
Effects of Loading and Boundary Conditions on the Performance of Ultrasound Compressional Viscoelastography: A Computational Simulation Study to Guide Experimental Design



Abstract
1. Introduction
2. Materials and Methods
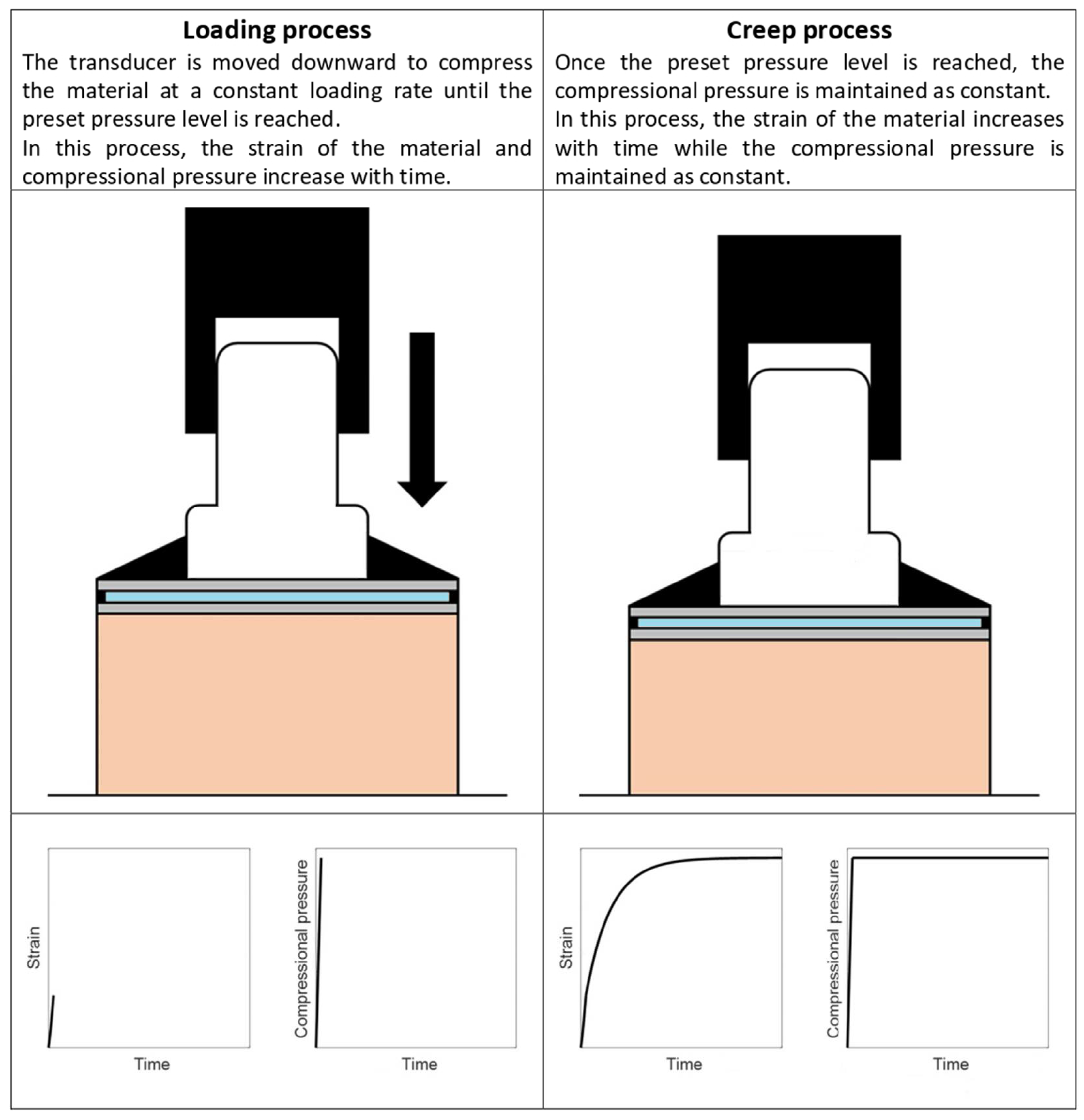
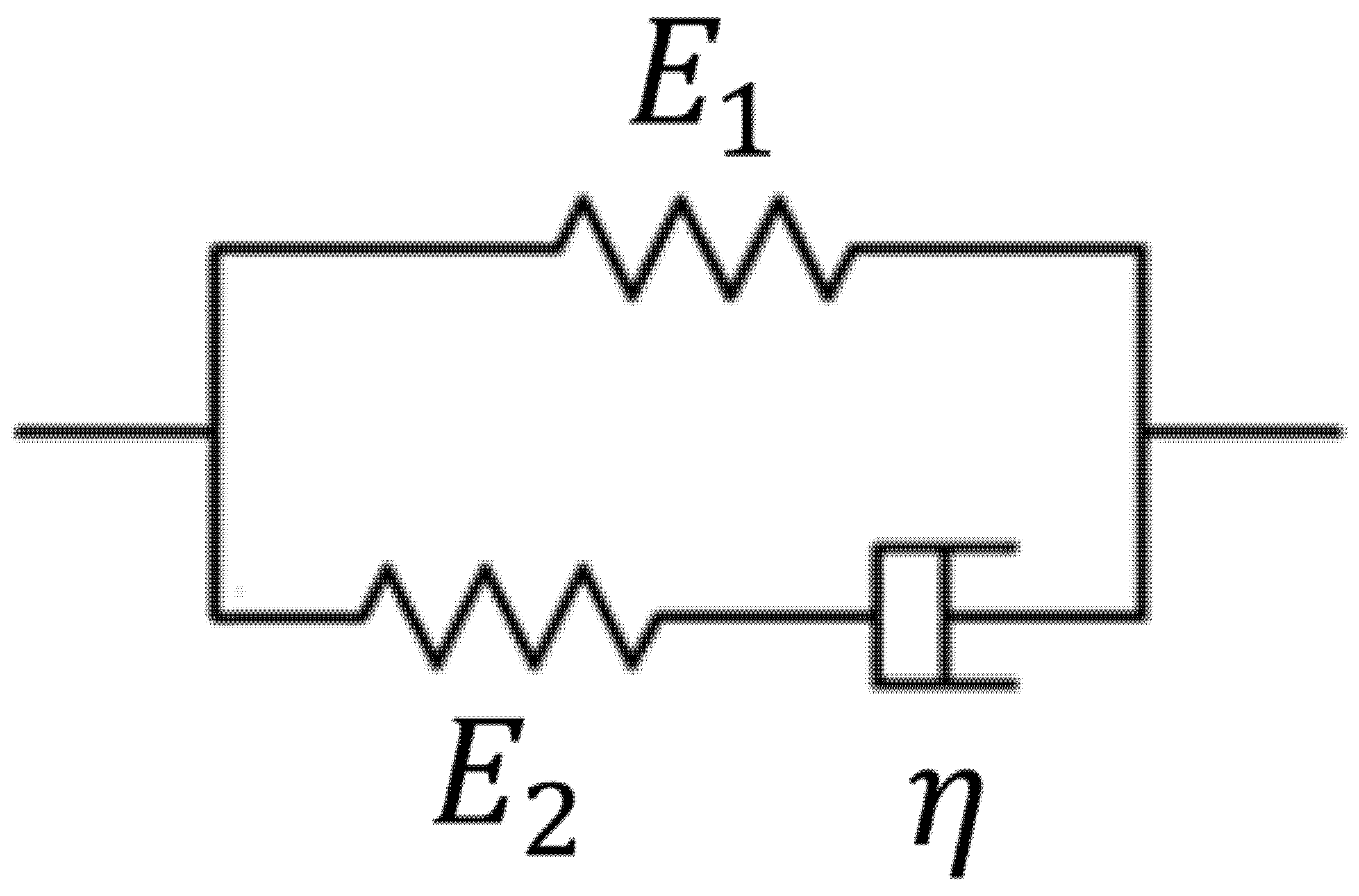
2.1. Principle of Compressional Viscoelastography




