1. Introduction
The analysis of active foil bearings should begin with the traditional gas foil bearings, which have been developed for many years in numerous research centres around the world. Their design required a lot of both experimental and theoretical investigations. In 1970, Barnett and Silver first demonstrated that foil bearings can be widely used in high-speed turbomachines [
1]. The development of foil bearing technology was presented in 2019 by Samanta et al. [
2]. The authors pointed out that foil bearing technology is very promising as there are already many geometric solutions for foil bearings, which can be efficiently applied.
Kulkarni and Jana [
3] presented the effect of geometric parameters of corrugated foil on the performance of foil bearings. The effect of the geometrical parameters on the load-carrying capacity of a multi-leaf gas bearing was presented by Li et al. [
4]. The analysis of a structural model including gaps and friction was presented by Arghir and Benchekroun [
5]. This paper presents the structural model of a bump-type foil bearing based on contact mechanisms. The model considers the elasticity of the top foil and the possibility of three types of gaps: between the rotor and the top foil, between the top foil and the bump foil and between the bump foil and the bearing sleeve. The model has been verified by experimental studies.
Foil bearings are characterized by an adaptive structure, as shown by Zywica and Bagiński [
6]. Due to this foil structure, variability of the bearing sleeve diameter allows for adapting the foils of the active foil bearing to the current operating conditions.
Development of the foil bearings requires the use of advanced mathematical models and precisely tuned parameters, as well as extensive research to explain various aspects of their operation. Numerical and experimental studies on the temperature control of gas bearings were presented by Martowicz et al. [
7]. A year later, Zdziebko and Martowicz extended these investigations, also showing the stress distribution within the bearing [
8].
Because actuators are the main part of some mechatronic systems, it is always necessary to know their parameters to assess their influence on whole machines. In 2022, Xuan and Seung [
9] wrote an article on state-of-the-art smart material actuators that have been created over the last decade, in which much attention was paid to their control aspects for various applications. This is a comprehensive review of smart material actuators, which focuses on their control aspects for various applications. The analysed actuators were actively applied to various control systems.
Sone et al. [
10] presented a study on vibration suppression of cantilever beams using piezoelectric materials. The authors wrote that the piezoelectric vibration suppression technology utilises the inverse piezoelectric effect of piezoelectric materials to suppress the vibration of mechanisms through stress or strain. Chen et al. [
11] presented a study on the experimental characterization of hysteresis in piezoceramic actuators. The authors showed the equipment used in their experimental study. The study was conducted with different excitations. The results consist of temperature and hysteresis loops of the actuator. Riccio et al. [
12] presented the development of a combined micro-macro mechanics and used an analytical approach to design spring-based actuators with a shape-memory alloy, followed by experimental validation.
Tamburrano et al. [
13] showed the design of servo valves driven by piezoelectric actuators. The authors wrote that the use of commercially available piezoelectric actuators such as piezo stacks amplified piezo stacks, rectangular benders and ring benders is very promising for the actuation of the main and pilot stages of servo valves. These actuators can also be used to develop a new design, and their characteristics are thoroughly discussed.
Romano and Tannuri [
14] presented the modelling, control and experimental validation of a novel actuator based on shape-memory alloys. The paper presents the development of a mechanical actuator using a shape-memory alloy with a cooling system based on the thermoelastic effect. Experiments were conducted to evaluate the closed-loop performance, stability and robustness properties of the actuator. The results showed that the proposed cooling system and controller can improve the dynamic response of the actuator. Frequency characteristics were measured to verify dynamic performance. Xing et al. [
15] presented a design and experiment of a new type of noncontact linear piezoelectric actuator modulated by an electromagnetic field. The proposed actuator uses electromagnetic force to modulate and transfer the locomotion between the stator and the runner. The drive scheme reduces the wear and friction between the stator and the runner.
Heya and Hirata [
16] present an experimental verification of a three-degree-of-freedom electromagnetic actuator for image stabilization. This paper aims to develop a system to suppress the vibration. The principle of working here is different than the standard gimbal mechanism, which is widely used. The authors show the proposed actuator and its experimental verification.
