
Energy Link Optimization in a Wireless Power Transfer Grid under Energy Autonomy Based on the Improved Genetic Algorithm



Abstract
:1. Introduction
2. Wireless Power Transfer Grid under Energy Autonomy
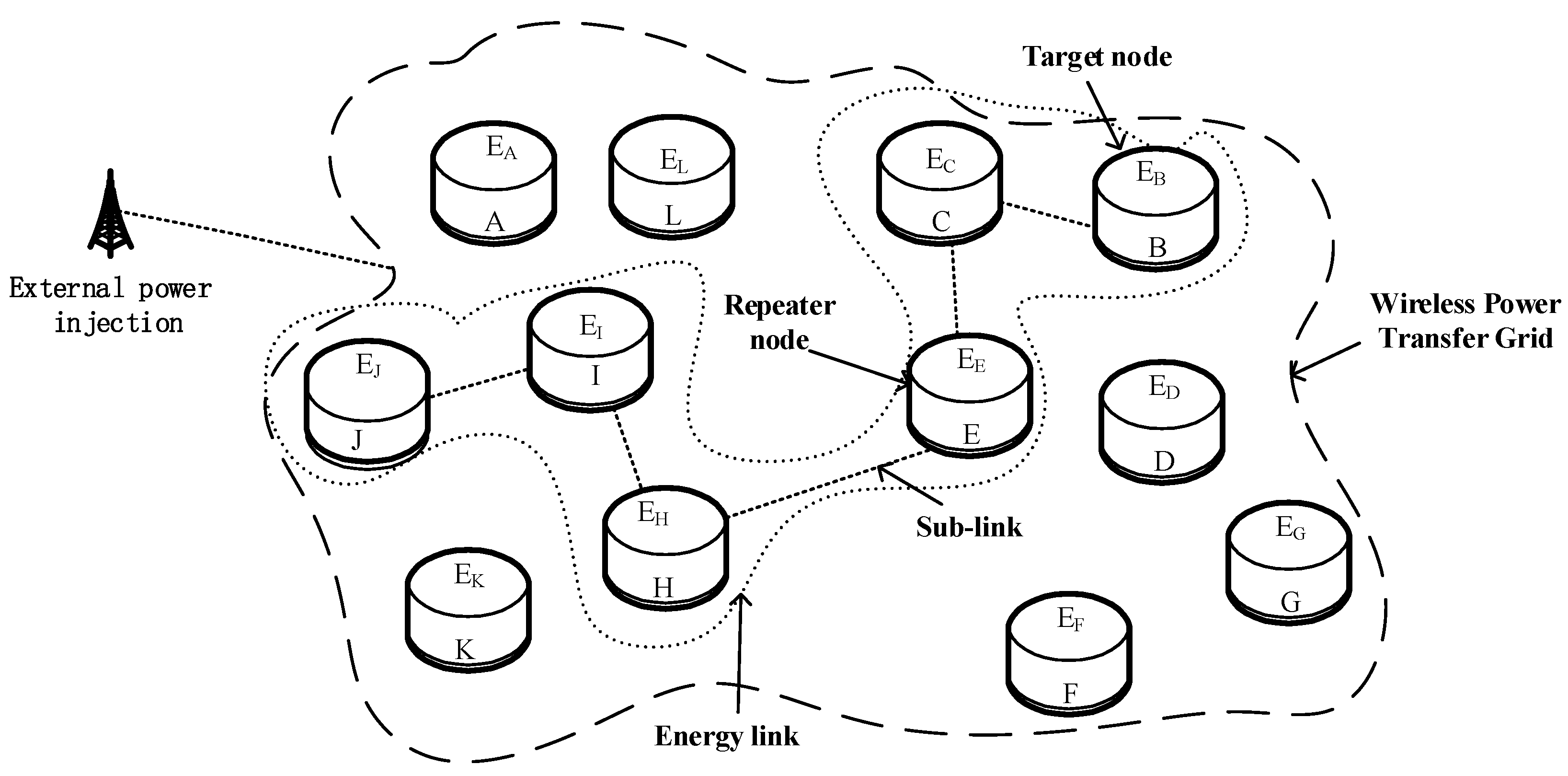
2.1. Grid Introduction
2.2. Node Parameters
- 1
- Each node is assumed to operate with the functional load; therefore, the energy storage in each node is declining with time. Each node will reach three energy situations with the variation of its energy storage:
- –
- Normal situation
- –
- Energy-poor situation
- –
- Energy-disabled situation
Nodes will be removed from WPTG for maintaining its own functional load if they reach the energy-disabled situation. Therefore, the node in the energy-poor situation will call for energy supplies to avoid this worst situation. - 2
- Each node is assumed to be able to detect the surrounding (neighbouring) nodes’ information.
- 3
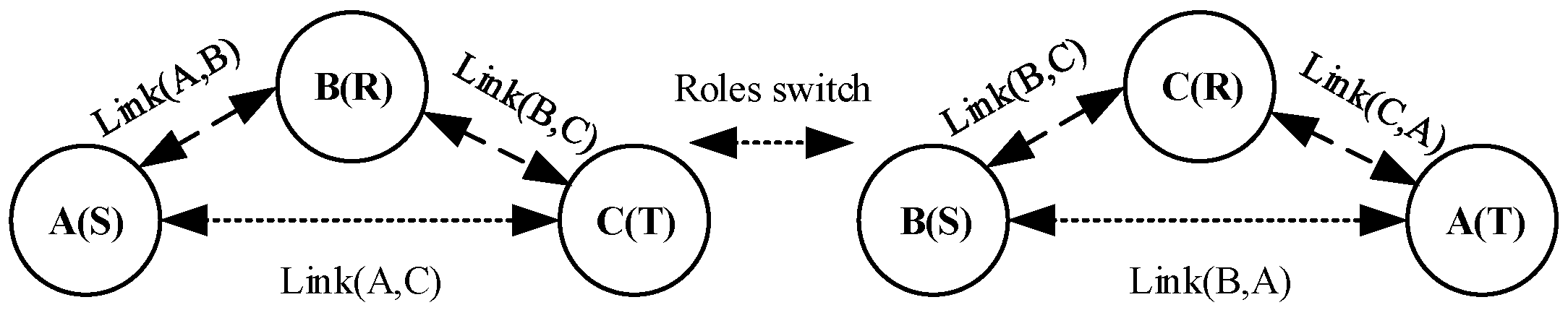
- Relevant nodes in the energy link act as:
- –
- Power supply node S
- –
- Repeater node R
- –
- Load node T
