
Comparison of Ultrasonic Non-Contact Air-Coupled Techniques for Characterization of Impact-Type Defects in Pultruded GFRP Composites


Abstract
1. Introduction
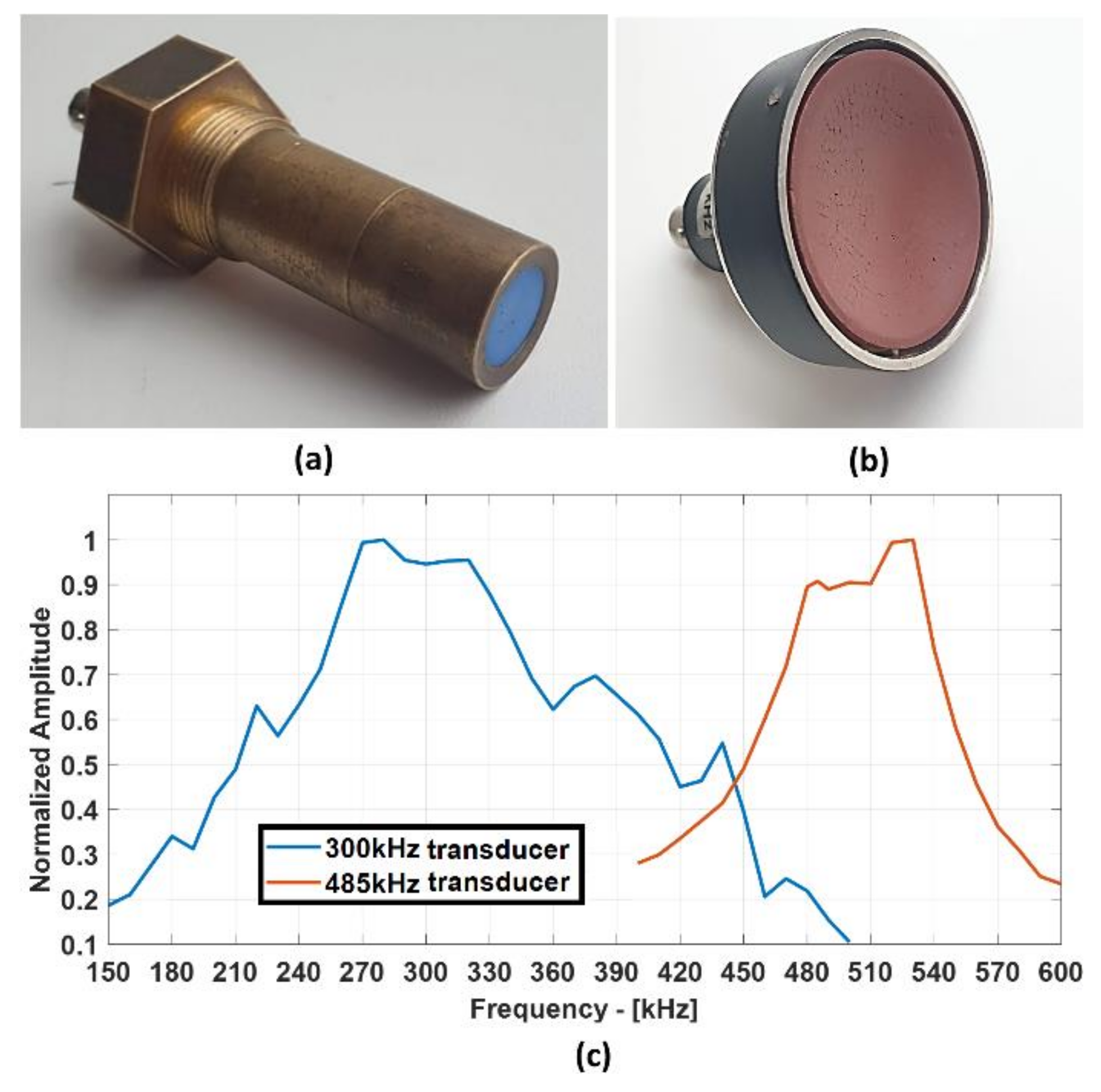
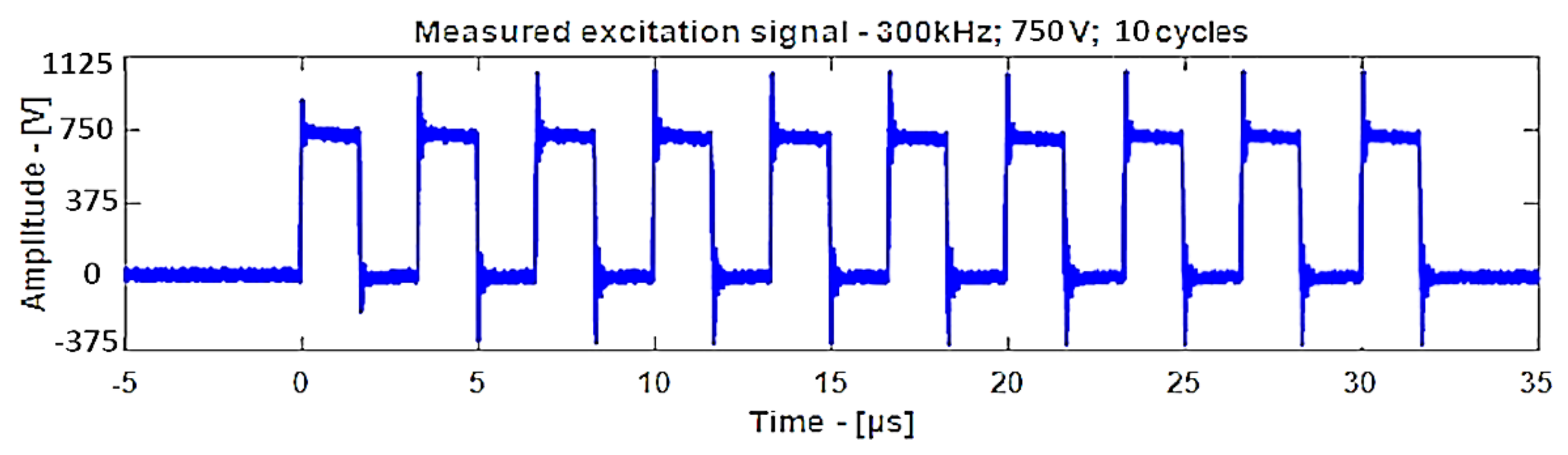
- Air-coupled through transmission method using 300 kHz single-element unfocused transducers and 485 kHz composite focused transducers;
- Air-coupled guided waves using 300 kHz single-element unfocused transducers;
- Guided wave tomography using 300 kHz single-element unfocused transducers.
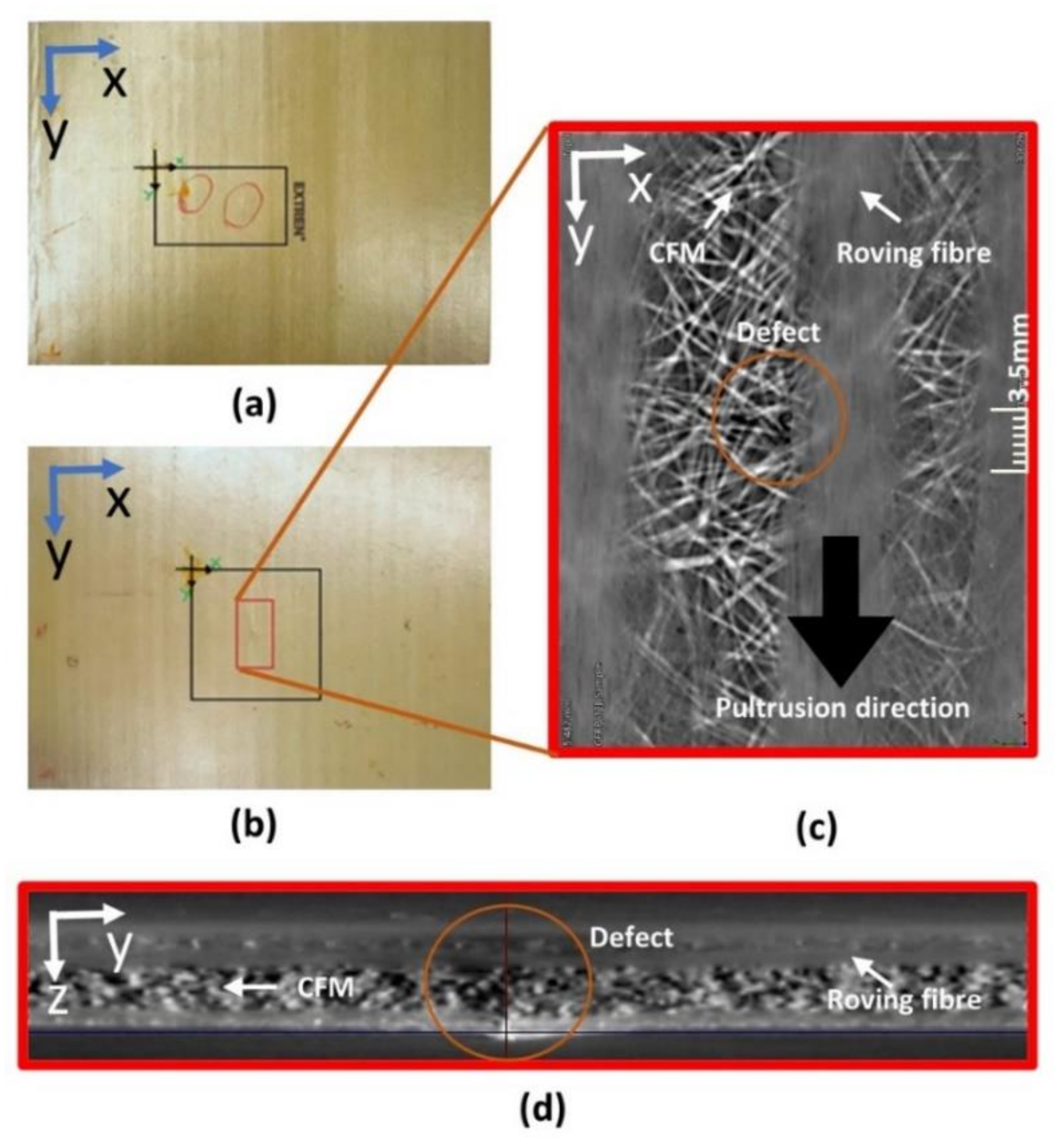
2. The Specimen Used for the Study
