During modeling, contact pairs have been defined between layers in the ANSYS APDL model. The contact interface between the steel plates and the damping layer in Region C is defined as bonded (always) contact to simulate the vulcanized adhesion observed in real-world applications. For the internal regions of the damping layer, bonded (always) contact is applied, ensuring that the damping layer is treated as a unified structure during the analysis. To simulate the dynamic contact state of the rubber components, rough contact pairs were established at the interfaces of the A regions between the upper and lower damping layers. Considering the stick–slip friction behavior observed at the contact surface between the two rubber blocks, the friction coefficient between the A regions of the two damping layers is set to 0.2.
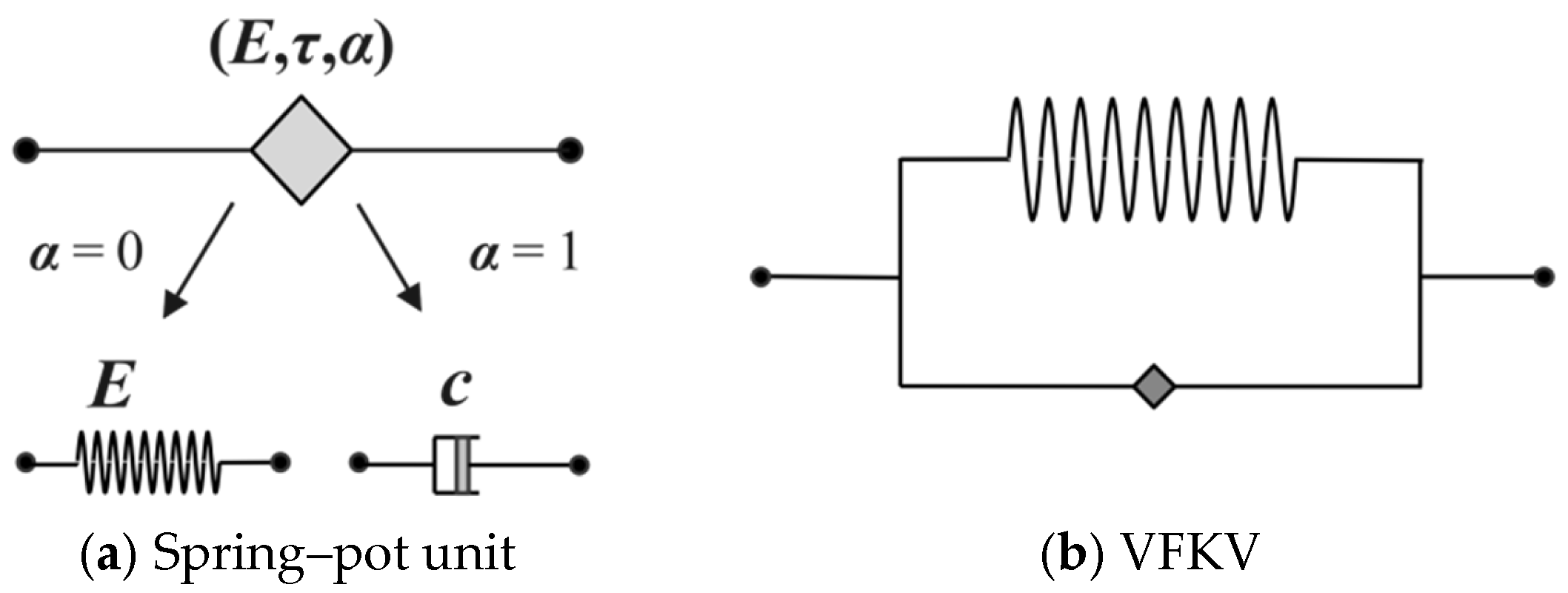
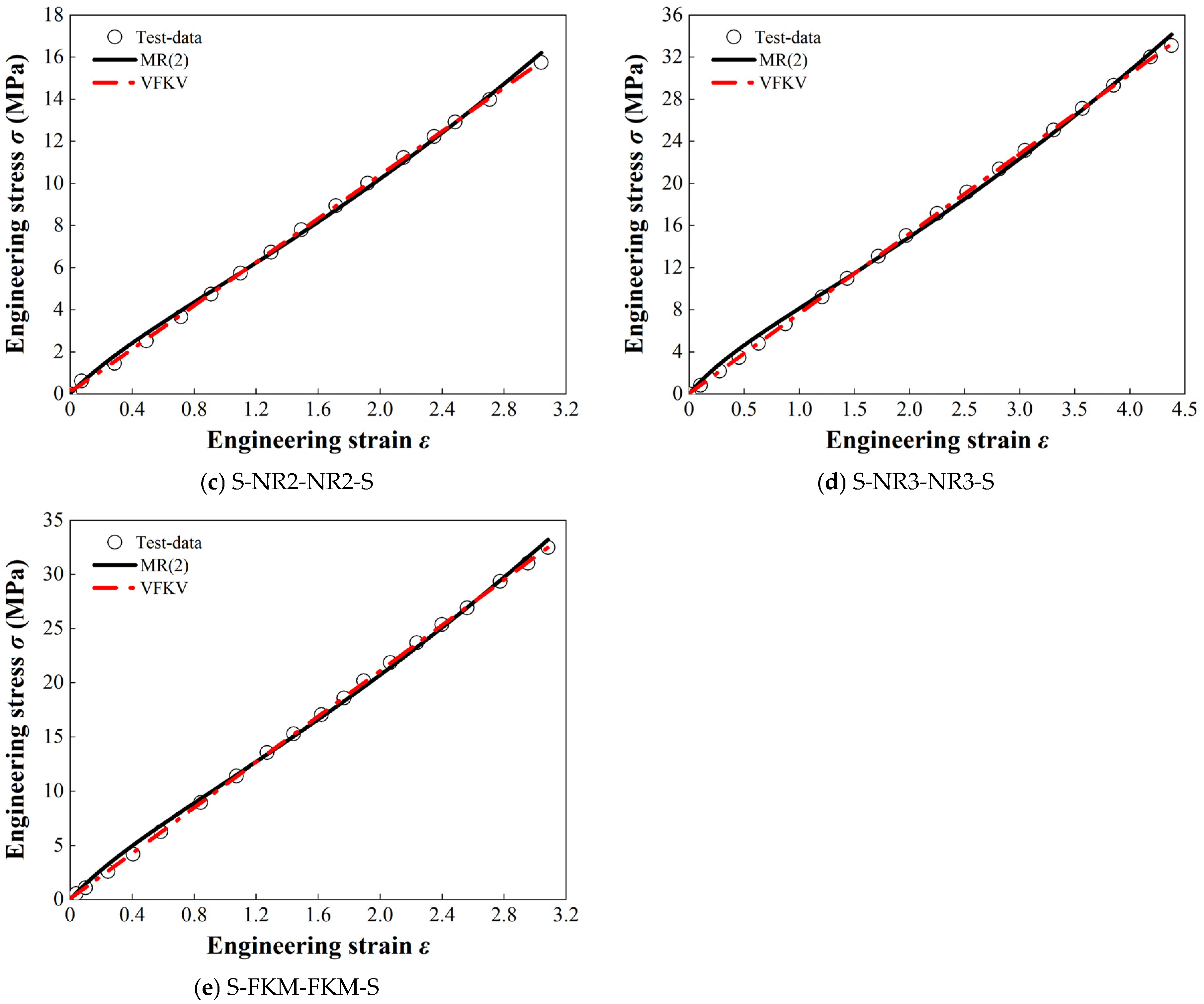
While the MR model is commonly used for hyperelastic materials due to its ability to capture static and quasi-static behavior, it has limitations in accurately modeling the dynamic performance of damping rubber under high-frequency loading. Comparative analyses have demonstrated that the VFKV model offers superior fitting accuracy for dynamic properties, particularly in capturing the frequency-dependent damping characteristics of rubber. However, the current study utilized a combination of the Prony series and the MR model because the VFKV model has not yet been fully implemented in the simulation software used. This combined approach was chosen as a practical compromise to incorporate both the hyperelastic behavior described by the MR model and the viscoelastic time-dependent characteristics captured by the Prony series, ensuring a more comprehensive representation of the material’s behavior under static and dynamic loading conditions.
We recognize the potential benefits of using the VFKV model for improved dynamic fitting and plan to implement it in future studies through secondary software development. The decision to use the combined MR and Prony series model in this study reflects the current computational constraints and the need to balance accuracy with practicality. This approach effectively captures the key dynamic and nonlinear characteristics of the damping layer while maintaining compatibility with existing simulation tools. By laying the groundwork with this hybrid model, we aim to refine the methodology further once the VFKV model is successfully integrated into the simulation framework.