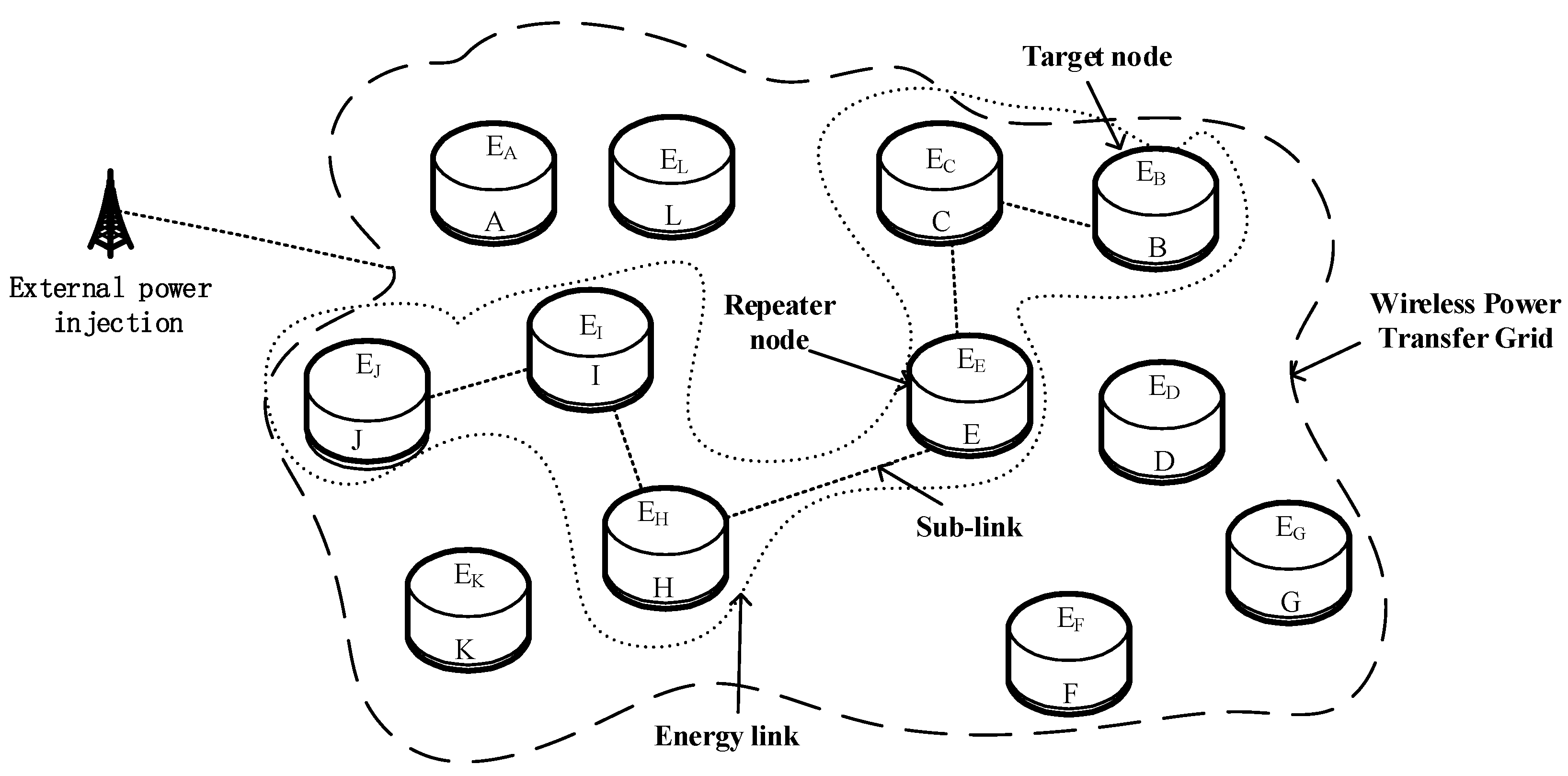
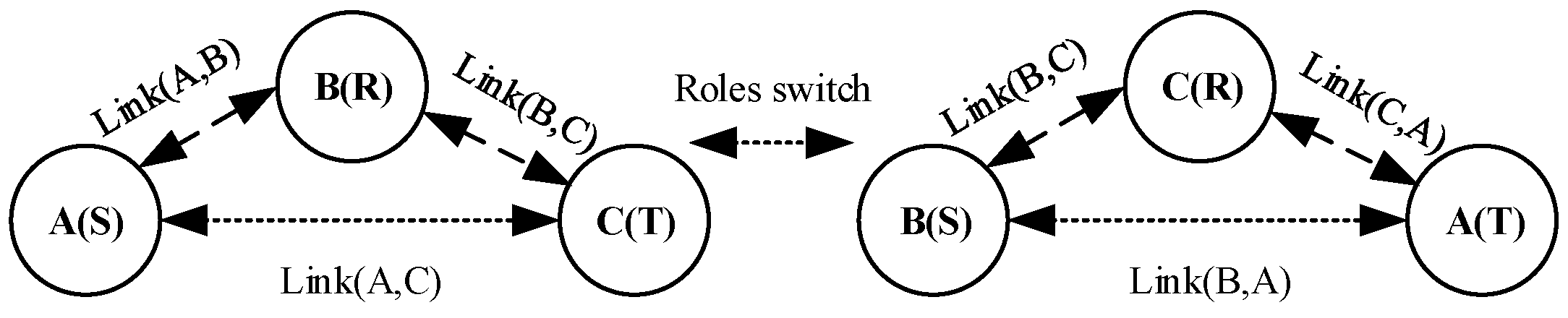
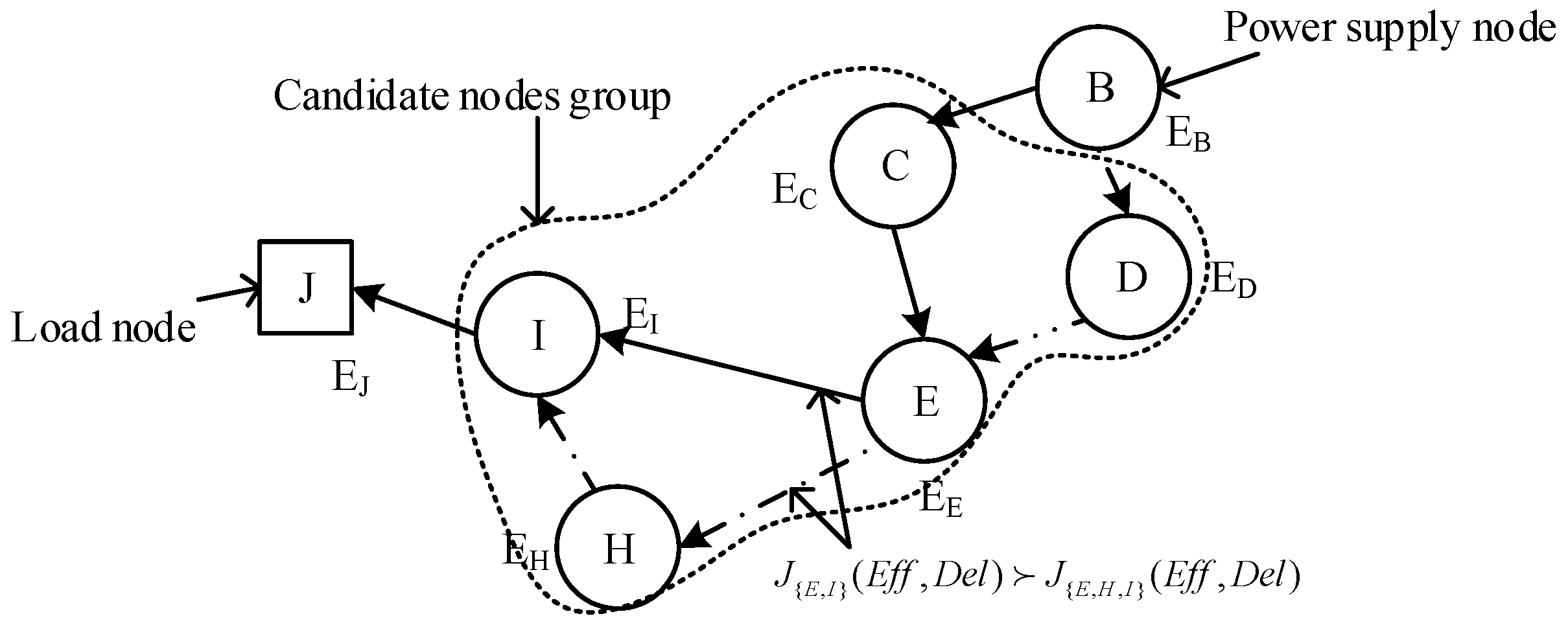
Without the external power injection, a certain node will be chosen as the power supply node S. Additionally, the power transfer process could be achieved from the power supply node S to the load node T through the repeater node R. As shown in Figure 2, power supply node A transfers power to load node C through repeater node B. Nevertheless, these roles are not fixed, and they will vary with the change of the load node. Thus, when node A calls for energy supplies and transforms into the load node, power supply node B transfers the power through repeater node C to meet its demand. Meanwhile, the bi-directional wireless power transfer [22,23] technology is introduced, which means the power transfer flow is reversible. - 4
- During the power transfer process, the involved nodes will suffer from the extra energy load, which is related to the detailed power conditioning performance. Due to the fact that it is beyond the scope of this paper, it will not be explained in detail.
