Underlying Physics of Conductive Polymer Composites and Force Sensing Resistors (FSRs). A Study on Creep Response and Dynamic Loading

 , ,
, ,
Abstract
1. Introduction
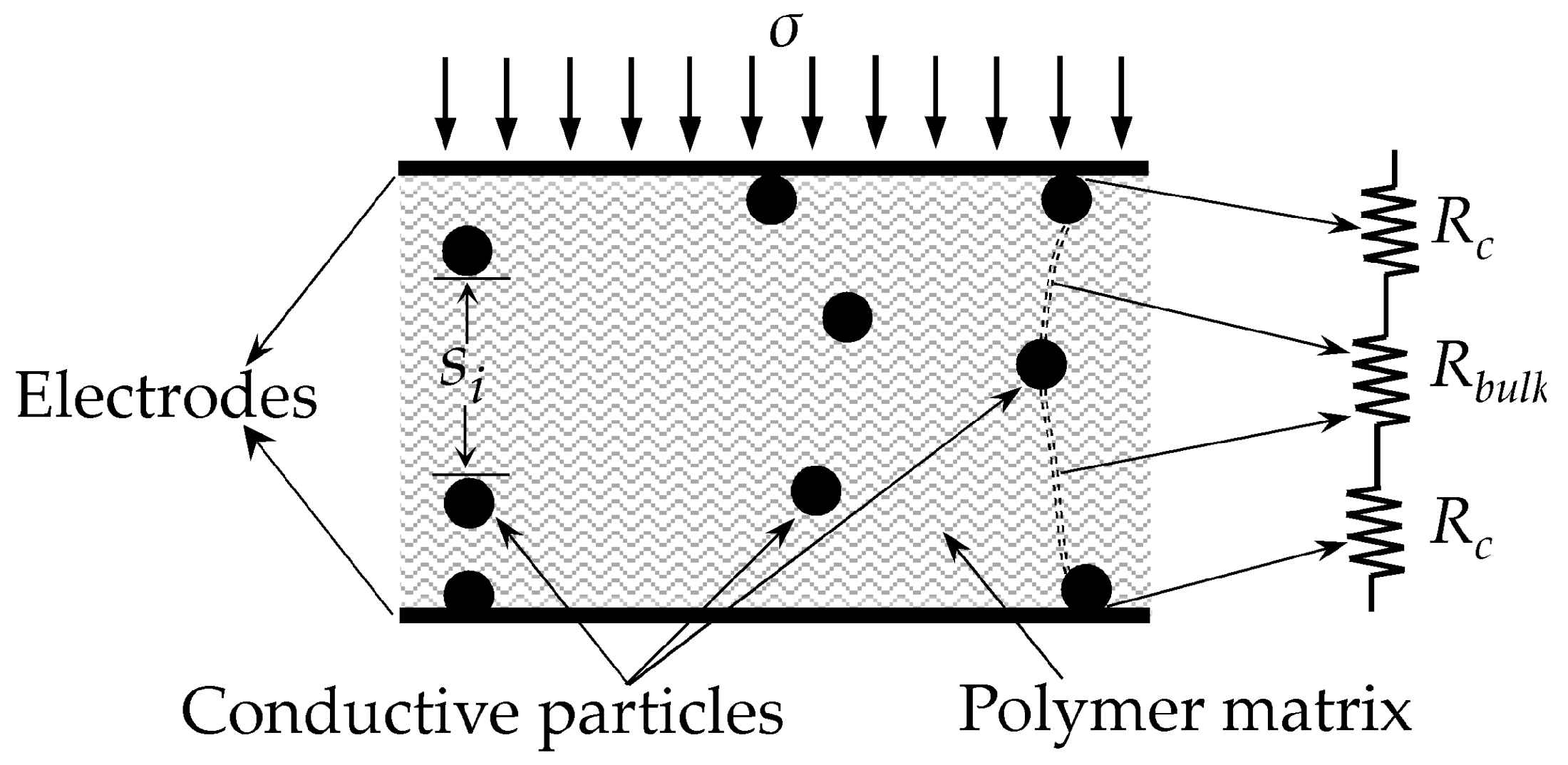
2. A Review on the Authors’ Proposed Model for the Quantum Tunneling Conduction of Force Sensing Resistors (FSRs)
2.1. Resistance of the CPC (Rbulk)
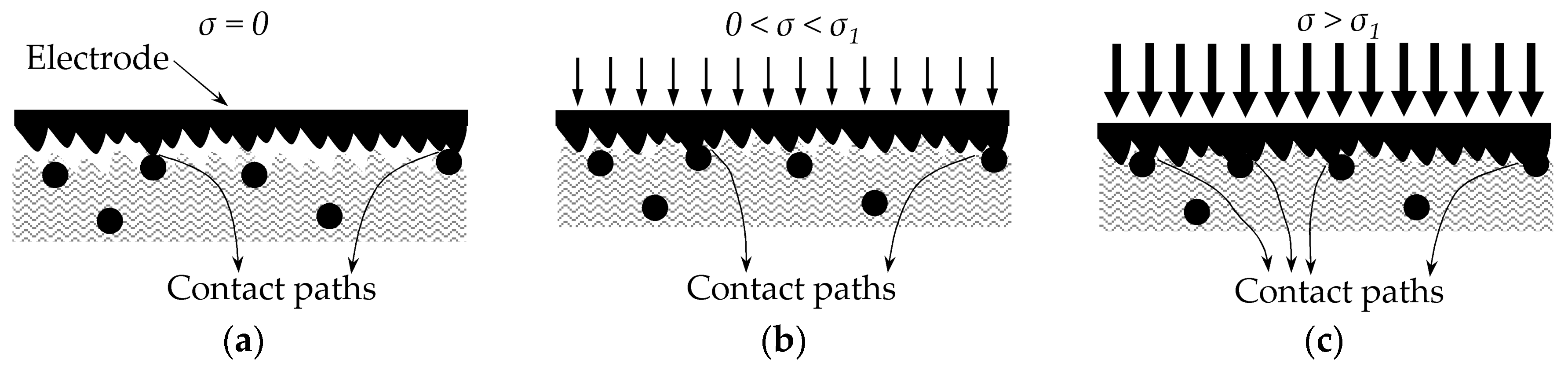
2.2. Contact Resistance (Rc)
2.3. Effective Area for Tunneling Conduction (A) and Stress−Strain (σ−ε) Relationship
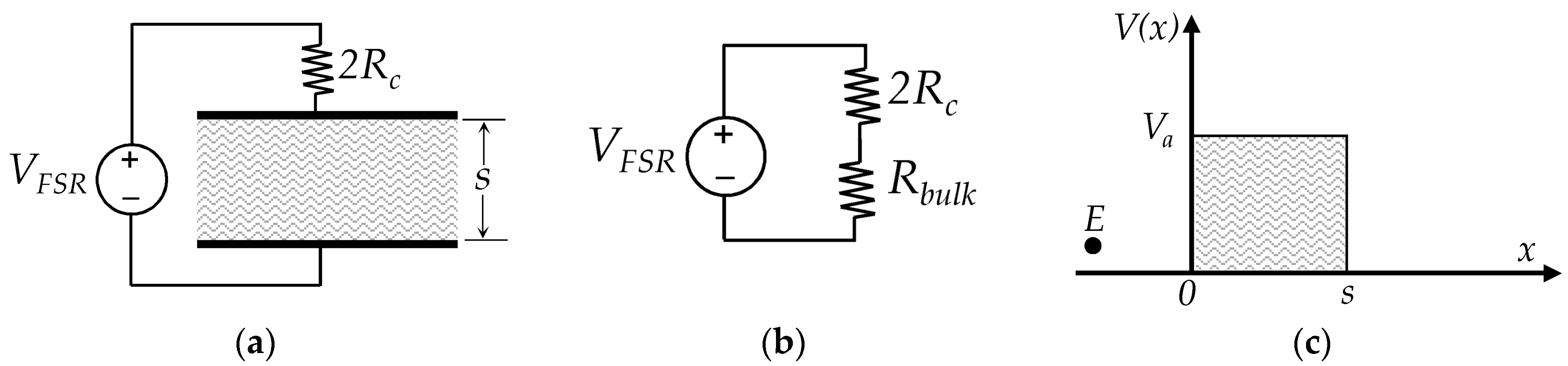
2.4. Authors Proposed Model for the Quantum Tunneling Conduction of Force Sensing Resistors (FSRs) under Conditions of Static Loading
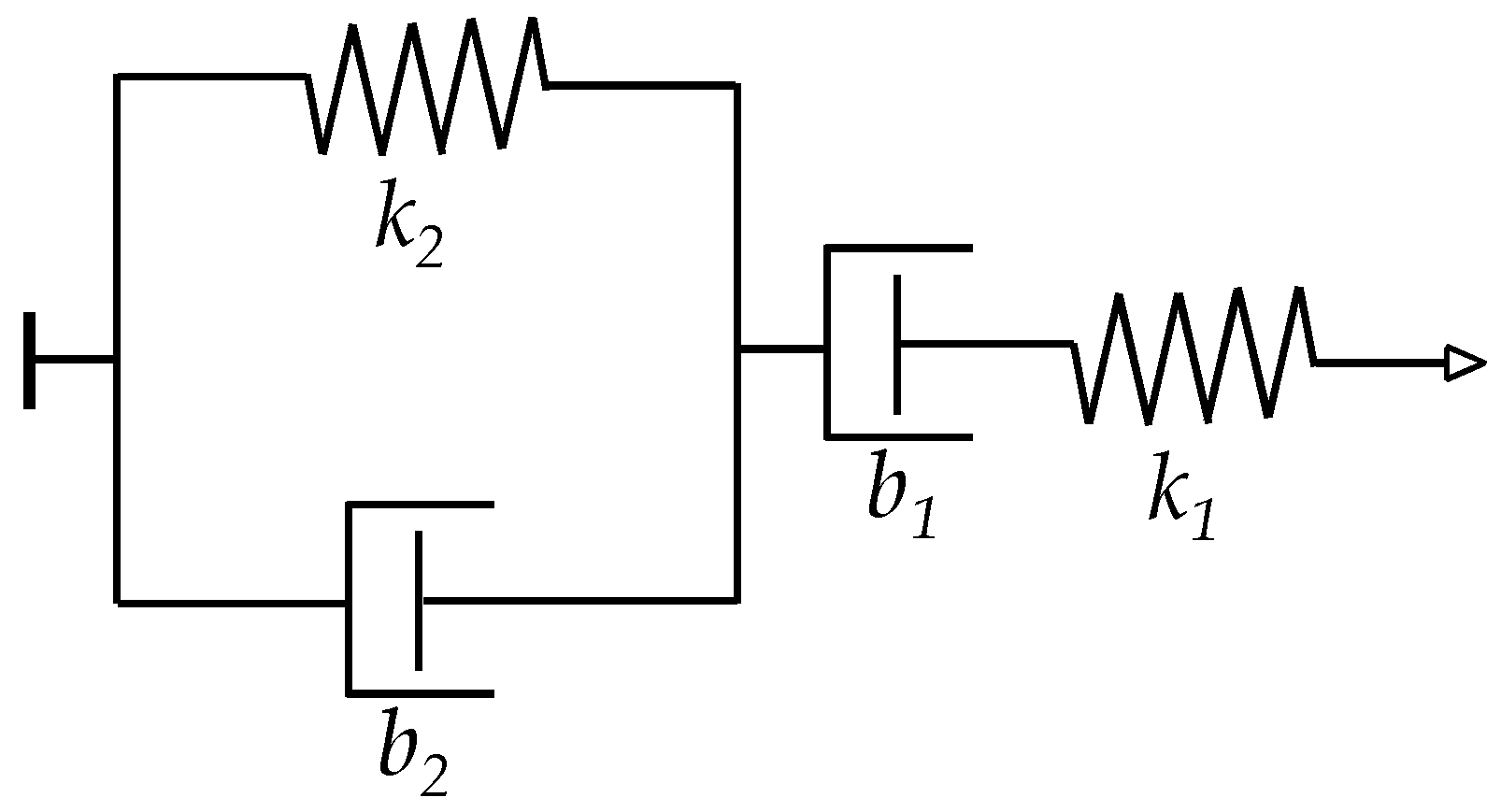
2.5. A Review on Previous Models for the Creep Behavior of Conductive Polymer Composites (CPCs)
3. Modeling and Simulation of the Creep Response of FSRs
3.1. Derivation of a Model for the Creep Behavior in the Inter-Particle Separation of FSRs
3.2. Influence of the Sourcing Voltage, VFSR, in the Creep Behavior of FSRs: Simulation and Analysis
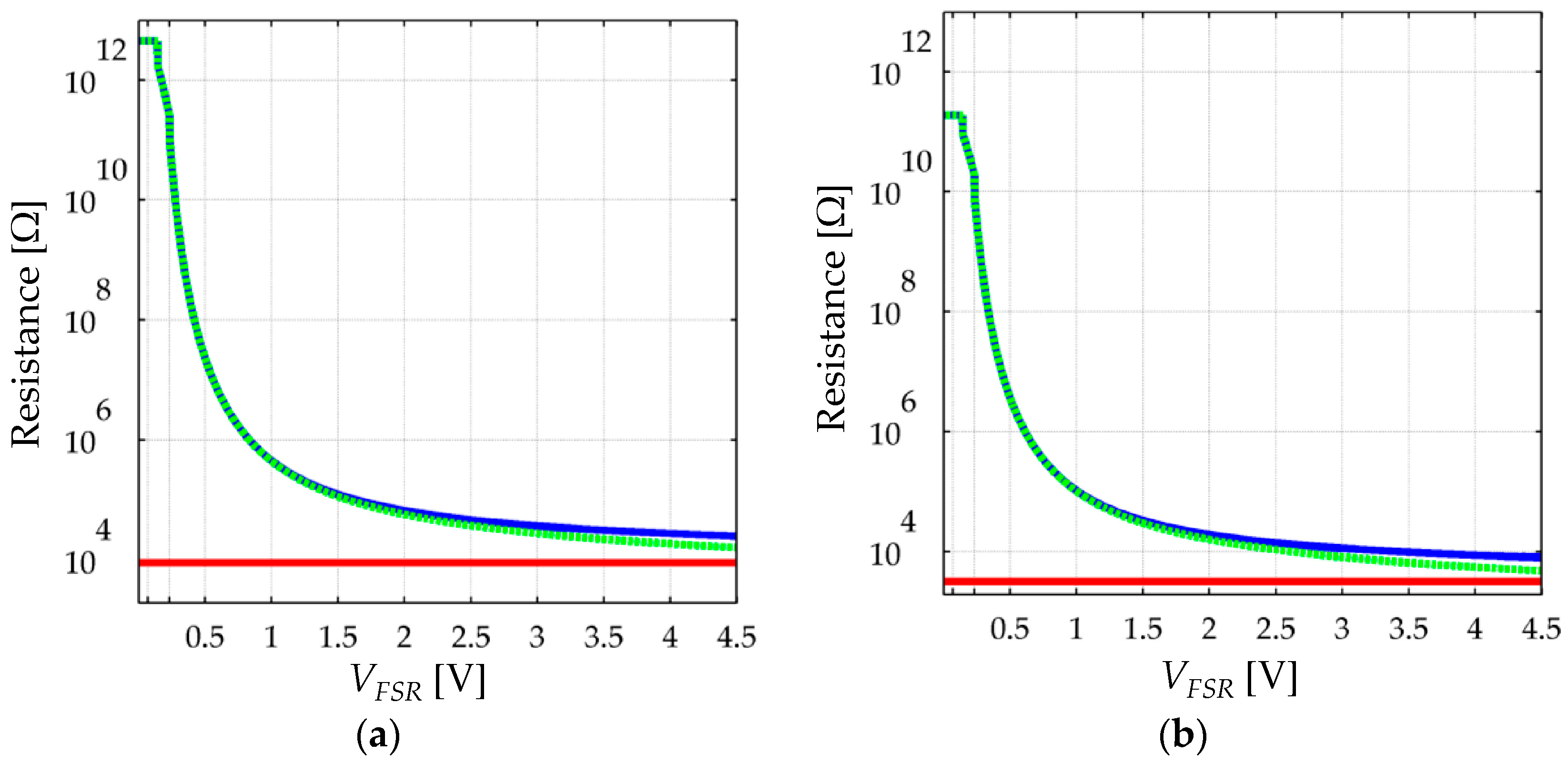
