
Martensitic Phase-Transforming Metamaterial: Concept and Model



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Modeling Approach
3. Method
4. Results
4.1. Analytical Results
4.2. Experimental Results
5. Discussion
5.1. Similarities and Differences with the Classification of Actual Martensitic Transformations
- (i)
- Deformation-induced martensitic transformation
- (ii)
- Stress-induced martensitic transformation (Strs-IMT)
- (iii)
- Strain-induced martensitic transformation (Strn-IMT)
5.2. Possibility of Thermally Induced Martensitic Transformation
6. Conclusions
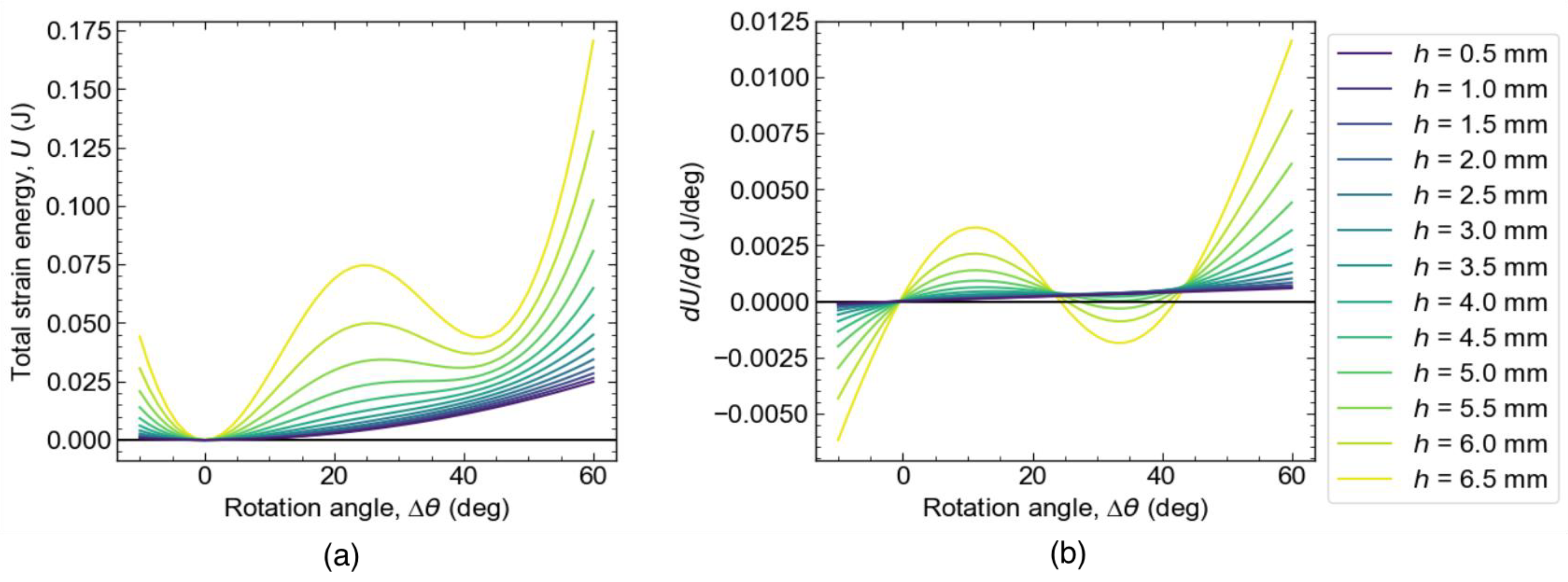
- The metamaterial can transition between two stable configurations via shear deformation. The change in the configuration is similar to that in the atomic arrangement associated with the martensitic transformation of real materials, such as structural changes due to repeated layer-by-layer shear deformation.