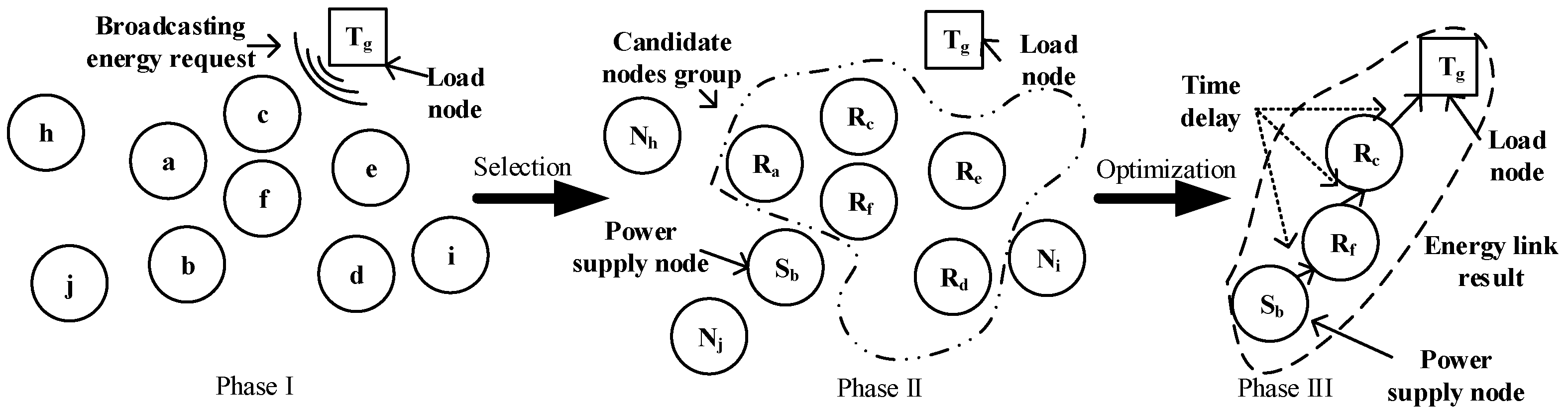
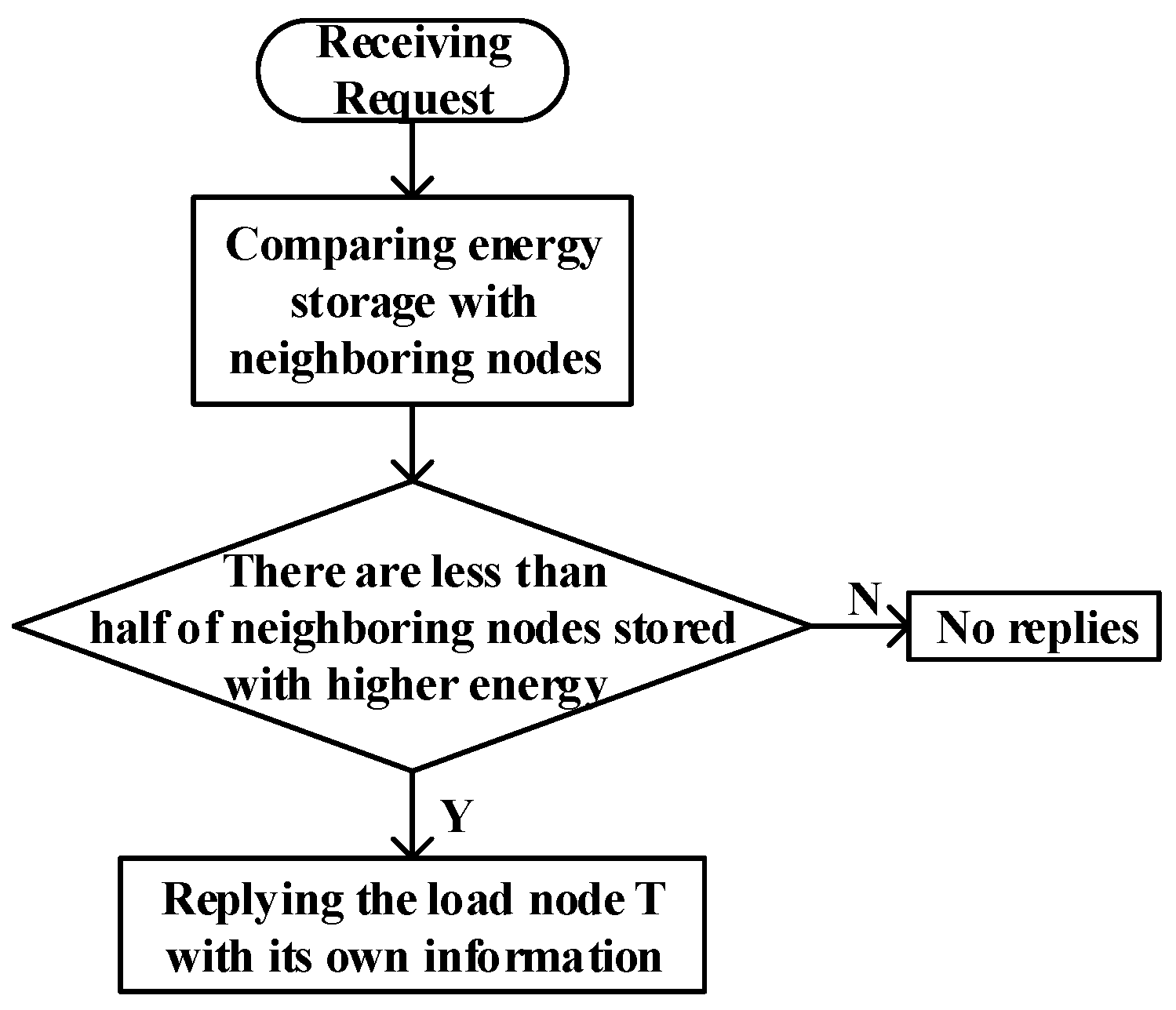
2.3. Grid Operating Mechanism
3. Energy Link Optimization Model
3.1. Energy Link Analysis
- Power transfer efficiency PTE: During the energy autonomy situation, the power demand of the load node is satisfied by the energy stored in other nodes. The PTE should be improved to reduce the power dissipation during the power transfer process.
- Time delay : The communications are undertaken to inform the repeater nodes to join the energy link; therefore, a time delay is introduced in the power transfer process. In order to improve its real-time performance, the time delay should be reduced.
- Energy load balance : If the nodes with small energy storage are selected to join the energy link, due to the extra energy load during the power transfer process, these will quickly be driven to reach the energy-disabled situation, which should be avoided. Hence, this extra energy load should be distributed among the nodes with higher energy storage to achieve the energy load balance in the WPTG. The minimum energy storage in the selected energy link is utilized to represent this index.
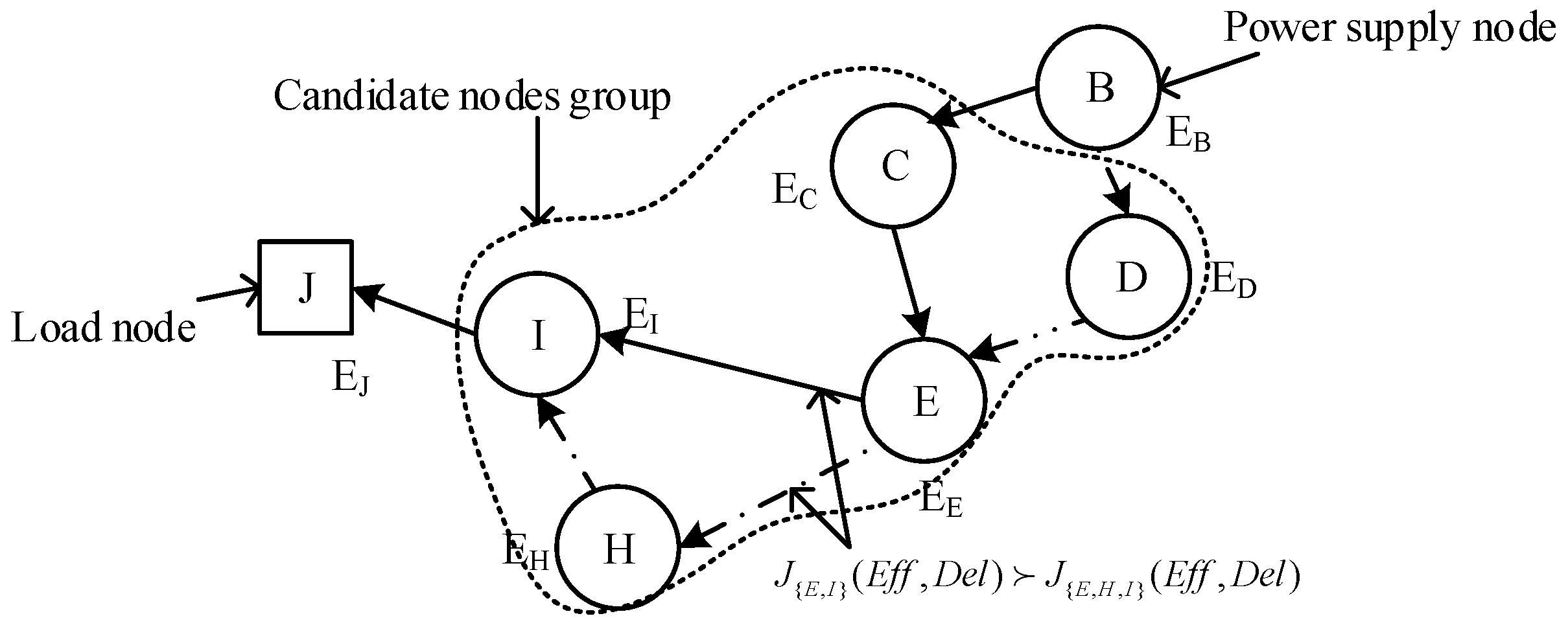
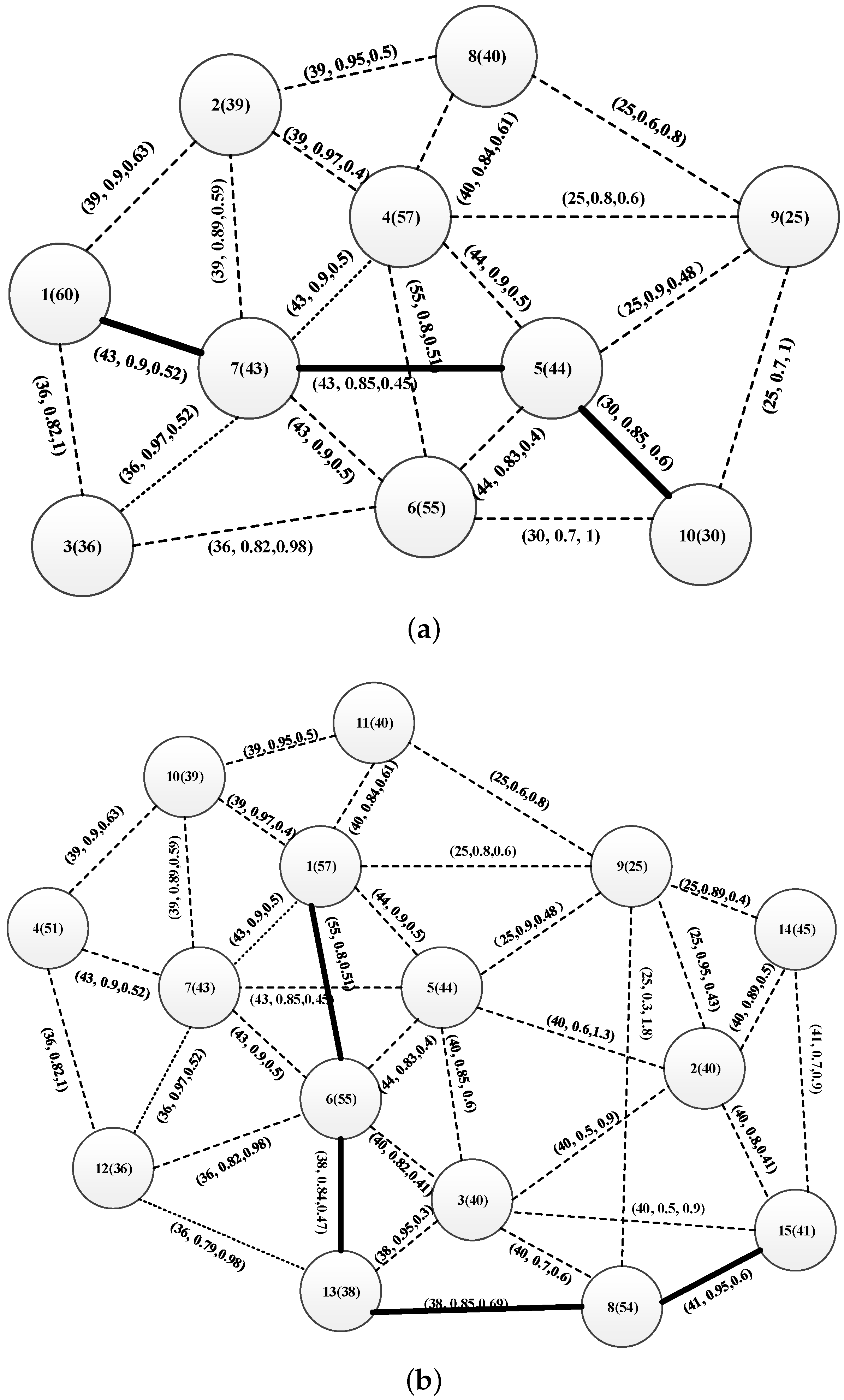
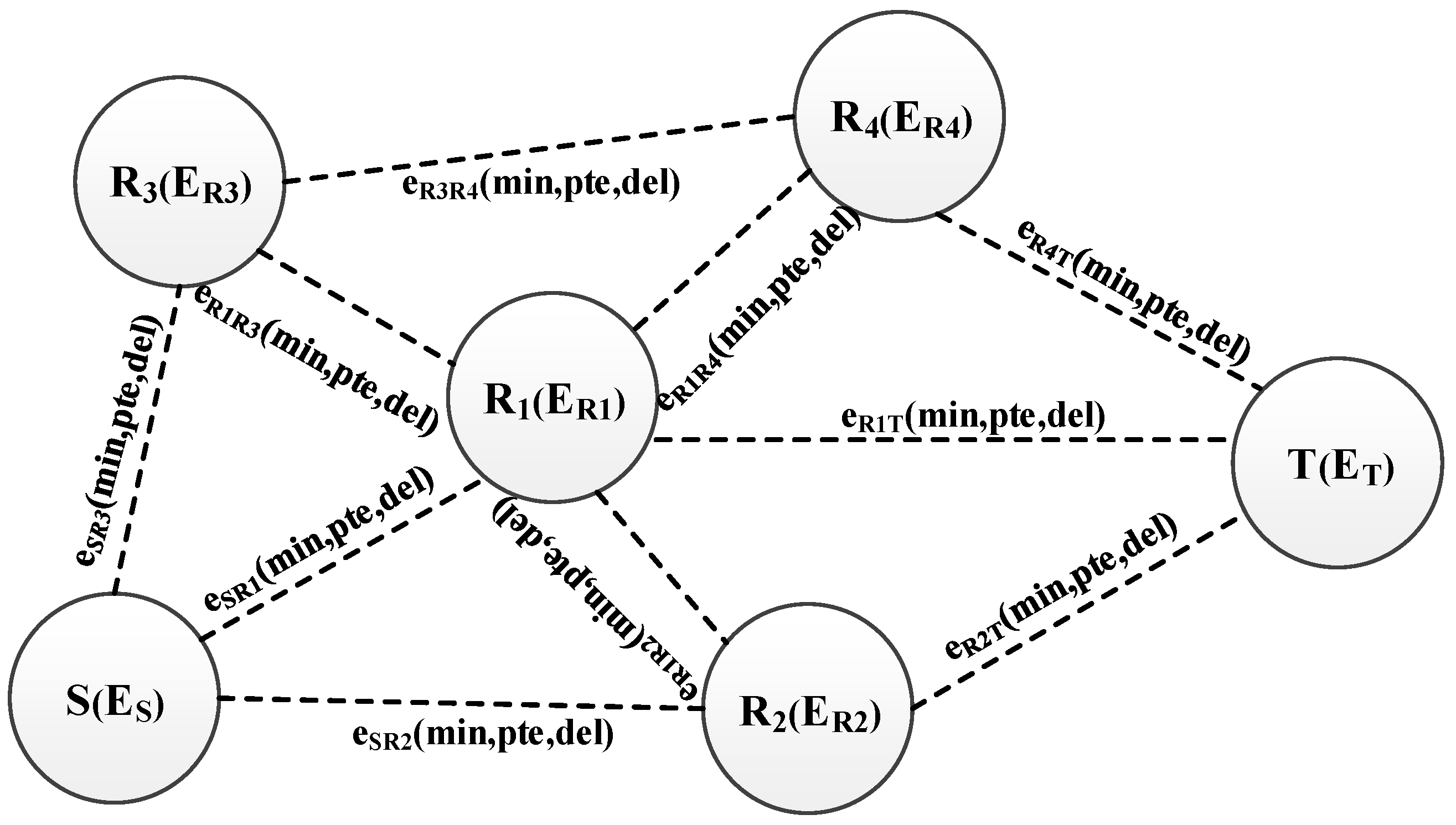
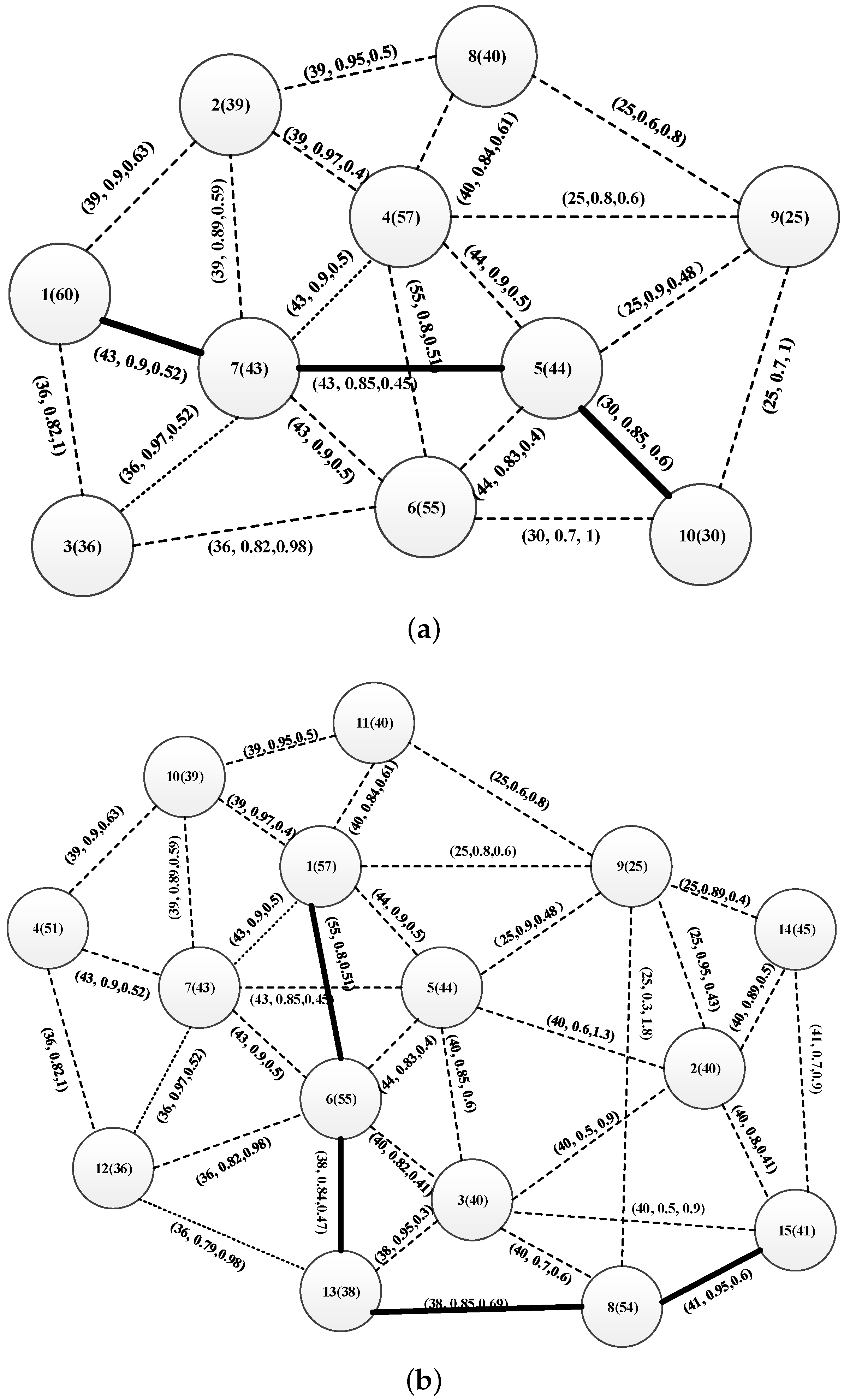
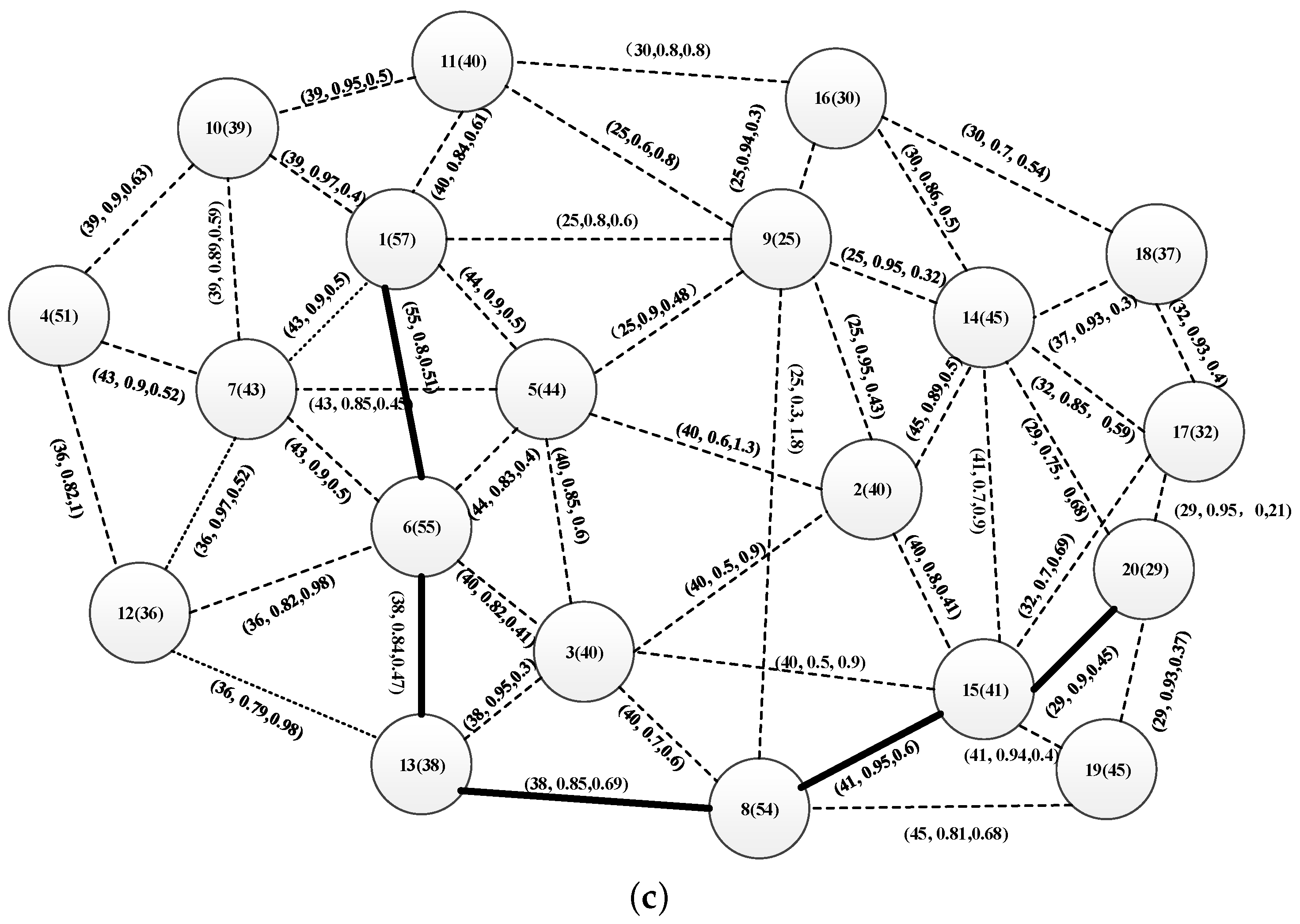
3.2. Optimization Graph
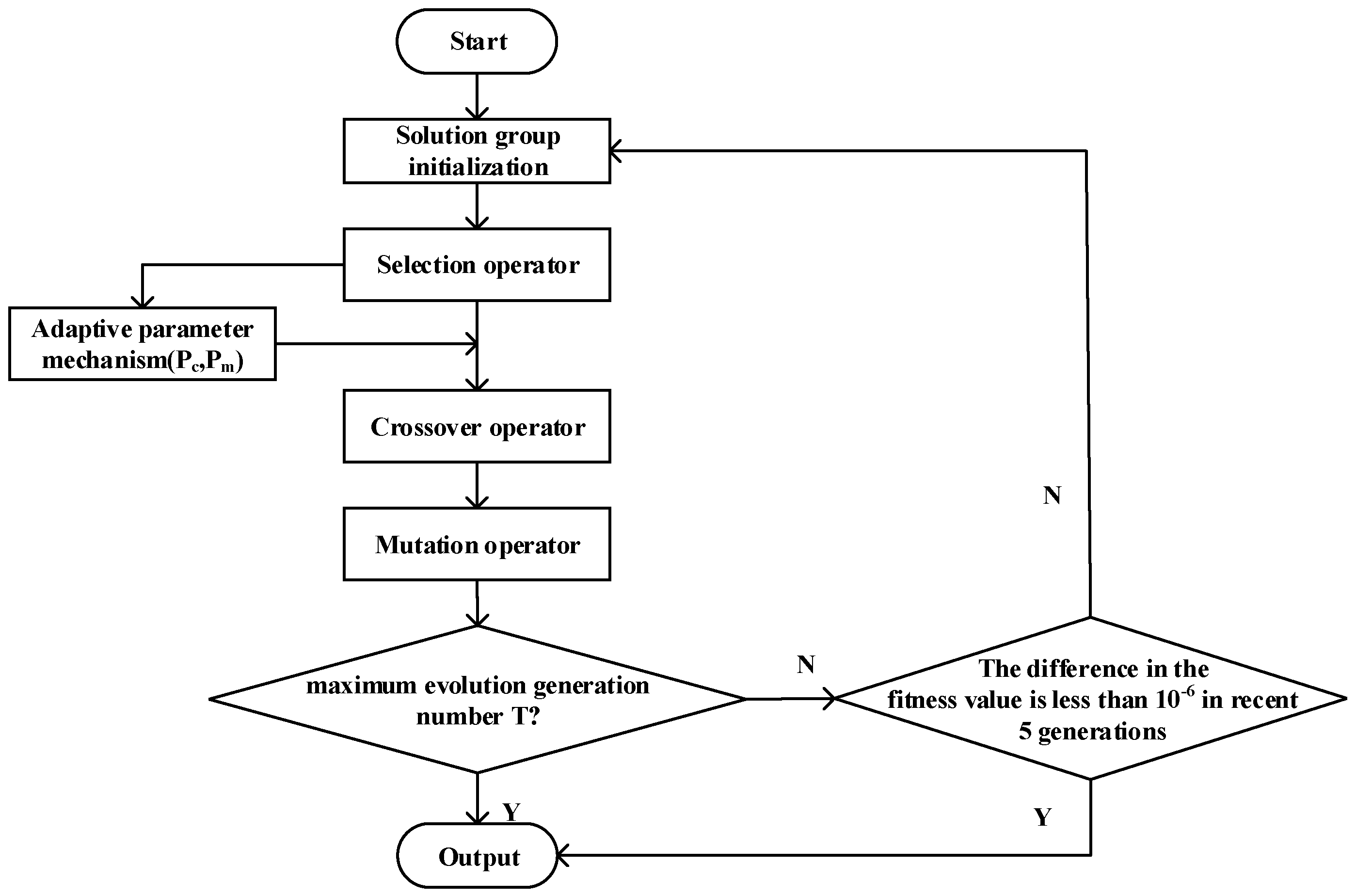
4. Energy Link Optimization Algorithm
4.1. Algorithm Initialization
4.2. Fitness Function
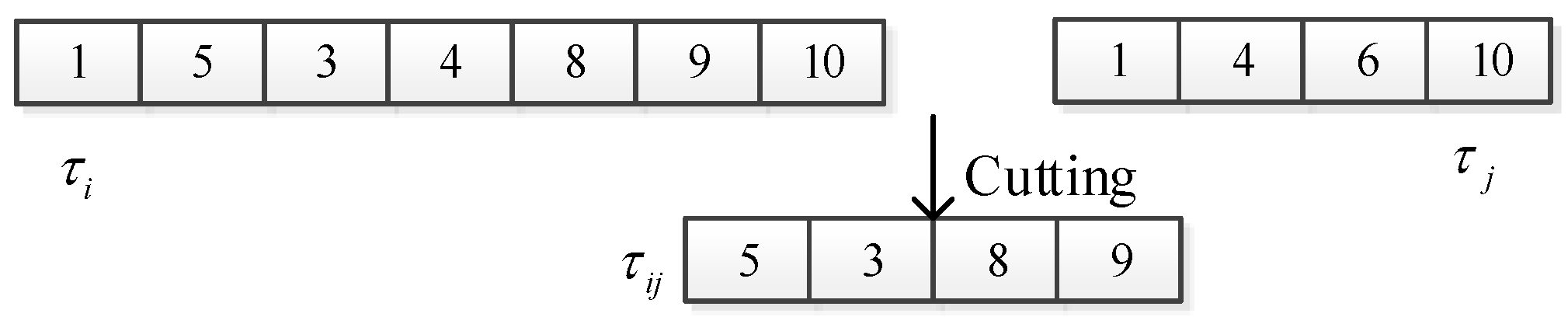
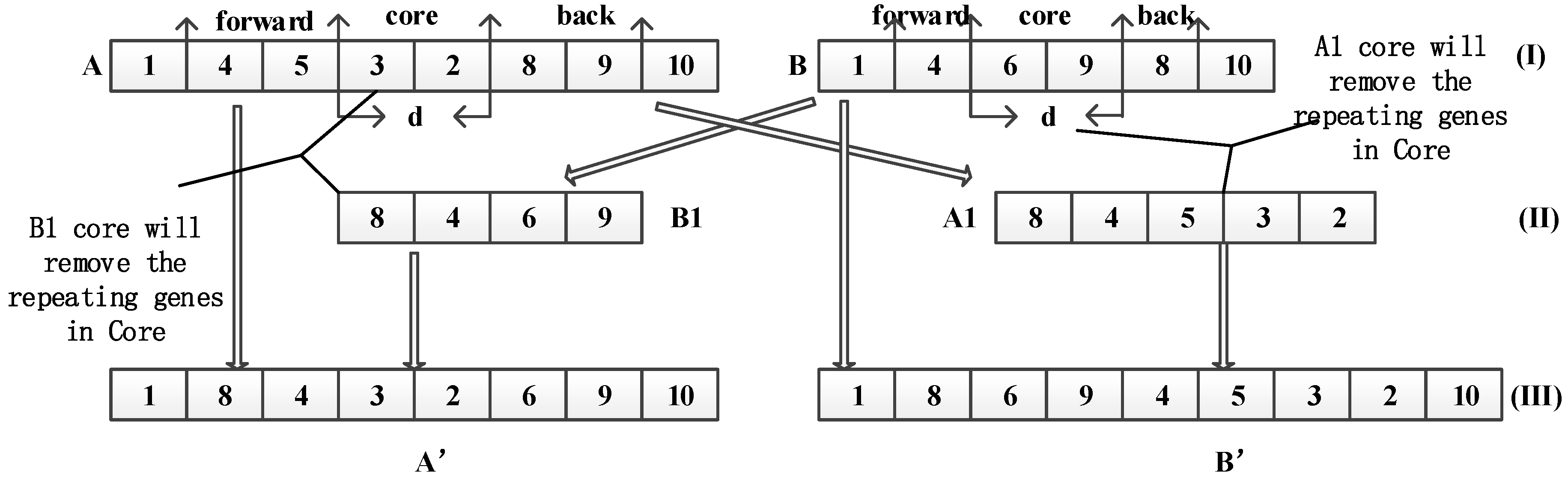
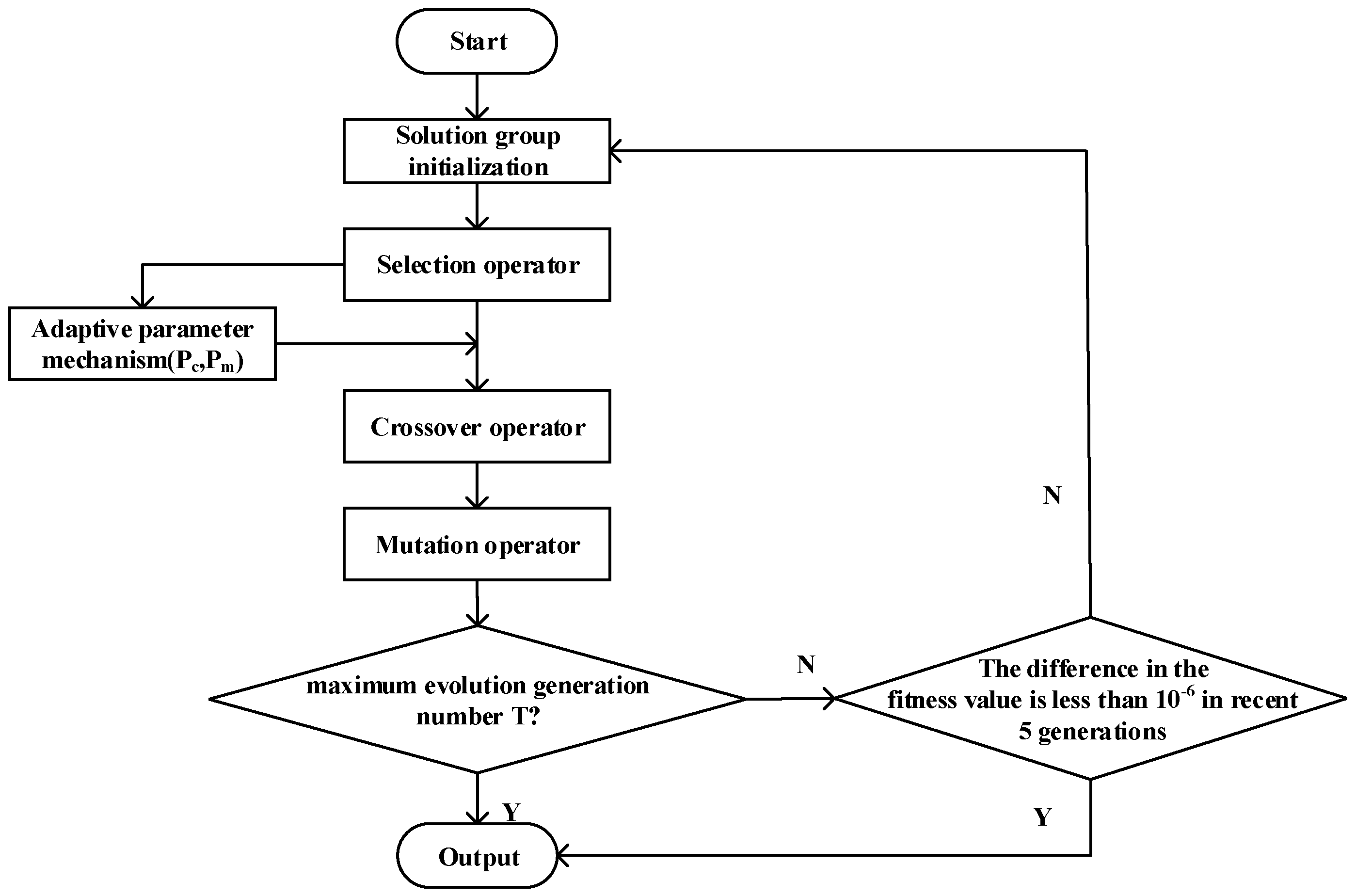
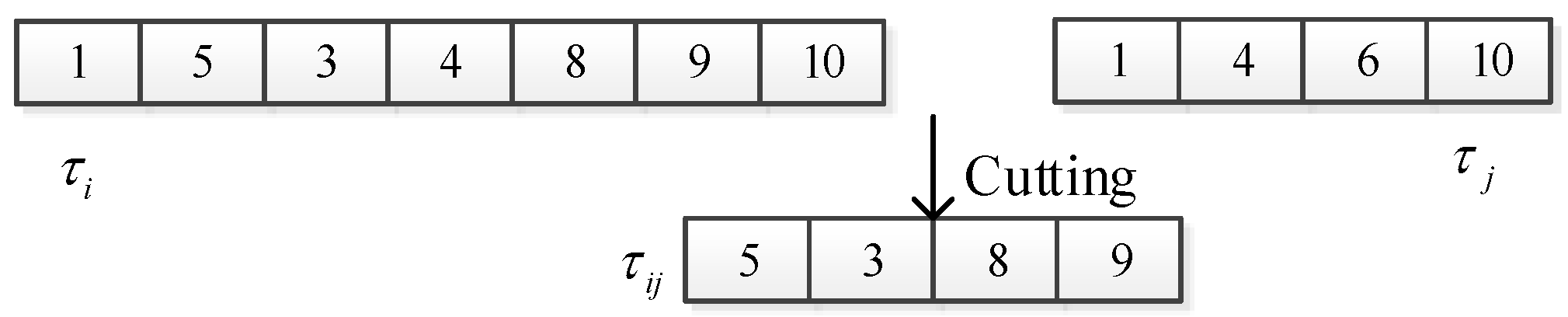
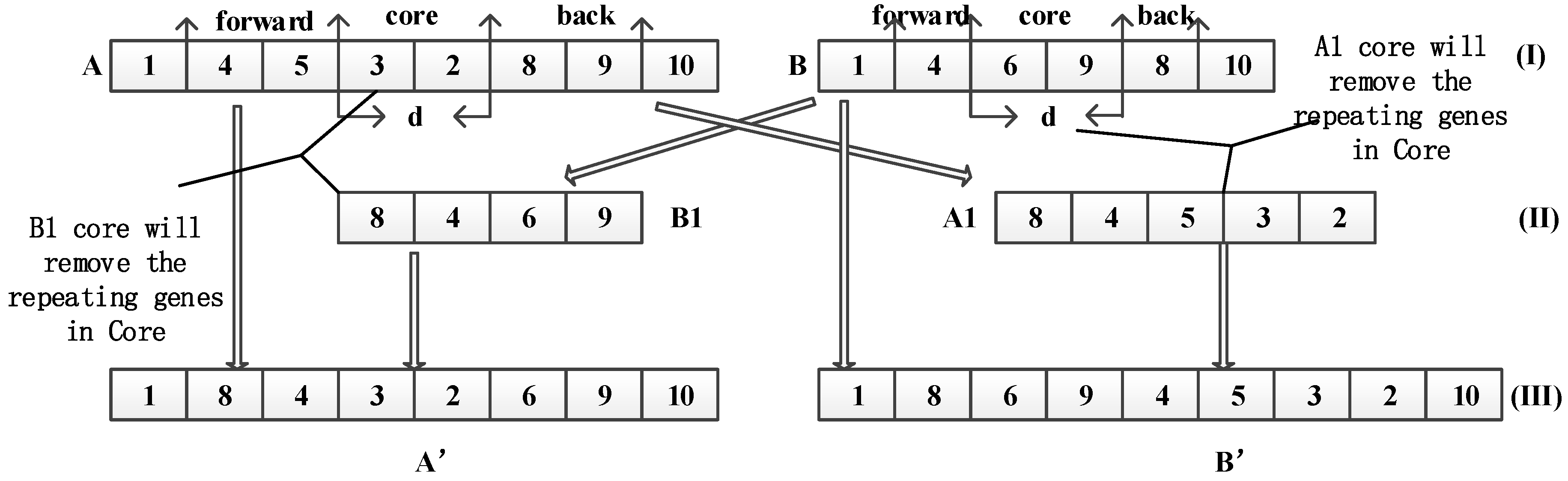
4.3. Algorithm Operators
4.4. Algorithm Adaptive Parameter Mechanism
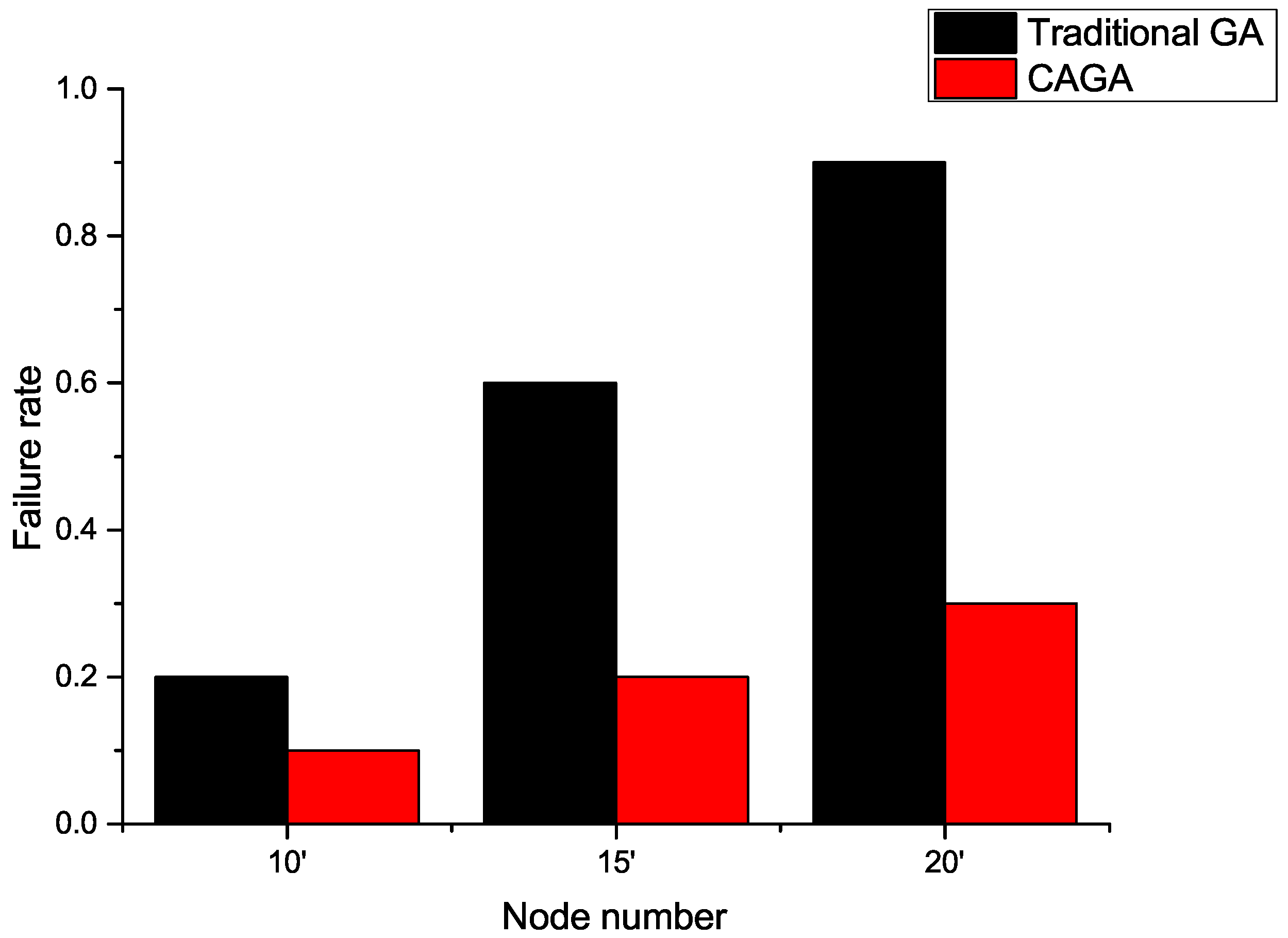
