A Class of Rate-Independent Lower-Order Gradient Plasticity Theories: Implementation and Application to Disc Torsion Problem

 ,
,  and
and
Abstract
:1. Introduction
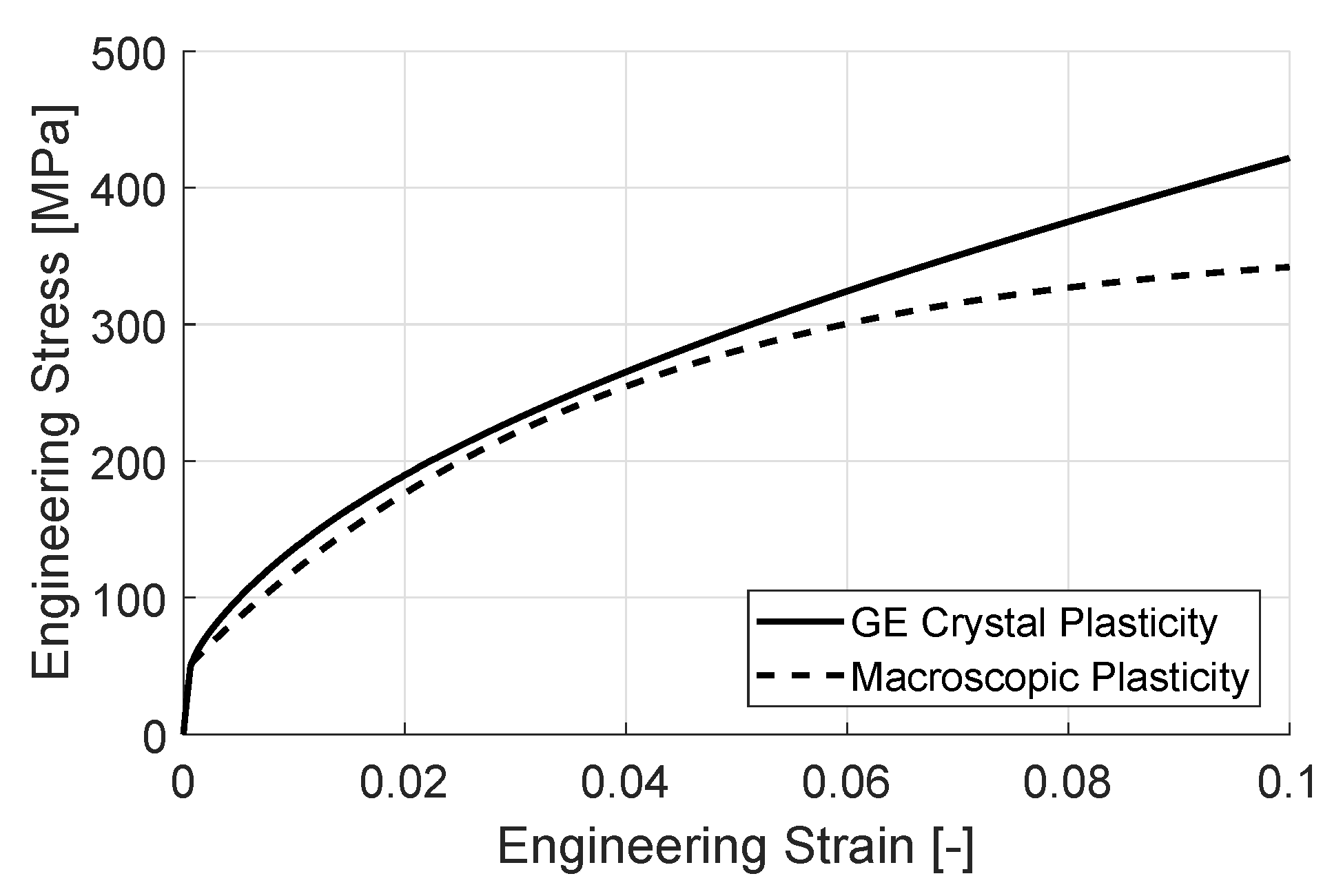
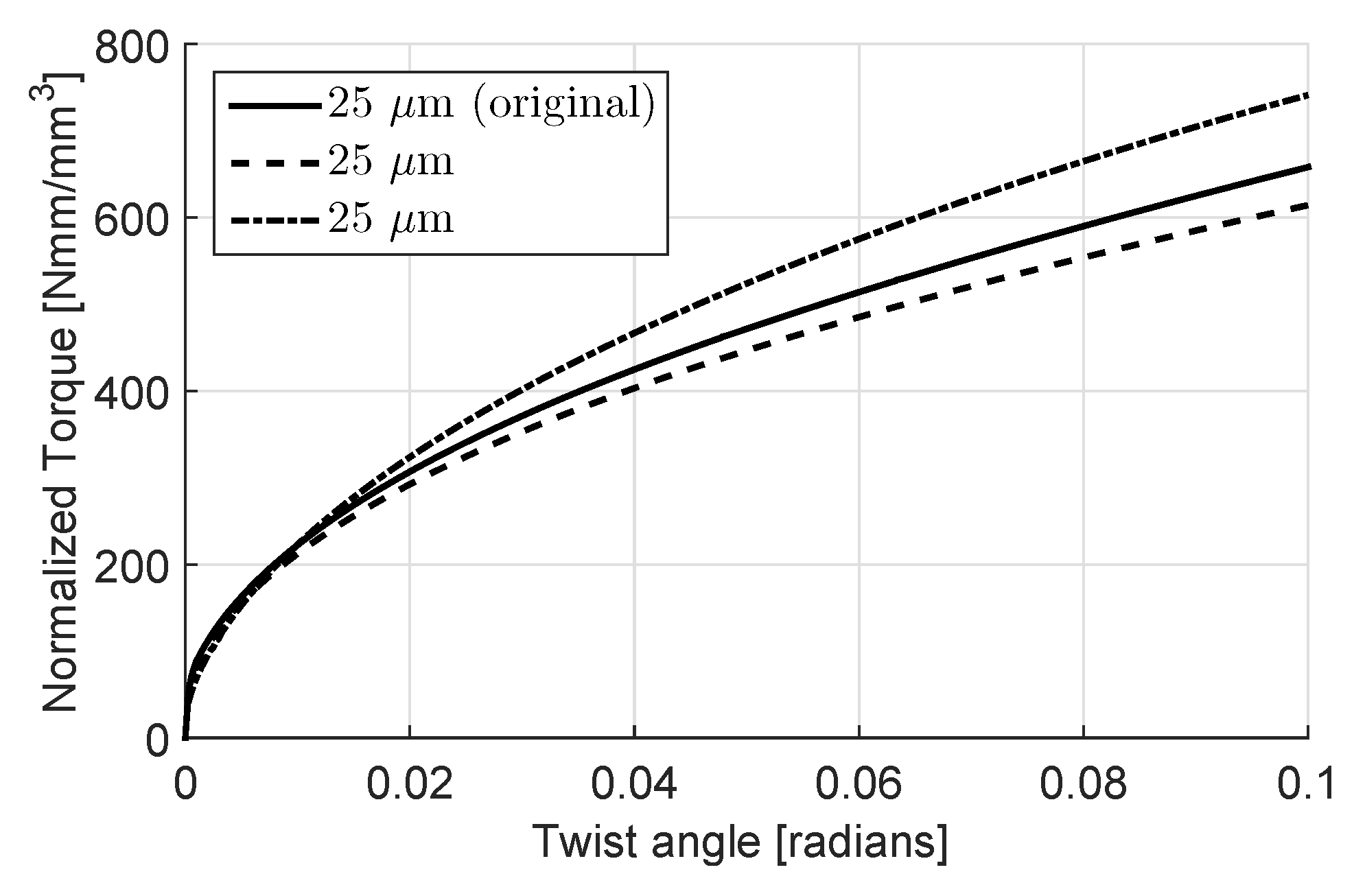
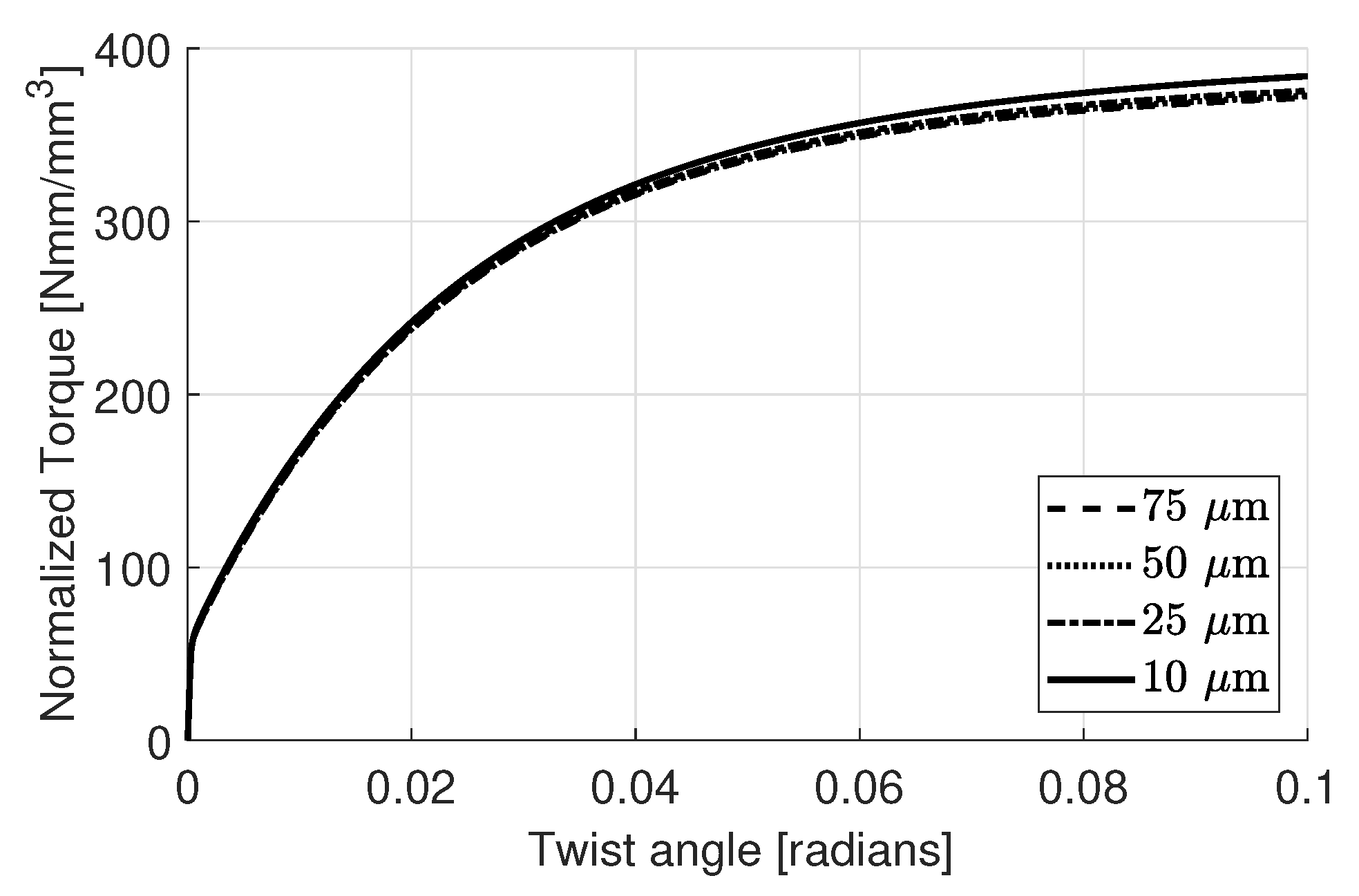
- A comparison of gradient enhanced theories with phenomenological and micromechanical plasticity models is carried out considering their formulations as well as their associated responses in disc torsion simulations.
