
Damage Detection at a Reinforced Concrete Specimen with Coda Wave Interferometry

 , , , , and
, , , , and
Abstract
:1. Introduction
2. Ultrasound Methods
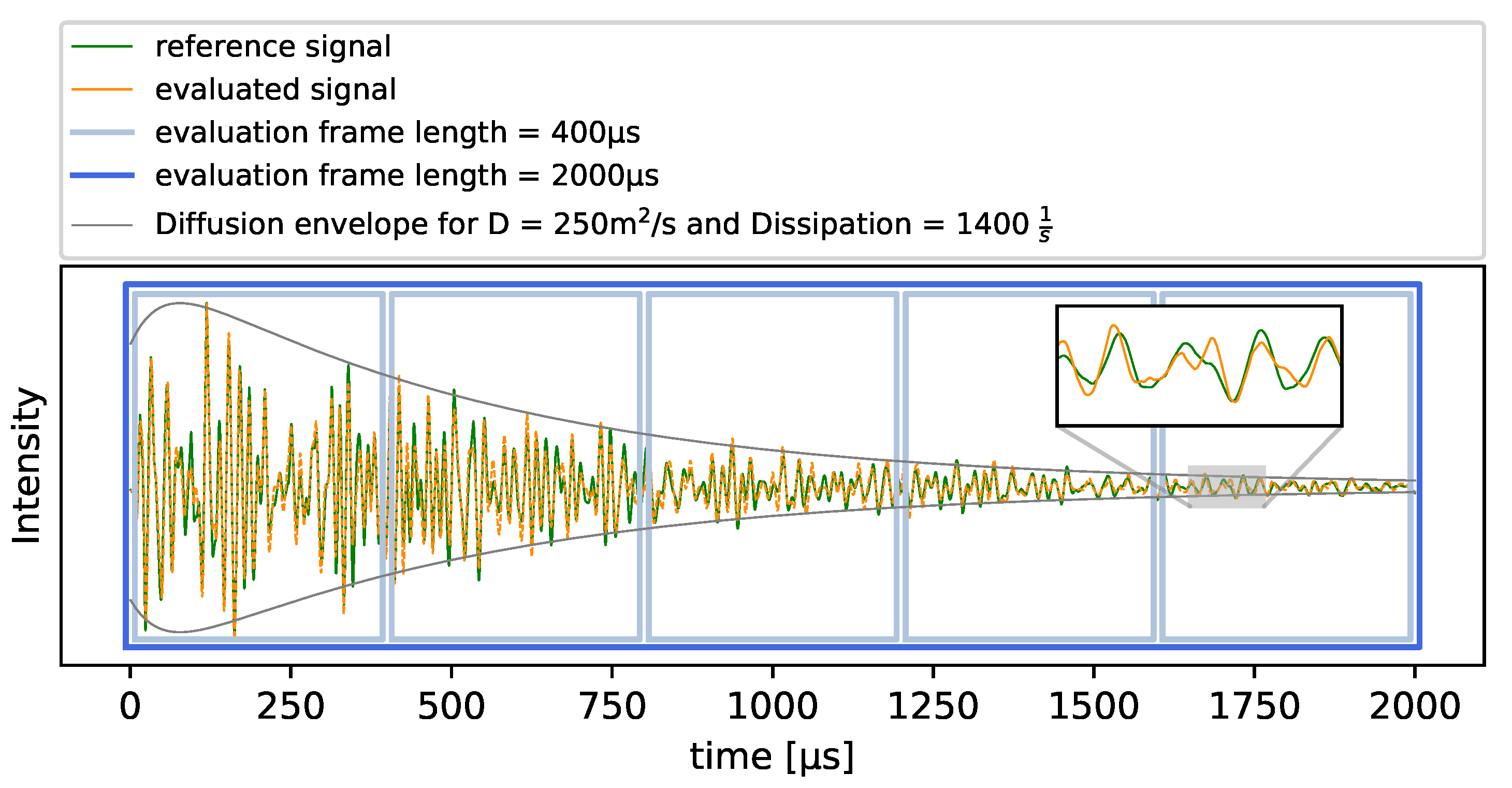
2.1. Basics
2.2. Diffusion Approximation
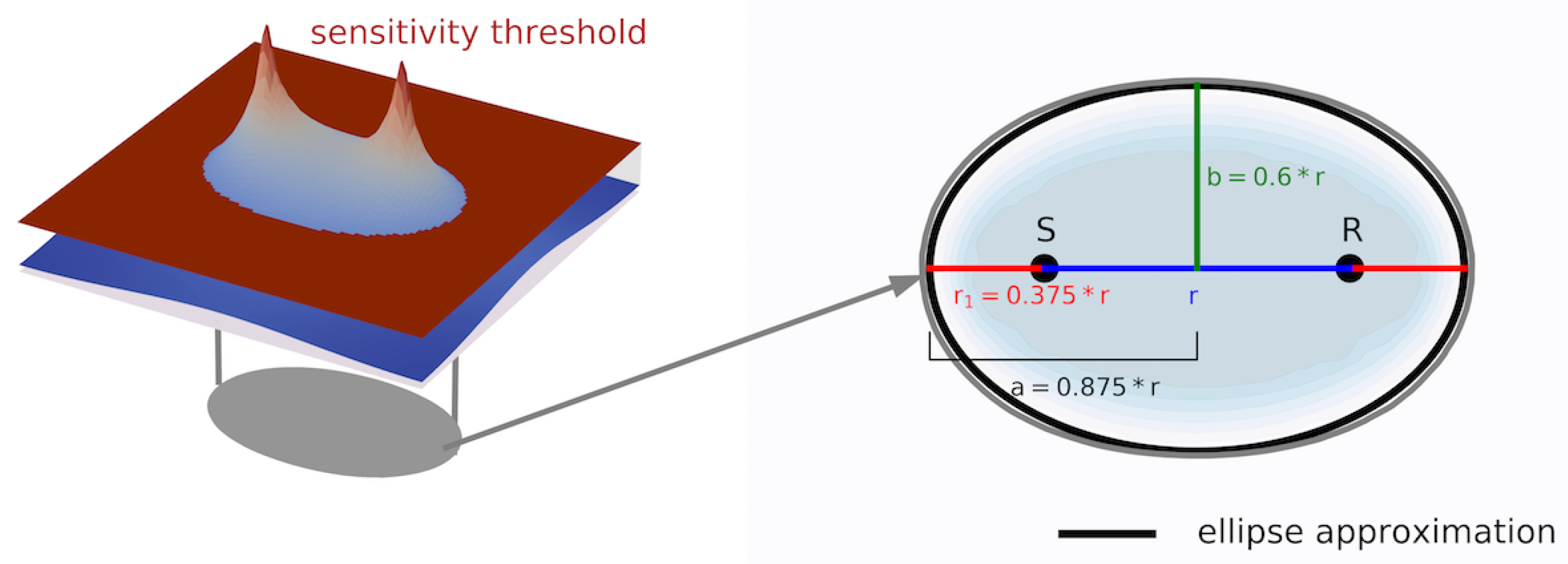
2.3. Sensitivity Kernel
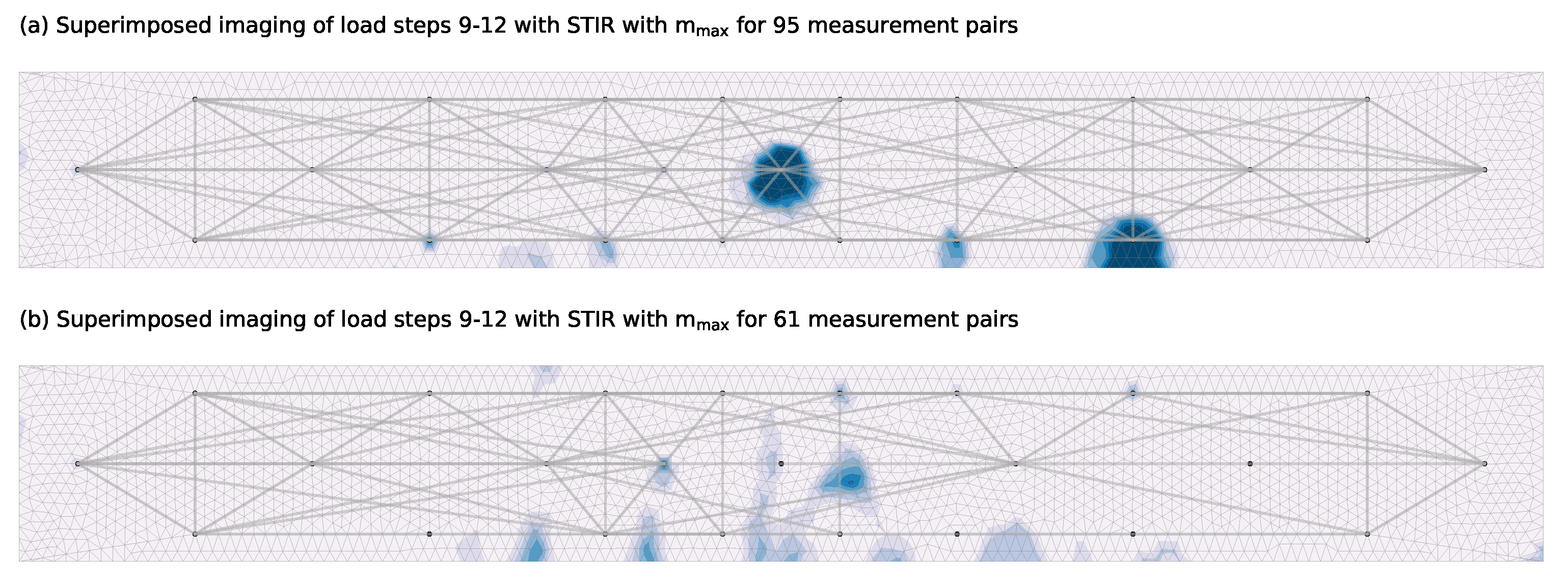
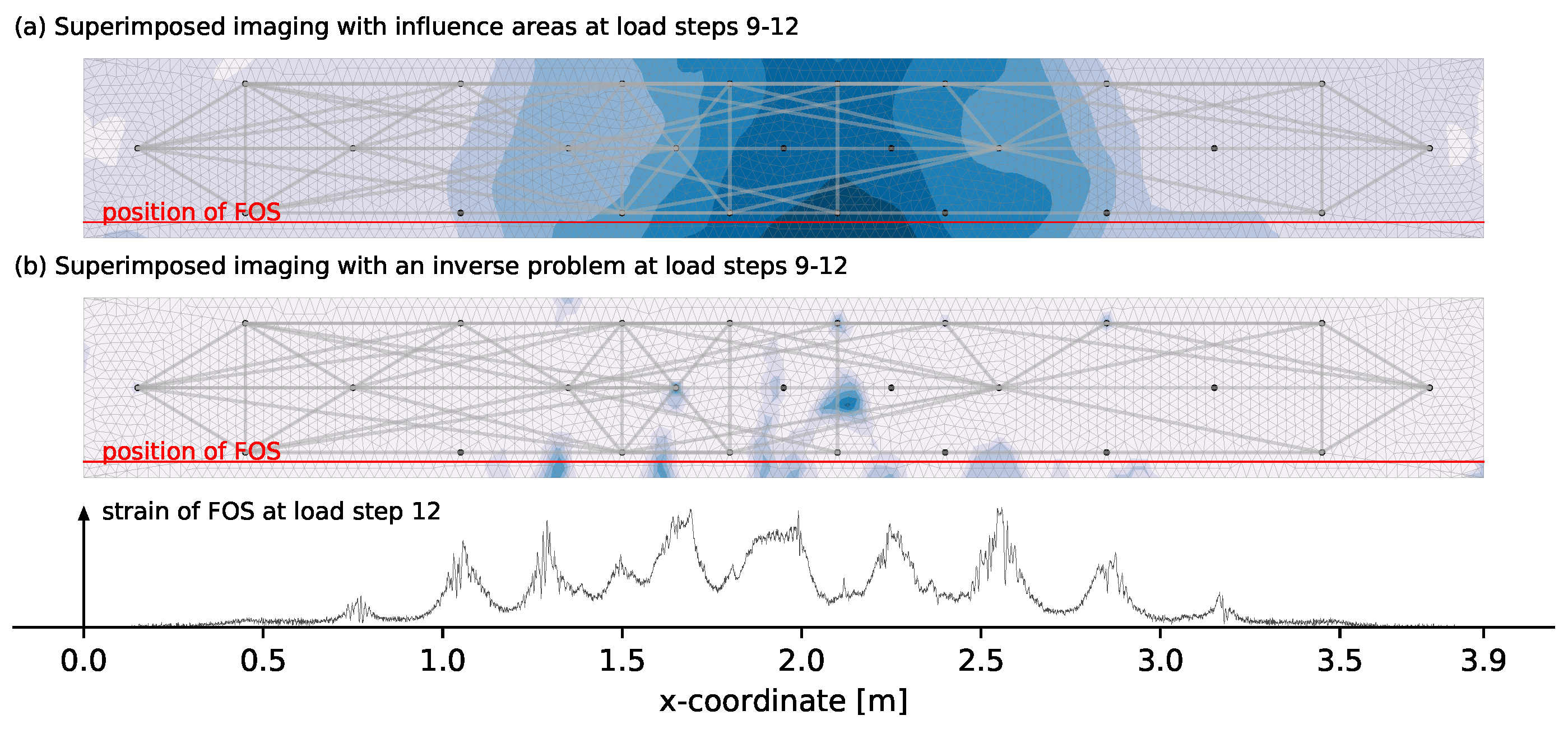
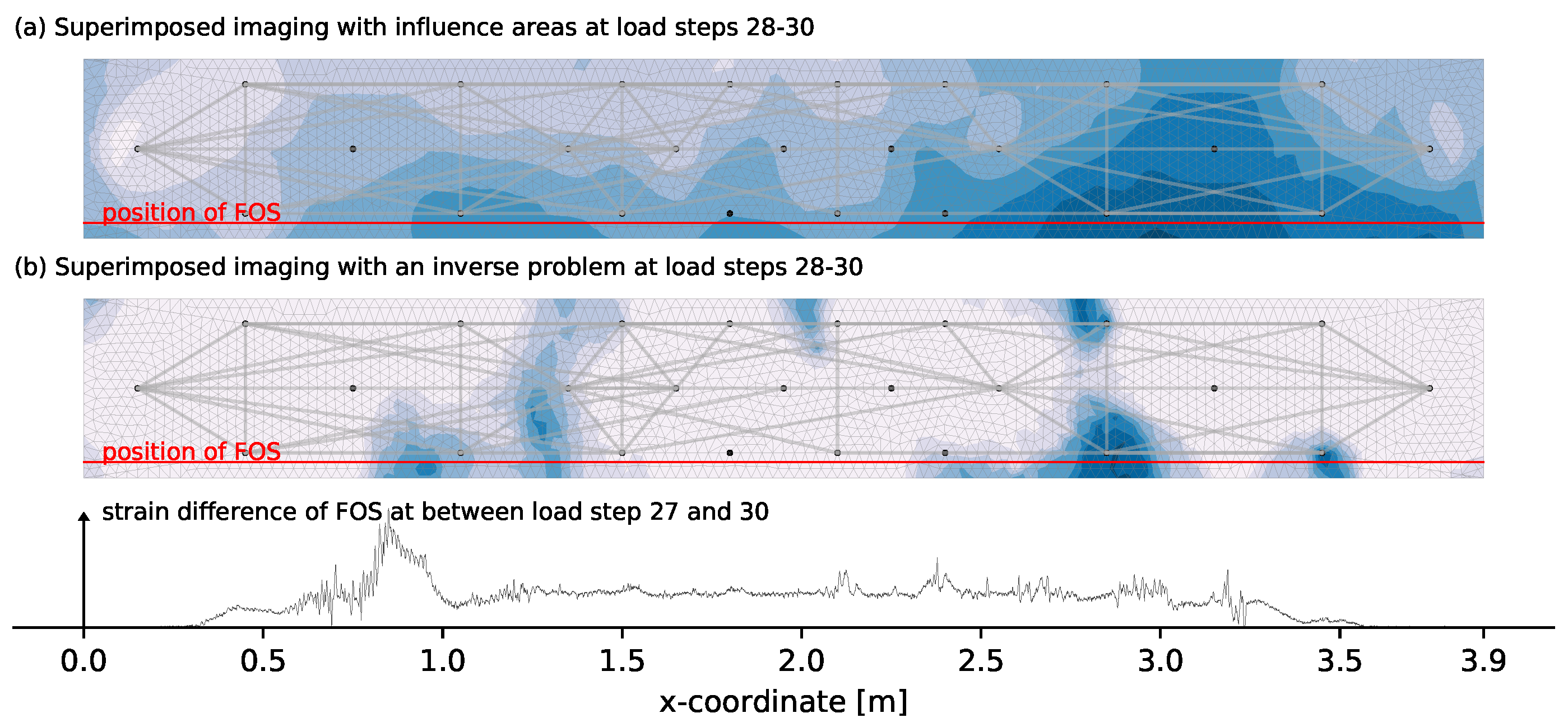
2.4. Imaging with an Inverse Problem
2.5. Imaging with Influence Areas
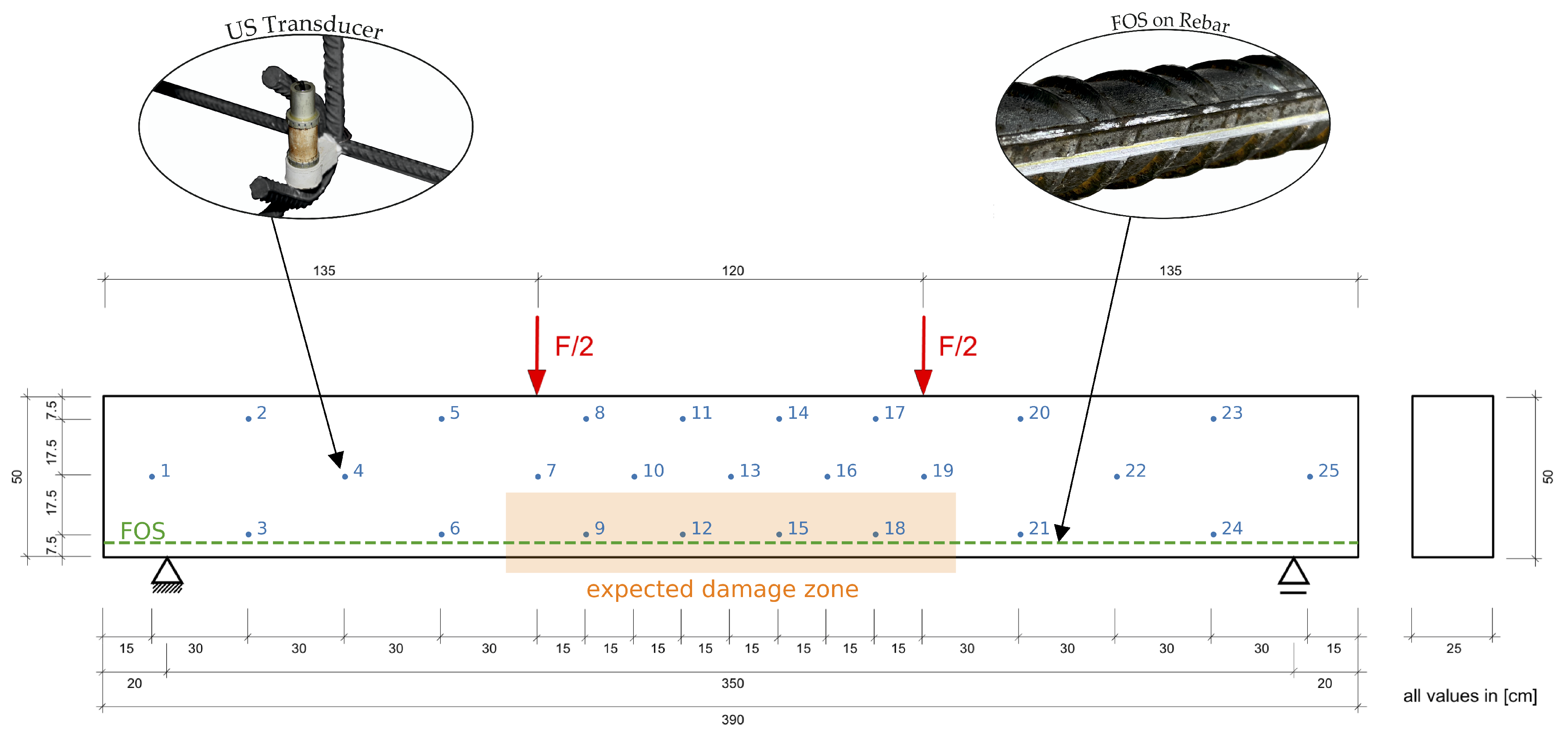
3. Experiment
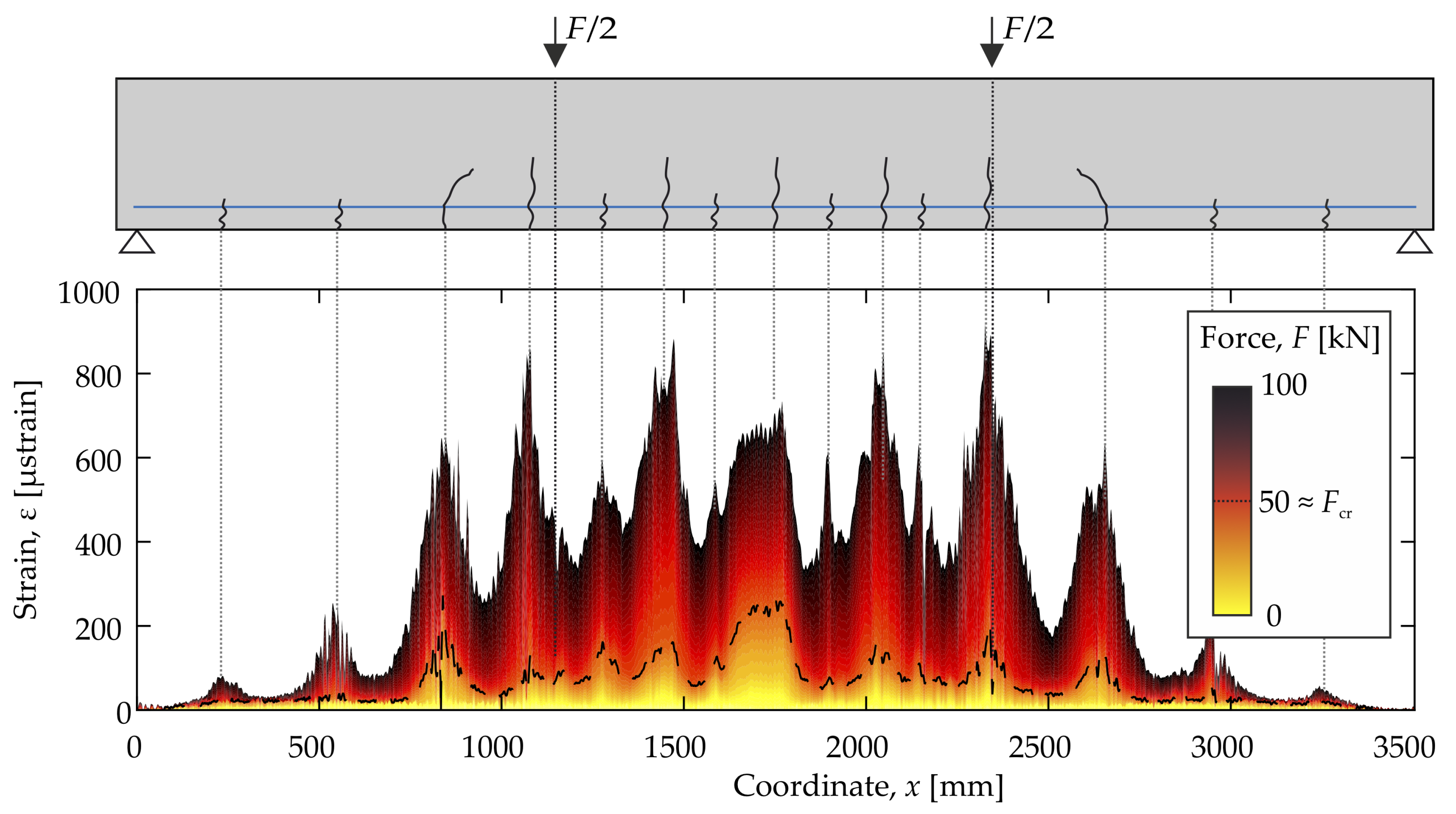
4. Results
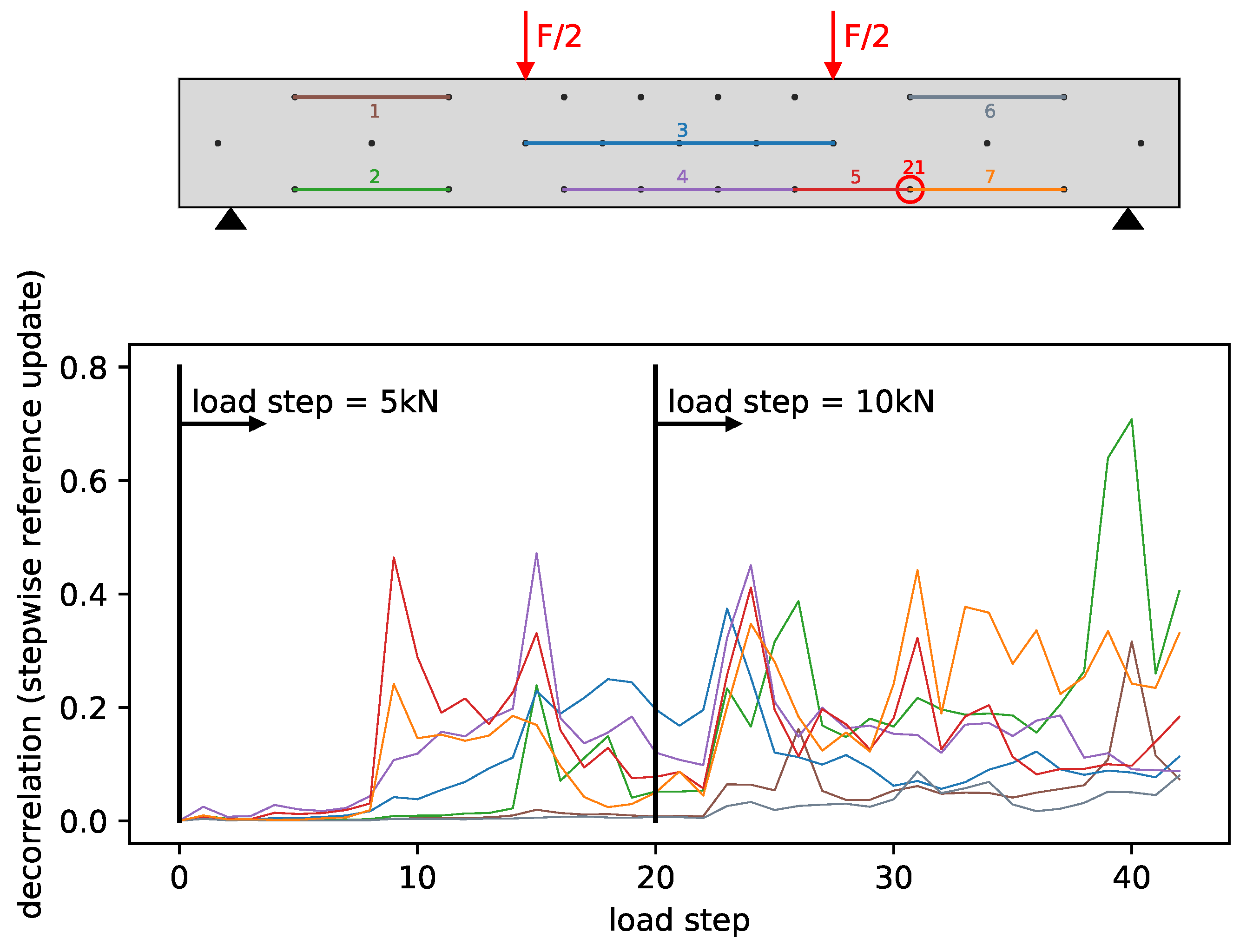
4.1. Decorrelation Investigations on Selected Measurement Pairs
4.1.1. Pair 1 and 6
4.1.2. Pair 3 and 4
4.1.3. Pair 5 and 7
4.2. CWI Damage Localization
4.2.1. State 1: Uncracked
4.2.2. State 2: Crack Formation
4.2.3. State 3: Cracked
5. Discussion
5.1. Overall Discussion with an Outlook to General Improvements
5.2. Crack Detection and Related Challenges
5.3. Comparison of Imaging Approaches
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CWI | Coda Wave Interferometry |
| CC | Cross-Correlation Coefficient |