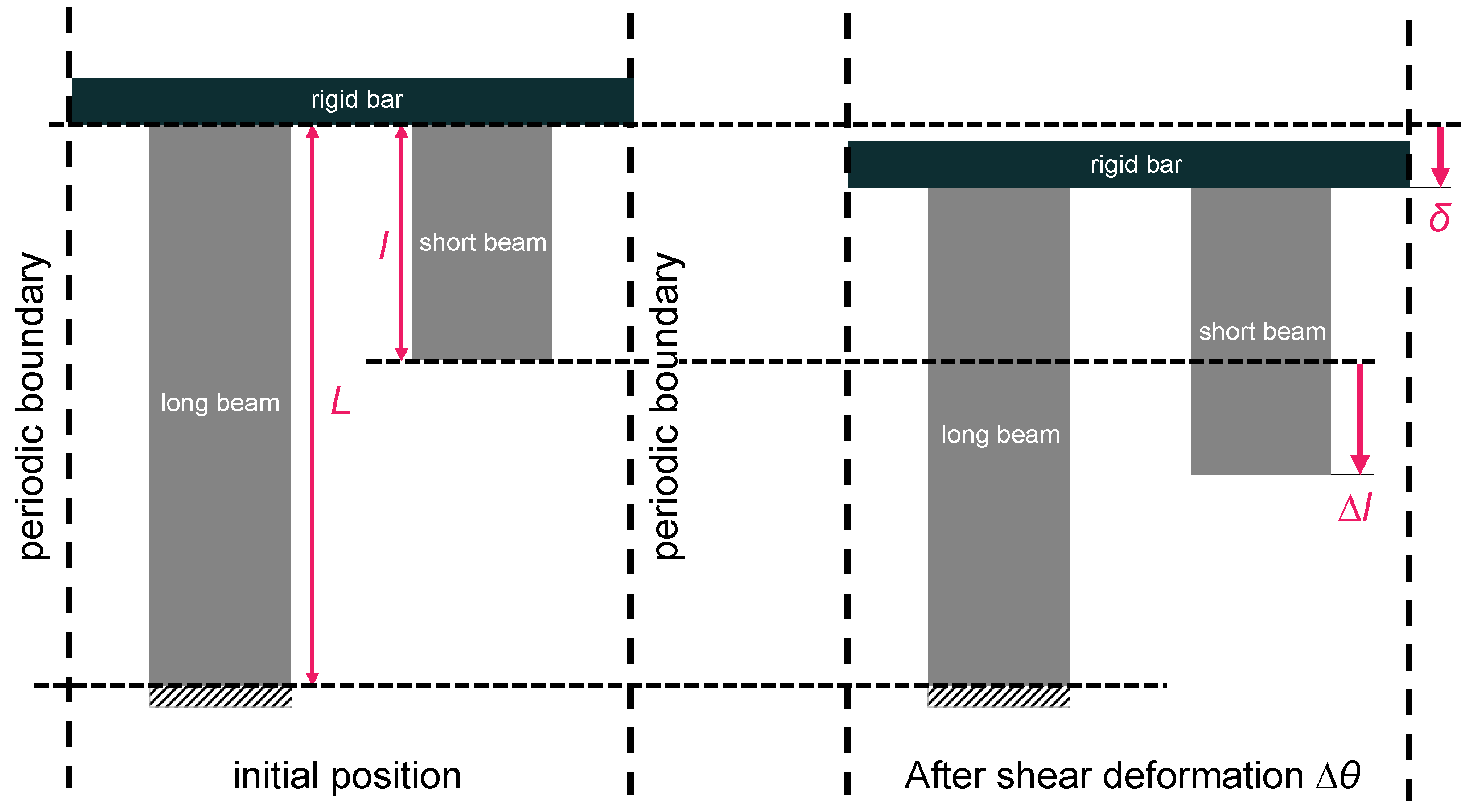
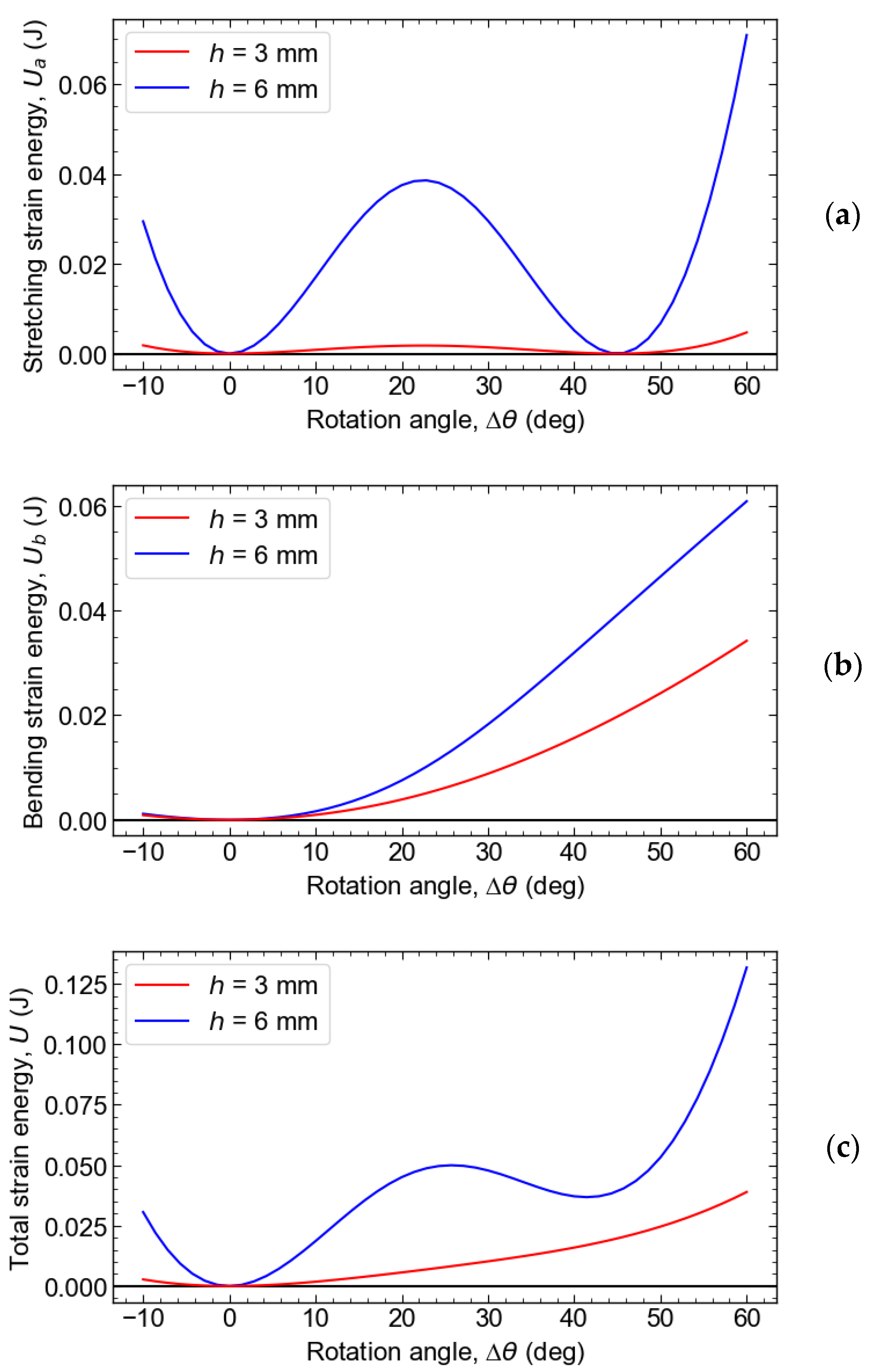
- The energy change governing the transition between the two configurations is tied to the tensile deformation of the short beams, the compressive alteration in the long beams, and the flexing of the connecting hinges. The energy changes in the metamaterial are formulated analytically as a function of the inclination angle associated with the shear deformation.
