
Sensitivity of Ultrasonic Coda Wave Interferometry to Material Damage—Observations from a Virtual Concrete Lab

 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
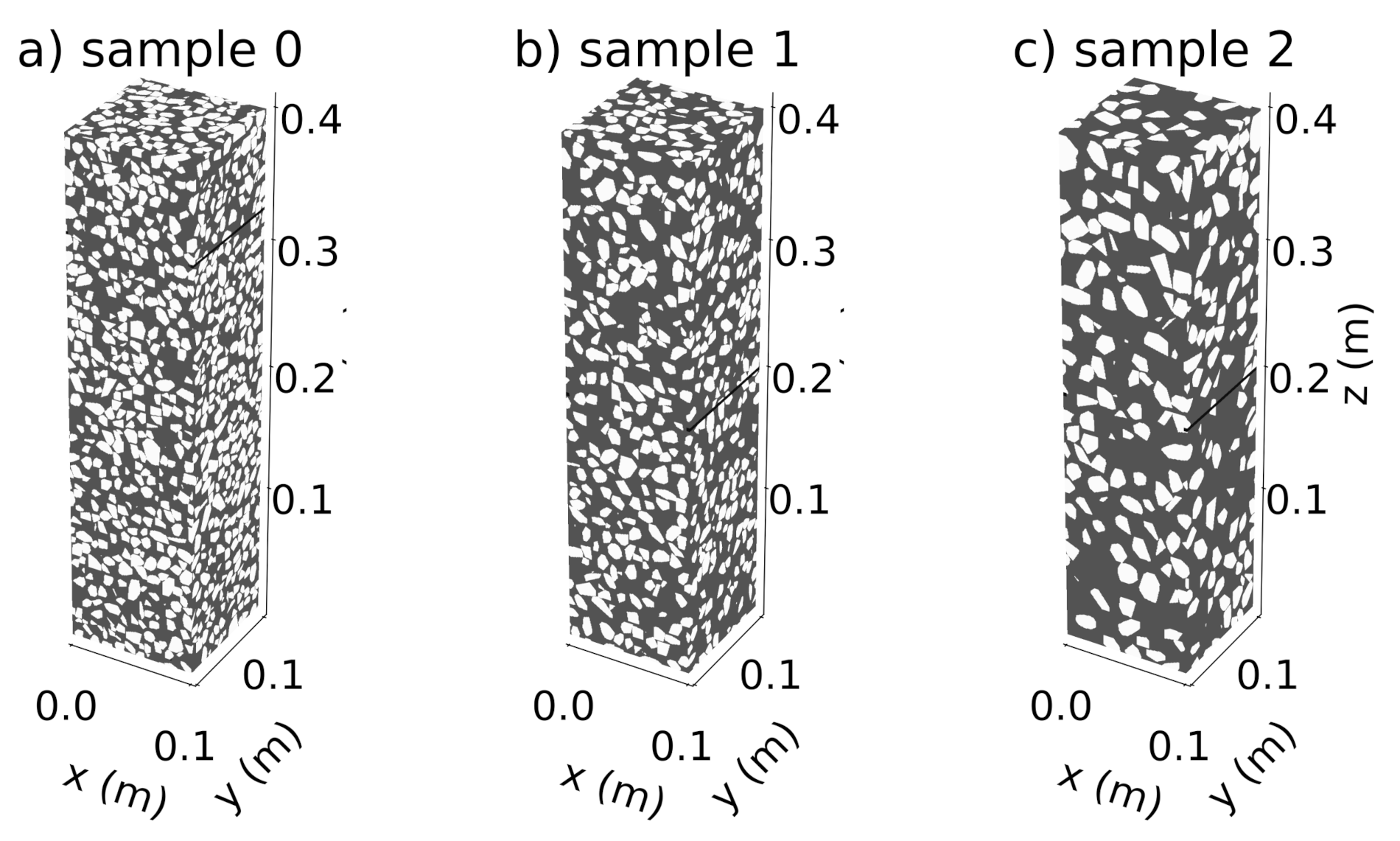
2.1. Generation of Realistic Numerical Concrete Models
2.1.1. Generation of Synthetic Aggregates
2.1.2. Assembly Algorithm
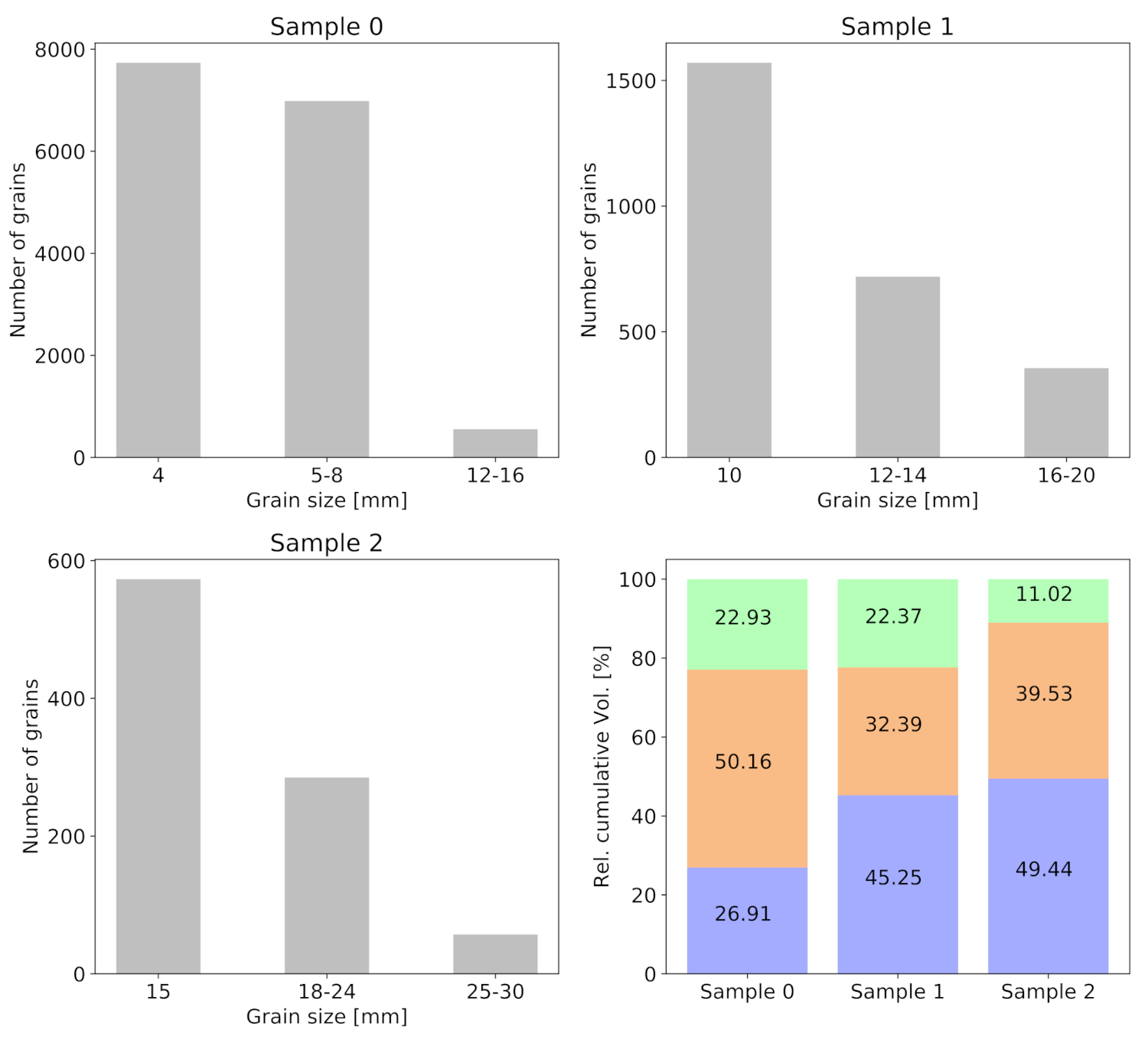
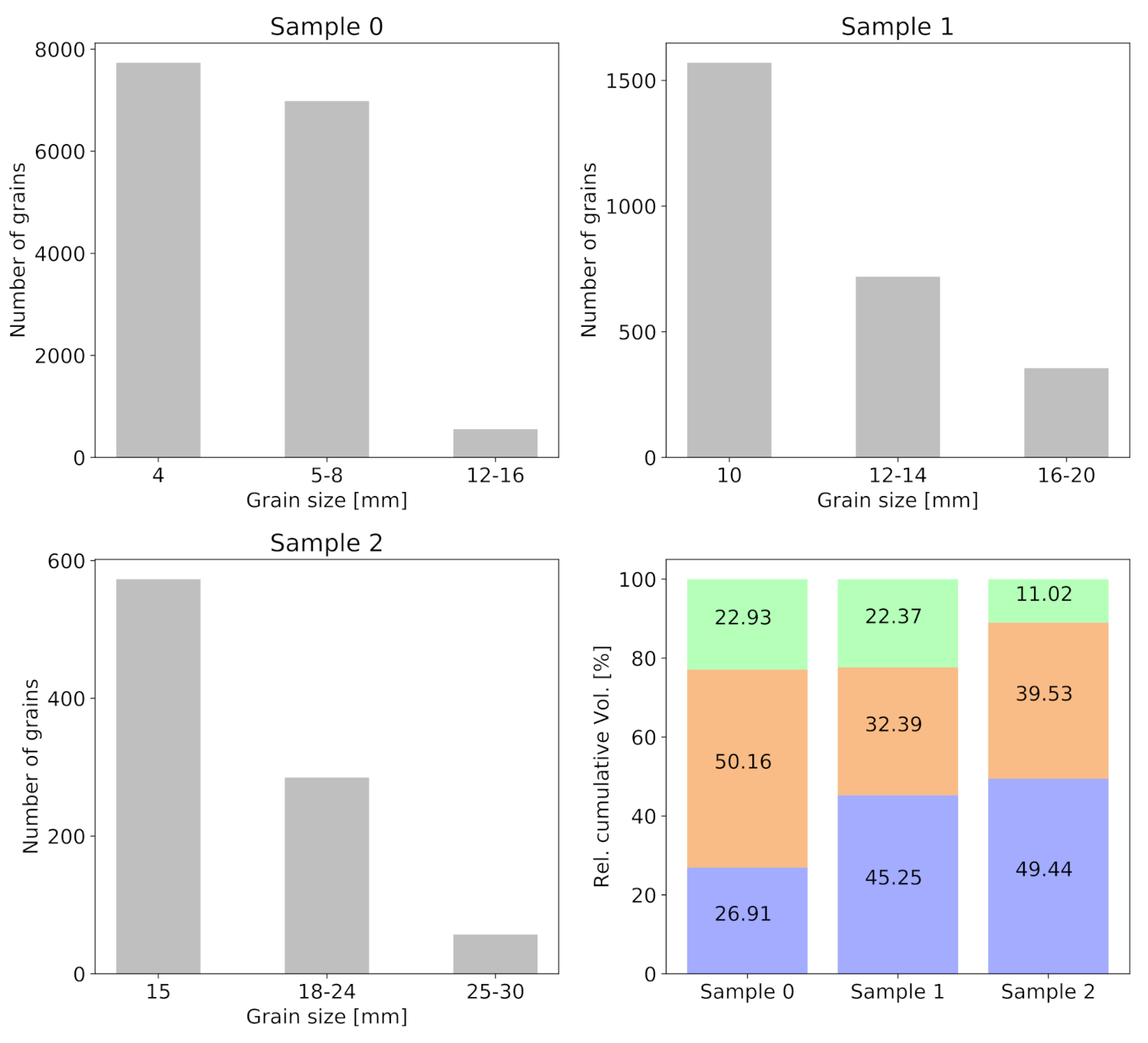
2.1.3. Variation of Models
2.2. Numerical Modeling of Damage in Concrete Subjected to Uniaxial Tension
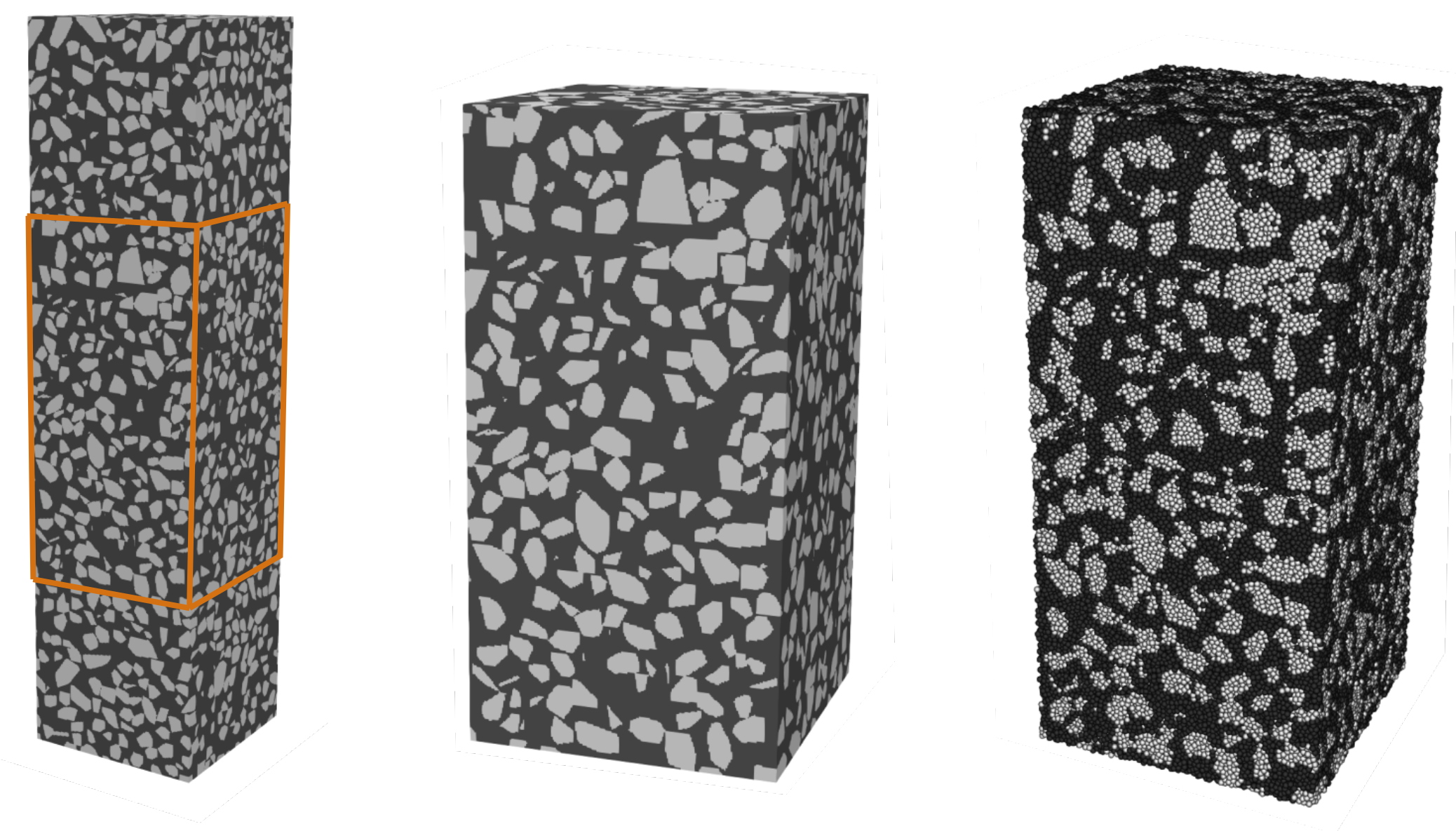
2.3. Preparation of Three-Dimensional Mesostructure Models for Ultrasonic Wave Propagation Simulations
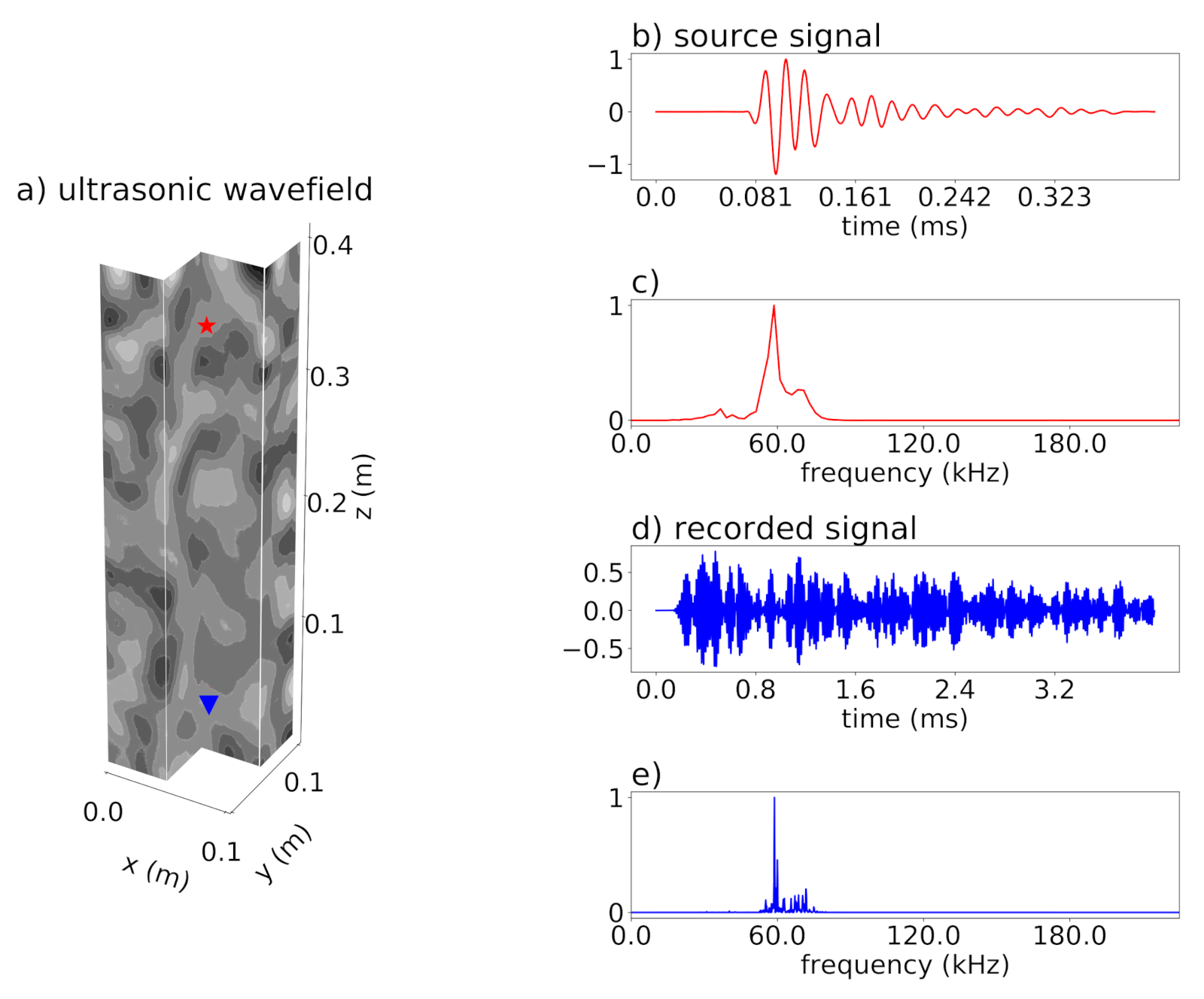
2.4. Simulation of Ultrasonic Waves in a Three-Dimensional Elastic Medium