| DC | Decorrelation coefficient |
| FOS | Fibre Optic Sensor |
| FE | Finite Elements |
References
- Larose, E.; Hall, S. Monitoring stress related velocity variation in concrete with a 2.10−5 relative resolution using diffuse ultrasound. J. Acoust. Soc. Am. 2009, 125, 1853–1856. [Google Scholar] [CrossRef] [Green Version]
- Planès, T.; Larose, E. A review of ultrasonic Coda Wave Interferometry in concrete. Cem. Concr. Res. 2013, 53, 248–255. [Google Scholar] [CrossRef]
- Larose, E.; Obermann, A.; Digulescu, A.; Planès, T.; Chaix, J.F.; Mazerolle, F.; Moreau, G. Locating and characterizing a crack in concrete with diffuse ultrasound: A four-point bending test. J. Acoust. Soc. Am. 2015, 138, 232–241. [Google Scholar] [CrossRef]
- Zhang, Y.; Planès, T.; Larose, E.; Obermann, A.; Rospars, C.; Moreau, G. Diffuse ultrasound monitoring of stress and damage development on a 15-ton concrete beam. J. Acoust. Soc. Am. 2016, 139, 1691–1701. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, Y.; Larose, E.; Moreau, L.; d’Ozouville, G. Three-dimensional in situ imaging of cracks in concrete using diffuse ultrasound. Struct. Health Monit. 2017, 17, 279–284. [Google Scholar] [CrossRef] [Green Version]