5. Simulation and Verification
6. Conclusions and Future Directions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| WPT | Wireless power transfer |
| WPTG | Wireless power transfer grid |
| PTE | Power transfer efficiency |
| CAGA | Concentration adaptive genetic algorithm |
References
- Hu, A.P. Selected Resonant Converters for IPT Power Supplies. Ph.D. Thesis, The University of Auckland, Auckland, New Zealand, 2001. [Google Scholar]
- Chwei-Sen, W.; Covic, G.A.; Stielau, O.H. Power transfer capability and bifurcation phenomena of loosely coupled inductive power transfer systems. IEEE Trans. Ind. Electron. 2004, 51, 148–157. [Google Scholar]
- Kurs, A.; Karalis, A.; Moffatt, R.; Joannopoulos, J.D.; Fisher, P.; Soljacic, M. Wireless power transfer via strongly coupled magnetic resonances. Science 2007, 317, 83–86. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.-H.; Li, Y.-P.; Sun, Y.; Tang, C.-S.; Lv, X. Load detection model of voltage-fed inductive power transfer system. IEEE Trans. Power Electron. 2013, 28, 5233–5243. [Google Scholar] [CrossRef]
- Vijayakumaran Nair, V.; Choi, R.J. An efficiency enhancement technique for a wireless power transmission system based on a multiple coil switching technique. Energies 2016, 9, 156. [Google Scholar] [CrossRef]
- Liu, C.; Hu, A.P. Effect of series tuning inductor position on power transfer capability of CCPT system. Electron. Lett. 2011, 47, 136–137. [Google Scholar] [CrossRef]
- Dai, J.; Ludois, D.C. Single active switch power electronics for kilowatt scale capacitive power transfer. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 315–323. [Google Scholar]
- Lu, F.; Zhang, H.; Hofmann, H.; Mi, C. A double-sided LCLC-compensated capacitive power transfer system for electric vehicle charging. IEEE Trans. Power Electron. 2015, 30, 6011–6014. [Google Scholar] [CrossRef]