3.2.1. Creep of Current for Incremental Values of the Input Voltage, VFSR
3.2.2. Creep of Current for Incremental Applied Stresses
4. Experimental Results and Discussion
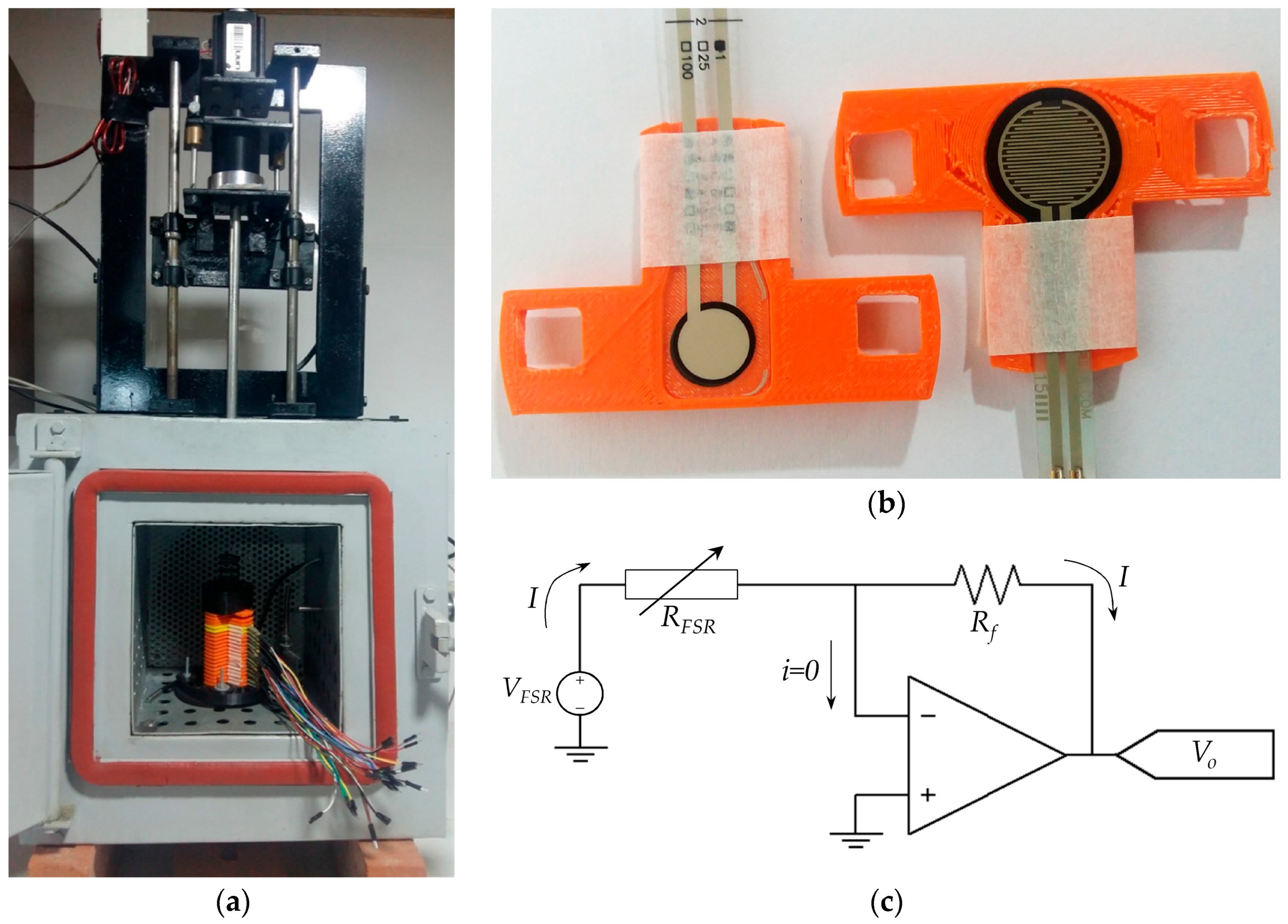
4.1. Test Bench for Gathering Sensor Data
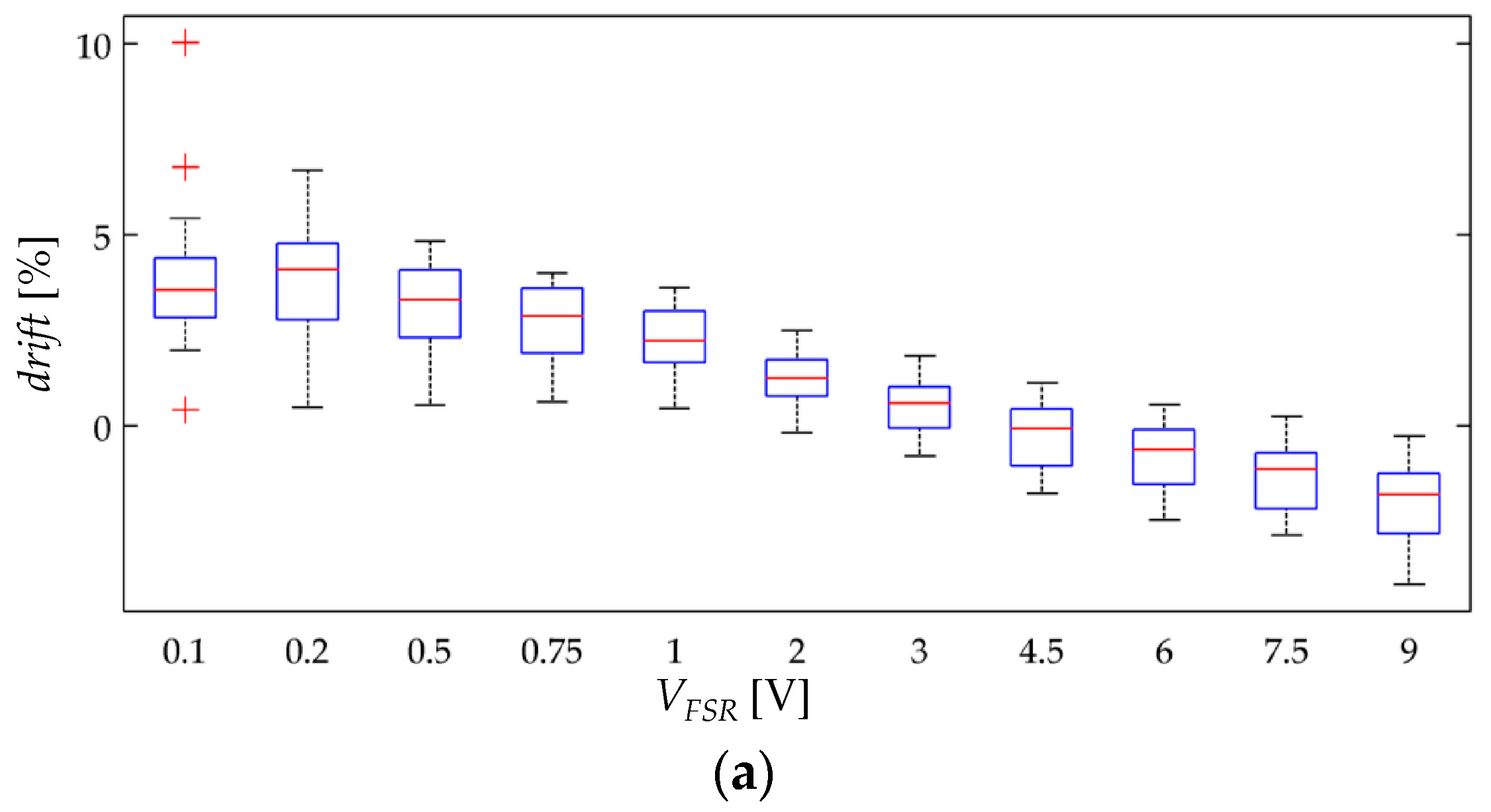
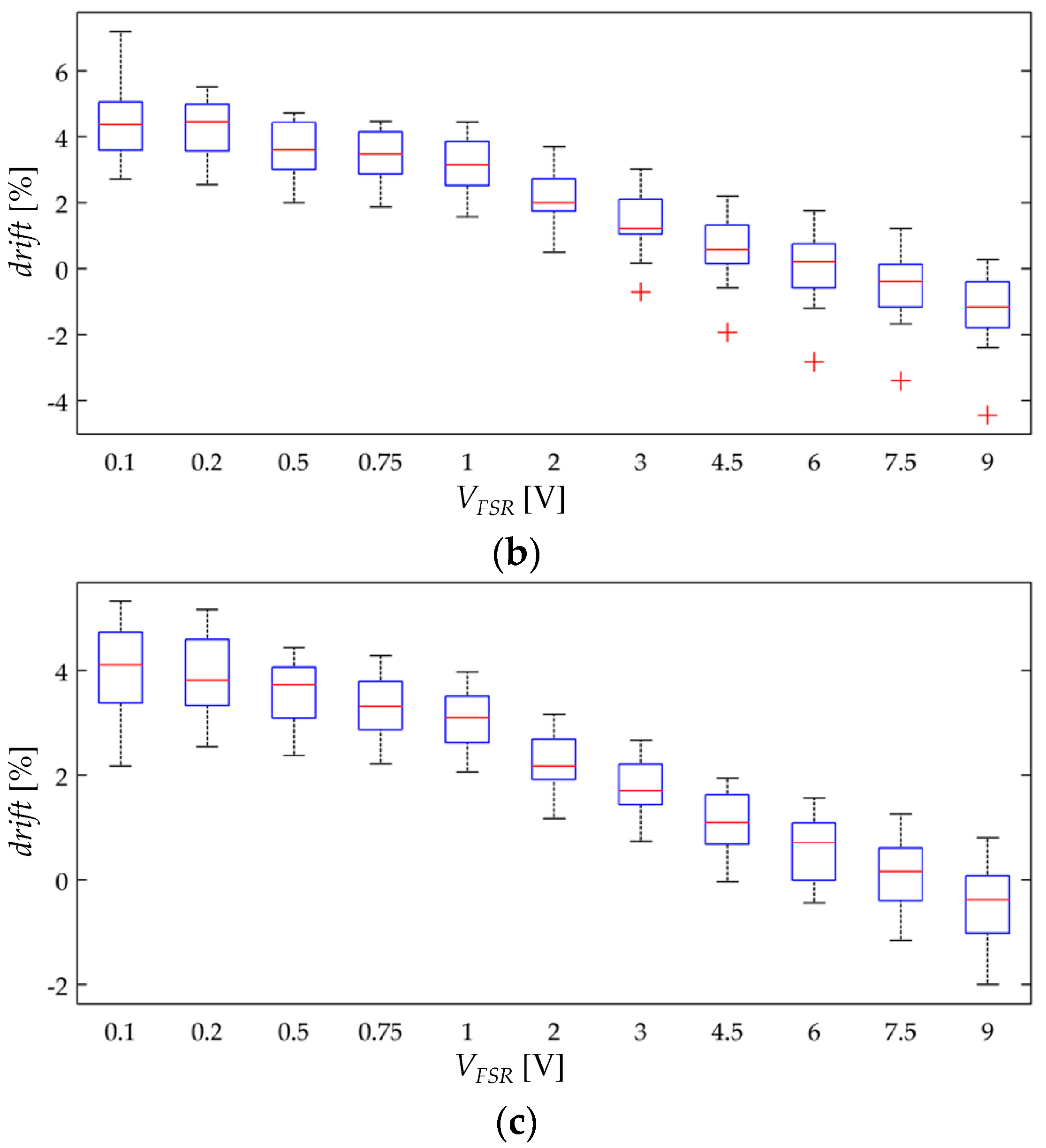
4.2. Creep Response of FSRs at Different Voltages
4.3. Creep Response of FSRs at Different Stresses
4.4. Sensitivity Degradation. A Phenomenological Approach towards Its Understanding
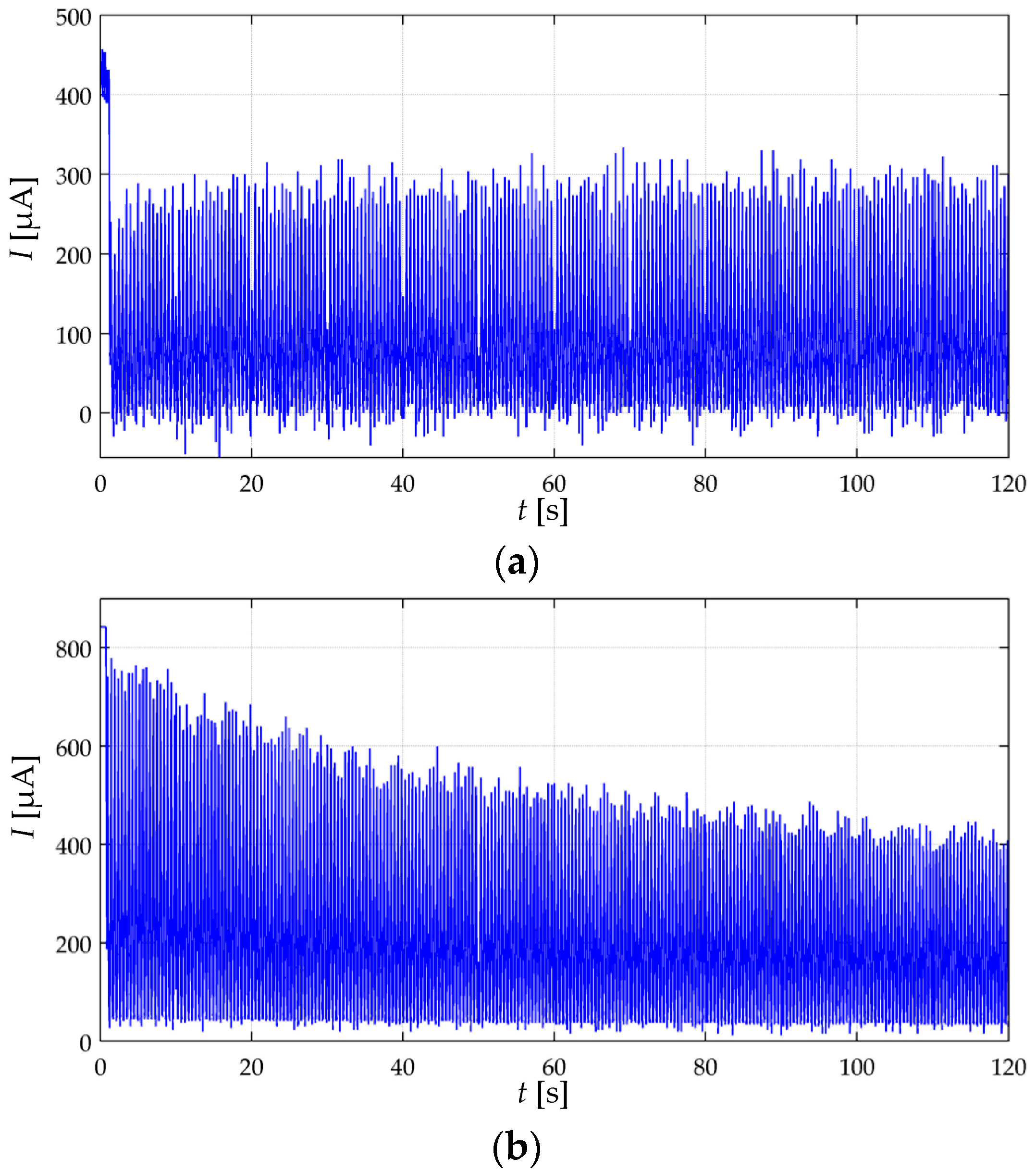
4.5. Importance of the Driving Circuit towards Obtaining Repeatable Measurements
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wang, L.; Ding, T.; Wang, P. Influence of carbon black concentration on piezoresistivity for carbon-black-filled silicone rubber composite. Carbon 2009, 47, 3151–3157. [Google Scholar] [CrossRef]
- Mei, H.; Zhang, C.; Wang, R.; Feng, J.; Zhang, T. Impedance characteristics of surface pressure-sensitive carbon black/silicone rubber composites. Sens. Actuators A Phys. 2015, 233, 118–124. [Google Scholar] [CrossRef]