In 2017, an example of preload control in a foil bearing was presented by Feng et al. [
17]. The authors showed an active bump-type foil bearing (ABFB) in which preload can be controlled by changing the voltage applied to the piezoelectric actuators. The aim was to create a lubrication gap with variable geometry to improve bearing performance. The authors demonstrated that effective preload control is possible. In 2020, Guan et al. [
18] presented a more extensive study of the same bearing. Their objective was to determine the rotordynamic characteristics of the rigid shaft supported on the ABFB. The authors showed the preload variations of the traditional foil bearing with hinges and piezoelectric actuators.
The tests were carried out to develop an active foil bearing. As there are many possible implementations, various design solutions were considered. It is possible to control the diameter of the foil bearing using the levers, as shown by Feng et al. [
17].
When selecting the best possible actuators for the active foil bearing, many different types of actuators were considered. This paper summarizes the results of the laboratory tests performed on the three most promising types of actuators for this bearing. Moreover, these actuators were tested under real operating conditions, which is the main original element of the paper. Usually, the study presented in the literature is not devoted to actuators tested in real operational conditions. A review of active bearings, in which their mode of operation was taken into account, was presented by Breńkacz et al. [
19]. There are many types of active bearings (including active foil bearings) in which the studied actuators are used or may be used in the future. An example may be the active gas bearing presented by Horikawa et al. [
20]. Performance characteristics that have been obtained under similar temperature and load conditions to those of the active bearings can be directly used in the design process of these bearings. In general, the entire system (bearing) can be condensed over the selected degree of freedom (
) and considered as a one-dimensional dynamic problem.
If the chosen degree of freedom coincides with the motion direction of the actuator those two elements can be combined into a system of equations:
where the index
is related to the actuator, the vector of displacements has form