- Huang, L.; Hu, A.P. Defining the mutual coupling of capacitive power transfer for wireless power transfer. Electron. Lett. 2015, 51, 1806–1807. [Google Scholar] [CrossRef]
- Krikidis, I.; Timotheou, S.; Zheng, G.; Ng, D.W.K.; Schober, R. Simultaneous wireless information and power transfer in modern communication systems. IEEE Commun. Mag. 2014, 52, 104–110. [Google Scholar] [CrossRef]
- Lu, P.; Yang, X.-S.; Li, J.-L.; Wang, B.-Z. A Compact frequency reconfigurable rectenna for 5.2- and 5.8-GHz wireless power transmission. IEEE Trans. Power Electron. 2015, 30, 6006–6010. [Google Scholar] [CrossRef]
- Yuan, F.; Jin, S.; Huang, Y.; Wong, K.-K.; Zhang, Q.-T.; Zhu, H. Joint wireless information and energy transfer in massive distributed antenna systems. IEEE Commun. Mag. 2015, 53, 109–116. [Google Scholar] [CrossRef]
- Ding, Z.-G.; Zhong, C.-J.; Ng, D.W.K.; Peng, M.-G.; Suraweera, H.A.; Schober, R.; Poor, H.V. Application of smart antenna technologies in simultaneous wireless information and power transfer. IEEE Commun. Mag. 2015, 53, 86–93. [Google Scholar] [CrossRef]
- Lin, F.-Y.; Covic, G.A.; Boys, J.T. Evaluation of magnetic pad sizes and topologies for electric vehicle charging. IEEE Trans. Power Electron. 2015, 30, 6391–6407. [Google Scholar] [CrossRef]
- Raval, P.; Kacprzak, D.; Hu, A.P. Analysis of flux leakage of a 3-D inductive power transfer system. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 205–214. [Google Scholar] [CrossRef]
- Sun, T.-J.; Xie, X.; Li, G.-L.; Gu, Y.-K.; Deng, Y.-D.; Wang, Z.-H. A two-hop wireless power transfer system with an efficiency-enhanced power receiver for motion-free capsule endoscopy inspection. IEEE Trans. Biomed. Eng. 2012, 59, 3247–3254. [Google Scholar] [PubMed]