- As opposed to the commonly used rate-regularized formulations in the context, rate-independent plasticity models are considered. This choice is crucial especially for problems where strain rate gradients prevail for which viscous regularization might cause an uneven and non-physical treatment of material points in the whole problem domain.
- The used discrete gradient method does not require a regular lattice. Moreover, the explicit nature of the utilized implementation does not impose a restriction on the selected finite element technology. Thus, the developed gradient framework proves to be robust and mesh independent.
2. Theory
2.1. Constitutive Models
2.1.1. Macroscopic Plasticity
2.1.2. Crystal Plasticity
2.2. Hardening
2.2.1. Macroscopic Plasticity
2.2.2. Crystal Plasticity
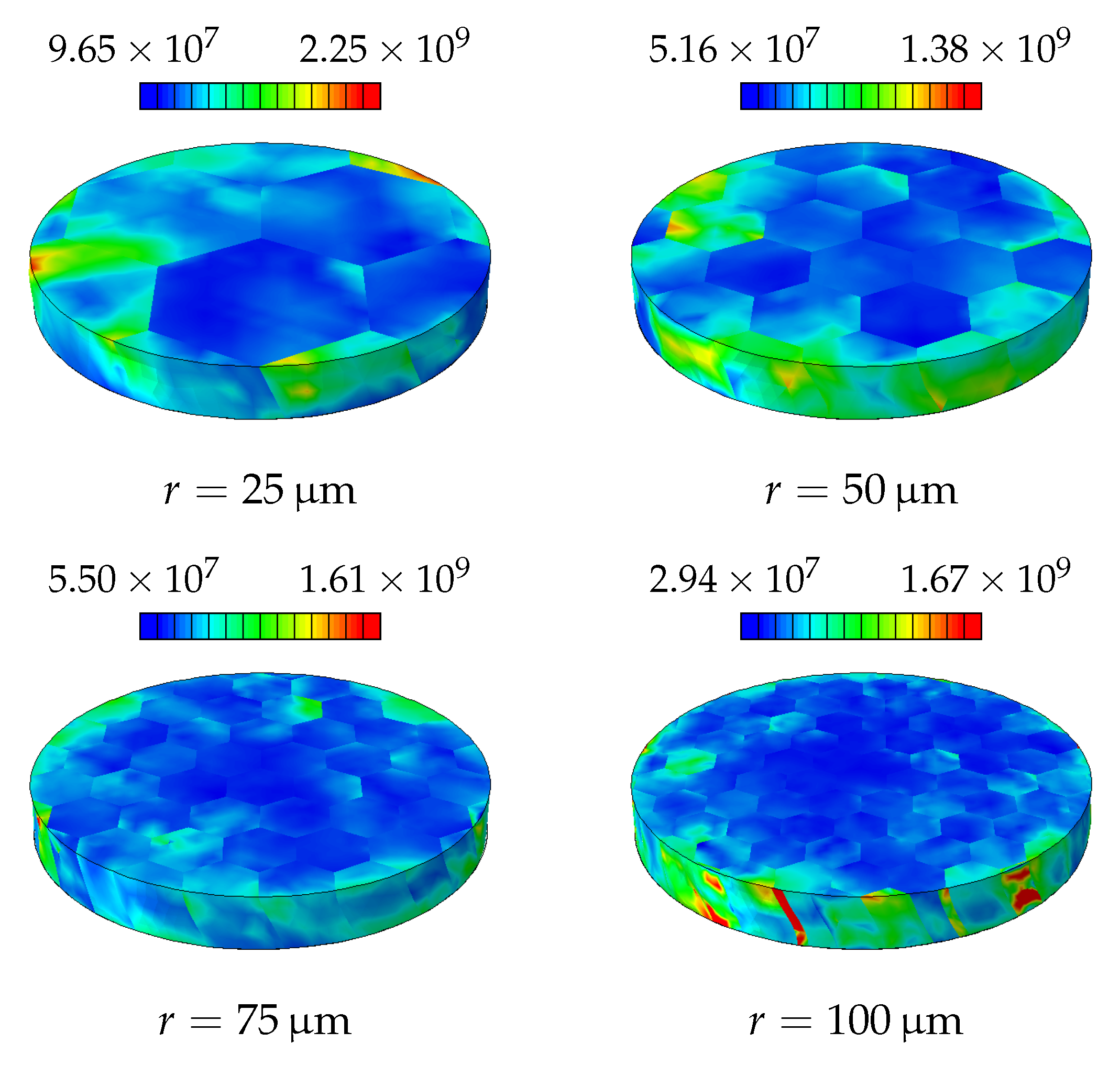
2.3. GND Density
2.3.1. Crystal Plasticity
2.3.2. Macroscopic Plasticity
3. Implementation
3.1. Rate-Independent Macroscopic Plasticity
3.2. Rate-Independent Crystal Plasticity
3.3. Gradient Computation
3.4. Global Solution Scheme
| Algorithm 1. Equilibrium solution scheme including gradient computation and user defined material in the commercial FE software package Abaqus. |
| ⋮ increment n USDFLD: assign or → SDV UMAT: global iterations using SDV USDFLD: compute or increment USDFLD: assign or → SDV UMAT: global iterations using SDV USDFLD: compute or ⋮ |
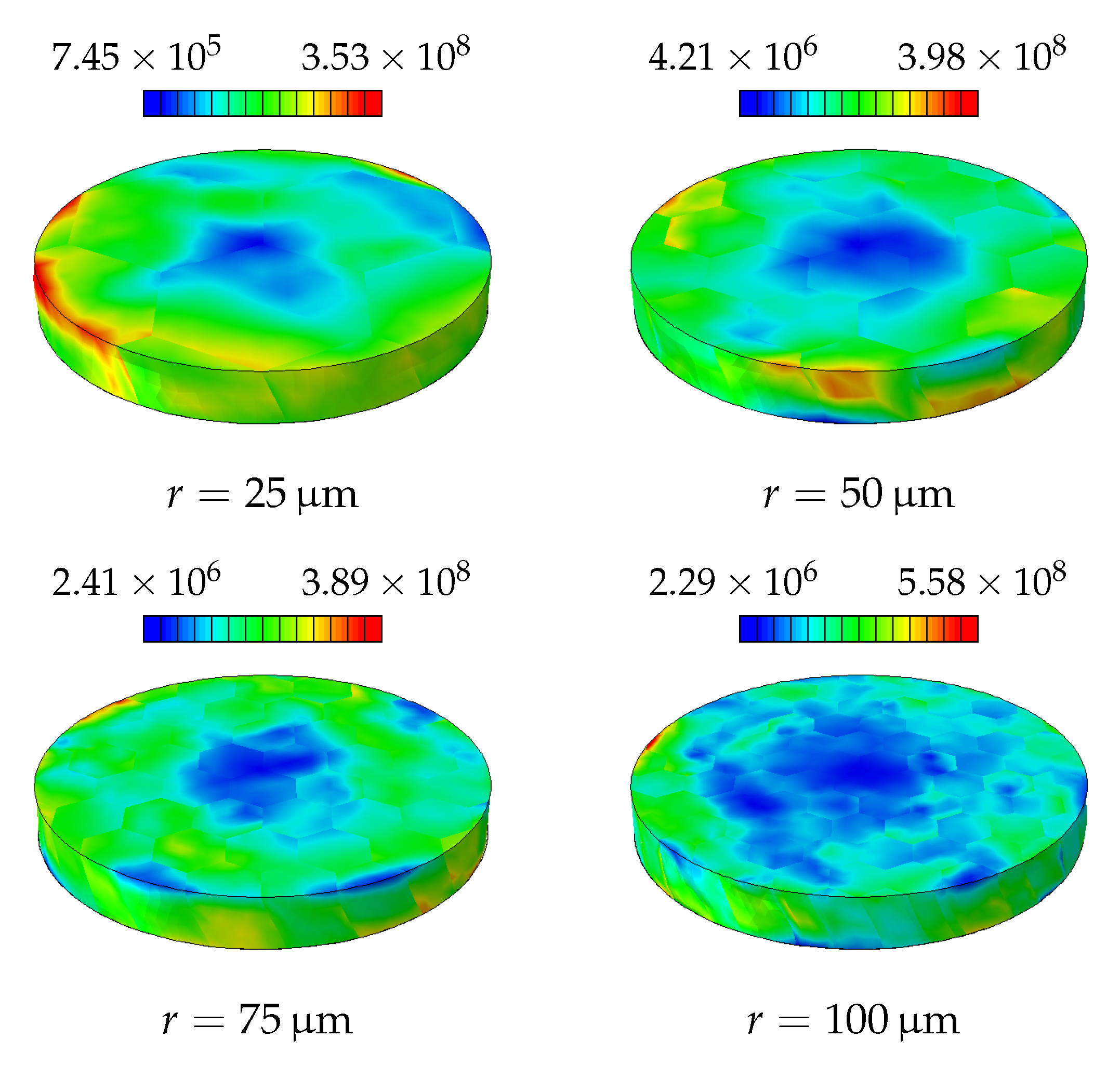
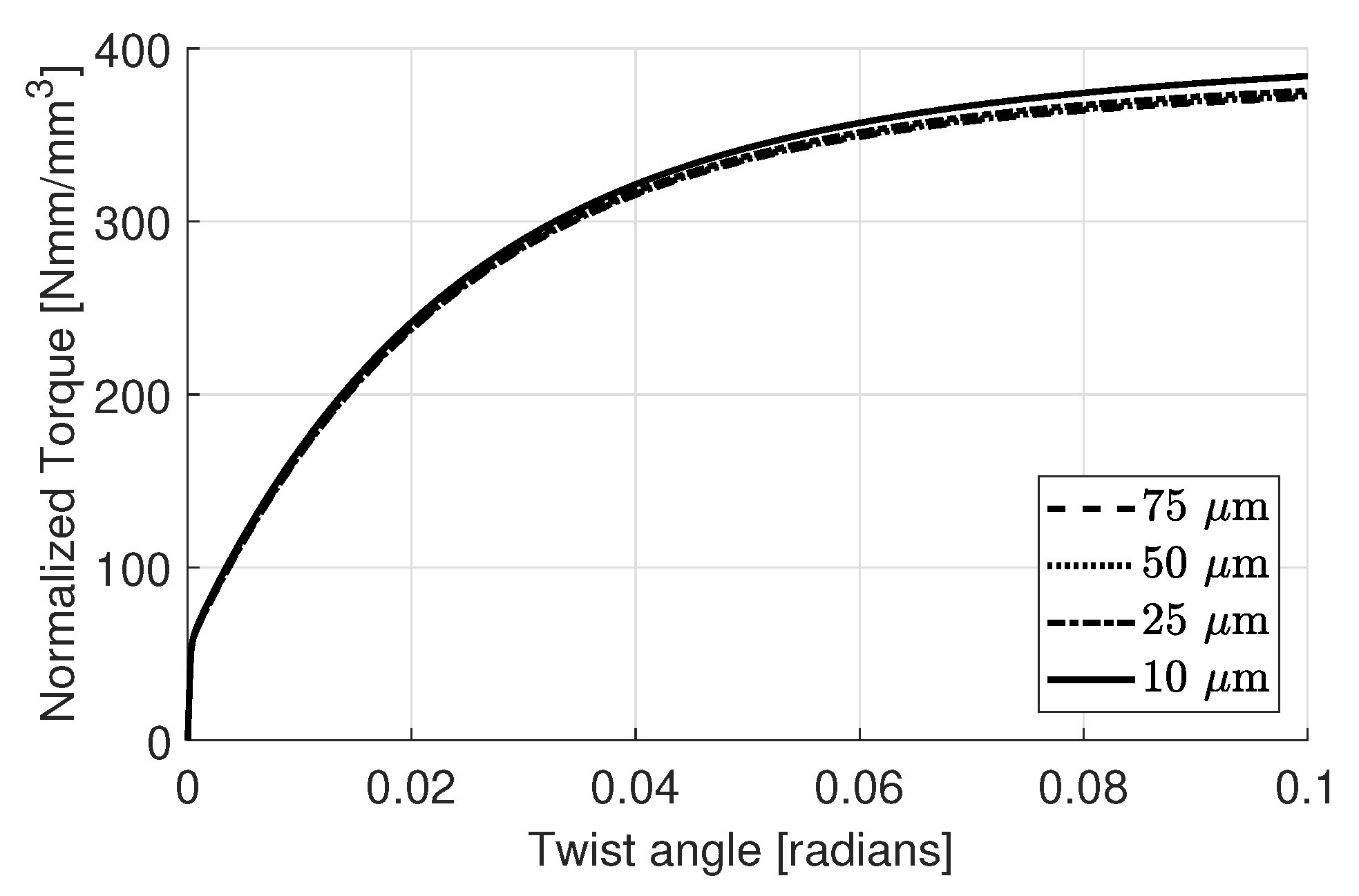
4. Application and Results
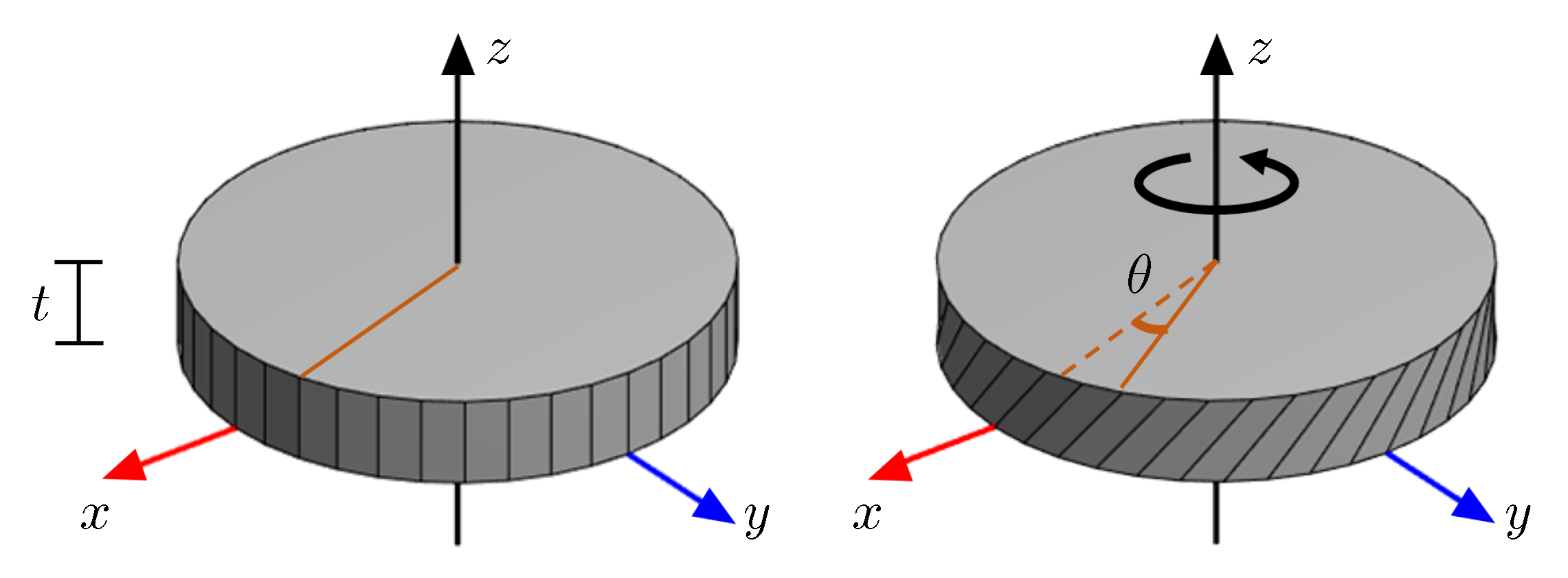
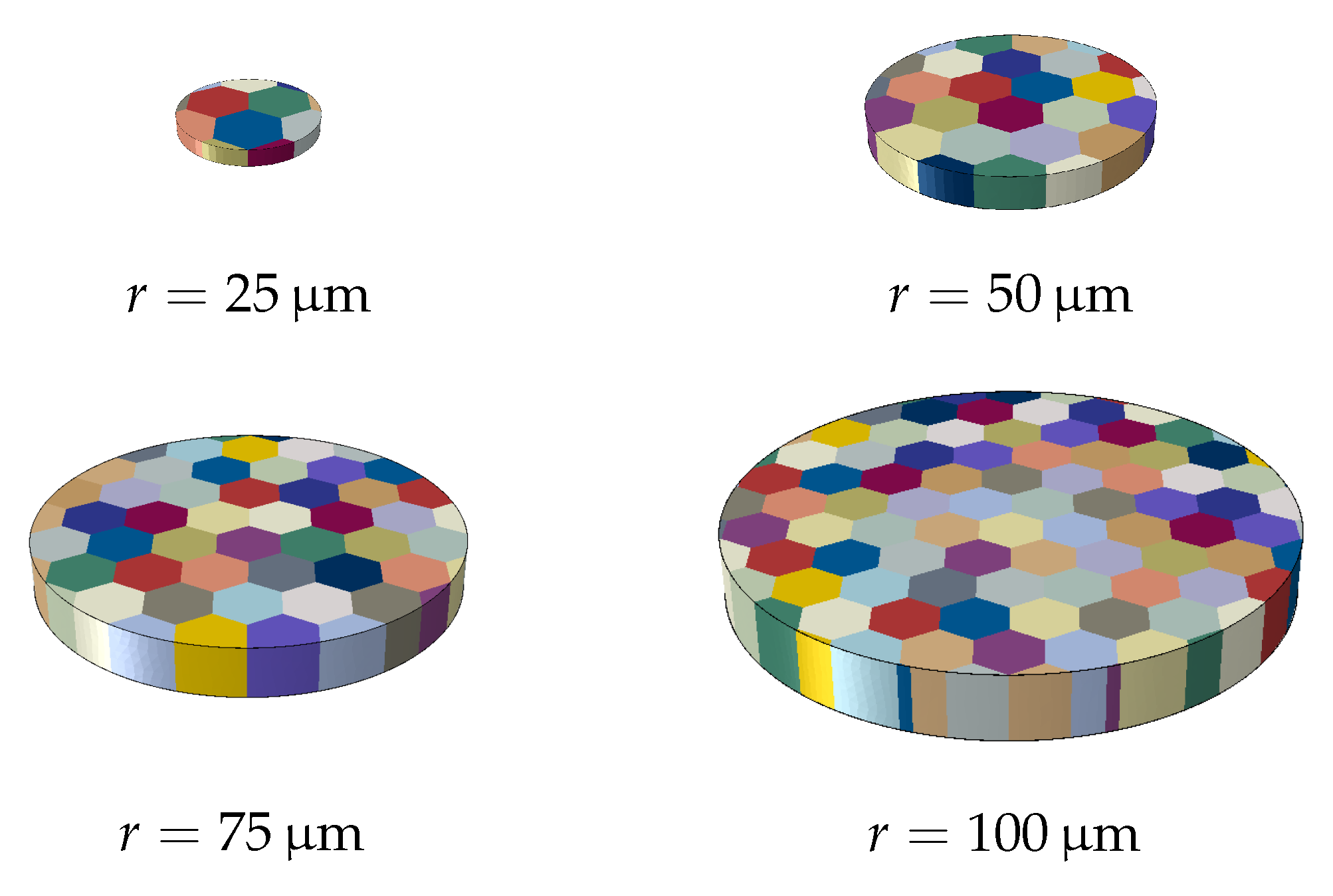
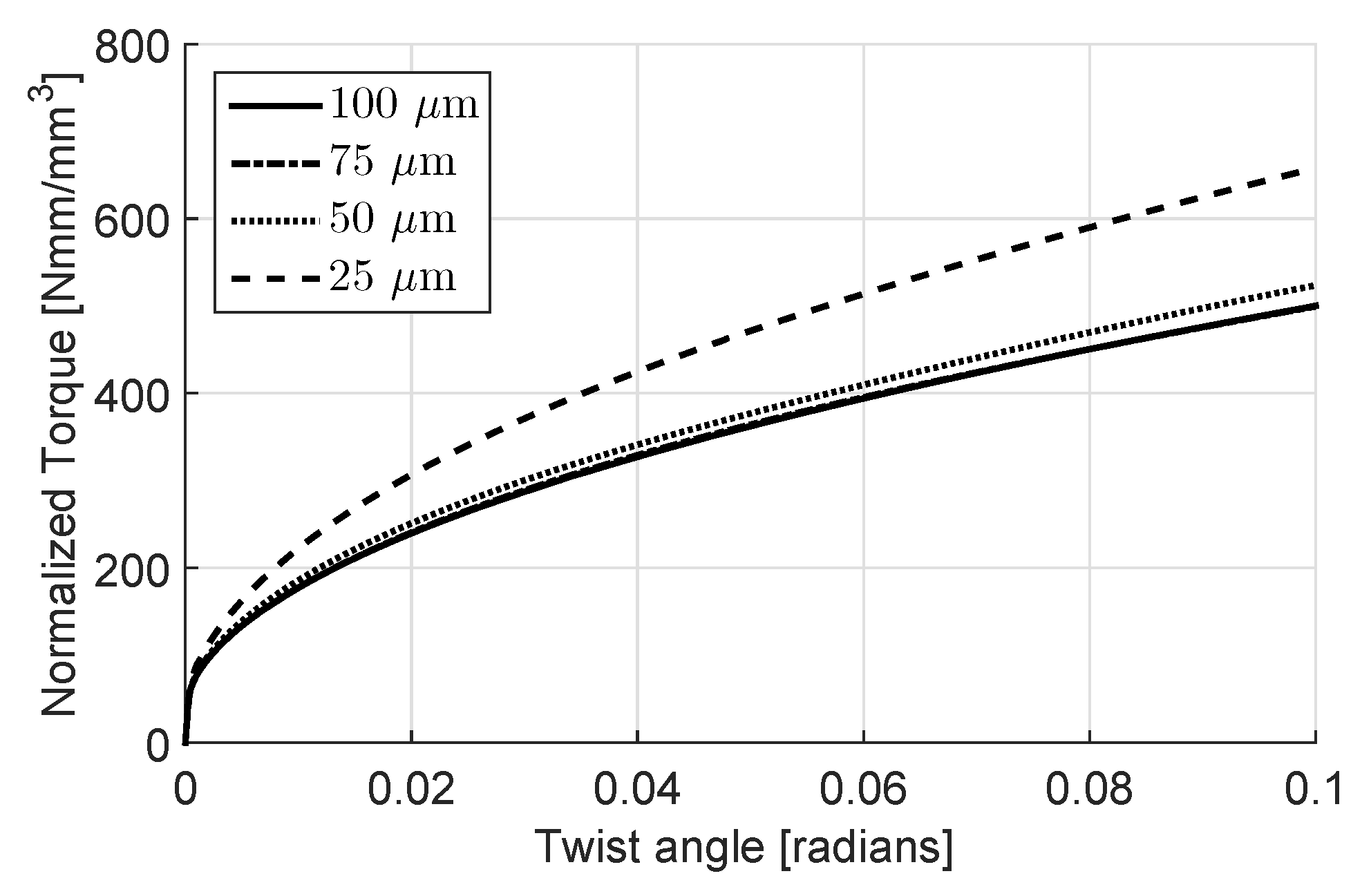
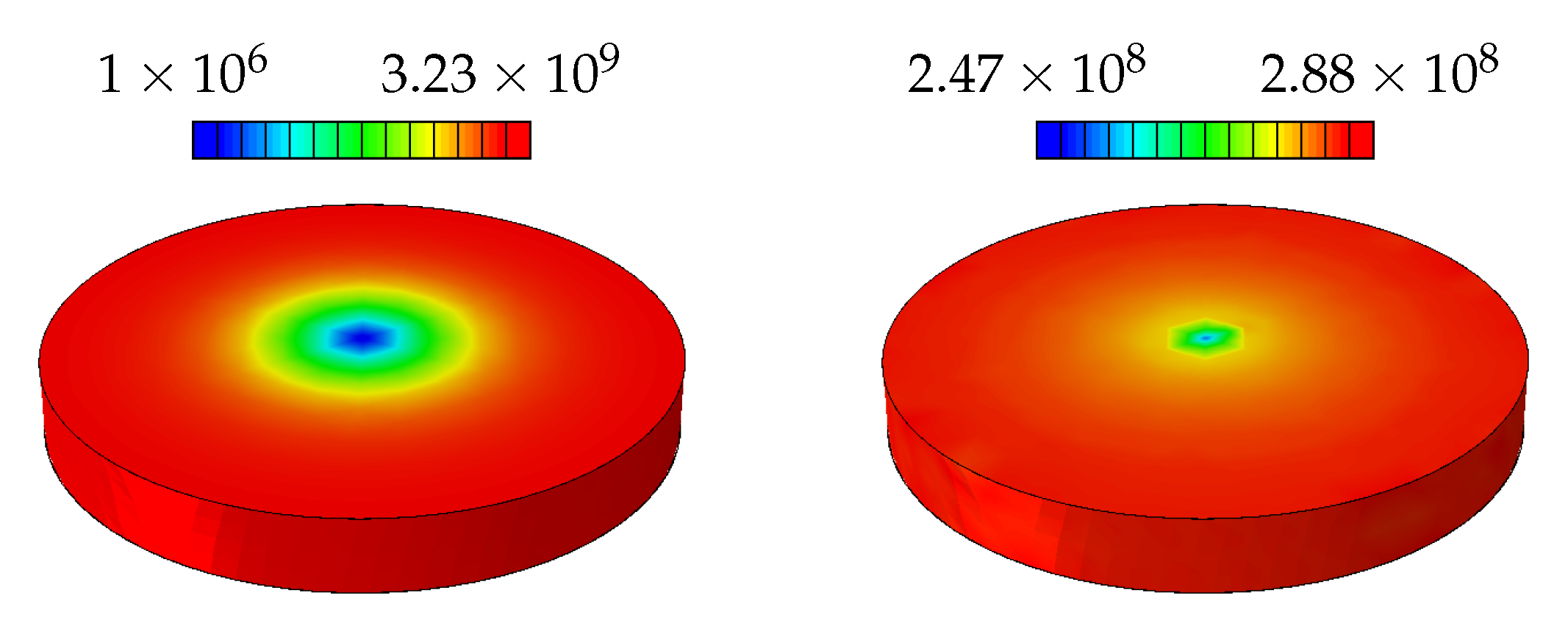
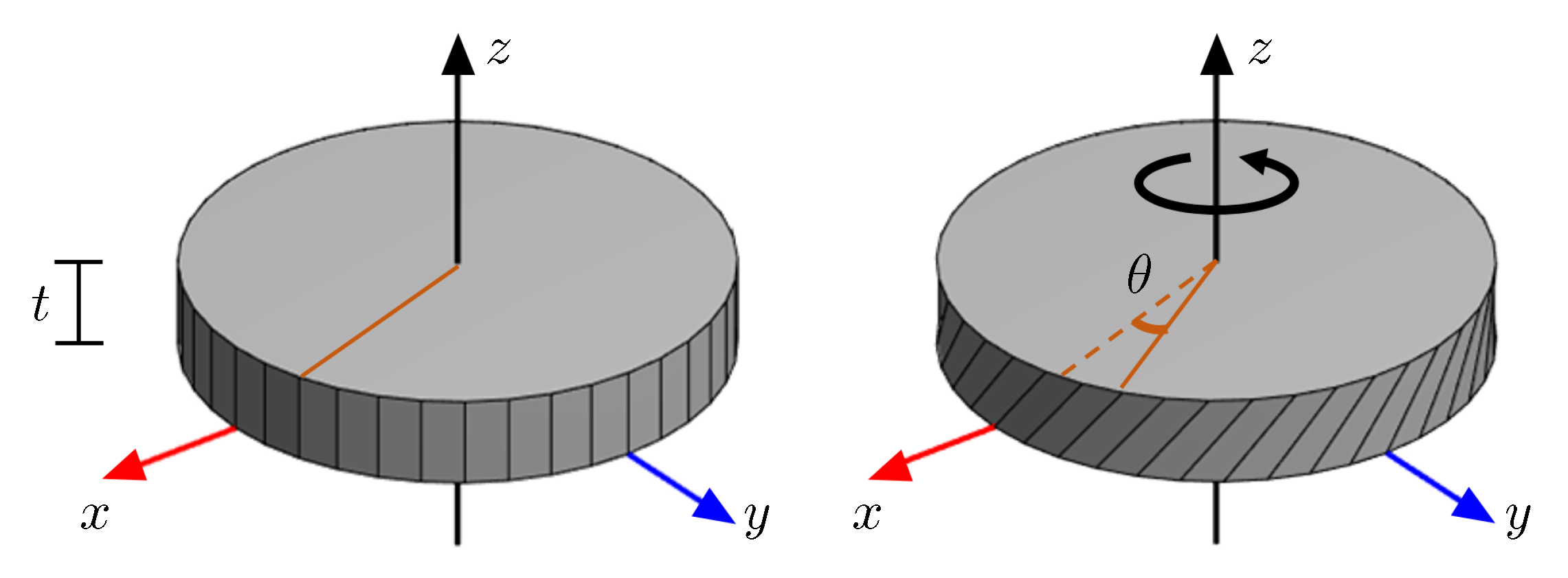