3.1. Static Analysis
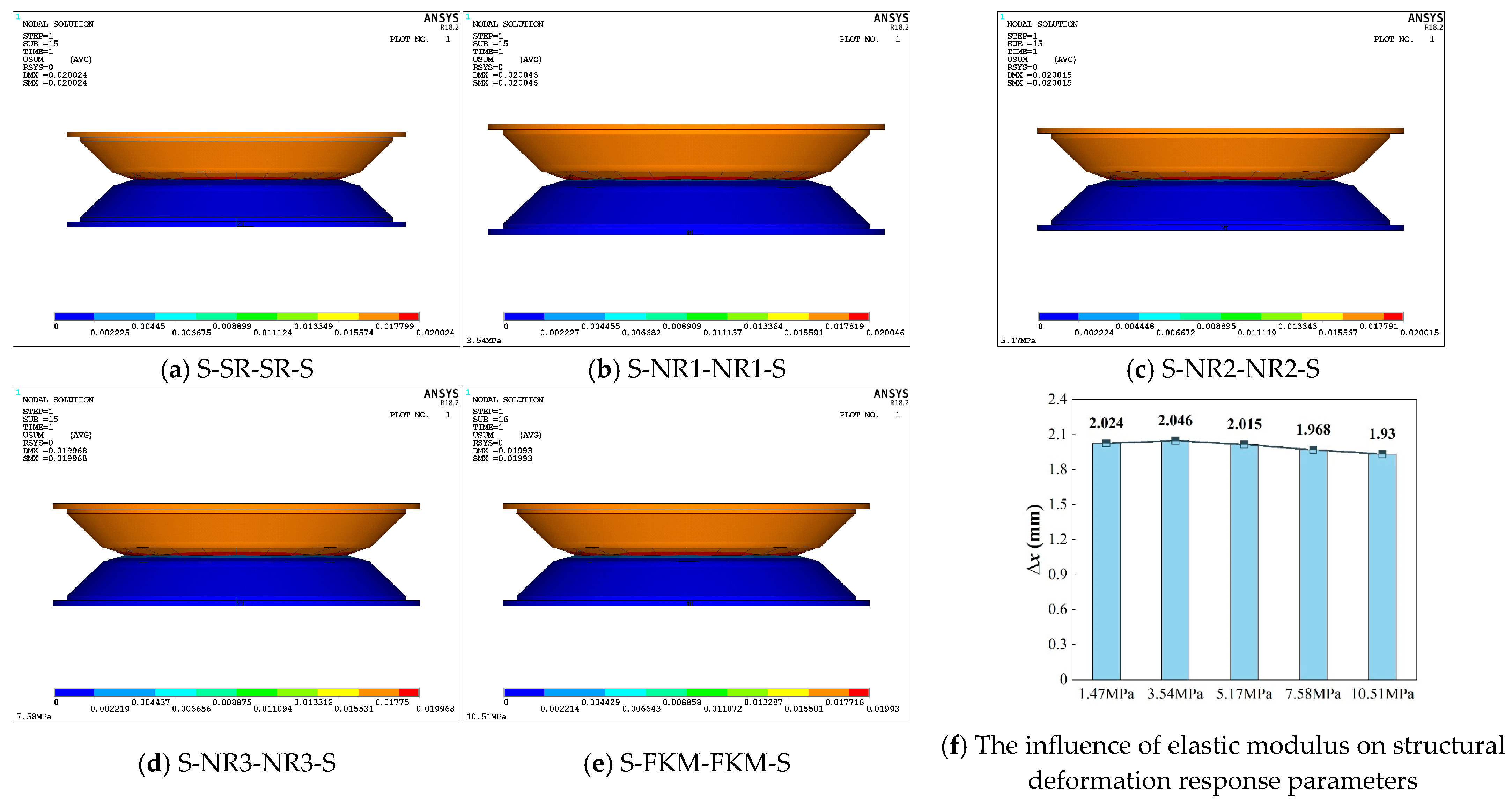
The static compression displacement contour plots of the five structures are shown in
Figure 9, illustrating the deformation at the final loading sub-step for each structure. It can be observed that no element failure occurred in any of the structures, and all the maximum displacement values exceeded the applied loading amplitudes, a finding which can primarily be attributed to the nonlinear large-deformation effects of the damping-layer rubber. Among them, the S-NR1-NR1-S structure (
Figure 9b, with
E2 = 3.54 MPa) exhibited the largest deformation displacement, of 20.046 mm, followed by the S-SR-SR-S structure (
Figure 9a, with
E2 = 1.47 MPa) at 20.024 mm. The S-NR2-NR2-S and S-NR3-NR3-S structures showed displacements of 20.015 mm and 19.968 mm, respectively, while the S-FKM-FKM-S structure (
Figure 9e, with
E2 = 10.51 MPa) had the smallest displacement, only 19.93 mm.
A comparative analysis of these five viscoelastic damping structures reveals that as the elastic modulus of the damping layer increases, the maximum displacement first increases and then decreases. Using ∆
x (the difference between the maximum deformation displacement and the applied displacement) as the evaluation index,
Figure 9f shows that the horizontal axis represents the damping layers with varying elastic moduli, while the vertical axis represents ∆
x. From this, it can be seen that when
E2 = 3.54 MPa, ∆
x reaches its peak, equivalent to 11.3% of the applied displacement, indicating that this material tends to experience larger nonlinear deformation losses.
Overall, under static excitation, all five structures are within the normal rubber deformation range. To further investigate the stability of each design and the effect of the damping layer’s elastic modulus on the performance of the viscoelastic suspension, a deeper analysis involving parameters such as stress, strain, and strain rate is needed.
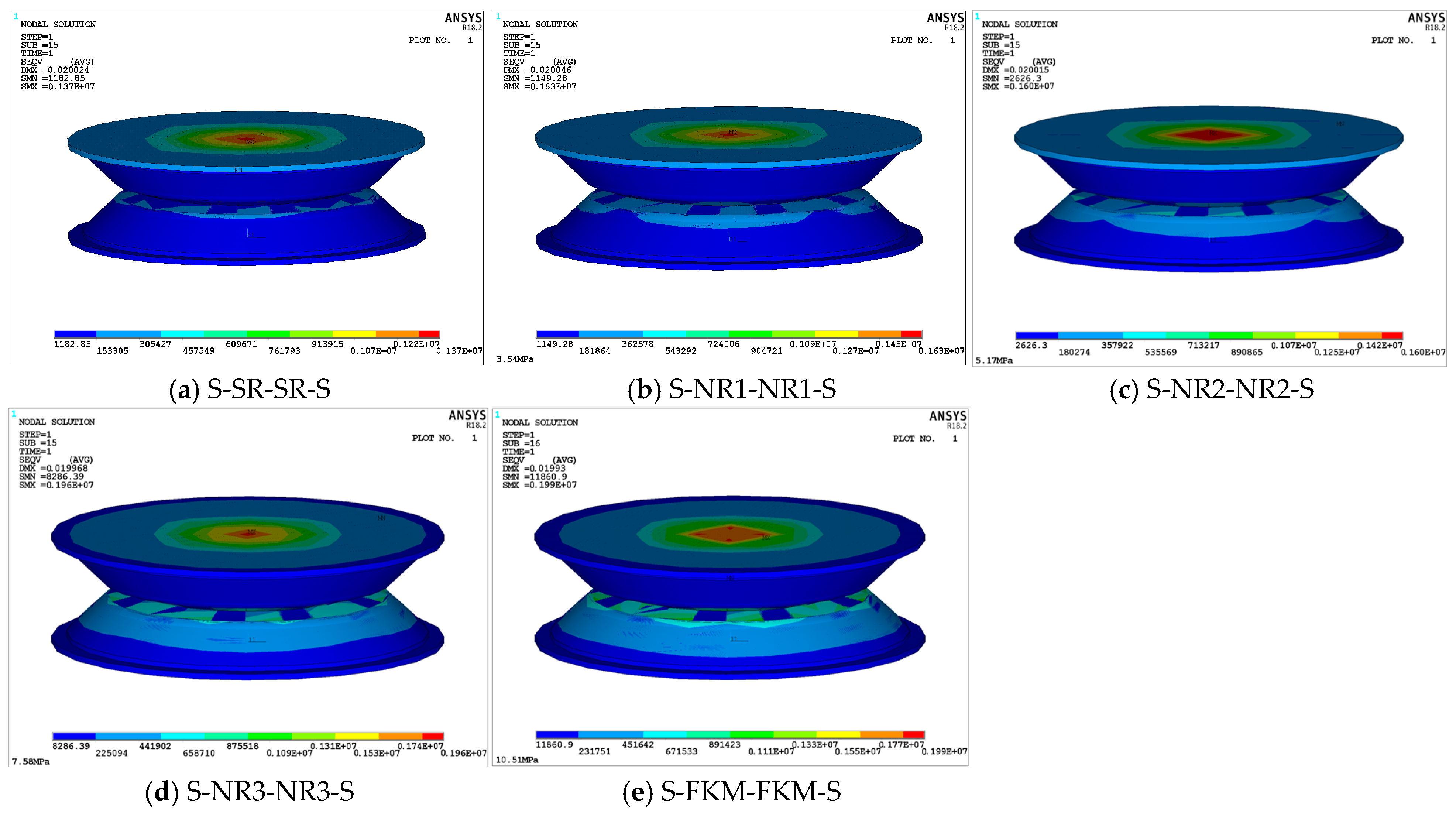
Figure 10 shows the maximum equivalent stress contour plots for the five viscoelastic damping structures. It can be observed that the maximum stress points in all structures occur at the center of the supporting steel plate 2-2-1 in the upper damping structure. Among them, the S-NR2-NR2-S structure (
Figure 10c) exhibits the largest stress concentration area. In the horizontal direction, the stress gradually decreases from the center to the boundary along the radius, while in the vertical direction, the stress decreases along the concentric axis. Notably, when the elastic modulus of the damping layer exceeds 7.58 MPa (
Figure 10d,e), the rate of stress expansion decreases, and the stress concentration area in the central region becomes smaller compared to the first three structures. However, the stress values in these regions are significantly larger than those in the other three structures. For example, the minimum stress for the structures with damping-layer elastic moduli of
E2 = 7.58 MPa and
E2 = 10.51 MPa are 3.15 times and 4.51 times greater, respectively, than the minimum stress for the
E2 = 5.17 MPa structure.