- Zhan, H.; Jiang, H.; Jiang, R. Three-dimensional images generated from diffuse ultrasound wave: Detections of multiple cracks in concrete structures. Struct. Health Monit. 2019, 19, 12–25. [Google Scholar] [CrossRef]
- Jiang, H.; Zhan, H.; Ma, Z.; Jiang, R. Comparative Study of Three-Dimensional Stress and Crack Imaging in Concrete by Application of Inverse Algorithms to Coda Wave Measurements. Sensors 2020, 20, 4899. [Google Scholar] [CrossRef] [PubMed]
- Niederleithinger, E.; Wang, X.; Herbrand, M.; Müller, M. Processing Ultrasonic Data by Coda Wave Interferometry to Monitor Load Tests of Concrete Beams. Sensors 2018, 18, 1971. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Niederleithinger, E. Coda Wave Interferometry Used to Detect Loads and Cracks in a Concrete Structure Under Field Conditions. In Proceedings of the 9th European Workshop on Structural Health Monitoring Series, Manchester, UK, 10–13 July 2018. [Google Scholar] [CrossRef]
- Wang, X.; Niederleithinger, E.; Chakraborty, J.; Klikowicz, P. Monitoring a concrete bridge girder with the coda wave interferometry method. In Proceedings of the 5th International Conference on Smart Monitoring, Assessment and Rehabilitation of Civil Structures, Potsdam, Germany, 27–29 August 2019. [Google Scholar] [CrossRef]
- Wang, X.; Chakraborty, J.; Bassil, A.; Niederleithinger, E. Detection of Multiple Cracks in Four-Point Bending Tests Using the Coda Wave Interferometry Method. Sensors 2020, 20, 1986. [Google Scholar] [CrossRef] [Green Version]
- Zhan, H.; Jiang, H.; Zhang, J.; Jiang, R. Condition Evaluation of an Existing T-Beam Bridge Based on Neutral Axis Variation Monitored with Ultrasonic Coda Waves in a Network of Sensors. Sensors 2020, 20, 3895. [Google Scholar] [CrossRef]
- Hafiz, A.; Schumacher, T. Monitoring of Stresses in Concrete Using Ultrasonic Coda Wave Comparison Technique. J. Nondestruct. Eval. 2018, 37. [Google Scholar] [CrossRef]
- Fröjd, P.; Ulriksen, P. Frequency selection for coda wave interferometry in concrete structures. Ultrasonics 2017, 80, 1–8. [Google Scholar] [CrossRef]
- Wunderlich, C.; Niederleithinger, E. Evaluation of Temperature Influence on Ultrasound Velocity in Concrete by Coda Wave Interferometry. In Nondestructive Testing of Materials and Structures; Springer: Dordrecht, The Netherlands, 2011; pp. 227–232. [Google Scholar] [CrossRef]