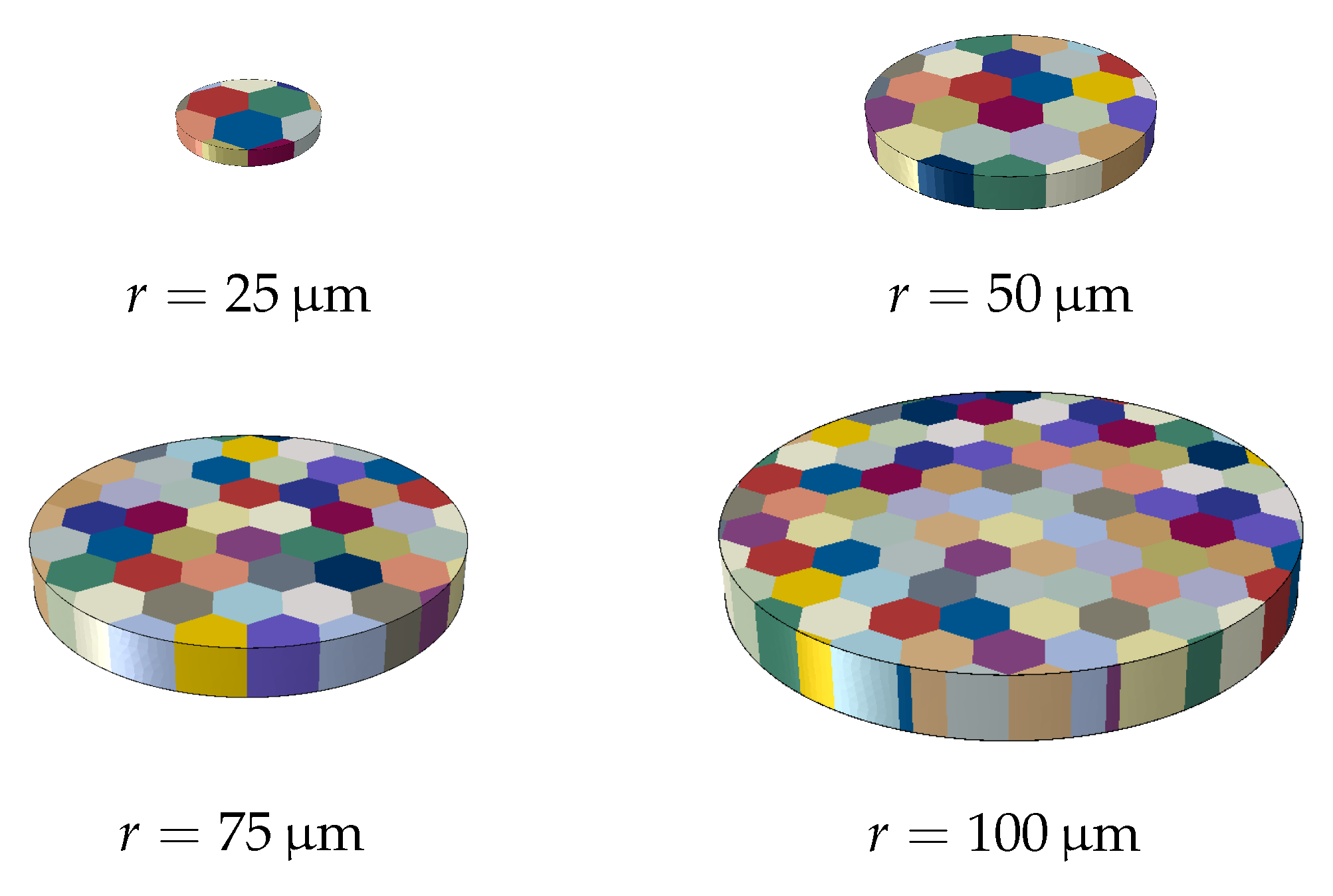
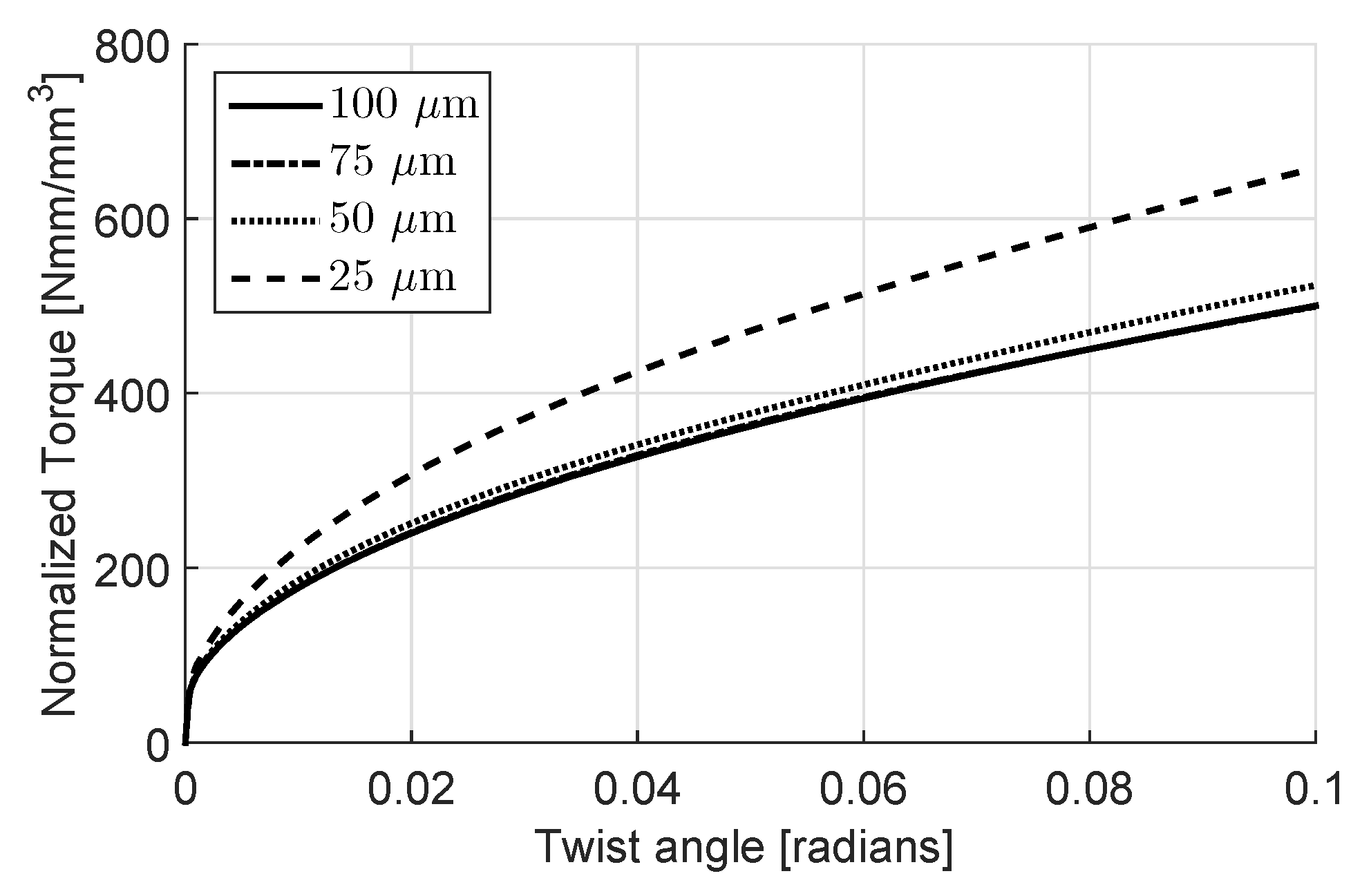
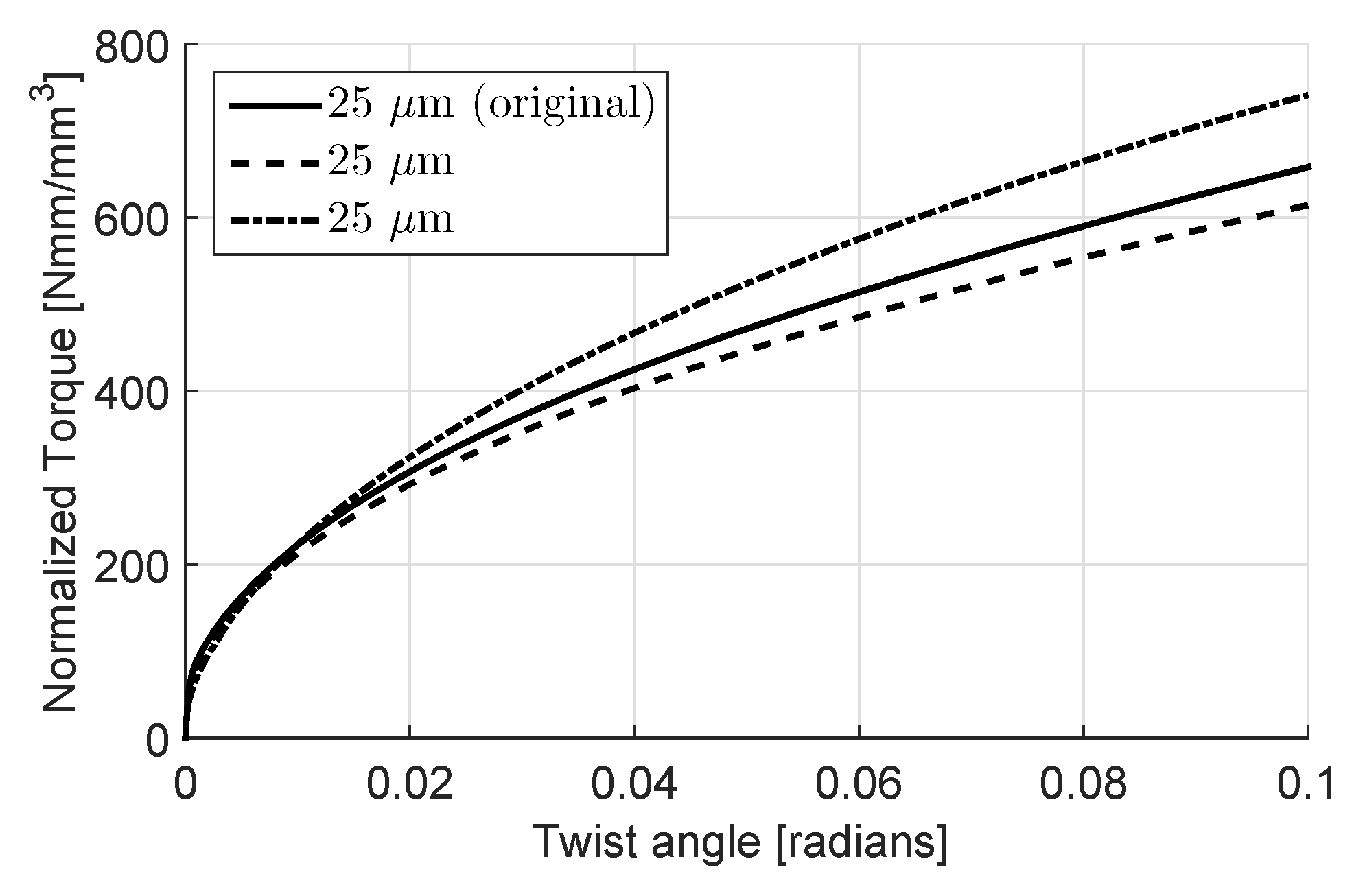
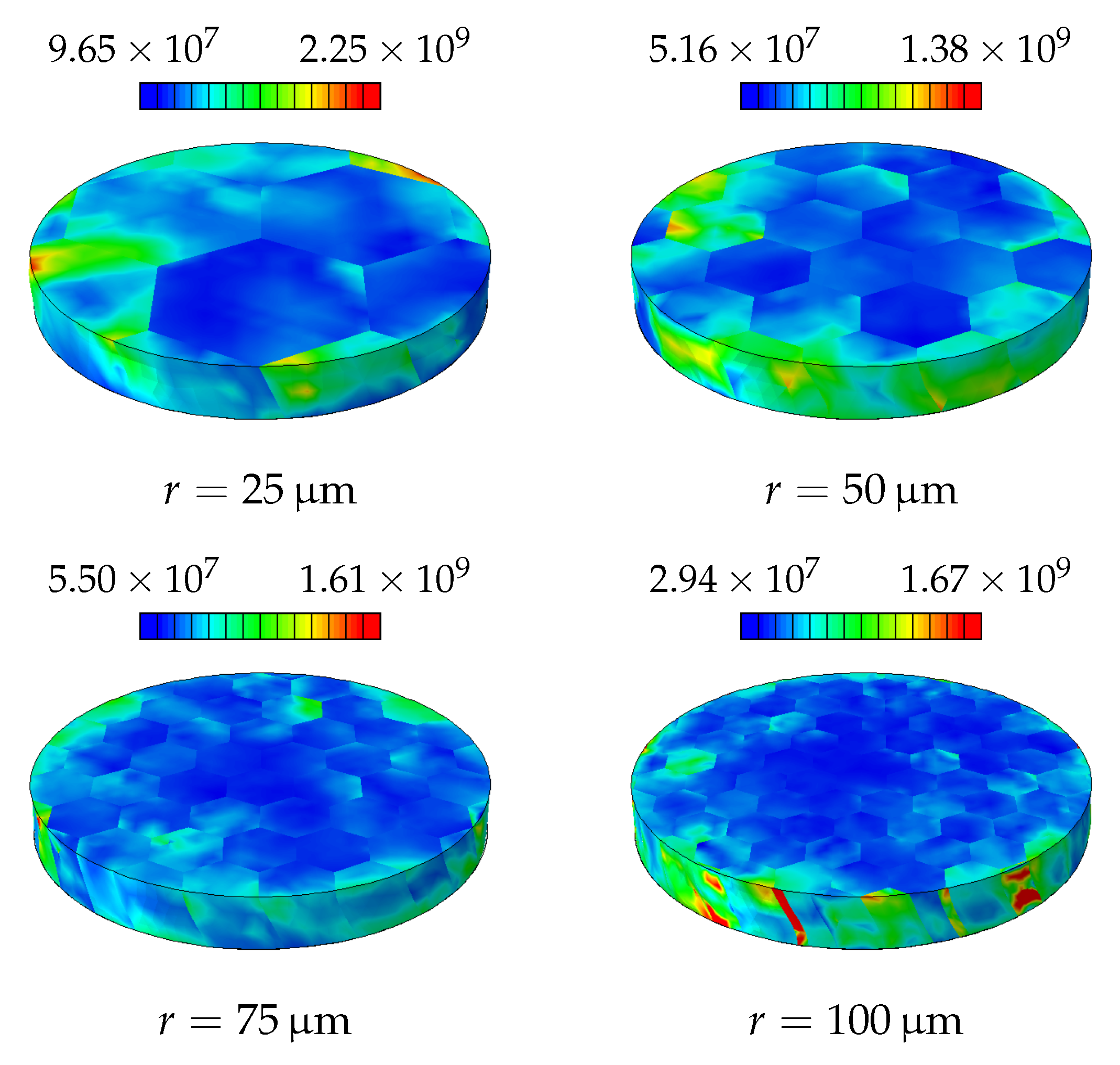
4.1. Disc Torsion
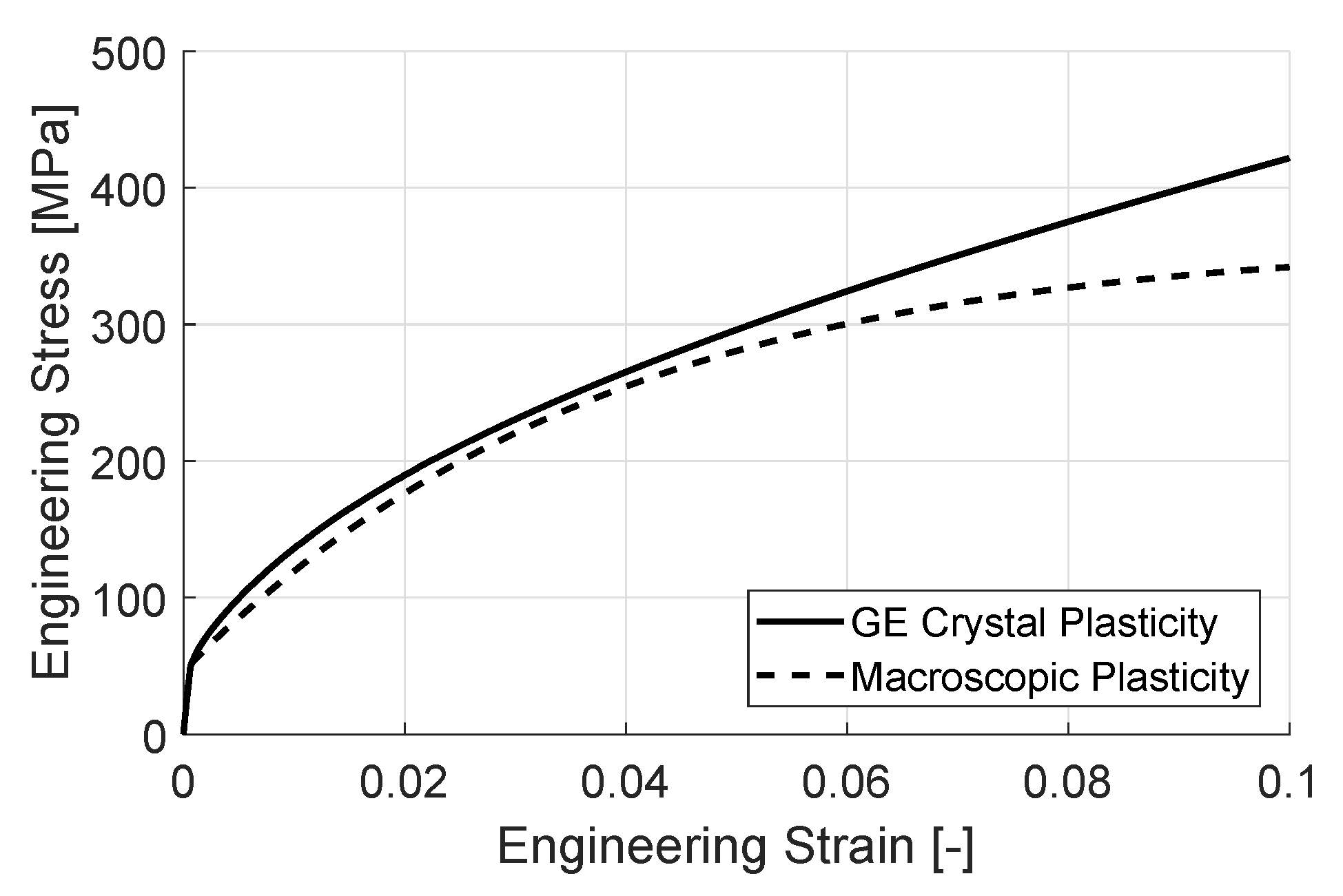
4.2. Parameter Identification
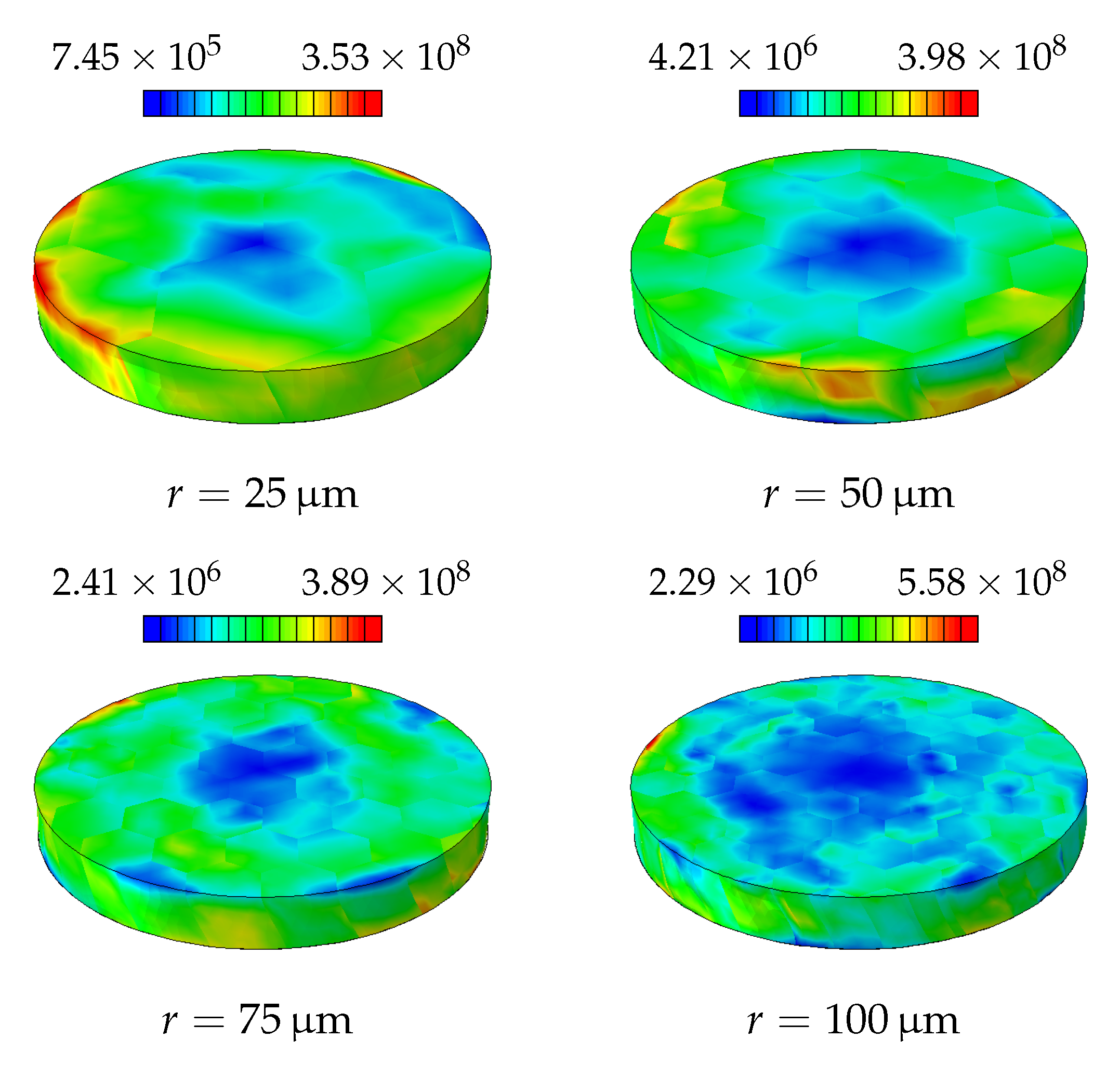
4.3. Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ashby, M.F. The deformation of plastically non-homogeneous materials. Philos. Mag. 1970, 21, 399–424. [Google Scholar] [CrossRef]
- Acharya, A.; Bassani, J. Lattice incompatibility and a gradient theory of crystal plasticity. J. Mech. Phys. Solids 2000, 48, 1565–1595. [Google Scholar] [CrossRef]
- Nye, J.F. Some geometrical relations in dislocated crystals. Acta Metall. 1953, 1, 153–162. [Google Scholar] [CrossRef]
- Fleck, N.; Muller, G.; Ashby, M.; Hutchinson, J. Strain gradient plasticity: theory and experiment. Acta Metall. Mater. 1994, 42, 475–487. [Google Scholar] [CrossRef]
- Fleck, N.A.; Hutchinson, J.W. A reformulation of strain gradient plasticity. J. Mech. Phys. Solids 2001, 49, 2245–2271. [Google Scholar] [CrossRef] [Green Version]
- Gudmundson, P. A unified treatment of strain gradient plasticity. J. Mech. Phys. Solids 2004, 52, 1379–1406. [Google Scholar] [CrossRef]
- Niordson, C.F.; Hutchinson, J.W. On lower order strain gradient plasticity theories. Eur. J. Mech. A Solids 2003, 22, 771–778. [Google Scholar] [CrossRef]
- Martínez-Pañeda, E.; Niordson, C.F.; Bardella, L. A finite element framework for distortion gradient plasticity with applications to bending of thin foils. Int. J. Solids Struct. 2016, 96, 288–299. [Google Scholar] [CrossRef] [Green Version]