2.5. Coda Wave Interferometry (CWI)
3. Results
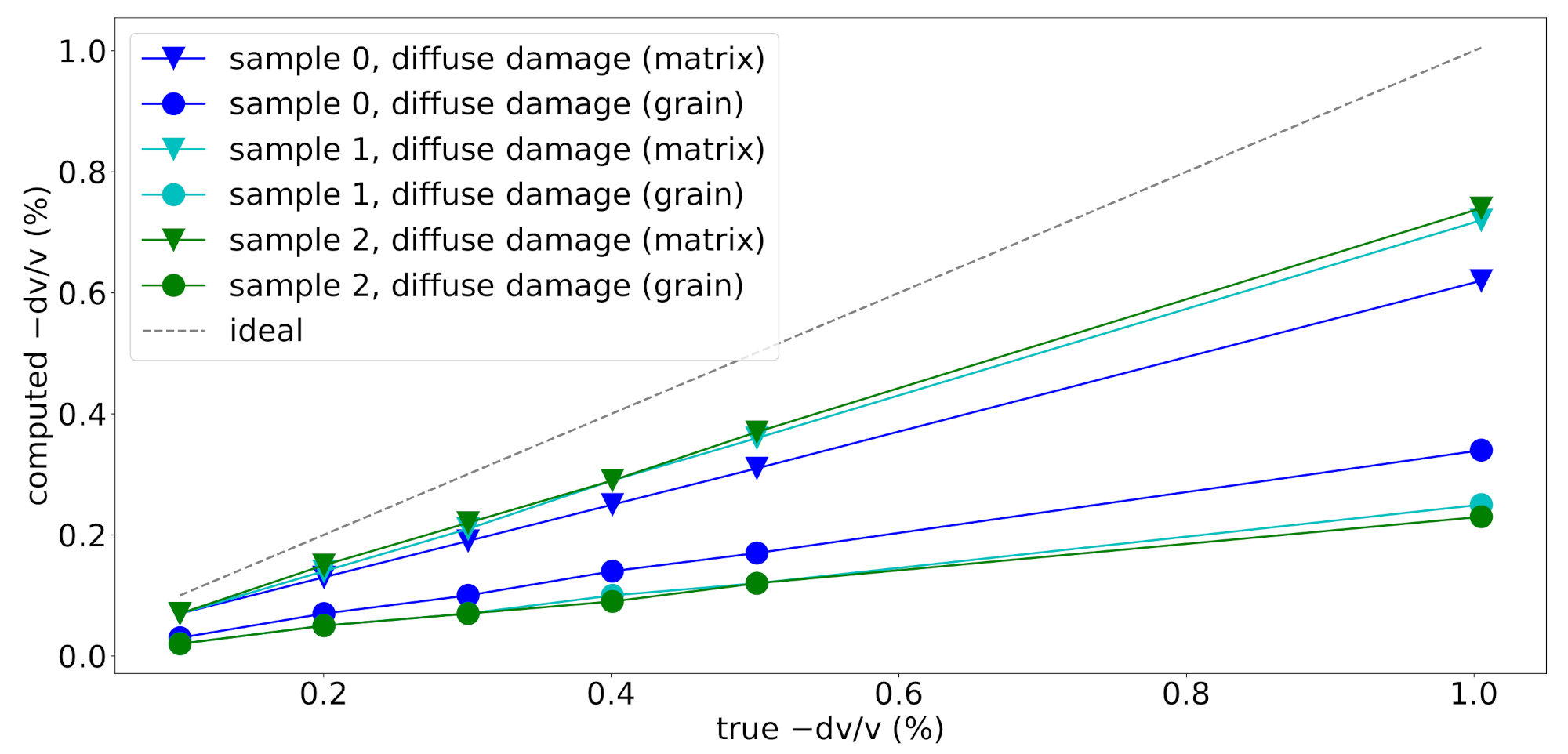
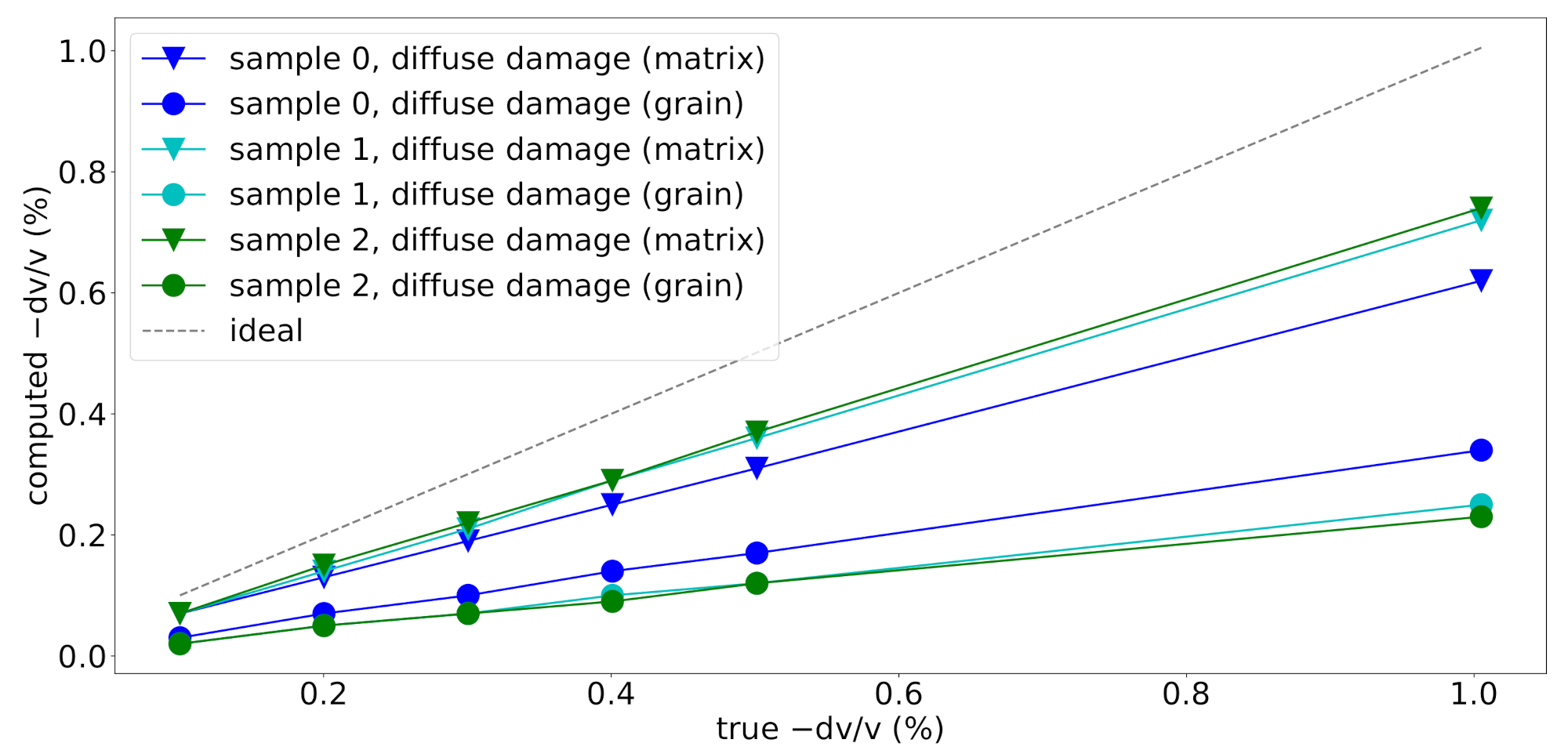
3.1. Diffuse Damage—Global Velocity Reductions
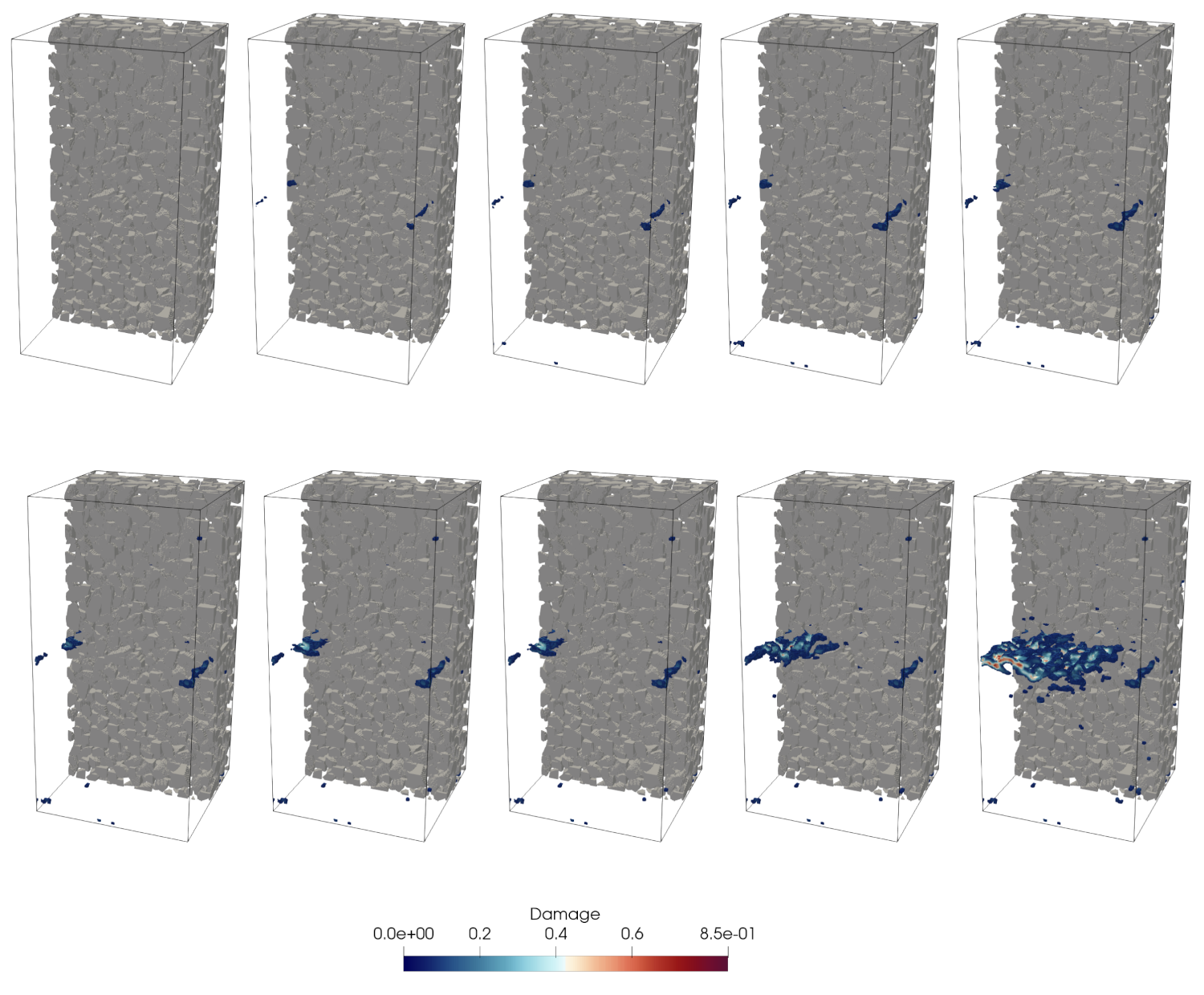
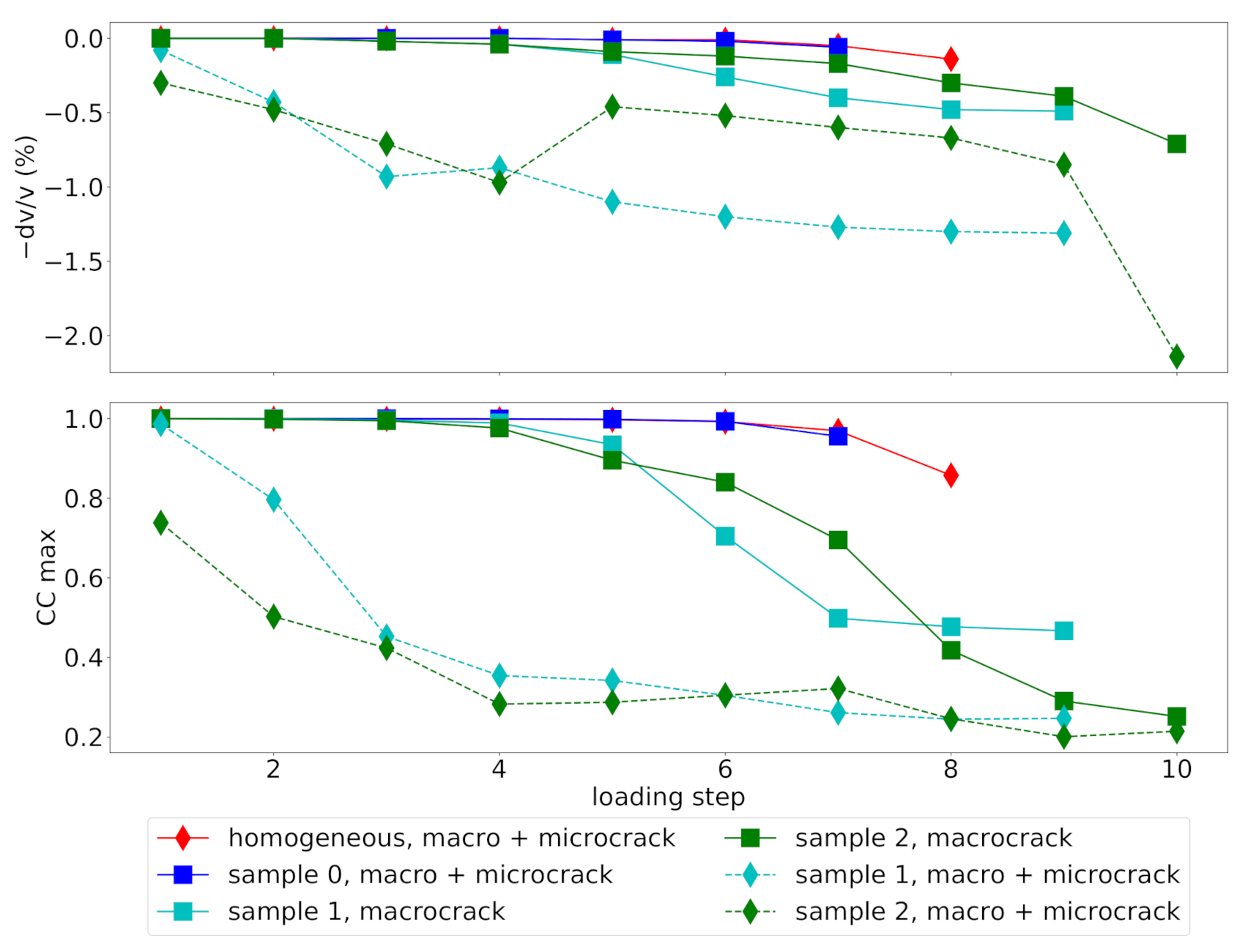
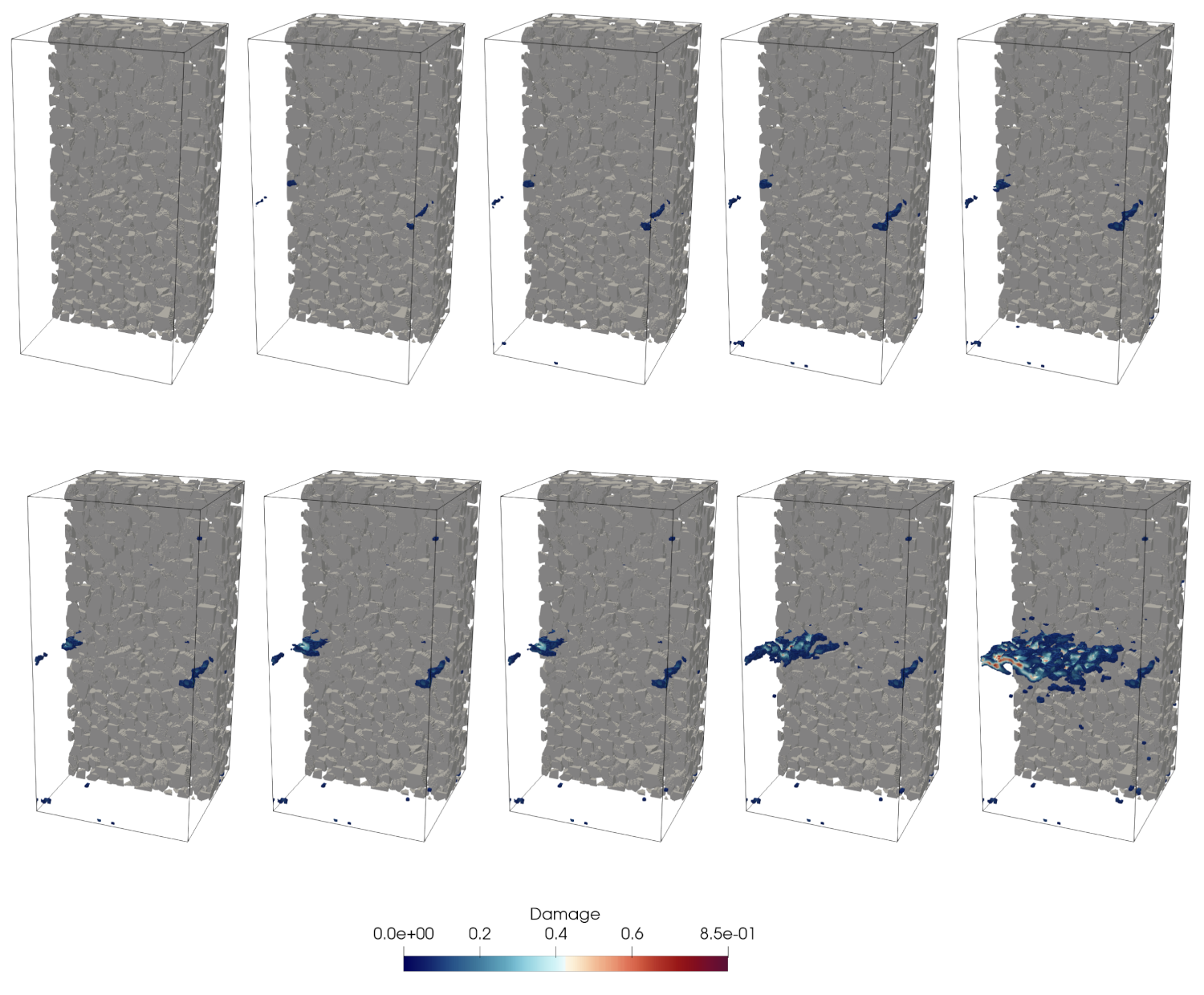
3.2. Localized Damage—Uniaxial Tension Experiments
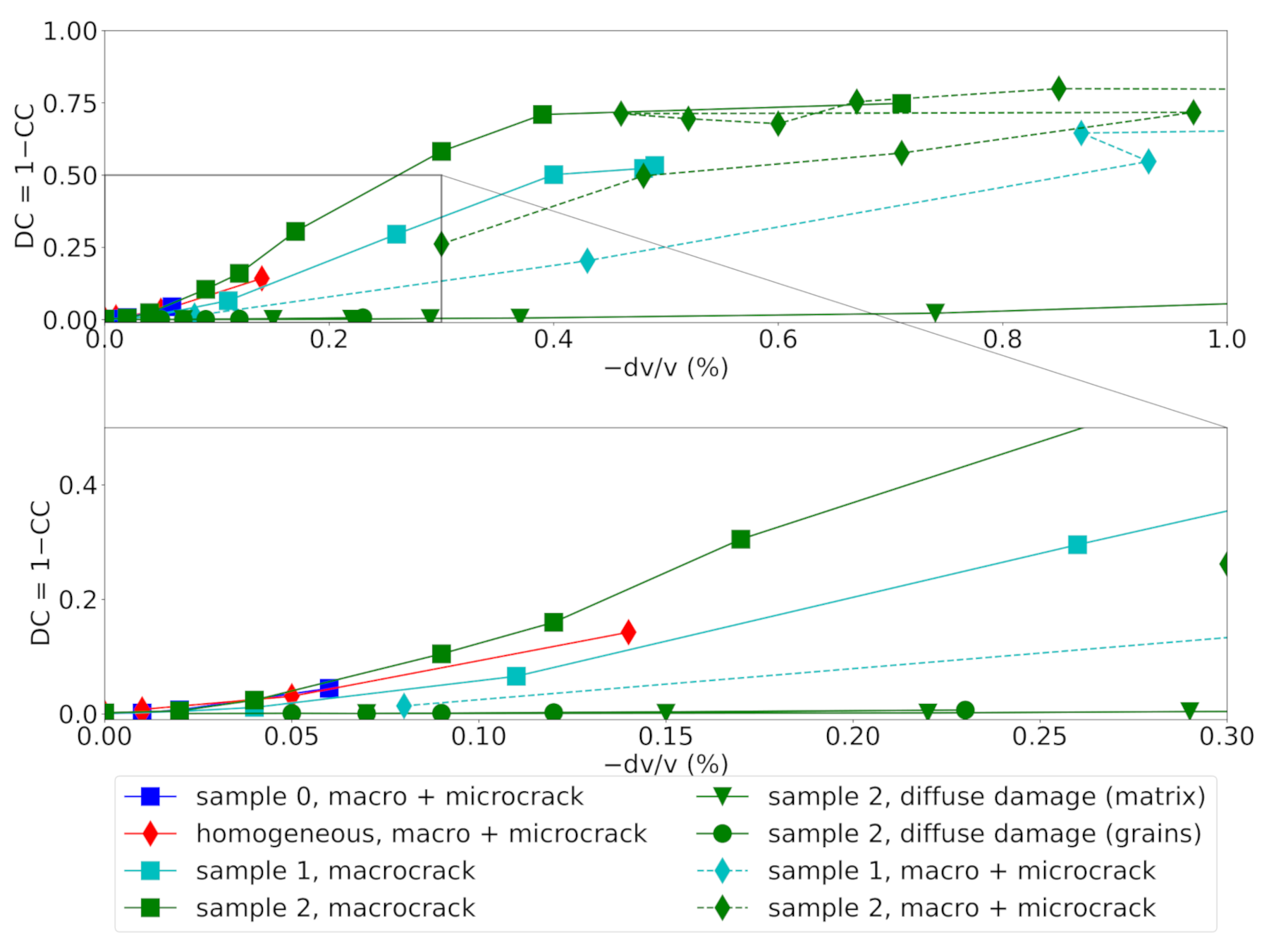
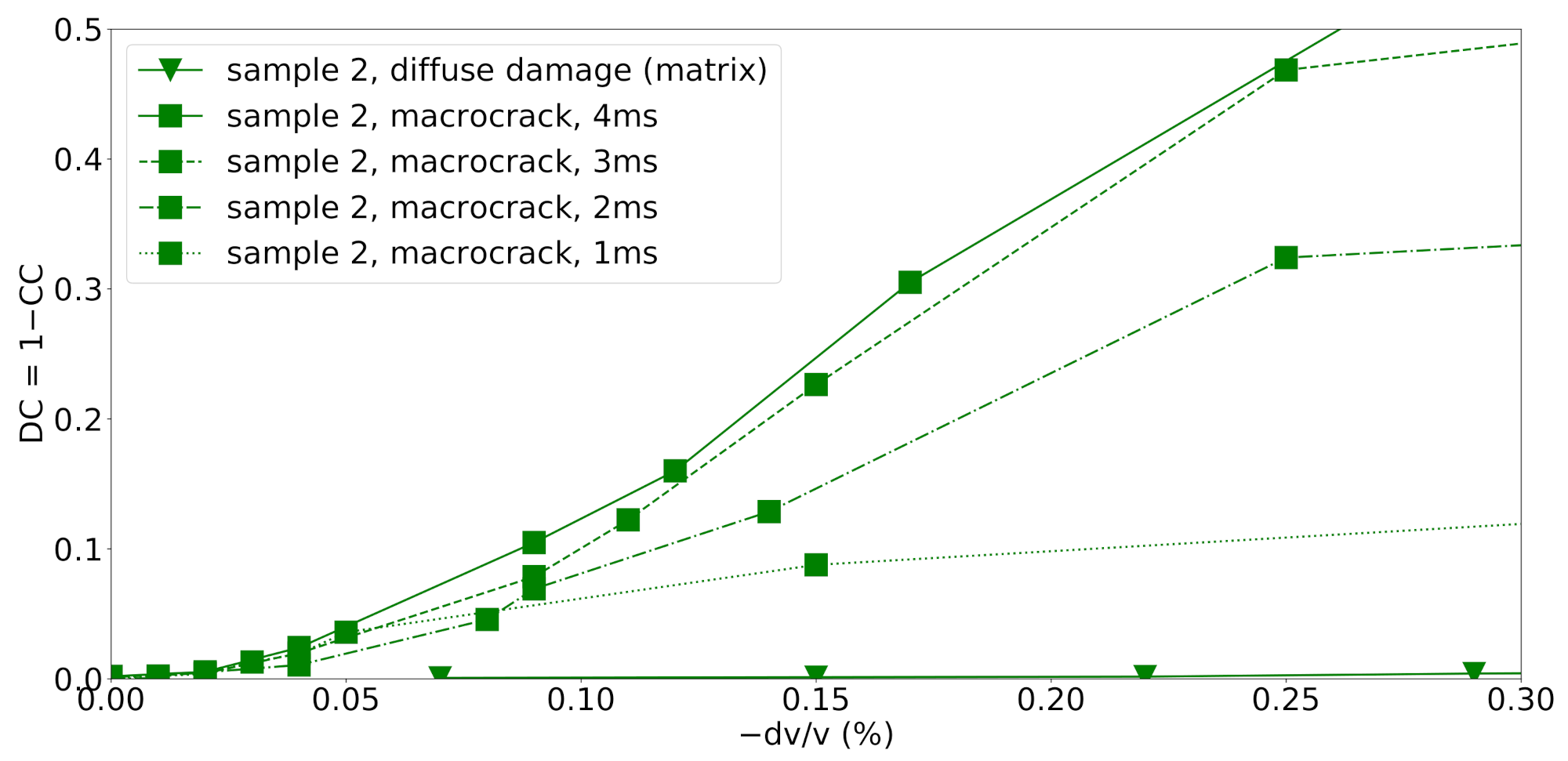
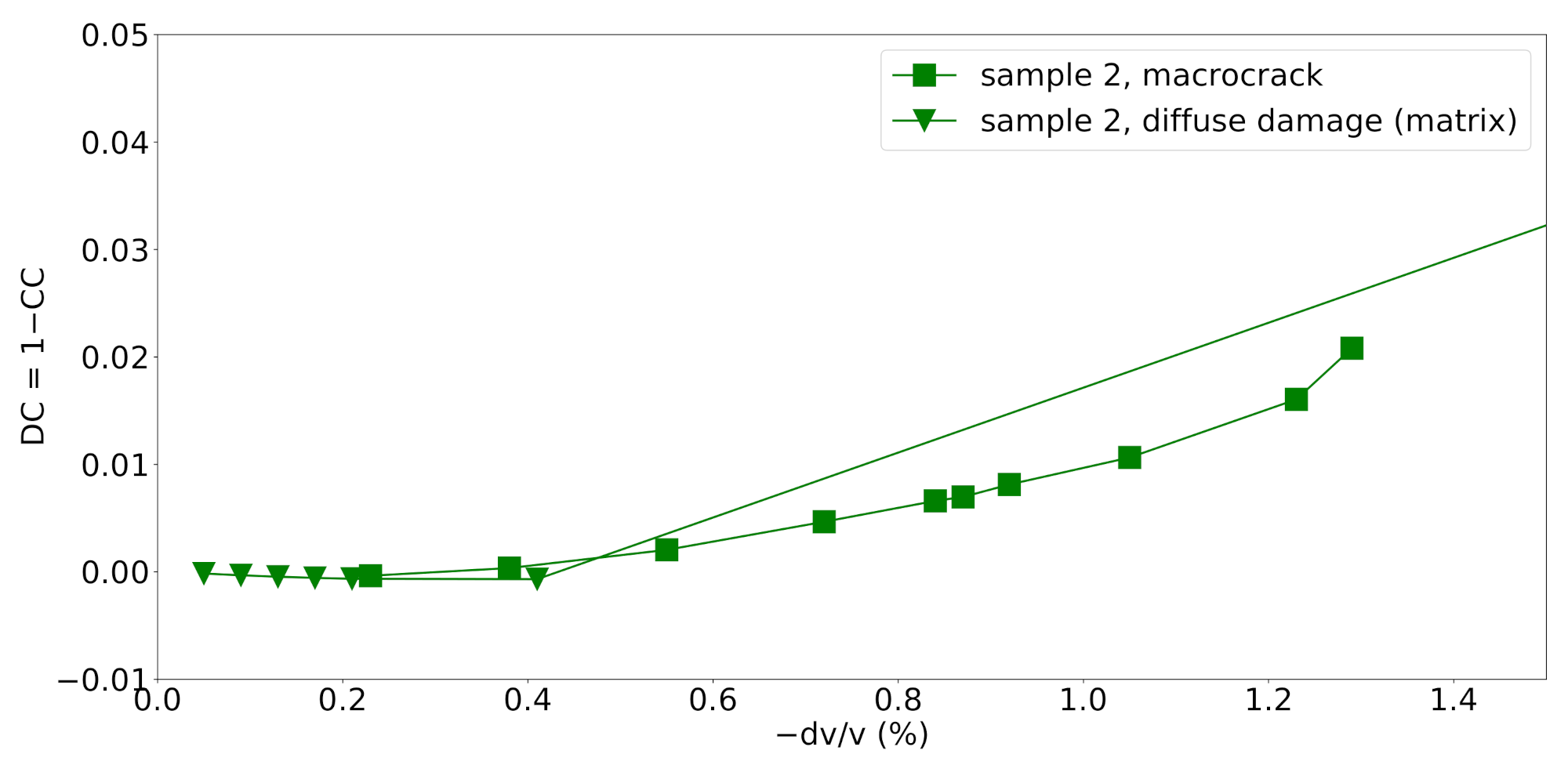
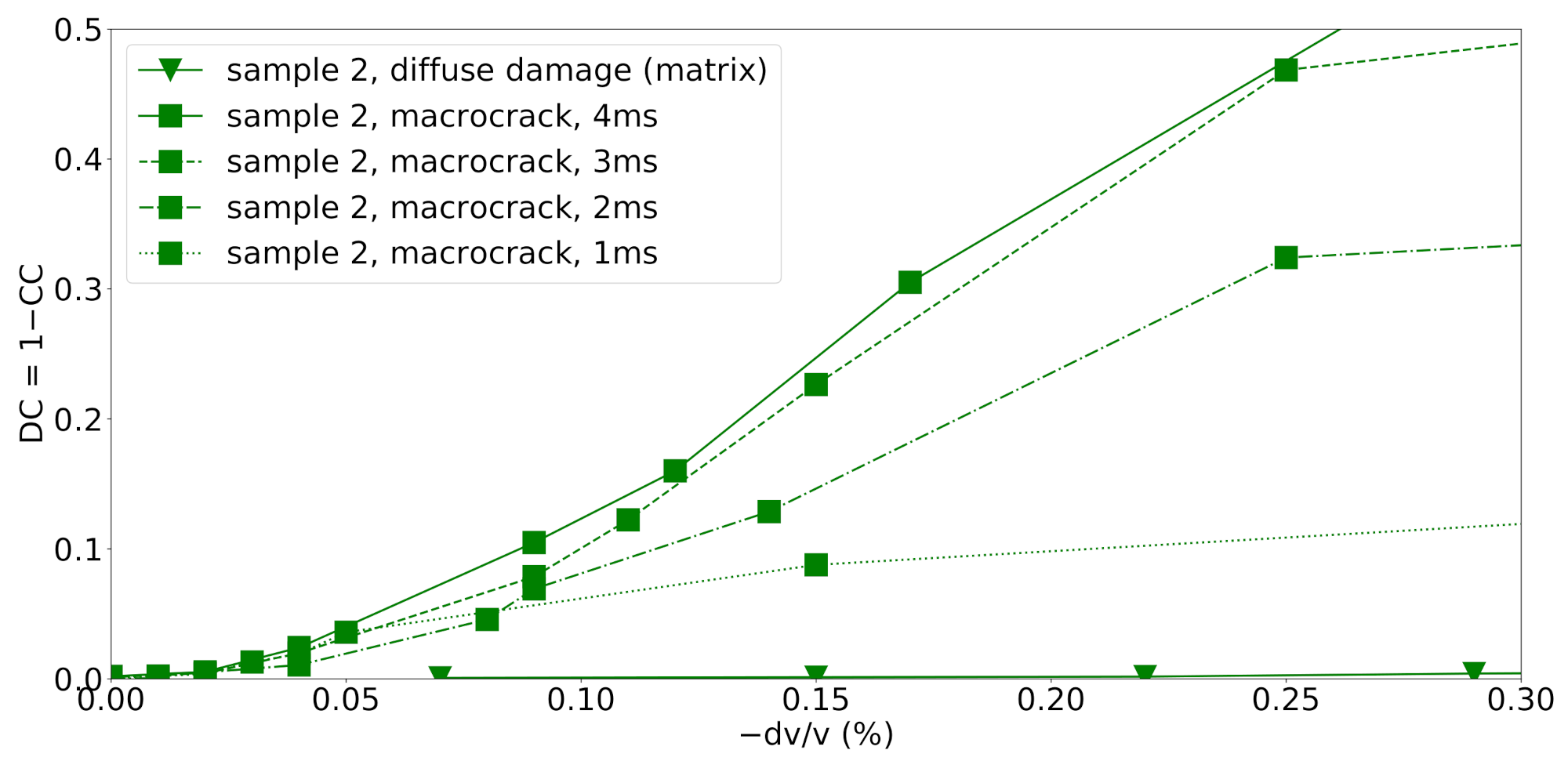
3.3. Diffuse vs. Localized Damage
4. Discussion: Implications for Large-Scale Structural Monitoring
4.1. Numerical Concrete Models
4.2. Influence of Recording Length
4.3. Influence of Boundary Conditions
5. Conclusions