2.2. Computational Simulations and Data Analysis
- (1)
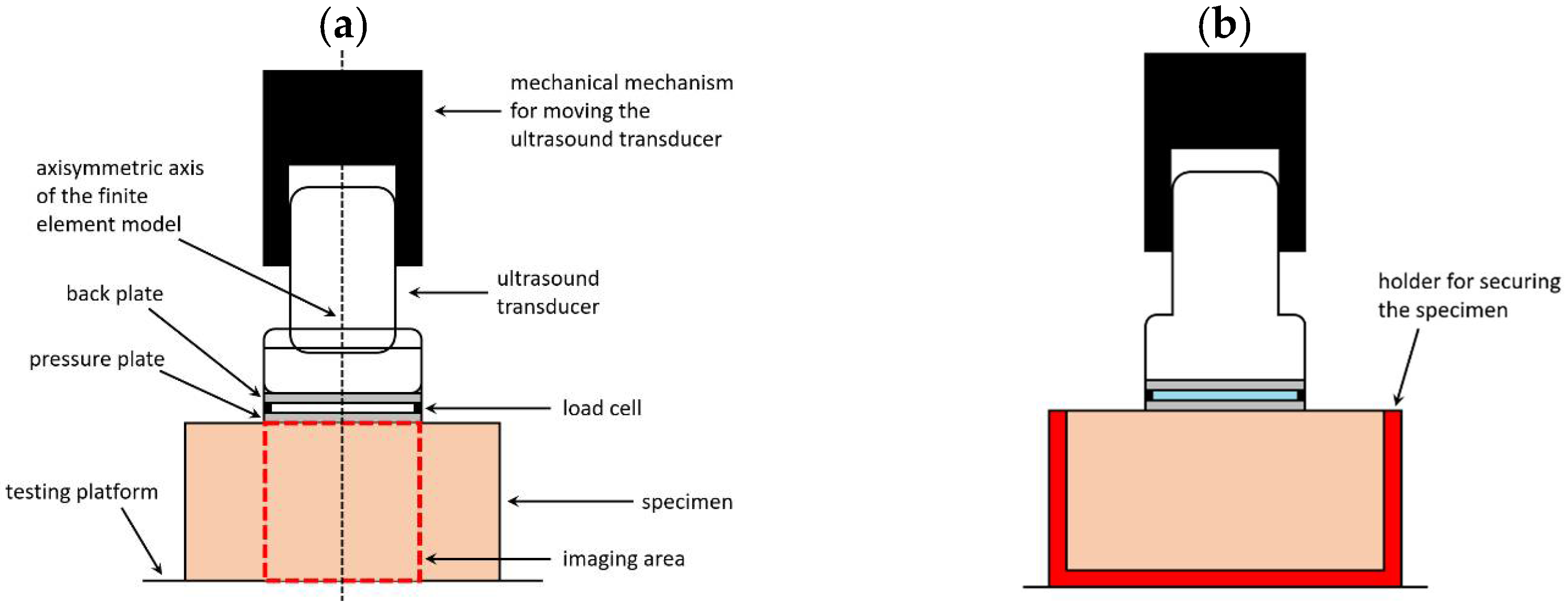
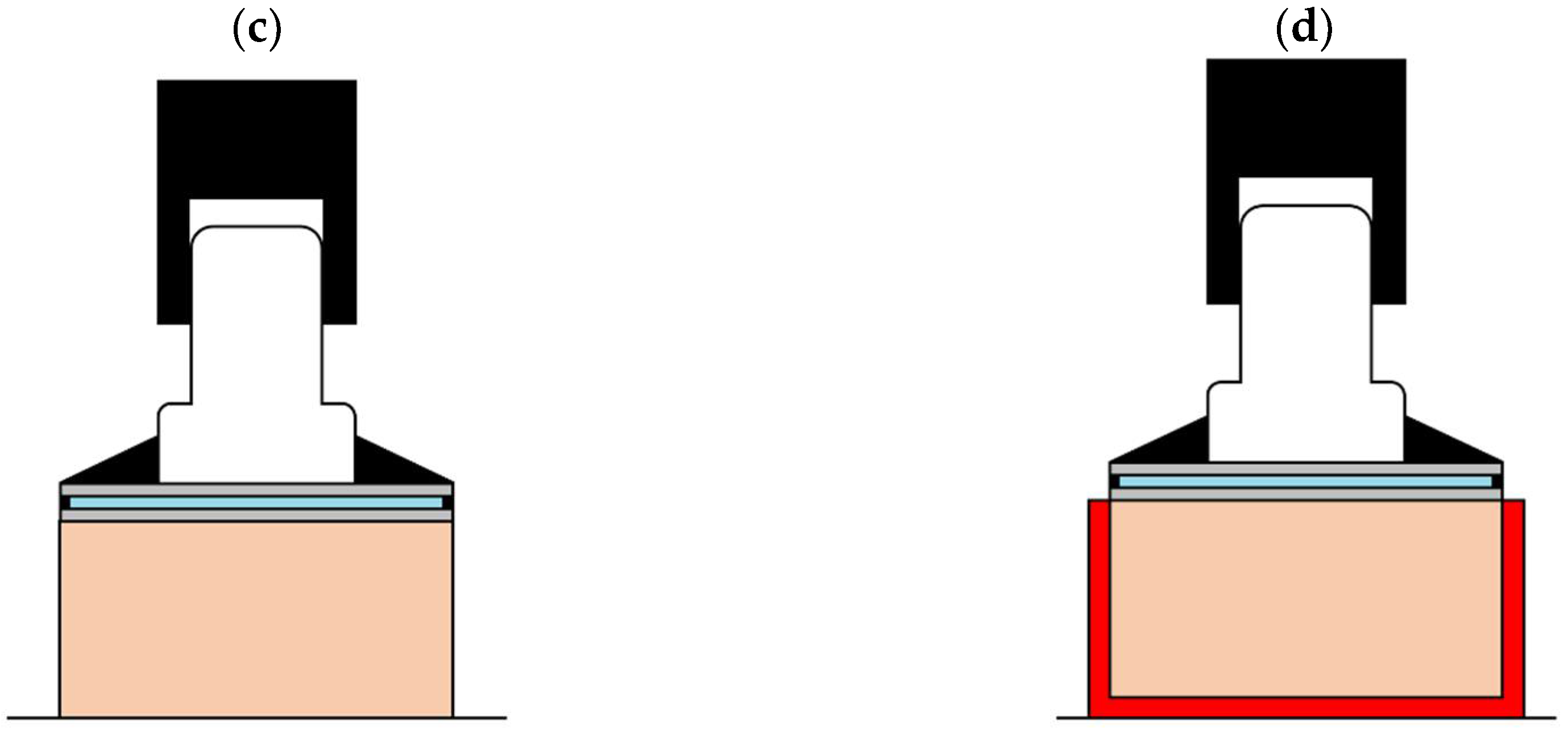
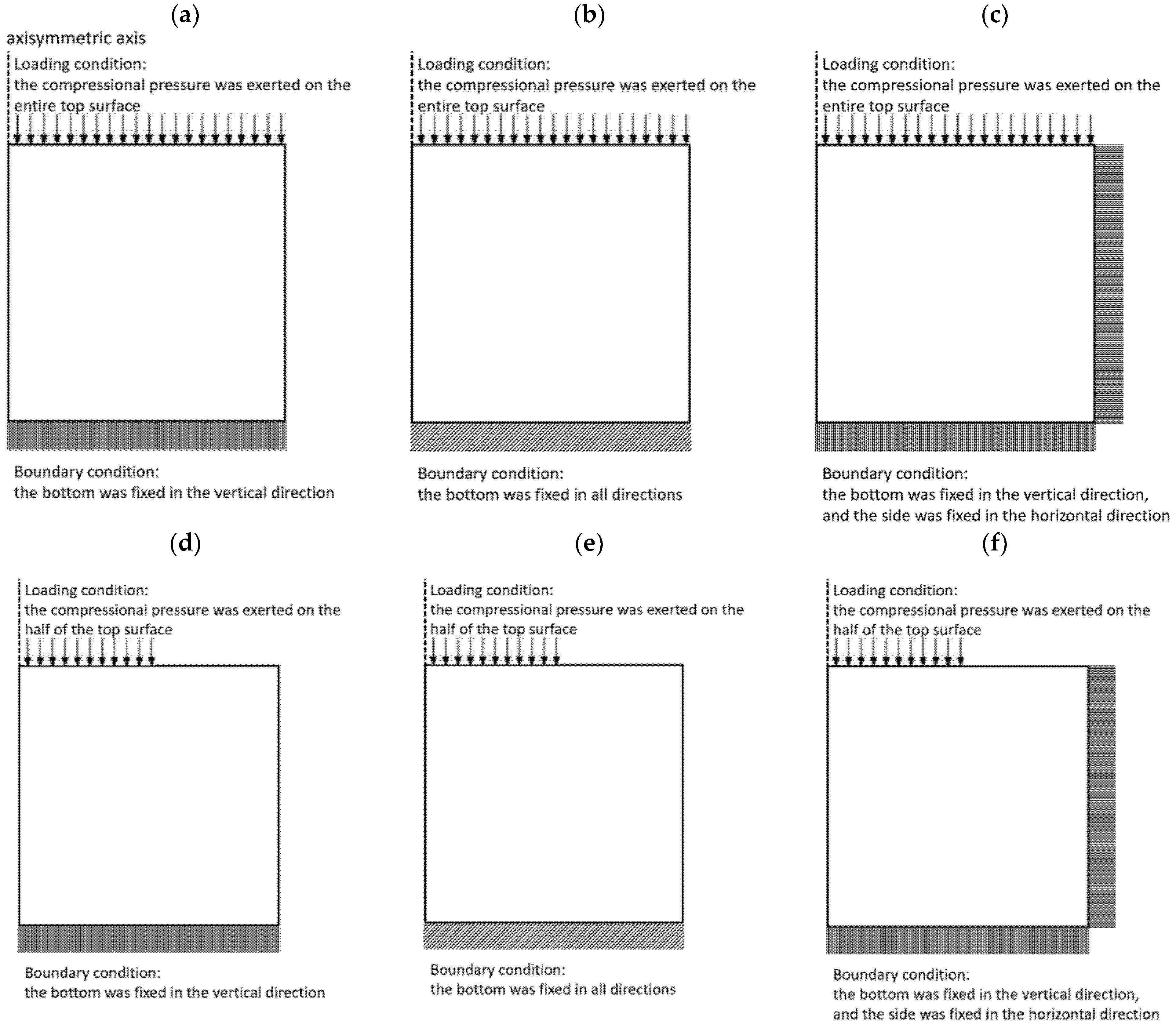
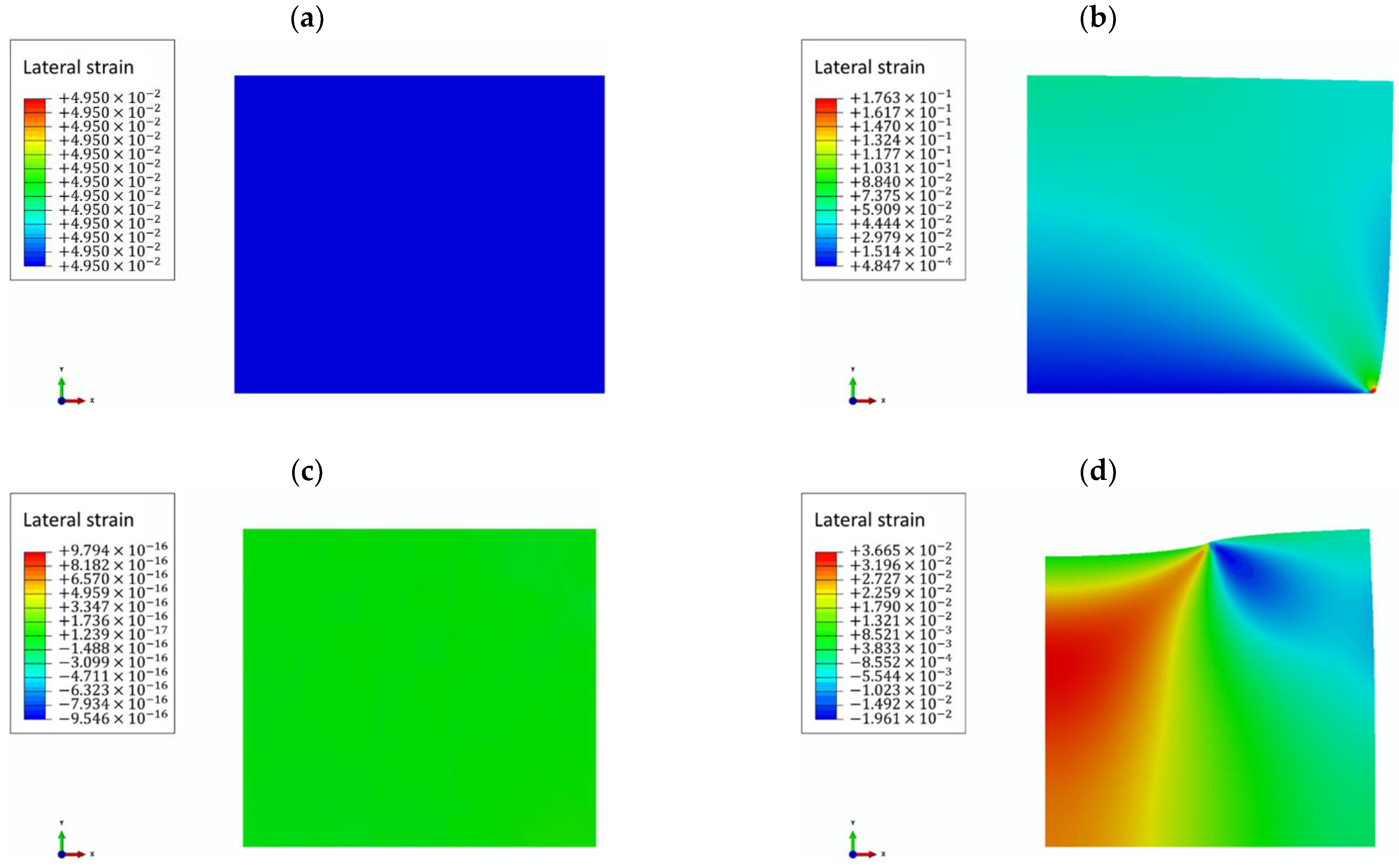
- Simulation test 1 (Figure 5a): uniform compressional pressure is exerted on the entire top surface. The bottom