- Canavese, G.; Lombardi, M.; Stassi, S.; Pirri, C. Comprehensive Characterization of Large Piezoresistive Variation of Ni-PDMS Composites. In Mechanical and Aerospace Engineering, ICMAE2011. Appl. Mech. Mater. Trans. Tech. Publ. 2012, 110, 1336–1344. [Google Scholar] [CrossRef]
- Stassi, S.; Cauda, V.; Canavese, G.; Pirri, C. Flexible Tactile Sensing Based on Piezoresistive Composites: A Review. Sensors 2014, 14, 5296–5332. [Google Scholar] [CrossRef] [PubMed]
- Bloor, D.; Donnelly, K.; Hands, P.; Laughlin, P.; Lussey, D. A metal-polymer composite with unusual properties. J. Phys. D Appl. Phys. 2005, 38, 2851. [Google Scholar] [CrossRef]
- Stassi, S.; Canavese, G.; Cosiansi, F.; Gazia, R.; Fallauto, C.; Corbellini, S.; Pirola, M.; Cocuzza, M. Smart piezoresistive tunnelling composite for flexible robotic sensing skin. Smart Mater. Struct. 2013, 22, 125039. [Google Scholar] [CrossRef]
- Wang, L.; Han, Y. Application of carbon nanotube filled silicone rubber composite in stress measurement during ramped loading with low compression speed. Sens. Actuators A Phys. 2013, 201, 214–221. [Google Scholar] [CrossRef]