- Lee, C.K.; Zhong, W.-X.; Hui, S.Y.R. Effects of magnetic coupling of nonadjacent resonators on wireless power domino-resonator systems. IEEE Trans. Power Electron. 2010, 27, 1905–1916. [Google Scholar] [CrossRef]
- Liang, H.; Zhuang, W. Stochastic modeling and optimization in a microgrid: A survey. Energies 2014, 7, 2027–2050. [Google Scholar] [CrossRef]
- Lin, F.Y. Smart distribution: Coupled microgrids. Proc. IEEE 2011, 99, 1074–1082. [Google Scholar]
- Sun, Y.; Yang, F.-X.; Dai, X. Construction of wireless power transfer networks based on improved ant colony optimization. J. South China Univ. Technol. 2011, 39, 146–164. [Google Scholar]
- Xiang, L.-J.; Sun, Y.; Dai, X.; Chen, Y.; Lv, X. Route optimization for wireless power transfer network based on the ce method. In Proceedings of the International Power Electronics and Application Conference and Exposition, Shanghai, China, 5–8 November 2014; pp. 630–634.
- Dai, X.; Sun, Y.; Su, Y.-G.; Tang, C.-S.; Wang, Z.-H. Study on contactless power bi-directional push mode. Proc. Chin. Soc. Electr. Eng. 2010, 30, 55–61. [Google Scholar]
- Madawala, U.K.; Thrimawithana, D.J. Current sourced bi-directional inductive power transfer system. IET Power Electron. 2011, 4, 471–480. [Google Scholar] [CrossRef]
- Clerc, M.; Kennedy, J. The particle swarm-explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evulut. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef]
- Zhan, Z.-H.; Zhang, J.; Li, Y.; Chung, H.S.H. Adaptive particle swarm optimization. IEEE Trans. Syst. Man Cybern. B 2009, 39, 1362–1381. [Google Scholar] [CrossRef] [PubMed]
- AlRashidi, M.R.; El-Hawary, M.E. A survey of particle swarm optimization applications in electric power systems. IEEE Trans. Evulut. Comput. 2009, 13, 913–918. [Google Scholar] [CrossRef]