is fixed along the vertical direction while the side is not fixed. This condition is associated with the experimental setup in Figure 2c. Simulation test 1 is also used to investigate the validity of compressional viscoelastography. See Appendix A for the result of the validity test.
- (2)
- Simulation test 2 (Figure 5b): uniform compressional pressure is exerted on the entire top surface. The bottom is fixed along all directions while the side is not fixed.
- (3)
- (4)
- (5)
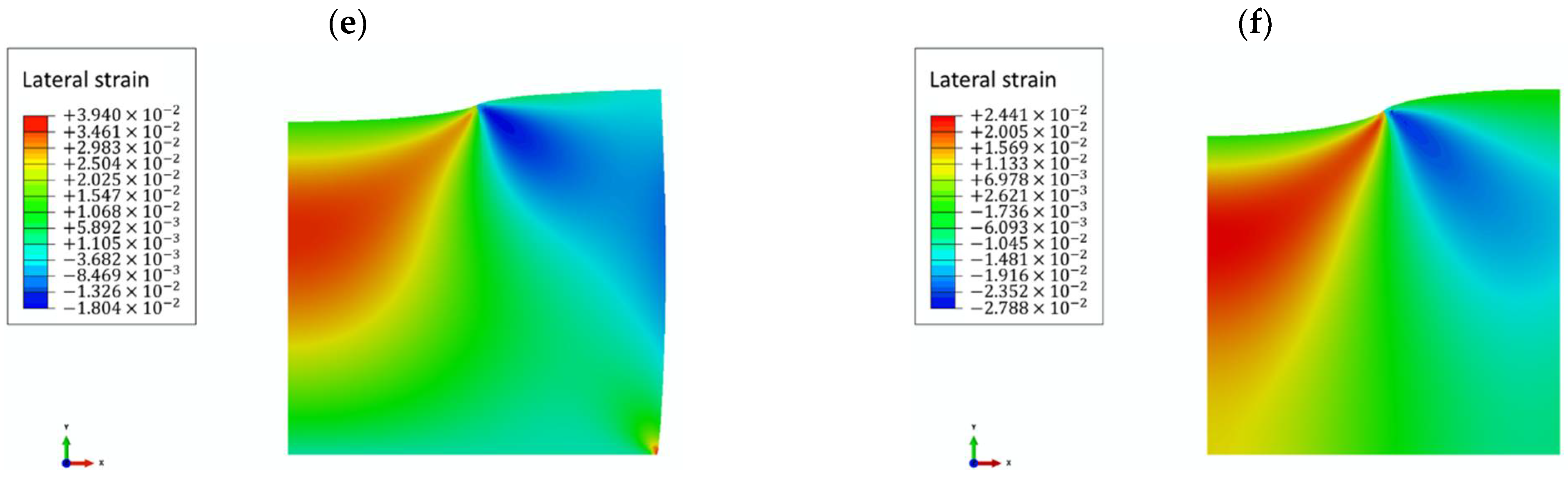
- Simulation test 5 (Figure 5e): uniform compressional pressure is exerted on half of the top surface. The bottom is fixed along all directions while the side is not fixed.