Moreover, by examining the contour plots of the lower damping layer 2-2-3 in
Figure 10a–e and analyzing the corresponding data, it can be observed that as the elastic modulus of the damping layer increases, the stress transfer between the layers becomes more pronounced. The loading stress gradually increases, and the force transfer from the upper damping structure to the lower damping structure becomes more significant. In
Figure 10a, the S-SR-SR-S structure shows the lowest maximum equivalent stress value, 1.37 MPa, while in
Figure 10e, the S-FKM-FKM-S structure exhibits the highest value, 1.99 MPa. The maximum equivalent stress values for the S-NR1-NR1-S and S-NR2-NR2-S structures in
Figure 10b,c are 1.63 MPa and 1.60 MPa, respectively, with only a slight difference between them. The five structures are ranked by maximum equivalent stress as follows: 10.51 MPa > 7.58 MPa > 5.17 MPa ≈ 3.54 MPa > 1.47 MPa. A comparative analysis reveals that as the elastic modulus of the damping layer increases, the maximum stress initially increases, then decreases, and then increases again, although the magnitude of decrease is relatively small. Overall, higher elastic moduli enhance the maximum equivalent stress of the structure, accelerate load transfer between the layers, and increase the load-bearing capacity.
To ensure the stability of the viscoelastic damping structure, it is essential to obtain the unit strain energy density contour plots, which help to identify high-strain regions and assess whether the maximum strain energy density falls within the allowable limits, thus preventing permanent damage to the rubber and failure of the structure.
Figure 11 presents the unit strain energy density contour plots for the five viscoelastic damping structures. The highest strain energy density is concentrated in the contact region of the upper and lower damping layers and increases with the elastic modulus. Additionally, the maximum stored energy at this node follows the same ranking as the elastic moduli of the damping-layer rubber, with the S-FKM-FKM-S structure exhibiting the highest strain energy density and elastic stored energy, while the S-SR-SR-S structure shows the lowest.
Furthermore, since the peak release of unit strain energy density in each structure occurs at the rubber layer, a trapezoidal integration method, combined with the data from the five rubber models, was used to calculate the quasi-static tensile test data, in order to determine the ultimate strain energy density (
Ulimit) for each rubber material. This allows for further assessment of whether the maximum strain energy density values are within the allowable range. The specific comparison values are presented in
Table 5.
As shown in
Table 5, the damping layers of all five structures fall within the allowable range. Among them, the S-NR3-NR3-S structure exhibits a significant difference from the limit range, indicating higher safety and stability. In contrast, the S-NR2-NR2-S structure is closest to the limit strain energy density value. If this viscoelastic damping structure is chosen, optimization of its structural layout and material parameters would be necessary to ensure its performance.
The viscoelastic damping structure adopts a stacked layered design, relying on the compression and friction between the upper and lower damping-layer rubber materials to convert mechanical energy into thermal energy for vibration damping. Therefore, after ensuring that the maximum unit strain energy density meets the allowable requirements, it is also necessary to consider the force transfer path, especially the force transmission between the contact surfaces.
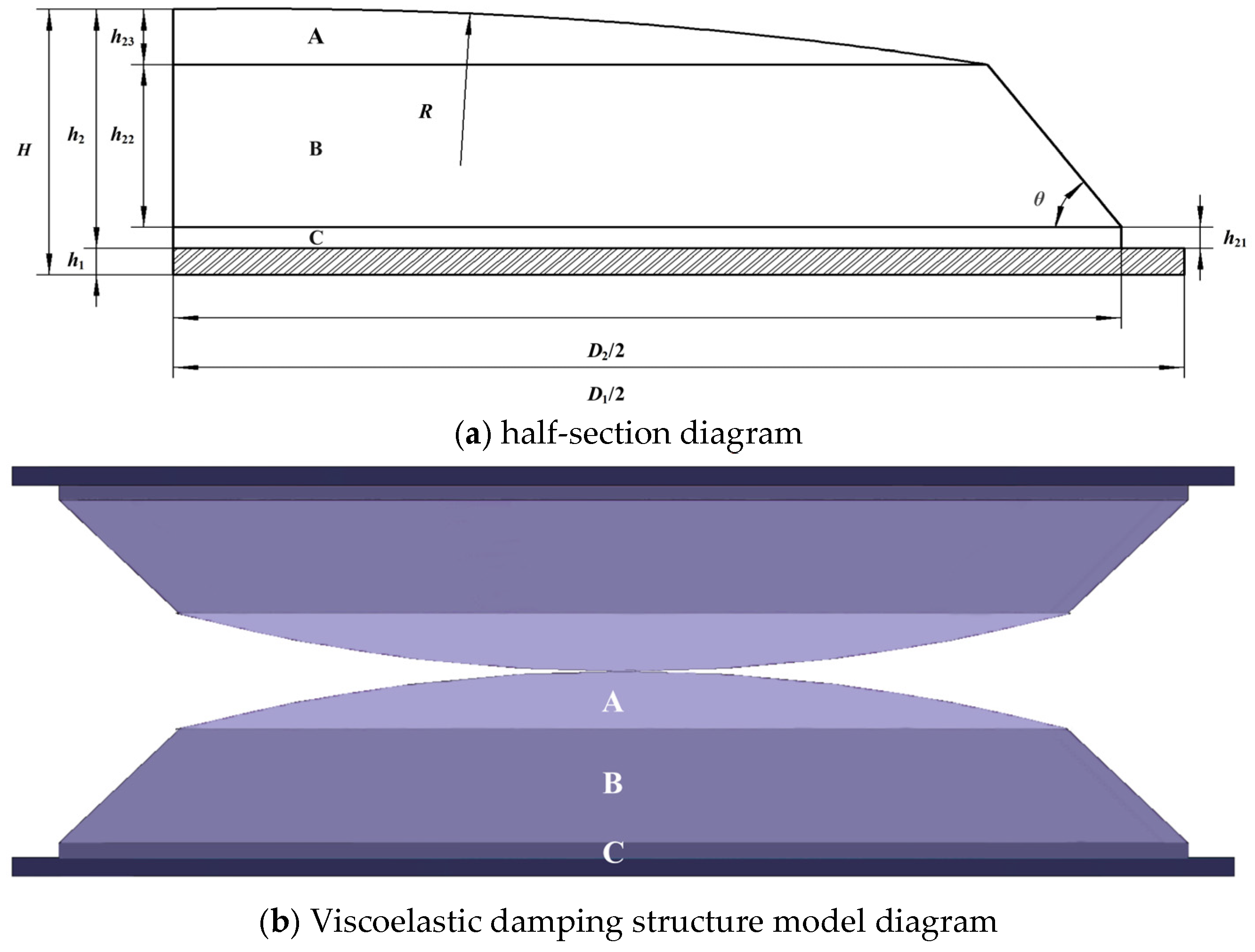
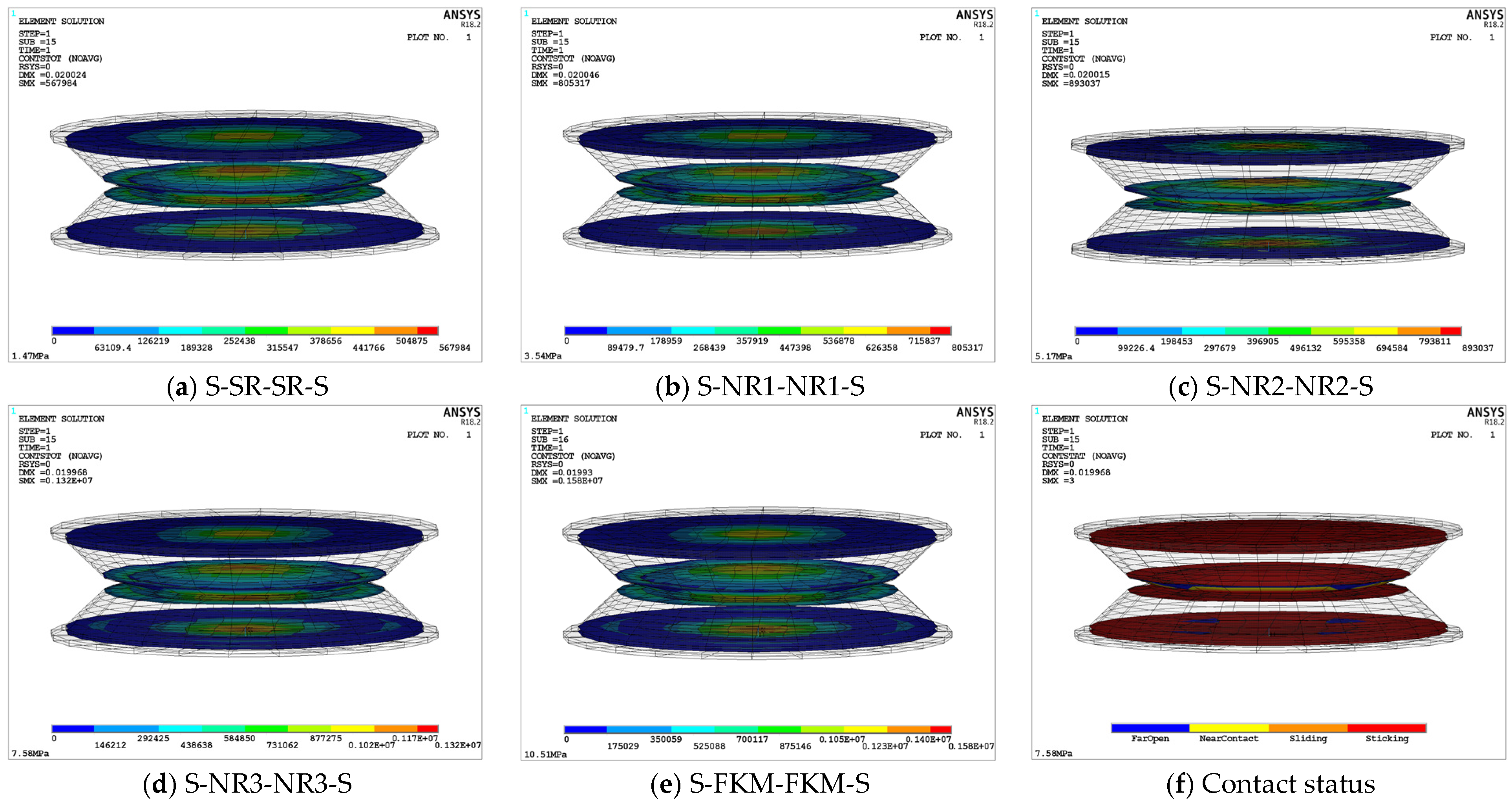
Figure 12 illustrates the stress distribution on the interlayer bonding and contact surfaces of the five viscoelastic damping structures. It can be observed that the maximum stress values of all structures occur in the central region of each layer, and the overall maximum stress values of each structure are located at the contact interface between the upper and lower damping layers. This is due to the overall design of the structure, in which the A zone of the damping layers is dome-shaped. When the upper and lower damping structures collide, the A zones of the two damping layers come into contact first, compressing each other, and the force is then transmitted bidirectionally to the B and C zones and the supporting steel plate. This transmission involves mechanical waves, including both reflected and transmitted waves.