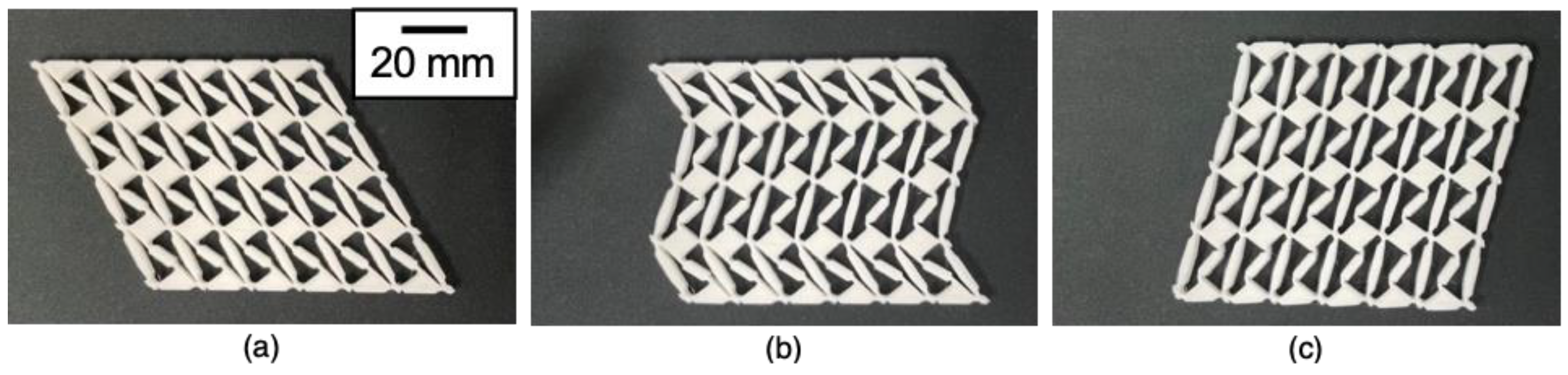
- This mechanical metamaterial can be fabricated using MEX-type AM of TPU by utilizing a flexure hinge as an alternative to the linkage connections of the beams. The deformation behavior of the mechanical metamaterial is similar to that of actual martensitic phase-transforming deformation behavior.
- The outcomes of this study are expected to pave the way for the development of new mechanical metamaterials, such as metamaterials exhibiting thermally induced martensite transformation, the shape memory effect, and superelasticity. This opens the door to potential technological innovations and applications, potentially revolutionizing how we approach design and functionality in various domains.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kadic, M.; Milton, G.W.; van Hecke, M.; Wegener, M. 3D Metamaterials. Nat. Rev. Phys. 2019, 1, 198–210. [Google Scholar] [CrossRef]
- Jiao, P.; Mueller, J.; Raney, J.R.; Zheng, X.R.; Alavi, A.H. Mechanical Metamaterials and Beyond. Nat. Commun. 2023, 14, 6004. [Google Scholar] [CrossRef] [PubMed]
- Takezawa, A.; Kobashi, M.; Kitamura, M. Porous Composite with Negative Thermal Expansion Obtained by Photopolymer Additive Manufacturing. APL Mater. 2015, 3, 076103. [Google Scholar] [CrossRef]
- Liu, S.; Li, Y. Thermal Expansion of Hybrid Chiral Mechanical Metamaterial with Patterned Bi-Strips. Adv. Eng. Mater. 2023, 25, 2300478. [Google Scholar] [CrossRef]
- Gao, N.; Zhang, Z.; Deng, J.; Guo, X.; Cheng, B.; Hou, H. Acoustic Metamaterials for Noise Reduction: A Review. Adv. Mater. Technol. 2022, 7, 1–23. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, X. Metamaterials: A New Frontier of Science and Technology. Chem. Soc. Rev. 2011, 40, 2494–2507. [Google Scholar] [CrossRef]
- Su, R.; Chen, J.; Zhang, X.; Wang, W.; Li, Y.; He, R.; Fang, D. 3D-Printed Micro/Nano-Scaled Mechanical Metamaterials: Fundamentals, Technologies, Progress, Applications, and Challenges. Small 2023, 19, 2206391. [Google Scholar] [CrossRef]
- de Moor, E.; Lacroix, S.; Clarke, A.J.; Penning, J.; Speer, J.G. Effect of Retained Austenite Stabilized via Quench and Partitioning on the Strain Hardening of Martensitic Steels. Metall. Mater. Trans. A Phys. Metall. Mater. Sci. 2008, 39, 2586–2595. [Google Scholar] [CrossRef]
- Edmonds, D.V.; He, K.; Rizzo, F.C.; De Cooman, B.C.; Matlock, D.K.; Speer, J.G. Quenching and Partitioning Martensite-A Novel Steel Heat Treatment. Mater. Sci. Eng. A 2006, 438–440, 25–34. [Google Scholar] [CrossRef]
- Soleimani, M.; Kalhor, A.; Mirzadeh, H. Transformation-Induced Plasticity (TRIP) in Advanced Steels: A Review. Mater. Sci. Eng. A 2020, 795, 140023. [Google Scholar] [CrossRef]
- McCracken, J.M.; Donovan, B.R.; White, T.J. Materials as Machines. Adv. Mater. 2020, 32, 1–48. [Google Scholar] [CrossRef] [PubMed]