- Aifantis, E. On the Microstructural Origin of Certain Inelastic Models. J. Eng. Mater. Technol. 1984, 106, 326–330. [Google Scholar] [CrossRef]
- Gao, H.; Huang, Y. Taylor-based nonlocal theory of plasticity. Int. J. Solids Struct. 2001, 38, 2615–2637. [Google Scholar] [CrossRef]
- Bergström, Y. Dislocation model for the stress-strain behaviour of polycrystalline α-Fe with special emphasis on the variation of the densities of mobile and immobile dislocations. Mater. Sci. Eng. 1969, 5, 193–200. [Google Scholar] [CrossRef]
- Evers, L.; Brekelmans, W.; Geers, M. Non-local crystal plasticity model with intrinsic SSD and GND effects. J. Mech. Phys. Solids 2004, 52, 2379–2401. [Google Scholar] [CrossRef]
- Yalcinkaya, T.; Brekelmans, W.; Geers, M. Deformation patterning driven by rate dependent non-convex strain gradient plasticity. J. Mech. Phys. Solids 2011, 59, 1–17. [Google Scholar] [CrossRef]
- Bargmann, S.; Ekh, M. Microscopic temperature field prediction during adiabatic loading using gradient extended crystal plasticity. Int. J. Solids Struct. 2013, 50, 899–906. [Google Scholar] [CrossRef]
- Svendsen, B.; Bargmann, S. On the continuum thermodynamic rate variational formulation of models for extended crystal plasticity at large deformation. J. Mech. Phys. Solids 2010, 58, 1253–1271. [Google Scholar] [CrossRef]
- Gurtin, M.E.; Anand, L. A gradient theory for single-crystal plasticity. Modell. Simul. Mater. Sci. Eng. 2007, 15, S263. [Google Scholar] [CrossRef]
- Kuroda, M.; Tvergaard, V. Studies of scale dependent crystal viscoplasticity models. J. Mech. Phys. Solids 2006, 54, 1789–1810. [Google Scholar] [CrossRef]
- Bardella, L. A deformation theory of strain gradient crystal plasticity that accounts for geometrically necessary dislocations. J. Mech. Phys. Solids 2006, 54, 128–160. [Google Scholar] [CrossRef]