and
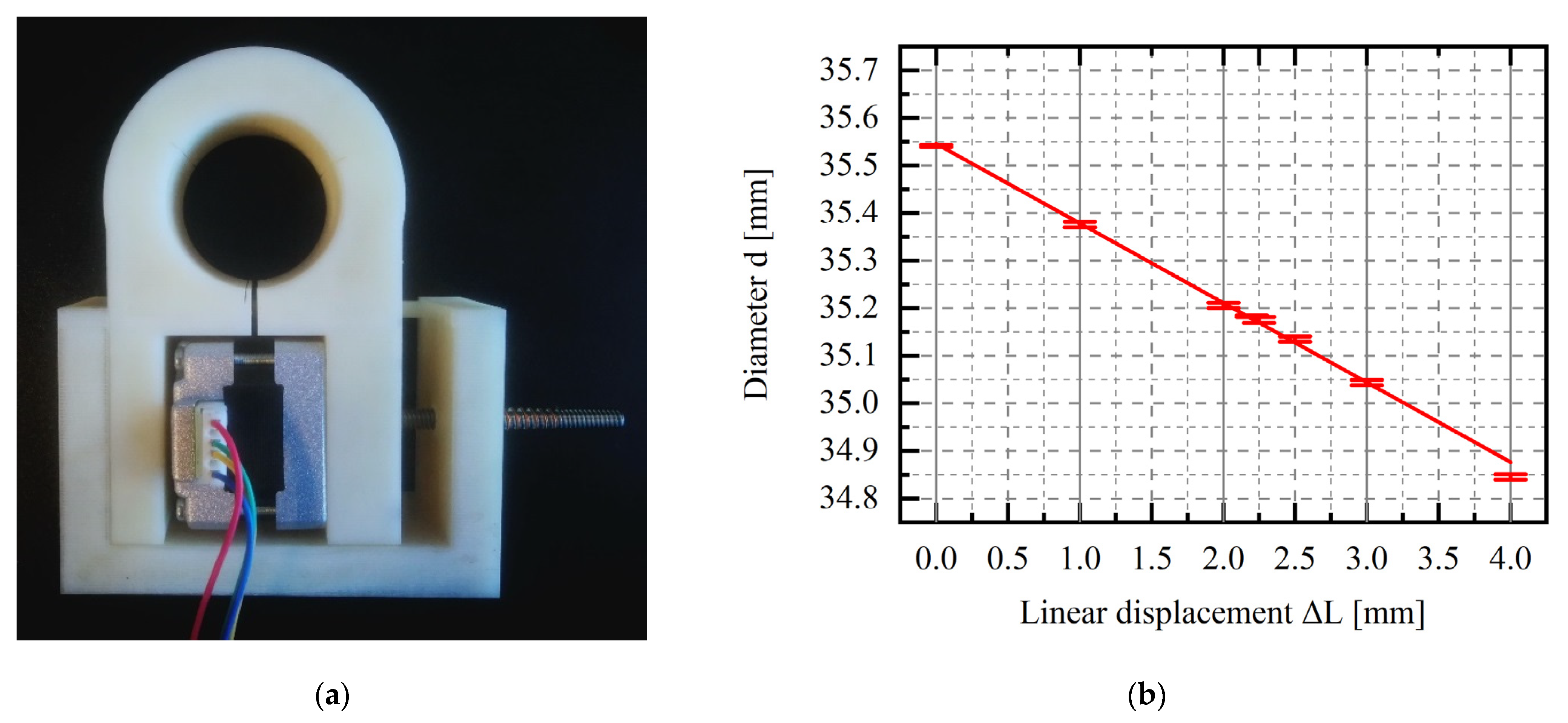
is the force applied by the actuator. Based on the knowledge of the bearing and actuator parameters, it is possible to model the dynamics of the entire system. If necessary, an additional element describing other significant degrees of freedom, e.g., in the direction of the bearing diameter, can be introduced into the system of equations. During this work, several variants of the active foil bearing were considered. One of the variants was made using a 3D printer. Its shape is shown in
Figure 1a. Dependences between the bearing parameters (two main of themes are stiffness and damping coefficients—k
Bxx, k
Byy, c
Bxx, c
Byy) and parameters of actuators are shown in
Figure 1b.
After the first test, in which the bearing diameter was changed, the bearing diameter was measured with a three-contact diameter gauge. The measured diameter of the bearing as a function of motor displacement is shown in
Figure 2.
Linear displacement, which results in a change in bearing diameter, can be generated using various types of smart materials and stepper motors. Due to the applicable nature of the research conducted, the main selection criterion was the possibility of direct application of a ready-made component in the bearing, which means choosing a ready-made solution in the form of actuators. Three types of linear actuators, based on a piezoelectric element, a shape-memory alloy and a stepper motor, were selected from the range of available products.
In recent years, piezoelectric actuators have experienced significant development. The latest solutions combine broad working strokes with high precision and resolution. Moreover, piezoelectric actuators provide fast response, high stiffness, and actuation force [
21]. There is a very large group of piezoelectric materials. Indeed, about a thousand types of piezoelectric crystals have been discovered, but only a few have found practical applications. Synthetic ceramics are most often used in linear actuators [
22], although recently piezoelectric polymers have become more common [
23]. Piezoelectric transducers made of synthetic ceramic materials are usually cuboid or cylinder-shaped, and to increase the operating range they are often stacked or integrated into amplifying devices such as levers or bridges [
24].