- Otsuka, K.; Ren, X. Physical Metallurgy of Ti–Ni-Based Shape Memory Alloys. Prog. Mater. Sci. 2005, 50, 511–678. [Google Scholar] [CrossRef]
- Yang, X.; Ma, L.; Shang, J. Martensitic Transformation of Ti50(Ni50−xCux) and Ni50(Ti50−xZrx) Shape-Memory Alloys. Sci. Rep. 2019, 9, 3221. [Google Scholar] [CrossRef] [PubMed]
- Mohd Jani, J.; Leary, M.; Subic, A.; Gibson, M.A. A Review of Shape Memory Alloy Research, Applications and Opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Baxevanis, T.; Landis, C.M.; Lagoudas, D.C. On the Fracture Toughness of Pseudoelastic Shape Memory Alloys. J. Appl. Mech. Trans. ASME 2014, 81, 1–8. [Google Scholar] [CrossRef]
- Restrepo, D.; Mankame, N.D.; Zavattieri, P.D. Phase Transforming Cellular Materials. Extrem. Mech. Lett. 2015, 4, 52–60. [Google Scholar] [CrossRef]
- Pollalis, W.; Shah, P.; Zhang, Y.; Mankame, N.; Zavattieri, P.; Pujol, S. Dynamic Response of a Single-Degree-of-Freedom System Containing Phase Transforming Cellular Materials. Eng. Struct. 2023, 275, 115205. [Google Scholar] [CrossRef]
- Correa, D.M.; Seepersad, C.C.; Haberman, M.R. Mechanical Design of Negative Stiffness Honeycomb Materials. Integr. Mater. Manuf. Innov. 2015, 4, 165–175. [Google Scholar] [CrossRef]
- Debeau, D.A.; Seepersad, C.C.; Haberman, M.R. Impact Behavior of Negative Stiffness Honeycomb Materials. J. Mater. Res. 2018, 33, 290–299. [Google Scholar] [CrossRef]
- Correa, D.M.; Klatt, T.; Cortes, S.; Haberman, M.; Kovar, D.; Seepersad, C. Negative Stiffness Honeycombs for Recoverable Shock Isolation. Rapid Prototyp. J. 2015, 21, 193–200. [Google Scholar] [CrossRef]
- Chen, T.; Pauly, M.; Reis, P.M. A Reprogrammable Mechanical Metamaterial with Stable Memory. Nature 2021, 589, 386–390. [Google Scholar] [CrossRef] [PubMed]
- Yang, H.; Ma, L. Multi-Stable Mechanical Metamaterials by Elastic Buckling Instability. J. Mater. Sci. 2019, 54, 3509–3526. [Google Scholar] [CrossRef]
- Coulais, C.; Sabbadini, A.; Vink, F.; van Hecke, M. Multi-Step Self-Guided Pathways for Shape-Changing Metamaterials. Nature 2018, 561, 512–515. [Google Scholar] [CrossRef] [PubMed]
- Liu, K.; Tachi, T.; Paulino, G.H. Invariant and Smooth Limit of Discrete Geometry Folded from Bistable Origami Leading to Multistable Metasurfaces. Nat. Commun. 2019, 10, 4238. [Google Scholar] [CrossRef]
- Kanegae, S.; Okugawa, M.; Koizumi, Y. Atom-Mimetic Cube-Diagonally Muliti-Axed Phase-Transforming Cellular Material for Multi-Axial Bistable Metamaterial. Virtual Phys. Prototyp. 2023; submitted. [Google Scholar]
- Nagayama, H.; Kanegae, S.; Hosoda, M.; Okugawa, M.; Koizumi, Y. Thermally Induced Phase Transforming Cellular Lattice Driven by Bimetal Beams. MRS Adv. 2022, 7, 701–705. [Google Scholar] [CrossRef]
- Hu, Z.; Wei, Z.; Wang, K.; Chen, Y.; Zhu, R.; Huang, G.; Hu, G. Engineering Zero Modes in Transformable Mechanical Metamaterials. Nat. Commun. 2023, 14, 1266. [Google Scholar] [CrossRef]