- Peng, X.-L.; Huang, G.-Y. Modeling dislocation absorption by surfaces within the framework of strain gradient crystal plasticity. Int. J. Solids Struct. 2015, 72, 98–107. [Google Scholar] [CrossRef]
- Ohno, N.; Okumura, D. Higher-order stress and grain size effects due to self-energy of geometrically necessary dislocations. J. Mech. Phys. Solids 2007, 55, 1879–1898. [Google Scholar] [CrossRef]
- Voyiadjis, G.Z.; Deliktas, B. Mechanics of strain gradient plasticity with particular reference to decomposition of the state variables into energetic and dissipative components. Int. J. Eng. Sci. 2009, 47, 1405–1423. [Google Scholar] [CrossRef]
- Becker, M. Incompatibility and Instability Based Size Effects in Crystals and Composites at Finite Elastoplastic Strains. Ph.D. Thesis, Institut für Mechanik (Bauwesen), Lehrstuhl I, Stuttgart, Germany, 21 February 2006. [Google Scholar]
- Reddy, B.D. The role of dissipation and defect energy in variational formulations of problems in strain-gradient plasticity. Part 1: polycrystalline plasticity. Cont. Mech. Thermodyn. 2011, 23, 527–549. [Google Scholar] [CrossRef]
- Nellemann, C.; Niordson, C.; Nielsen, K. Hardening and strengthening behavior in rate-independent strain gradient crystal plasticity. Eur. J. Mech. A Solids 2018, 67, 157–168. [Google Scholar] [CrossRef]
- Fleck, N.; Hutchinson, J.; Willis, J. Strain gradient plasticity under non-proportional loading. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 2014, 470, 20140627. [Google Scholar] [CrossRef]