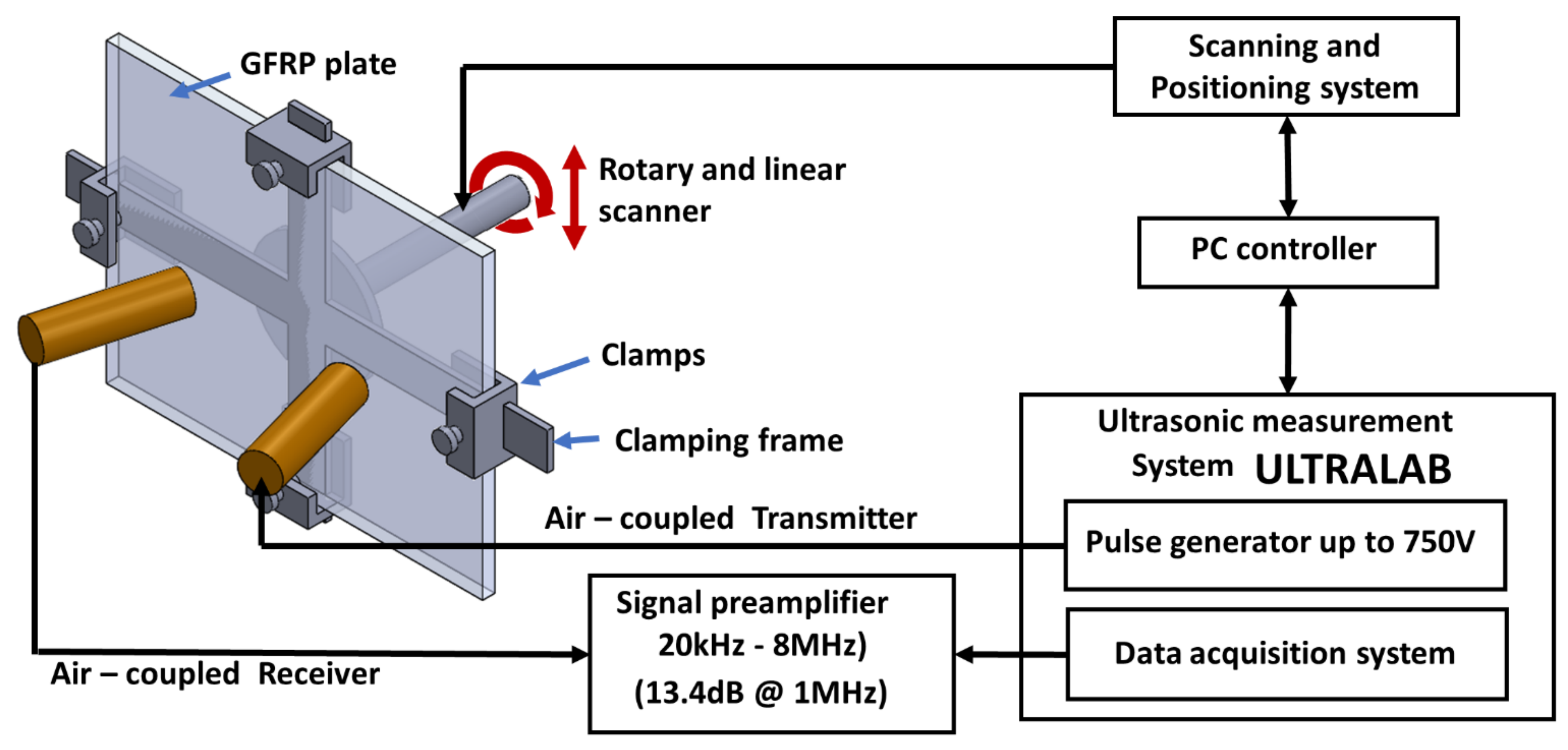
3. Techniques for Investigation
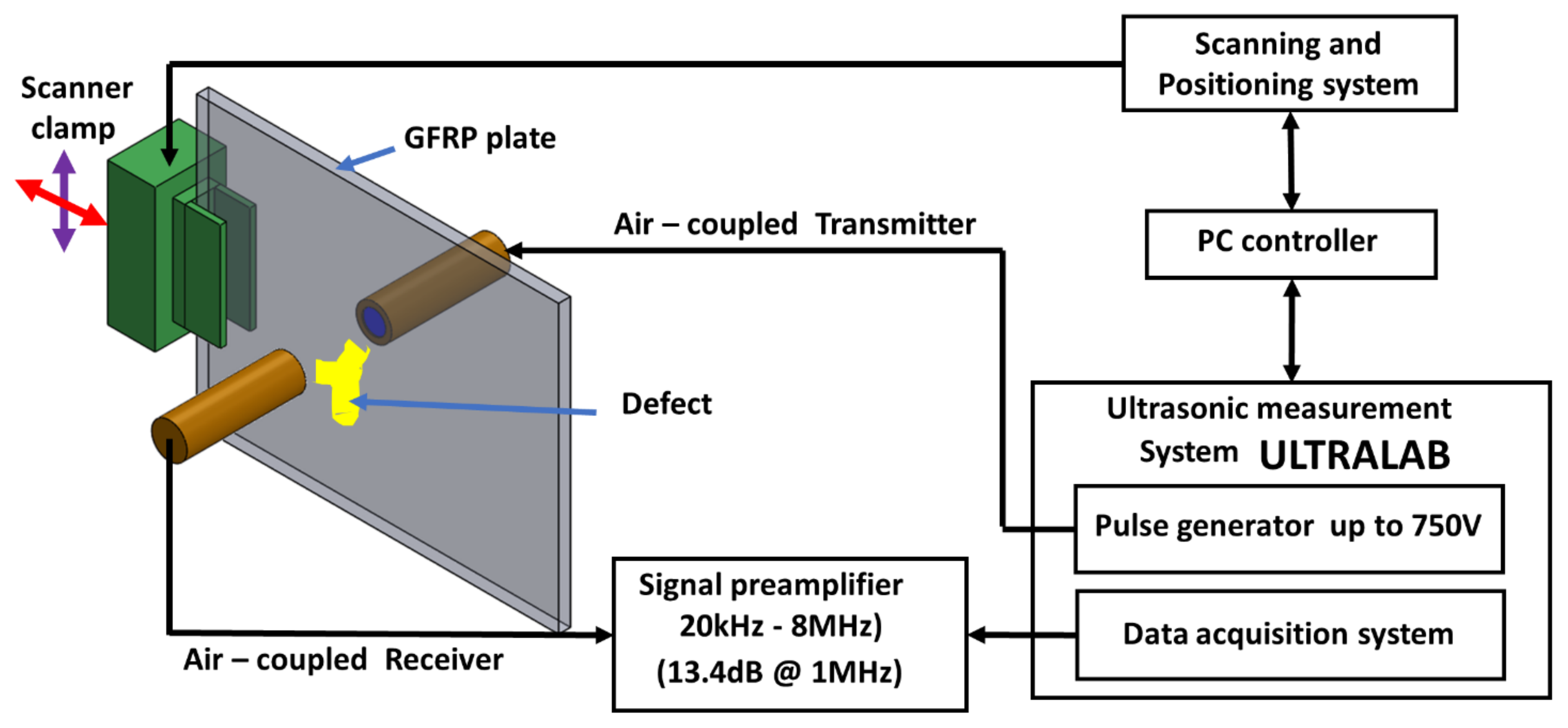
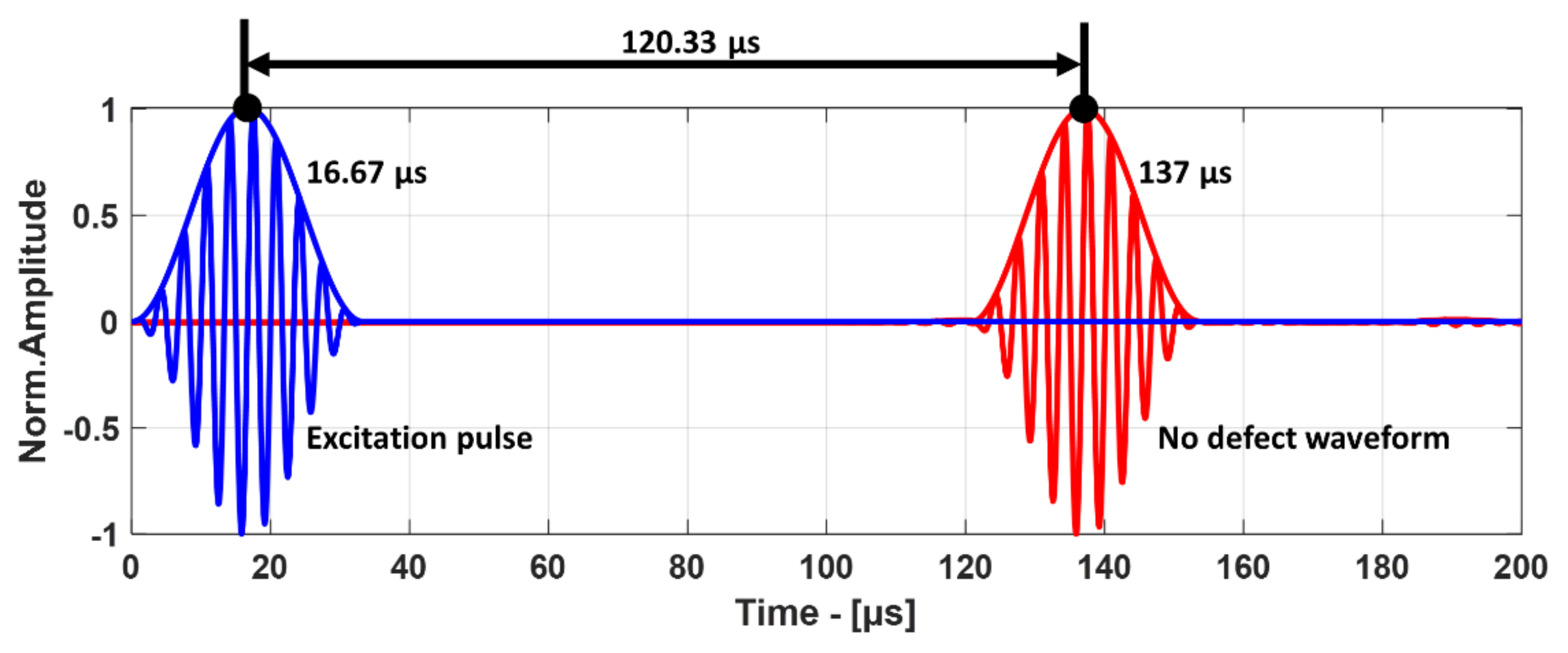
3.1. Bulk-Wave through Transmission Technique
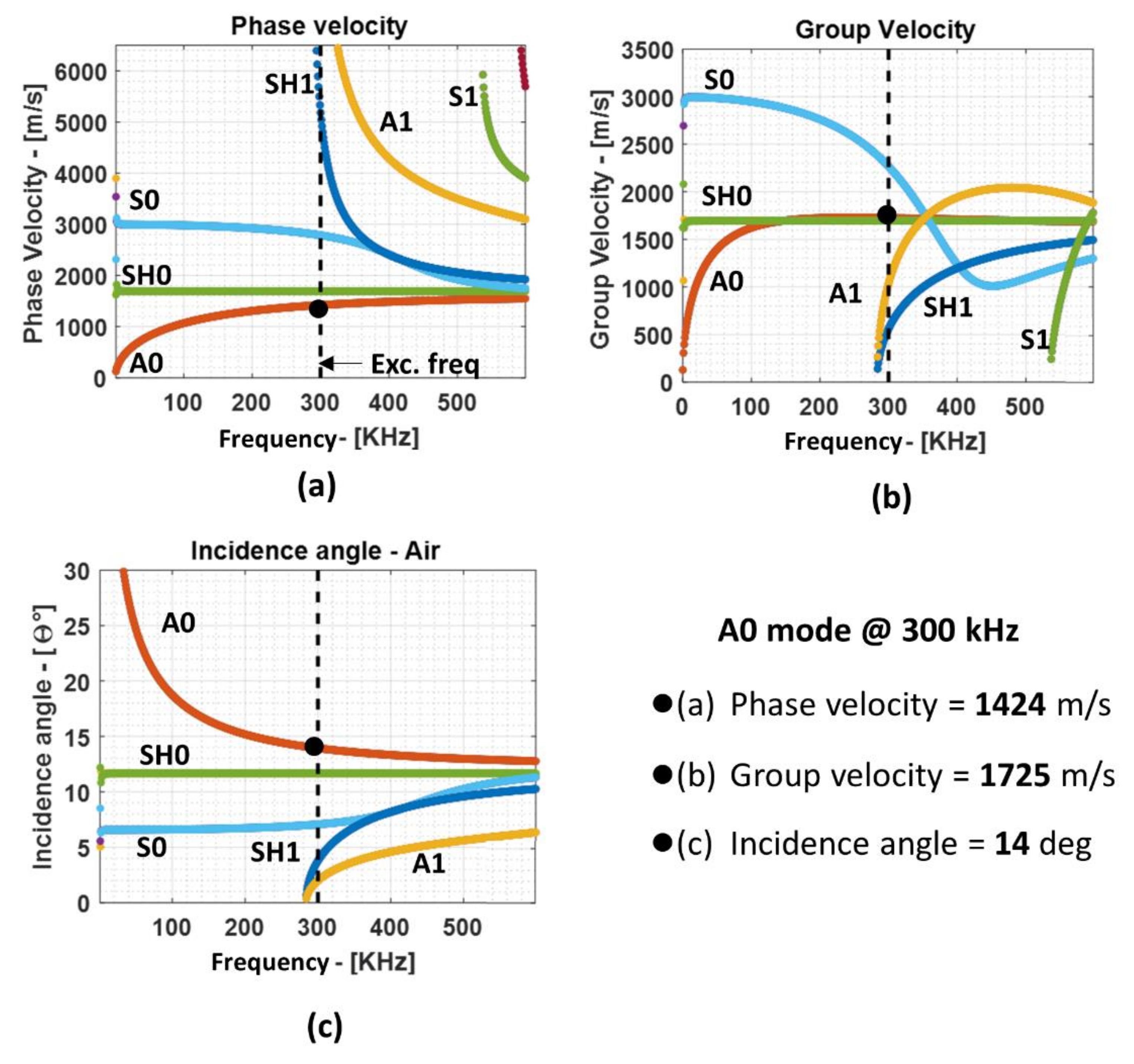
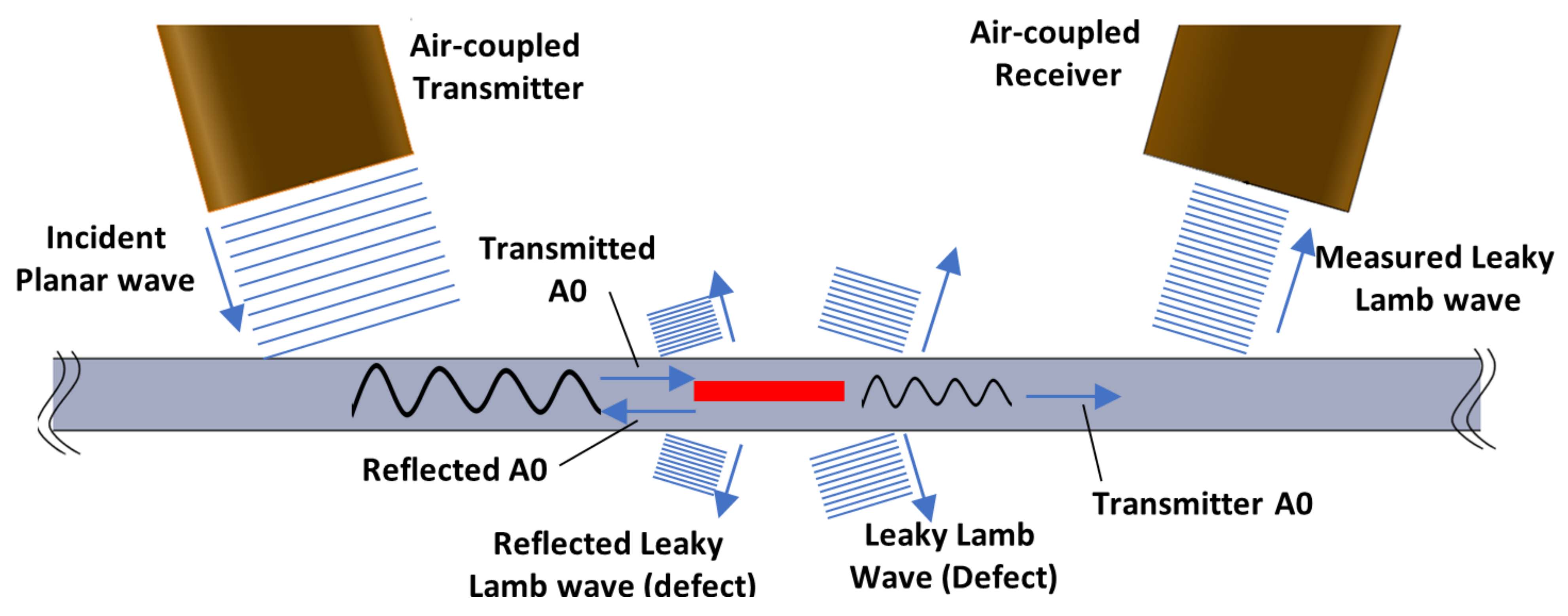
3.2. Guided Lamb Waves and Dispersion Curves
- The air-coupled transmitter placed at a specific angle generates ultrasonic longitudinal waves (plane waves) in air;
- The incident plane wave is transferred into the waveguide (plate-like sample) and causes constructive and suppressive interference, transforms, and propagates as guided Lamb waves;
- Guided waves traveling inside the waveguide cause mechanical perturbation in the surrounding air medium, which generates leaky Lamb waves. The leaky Lamb waves are measured using the air-coupled receiver.
- The required incidence angle is relatively large when compared to other modes; therefore, the chance that other modes will be generated inside the sample along with A0 mode is sufficiently low;
- Due to the shorter wavelength among the fundamental modes, the A0 mode will be more sensitive to smaller defects such as disbond and delamination in the composite plate.