As shown in
Figure 12, the maximum total contact stress of the five viscoelastic damping structures increases with the elasticity modulus of the damping layer. The sequence of increasing stress is as follows: S-FKM-FKM-S > S-NR3-NR3-S > S-NR2-NR2-S > S-NR1-NR1-S > S-SR-SR-S. Specifically, the maximum total contact stress of S-FKM-FKM-S is 1.58 MPa, while the maximum contact stress of S-SR-SR-S is 0.5679 MPa, a difference of 2.78-fold. This is because the higher the elasticity modulus of the damping-layer rubber, the greater its hardness and stiffness, which in turn increases the contact stress.
Figure 12f shows the contact state of the S-FKM-FKM-S structure, in which the overall contact surface between the supporting steel plate and the damping layer, as well as the contact center between the upper and lower damping layers, is in an adhesive state with no relative sliding.
Comparing the deformation displacement, stress, strain energy density, and contact stress data of various damping structures reveals a positive correlation between the elasticity modulus of the damping-layer rubber and the overall static mechanical performance parameters of the structure. Specifically, as the elasticity modulus increases, the values of the mechanical parameters also increase. However, excessively high mechanical parameters may increase the structure’s stiffness, thereby affecting the energy dissipation capacity. Thus, the elasticity modulus of the damping layer needs to be carefully selected. A detailed local analysis was performed to explore the performance of the upper and lower damping layers and their impact on the damping characteristics. From the overall perspective, the mechanical deformation cloud maps of all of the structures exhibit common characteristics. Therefore, after evaluating the maximum values of various parameters, the S-NR3-NR3-S structure with an elasticity modulus of 7.58 MPa is chosen as a representative example to demonstrate its static performance.
Figure 13 illustrates the static performance changes of the upper damping structure of S-NR3-NR3-S.
Figure 13a shows the displacement deformation cloud map of the structure, in which the maximum deformation displacement occurs at the edge of the upper damping layer A zone, with a value of 19.968 mm, resulting in a displacement difference of 1.968 mm compared to the loading displacement response. This is due to the dome-shaped design, which causes mutual compression between the middle dome regions of both layers.
Figure 13b presents the equivalent stress cloud map, in which the central stress on the A zone contact surface is 0.875518 MPa, significantly lower than the maximum equivalent stress at supporting steel plate 2-2-1.
Figure 13c displays the equivalent strain cloud map, showing a smaller maximum value concentrated in the inner region. The strain values at the A zone contact surface, distributed along the circumferential direction at 90 degrees, remain within a middle range and fluctuate within the allowable limits. Finally,
Figure 13d depicts the elastic strain energy density cloud map, with high energy density primarily concentrated at the center of the A zone, where the maximum value reaches 108,741 J/m
3. This value meets the
Ulimit of NR3 and complies with the usage requirements.
Figure 14 presents the changes in static performance parameters of the lower damping structure (LDS) of the S-NR3-NR3-S.
Figure 14a shows the displacement deformation contour of the LDS. It can be observed that the maximum deformation displacement occurs at the center unit of the A zone in 2-2-3, with a value of 9.08 mm, which is approximately half of the applied displacement. This region occupies a small proportion, and the overall displacement deformation of the LDS occurs mainly in the A and B zones of 2-2-3. The displacement changes gradually in a stepwise fashion from top to bottom, with the A zone contact surface at the top (refer to the legend in
Figure 14a). The displacement deformation values for the C zone and the lower supporting steel plate (2-2-4) are zero.
Figure 14b presents the equivalent stress contour of the LDS. Compared to the equivalent stress in the upper damping structure (UDS), the maximum equivalent stress in 2-2-3 is smaller, with a difference of 0.42 MPa. However, the distribution trend of equivalent stress in both structures is similar and follows the same order.