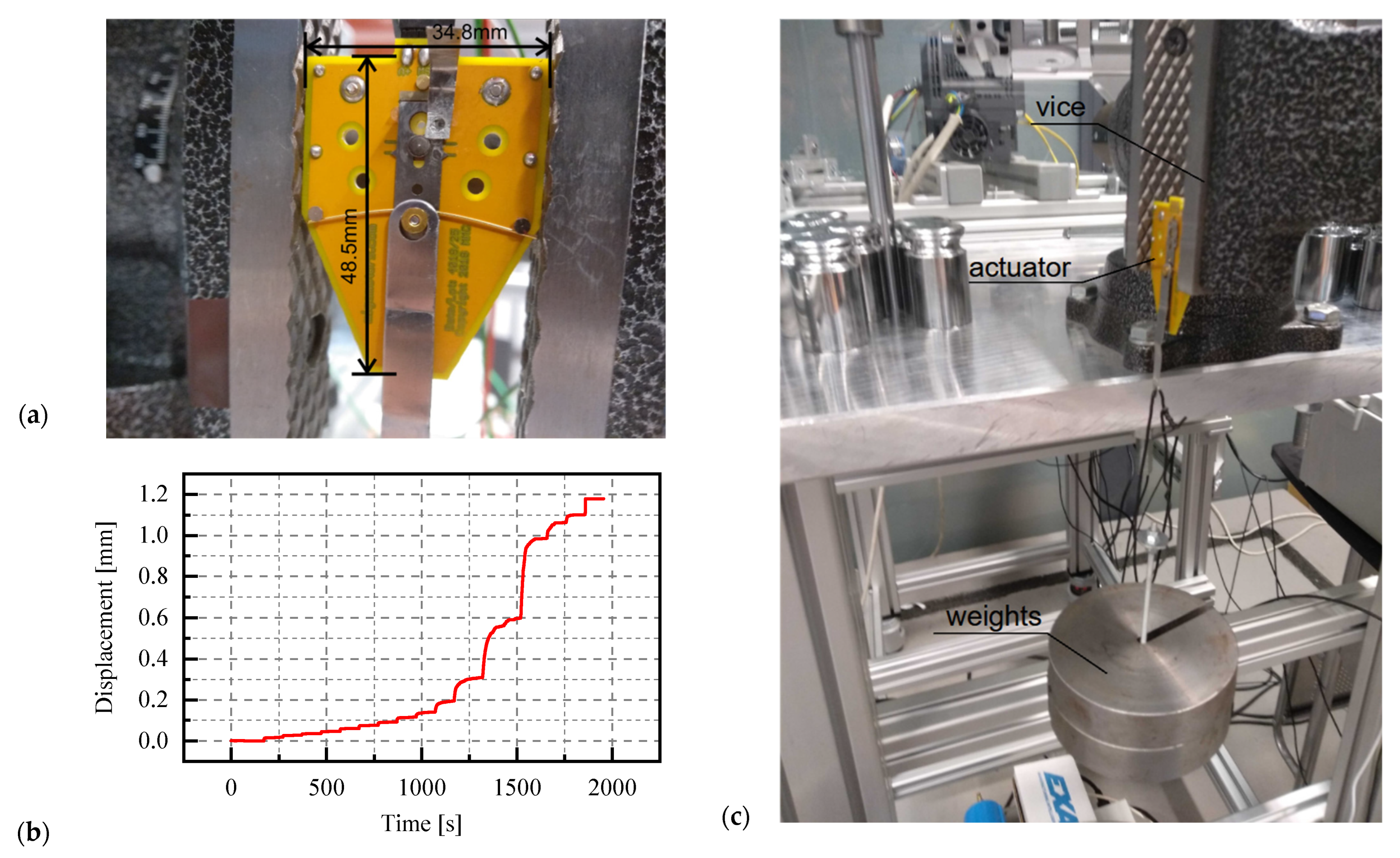
Shape memory alloys (SMAs) are another group of smart materials used in the construction of linear actuators. These materials change shape when they are heated above a certain temperature. The physical phenomenon that is responsible for this is martensitic transformation. The elongation that occurs during this process can reach up to 8%. For this reason, SMA materials are typically used in actuators in the form of strands or thin wires. So far, SMA actuators have been widely used mainly in robotics [
25] but they have also been successfully used in civil engineering [
26].
