO) literature for the adaptive case (cf. [8,9,13,14]), the latter being especially challenging, since currently there is not a fractional Lasalle theorem [15] available. The importance of this contribution is supported by the capability of fractional order systems (FOS) to model complex phenomena [10,16,17], whereby observers are needed since the internal variables are usually not accessible.
- In Section 3 and Section 4 robust convergence conditions for adaptive and non-adaptive mixed-order observers (MOO) are stated, allowing in particular to design FOO for integer order systems (IOS) under the same assumptions than those of IOO. The difficulty is now to prove convergence and robustness for a system which is composed of subsystems with different DO. This novel idea makes possible (a) to dispose fractional calculus and their capabilities to model long memory effects [18] to observe real processes approximated by integer order (IO) linear systems, and (b) to have extra degrees of freedom (the derivation orders) to optimize criteria such as transient behavior, robustness, disturbance rejection, etc., which are relevant in current observer designs [19,20]. These advantages and some generalizations are qualitatively discussed in Section 3, Section 4 and Section 5 and a control application is developed in Section 6.
2. Linear Systems Preliminaries
- P1: The superposition of responses to a linear combination of inputs holds when the IC are null.
3. Non-Adaptive Mixed Order Observer (NAMOO)
- (a)
- If have additive bounded uncertainties, i.e., and , the estimates of internal variables and the output error remain bounded, having also high frequency rejection.
- (b)
- If parameter vector p (i.e., the elements of A and b) is in fact , where parameter disturbances n and y are bounded functions, then and remain bounded.
- (i)
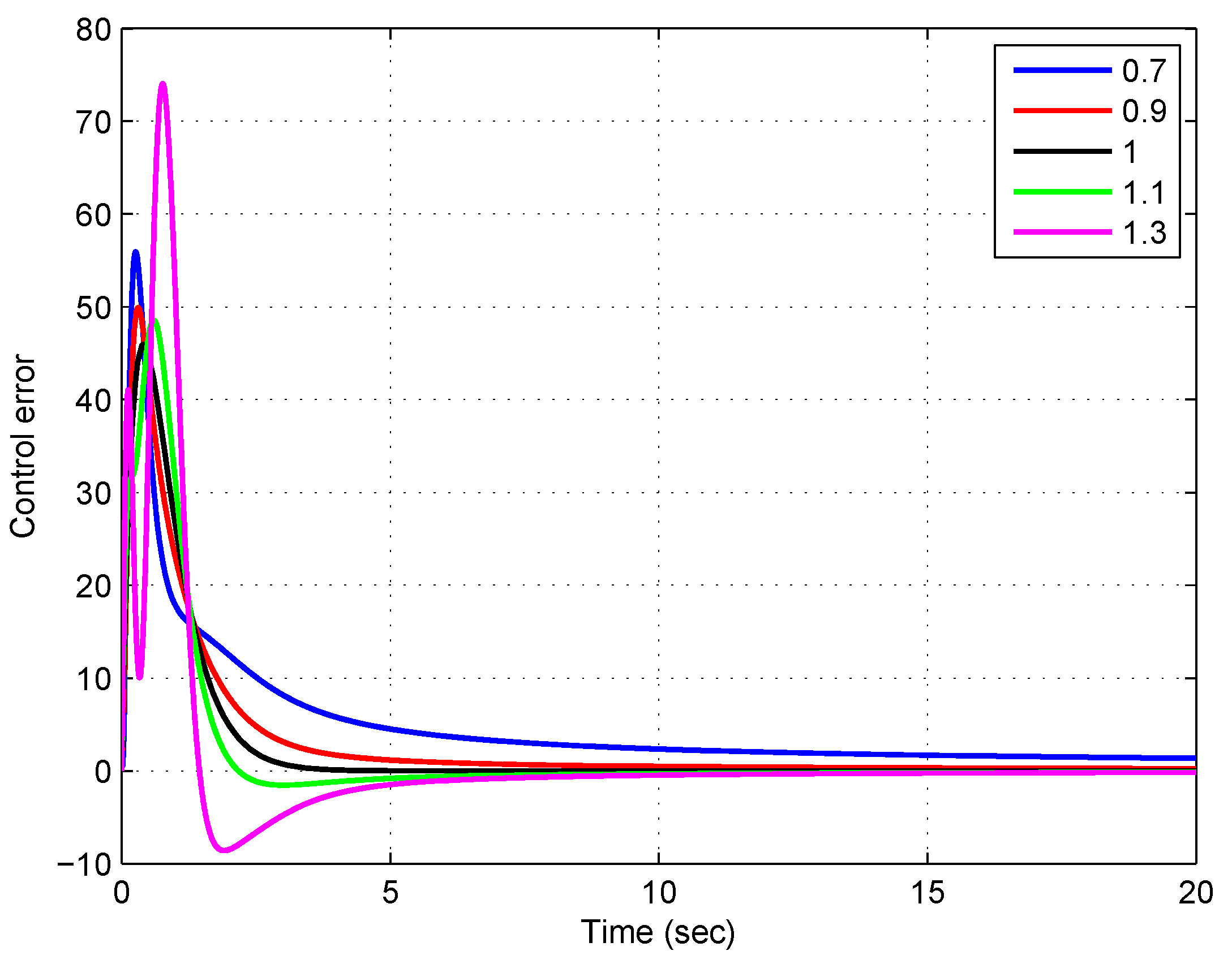
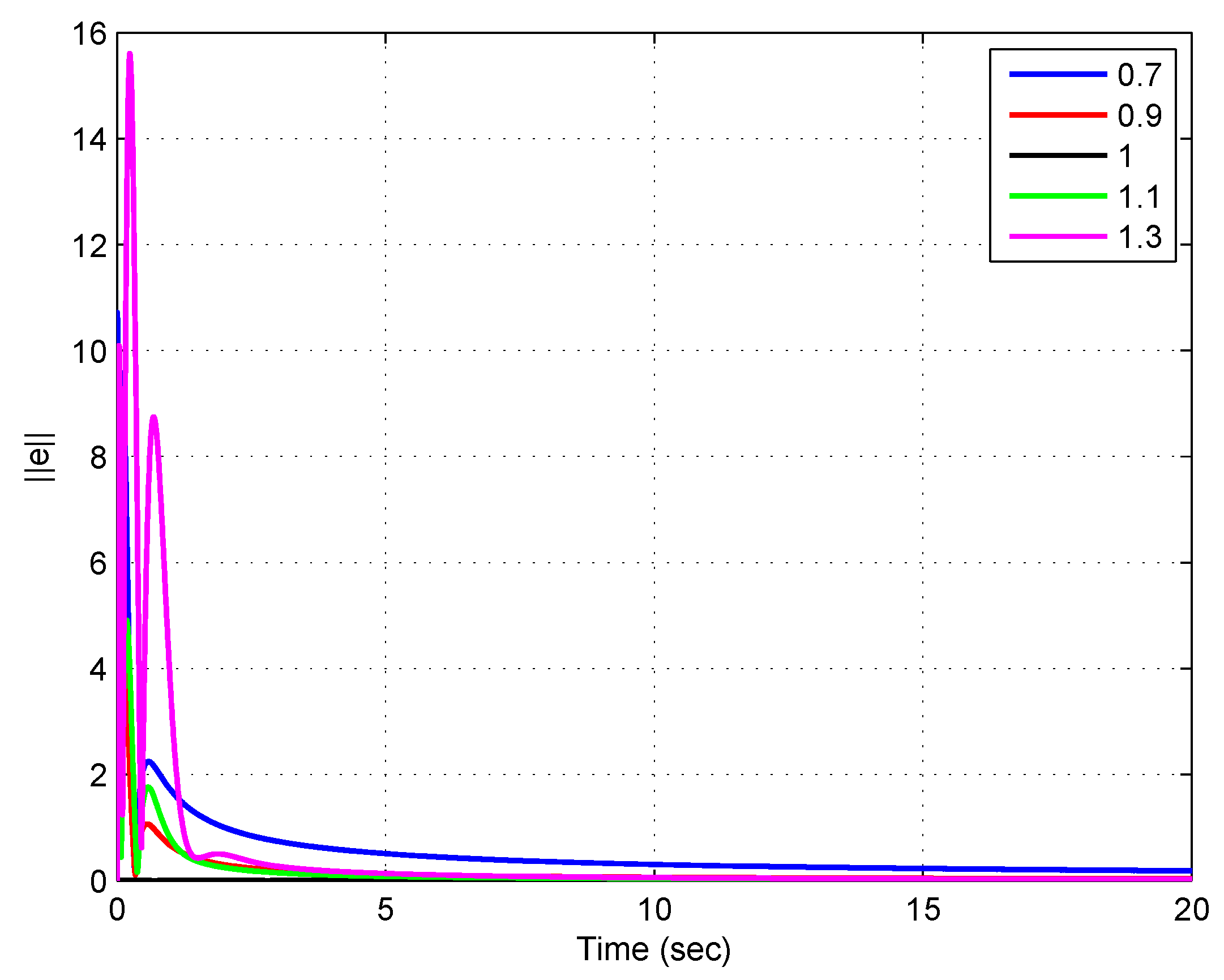
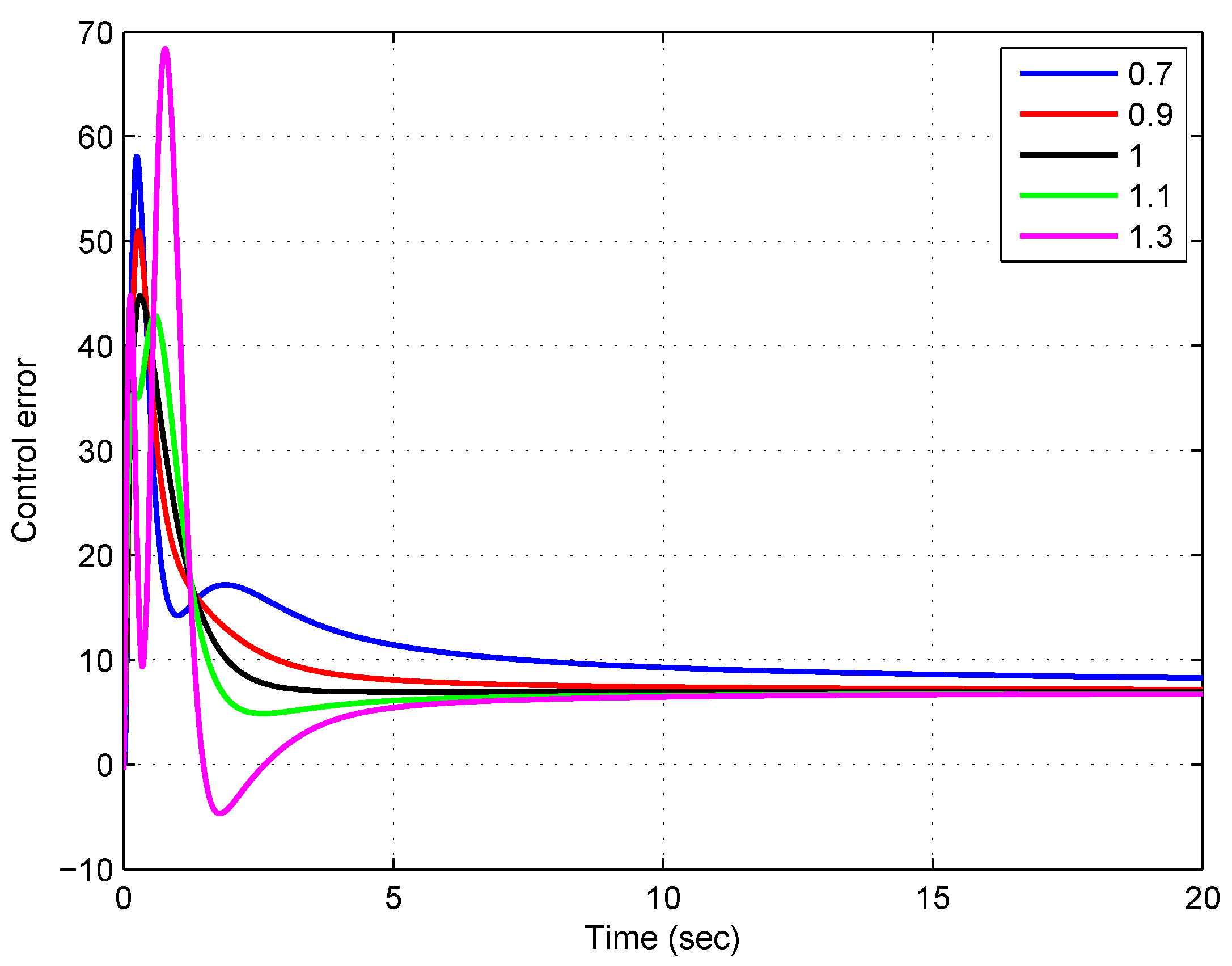
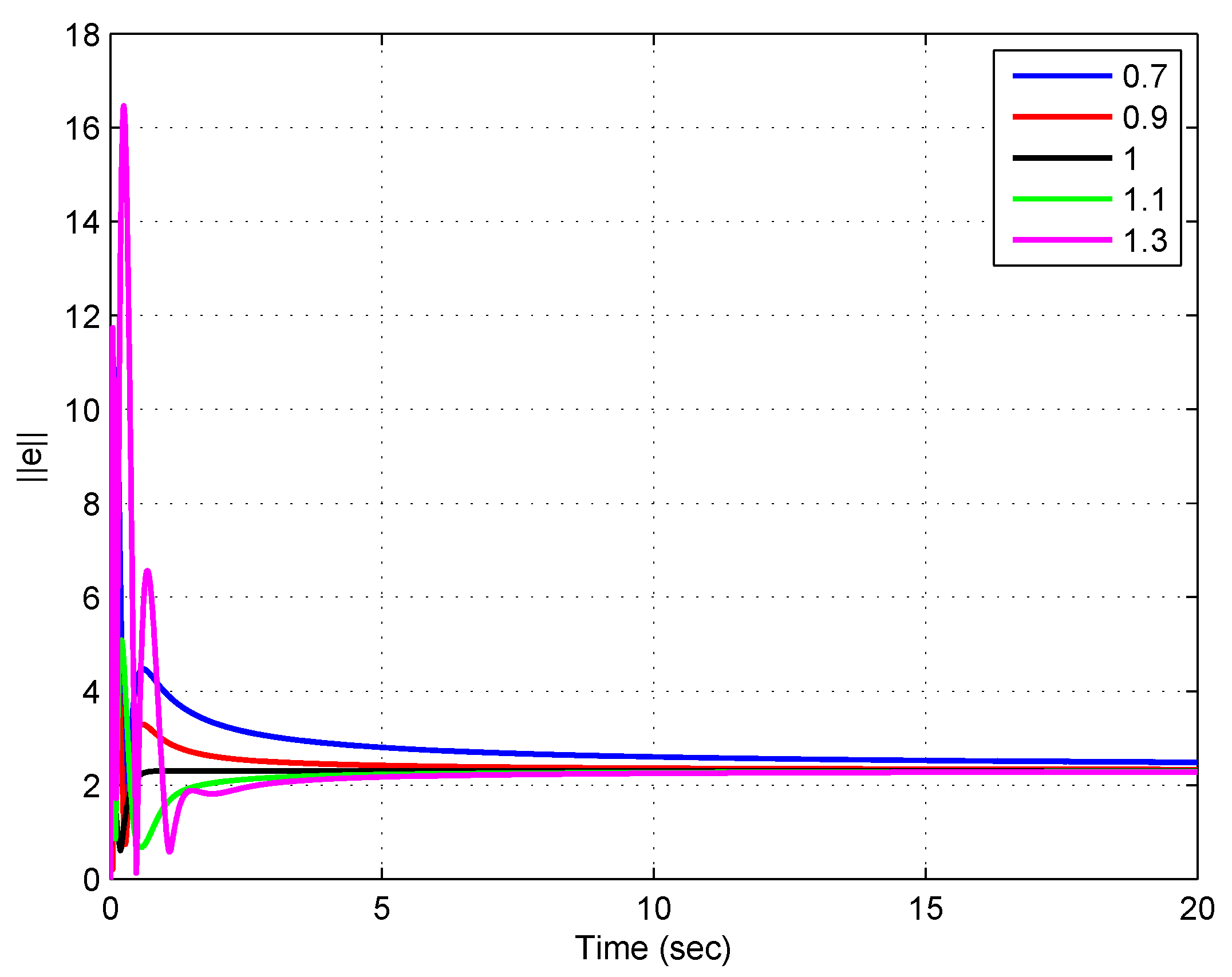
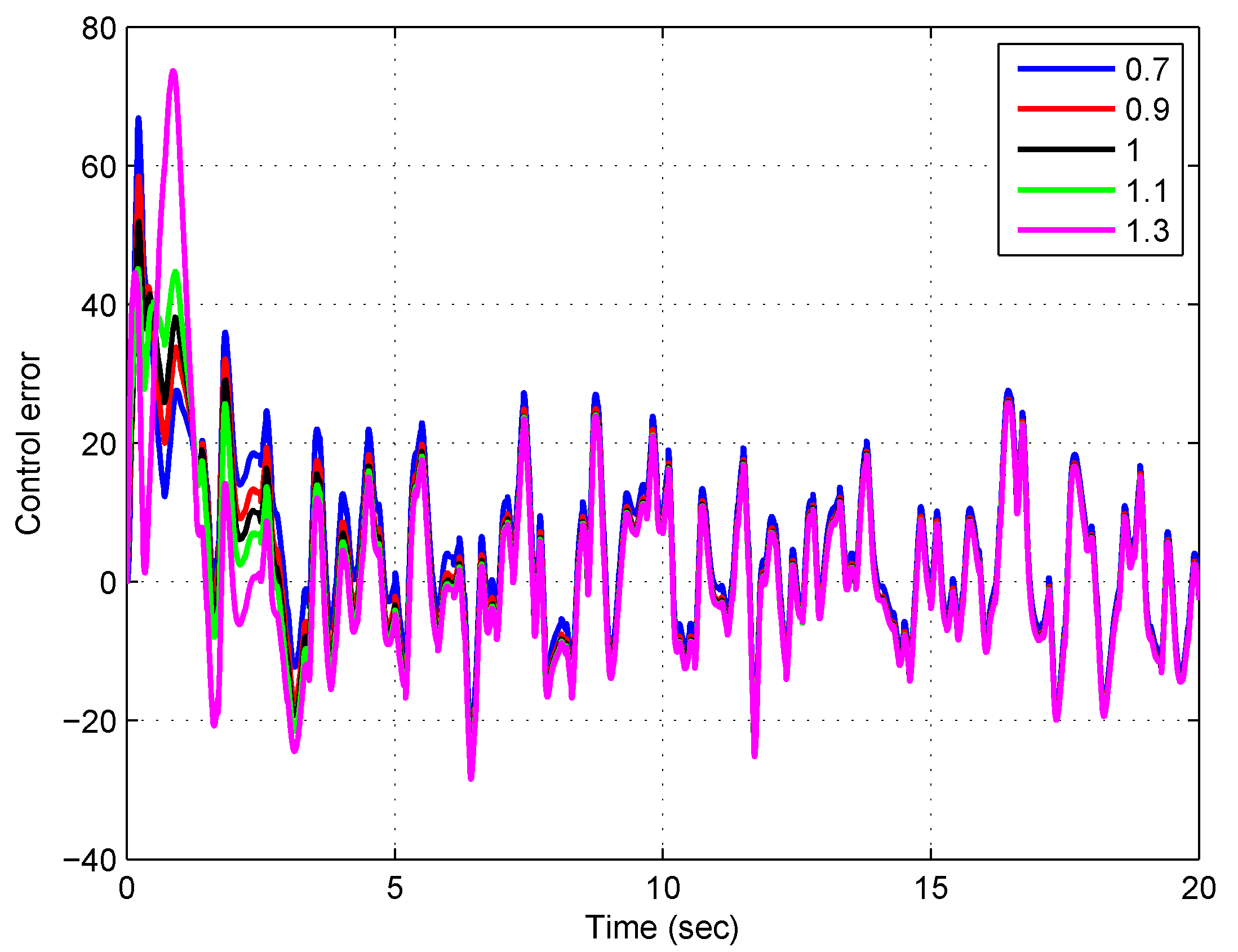
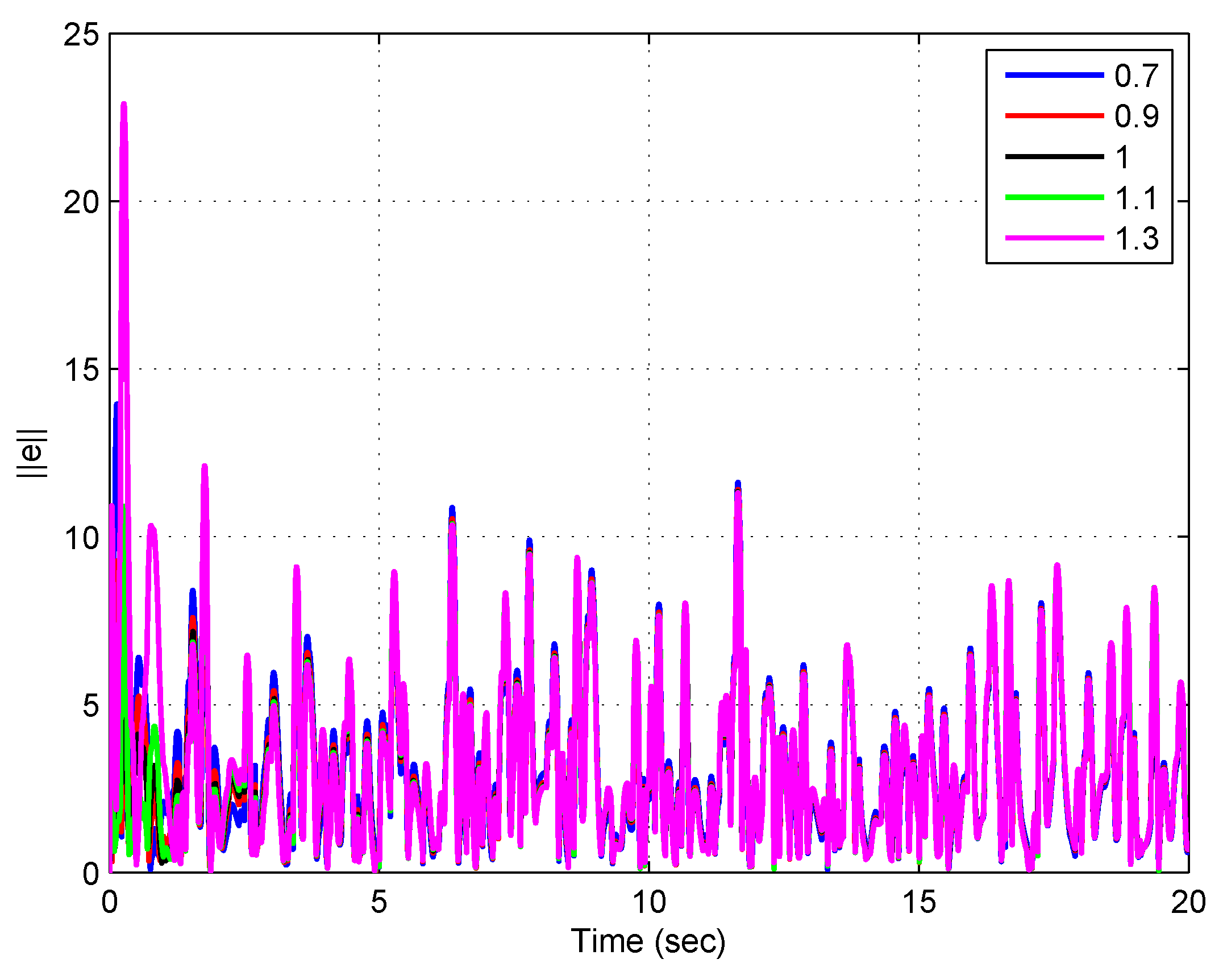
- A benefit of the MO approach to design observers is that the transient behavior of the estimate can be regulated by the choice of the FO β. A NMFOO where —like the Luenberger observer (11)—can only regulate the speed of convergence through the choice of F.