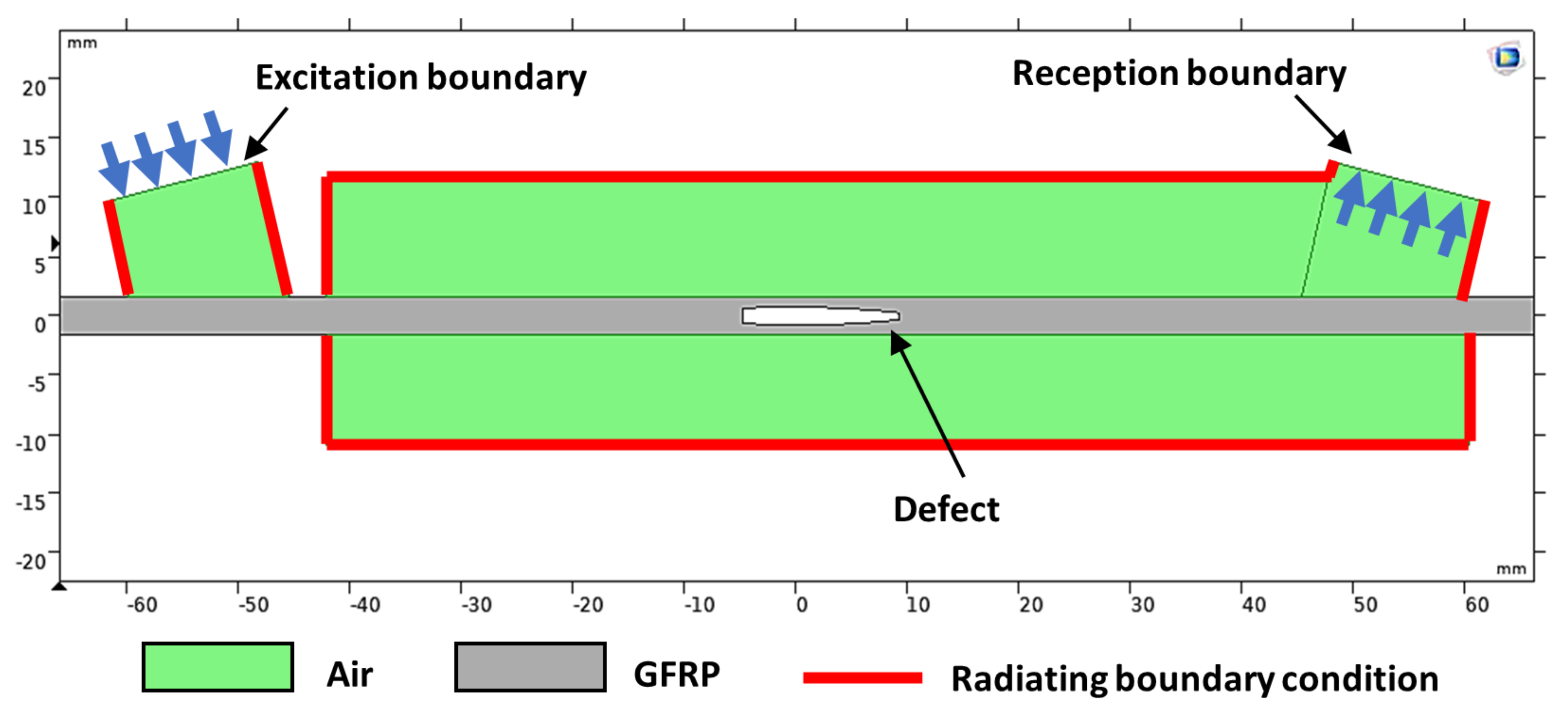
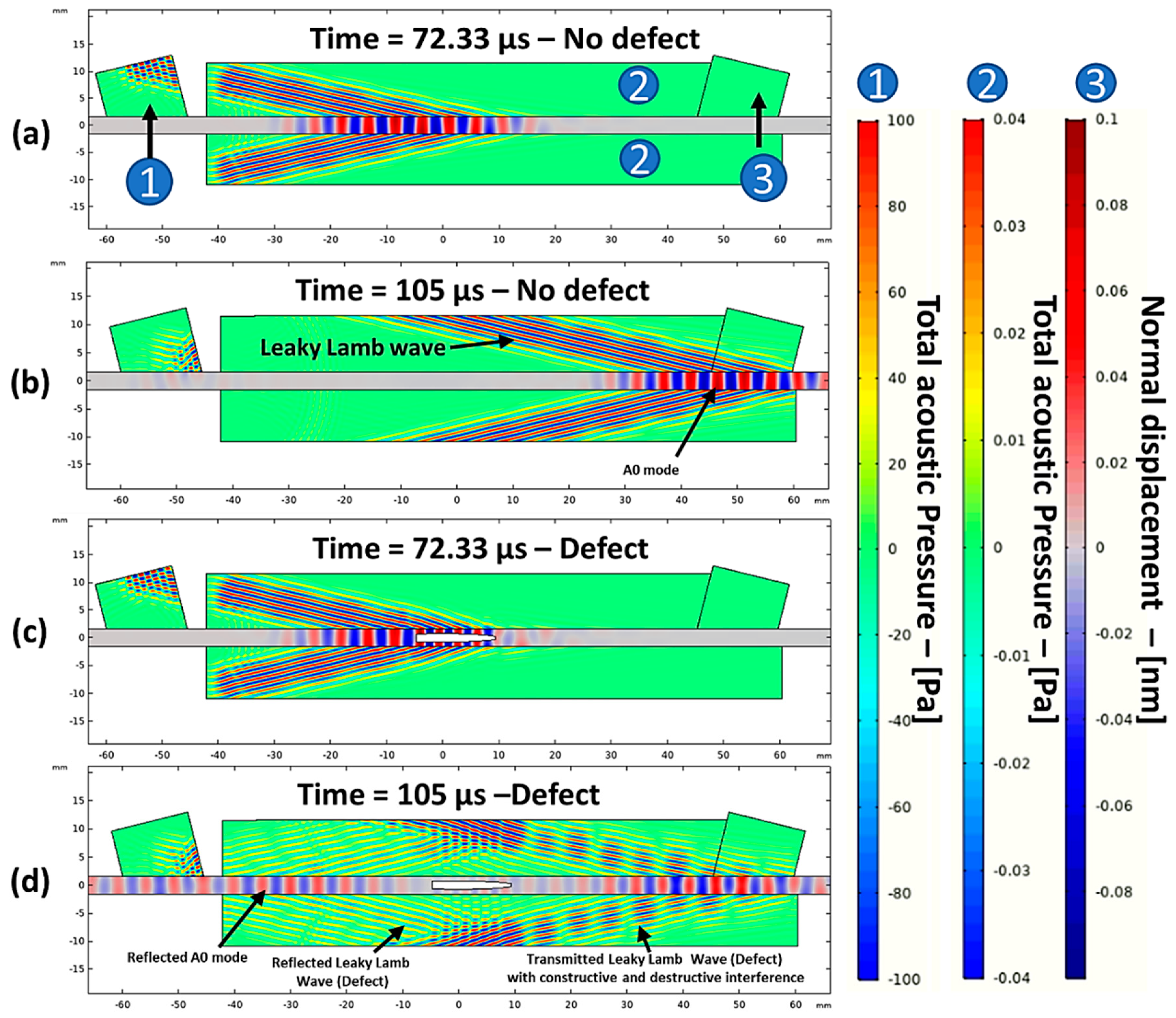
3.3. Guided Wave Numerical Simulation
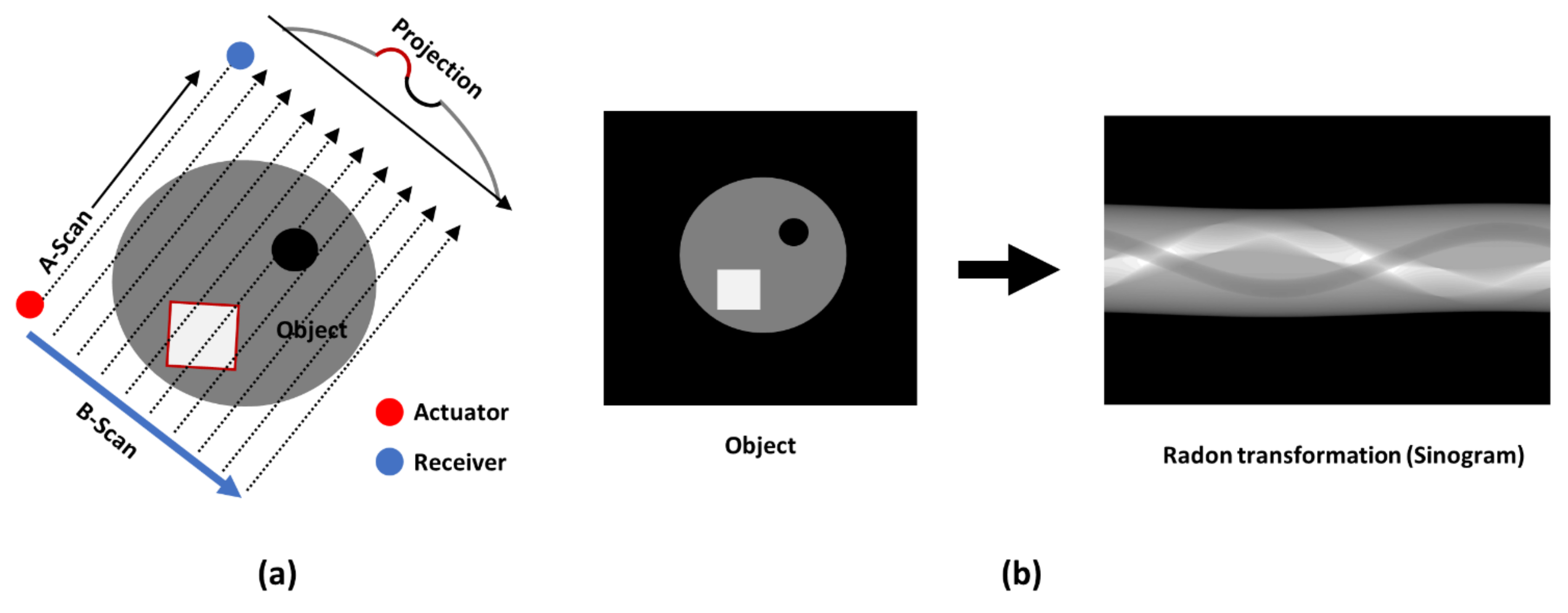
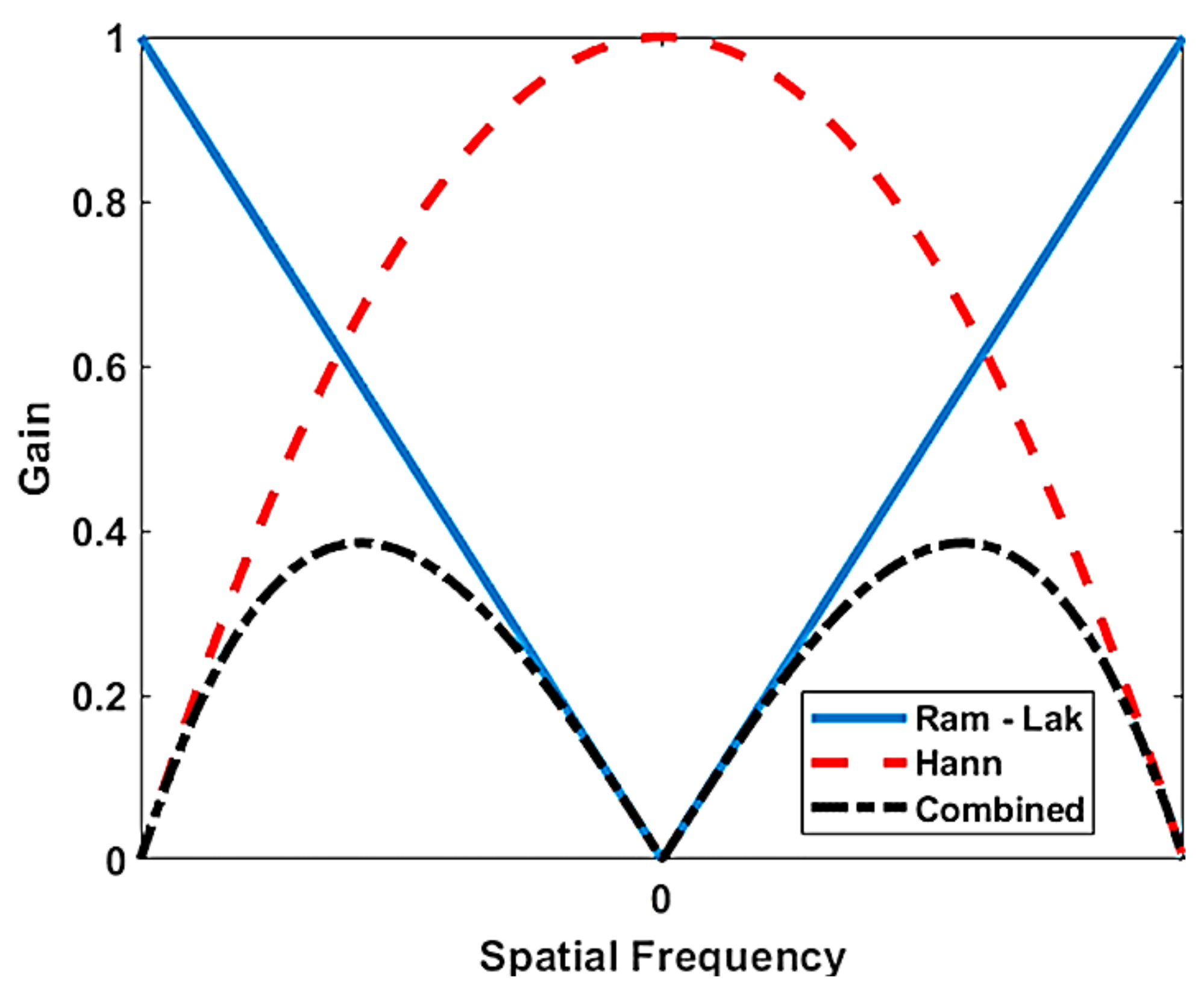
3.4. Guided Wave Tomography
4. Experimental Results and Discussion
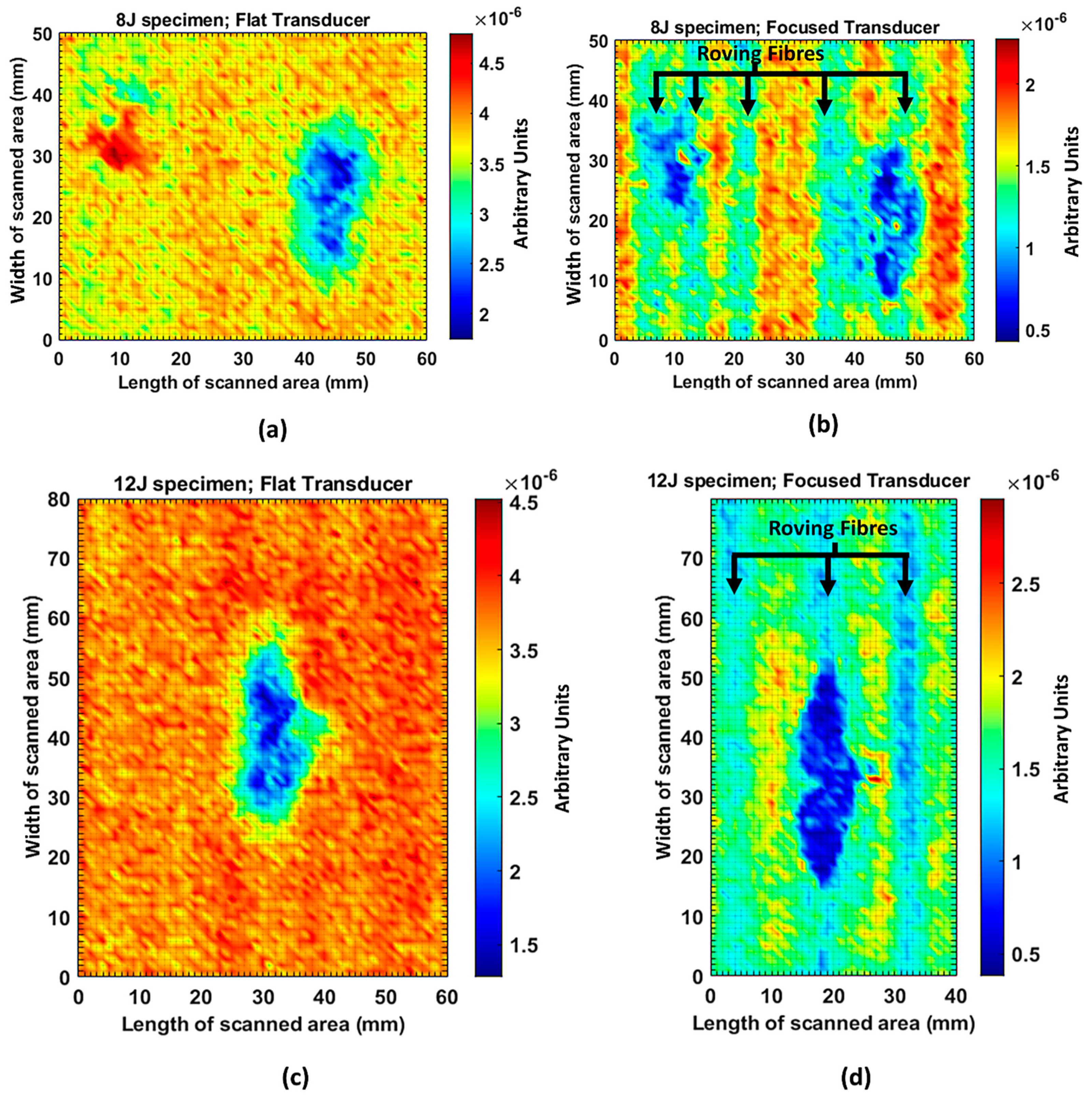
4.1. Results of the Air-Coupled through Transmission Method