Figure 14c presents the equivalent strain contour of the LDS. Similar to the UDS, the maximum equivalent strain occurs within the damping layer. The maximum equivalent strain on the contact surface of the A zone is located at the edge, distributed around 90 degrees circumferentially. Lastly,
Figure 14d presents the elastic strain energy density contour of the LDS. The maximum strain energy density is located at the center node of the A zone in the 2-2-3, with a value of 109,814 J/m
3. This is slightly larger than the corresponding value in the 2-2-2, but still much lower than the
Ulimit for NR3, meeting the requirements for maximum compression displacement operating conditions.
By analyzing the static performance parameters of the upper and lower damping structures in the S-NR3-NR3-S configuration, it can be observed that the mechanical performance parameters of each layer are incorporated within the overall structure. Moreover, the effective contact area of the upper and lower damping layers is approximately equal to the diameter of the overlapping surface between the B and A zones. A comparison with other structures indicates that the structural performance remains within the allowable safety range. Once the consistency between the upper and lower damping layers and the overall structure’s basic mechanical performance was confirmed, the force and displacement transmission data from the top and bottom layers of each structure were further extracted (as shown in
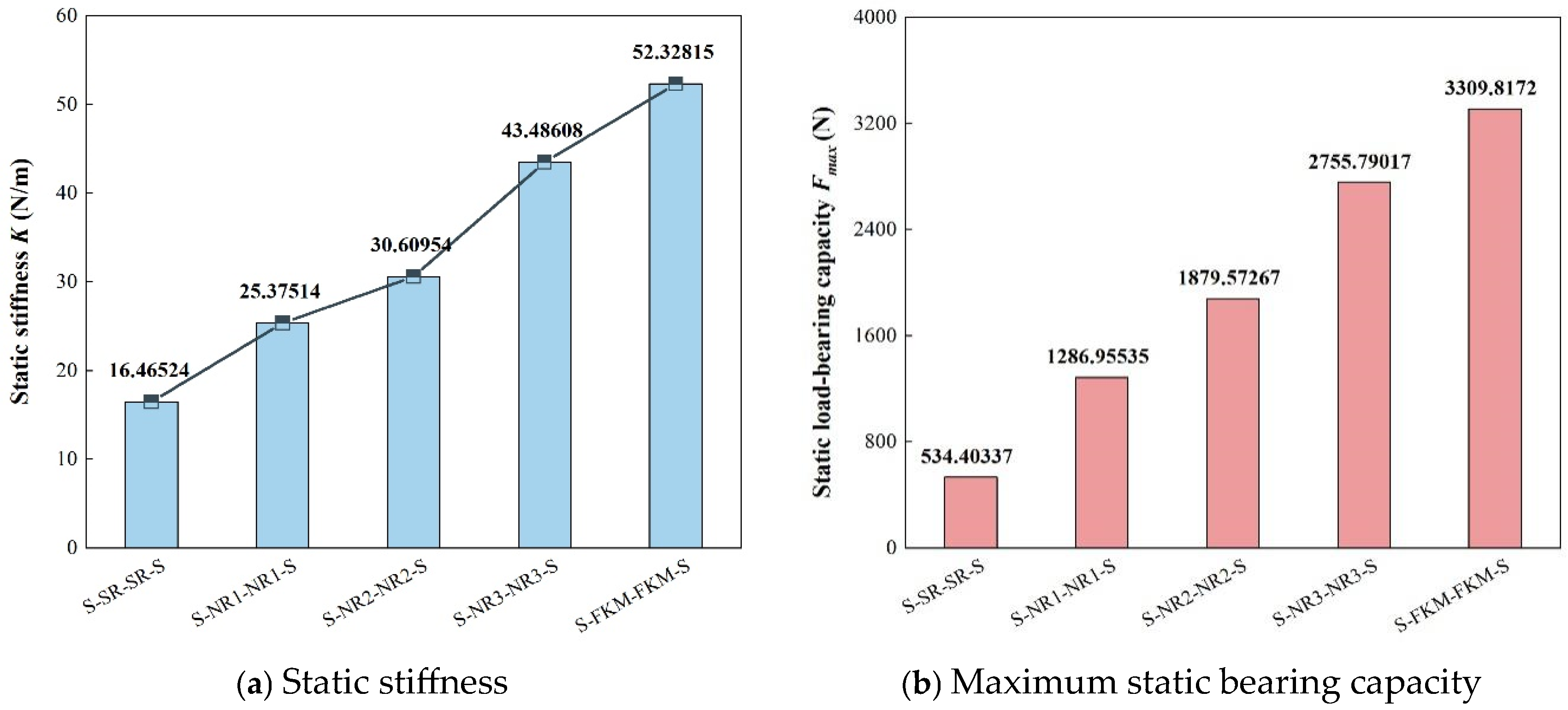
Table 6). This data was then used to investigate the force and displacement transmission rates of the damping layers, ultimately resulting in calculations of the static stiffness and static load-bearing capacity of each structure.
Table 6 presents the force and displacement amplitudes at the input and output ends of each viscoelastic damping structure. As the elastic modulus of the damping layer increases, the force transmission rate of each structure significantly increases. Among them, the force transmission rates of the S-NR3-NR3-S and S-FKM-FKM-S structures are 13.17% and 13.49%, respectively, which are notably higher than those of S-NR2-NR2-S (11.08%) and S-NR1-NR1-S (7%). The S-SR-SR-S structure is close to 0, almost achieving rigid transmission. In addition, both the load amplitude and static stiffness increase in parallel, and their ranking is consistent with the elastic modulus of the damping layer, with the highest being S-FKM-FKM-S and the lowest being S-SR-SR-S. When comparing the maximum stress and strain at the input and output ends of each structure, it is evident that both increase with the increase in the damping layer’s elastic modulus. However, the strain values are relatively small, and the effect on the deformation of the damping layer can be considered negligible.
When evaluating the static load-bearing capacity of the structure, it is necessary to consider not only the overall load-bearing capacity but also the capacity range of the upper and lower damping layers. Based on the compressive strengths of the five types of rubber, the maximum static load-bearing capacity for each can be determined (see
Figure 15b). The results show that this ranking is consistent with the elastic modulus of the damping layer: the greater the modulus, the higher the maximum static load-bearing capacity. When the elastic modulus of the damping layer is between 3.54 MPa and 7.58 MPa, the static stiffness and load-bearing capacity change significantly. When
E2 ≤ 5.17 MPa and
E2 = 7.58 MPa, their performance improves significantly. However, when
E2 exceeds 7.58 MPa, the increase becomes slow, although its reliability still outperforms other structures.
Therefore, after a comprehensive comparison of the static performance parameters of the five VDSs, the S-NR3-NR3-S structure, with E2 = 7.58 MPa, shows the best static performance. To confirm this conclusion, further dynamic analysis will be conducted to observe its dynamic performance.