- (6)

3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Theoretical Values | Simulation Values | Error (%) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Material Number | E | E | E | ||||||
| Group 1 | |||||||||
| 1 | 10,000 | 5 | 0.8 | 10,001 | 5.067 | 0.797 | 0.01 | 1.35 | 0.34 |
| 2 | 20,000 | 5 | 0.8 | 20,003 | 5.068 | 0.797 | 0.01 | 1.37 | 0.34 |
| 3 | 30,000 | 5 | 0.8 | 30,006 | 5.069 | 0.797 | 0.02 | 1.38 | 0.34 |
| Group 2 | |||||||||
| 1 | 10,000 | 1 | 0.8 | 10,001 | 1.014 | 0.797 | 0.01 | 1.35 | 0.34 |
| 2 | 10,000 | 5 | 0.8 | 10,001 | 5.067 | 0.797 | 0.01 | 1.35 | 0.34 |
| 3 | 10,000 | 10 | 0.8 | 10,001 | 10.135 | 0.797 | 0.01 | 1.34 | 0.34 |
| Group 3 | |||||||||
| 1 | 10,000 | 5 | 0.4 | 10,000 | 5.011 | 0.399 | 0.00 | 0.23 | 0.34 |
| 2 | 10,000 | 5 | 0.6 | 10,000 | 5.025 | 0.598 | 0.00 | 0.51 | 0.34 |
| 3 | 10,000 | 5 | 0.8 | 10,001 | 5.067 | 0.797 | 0.01 | 1.35 | 0.34 |
References
- Drakonaki, E.E.; Allen, G.M.; Wilson, D.J. Ultrasound elastography for musculoskeletal applications. Br. J. Radiol. 2012, 85, 1435–1445. [Google Scholar] [CrossRef] [PubMed]
- Sigrist, R.M.; Liau, J.; El Kaffas, A.; Chammas, M.C.; Willmann, J.K. Ultrasound elastography: Review of techniques and clinical applications. Theranostics 2017, 7, 1303. [Google Scholar] [CrossRef] [PubMed]
- Zaleska-Dorobisz, A.U.; Kaczorowski, B.K.; Pawluś, B.A.; Puchalska, B.A.; Inglot, B.M. Ultrasound elastography–review of techniques and its clinical applications. Brain 2013, 6, 10–14. [Google Scholar] [CrossRef]
- Ophir, J.; Cespedes, I.; Ponnekanti, H.; Yazdi, Y.; Li, X. Elastography: A quantitative method for imaging the elasticity of biological tissues. Ultrason. Imaging 1991, 13, 111–134. [Google Scholar] [CrossRef] [PubMed]
- Cosgrove, D.; Piscaglia, F.; Bamber, J.; Bojunga, J.; Correas, J.-M.; Gilja, O.H.; Klauser, A.S.; Sporea, I.; Calliada, F.; Cantisani, V.; et al. EFSUMB Guidelines and Recommendations on the Clinical Use of Ultrasound Elastography.Part 2: Clinical Applications. Ultraschall Med. 2013, 34, 238–253. [Google Scholar] [CrossRef]
- Barr, R.G.; Nakashima, K.; Amy, D.; Cosgrove, D.; Farrokh, A.; Schafer, F.; Bamber, J.C.; Castera, L.; Choi, B.I.; Chou, Y.-H.; et al. WFUMB Guidelines and Recommendations for Clinical Use of Ultrasound Elastography: Part 2: Breast. Ultrasound Med. Biol. 2015, 41, 1148–1160. [Google Scholar] [CrossRef] [PubMed]
- Ferraioli, G.; Filice, C.; Castera, L.; Choi, B.I.; Sporea, I.; Wilson, S.R.; David Cosgrove, C.F.D.; Barr, R. WFUMB guidelines and recommendations for clinical use of ultrasound elastography: Part 3: Liver. Ultrasound Med. Biol. 2015, 41, 1161–1179. [Google Scholar] [CrossRef] [PubMed]
- Barr, R.G.; Cosgrove, D.; Brock, M.; Cantisani, V.; Correas, J.M.; Postema, A.W.; Georg Salomon, M.T.; Dietrich, C.F. WFUMB guidelines and recommendations on the clinical use of ultrasound elastography: Part 5. Prostate. Ultrasound Med. Biol. 2017, 43, 27–48. [Google Scholar] [CrossRef] [PubMed]
- Cosgrove, D.; Barr, R.; Bojunga, J.; Cantisani, V.; Chammas, M.C.; Dighe, M.; Vinayak, S.; Xu, J.-M.; Dietrich, C.F. WFUMB Guidelines and Recommendations on the Clinical Use of Ultrasound Elastography: Part 4. Thyroid. Ultrasound Med. Biol. 2017, 43, 4–26. [Google Scholar] [CrossRef] [PubMed]
- Domenichini, R.; Pialat, J.-B.; Podda, A.; Aubry, S. Ultrasound elastography in tendon pathology: State of the art. Skelet. Radiol. 2017, 46, 1643–1655. [Google Scholar] [CrossRef] [PubMed]