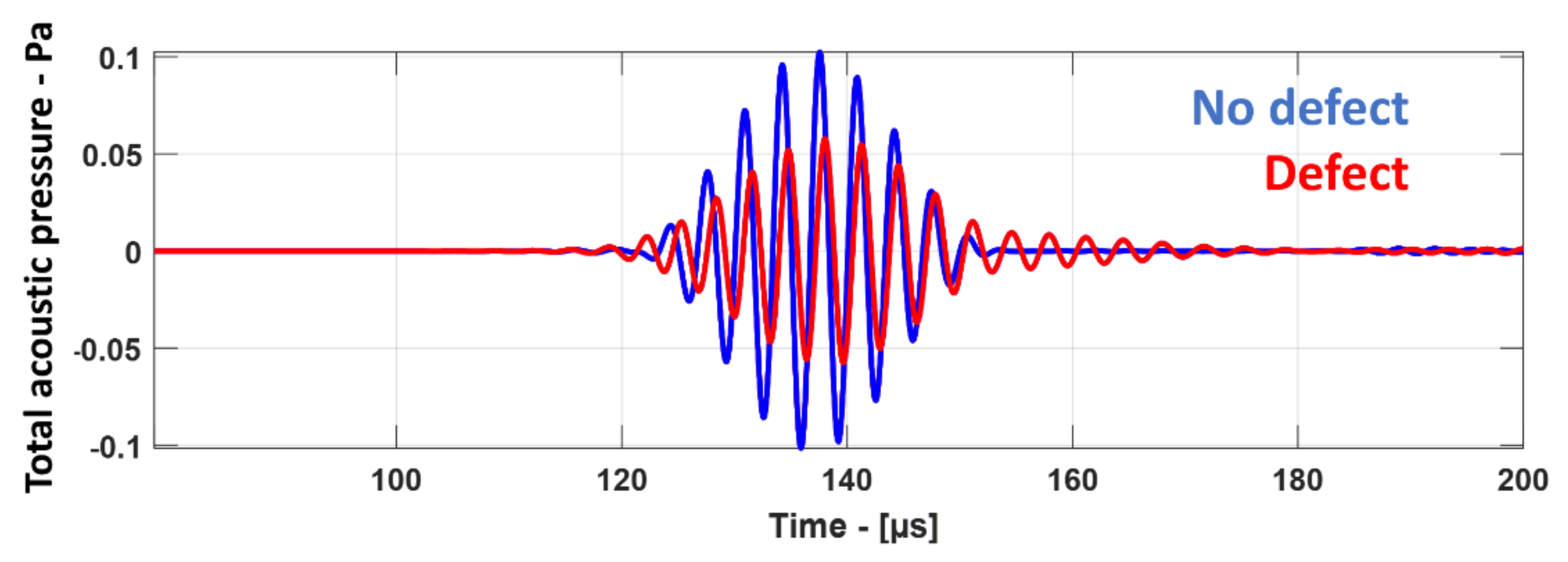
4.2. Results of Guided Wave Simulation
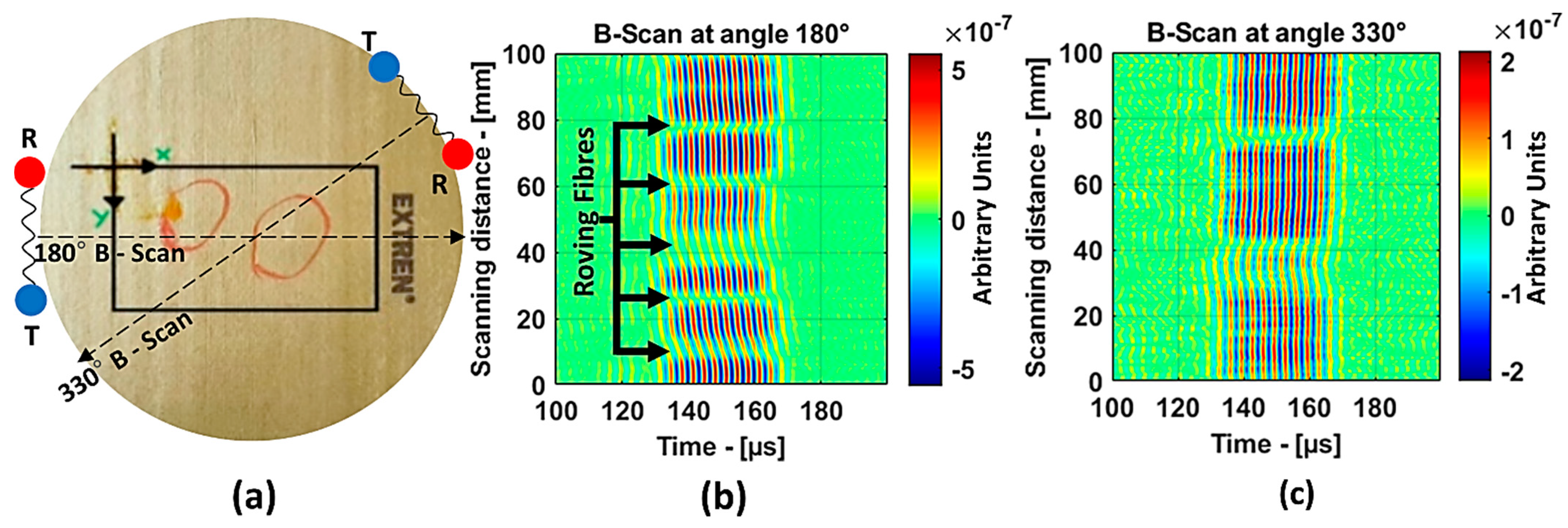
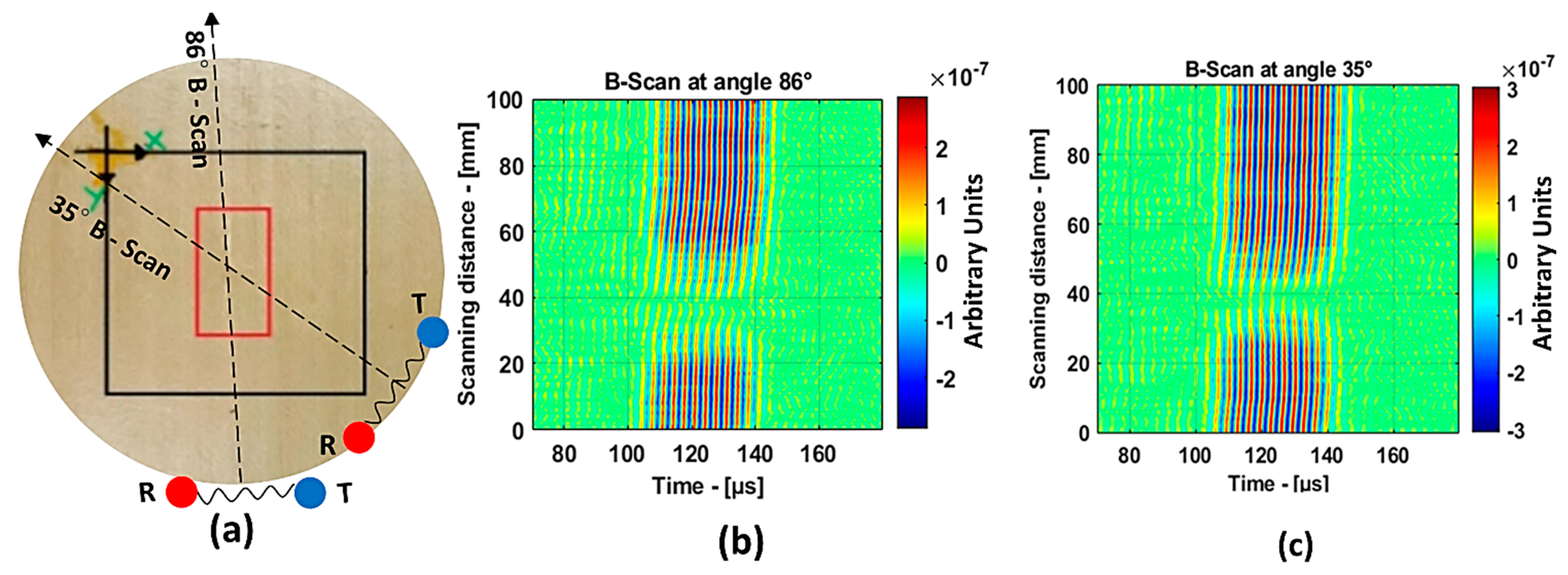
4.3. Results of Guided Wave B-Scan Technique
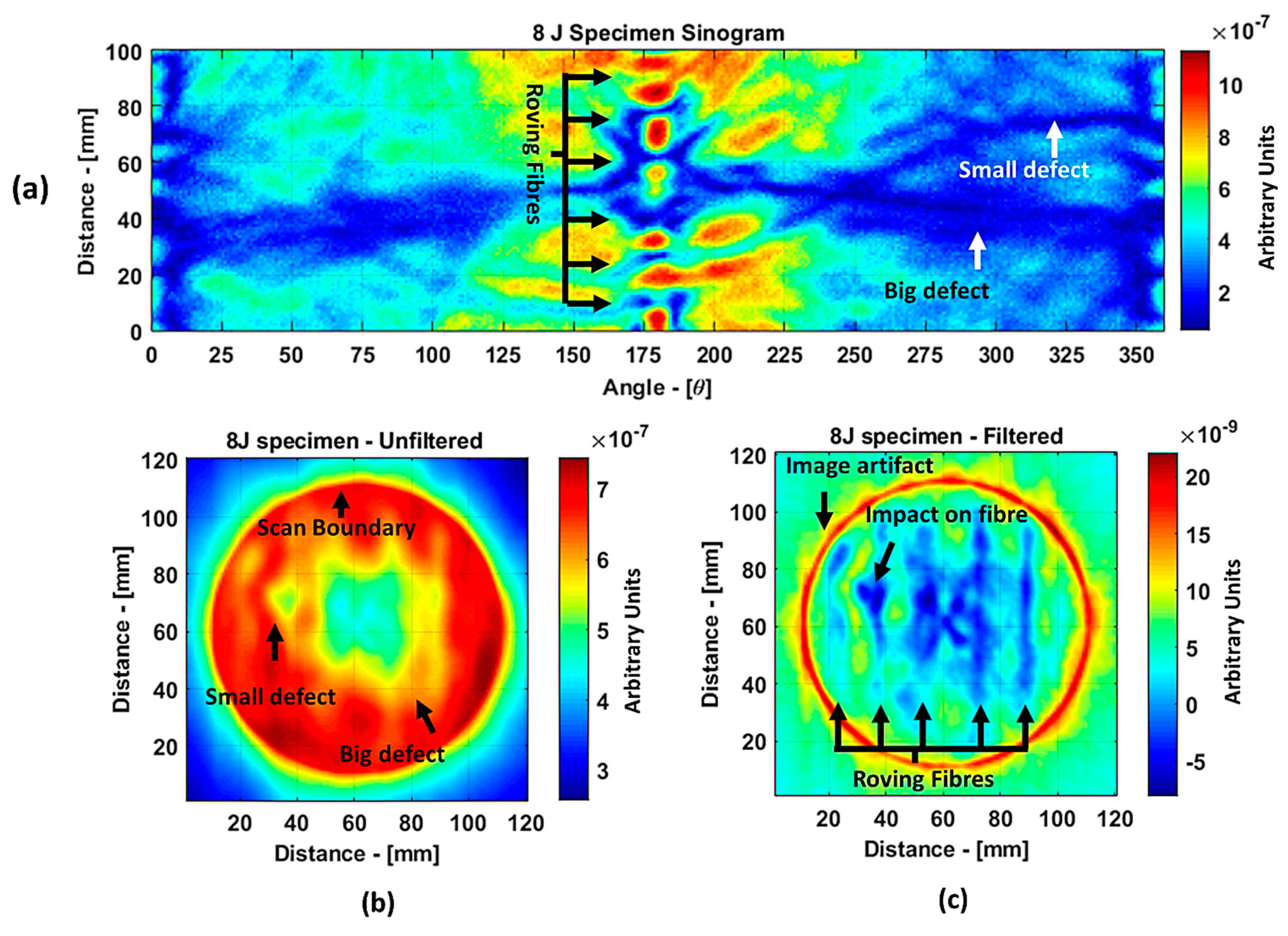
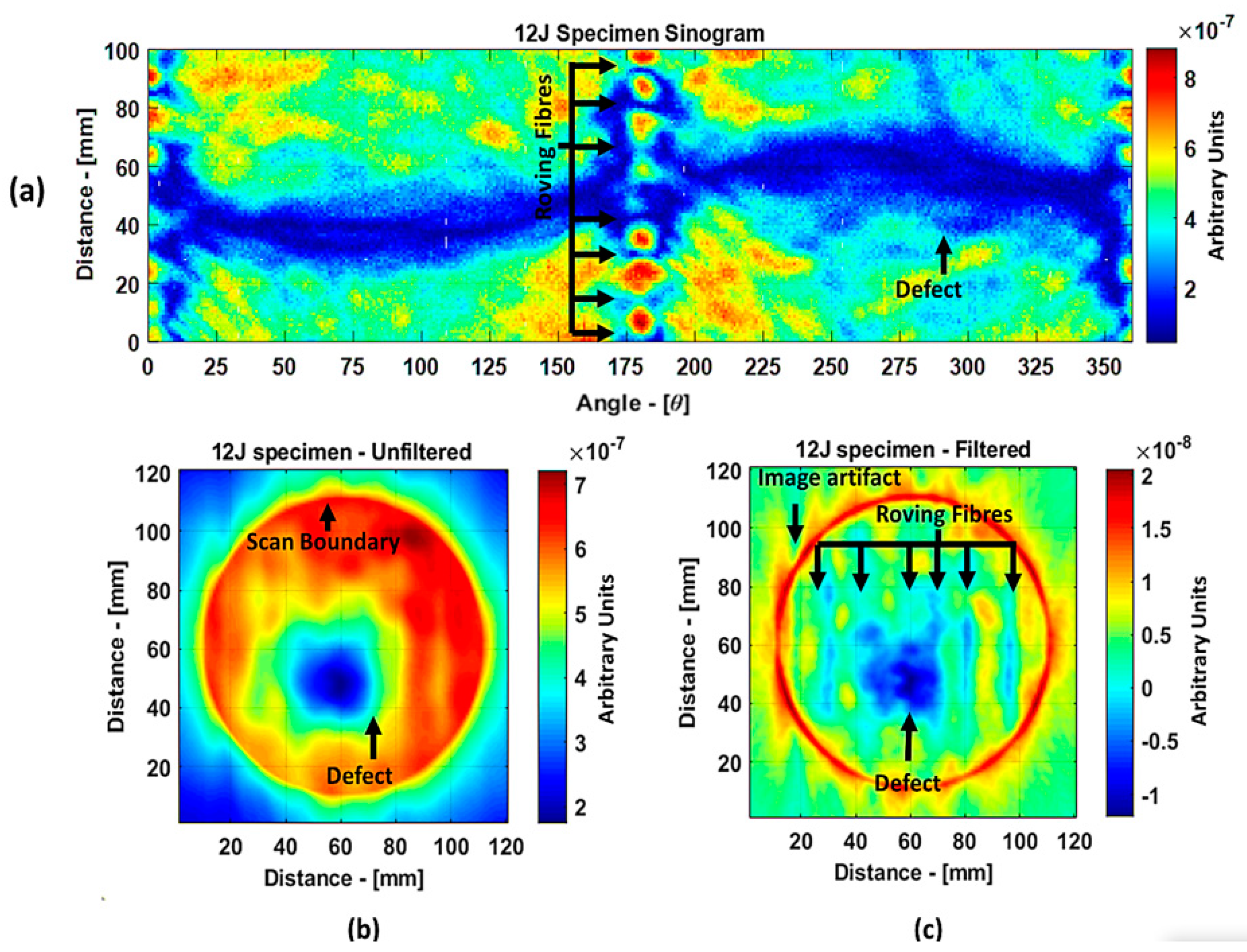
4.4. Results of Guided Wave Tomography
5. Defect Sizing and Discussion
- The results obtained using the air-coupled through transmission technique with the focused transducers showed detailed information about the impact defects in the GFRP samples, and even the internal fibers could be observed. However, in the case of the flat transducers, the internal fibers could not be identified. The defects appeared larger than in the results from the focused transducers.