3.3. Dynamic Characteristics of the Structure
As discussed in
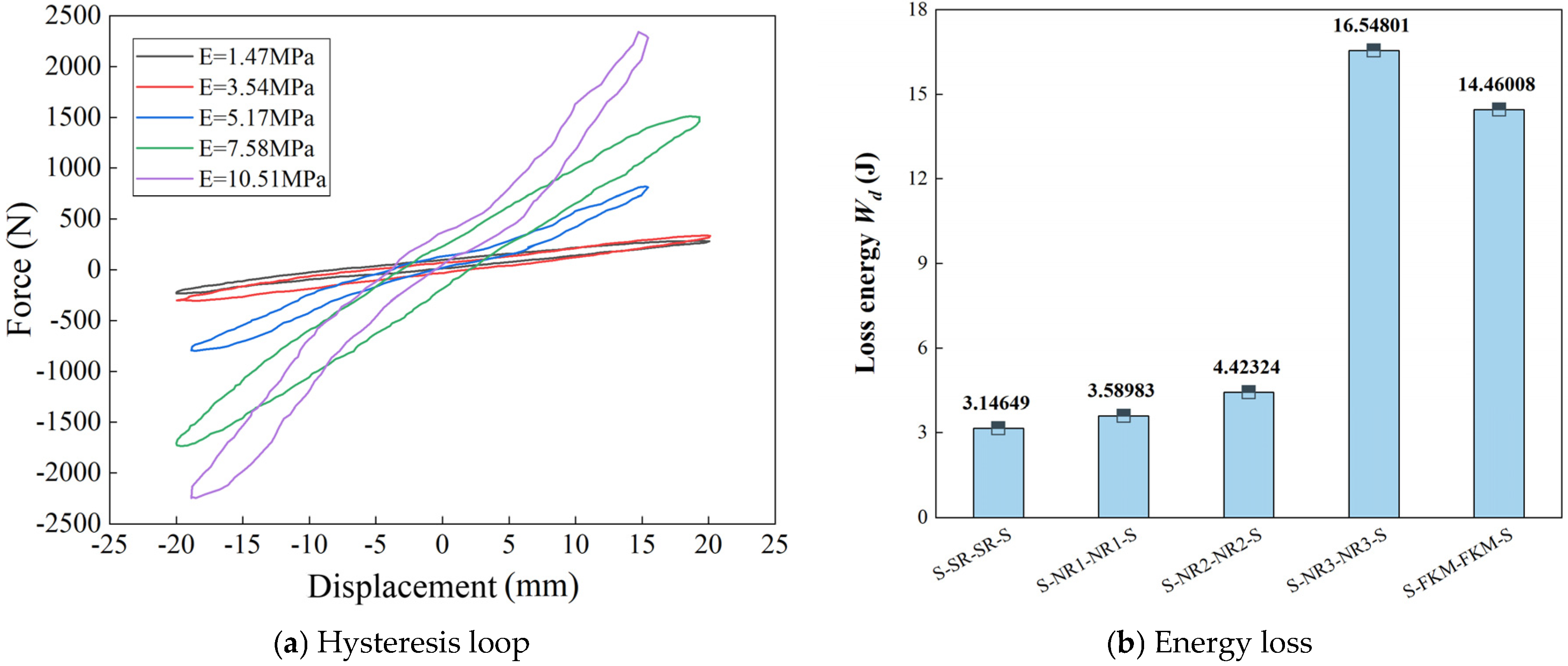
Section 2.3, the force–displacement hysteresis loop of the viscoelastic suspension structure characterizes its dynamic vibration-damping performance. The loop enables the determination of the structure’s dynamic load capacity, stiffness, and damping properties. To further investigate the dynamic characteristics of the viscoelastic suspension structure, harmonic transient dynamic loading was performed for the S-NR3-NR3-S structure under different alternating frequencies (3–8 Hz, the main frequency range of crawler bulldozers) and compression amplitudes. Both finite-element simulations and experimental validations were employed to evaluate the dynamic response of the structure.
In the APDL simulation, the maximum compression displacement (20% of the total structural thickness) was used as the initial displacement amplitude, and harmonic excitation was applied to the suspension structure. The damping layer was modeled using a hyper-viscoelastic constitutive model. The boundary conditions mirrored those used in static analysis, with the lower supporting steel plate fully constrained along its perimeter, the upper supporting steel plate constrained in the X-direction, and sinusoidal displacement loads applied along the Z-direction. As shown in
Figure 17a, the simulated hysteresis loop responses at 2 Hz and 4 Hz indicate that the loop area decreases as the excitation frequency increases, reflecting a reduction in energy dissipation capacity. At 2 Hz, the hysteresis loop area is the largest, demonstrating the strongest energy dissipation, whereas at 4 Hz, the loop area and energy dissipation significantly decrease. The energy dissipation ratio between 2 Hz and 4 Hz is approximately 1.64 (see
Table 7).
To validate the simulation results, the dynamic mechanical responses of the S-NR3-NR3-S structure were experimentally tested under low-frequency conditions (2 Hz and 4 Hz) using the WANCE HDT 255A electro-hydraulic servo fatigue testing machine (Wance Equipment Co., Ltd. in Shenzhen, China). The experimental hysteresis loops, shown in
Figure 17a, exhibited significantly larger loop areas compared to the simulation results, indicating stronger energy dissipation and load-bearing capacity under actual working conditions. As summarized in
Table 7, the experimentally measured dynamic properties, including static stiffness, dynamic stiffness, damping coefficients, loss factors, and energy storage capacities, were consistently higher than those obtained from the simulations. Similarly, the dynamic-to-static stiffness ratio, and loss factor errors between the two methods were 9%, and 7.7% at 2 Hz, and 9.5% and 9% at 4 Hz, respectively.
These discrepancies exceeded the typical error range of 15% associated with normal operating conditions [
28,
29], but remained within the allowable range of 20% associated with extreme impact scenarios [
30,
31,
32]. Despite these numerical differences, both simulation and experimental results exhibited consistent dynamic trends: the hysteresis loop area decreased with increasing frequency, reflecting reduced energy dissipation capacity. At 2 Hz, the hysteresis loop area was the largest, demonstrating robust energy dissipation, while the displacement peak values exceeded the initial loading amplitude, highlighting the nonlinear large-deformation behavior of the rubber material under low-frequency conditions.
The observed discrepancies were primarily attributed to several factors. Firstly, the inherent nonlinearity and uncertainty of the rubber material played a significant role. Comparative analyses demonstrated that using only a hyperelastic constitutive model produced results closer to experimental values than the combined hyperelastic and Prony series model. However, the latter provided smoother calculations and better captured the dynamic and nonlinear characteristics of the damping layer, despite some deviations. This underscores the limitations of current built-in models in accurately representing the complex large-deformation behavior of rubber. Secondly, numerical errors and convergence challenges in finite-element simulations, particularly under large deformation and high-frequency loading conditions, also contributed to the differences. While finer mesh resolutions were employed to minimize numerical errors, they often led to early element failure during calculations. Simplifications in geometry and material assumptions further amplified discrepancies, as simulations tended to underestimate forces by oversimplifying a material’s nonlinear and damping effects. Lastly, the contact parameter settings significantly impacted the results. The default bonded contact parameters used in simulations inadequately captured real-world interactions, such as stick–slip friction and contact stiffness, which are critical to energy dissipation at the contact interface. Consequently, the hysteresis loop areas and dynamic responses observed in simulations underestimated the experimental results.
To address these discrepancies and improve simulation accuracy, future research will focus on the following:
- (1)
Optimizing Material Models: Advanced nonlinear constitutive models will be developed using user-defined subroutines (UPFs). These models will incorporate critical characteristics of rubber materials, such as strain hardening, strain softening, and frequency-dependent viscoelastic properties, to enhance the accuracy of simulations under conditions of large deformation.
- (2)
Improvement of Contact Models: Contact parameters, including friction coefficient, contact stiffness, and contact damping, will be refined. Experimental measurements will be conducted to validate the accuracy of contact effects in the model. This approach aims to ensure that the simulation accurately reflects the real-world interaction behavior between different structural components.
- (3)
Optimization of Numerical Methods: Mesh refinement will be improved to increase simulation precision, and advanced numerical integration techniques, along with adaptive time-stepping algorithms, will be adopted to reduce numerical errors in dynamic solutions. Additionally, boundary conditions will be refined to better align with real-world operating conditions, avoiding simplifications in loading paths that could lead to inaccuracies in the simulation results.
Additionally, the static stiffness data in
Table 7 was obtained using the NSS CMT5605 electronic universal testing machine (Shenzhen Sansi Testing Instrument Co., Ltd. in Shenzhen, China), which was used to measure the static mechanical curve of the structure (
Figure 17b). The force–displacement relationship initially exhibits linear elastic behavior. When the compression displacement exceeds 7 mm, the nonlinear effects of the rubber damping layer become dominant. Initially, as the compression displacement increases, the corresponding load grows at a slower rate, reflecting the strain-softening behavior of rubber during deformation. Once the compression displacement reaches or exceeds 15 mm, the load and material strength increase rapidly, indicating the strain-hardening behavior of the rubber.
Furthermore, the static stiffness of the structure can be derived from the mechanical response curve, as shown in
Table 7. Comparing the force–displacement curves from the simulation and the experiment reveals consistent trends, but the static stiffness values differ by 4.878 N/mm. This deviation is considered normal and can be attributed to several factors, such as variations in the vulcanization process of the test specimens. In real-world tests, rubber materials exhibit true nonlinear mechanical behaviors, including strain hardening and strain softening, while the material models used in simulations are relatively simplified, often neglecting local geometric features or material inhomogeneity. Additionally, issues with the precision of mesh generation in the simulation model contribute to the discrepancies, further amplifying the differences compared to real-world conditions.
3.4. Mechanical Properties
From the previous analysis of experimental and simulation-based results, it is evident that both methods exhibit consistent dynamic trends: the hysteresis loop area decreases as the frequency increases, reflecting a reduction in energy dissipation capacity. At the same time, the displacement peak values exceed the loading amplitude, demonstrating the nonlinear large-deformation behavior of rubber materials at low frequencies. However, the experimental results are significantly higher than the simulation results. This discrepancy can primarily be attributed to the limitations of material models, contact parameters, and simulation methodologies.