- Brandenburg, J.E.; Eby, S.F.; Song, P.; Zhao, H.; Brault, J.S.; Chen, S.; An, K.-N. Ultrasound Elastography: The New Frontier in Direct Measurement of Muscle Stiffness. Arch. Phys. Med. Rehabil. 2014, 95, 2207–2219. [Google Scholar] [CrossRef]
- Lin, C.-Y.; Lin, C.-C.; Chou, Y.-C.; Chen, P.-Y.; Wang, C.-L. Heel Pad Stiffness in Plantar Heel Pain by Shear Wave Elastography. Ultrasound Med. Biol. 2015, 41, 2890–2898. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.-Y.; Chen, P.-Y.; Shau, Y.-W.; Tai, H.-C.; Wang, C.-L. Spatial-dependent mechanical properties of the heel pad by shear wave elastography. J. Biomech. 2017, 53, 191–195. [Google Scholar] [CrossRef]
- Lin, C.-Y.; Wu, C.-H.; Özçakar, L. Restoration of Heel Pad Elasticity in Heel Pad Syndrome Evaluated by Shear Wave Elastography. Am. J. Phys. Med. Rehabil. 2017, 96, e96. [Google Scholar] [CrossRef] [PubMed]
- Deng, C.X.; Hong, X.; Stegemann, J.P. Ultrasound Imaging Techniques for Spatiotemporal Characterization of Composition, Microstructure, and Mechanical Properties in Tissue Engineering. Tissue Eng. Part B Rev. 2016, 22, 311–321. [Google Scholar] [CrossRef] [PubMed]
- Hong, X.; Stegemann, J.P.; Deng, C.X. Microscale characterization of the viscoelastic properties of hydrogel biomaterials using dual-mode ultrasound elastography. Biomaterials 2016, 88, 12–24. [Google Scholar] [CrossRef]
- Hong, X.; Annamalai, R.T.; Kemerer, T.S.; Deng, C.X.; Stegemann, J.P. Multimode ultrasound viscoelastography for three-dimensional interrogation of microscale mechanical properties in heterogeneous biomaterials. Biomaterials 2018, 178, 11–22. [Google Scholar] [CrossRef] [PubMed]
- Doherty, J.R.; Trahey, G.E.; Nightingale, K.R.; Palmeri, M.L. Acoustic radiation force elasticity imaging in diagnostic ultrasound. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 685–701. [Google Scholar] [CrossRef] [PubMed]
- Palmeri, M.L.; Nightingale, K.R. Acoustic radiation force-based elasticity imaging methods. Interface Focus 2011, 1, 553–564. [Google Scholar] [CrossRef]
- Kim, W.; Ferguson, V.L.; Borden, M.; Neu, C.P. Application of Elastography for the Noninvasive Assessment of Biomechanics in Engineered Biomaterials and Tissues. Ann. Biomed. Eng. 2016, 44, 705–724. [Google Scholar] [CrossRef] [PubMed]
- Ryu, J.; Jeong, W.K. Current status of musculoskeletal application of shear wave elastography. Ultrason. 2017, 36, 185–197. [Google Scholar] [CrossRef]
- Garteiser, P.; Doblas, S.; Daire, J.-L.; Wagner, M.; Leitao, H.; Vilgrain, V.; Sinkus, R.; Van Beers, B.E. MR elastography of liver tumours: Value of viscoelastic properties for tumour characterisation. Eur. Radiol. 2012, 22, 2169–2177. [Google Scholar] [CrossRef]
- Qiu, Y.; Sridhar, M.; Tsou, J.K.; Lindfors, K.K.; Insana, M.F. Ultrasonic Viscoelasticity Imaging of Nonpalpable Breast Tumors: Preliminary Results. Acad. Radiol. 2008, 15, 1526–1533. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Montagnon, E.; Tripette, J.; Mfoumou, E.; Cloutier, G. Acoustic radiation force induced elastography (ARFIRE): A new method to characterize blood clot viscoelastic properties. In Proceedings of the 2012 IEEE International Ultrasonics Symposium, Dresden, Germany, 7–10 October 2012; pp. 13–16. [Google Scholar]