- Hui, Q.; Zhang, H. Optimal balanced coordinated network resource allocation using swarm optimization. IEEE Trans. Syst. Man Cybern. Syst. 2015, 45, 770–787. [Google Scholar]
- Ho, S.L.; Yang, S. A computationally efficient vector optimizer using ant colony optimizations algorithm for multobjective designs. IEEE Tans. Magn. 2008, 44, 1034–1037. [Google Scholar]
- Gan, R.; Guo, Q.; Chang, H.; Yi, Y. Improved ant colony optimization algorithm for the traveling salesman problems. J. Syst. Eng. Electron. 2010, 21, 329–333. [Google Scholar] [CrossRef]
- Ding, C.; Cheng, Y.; He, M. Two-level genetic algorithm for clustered traveling salesman problem with application in large-scale tsps. Tsinghua Sci. Technol. 2007, 12, 459–465. [Google Scholar] [CrossRef]
- Ewald, G.; Kurek, W.; Brdys, M.A. Grid implementation of a parallel multiobjective genetic algorithm for optimized allocation of chlorination stations in drinking water distribution systems: Chojnice case study. IEEE Trans. Syst. Man Cybern. C 2008, 38, 497–509. [Google Scholar] [CrossRef]
- Liu, F.; Liang, S.; Xian, X. Optimal robot path planning for multiple goals visiting based on tailored genetic algorithm. Int. J. Comput. Intell. Syst. 2014, 7, 1109–1122. [Google Scholar] [CrossRef]
- May, G.; Stahl, B.; Taisch, M.; Prabhu, V. Multi-objective genetic algorithm for energy-efficient job shop scheduling. Int. J. Prod. Res. 2015, 53, 7071–7089. [Google Scholar] [CrossRef]
- Munetomo, M.; Taka, Y.; Sato, Y. A migration scheme for the genetic adaptive routing algorithm. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, San Diego, CA, USA, 11–14 October 1998; pp. 2774–2779.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Solution group size | 40 |
| Maximum evolution generations T | 50 |
| Initial crossover rate | |
| Initial mutation rate | |
| Trend recording number n | 3 |
| Constrain value for PTE | |