- Wang, L.; Li, J. A piezoresistive flounder element based on conductive polymer composite. Sens. Actuators A Phys. 2014, 216, 214–222. [Google Scholar] [CrossRef]
- Yousef, H.; Boukallel, M.; Althoefer, K. Tactile sensing for dexterous in-hand manipulation in robotics. A review. Sens. Actuators A Phys. 2011, 167, 171–187. [Google Scholar] [CrossRef]
- Canavese, G.; Stassi, S.; Fallauto, C.; Corbellini, S.; Cauda, V.; Camarchia, V.; Pirola, M.; Pirri, C.F. Piezoresistive flexible composite for robotic tactile applications. Sens. Actuators A Phys. 2014, 208, 1–9. [Google Scholar] [CrossRef]
- Silva, P.; Pinto, P.; Postolache, O.; Dias, J. Tactile Sensors for Robotic Applications. Measurement 2013, 46, 1257–1271. [Google Scholar] [CrossRef]
- Faraz, M.; Salcic, Z.; Wang, K. Analysis and selection of the Force Sensitive Resistors for gait characterization. In Proceedings of the 6th International Conference on Automation, Robotics and Applications (ICARA 2015), Queenstown, New Zealand, 17–19 February 2015; pp. 370–375. [Google Scholar]
- Verdejo, R.; Mills, N. Heel-shoe interactions and the durability of EVA foam running-shoe midsoles. J. Biomech. 2004, 37, 1379–1386. [Google Scholar] [CrossRef] [PubMed]
- Lebosse, C.; Renaud, P.; Bayle, B.; de Mathelin, M. Modeling and Evaluation of Low-Cost Force Sensors. IEEE Trans. Robot. 2011, 27, 815–822. [Google Scholar] [CrossRef]
- Tiwana, M.; Redmond, S.; Lovell, N. A review of tactile sensing technologies with applications in biomedical engineering. Sens. Actuators A Phys. 2012, 179, 17–31. [Google Scholar] [CrossRef]
- Dempsey, S.; Szablewski, M.; Atkinson, D. Tactile sensing in human-computer interfaces: The inclusion of pressure sensitivity as a third dimension of user input. Sens. Actuators A Phys. 2015, 232, 229–250. [Google Scholar] [CrossRef]
- Bernstein, J.; Cieplinski, A.; Degner, B.; Kerr, D.; Kessler, P.; Puskarich, P.; Coelho, M.H.; Pance, A. Touch Pad with Force Sensors and Actuator Feedback. US Patent 8,633,916, 21 January 2014. [Google Scholar]
- Ding, S.; Han, B.; Dong, X.; Yu, X.; Ni, Y.; Zheng, Q.; Ou, J.P. Pressure-sensitive behaviors, mechanisms and model of field assisted quantum tunneling composites. Polymer 2017, 113, 105–118. [Google Scholar] [CrossRef]