- Ju, T.; Li, S.; Achenbach, J.; Qu, J. Effects of moisture on ultrasound propagation in cement mortar. AIP Conf. Proc. 2015, 1650, 1409–1414. [Google Scholar] [CrossRef]
- Lillamand, I.; Chaix, J.F.; Ploix, M.A.; Garnier, V. Acoustoelastic effect in concrete material under uni-axial compressive loading. NDT & E Int. 2010, 43, 655–660. [Google Scholar] [CrossRef]
- Larose, E.; Planes, T.; Rossetto, V.; Margerin, L. Locating a small change in a multiple scattering environment. Appl. Phys. Lett. 2010, 96, 204101. [Google Scholar] [CrossRef] [Green Version]
- Priestley, M.B. Spectral Analysis and Time Series; Academic Press: London, UK; New York, NY, USA, 1981; Chapter 9; p. 704. [Google Scholar]
- Roberts, P.M.; Phillips, W.S.; Fehler, M.C. Development of the active doublet method for measuring small velocity and attenuation changes in solids. J. Acoust. Soc. Am. 1992, 91, 3291–3302. [Google Scholar] [CrossRef]
- Sens-Schönfelder, C.; Wegler, U. Passive image interferometry and seasonal variations of seismic velocities at Merapi Volcano, Indonesia. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Ryzhik, L.; Papanicolaou, G.; Keller, J.B. Transport equations for elastic and other waves in random media. Wave Motion 1996, 24, 327–370. [Google Scholar] [CrossRef] [Green Version]
- Pacheco, C.; Snieder, R. Time-lapse travel time change of multiply scattered acoustic waves. J. Acoust. Soc. Am. 2005, 118, 1300–1310. [Google Scholar] [CrossRef] [Green Version]
- Planès, T.; Larose, E.; Rossetto, V.; Margerin, L. Imaging multiple local changes in heterogeneous media with diffuse waves. J. Acoust. Soc. Am. 2015, 137, 660–667. [Google Scholar] [CrossRef] [PubMed]
- Branch, M.A.; Coleman, T.F.; Li, Y. A Subspace, Interior, and Conjugate Gradient Method for Large-Scale Bound-Constrained Minimization Problems. SIAM J. Sci. Comput. 1999, 21, 1–23. [Google Scholar] [CrossRef]
- Konertz, D.; Löschmann, J.; Clauß, F.; Mark, P. Fiber optic sensors for continuous strain measurement in concrete. Bauingenieur 2019, 94, 292–300. (In German) [Google Scholar] [CrossRef]
- Clauß, F.; Epple, N.; Ahrens, M.A.; Niederleithinger, E.; Mark, P. Comparison of Experimentally Determined Two-Dimensional Strain Fields and Mapped Ultrasonic Data Processed by Coda Wave Interferometry. Sensors 2020, 20, 4023. [Google Scholar] [CrossRef]