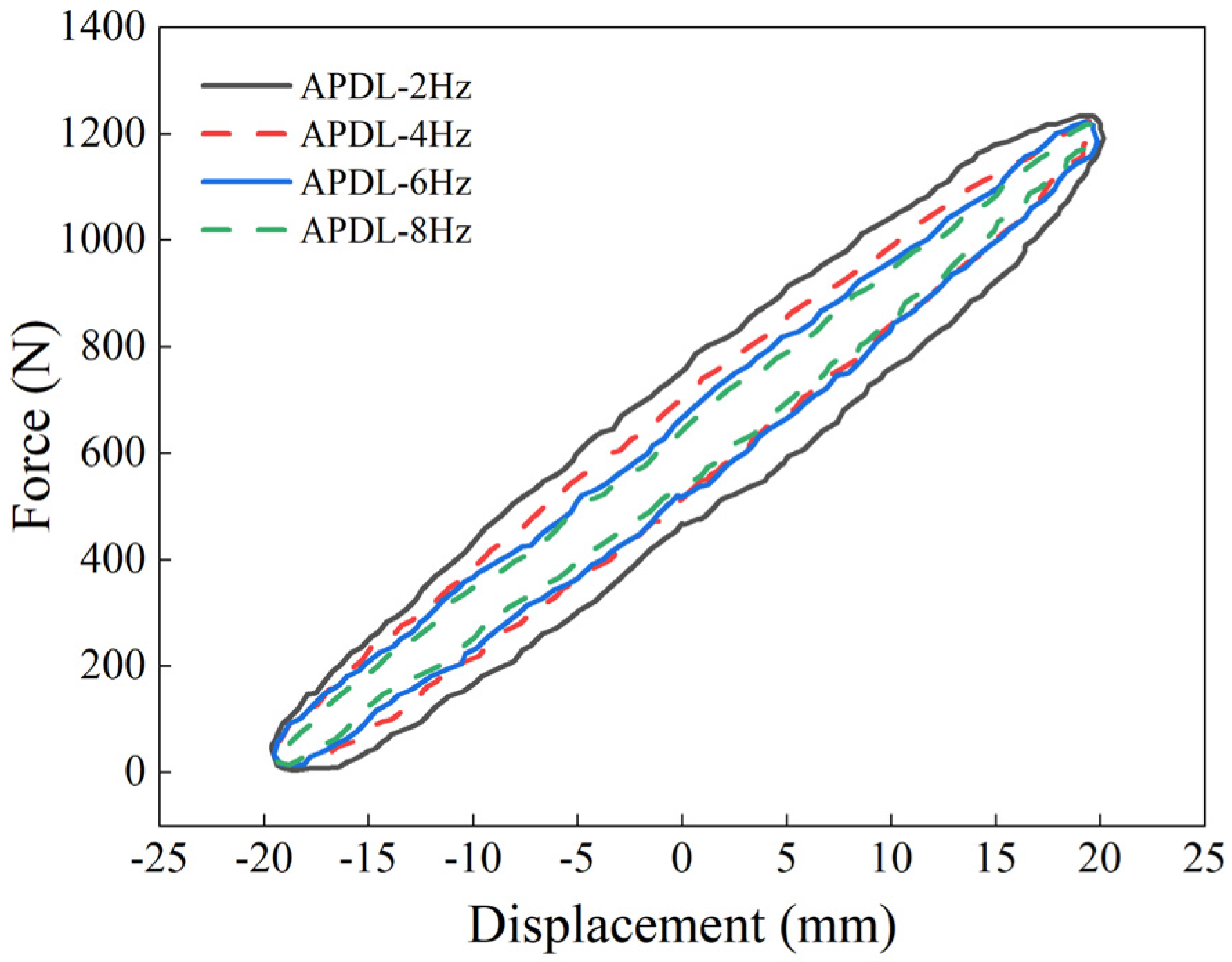
Despite these numerical differences, simulation calculations remain advantageous in capturing trends and operational convenience. To further observe the dynamic response behavior of the structure within the main frequency range of a crawler bulldozer, the frequency range was expanded to 2 Hz, 4 Hz, 6Hz, and 8Hz, and dynamic response comparisons were conducted. As shown in
Figure 18, the dynamic response of the S-NR3-NR3-S structure at these four frequencies reveals that the force–displacement hysteresis loop area decreases with increasing frequency, indicating reduced energy dissipation capacity. When the excitation frequency is 2 Hz, the force–displacement energy dissipation area is the largest, and the energy dissipation is also the highest. In contrast, at an excitation frequency of 8Hz, the energy dissipation area is smallest, and the energy dissipation is minimal. The energy dissipation ratio between these two frequency limits is 3.12.
The dynamic response curves in
Figure 18 provide the stiffness and damping values of the S-NR3-NR3-S structure at different frequencies (see
Table 8). The results show that as the frequency increases, the dynamic stiffness of the structure gradually increases, exhibiting a positive correlation. The dynamic stiffness is smallest at 2 Hz and largest at 8 Hz, with the rate of increase diminishing progressively. Specifically, the increase from 2 Hz to 4 Hz is 0.45 N/mm, from 4 Hz to 6 Hz is 0.25 N/mm, and from 6 Hz to 8 Hz is 0.32 N/mm. This indicates that as the frequency increases, the growth of dynamic stiffness slows down, eventually approaching a constant value. The structure becomes stiffer, but its energy dissipation capacity weakens, suggesting that the dynamic performance is better at low frequencies and that structural or material optimization is required at high frequencies.
Meanwhile, the damping coefficient decreases significantly with an increase in frequency, showing a negative correlation. This is attributed to the transition of the rubber’s nonlinear viscoelastic behavior to a more elastic response at higher frequencies, leading to reduced energy dissipation and weakened hysteretic effects. At 2 Hz, the damping coefficient is the highest, reaching 0.0275 N·s/mm, surpassing the sum of the damping coefficients at other frequencies. At 4 Hz, the damping coefficient is 0.00878 N·s/mm, which is greater than those at 6 Hz and 8 Hz, indicating that the structure exhibits superior dynamic performance at lower frequencies.
The dynamic-to-static stiffness ratio reflects the structural response under dynamic versus static loads. A high dynamic-to-static stiffness ratio indicates that the structure can maintain stable deformation under dynamic loads and withstand larger vibrations or impacts. However, if the ratio is too large, it may reduce the structure’s energy dissipation capacity. Conversely, a ratio that is too small suggests that the structure may experience excessive deformation, reduced rigidity, and a higher risk of instability or failure. In engineering applications, the typical range for the dynamic-to-static stiffness ratio is 1.4 to 1.5 [
26,
30]. For all four frequencies, the dynamic-to-static stiffness ratio falls within this range, and it increases with frequency. The minimum dynamic-to-static ratio occurs at 2 Hz, with a value of 1.405, and the increase in the ratio gradually decreases, ultimately stabilizing at 1.428 at 8 Hz.
The stored energy of the structure gradually decreases with increasing frequency. In contrast to the dissipated energy, the stored energy shows minimal variation between frequencies. The loss factor, which is the ratio of dissipated energy to stored energy, decreases as the frequency increases. From the data in
Table 8, it can be observed that the loss factor is highest at 2 Hz, and at the resonant frequency of 4 Hz, the loss factor is approximately half of the value at 2 Hz.