- For the air-coupled guided wave investigation, the defect size could be measured, but the information about the shape of the defect could not be obtained. The size of the defect determined was relatively close to the size determined by the through transmission technique. There is a possibility of in situ inspection because it is faster (only 10 min was taken for each scan) and has the advantage of allowing one-sided inspection of the sample. The setup is quite simple.
- Using the tomographic reconstruction, the problem of the guided wave technique, where the shape of a defect was impossible to be determined, could be tackled. The guided wave tomography results showed that, with the filtered tomographic reconstruction, the location of the defect, as well as the internal roving fiber structures, with the same 300 kHz flat transducers could be determined. This result is quite impressive because this technique opens the possibility of imaging the internal structure of a sample without using higher-frequency transducers.
6. Conclusions
- The air-coupled through transmission technique can provide the highest spatial resolution of defects when using focused transducers at higher frequency (e.g., 485 kHz).
- The guided wave technique is recommended due to its ability of single-side inspection of the sample. In most cases of assembled composites structures, two-side access is not possible. In the case of the guided wave inspection, a far simpler setup can easily be used for in situ NDT.
- Numerical simulations can be of significant use to understand the effects of guided wave propagation in composite samples, mode conversions, and interaction of the guided waves with internal defects. Such simulations and results obtained by them were used to select the appropriate frequency of inspection and configuration of the experimental setup. Since multiple modes can exist at the same time in the guided wave technique, only frequencies lower than 400 kHz can be used for inspection for such specific GFRP plates.
- The through transmission technique can consume more time for inspection as the area of scan increases, while the guided wave technique can be used to inspect large areas in a single scan.
- The detectability of defects using the through transmission technique and the guided wave technique can vary because, in the first technique, the incident ultrasonic waves are perpendicular to the structure, whereas, in the second technique, the ultrasonic waves propagate parallel to the surfaces of the sample. Therefore, the orientation of a defect can influence detectability. In the case of impact defects, both techniques show good results.
- Even at lower frequencies (e.g., 300 kHz), much more detail regarding the internal structure of the GFRP plate can be revealed in the case of the guided wave tomography technique compared to the through transmission method.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, Y.; Zhu, J.; Wu, Z.; Cao, Y.; Zhao, Y.; Zhang, W. A review on the design of laminated composite structures: Constant and variable stiffness design and topology optimization. Adv. Compos. Hybrid Mater. 2018, 1, 460–477. [Google Scholar] [CrossRef]
- Mishnaevsky, L.; Branner, K.; Petersen, H.N.; Beauson, J.; McGugan, M.; Sørensen, B.F. Materials for wind turbine blades: An overview. Materials 2017, 10, 1285. [Google Scholar] [CrossRef]
- Meola, C.; Boccardi, S.; Carlomagno, G.M. Composite Materials in the Aeronautical Industry. In Infrared Thermography in the Evaluation of Aerospace Composite Materials; Woodhead Publishing: Swaston, UK, 2017; pp. 1–24. [Google Scholar]
- Vedernikov, A.; Safonov, A.; Tucci, F.; Carlone, P.; Akhatov, I. Pultruded materials and structures: A review. J. Compos. Mater. 2020, 54, 4081–4117. [Google Scholar] [CrossRef]
- Zhang, C.; Rao, Y.; Li, W. Low-velocity impact behavior of intralayer hybrid composites based on carbon and glass non-crimp fabric. Compos. Struct. 2020, 234, 111713. [Google Scholar] [CrossRef]
- Castellano, A.; Fraddosio, A.; Piccioni, M.D. Quantitative analysis of QSI and LVI damage in GFRP unidirectional composite laminates by a new ultrasonic approach. Compos. Part B Eng. 2018, 151, 106–117. [Google Scholar] [CrossRef]
- Caminero, M.A.; García-Moreno, I.; Rodríguez, G.P.; Chacón, J.M. Internal damage evaluation of composite structures using phased array ultrasonic technique: Impact damage assessment in CFRP and 3D printed reinforced composites. Compos. Part B Eng. 2019, 165, 131–142. [Google Scholar] [CrossRef]
- Castellano, A.; Fraddosio, A.; Piccioni, M.D. Ultrasonic goniometric immersion tests for the characterization of fatigue post-LVI damage induced anisotropy superimposed to the constitutive anisotropy of polymer composites. Compos. Part B Eng. 2017, 116, 122–136. [Google Scholar] [CrossRef]
- Žukauskas, E.; Kažys, R. Investigation of the delamination type defects parameters in multilayered GLARE3-3/2 composite material using air—Coupled ultrasonics technique. Ultrasound 2007, 62, 44–48. [Google Scholar]
- Balasubramaniam, K.; Whitney, S.C. Ultrasonic through-transmission characterization of thick fibre-reinforced composites. NDT E Int. 1996, 29, 225–236. [Google Scholar] [CrossRef]
- Kažys, R.; Mažeika, L.; Žukauskas, E. Investigation of accurate imaging of the defects in composite materials using ultrasonic air-coupled technique. Int. J. Mater. Prod. Technol. 2011, 41, 105–116. [Google Scholar] [CrossRef]
- Castaings, M.; Cawley, P. The generation, propagation, and detection of Lamb waves in plates using air-coupled ultrasonic transducers. J. Acoust. Soc. Am. 1996, 100, 3070–3077. [Google Scholar] [CrossRef]
- Hillger, W.; Ilse, D.; Bühling, L. Practical applications of air-coupled ultrasonic technique. In Proceedings of the 4th International Symposium on NDT in Aerospace, Augsburg, Germany, 13–15 November 2012. [Google Scholar]
- Quattrocchi, A.; Freni, F.; Montanini, R. Air-coupled ultrasonic testing to estimate internal defects in composite panels used for boats and luxury yachts. Int. J. Interact. Des. Manuf. 2020, 10, 35–41. [Google Scholar] [CrossRef]
- Bustamante, L.; Jeyaprakash, N.; Yang, C.H. Evaluation of Defect Detection in Aluminium, CFRP and Epoxy Resin Plates Using Non-contact Air-Coupled Ultrasonic Waves. Int. J. Precis. Eng. Manuf. 2020, 21, 1843–1856. [Google Scholar] [CrossRef]
- Laureti, S.; Khalid Rizwan, M.; Malekmohammadi, H.; Burrascano, P.; Natali, M.; Torre, L.; Rallini, M.; Puri, I.; Hutchins, D.; Ricci, M. Delamination detection in polymeric ablative materials using pulse-compression thermography and air-coupled ultrasound. Sensors 2019, 19, 2198. [Google Scholar] [CrossRef]
- Ma, B.; Zhou, Z.; Zhao, H.; Zhang, D.; Liu, W. Characterisation of inclusions and disbonds in honeycomb composites using non-contact non-destructive testing techniques. In Insight: Non-Destructive Testing and Condition Monitoring; The British Institute of Non-Destructive Testing: Northampton, UK, 2015. [Google Scholar]
- Raišutis, R.; Kažys, R.; Mažeika, L. Application of the ultrasonic pulse-echo technique for quality control of the multi-layered plastic materials. NDT E Int. 2008, 41, 300–311. [Google Scholar] [CrossRef]
- Raišutis, R.; Kažys, R.; Mažeika, L. Application of the ultrasonic characterization methods for highly attenuating plastic materials. NDT E Int. 2007, 40, 324–332. [Google Scholar] [CrossRef]
- Kažys, R.; Šliteris, R.; Mažeika, L.; Tumšys, O.; Žukauskas, E. Attenuation of a slow subsonic A0 mode ultrasonic guided wave in thin plastic films. Materials 2019, 12, 1648. [Google Scholar] [CrossRef] [PubMed]
- Chimenti, D.E. Review of air-coupled ultrasonic materials characterization. Ultrasonics 2014, 54, 1804–1816. [Google Scholar] [CrossRef]
- Ramadas, C.; Janardhan Padiyar, M.; Balasubramaniam, K.; Joshi, M.; Krishnamurthy, C.V. Delamination size detection using time of flight of anti-symmetric (A o) and mode converted Ao mode of guided lamb waves. J. Intell. Mater. Syst. Struct. 2010, 21, 817–825. [Google Scholar] [CrossRef]
- Wright, W.; Hutchins, D.; Jansen, D.; Schindel, D. Air-coupled lamb wave tomography. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1997, 44, 53–59. [Google Scholar] [CrossRef] [PubMed]
- Jansen, D.P.; Hutchins, D.A.; Mottram, J.T. Lamb wave tomography of advanced composite laminates containing damage. Ultrasonics 1994, 32, 83–90. [Google Scholar] [CrossRef]