- Ou, J.; Ma, Z.; Peters, J.; Dai, S.; Vlavianos, N.; Ishii, H. KinetiX—Designing Auxetic-Inspired Deformable Material Structures. Comput. Graph. 2018, 75, 72–81. [Google Scholar] [CrossRef]
- Alqasimi, A. Design of Shape Morphing Structures Using Bistable Elements. Ph.D. Dissertation, University of South Florida, Tampa, FL, USA, 2015. [Google Scholar]
- Ling, M.; Howell, L.L.; Cao, J.; Chen, G. Kinetostatic and Dynamic Modeling of Flexure-Based Compliant Mechanisms: A Survey. Appl. Mech. Rev. 2020, 72, 030802. [Google Scholar] [CrossRef]
- Yong, Y.K.; Lu, T.-F.; Handley, D.C. Review of Circular Flexure Hinge Design Equations and Derivation of Empirical Formulations. Precis. Eng. 2008, 32, 63–70. [Google Scholar] [CrossRef]
- Li, C.; Wang, N.; Chen, B.; Shang, G.; Zhang, X.; Chen, W. Spatial Compliance Modeling and Optimization of a Translational Joint Using Corrugated Flexure Units. Mech. Mach. Theory 2022, 176, 104962. [Google Scholar] [CrossRef]
- Schotborgh, W.O.; Kokkeler, F.G.M.; Tragter, H.; Van Houten, F.J.A.M. Dimensionless Design Graphs for Flexure Elements and a Comparison between Three Flexure Elements. Precis. Eng. 2005, 29, 41–47. [Google Scholar] [CrossRef]
- Mitsunobu, T.; Koizumi, Y.; Lee, B.-S.; Yamanaka, K.; Matsumoto, H.; Li, Y.; Chiba, A. Role of Strain-Induced Martensitic Transformation on Extrusion and Intrusion Formation during Fatigue Deformation of Biomedical Co–Cr–Mo–N Alloys. Acta Mater. 2014, 81, 377–385. [Google Scholar] [CrossRef]
- Koizumi, Y.; Suzuki, S.; Yamanaka, K.; Lee, B.-S.; Sato, K.; Li, Y.; Kurosu, S.; Matsumoto, H.; Chiba, A. Strain-Induced Martensitic Transformation near Twin Boundaries in a Biomedical Co–Cr–Mo Alloy with Negative Stacking Fault Energy. Acta Mater. 2013, 61, 1648–1661. [Google Scholar] [CrossRef]
- Mitsunobu, T.; Koizumi, Y.; Lee, B.-S.; Chiba, A. Asymmetric Slip Trace Formation in Tension/Compression Cyclic Deformation of Biomedical Co–Cr–Mo–N Alloy with Negative Stacking Fault Energy. Scr. Mater. 2014, 74, 52–55. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kanegae, S.; Okugawa, M.; Koizumi, Y. Martensitic Phase-Transforming Metamaterial: Concept and Model. Materials 2023, 16, 6854. https://doi.org/10.3390/ma16216854
Kanegae S, Okugawa M, Koizumi Y. Martensitic Phase-Transforming Metamaterial: Concept and Model. Materials. 2023; 16(21):6854. https://doi.org/10.3390/ma16216854
Chicago/Turabian StyleKanegae, Sosuke, Masayuki Okugawa, and Yuichiro Koizumi. 2023. "Martensitic Phase-Transforming Metamaterial: Concept and Model" Materials 16, no. 21: 6854. https://doi.org/10.3390/ma16216854
APA StyleKanegae, S., Okugawa, M., & Koizumi, Y. (2023). Martensitic Phase-Transforming Metamaterial: Concept and Model. Materials, 16(21), 6854. https://doi.org/10.3390/ma16216854