- (ii)
- Unlike Luenberger observer (11), there is no need of an output error feedback term . Since this term is essential in the stability proof of the Luenberger observer, the introduction of this term in our designs can give some freedom to further improvements.
4. Adaptive Mixed Order Observer (AMOO)
- (i)
- All the variables of the system remain bounded, has bounded γ-integral and its value converges to zero. These claims remain true if a bounded additive perturbation of quadratic bounded integral is added on the input and/or output of the system (6).
- (ii)
- If the spectral measure of u is not concentrated on points, then converges to the true parameters of the plant p and converges to x as .
- (i)
- Hence,where e is the output error and is the parameter error. It follows that has bounded integral. Indeed, from the hypothesis on , the choice of F and Lemma 1, and have bounded quadratic integral. By recalling that , we obtain that has bounded quadratic integral by (say) a constant number C.Without loss of generality, we assume (otherwise, we always can redefine W as ). Let . Note that V is non-negative, since has bounded quadratic integral. By ([25], Theorem 3) and continuity of the solutions, [26,27]. Using that , since p is constant, together with (17) and (19), we obtainBy integration of (20), we obtain . That is, is bounded. Since , it follows that is bounded. Using the BIBO stability property of system (8) due to the choice of F, it follows that W is bounded whenever are bounded. Then, e is bounded. By integration of (20), we also conclude that has bounded -integral. Thus, converges to zero ([28], Proposition 1).Using expression (15) and redefining , we have also proved that if a bounded perturbation with bounded quadratic fractional integral, is added to the model input and/or output, all the above claims remain true.
- (ii)
- If the spectral measure of u is not concentrated on points, is a persistently exciting (PE) function ([28], Property 11). Using this and the fact that converges to zero, it follows that converges to zero ([24], Section 3) i.e., converges to p. Since are bounded, is bounded for . Therefore, using (18), converges to zero.