- Clauß, F.; Ahrens, M.A.; Mark, P. A Comparative Evaluation of Strain Measurement Techniques in Reinforced Concrete Structures—A Discussion of Assembly, Application, and Accuracy. Struct. Concr. 2021. [Google Scholar] [CrossRef]
- Wang, X.; Chakraborty, J.; Niederleithinger, E. Noise Reduction for Improvement of Ultrasonic Monitoring Using Coda Wave Interferometry on a Real Bridge. J. Nondestruct. Eval. 2021, 40. [Google Scholar] [CrossRef]
- Fröjd, P.; Ulriksen, P. Continuous wave measurements in a network of transducers for structural health monitoring of a large concrete floor slab. Struct. Health Monit. 2016, 15, 403–412. [Google Scholar] [CrossRef] [Green Version]
- Fröjd, P.; Ulriksen, P. Detecting damage events in concrete using diffuse ultrasound structural health monitoring during strong environmental variations. Struct. Health Monit. 2017, 17, 410–419. [Google Scholar] [CrossRef] [Green Version]
- Xue, Q.; Larose, E.; Moreau, L.; Thery, R.; Abraham, O.; Henault, J.M. Ultrasonic monitoring of stress and cracks of the 1/3 scale mock-up of nuclear reactor concrete containment structure. arXiv 2021, arXiv:2104.01342. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 38.2 | 2.8 | 28,800 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grabke, S.; Clauß, F.; Bletzinger, K.-U.; Ahrens, M.A.; Mark, P.; Wüchner, R. Damage Detection at a Reinforced Concrete Specimen with Coda Wave Interferometry. Materials 2021, 14, 5013. https://doi.org/10.3390/ma14175013
Grabke S, Clauß F, Bletzinger K-U, Ahrens MA, Mark P, Wüchner R. Damage Detection at a Reinforced Concrete Specimen with Coda Wave Interferometry. Materials. 2021; 14(17):5013. https://doi.org/10.3390/ma14175013
Chicago/Turabian StyleGrabke, Stefan, Felix Clauß, Kai-Uwe Bletzinger, Mark Alexander Ahrens, Peter Mark, and Roland Wüchner. 2021. "Damage Detection at a Reinforced Concrete Specimen with Coda Wave Interferometry" Materials 14, no. 17: 5013. https://doi.org/10.3390/ma14175013
APA StyleGrabke, S., Clauß, F., Bletzinger, K.-U., Ahrens, M. A., Mark, P., & Wüchner, R. (2021). Damage Detection at a Reinforced Concrete Specimen with Coda Wave Interferometry. Materials, 14(17), 5013. https://doi.org/10.3390/ma14175013