- Nielsen, K.; Niordson, C. A numerical basis for strain-gradient plasticity theory: Rate-independent and rate-dependent formulations. J. Mech. Phys. Solids 2014, 63, 113–127. [Google Scholar] [CrossRef]
- Miehe, C.; Schröder, J. A comparative study of stress update algorithms for rate-independent and rate-dependent crystal plasticity. Int. J. Numer. Methods Eng. 2001, 50, 273–298. [Google Scholar] [CrossRef]
- Van Liempt, P. Workhardening and Substructural Geomtery of Metals. J. Mater. Process. Technol. 1994, 45, 459–464. [Google Scholar] [CrossRef]
- Stein, E.; de Borst, R.; Hughes, T. Encyclopedia of Computational Mechanics; John Wiley: Hoboken, NJ, USA, 2004; ISBN 9780470846995. [Google Scholar]
- Kroener, E. Allgemeine Kontinuumstheorie der Versetzungen und Eigenspannungen. Arch. Ration. Mech. Anal. 1960, 4, 273–334. [Google Scholar] [CrossRef]
- Gurtin, M.; Fried, E.; Anand, L. The Mechanics and Thermodynamics of Continua; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Arsenlis, A.; Parks, D.M. Modeling the evolution of crystallographic dislocation density in crystal plasticity. J. Mech. Phys. Solids 2002, 50, 1979–2009. [Google Scholar] [CrossRef]
- Gurtin, M.E. A finite-deformation, gradient theory of single-crystal plasticity with free energy dependent on densities of geometrically necessary dislocations. Int. J. Plast. 2008, 24, 702–725. [Google Scholar] [CrossRef]
- Lee, K.C.; Stumpf, H. A model of elastoplastic bodies with continuously distributed dislocations. Int. J. Plast. 1996, 12, 611–627. [Google Scholar] [CrossRef]
- Fleck, N.; Hutchinson, J. Strain gradient plasticity. Adv. Appl. Mech. 1997, 33, 295–361. [Google Scholar]
- Simo, J.; Hughes, T. Computational Inelasticity. In Interdisciplinary Applied Mathematics; Springer: New York, NY, USA, 2000; ISBN 9780387975207. [Google Scholar]