5. Discussion
5.1. Non-Conmensurate Systems
5.2. Adaptive Observer for Unstable Plants or Non-Caputo Systems
5.3. A Non-Local Observer for a Local System?
5.4. Unknown Initial Time
5.5. Non-Linear Systems
5.6. Other Assumptions
6. Application
Simulation Example
Author Contributions
Funding
Conflicts of Interest
References
- Luenberger, D.G. Observers for multivariable systems. IEEE Trans. Autom. Control 1966, AC-11, 190–197. [Google Scholar] [CrossRef]
- Matignon, D.; D’Andrea-Novel, B. Some results on controllability and observability of finite-dimensional fractional differential systems. Comput. Eng. Syst. Appl. 1996, 2, 952–956. [Google Scholar]
- Dadras, S.; Momeni, H.A. New Fractional Order Observer Design for Fractional Order Nonlinear Systems. In Proceedings of the ASME 2011 International Design Engineering Technical Conferences and Computers and Information, Washington, DC, USA, 28–31 August 2011; pp. 403–408. [Google Scholar] [CrossRef]
- Sastry, S.; Bodson, M. Adaptive Control: Stability, Convergence and Robustness; Prentice Hall: Upper Saddle River, NJ, USA, 1994; ISBN 0-13-004326-5. [Google Scholar]
- Narendra, K.S.; Annaswamy, A.M. Stable Adaptive Systems; Dover Publications: New York, NY, USA, 2005; ISBN 0-486-44226-8. [Google Scholar]
- Pacheco-Oñate, C.; Duarte-Mermoud, M.A.; Aguila-Camacho, N.; Castro-Linares, R. Fractional-order state observers for integer-order linear systems. J. Appl. Nonlinear Dyn. 2017, 6, 251–264. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006; ISBN 0-444-51832-0. [Google Scholar]
- Li, C.; Wang, J. Robust adaptive observer for fractional order nonlinear systems: An LMI approach. In Proceedings of the 53rd Annual Conference on Decision and Control (CDC 2014), Los Angeles, CA, USA, 15–17 December 2014; pp. 392–397. [Google Scholar]
- Wei, Y.; Sun, Z.; Hu, Y.; Wang, Y. On fractional order adaptive observer. Int. J. Autom. Comput. 2015, 12, 664–670. [Google Scholar] [CrossRef]
- Yu, W.; Li, Y.; Wen, G.; Yu, X.; Cao, J. Observer Design for Tracking Consensus in Second-Order Multi-Agent Systems: Fractional Order Less Than Two. IEEE Trans. Autom. Control 2017, 62, 894–900. [Google Scholar] [CrossRef]
- Sabatier, J.; Farges, C.; Merveillaut, M.; Fenetau, L. On observability and pseudo state estimation of fractional order systems. Eur. J. Control 2012, 18, 260–271. [Google Scholar] [CrossRef]
- Wei, X.; Liu, D.Y.; Boutat, D. Nonasymptotic Pseudo-State Estimation for a Class of Fractional Order Linear Systems. IEEE Trans. Autom. Control 2017, 62, 1150–1164. [Google Scholar] [CrossRef]
- Takamatsu, T.; Ohmori, H. State and parameter estimation of lithium-ion battery by Kreisselmeier-type adaptive observer for fractional calculus system. In Proceedings of the 54th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE 2015), Hangzhou, China, 28–30 July 2015; pp. 86–90. [Google Scholar]
- Rapaic, M.; Pisano, A. Variable-Order Fractional Operators for Adaptive Order and Parameter Estimation. IEEE Trans. Autom. Control 2014, 59, 798–803. [Google Scholar] [CrossRef]
- Gallegos, J.A.; Duarte-Mermoud, M.A. On the Lyapunov theory for fractional system. Appl. Math. Comput. 2016, 287, 161–170. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999; ISBN 0-12-558840-2. [Google Scholar]
- Caponetto, R.; Dongola, G.; Fortuna, L.; Petras, I. Fractional Order Systems: Modeling and Control Applications; World Scientific: Singapore, 2010; ISBN 978-981-4465-15-1. [Google Scholar]
- Concepción, A.M.; Chen, Y.Q.; Vinagre, B.M.; Xue, D.; Feliu-Batlle, V. Fractional-Order Systems and Controls: Fundamentals and Applications; Springer: Berlin, Germany, 2010; ISBN 978-1-84996-335-0. [Google Scholar]
- Xue, W.; Gao, Z. On the augmentation of Luenberger Observer-based state feedback design for better robustness and disturbance rejection. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 3937–3943. [Google Scholar]
- Oya, H.; Hagino, K. Observer-based robust control giving consideration to transient behavior for linear systems with structured uncertainties. Int. J. Control 2002, 75, 1231–1240. [Google Scholar] [CrossRef]