- The feasibility of CWI to detect small-scale velocity changes very early has been demonstrated.
- The decorrelation of wave forms indicates the spatial extent of the damage, enabling the detection of distributed microcracking in early stages of the loading, while a constant diffuse damage shows almost no change in the decorrelation coefficient.
- On the specimen level it was possible to differentiate between diffuse and localized damage using CWI.
- Comparing reflective and absorbing boundary conditions revealed with absorbing boundary conditions, it was no longer easily possible to distinguish localized and diffuse damage as the lack of reflections from the boundaries significantly reduces illumination of the damage.
- Applications of CWI on larger scale specimen should prioritize long recording lengths to monitor and discriminate multi-scale damages.
- The use of multiple optimally placed transducers seems to be crucial for structural health monitoring of infrastructures.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Planès, T.; Larose, E. A review of ultrasonic Coda Wave Interferometry in concrete. Cem. Concr. Res. 2013, 53, 248–255. [Google Scholar] [CrossRef]
- Niederleithinger, E.; Wang, X.; Herbrand, M.; Müller, M. Processing ultrasonic data by coda wave interferometry to monitor load tests of concrete beams. Sensors 2018, 18, 1971. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lillamand, I.; Chaix, J.F.; Ploix, M.A.; Garnier, V. Acoustoelastic effect in concrete material under uni-axial compressive loading. NDT E Int. 2010, 43, 655–660. [Google Scholar] [CrossRef]