- Anand, L.; Kothari, M. A computational procedure for rate-independent crystal plasticity. J. Mech. Phys. Solids 1996, 44, 525–558. [Google Scholar] [CrossRef]
- Liszka, T.; Orkisz, J. Special Issue-Computational Methods in Nonlinear Mechanics the finite difference method at arbitrary irregular grids and its application in applied mechanics. Comput. Struct. 1980, 11, 83–95. [Google Scholar] [CrossRef]
- Perdahcioglu, E.S.; Soyarslan, C.; van den Boogaard, A.H.; Bargmann, S. Gradient enhanced physically based plasticity: Implementation and application to a problem pertaining size effect. AIP Conf. Proc. 2016, 1769, 160011. [Google Scholar] [Green Version]
- Soyarslan, C.; Perdahcioglu, E.S.; Asik, E.E.; van den Boogaard, A.H.; Bargmann, S. Implementation and application of a gradient enhanced crystal plasticity model. AIP Conf. Proc. 2017, 1896, 160008. [Google Scholar]
- Martínez-Pañeda, E.; Betegón, C. Modeling damage and fracture within strain-gradient plasticity. Int. J. Solids Struct. 2015, 59, 208–215. [Google Scholar] [CrossRef]
- Peng, X.-L.; Husser, E.; Huang, G.-Y.; Bargmann, S. Modeling of surface effects in crystalline materials within the framework of gradient crystal plasticity. J. Mech. Phys. Solids 2018, 112, 508–522. [Google Scholar] [CrossRef]
- Husser, E.; Soyarslan, C.; Bargmann, S. Size affected dislocation activity in crystals: Advanced surface and grain boundary conditions. Extreme Mech. Lett. 2017, 13, 36–41. [Google Scholar] [CrossRef]
- Gurtin, M.E. A theory of grain boundaries that accounts automatically for grain misorientation and grain-boundary orientation. J. Mech. Phys. Solids 2008, 56, 640–662. [Google Scholar] [CrossRef]