| Constrain value for time delay | |
| Constrain value for energy storage | 27 |
| Optimization Method | N = 10 | N = 15 | N = 20 |
|---|---|---|---|
| Traditional GA method | {1,2,4,5,10}/1.1 s | {1,7,6,13,8,15}/1.97 s | {1,5,3,13,8,15,20}/3.1 s |
| CAGA | {1,7,5,10}/0.88 s | {1,6,13,8,15}/1.43 s | {1,6,13,8,15,20}/1.91 s |
| Optimization Method | Index Weight | Optimized Energy Link | J | |||
|---|---|---|---|---|---|---|
| Traditional GA method | 0.3291 | 0.5494 | 2.76 | 38 | ||
| CAGA | 0.3096 | 0.5426 | 2.27 | 38 | ||
| Traditional GA method | 0.4011 | 0.5469 | 3.29 | 36 | ||
| CAGA | 0.3763 | 0.5869 | 2.69 | 38 | ||
| Traditional GA method | 0.5244 | 0.5469 | 3.29 | 36 | ||
| CAGA | 0.493 | 0.5087 | 2.3 | 40 | ||
| Traditional GA method | 0.0954 | 0.4362 | 2.12 | 40 | ||
| CAGA | 0.0922 | 0.3825 | 1.82 | 40 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Z.; Sun, Y.; Hu, A.P.; Dai, X.; Tang, C. Energy Link Optimization in a Wireless Power Transfer Grid under Energy Autonomy Based on the Improved Genetic Algorithm. Energies 2016, 9, 682. https://doi.org/10.3390/en9090682
Zhao Z, Sun Y, Hu AP, Dai X, Tang C. Energy Link Optimization in a Wireless Power Transfer Grid under Energy Autonomy Based on the Improved Genetic Algorithm. Energies. 2016; 9(9):682. https://doi.org/10.3390/en9090682
Chicago/Turabian StyleZhao, Zhihao, Yue Sun, Aiguo Patrick Hu, Xin Dai, and Chunsen Tang. 2016. "Energy Link Optimization in a Wireless Power Transfer Grid under Energy Autonomy Based on the Improved Genetic Algorithm" Energies 9, no. 9: 682. https://doi.org/10.3390/en9090682
APA StyleZhao, Z., Sun, Y., Hu, A. P., Dai, X., & Tang, C. (2016). Energy Link Optimization in a Wireless Power Transfer Grid under Energy Autonomy Based on the Improved Genetic Algorithm. Energies, 9(9), 682. https://doi.org/10.3390/en9090682