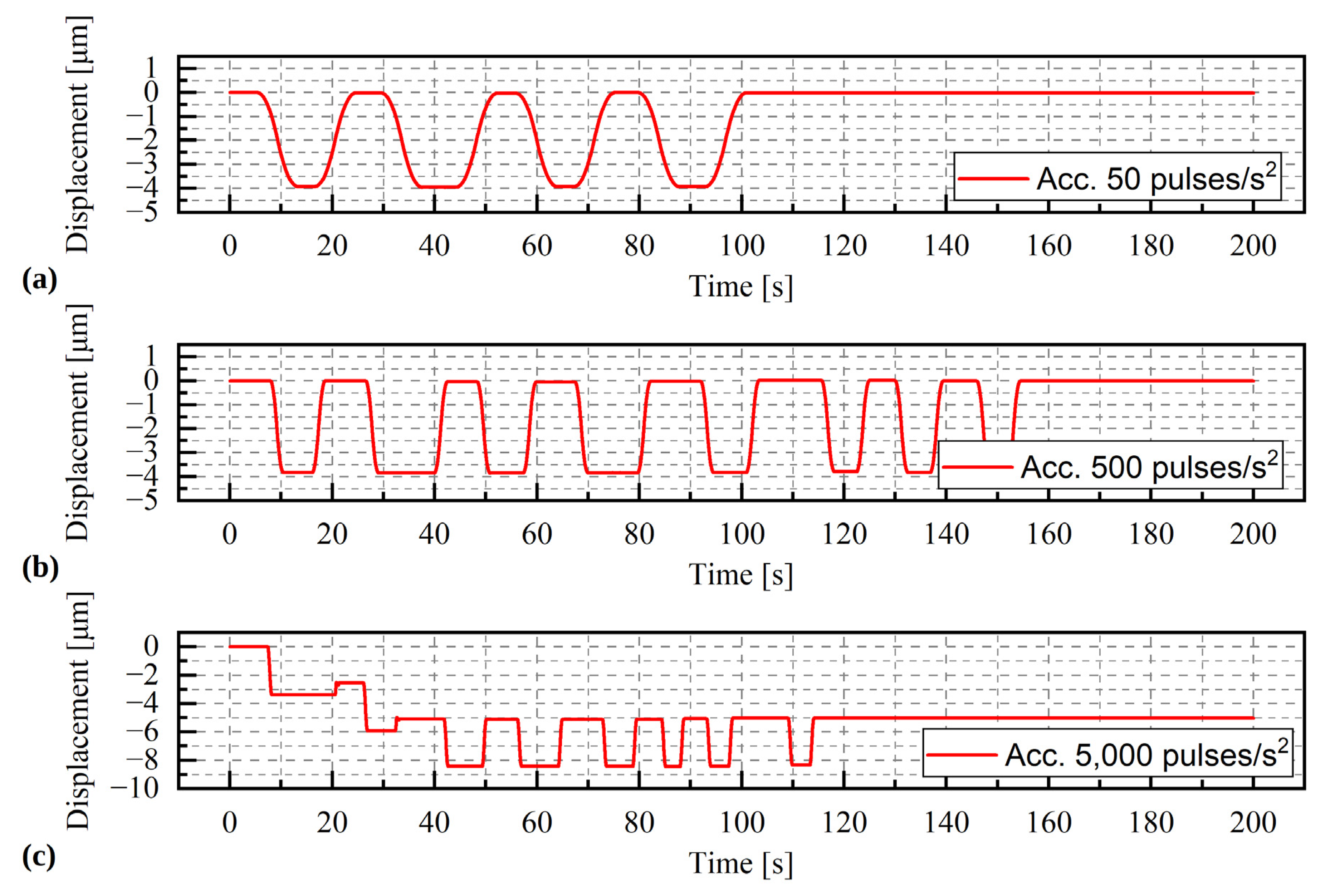
A stepper motor is an electrical device powered by impulse voltage that causes a precisely defined rotor movement. The rotation is a multiple of a specific step, which corresponds to a certain angle of rotation [
27]. Stepper motors have several important advantages, such as high accuracy, repeatability, ability to operate under high load or torque, and high durability. Due to these advantages, they are widely used in many industries. A wide variety of stepper motors, which are available on the market, find applications in many industries, such as the medical industry [
28], robotics [
29], and the mechanical industry.