- Ould Naffa, S.; Goueygou, M.; Piwakowski, B.; Buyle-Bodin, F. Detection of chemical damage in concrete using ultrasound. Ultrasonics 2002, 40, 247–251. [Google Scholar] [CrossRef]
- Zhang, Y.; Abraham, O.; Grondin, F.; Loukili, A.; Tournat, V.; Duff, A.L.; Lascoup, B.; Durand, O. Study of stress-induced velocity variation in concrete under direct tensile force and monitoring of the damage level by using thermally-compensated Coda Wave Interferometry. Ultrasonics 2012, 52, 1038–1045. [Google Scholar] [CrossRef] [Green Version]
- Sens-Schönfelder, C.; Wegler, U. Passive image interferemetry and seasonal variations of seismic velocities at Merapi Volcano, Indonesia. Geophys. Res. Lett. 2006, 33, 1–5. [Google Scholar] [CrossRef]
- Hadziioannou, C.; Larose, E.; Coutant, O.; Roux, P.; Campillo, M. Stability of monitoring weak changes in multiply scattering media with ambient noise correlation: Laboratory experiments. J. Acoust. Soc. Am. 2009. [Google Scholar] [CrossRef] [Green Version]
- Stähler, S.C.; Sens-Schönfelder, C.; Niederleithinger, E. Monitoring stress changes in a concrete bridge with coda wave interferometry. J. Acoust. Soc. Am. 2011, 129, 1945–1952. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Planès, T.; Larose, E.; Obermann, A.; Rospars, C.; Moreau, G. Diffuse ultrasound monitoring of stress and damage development on a 15-ton concrete beam. J. Acoust. Soc. Am. 2016, 139, 1691–1701. [Google Scholar] [CrossRef] [Green Version]
- Niederleithinger, E.; Sens-Schönfelder, C.; Grothe, S.; Wiggenhauser, H. Coda wave interferometry used to localize compressional load effects in a concrete specimen. In Proceedings of the 7th European Workshop on Structural Health Monitoring, EWSHM 2014—2nd European Conference of the Prognostics and Health Management (PHM) Society, Nantes, France, 8–11 July 2014; pp. 1427–1433. [Google Scholar]
- Xie, F.; Larose, E.; Moreau, L.; Zhang, Y.; Planes, T. Characterizing extended changes in multiple scattering media using coda wave decorrelation: Numerical simulations. Waves Random Complex Media 2018, 28, 1–14. [Google Scholar] [CrossRef]
- Concrete Mesostructure Generation Using Python. Available online: https://pycmg.readthedocs.io/en/latest/ (accessed on 15 July 2021).