- Dahiya, R.; Metta, G.; Valle, M.; Sandini, G. Tactile Sensing From Humans to Humanoids. IEEE Trans. Robot. 2010, 26, 1–20. [Google Scholar] [CrossRef]
- Castellanos-Ramos, J.; Navas-Gonzalez, R.; Macicior, H.; Sikora, T.; Ochoteco, E.; Vidal-Verdu, F. Tactile sensors based on Conductive Polymers. Microsyst. Technol. 2010, 16, 765–776. [Google Scholar] [CrossRef]
- Zhang, X.; Pan, Y.; Zheng, Q.; Yi, X. Time dependence of piezoresistance for the conductor-filled polymer composites. J. Polym. Sci. Part B Polym. Phys. 2000, 38, 2739–2749. [Google Scholar] [CrossRef]
- Kalantari, M.; Dargahi, J.; Kovecses, J.; Mardasi, M.; Nouri, S. A New Approach for Modeling Piezoresistive Force Sensors Based on Semiconductive Polymer Composites. IEEE/ASME Trans. Mechatron. 2012, 17, 572–581. [Google Scholar] [CrossRef]
- Tekscan Inc. FlexiForce, Standard Force & Load Sensors Model A201. Datasheet. Available online: https://www.tekscan.com/sites/default/files/resources/FLX-A201-A.pdf (accessed on 16 June 2017).