- Lan, Y.H.; Huang, H.X.; Zhou, Y. Observer-based robust control of a (1 ≤ a < 2) fractional-order uncertain systems: A linear matrix inequality approach. IET Control Theory Appl. 2012, 6, 229–234. [Google Scholar] [CrossRef]
- Bonnet, C.; Partington, J.R. Coprime factorizations and stability of fractional differential systems. Syst. Control Lett. 2000, 41, 167–174. [Google Scholar] [CrossRef]
- Malti, R. A note on Lp-norms of fractional systems. Automatica 2013, 49, 2923–2927. [Google Scholar] [CrossRef]
- Gallegos, J.A.; Duarte-Mermoud, M.A. Robustness and convergence of fractional systems and their applications to adaptive systems. Fract. Calc. Appl. Anal. 2017, 20, 895–913. [Google Scholar] [CrossRef]
- Tuan, H.; Trinh, H. Stability of fractional-order nonlinear systems by Lyapunov direct method. arXiv 2018, arXiv:1712.02921v1. [Google Scholar]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov Functions for Fractional Order Systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Duarte-Mermoud, M.A.; Aguila-Camacho, N.; Gallegos, J.A.; Castro-Linares, R. Using General Quadratic Lyapunov Functions to Prove Lyapunov Uniform Stability for Fractional Order Systems. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 650–659. [Google Scholar] [CrossRef]
- Gallegos, J.A.; Duarte-Mermoud, M.A. Convergence of fractional adaptive systems using gradient approach. ISA Trans. 2017, 69, 31–42. [Google Scholar] [CrossRef] [PubMed]
- Bai, E.; Sastry, S. Global stability proofs for continuous-time indirect adaptive control schemes. IEEE Trans. Autom. Control 1987, 32, 537–543. [Google Scholar] [CrossRef]
- Ortigueira, M.D. On the initial conditions in continuous-time fractional linear systems. Signal Process. 2003, 83, 2301–2309. [Google Scholar] [CrossRef]
- Sabatier, J.; Merveillaut, R.; Malti, R.; Oustaloup, A. How to impose physically coherent initial conditions to a fractional system? Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 1318–1326. [Google Scholar] [CrossRef]
- Gallegos, J.; Duarte-Mermoud, M.A.; Aguila-Camacho, N.; Castro-Linares, R. On fractional extensions of Barbalat Lemma. Syst. Control Lett. 2015, 84, 7–12. [Google Scholar] [CrossRef]
- Kreisselmeier, G. Adaptive observers with exponential rate of convergence. IEEE Trans. Autom. Control 1977, 22, 2–8. [Google Scholar] [CrossRef]
- Gallegos, J.A.; Duarte-Mermoud, M.A. Robust backstepping control of mixed-order nonlinear systems. IET Control Theory Appl. 2018, 12, 1276–1285. [Google Scholar] [CrossRef]
- Hammouri, H.; Kinnaert, M.; El Yaagoubi, E.H. Observer-based approach to fault detection and isolation for nonlinear systems. IEEE Trans. Autom. Control 1999, 44, 1879–1884. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| β = 0.7 | β = 0.9 | β = 1 | β = 1.1 | β = 1.3 | |
|---|---|---|---|---|---|
| β = 0.7 | β = 0.9 | β = 1 | β = 1.1 | β = 1.3 | |
|---|---|---|---|---|---|
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duarte-Mermoud, M.A.; Gallegos, J.A.; Aguila-Camacho, N.; Castro-Linares, R. Mixed Order Fractional Observers for Minimal Realizations of Linear Time-Invariant Systems. Algorithms 2018, 11, 136. https://doi.org/10.3390/a11090136
Duarte-Mermoud MA, Gallegos JA, Aguila-Camacho N, Castro-Linares R. Mixed Order Fractional Observers for Minimal Realizations of Linear Time-Invariant Systems. Algorithms. 2018; 11(9):136. https://doi.org/10.3390/a11090136
Chicago/Turabian StyleDuarte-Mermoud, Manuel A., Javier A. Gallegos, Norelys Aguila-Camacho, and Rafael Castro-Linares. 2018. "Mixed Order Fractional Observers for Minimal Realizations of Linear Time-Invariant Systems" Algorithms 11, no. 9: 136. https://doi.org/10.3390/a11090136
APA StyleDuarte-Mermoud, M. A., Gallegos, J. A., Aguila-Camacho, N., & Castro-Linares, R. (2018). Mixed Order Fractional Observers for Minimal Realizations of Linear Time-Invariant Systems. Algorithms, 11(9), 136. https://doi.org/10.3390/a11090136