- Carrascal, C.A. Viscoelastic Creep Imaging. In Ultrasound Elastography for Biomedical Applications and Medicine; John Wiley & Sons: Hoboken, NJ, USA, 2018; pp. 171–188. [Google Scholar] [CrossRef]
- Walker, W.F.; Fernandez, F.J.; Negron, L.A. A method of imaging viscoelastic parameters with acoustic radiation force. Phys. Med. Biol. 2000, 45, 1437–1447. [Google Scholar] [CrossRef] [PubMed]
- Viola, F.; Walker, W.F. Radiation force imaging of viscoelastic properties with reduced artifacts. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2003, 50, 736–742. [Google Scholar] [CrossRef]
- Mauldin, F.; Haider, M.; Loboa, E.; Behler, R.; Euliss, L.; Pfeiler, T.; Gallippi, C. Monitored steady-state excitation and recovery (MSSR) radiation force imaging using viscoelastic models. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2008, 55, 1597–1610. [Google Scholar] [CrossRef]
- Amador, C.; Urban, M.W.; Chen, S.; Greenleaf, J.F. Loss tangent and complex modulus estimated by acoustic radiation force creep and shear wave dispersion. Phys. Med. Biol. 2012, 57, 1263. [Google Scholar] [CrossRef]
- Amador, C.; Urban, M.W.; Chen, S.; Greenleaf, J.F. Complex shear modulus quantification from acoustic radiation force creep-recovery and shear wave propagation. In Proceedings of the 2012 IEEE International Ultrasonics Symposium, Dresden, Germany, 7–10 October 2012; pp. 1850–1853. [Google Scholar]
- Amador, C.; Qiang, B.; Urban, M.W.; Chen, S.; Greenleaf, J.F. Acoustic radiation force creep-recovery: Theory and finite element modeling. In Proceedings of the 2013 IEEE International Ultrasonics Symposium (IUS), Prague, Czech Republic, 21–25 July 2013; pp. 363–366. [Google Scholar]
- Selzo, M.R.; Gallippi, C.M. Viscoelastic response (VisR) imaging for assessment of viscoelasticity in voigt materials. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2013, 60, 2488–2500. [Google Scholar] [CrossRef]
- Nabavizadeh, A.; Kinnick, R.R.; Bayat, M.; Amador, C.; Urban, M.W.; Alizad, A.; Fatemi, M. Automated compression device for viscoelasticity imaging. IEEE Trans. Biomed. Eng. 2016, 64, 1535–1546. [Google Scholar] [CrossRef] [PubMed]
- Bayat, M.; Nabavizadeh, A.; Kumar, V.; Gregory, A.; Insana, M.; Alizad, A.; Fatemi, M. Automated In Vivo Sub-Hertz Analysis of Viscoelasticity (SAVE) for Evaluation of Breast Lesions. IEEE Trans. Biomed. Eng. 2017, 65, 2237–2247. [Google Scholar] [CrossRef]
- Lin, C.-Y. Alternative Form of Standard Linear Solid Model for Characterizing Stress Relaxation and Creep: Including a Novel Parameter for Quantifying the Ratio of Fluids to Solids of a Viscoelastic Solid. Front. Mater. 2020, 7, 11. [Google Scholar] [CrossRef]
- Da Silva, R.J.B. Setting Target Measurement Uncertainty in Water Analysis. Water 2013, 5, 1279–1302. [Google Scholar] [CrossRef]
- Baldewsing, R.A.; de Korte, C.L.; Schaar, J.A.; Mastik, F.; van der Steen, A.F. Finite element modeling and intravascular ultrasound elastography of vulnerable plaques: Parameter variation. Ultrasonics 2004, 42, 723–729. [Google Scholar] [CrossRef] [PubMed]
- Caenen, A.; Shcherbakova, D.; Verhegghe, B.; Papadacci, C.; Pernot, M.; Segers, P.; Swillens, A. A versatile and experimentally validated finite element model to assess the accuracy of shear wave elastography in a bounded viscoelastic medium. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2015, 62, 439–450. [Google Scholar] [CrossRef] [PubMed]