For analysing rotating machinery, we measure among others the displacement of rotor shafts. It is easy to measure the trajectory of the rotating shaft, moment of torque, or acceleration of bearing supports. In the case of active bearings, there are a couple of new essential parameters. The most important in our opinion is the time of response, that is, the time that it takes to change from one diameter of bearing to the other one. The time, spread, and acceleration of this movement directly affect the movement of the rotating shaft. Essential parameters are also the operating range and the characteristics of actuators’ work parameters under loads and high temperature conditions. We can better describe the bearing and its working characteristics by knowing the characteristics of the whole mechanical system. All these parameters depend very much on the actuator characteristics.
The article presents the research results obtained for three selected elements: a piezoelectric stack, an SMA actuator, and a stepper motor tested in operational conditions. The main goal of the research presented in this paper was to determine the characteristics of the control signal (i.e., displacement) and to evaluate actuators in terms of use as active elements in the foil bearing.
4. Discussion and Conclusions
The process of designing an active foil bearing presents many challenges in terms of foil bearing characteristics. When designing this type of bearing, many important elements must be taken into account in the active control system. From a practical point of view, it is very important to determine the characteristics of the actuators because they will directly affect the characteristics of the active foil bearing. Their reaction time, control accuracy and maximum force they can transmit will determine the limitations of active foil bearings. Based on this article, it is possible not only to assess the use of the tested actuators in similar designs, but also, through the prism of these results, to get a more complete picture of the characteristics of all active foil bearings that are presented in the literature.
This article presents the results of experimental tests conducted on three selected actuators that use various smart materials or stepper motors. Their common feature is the ability to generate a linear displacement or force, but they have different operating ranges and accuracy. The differences in actuator performance can be minimized by the proper design of the active foil bearing. For example, it can be divided into two parts, with a single main actuator (as shown in paper No. [
30]). Another solution is to divide the active foil bearing into several parts. In some cases, the researchers also use levers to increase the effective displacement generated by the actuators [
17]. Due to the variety of designs available on the market, all actuators discussed in this article can be used directly not only in active foil bearings but also in other types of active bearings.
The piezoelectric actuator allows for a smooth and quick change of displacements within a range of −10–50 µm. A preload of up to 98.1 N does not affect its operating range; slight differences during the displacement are observed only at high frequencies. However, it is linked to the method of implementation of the preload, by adding additional masses. The displacement range of the actuator can be increased using levers or other multiplier mechanisms. Its main drawback lies in its hysteretic properties, visible especially in quasi-static tests. In systems that use a piezoelectric element, it may be necessary to use additional measurement sensors to monitor the displacements.
The range of linear displacements generated by the SMA actuator is much wider than that of the piezoelectric stack—up to 1.6 mm, which is accompanied by a high sensitivity to preload. In the analysed range of preload (0–19.62 N), there are visible differences in the relationship between displacement and duty cycle. The SMA actuator also has a long response time and reaches the maximum displacement at the specified value of the duty cycle, which takes from a few seconds to several minutes. The use of this type of actuator significantly limits the possibility of smooth and rapid control of the mechanical system. The big disadvantage of the actuator is its one-way operation. In addition, the tests carried out at different temperatures show a strong dependence between the ambient temperature and the displacement during the duty cycle. As the ambient temperature decreases, the maximum displacement measured for a given duty cycle value also decreases. This is also accompanied by a slower reaching of set values. The possibility of using the SMA actuator in a bearing may therefore require the development of a precise analytical model, which would take into account environmental parameters; otherwise, the long stabilization time of this element may cause difficulties in obtaining the expected displacements.
The stepper motor has the greatest displacement range and low sensitivity to external loads. Due to the nature of its operation, the regulation is not completely smooth. When the motor performs a certain number of steps (revolutions), each of them translates into a linear displacement of 5 µm of the lead screw nut. However, this does not exclude the possibility of precise control using this actuator. Below a certain load level, the stepper motor does not show any sensitivity to external loads. It is only when this level is exceeded that skips or blockages of the displacements (rotations) of the pin are observed. This load limit depends on the acceleration of the motor, and it decreases as the acceleration increases. The stepper motor provides high repeatability even at high operating speeds. Due to the displacement range and the low sensitivity to preload, the use of this motor in active bearings is very promising.


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}