- Hall, K.S.; Popovics, J.S. Air-coupled ultrasonic tomography of solids: 1 Fundamental development. Smart Struct. Syst. 2016, 17, 17–29. [Google Scholar] [CrossRef]
- Zhao, X.; Royer, R.L.; Owens, S.E.; Rose, J.L. Ultrasonic Lamb wave tomography in structural health monitoring. Smart Mater. Struct. 2011, 20, 105002. [Google Scholar] [CrossRef]
- Soma Sekhar, B.V.; Balasubramaniam, K.; Krishnamurthy, C.V. Structural health monitoring of fiber-reinforced composite plates for low-velocity impact damage using ultrasonic Lamb wave tomography. Struct. Health Monit. 2006, 5, 243–253. [Google Scholar] [CrossRef]
- Prasad, S.M.; Balasubramaniam, K.; Krishnamurthy, C.V. Structural health monitoring of composite structures using Lamb wave tomography. Smart Mater. Struct. 2004, 13, N73–N79. [Google Scholar] [CrossRef]
- Camassa, D.; Castellano, A.; Fraddosio, A.; Piccioni, M.D. A New Ultrasonic Amplitude Tomography Approach, with Validation on Masonry Tuff Blocks. J. Nondestruct. Eval. 2020, 39, 1–19. [Google Scholar] [CrossRef]
- Park, J.; Lee, J.; Le, Z.; Cho, Y. High-precision noncontact guided wave tomographic imaging of plate structures using a DHB algorithm. Appl. Sci. 2020, 10, 4360. [Google Scholar] [CrossRef]
- Mažeika, L.; Raišutis, R.; Maciulevičius, A. Comparison of several techniques of ultrasonic Lamb waves velocities measurements. Ultragarsas 2009, 64, 11–17. [Google Scholar]
- Marhenke, T.; Neuenschwander, J.; Furrer, R.; Zolliker, P.; Twiefel, J.; Hasener, J.; Wallaschek, J.; Sanabria, S.J. Air-Coupled Ultrasound Time Reversal (ACU-TR) for Subwavelength Nondestructive Imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2020, 67, 651–663. [Google Scholar] [CrossRef]
- Haj-Ali, R.; Kilic, H. Nonlinear behavior of pultruded FRP composites. Compos. Part B Eng. 2002, 33, 173–191. [Google Scholar] [CrossRef]
- Xin, H.; Liu, Y.; Mosallam, A.S.; He, J.; Du, A. Evaluation on material behaviors of pultruded glass fiber reinforced polymer (GFRP) laminates. Compos. Struct. 2017, 182, 283–300. [Google Scholar] [CrossRef]
- Arshad, I. Determination of Elastic Constants of Pultruded Fibre Reinforced Polymer Closed Sections—Experimental Campaign; Coventry University: Conventry, UK, 2015. [Google Scholar]
- Oprişan, G.; Ţăranu, N.; Mihai, P.; Popoaei, S.; Enţuc, I.S. Stiffness Properties Along Principal Material Axes of Fibre Reinforced Polyester Pultruded Plate Elements. Bul. Inst. Politeh. Sect. Constr. Arhit. 2013, 59, 55–64. [Google Scholar]
- Nečiūnas, A. Algorithms of Numerical Simulation of Elastic Waves Propagating in Dissipative Environments; Kauno Technologijos Universitetas: Kaunas, Lithuania, 2018. [Google Scholar]
- Samaitis, V.; Mažeika, L.; Rekuviene, R. Assessment of the length and depth of delamination-type defects using ultrasonic guided waves. Appl. Sci. 2020, 10, 5236. [Google Scholar] [CrossRef]
- Tian, Z.; Yu, L.; Leckey, C.A.C. Guided wave propagation study on laminated composites by frequency-wavenumber technique. Nondestruct. Charact. Compos. Mater. Aerosp. Eng. Civ. Infrastruct. Homel. Secur. 2014, 9063, O1–O11. [Google Scholar] [CrossRef]
- Ghose, B.; Balasubramaniam, K.; Krishnamurthy, C.V.; Rao, A.S. Two dimensional FEM simulation of ultrasonic wave propagation in isotropic Solid Media using COMSOL. In Proceedings of the COMSOL Conference, Boston, MA, USA, 7–9 October 2010. [Google Scholar]
- Duczek, S.; Joulaian, M.; Düster, A.; Gabbert, U. Numerical analysis of Lamb waves using the finite and spectral cell methods. Int. J. Numer. Methods Eng. 2014, 99, 26–53. [Google Scholar] [CrossRef]
- Kak, A.C.; Slaney, M.; Wang, G. Principles of Computerized Tomographic Imaging. Med. Phys. 2002, 29, 107. [Google Scholar] [CrossRef]
- Armeanu, C. Image reconstruction with back filtered projection algorithms, used in cultural heritage investigations. Rom. Rep. Phys. 2017, 69, 405. [Google Scholar]
- Yue, G.; Cui, X.; Zhang, K.; Wang, Z.; An, D. Guided Wave Propagation for Monitoring the Rail Base. Math. Probl. Eng. 2020, 2020, 1–11. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Young Module (GPa) | Poisson Ratio (−) | Density (kg·m−3) |
|---|---|---|---|
| Vinyl ester | 3.59 | 0.38 | 1200 |
| E-Glass | 72.35 | 0.22 | 2620 |
| 8 J Impact Defect 1 | Defect Size (−6 dB) | 8 J Impact Defect 2 | Defect Size (−6 dB) | |
|---|---|---|---|---|
| Original Specimen |  | 5 × 5 mm2 |  | 10 × 15 mm2 |
|
300 kHz
Unfocused through Transmission C-Scan |  | 12 × 6 mm2 |  | 21 × 16 mm2 |
|
485 kHz Focused through Transmission C-Scan |  | 18 × 11 mm2 |  | 26 × 13 mm2 |
|
300 kHz
Guided Wave B-Scan θ = 330° |  | 10 mm2 |  | 22 mm2 |
|
300 kHz Guided Wave Tomography Unfiltered |  | 8 × 8 mm2 |  | 38 × 34 mm2 |
|
300 kHz Guided Wave Tomography Filtered |  | 11 × 12 mm2 |  | 37 × 32 mm2 |
| 12 J Impact Defect | Defect Size (−6 dB) | |
|---|---|---|
|
Original Specimen |  | 25 × 13 mm2 |
|
300 kHz Unfocused through Transmission C-Scan |  | 27 × 12 mm2 |
|
485 kHz Focused through Transmission C-Scan |  | 33 × 10 mm2 |
|
300 kHz Guided Wave B-Scan |  | θ = 86° 10 mm (length) θ = 35° 22 mm (width) |
|
300 kHz Guided Wave Tomography Unfiltered |  | 22 × 34 mm2 |
|
300 kHz Guided Wave Tomography Filtered |  | 36 × 32 mm2 |
| Air-Coupled through Transmission | Air-Coupled Guided Waves | |||
|---|---|---|---|---|
| Flat Transducersat 300 kHz | Focused Transducersat 485 kHz | Guided Wave B-Scan | Guided Wave Tomography | |
| Capabilities and advantages | Contactless coupling; approximate representation of defect; easy transducer placement. | Contactless coupling; focused beams; accurate representation of defect size. | The ability of fast inspection; single-sided inspection; simple and portable experimental setup. | Ability to see internal structural details even at lower frequency; a large area of coverage. |
| Limitations | The requirement for two-side access to the structure; nonportable experimental setup. | The requirement for two-side access to the structure; difficult to focus the transducers; nonportable experimental setup. | Low signal-to-noise ratio (SNR) which can be improved by averaging and adjusting the orientation angle of the transducers. | The same limitations as of the guided wave technique and complex experimental setup. |
| Resolution of defect sizing | Has a wavelength of 12 mm; however, for plate-like structures, defects can be identified as small as 4 mm, as seen from 8 J specimen results. | Even though the wavelength at 485 kHz is 7.5 mm, defects as small as 1 mm can be identified due to smaller focal diameter. | Good for detection of defects bigger than 5 mm due to the wavelength being 4.7 mm at 300 kHz. | Good for defects with a size bigger than 5 mm due to the wavelength being 4.7 mm at 300 kHz. |
| Time consumption | 3.3 h for the area of 60 × 50 mm2. | 3.3 h for the area of 60 × 50 mm2. | Practically requires a few minutes for 100 mm scan. | The most time-consuming scan takes about 2.5 days for a 100 × 100 mm2 area scan. |
| Recommendation for in situ inspection | Less favorable due to low resolution. | A less favorable but better choice than unfocused transducers. | More favorable for fast and coarse scanning due to one-sided inspection. | Recommended if time is not a constraint. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Asokkumar, A.; Jasiūnienė, E.; Raišutis, R.; Kažys, R.J. Comparison of Ultrasonic Non-Contact Air-Coupled Techniques for Characterization of Impact-Type Defects in Pultruded GFRP Composites. Materials 2021, 14, 1058. https://doi.org/10.3390/ma14051058
Asokkumar A, Jasiūnienė E, Raišutis R, Kažys RJ. Comparison of Ultrasonic Non-Contact Air-Coupled Techniques for Characterization of Impact-Type Defects in Pultruded GFRP Composites. Materials. 2021; 14(5):1058. https://doi.org/10.3390/ma14051058
Chicago/Turabian StyleAsokkumar, Aadhik, Elena Jasiūnienė, Renaldas Raišutis, and Rymantas Jonas Kažys. 2021. "Comparison of Ultrasonic Non-Contact Air-Coupled Techniques for Characterization of Impact-Type Defects in Pultruded GFRP Composites" Materials 14, no. 5: 1058. https://doi.org/10.3390/ma14051058
APA StyleAsokkumar, A., Jasiūnienė, E., Raišutis, R., & Kažys, R. J. (2021). Comparison of Ultrasonic Non-Contact Air-Coupled Techniques for Characterization of Impact-Type Defects in Pultruded GFRP Composites. Materials, 14(5), 1058. https://doi.org/10.3390/ma14051058