- Interlink Electronics. FSR400 Series Datasheet. Available online: http://www.interlinkelectronics.com/datasheets/Datasheet_FSR.pdf (accessed on 16 June 2017).
- Peratech Inc. QTC SP200 Series Datasheet. Single Point Sensors. Available online: https://www.peratech.com/assets/uploads/datasheets/Peratech-QTC-DataSheet-SP200-Series-Nov15.pdf (accessed on 16 June 2017).
- Knite, M.; Teteris, V.; Kiploka, A.; Kaupuzs, J. Polyisoprene-carbon black nanocomposites as tensile strain and pressure sensor materials. Sens. Actuators A Phys. 2004, 110, 142–149. [Google Scholar] [CrossRef]
- Cattin, C.; Hubert, P. Piezoresistance in Polymer Nanocomposites with High Aspect Ratio Particles. ACS Appl. Mater. Interfaces 2014, 6, 1804–1811. [Google Scholar] [CrossRef] [PubMed]
- Roldughin, V.; Vysotskii, V. Percolation properties of metal-filled polymer films, structure and mechanisms of conductivity. Prog. Org. Coat. 2000, 39, 81–100. [Google Scholar] [CrossRef]
- Simmons, J. Electrical tunnel effect between dissimilar electrodes separated by a thin insulating Film. J. Appl. Phys. 1963, 34, 2581–2590. [Google Scholar] [CrossRef]
- Paredes-Madrid, L.; Palacio, C.; Matute, A.; Parra Vargas, C. Underlying Physics of Conductive Polymer Composites and Force Sensing Resistors (FSRs) under Static Loading Conditions. Sensors 2017, 17. [Google Scholar] [CrossRef] [PubMed]
- Lin, L.; Liu, S.; Zhang, Q.; Li, X.; Ji, M.; Deng, H.; Fu, Q. Towards Tunable Sensitivity of Electrical Property to Strain for Conductive Polymer Composites Based on Thermoplastic Elastomer. ACS Appl. Mater. Interfaces 2013, 5, 5815–5824. [Google Scholar] [CrossRef] [PubMed]
- Dabling, J.; Filatov, A.; Wheeler, J. Static and cyclic performance evaluation of sensors for human interface pressure measurement. Conf. Proc. IEEE Eng. Med. Biol. Soc. 2012, 2012, 162–165. [Google Scholar] [PubMed]
- Van den Heever, D.; Schreve, K.; Scheffer, C. Tactile Sensing Using Force Sensing Resistors and a Super-Resolution Algorithm. IEEE Sens. J. 2009, 9, 29–35. [Google Scholar] [CrossRef]
- Otto, J.; Brown, T.; Callaghan, J. Static and Dynamic Response of a multiplexed-array Piezoresistive Contact Sensor. Exp. Mech. 1999, 39, 317–323. [Google Scholar] [CrossRef]
- Van Wees, B.; Van Houten, H.; Beenakker, C.; Williamson, J.; Kouwenhoven, L.; Van der Marel, D.; Foxon, C.T. Quantized conductance of point contacts in a two-dimensional electron gas. Phys. Rev. Lett. 1988, 60, 848–850. [Google Scholar] [CrossRef] [PubMed]
- Wharam, D.; Thornton, T.; Newbury, R.; Pepper, M.; Ahmed, H.; Frost, J.; Hasko, D.G.; Peacock, D.C.; Ritchie, D.A.; Jones, G.A.C. One-dimensional transport and the quantisation of the ballistic resistance. J. Phys. C Solid State Phys. 1988, 21, 209–214. [Google Scholar] [CrossRef]
- Ruschau, G.; Yoshikawa, S.; Newnham, R. Resistivities of conductive composites. J. Appl. Phys. 1992, 72, 953–959. [Google Scholar] [CrossRef]
- Mikrajuddin, A.; Shi, F.; Kim, H.; Okuyama, K. Size-dependent electrical constriction resistance for contacts of arbitrary size: From Sharvin to Holm limits. Mater. Sci. Semicond. Proc. 1999, 2, 321–327. [Google Scholar] [CrossRef]
- Shi, F.; Abdullah, M.; Chungpaiboonpatana, S.; Okuyama, K.; Davidson, C.; Adams, J. Electrical conduction of anisotropic conductive adhesives: Effect of size distribution of conducting filler particles. Mater. Sci. Semicond. Proc. 1999, 2, 263–269. [Google Scholar] [CrossRef]
- Wang, L.; Ma, F.; Shi, Q.; Liu, H.; Wang, X. Study on compressive resistance creep and recovery of flexible pressure sensitive material based on carbon black filled silicone rubber composite. Sens. Actuators A Phys. 2011, 165, 207–215. [Google Scholar] [CrossRef]
- Zheng, Q.; Zhou, J.; Song, Y. Time-dependent uniaxial piezoresistive behavior of high-density polyethylene/short carbon fiber conductive composites. J. Mater. Res. 2004, 19, 2625–2634. [Google Scholar] [CrossRef]
- De la Vega, A.; Sumfleth, J.; Wittich, H.; Schulte, K. Time and temperature dependent piezoresistance of carbon nanofiller/polymer composites under dynamic load. J. Mater. Sci. 2012, 47, 2648–2657. [Google Scholar] [CrossRef]
- Vidhate, S.; Chung, J.; Vaidyanathan, V.; D’Souza, N. Resistive-conductive transitions in the time-dependent piezoresponse of PVDF-MWCNT nanocomposites. Polym. J. 2010, 42, 567–574. [Google Scholar] [CrossRef]
- Mainardi, F.; Spada, G. Creep, relaxation and viscosity properties for basic fractional models in rheology. Eur. Phys. J. Spec. Top. 2011, 193, 133–160. [Google Scholar] [CrossRef]