- Cundall, P.; Strack, A. A discrete numerical model for granular assemblies. Geotechnique 1979, 29, 47–65. [Google Scholar] [CrossRef]
- Saenger, E.H.; Gold, N.; Shapiro, S.A. Modeling the propagation of elastic waves using a modified finite-difference grid. Wave Motion 2000, 31, 77–92. [Google Scholar] [CrossRef]
- Zhang, Y.; Abraham, O.; Tournat, V.; Le Duff, A.; Lascoup, B.; Loukili, A.; Grondin, F.; Durand, O. Validation of a thermal bias control technique for Coda Wave Interferometry (CWI). Ultrasonics 2013, 53, 658–664. [Google Scholar] [CrossRef] [Green Version]
- Van Mier, J.G. Fracture Processes of Concrete; CRC Press: Boca Raton, FL, USA, 1996; Volume 12. [Google Scholar]
- Holla, V.; Vu, G.; Timothy, J.J.; Diewald, F.; Gehlen, C.; Meschke, G. Computational Generation of Virtual Concrete Mesostructures. Materials 2021, 14, 3782. [Google Scholar] [CrossRef]
- Šmilauer, V. Cohesive Particle Model Using Discrete Element Method on the Yade Platform. Ph.D. Thesis, Czech Technical University, Prague, Czech Republic, 2010. [Google Scholar]
- Vu, G.; Iskhakov, T.; Timothy, J.J.; Schulte-Schrepping, C.; Breitenbücher, R.; Meschke, G. Cementitious Composites with High Compaction Potential: Modeling and Calibration. Materials 2020, 13, 4989. [Google Scholar] [CrossRef]
- Akita, H.; Koide, H.; Tomon, M.; Sohn, D. A practical method for uniaxial tension test of concrete. Mater. Struct. 2003, 36, 365–371. [Google Scholar] [CrossRef]
- Nitka, M.; Tejchman, J. J. Modelling of concrete behaviour in uniaxial compression and tension with DEM. Granul. Matter 2015, 17, 145–164. [Google Scholar] [CrossRef]
- WooDEM Documentation. 2016. Available online: https://woodem.org (accessed on 15 July 2021).
- Karl Kocur, G.; Saenger, E.H.; Vogel, T. Elastic wave propagation in a segmented X-ray computed tomography model of a concrete specimen. Constr. Build. Mater. 2010, 24, 2393–2400. [Google Scholar] [CrossRef]
- Kocur, G.K.; Saenger, E.H.; Grosse, C.U.; Vogel, T. Time reverse modeling of acoustic emissions in a reinforced concrete beam. Ultrasonics 2016, 65, 96–104. [Google Scholar] [CrossRef]
- Meister, R.; Robertson, E.C.; Werke, R.W.; Raspet, R. Elastic moduli of rock glasses under pressure to 8 kilobars and geophysical implications. J. Geophys. Res. 1980, 85, 6461–6470. [Google Scholar] [CrossRef]
- Saenger, E.H.; Bohlen, T. Finite-difference modeling of viscoelastic and anisotropic wave propagation using the rotated staggered grid. Geophysics 2004, 69, 583–591. [Google Scholar] [CrossRef]
- Niederleithinger, E.; Wolf, J.; Mielentz, F.; Wiggenhauser, H.; Pirskawetz, S. Embedded ultrasonic transducers for active and passive concrete monitoring. Sensors 2015, 15, 9756–9772. [Google Scholar] [CrossRef] [Green Version]
- Fröjd, P.; Ulriksen, P. Frequency selection for coda wave interferometry in concrete structures. Ultrasonics 2017, 80, 1–8. [Google Scholar] [CrossRef]
- Fontoura Barroso, D.; Epple, N.; Niederleithinger, E. A Portable Low-Cost Ultrasound Measurement Device for Concrete Monitoring. Inventions 2021, 6, 36. [Google Scholar] [CrossRef]
- Bassil, A.; Wang, X.; Chapeleau, X.; Niederleithinger, E.; Abraham, O.; Leduc, D. Distributed fiber optics sensing and coda wave interferometry techniques for damage monitoring in concrete structures. Sensors 2019, 19, 356. [Google Scholar] [CrossRef] [Green Version]
- Clauß, F.; Epple, N.; Ahrens, M.A.; Niederleithinger, E.; Mark, P. Comparison of experimentally determined two-dimensional strain fields and mapped ultrasonic data processed by coda wave interferometry. Sensors 2020, 20, 4023. [Google Scholar] [CrossRef]
- Saenger, E.H.; Finger, C.; Karimpouli, S.; Tahmasebi, P. Single-Station Coda Wave Interferometry: A Feasibility Study Using Machine Learning. Materials 2021, 14, 3451. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Grains | Volume Fraction (%) | |||
|---|---|---|---|---|
| Sample 0 | 15271 | 40.08% | 4 | 16 |
| Sample 1 | 2713 | 31.41% | 10 | 20 |
| Sample 2 | 915 | 31.11% | 15 | 30 |
| Elastic parameters | Mortar | Aggregate | ||
|---|---|---|---|---|
| normal modulus | 8 | 16 | GPa | |
| tangential modulus | 1 | 2 | GPa | |
| Damage law in tension | ||||
| limit elastic strain | ||||
| relative ductility | 5, 50 | 5, 50 | ||
| Elasto-plasticity in shear | ||||
| initial cohesion | 1 | 2 | MPa | |
| frictional angle | 0.57 | 0.57 | ||
| Tensile Strength (MPa) | Elastic Modulus (GPa) | Strain to Peak Load (10-6) | |
|---|---|---|---|
| Sample 0 | 1.51 | 17.89 | 82 |
| Sample 1 | 2.24 | 16.59 | 157 |
| Sample 2 | 1.91 | 16.63 | 144 |
| (m/s) | (m/s) | () | K (GPa) | (GPa) | |
|---|---|---|---|---|---|
| matrix | 3950 | 2250 | 2050 | 18.147625 | 10.378125 |
| grains | 6230 | 3330 | 2950 | 70.881715 | 32.712255 |
| (mm) | (mm) | (%) | (%) | |
|---|---|---|---|---|
| sample 0 | 4 | 16 | 6.1 | 24.3 |
| sample 1 | 10 | 20 | 15.2 | 30.4 |
| sample 2 | 15 | 30 | 22.8 | 45.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Finger, C.; Saydak, L.; Vu, G.; Timothy, J.J.; Meschke, G.; Saenger, E.H. Sensitivity of Ultrasonic Coda Wave Interferometry to Material Damage—Observations from a Virtual Concrete Lab. Materials 2021, 14, 4033. https://doi.org/10.3390/ma14144033
Finger C, Saydak L, Vu G, Timothy JJ, Meschke G, Saenger EH. Sensitivity of Ultrasonic Coda Wave Interferometry to Material Damage—Observations from a Virtual Concrete Lab. Materials. 2021; 14(14):4033. https://doi.org/10.3390/ma14144033
Chicago/Turabian StyleFinger, Claudia, Leslie Saydak, Giao Vu, Jithender J. Timothy, Günther Meschke, and Erik H. Saenger. 2021. "Sensitivity of Ultrasonic Coda Wave Interferometry to Material Damage—Observations from a Virtual Concrete Lab" Materials 14, no. 14: 4033. https://doi.org/10.3390/ma14144033
APA StyleFinger, C., Saydak, L., Vu, G., Timothy, J. J., Meschke, G., & Saenger, E. H. (2021). Sensitivity of Ultrasonic Coda Wave Interferometry to Material Damage—Observations from a Virtual Concrete Lab. Materials, 14(14), 4033. https://doi.org/10.3390/ma14144033