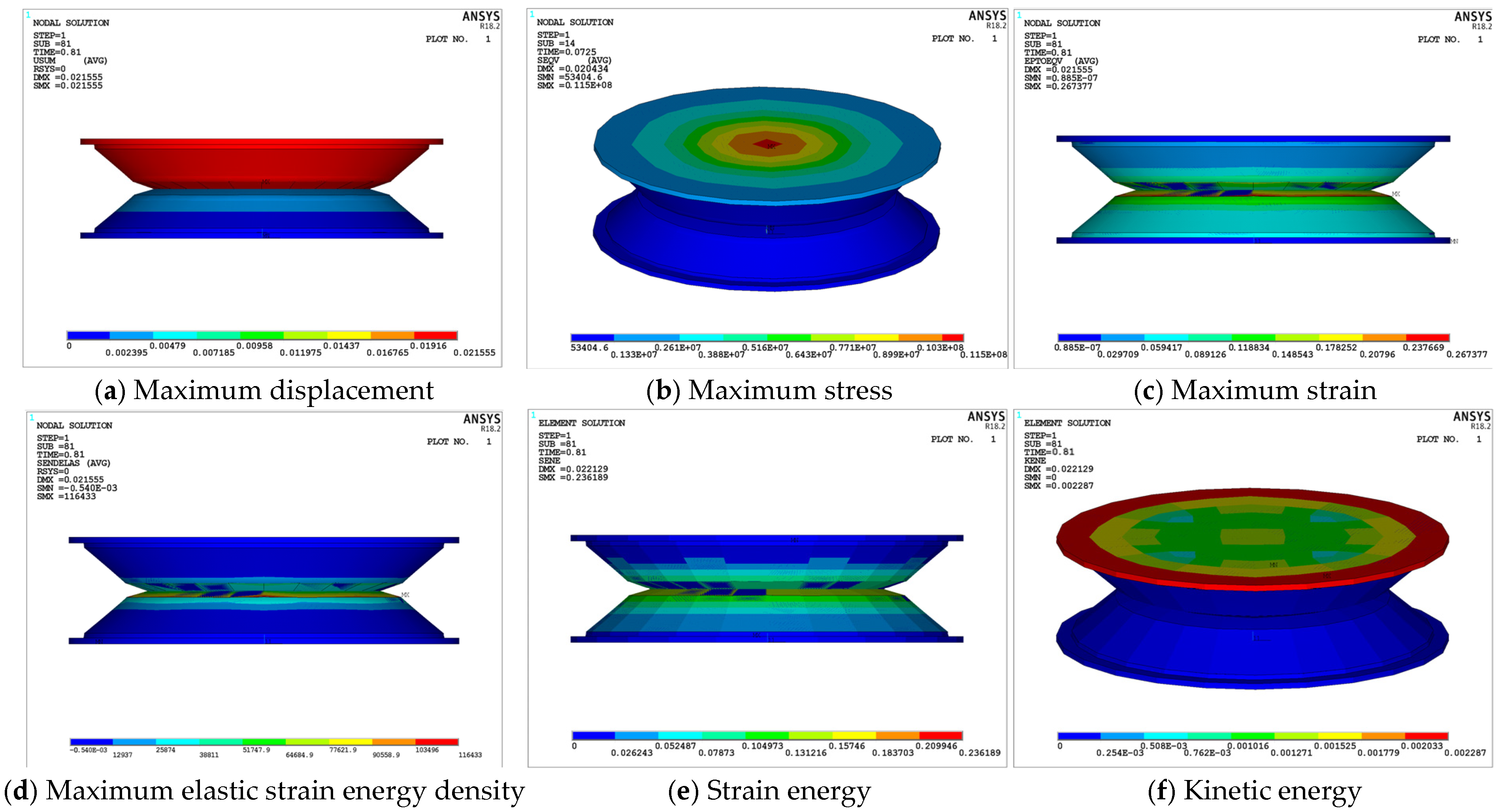
In summary, it can be concluded that the S-NR3-NR3-S structure exhibits superior dynamic performance in the low-frequency range (≤4 Hz). To further investigate, the transient dynamic response of this structure at 4 Hz was examined. The response cloud diagrams provide an intuitive view of whether the structure experiences failure and show the corresponding values for displacement, stress, and strain energy.
Figure 19 demonstrates that all mechanical parameters of the structure remain within safe limits, with no signs of stress concentration, strain energy concentration, or element failure. Under transient impact, the displacement amplitude of the structure exceeds the static response, and the maximum stress zone coincides with the static analysis, focusing on the central region of the 2-2-1 area. The maximum stress (
Figure 19b), maximum strain (
Figure 19c), and elastic strain energy density (
Figure 19d) all exceed the static values. This is primarily due to the nonlinear effects of the damping layer and the inertial effects of dynamic loading, leading to substantial transient oscillations within the structure over time. The maximum stress remains within the allowable stress limits for each layer, and the region of maximum elastic strain energy density is located at the interface between the upper and lower damping layers, which is below the
Ulimit value.
Figure 19e shows that the region with the highest strain energy is located at the contact area between the upper and lower damping layers, with a maximum strain energy of 0.236189 J.
Figure 19f illustrates the distribution of kinetic energy in the structure, with the maximum kinetic energy concentrated on the 2-2-1 supporting steel plate. This is because the external excitation is directly applied to the top steel plate, generating significant vibrational energy. The top steel plate transmits kinetic energy to the lower rubber layers, which, due to their larger mass and stiffness, absorb more energy, especially in the initial stages of vibration. As the vibration propagates through the rubber layers, the kinetic energy is gradually dissipated, and the rubber layers exhibit lower kinetic energy. Given the short duration of the transient impact, the initial kinetic energy of the top steel plate is larger, with the rubber layers playing a key role in buffering and energy absorption.
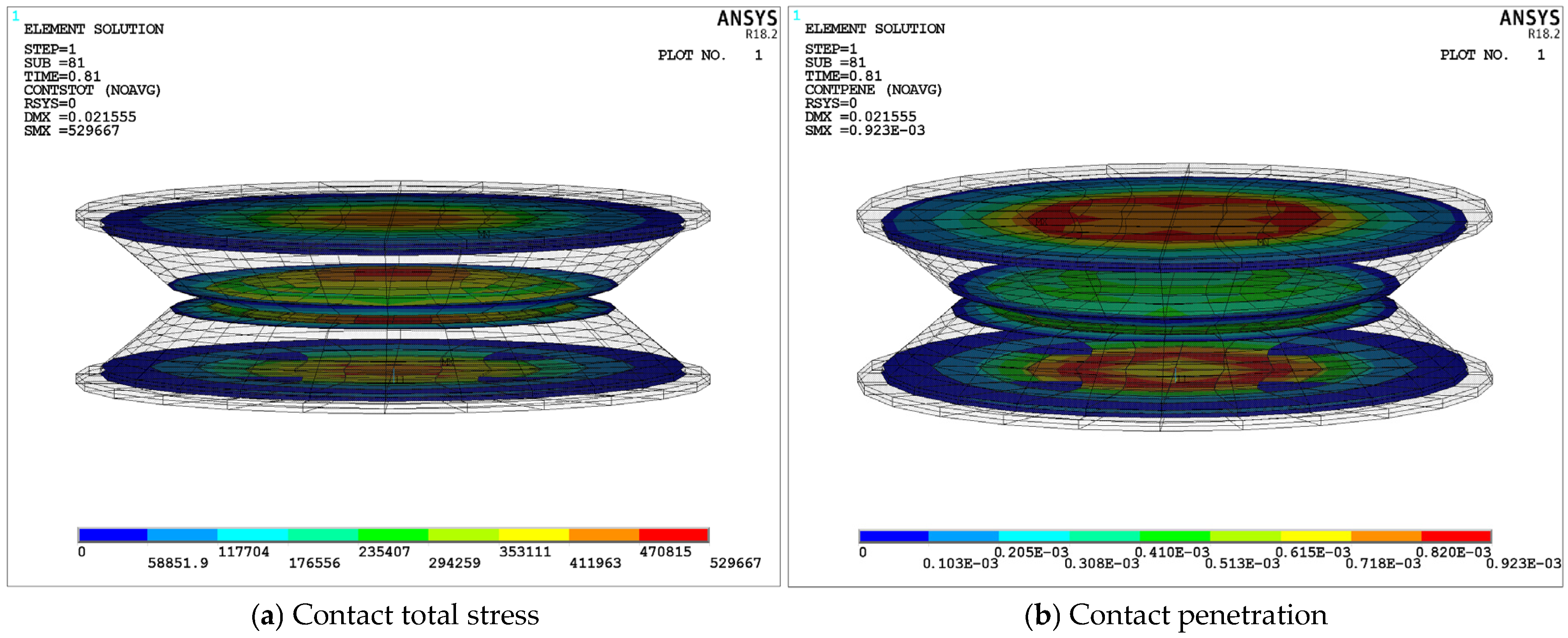
Figure 20 further confirms the contact stability of the S-NR3-NR3-S structure under transient dynamic impacts.
Figure 20a presents the total contact stress contour of the structure. From the figure, it can be seen that the maximum stress at the bonding or contact surfaces between the layers is much lower than the allowable stress of the structure. The maximum contact stress occurs at the contact surface between the upper and lower damping layers. Specifically, as shown in
Figure 20b, the contact penetration status of each contact surface is presented, with the maximum penetration value being 0.923E-3mm. This indicates that there is a small overlap (less than 0.01mm) between the contact surfaces of the upper and lower damping layers. Therefore, the contact model is quite accurate, and this penetration value does not significantly affect the mechanical behavior of the structure.
Based on the results obtained from both the combined simulation calculations and experimental tests, it can be concluded that the S-NR3-NR3-S structure exhibits superior dynamic performance within the low-frequency range. Compared to other structures, it is more suitable for the operating conditions of tracked bulldozers and other construction machinery.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}