- Komi, E.; Roberts, J.; Rothberg, S. Evaluation of thin, flexible sensors for time-resolved grip force measurement. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2007, 221, 1687–1699. [Google Scholar] [CrossRef]
- Lebosse, C.; Bayle, B.; De Mathelin, M.; Renaud, P. Nonlinear modeling of low cost force sensors. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 3437–3442. [Google Scholar]
- Paredes-Madrid, L.; Matute, A.; Peña, A. Framework for a Calibration-Less Operation of Force Sensing Resistors at Different Temperatures. IEEE Sens. J. 2017, 17, 4133–4142. [Google Scholar] [CrossRef]
- Firouzeh, A.; Amon-Junior, A.; Paik, J. Soft piezoresistive sensor model and characterization with varying design parameters. Sens. Actuators A Phys. 2015, 233, 158–168. [Google Scholar] [CrossRef]
- Wang, L. A Method to Improve Sensitivity of Piezoresistive Sensor Based on Conductive Polymer Composite. IEEE/ASME Trans. Mechatron. 2015, 20, 3242–3248. [Google Scholar] [CrossRef]
- Lantada, A.; Lafont, P.; Muñoz, J.; Muñoz-Guijosa, J.; Echavarri, J. Quantum tunnelling composites: Characterisation and modelling to promote their applications as sensors. Sens. Actuators A Phys. 2010, 164, 46–57. [Google Scholar] [CrossRef]
- Hollinger, A.; Wanderley, M. Evaluation of Commercial Force-Sensing Resistors. In Proceedings of the International Conference on New Interfaces for Musical Expression, Paris, France, 4–8 June 2006. [Google Scholar]
- Tekscan Inc. FlexiForce, Sensors User Manual. Available online: http://www.tekscan.com/pdf/FLX-FlexiForce-Sensors-Manual.pdf (accessed on 16 June 2017).
- Krivopal, B. Pressure Sensitive Ink Means, and Method of Use. U.S. Patent 5,989,700, 23 November 1999. [Google Scholar]
- Oreper, B.; Brenneman, J. Pressure Sensor. U.S. Patent 6,272,936, 14 August 2001. [Google Scholar]
- Yaniger, S. Stannous Oxide Force Transducer and Composition. U.S. Patent 5,296,837, 22 March 1994. [Google Scholar]
- Yaniger, S. Conductive Particulate Force Transducer. U.S. Patent 5,302,936, 12 April 1994. [Google Scholar]
- Wang, L.; Han, Y.; Wu, C.; Huang, Y. A solution to reduce the time dependence of the output resistance of a viscoelastic and piezoresistive element. Smart Mater. Struct. 2013, 22, 075021. [Google Scholar] [CrossRef]
- Tekscan Inc. F-Scan In-Shoe Analysis System Datasheet. Available online: https://www.tekscan.com/sites/default/files/resources/MDL-F-Scan-Datasheet.pdf (accessed on 16 June 2017).
- Kati, R.; Forrester, S.; Fleming, P. Evaluation of pressure insoles during running. Procedia Eng. 2010, 2, 3053–3058. [Google Scholar] [CrossRef]
- Woodburn, J.; Helliwell, P. Observations on the F-Scan in-shoe pressure measuring system. Clin. Biomech. 1996, 11, 301–304. [Google Scholar] [CrossRef]
- Liu, X.; Schubert, D. Influence of the pressure-dependent contact area between electrode and composite surface on the electrical conductivity. Compos. Struct. 2016, 136, 414–418. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | FlexiForce A201-1 | Interlink FSR 402 |
|---|---|---|
| A0 (nm2) | 3.87 | 145.8 |
| A1 (nm2/Pa) | 0.703 | 4.7 × 10−6 |
| A2 *1 | 0.44 | 1.88 |
| Va (eV) | 0.229 | 0.231 |
| Vth (V) | 73 × 10−3 | 140 × 10−3 |
| s0 (nm) | 4.41 | 4.38 |
| Rpar (Ω) | 2.27 × 10−14 | 394 |
| α *1 | 0.45 | 1.74 |
| (N·Pak) | 1.19 × 106 | 1.35 × 1010 |
| k1 *2 (MPa) | 4.73 | 0.388 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Paredes-Madrid, L.; Matute, A.; Bareño, J.O.; Parra Vargas, C.A.; Gutierrez Velásquez, E.I. Underlying Physics of Conductive Polymer Composites and Force Sensing Resistors (FSRs). A Study on Creep Response and Dynamic Loading. Materials 2017, 10, 1334. https://doi.org/10.3390/ma10111334
Paredes-Madrid L, Matute A, Bareño JO, Parra Vargas CA, Gutierrez Velásquez EI. Underlying Physics of Conductive Polymer Composites and Force Sensing Resistors (FSRs). A Study on Creep Response and Dynamic Loading. Materials. 2017; 10(11):1334. https://doi.org/10.3390/ma10111334
Chicago/Turabian StyleParedes-Madrid, Leonel, Arnaldo Matute, Jorge O. Bareño, Carlos A. Parra Vargas, and Elkin I. Gutierrez Velásquez. 2017. "Underlying Physics of Conductive Polymer Composites and Force Sensing Resistors (FSRs). A Study on Creep Response and Dynamic Loading" Materials 10, no. 11: 1334. https://doi.org/10.3390/ma10111334
APA StyleParedes-Madrid, L., Matute, A., Bareño, J. O., Parra Vargas, C. A., & Gutierrez Velásquez, E. I. (2017). Underlying Physics of Conductive Polymer Composites and Force Sensing Resistors (FSRs). A Study on Creep Response and Dynamic Loading. Materials, 10(11), 1334. https://doi.org/10.3390/ma10111334