- Hansen, N. The effect of grain size and strain on the tensile flow stress of Aluminium at room temperature. Acta Metall. 1976, 25, 863–869. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Continuum Plasticity | Crystal Plasticity | |||||
|---|---|---|---|---|---|---|
| E | [MPa] | 75,000 | E | [MPa] | 75,000 | |
| [-] | [-] | |||||
| b | [mm] | b | [mm] | |||
| c | [-] | c | [-] | |||
| [mm] | [mm] | |||||
| U | [mm] | [mm] | ||||
| [-] | 50 | [-] | ||||
| [MPa] | 45 | [MPa] | 10 | |||
| [-] | ||||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Perdahcıoğlu, E.S.; Soyarslan, C.; Aşık, E.E.; Van den Boogaard, T.; Bargmann, S. A Class of Rate-Independent Lower-Order Gradient Plasticity Theories: Implementation and Application to Disc Torsion Problem. Materials 2018, 11, 1425. https://doi.org/10.3390/ma11081425
Perdahcıoğlu ES, Soyarslan C, Aşık EE, Van den Boogaard T, Bargmann S. A Class of Rate-Independent Lower-Order Gradient Plasticity Theories: Implementation and Application to Disc Torsion Problem. Materials. 2018; 11(8):1425. https://doi.org/10.3390/ma11081425
Chicago/Turabian StylePerdahcıoğlu, Emin Semih, Celal Soyarslan, Emin Erkan Aşık, Ton Van den Boogaard, and Swantje Bargmann. 2018. "A Class of Rate-Independent Lower-Order Gradient Plasticity Theories: Implementation and Application to Disc Torsion Problem" Materials 11, no. 8: 1425. https://doi.org/10.3390/ma11081425
APA StylePerdahcıoğlu, E. S., Soyarslan, C., Aşık, E. E., Van den Boogaard, T., & Bargmann, S. (2018). A Class of Rate-Independent Lower-Order Gradient Plasticity Theories: Implementation and Application to Disc Torsion Problem. Materials, 11(8), 1425. https://doi.org/10.3390/ma11081425