- Maksuti, E.; Bini, F.; Fiorentini, S.; Blasi, G.; Urban, M.W.; Marinozzi, F.; Larsson, M. Influence of wall thickness and diameter on arterial shear wave elastography: A phantom and finite element study. Phys. Med. Biol. 2017, 62, 2694–2718. [Google Scholar] [CrossRef] [PubMed]
- Pasyar, P.; Arabalibeik, H.; Mohammadi, M.; Rezazadeh, H.; Sadeghi, V.; Askari, M.; Mirbagheri, A. Ultrasound elastography using shear wave interference patterns: A finite element study of affecting factors. Phys. Eng. Sci. Med. 2021, 44, 253–263. [Google Scholar] [CrossRef] [PubMed]
- Hollis, L.; Barnhill, E.; Conlisk, N.; Thomas-Seale, L.E.; Roberts, N.; Pankaj, P.; Hoskins, P.R. Finite element analysis to compare the accuracy of the direct and mdev inversion algorithms in MR elastography. IAENG Int. J. Comput. Sci. 2016, 43, 137–146. [Google Scholar]
- Hollis, L.; Thomas-Seale, L.; Conlisk, N.; Roberts, N.; Pankaj, P.; Hoskins, P.R. Investigation of modelling parameters for finite element analysis of MR elastography. In Computational Biomechanics for Medicine; Springer: Cham, Switzerland, 2016; pp. 75–84. [Google Scholar]
- Thomas-Seale LE, J.; Hollis, L.; Klatt, D.; Sack, I.; Roberts, N.; Pankaj, P.; Hoskins, P.R. The simulation of magnetic resonance elastography through atherosclerosis. J. Biomech. 2016, 49, 1781–1788. [Google Scholar] [CrossRef]
- Hollis, L.; Barnhill, E.; Perrins, M.; Kennedy, P.; Conlisk, N.; Brown, C.; Hoskins, P.R.; Pankaj, P.; Roberts, N. Finite element analysis to investigate variability of MR elastography in the human thigh. Magn. Reson. Imaging 2017, 43, 27–36. [Google Scholar] [CrossRef]
- Lin, C.Y.; Lin, S.R. Investigating the accuracy of ultrasound viscoelastic creep imaging for measuring the viscoelastic properties of a single-inclusion phantom. Int. J. Mech. Sci. 2021, 199, 106409. [Google Scholar] [CrossRef]





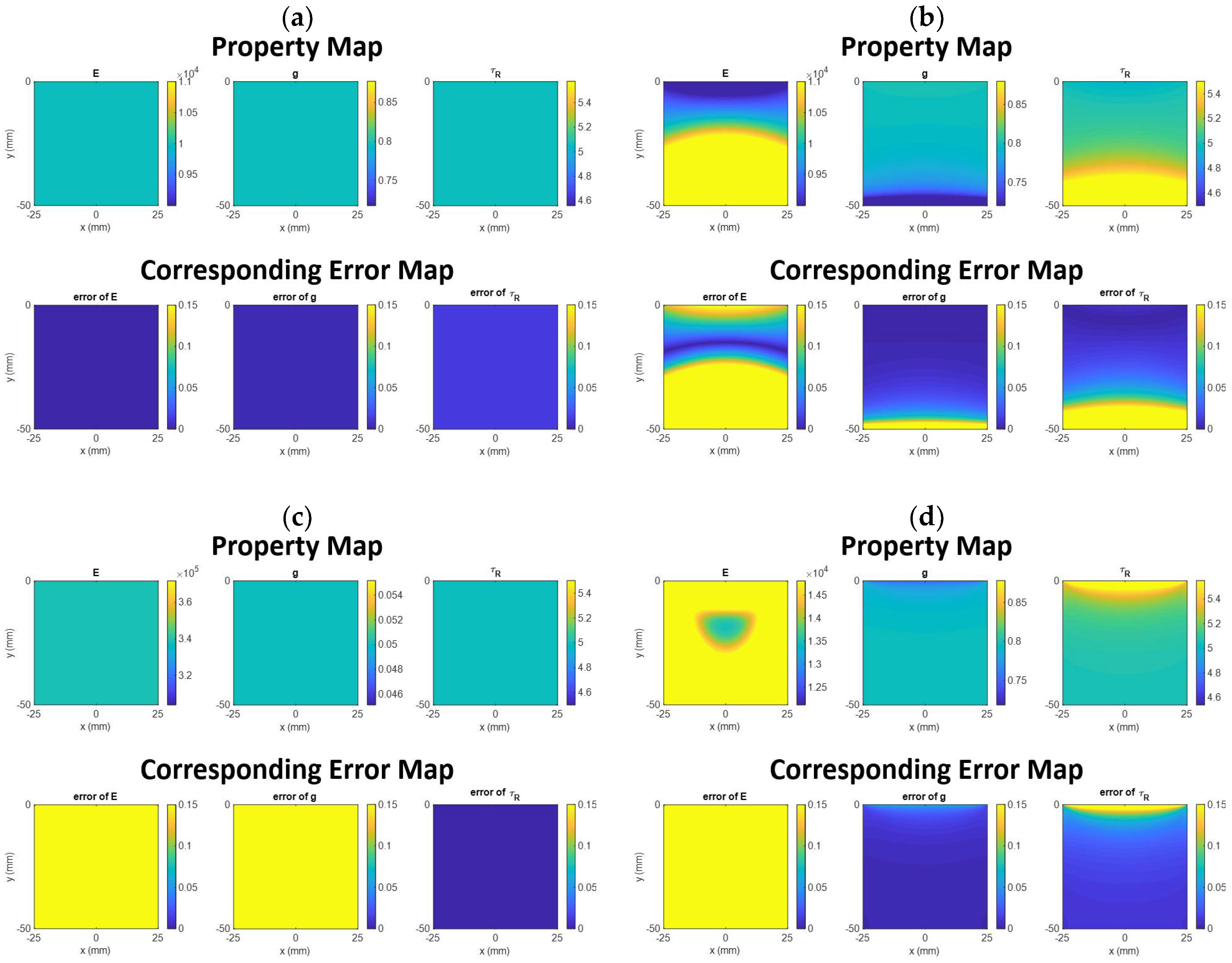
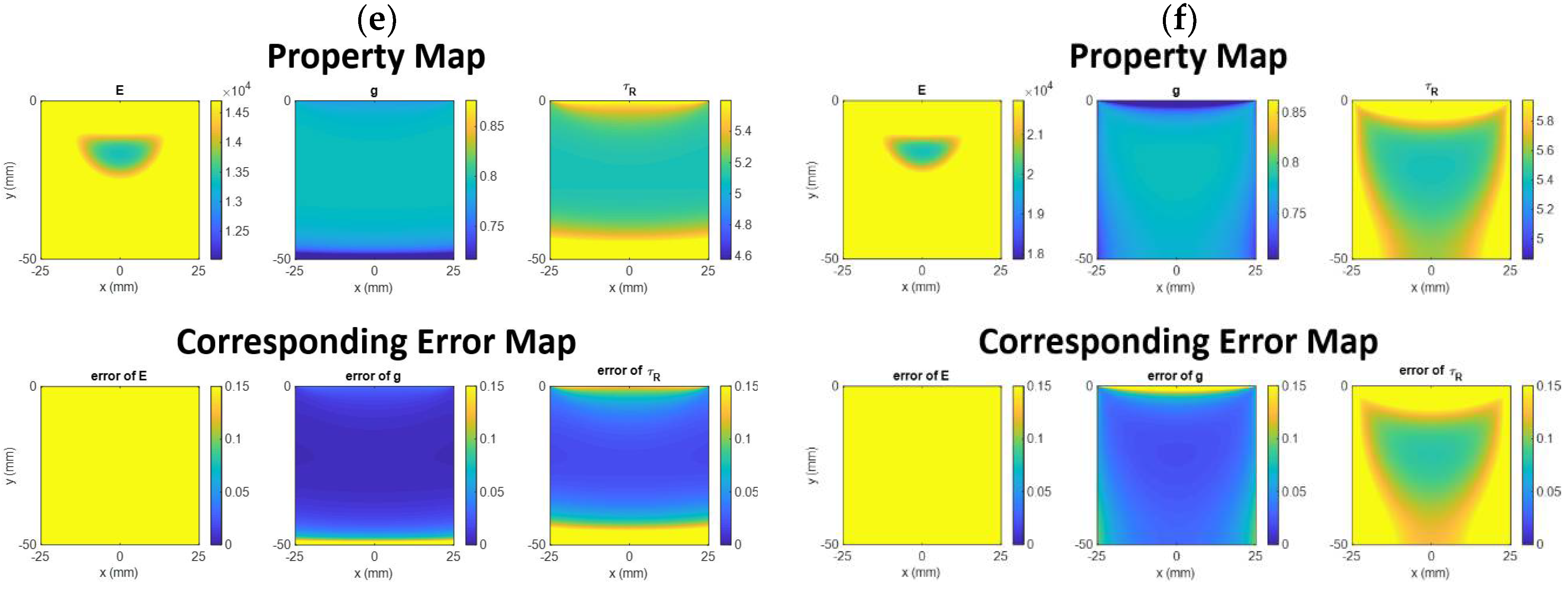
| Simulation Test Number | Percentage of the Region in the Map Having Accurate Measurement (%) | ||
|---|---|---|---|
| E | |||
| 1 | 100 | 100 | 100 |
| 2 | 37.28 | 77.50 | 92.42 |
| 3 | 0 | 100 | 0 |
| 4 | 0 | 93.84 | 100 |
| 5 | 0 | 83.16 | 95.94 |
| 6 | 0 | 23.24 | 96.18 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, C.-Y.; Chang, K.-V. Effects of Loading and Boundary Conditions on the Performance of Ultrasound Compressional Viscoelastography: A Computational Simulation Study to Guide Experimental Design. Materials 2021, 14, 2590. https://doi.org/10.3390/ma14102590
Lin C-Y, Chang K-V. Effects of Loading and Boundary Conditions on the Performance of Ultrasound Compressional Viscoelastography: A Computational Simulation Study to Guide Experimental Design. Materials. 2021; 14(10):2590. https://doi.org/10.3390/ma14102590
Chicago/Turabian StyleLin, Che-Yu, and Ke-Vin Chang. 2021. "Effects of Loading and Boundary Conditions on the Performance of Ultrasound Compressional Viscoelastography: A Computational Simulation Study to Guide Experimental Design" Materials 14, no. 10: 2590. https://doi.org/10.3390/ma14102590
APA StyleLin, C.-Y., & Chang, K.-V. (2021). Effects of Loading and Boundary Conditions on the Performance of Ultrasound Compressional Viscoelastography: A Computational Simulation Study to Guide Experimental Design. Materials, 14(10), 2590. https://doi.org/10.3390/ma14102590